acc100assignment1
moshell控站-爱立信lte网管操作文档

一.每次接site必做Step4 cabx1.远程登录站点,使用OAM地址(IP地址)=moshell 200.86.246.10(SITE IP地址)会自检IP CONTACT,如果没有问题,会显示如下信息2.加载所有MO信息=lt allMO信息加载完毕,显示loaded MO个数和total MO个数3.查看site当前告警=Alt查询结果,当前站点有2个告警,that contrals external alarms.power and climate HW, cabinetIdetifier为没有装外部告警模块装外部告警模块M NTP system time sync fault为没有连接OSS告警处理方法Solution:1.LinkFailure =将RRU上下电即可2.ResourceConfigurationFailure=小区配置有问题,小区起不来3.ServiceUnavailable=S1接口连接失败,查询MME的IP地址是否设置正确,本次是因为MME的IP设置错误。
4.查看cell状态=st cell查看RRU,SECTOR命令都类似:ST RRU/ST SECTOR该site有1个cell,第一条为cell对应硬件地址和配置第二条显示cellid=CQL_40004_1,PROXT=813,状态为unlocked和enabled二.优化常用修改参数命令:1.找power对应参数=GET . POWER会输出很多参数,我们只关心如下Cell max transmissionpower=430dBmPartofsectorpower=100;CQL40004_1该小区分到了sector功率为100% confOutputpower=20; CQL40004_1小区输出功率为20wsectorpower=20;CQL40004_1对应sector输出功率为20W我们修改功率,只修改confOutputpower2.修改cell功率2.1 修改cell功率前,必须先毙掉cell,sector毙掉cell=bl cell,选择“Y”毙掉cell=bl sector,选择“Y”2.2 修改cell confoutputpower功率=set SectorEquipmentFunction=1 confOutputPower 20 SectorEquipmentFunction=1;修改对应MOconfOutputPower 20;修改cell功率为20W输入后,Moshell会询问是否修改confOutputPower,选择”Y”修改cell partOfSectorPower功率为90%=set EUtranCellTDD=CQL40004_1 partOfSectorPower 902.3修改cell功率后,再解放cell,sector解放cell=deb cell解放sector=deb sector备注:解放sector速度会比较慢,请等待3.查看频点=get . earfcn目前site频点为390504.修改频点4.1毙掉cell=bl cell4.2 查看对应MO可执行的命令=acl EUtranCellTDD=CQL40004_1EUtranCellTDD=CQL40004_1下可执行操作为changeFrequency4.3修改CQL40004_1频点=acc EUtranCellTDD=CQL40004_1 changeFrequency; moshell问是否执行,选“Y”备注:修改频点等大操作,命令为ACC, 普通修改为Set输入修改频点值391504.4解放小区=deb cell5.修改QRX接入门限5.1 查询QRX对应参数=GET . QRX(每个操作都应该毙解cell,以后的笔记中省略该步骤)查询结果,qRxLevMin和qRxLevMinOffset可修改5.2 修改qRxLevMin为-140(默认值)6.查询不清楚参数的含义=mom . pZeroNominalPucch; 查询pZeroNominalPucch参数含义pZeroNominalPucch参数的含义,range范围,默认值7.修改上行信道功率7.1 获取PZERO对应可执行操作, 上行控制和共享信道功率PZERO可执行的修改的参数为pZeroNominalPucch,pZeroNominalPusch,上行控制和共享信道功率7.2 修改上行控制信道功率= set EUtranCellTDD=CQL40004_1 pZeroNominalPucch -117把EUtranCellTDD=CQL40004_1的Pucch功率改为-1177.3修改上行共享信道功率= set EUtranCellTDD=CQL40004_1 pZeroNominalPusch -117把EUtranCellTDD=CQL40004_1的Pusch功率改为-1178.修改CFI8.1获取CFI对应可执行操作=GET . CFI8.2 CFI参数含义,默认CFI=0为自适应带宽的格式,CFI=1对应2个control symbol8.3 修改CFI=5;为根据UE个数自适应改变control symbol个数的模式=set EUtranCellTDD=CQL40004_1 pdcchCfiMode 59.修改传输模式9.1获取transmissionMode对应可执行操作=get . transmissionMode当前传输模式为3transmissionMode的解释9.2修改为常用传输模式2,3,7,810.修改PCI信息10.1 获取PCI信息=get . cellidPCI 2个参数,CELLIDGROUP=166和CELLID=0; PCI=166*3+0=49810.2修改CELLIDGROUP=16711.修改时隙配比11.1查看时隙配比=get . subframe该站点特殊子帧pattern=7,时隙子帧配比=2(默认3:1)subframeAssignment=1(2:2);subframeAssignment=2(3:1)11.2修改时隙配比为1(2:2)=set EUtranCellTDD subframeAssignment 1(微站使用SET命令,宏站使用SET1,且只能对整个site不能对单个cell修改)12.查看底噪12.1定义了IntferenceScanner统计,pmRadioRecInterferencePwr这个测量值12.2激活定义好的测量scanner状态=pdeb IntferenceScanner激活后,IntferenceScanner为active状态12.3查看定义的统计=PST, IntferenceScanner为active状态12.4查看site实际底噪= pget . pmRadioRecInterferencePwr$pmRadioRecInterferencePw i[16]为底噪打点分布区间,本站多分布在【3】12.5 查询pmRadioRecInterferencePwr参数含义= pmom . pmRadioRecInterferencePwr$16个区间对应的N+I分布值,【3】区间为-119~-118;一般N+I在=-106以上才有问题,不正常【11】正确情况,底噪应该多分布在【0】~【4】附录:可直接copy以下命令到moshell,进行底噪测试pcr IntferenceScanner EUtranCellTDD pmRadioRecInterferencePwrpdeb IntferenceScannerpstpget . pmRadioRecInterferencePwr$pmom . pmRadioRecInterferencePwr$13.添加系统常量13.1 找到管理系统常量的MO=PR SYSYEM; 此处为790 ENodeBFunction=1,SystemConstants=113.2查看该MO,ENodeBFunction=1,SystemConstants=1底下,可执行的操作;添加(Write)/删除(Reset)13.3增加一个系统常量= acc ENodeBFunction=1,SystemConstants=1 writeSystConst13.4 给新的系统常量赋值,name=220,value=15013.5 查看新的系统常量是否写正确=get ENodeBFunction=1,SystemConstants=1这里name=220,value=150的新系统常量已经写入实际用例:解决创意终端解调问题,增加该系统常量前,创意终端速率有毛刺,不平稳,增加该系统常量,速率平稳14.删除系统常量14.1 pr system14.2 acl ENodeBFunction=1,SystemConstants=114.3 acc SystemConstants=1 reset SystConstMoshell会提示删除的系统常量名,这里name=22015.查看历史告警查看历史告警=lga输入密码=rbslga -s 20130401 //查询历史操作,例如本指令是查20130401之后的操作查看链接失败的告警= lga | grep LinkFailure16.查看历史操作查看历史操作= lgolgo -s 20130411 //查询历史操作,例如本指令是查20130411之后的操作17.创建CV,备份; 基站配置倒回17.1查看以前的CV =CVLS查询到以前的一个CV范例17.2创建CV=CVMS 20130416(CV文件名)17.3倒回一个CV=CVSET 20130416(CV文件名)17.4 倒回CV后,重启基站,则基站会安装该CV配置进行重启和配置=ACC 0 MANUALRESTART17.5删除CV=CVRM 20130416(CV文件名)17.6 确认当前CV=CVLS;是否为需要倒回的CVExecuting: 20130415_before//是需要倒回的CV,CV名20130415_before18.重启基站18.1 查询ManagedElement=1这MO下可执行操作,manualRestart=ACL 018.2 重启基站=ACC 0 manualRestart18.3可选择0~3重启方式,0为热启动,只重启软件,2为冷启动,重启软件+硬件;常用0,218.4选择重启原因,一般选3=UNPLANNED_O_AND_M_ISSUE18.5输入具体重启信息,这里为test测试18.6 检查基站重启进度=POLU,如果有文件出错,会停在当前文件备注:POL,也可以检查进度,但它不论出错都会执行完毕18.7检查基站重启进度,如果重启完毕,返回如下检查基站重启进度,如果重启在进行中,返回如下18.8确认当前CV=CVLS;是否为需要倒回的CVExecuting: 20130415_before//是需要倒回的CV,CV名20130415_before19.查看小区下附着的UE数量(UE成功attached在该小区)= UE print -admitted20.查看系统信息(SI)的周期= get . sip //SI单位为frame(10ms)21.从网络结构上来看,查看板子的状态= ST PLUG该站有1个RRU,能看到硬件地址,状态,如用ST RRU,只能看到RRU状态,不能看到地址22.查看硬件状态= cabx宏站为DUL21,微站为DUL20;可看见RRU硬件位置,是否ON,有无FAULT;CELLID, PCI可见23.查看MME状态=ST MME24.查询命令用法=H+命令;范例=H SET1(查询SET1命令用法)SET1用于以下4个MO修改=tac, frameStartOffset, subframeAssignment, specialSubframePattern25.重启RRU25.1找到RRU板子位置=ST PLUG,这里位置为18725.2查看RRU板子上可执行操作=ACL 187(RRU板子位置)25.3重启RRU=ACC 187 RESTARTUNIT(187=RRU板子位置)25.4 查看RRU是否已经通=ST PLUG26.修改加密算法26.1查看加密算法优先级=get . algori26.2修改加密算法=SET SecurityHandling=1 cipheringAlgorithms 027.查看CELL根序列= get . rootseq每个cell都有一个rachRootSequence,SSV报告需要填写28.加载,加扰上行扰码需要加信号发生器;一般为下行加扰/加载28.1 查询是否加扰=GET . AILG加扰feature=false,加扰=false28.2查看site是否创建了AirIfLoadProfile这个MO= PR AirIfLoadProfile范例为已经创建AirIfLoadProfile,如果没创建,则返回为空,需要自己创建AirIfLoadProfile28.3创建MO, AirIfLoadProfile= CR ENodeBFunction=1,AirIfLoadProfile=1检查MO, AirIfLoadProfile是否创建成功=PR AirIfLoadProfile28.4 Set EUtranCellTDD ailgRef ENodeBFunction=1,AirIfLoadProfile=128.5 激活加扰/加载的feature=Set . featureStateAilg 128.6设置DL loadLevel 为70%,根据不同的需要也可以设置为其他的值= Set . dlPrbLoadLevel 7028.7做个CV,名为active_ailg= cvms active_ailg(此步骤可省略)28.8 解放该小区=DEB EUtranCellTDD=CQL40004_128.9 激活加扰=Acc EUtranCellTDD=CQL40004_1 startAilg备注:必须在cell active下修改alig,每次闭小区(bl EUtranCellTDD=XXX)或者站点重启,这个时候小区扰码已经关闭,都要重新执行acc EUtranCellTDD=XXX startAilg 才能再启动其实每次闭小区的时候都给自动去扰码了激活后,ailgActive true29. 获取SITE FEATRUE功能信息= get . feature会显示site所支持的feature和是否激活30.修改小区inactive timer30.1查询inactivity timer的配置=get . timer30.2修改inactivity timer为最大86400=SET Rcs=1 tInactivityTimer 8640031. PING IP31.1查MME PROXY=acl . ping752为OMM的proxy,760为MME proxy31.2查MME IP地址=get 760(MME PROXY)31.3 PING MME IP=ping 100.86.246.10备注:不能识别大写,只能小写32.查询site到核心网路由32.1查SITE 接口=get . interfaceIPinterface=1为OAM地址,IPinterface=2为业务地址查询IPinterface=1OAM路由=get hernet=1,IpInterface=133. 查看8通道天线feature是否激活= get . oct33.1激活8通道天线feature=set Licensing=1,OptionalFeatures=1,OctAntUlPerfPkg=1 featureStateOctAntUlPerfPkg 134.查看2通道天线feature是否激活= get . dualant34.1激活/关闭2通道天线feature= set Licensing=1,OptionalFeatures=1,DualAntDlPerfPkg=1 featureStateDualAntDlPerfPkg 0 (1为激活)35.修改TAC35.1查询cell TAC号=GET . TAC35.2修改CELL的TAC=SET 813 TAC 1(CELL PROXY=813,TAC=1)36. 修改小区PCI36.1.获取小区PCI信息= get . physic36.1修改cell 的physicalLayerCellIdGroup =set EUtranCellTDD=CQL40004_1 physicalLayerCellIdGroup 165备注:不能直接修改cellid,因为cellid的范围只有0-2,会和同站其他小区冲突,只能先修改physicalLayerCellIdGroup36.2 改physicalLayerCellIdGroup后,再改physicalLayerSubCellId=set EUtranCellTDD=CQL40004_1 physicalLayerSubCellId 1。
Kuebler 580X 582X增量编码器商品介绍说明书

• Sturdy model to industry standard, ø58 mm housing• Many variations, also customized versions • Short-circuit proof outputs • Reverse connection protection (at U B = 10 ... 30 V DC)• Highly flexible PUR-cable • Resolution up to 36000 ppr • High shaft loadShaft/hollow shaft 5800/5820: Standard5803/5823: High temperature up to 110 °C 5804/5824: Voltage sine wave outputs 5805: High resolution up to 36000 ppr 5826: Stainless steel housingMechanical characteristics:Electrical characteristics RS422/Push-pull:Speed with seal: Shaft version max. 12000 min -1Hollow shaft version 5)max. 000 min -1Speed without seal: Hollow shaft version max. 12000 min -1Rotor moment of inertia: Shaft version approx. 1.8 x 10-6kgm 2Hollow shaft version approx. 6 x 10-6kgm 2Starting torque: Shaft version < 0.01 NmHollow shaft version <0.05 Nm Radial load capacity of shaft*: 80 N Axial load capacity of shaft:*: 40 NWeight: approx. 0.4 kgProtection acc. to EN 60 529: IP 65, IP 66 for type 5826Working temperature: -20 °C ... +85 °C 1)2)3)5803/5823: -20 ... + 105 °C Shaft: stainless steel Shock resistance acc. to DIN-IEC 68-2-27 1000 m/s 2, 6 msVibration resistance acc. to IEC 68-2-6: 100 m/s 2, 10...2000 HzOutput circuit: RS 422 RS 422 Push-pull Push-pull (TTL-compatible) (TTL-compatible)Supply voltage: 5 V (±5%) or 5 ... 30 V DC 10 ... 30 V DC 5 ... 30 V DC 10 ... 30 V DCPower consumption (no load) – – typ. 55 mA / typ. 55 mA /without inverted signal: max. 125 mA max. 125 mA Power consumption (no load) typ. 40 mA / typ. 40 mA / typ. 80 mA/ typ. 80 mA/with inverted signals: max. 90 mA max. 90 mA max.150 mA max.150 mA Permissible load/channel: max. ±20 mA max. ±20 mA max. ±30 mA max. ±30 mA Pulse frequency: max. 300 kHz max. 300 kHz max. 300 kHz max. 300 kHz Signal level high: min. 2.5 V min. 2.5 V min. UB-2.5 V min. UB-1.5 V Signal level low: max. 0.5 V max. 0.5 V max. 2.0 V max. 2.0 V Rise time t r max. 200 ns max. 200 ns max. 1 µs max. 1 µs Fall time t f max. 200 ns max. 200 ns max. 1 µs max. 1 µs Short circuit proof outputs:1): yes 2) yes 2) yes yes Reverse connection protection at U B : 5 V: no, 1 yes yes no 0 ... 30 V: yes UL certified File 224618Conforms to CE requirements acc. to EN 61000-6-2, EN 61000-6-4 and EN 61000-6-3RoHS compliant acc. to EU guideline 2002/95/EG1)If supply voltage correctly applied2)Only one channel allowed to be shorted-out:(If UB=5 V, short-circuit to channel, 0 V, or +UB is permitted)(If UB=5-30 V, short-circuit to channel or 0 V is permitted)1) Constant flexing: -20 ... +70 °C 2)Non-condensing3)Hollow shaft version with seal: -20 ... +80 °C 5) For continuous operation 3000 min -1, ventilatedElectrical characteristics sine wave output:Output circuit: Sine wave Sine wave U = 1 Vpp U = 1 Vpp Supply voltage: 5 V (±5%) 10 ... 30 V DC Current consumption typ. 65 mA / typ. 65 mA / (no load) with inverted signals: max. 110 mA max. 110 mA -3 dB frequency: <180 kHz <180 kHz Signal level channels A/B: 1 Vpp (±20%) 1 Vpp (±20%) Signal level channel 0: 0.1 ... 1.2 V 0.1 ... 1.2 V Short circuit proof outputs:1): yes yes Reverse connection protection at UB: no yes UL certified File 224618Conforms to CE requirements acc. to EN 61000-6-2, EN 61000-6-4 and EN 61000-6-3RoHS compliant acc. to EU guideline 2002/95/EG1) If supply voltage correctly appliedTop view of mating side, male contact base:12 pin plug7 pin plug10 pin plugDimensions shaft version:Clamping flange ø 58Flange Type 1Mounting advice:The flanges and shafts of theencoder and drive should not both be rigidly coupled together at thesame time! We rec-ommend the use of suitable couplings (see Accessories section).I n c r e m e n t a l E n c o d e r sSignal: 0 V 0 V +U B +U B A A B B 0 0 Schirm Sensor 2) Sensor 2)12-pin. Connector, Pin: 10 11 12 2 5 6 8 1 3 4 PH 1)7-pin. Connector, Pin: F –- D E A – B – C - G 10-pin. Connector, Pin: F - D E A G B H C I J Cable colour: 5800, 5803, WH WH . BN BN . GN YE GY PK BU RD 5804, 5805, 5823, 5824, 5825: 0,5 mm 2 0,5 mm 2Cable colour: 5820, 5826: WH GY PK BN BU RD GN YE GY PK BU RDTerminal assignment1) PH = Shield is attached to connector housing2) The sensor cables are connected to the supply voltage internal-ly if long feeder cables are involved they can be used to adjust or control the voltage at the encoder- If sensor cables are not in use, they have to be isolated or 0 V Sensor has to be connected to 0 V and U BSensor has to be connected to U B- Using RS 422 outputs and long cable distances, a wave impedance has to be applied at each cable end.Isolate unused outputs before initial startup.Synchronous flange ø 58Flange Type 2- flexibly installed: 70 mmDimensions shaft version:3 x M3, 5 [0,2] deepOrder code shaft version:8.580X.XXXX.XXXXType00 =Standard03 =High temperature 04 =Sine wave 05 =High resolutionFlange1 = Clamping flange ø 582 = Synchronous flangeø 58Shaft (ø x L)1 = ø 6 mm x 10 mm2 = ø 10 mm x 20 mmType of connection and supply voltage Type 58004 = RS 422 (with inverted signal)5 V supply voltage5 = RS 422 (with inverted signal)10 ... 30 V supply voltage6 = Push-pull (with inverted signal)10 ... 30 V supply voltage7 = Push-pull (without inverted signal)10 ... 30 V supply voltage8 = Push-pull (without inverted signal)5 ... 30 V supply voltage9 = Push-pull (with inverted signal)5 ... 30 V supply voltageY = RS 422 (with inverted signal)5 ... 30 V Supply voltageT = Push-Pull (with inverted signal)5 ... 30 V supply voltagePulse rate25, 50, 60, 100, 125, 200, 250, 256, 300, 360, 500, 512, 600, 720, 800, 1000, 1024, 1200, 1250, 1500, 2000, 2048, 2500, 3000,3600, 4000, 4096, 5000Type 5805: 6000, 7200, 8000, 8192,9000, 10000, 18000, 36000(e.g. 250 pulses => 0250)Other pulse rates available on requestType of connection1 = Cable axial (1 m PUR-Cable)2 = Cable radial (1 m PUR-Cable)3 = axial 12 pin plug withoutmating connector5 = radial 12 pin plug withoutmating connector W 1)= 7 pin plug, "MIL"-specified 2)without mating connector, radial Y = 10pin plug, "MIL"-specified 2)without mating connector, radial1)only with output 72)only for type 5800Accessories:Corresponding mating connector to connection type 3 or 5:Order-No. 8.0000.5012.0000Corresponding mating connector to connection type W:Order-No. 8.0000.5052.0000Corresponding mating connector to connection type Y:Order-No. 8.0000.5062.0000Cables and connectors, also pre-assemb-led, can be found in the chapter Counting TechnologyMounting attachments and couplings can be found in the Chapter AccessoriesP r e f e r r e dt y p e s a r e i n d i c at e d i n b o l dType 5803 and 58054 = RS 422 (with inverted signal)5 V supply voltage5 = RS 422 (with inverted signal)10 ... 30 V supply voltage6 = Push-pull (with inverted signal)10 ... 30 V supply voltage7 = Push-pull (without inverted signal)10 ... 30 V Supply voltageType 58041 = Sine, 1 Vpp (with inverted signal)5 V supply voltage2 = Sine, 1 Vpp (with inverted signal)10 ... 30 V Supply voltageDimensions hollow shaft:Flange Type 3 and 4 with stator couplingCyl. pin acc. to DIN 7 ø 4Mounting advice:1)The flanges and shafts of the encoder and drive should not both be rigidly coupled together at the same time.2)When mounting a hollow shaft encoder,we recommend using a torque stop pin that fits into the torque stop slot or a sta-tor coupling.3)When mounting the encoder ensure the dimension Lmin. is greater than the axial maximum play of the drive. Otherwise there is a danger that the device could mechanically seize up.Note: minimum insertion depth 1.5 x D hollow shaftM3, 5 [0,2] deepI n c r e m e n t a l E n c o d e r sOrder code hollow shaft version:8.582X.XXXX.XXXXType20 =Standard23 =High temperature 24 =Sine wave 25 =High resolution 26 =Stainless steelFlange1 = Flange for through shaft2* = Flange for blind hollow shaft*3* = Flange for through shaft andstator coupling4* = Flange for blind hollow shaft andstator couplinglength of drive shaft £30 mm*not for type 5826Hollow shaft**1 = ø 6 mm without seal2 = ø 6 mm with seal3 = ø 8 mm without seal4 = ø 8 mm with seal5 = ø 10 mm without seal6 = ø 10 mm with seal7 = ø 12 mm without seal8 = ø 12 mm with sealFor type 5826 only versions 6 and 8 are possiblePulse rate25, 50, 60, 100, 125, 200, 250, 256, 300, 360, 500, 512, 600, 720, 800, 1000, 1024, 1200, 1250, 1500, 2000, 2048, 2500, 3000,3600, 4000, 4096, 5000Type 5825: 6000, 7200, 8000, 8192,9000, 10000, 18000, 36000(e.g. 250 pulses => 0250)Other pulse rates available on requestType of connection1 = Cable radial (1 m PVC-cable)21) = radial 12pin plug withoutmating connector1)not for type 5826Type of connection and supply voltage Type 5820 and 58261 = RS 422 (with inverted signal)5 V supply voltage2 = Push-pull (without inverted signal)10 ... 30V supply voltage3 = Push-pull (with inverted signal)10 ... 30V supply voltage4 = RS 422 (with inverted signal)10 ... 30 V supply voltage5 = Push-pull (without inverted signal)5 ... 30 V supply voltage6 = Push-pull (with inverted signal)5 ... 30 V supply voltage7 = RS 422 (with inverted signal)5 ... 30 V supply voltageC* =Push-pull (7272 with inverted sig-nal)5 ... 30 V supply voltage * For Type 5826 not availableType 5823 and 58251 = RS 422 (with inverted signal)5 V supply voltage2 = Push-pull (without inverted signal)10 ... 30V supply voltage3 = Push-pull (with inverted signal)10 ... 30V supply voltage4 = RS 422 (with inverted signal)10 ... 30 V supply voltageType 58241 = Sine, 1 Vpp (with inverted signal)5 V supply voltage2 = Sine, 1 Vpp (with inverted signal)10 ... 30 V supply voltageP r e f e r r e dt y p e s a r e i n d i c at e d i n b o l dAccessoriesCorresponding mating connector to Type of connection 2,12 pin: Order No. 8.0000.5012.0000 pin assignment cwVarious mounting variations can be suppliedDelivery includes:1 x parallel pin with thread Order No. 8.0010.4700.00001 x mounting flanges Order No. T.035.009Screw M3x5Order No N.630.3051 x long torque support slot Order No. T.051.672Complete set:Order No. 8.0010.4600.0000Mounting kit for hollow shaft encoder ø 58 mm:Stator coupling two wings– For highly dynamic applications Includes:1x coupling two wings 2x 2 screwsComplete set:Order No. 8.0010.4D00.0000Tether arm shortOrder No. 8.0010.4R00.0000– Cables and connectors, also pre-assemb-led, can be found in the chapter Counting Technology– Mounting attachments and couplings can be found in the Chapter Accessories。
SAP屠夫SAP作品汇总(精华版)

SAP屠夫作品汇总Table of ContentsTable of Contents (2)General Settings (16)检查度量单位(Check Units of Measurement) (16)Financial Accounting (19)Financial Accounting Global Settings (19)例1功能范围的应用. (19)例2业务范围(Business Area) (19)年度变式(Fiscal Year) (19)会计凭证(Document) 如何限制不同财务用户使用不同的财务凭证类型 (22)Field status和Coding block subscreen (30)Validation凭证的确认 (35)Substitution凭证的退代 (40)3几个相关函数FI_V ALIDATION_DOC|FI_V ALIDATION_HEADER (45)货币类型和外币评估 (50)ERP货币类型和外币业务 (56)(一)ERP货币设置 (57)(二)汇率类型和汇率换算表(Tcode:OB07|OB08) (59)(三)平行货币 (62)汇率与外币评估 (63)财务分类帐 (92)Tax on Purchase & Sales (100)大话MM定价增值税处理 (100)SAP 税务配置. (108)SD篇tax (112)SD一周通系列 (114)SD定价实例 (118)收入科目确定. (119)税务设置 (119)特别总帐 (Special Purpose Ledger) (128)1基本设置(Basic Settings) (129)(1)Perform Preparation (129)(2) Maintain Coding Block (130)(3) Tables (133)(4) Maintain Table Directory (138)(5) Maintain Fixed Field Movements (139)(6) Master Data (139)(7) Production Start-Up Preparation (145)(8) Validation (146)(9) Substitution (146)(10) User Exits (146)2计划(Planning) (146)3实际过帐(Actual Posting) (146)4期间处理(Periodic Processing) (146)5信息系统(Information System) (146)6工具(Tools) (146)例1 使用SPL出中方会计报表 (146)例2 维护coding block screen (148)EC-CS Consolidation (148)合并会计处理方法 (148)第14夜:合并数据建模 (149)一.建立合并源数据基础信息立方体(Tcode:RSA1). (149)二.建立合并数据基础信息立方体(Tcode:RSA1) (150)三.BCS建模(Tcode:UCWB,UCWB01,UCMP0) (151)(1).建立合并数据基础 (151)(2).设置合并范围 (155)(3).设置合并参数(Tcode:UCMP0) (157)(4).设置合并源数据基础 (157)(5).合并会计科目表和合并频率设置 (158)(6).BCS60数据增强的功能 (158)例1 使用混合合并单元 (159)例2 BCS和ECCS等合并系统简单对比 (160)第五节子分配和细分类别 (161)SAP会计科目自动分配配置大全 (167)1 Maintain Accounting Configuration(概览) (167)2 Automatic Posting Configuration (MM Module) (168)例1:如何使用Valuation group code (177)例2 PO condition和OBYC (179)例3使用PO处理委外加工 (179)例4 Account assignment的逻辑分析 (179)例5采购运费处理 (179)例6:P&L科目和成本要素的建立 (180)例7采购科目分配设置 (180)例8汇率变更影响发票校验 (180)例9月结GR/IR处理 (180)戏说一下SAP的清帐 (180)Vendor的AP和Customer的AR能被对清,需要在Vendor和customer主数据设置一下, (186)如图7-[2],在vendor的control页的Account control的Customer填上Customername 80005803. (186)如图8-[2],在payment transaction accountings页选上Clng with Cust.标志 (186)Asset Accounting (194)折旧方法和折旧码 (194)使用Substitution退还固定资产折旧某资产折旧的费用科目和折旧金额 (201)FB08如何reverse多余的折旧凭证. (214)应收应付(Accounts Receivable and Accounts Payable)配置 (222)Report painter外资公司如何出中方式报表. (230)FICO统驭和中间清算 (241)Field status and Coding block subscreen 字段状态组实例 (246)特别总帐标识 (251)预付款处理 (254)目的 (254)流程 (254)预付款结帐 (254)发票冻结(Invoice Block) (255)Dunning AR催款配置 (258)浅谈表结法和帐结法 (265)1.结转收入 (266)2. 结转费用. (266)营业管理财务各期间费用 (266)所得税费用等等 (266)Company和Company Code的区别 (268)Investment Management (269)投资管理 (269)投资计量 (272)投资订单预算 (274)Treasury (277)现金管理和预算控制 (277)第一节现金管理配置 (278)第二节现金管理业务操作 (286)现金管理一日通 (291)CO - Controlling (302)Internal Order 内部订单 (302)第一节订单主数据 (304)第二节订单审批 (307)第三节订单计划 (313)第四节内部订单预算 (313)第五节结算规则自动生成 (316)内部订单(Internal Orders) 审批流程配置 (318)1 订单主数据 (319)[1]激活订单管理(Tcode:OKKP) (319)[2]定义订单类型(Tcode: KOT2|KOT2-OPA|KOT2_FUNCAREA) (320)[3]维护订单编号范围(Tcode:KONK) (322)[4]定义状态主文件(Tcode:OK02|BS02) (322)[5]定义受权码(Tcode:BS52/BS53) (324)[6](Tcode:KOV2) (324)[7]分配状态管理给订单类型(Tcode: (324)例1.设置订单审批流程 (324)例2.使用投资订单管理固定资产项目 (328)CO-CCA Cost Center Accounting (328)分配分摊 (328)最牛B最灵活的分配分摊依据--统计指标 (336)作业类型 (348)一建立type 43次级成本要素(Tcode:KA06) (349)Act Ind. deter&Alloc (349)二建立作业类型(Tcode:KL01) (349)三建立生产成本中心(Tcode:KS02) (352)四成本中心作业量计划(Tcode:KP26|KP27) (353)Cost center CCTR3 has none of the activity types used here (353)五建立成本中心费用计划(Tcode:KP06|KP16/KP17/KP36/KP37) (355)六计算计划价格(Tcode:KSPI) (357)七维护分割结构(Tcode:OKES/OKEW) (358)八建立工作中心. (367)Activity type ACTMN is not allowed for business transaction RKL (367)九建立统计指标 (368)十重过帐和直接作业分摊 (368)十一分配分摊 (368)CO-PC (377)Costing Sheet 成本核算单 (377)[1].Define Origin Groups(Tcode:OKZ1) (378)[2].Maintain Overhead Cost Elements(Tcode:KA06) (379)[3].Define Costing sheets (379)[4].Define Calculation Bases (381)[5].Define Percentage Overhead Rates(Tcode:S_ALR_87008275) (382)[6].Define Quantity_Based Overhead Rates (383)[7].Define Credits (384)[8].Develop Enhancement (384)[9].Define Overhead Key (385)[10].Define Overhead Group (385)[11].Define Cost Component Structure(Tcode:OKTZ) (386)[12].Error Management (386)使用成本核算单的标准成本估算实例。
Schurter CPS 电容触摸开关说明书
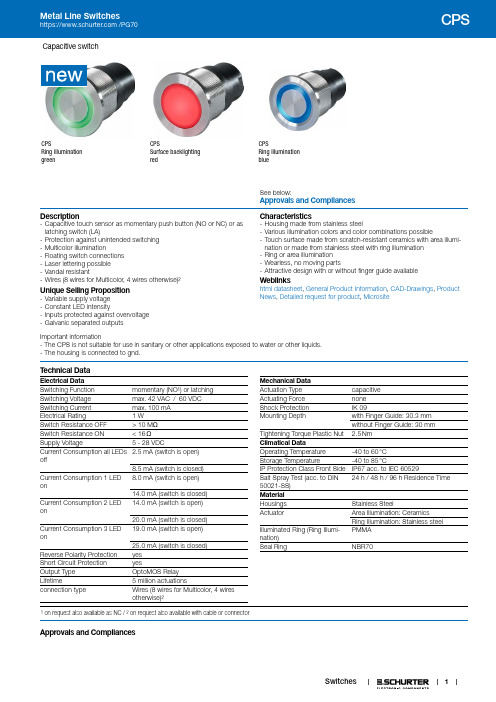
1Capacitive switchCPSRing illuminationgreen CPSSurface backlightingred CPSRing illuminationblueSee below:Approvals and CompliancesDescription- Capacitive touch sensor as momentary push button (NO or NC) or as latching switch (LA)- Protection against unintended switching - Multicolor illumination- Floating switch connections - Laser lettering possible - Vandal resistant- Wires (8 wires for Multicolor, 4 wires otherwise)²Unique Selling Proposition- Variable supply voltage - Constant LED intensity- Inputs protected against overvoltage - Galvanic separated outputsCharacteristics- Housing made from stainless steel- Various illumination colors and color combinations possible- Touch surface made from scratch-resistant ceramics with area illumi-nation or made from stainless steel with ring illumination - Ring or area illumination - Wearless, no moving parts- Attractive design with or without finger guide availableWeblinkshtml datasheet , General Product Information , CAD-Drawings , Product News , Detailed request for product , MicrositeImportant information- The CPS is not suitable for use in sanitary or other applications exposed to water or other liquids. - The housing is connected to gnd.T echnical DataElectrical Data Switching Function momentary (NO¹) or latching Switching Voltage max. 42 VAC␣/ 60 VDC Switching Current max. 100 mA Electrical Rating1 WSwitch Resistance OFF > 10 M ΩSwitch Resistance ON < 16 ΩSupply Voltage5 - 28 VDCCurrent Consumption all LEDs off2.5 mA (switch is open)8.5 mA (switch is closed)Current Consumption 1 LED on8.0 mA (switch is open)14.0 mA (switch is closed)Current Consumption 2 LED on14.0 mA (switch is open)20.0 mA (switch is closed)Current Consumption 3 LED on19.0 mA (switch is open)25.0 mA (switch is closed)Reverse Polarity Protection yes Short Circuit Protection yesOutput Type OptoMOS Relay Lifetime5 million actuationsconnection typeWires (8 wires for Multicolor, 4 wires otherwise)²Mechanical Data Actuation Type capacitive Actuating Force none Shock Protection IK 09Mounting Depthwith Finger Guide: 30.3 mm without Finger Guide: 30 mm Tightening Torque Plastic Nut 2.5 NmClimatical DataOperating Temperature -40 to 60 °C Storage Temperature-40 to 85 °CIP Protection Class Front Side IP67 acc. to IEC 60529Salt Spray Test (acc. to DIN 50021-SS)24 h / 48 h / 96 h Residence TimeMaterial Housings Stainless SteelActuatorArea Illumination: CeramicsRing Illumination: Stainless steel Illuminated Ring (Ring Illumi-nation)PMMA Seal RingNBR70¹ on request also available as NC / ² on request also available with cable or connectorApprovals and CompliancesDetailed information on product approvals, code requirements, usage instructions and detailed test conditions can be looked up in Details about ApprovalsSCHURTER products are designed for use in industrial environments. They have approvals from independent testing bodies according to national and international standards. Products with specific characteristics and requirements such as required in the automotive sector according to IATF 16949, medical technology according to ISO 13485 or in the aerospace industry can be offered exclusively with customer-specific, individual agree-ments by SCHURTER.Application standardsApplication standards where the product can be usedOrganization Design StandardDescriptionDesigned for applications acc.IEC/UL 60950IEC 60950-1 includes the basic requirements for the safety of informationtechnology equipment.CompliancesThe product complies with following Guide LinesIdentification Details InitiatorDescriptionRoHS SCHURTER AGDirective RoHS 2011/65/EU, Amendment (EU) 2015/836REACH SCHURTER AG On 1 June 2007, Regulation (EC) No 1907/2006 on the Registration,Evaluation, Authorization and Restriction of Chemicals 1 (abbreviated as"REACH") entered into force.Dimension [mm]CPS with ring illuminating, with finger guideCPS with ring illuminating, no finger guide23CPS with area illuminating, with finger guideCPS with area illuminating, no finger guideA= illuminating areaB= CPS16: 19.5 mm C= CPS16: M16x1 D= CPS16: 14.7 mm E= CPS16: ø20 mm CPS19: 23.0 mm CPS19: M19x0.75 CPS19: 14.5 mm CPS19: ø24 mm CPS22: 25.5 mm CPS22: M22x1 CPS22: 14.5 mm CPS22: ø27.6 mm4Connection wire assignmentConnection wire assignmentfunction functionVin = 5 VDC...28 VDCVin = 5 VDC...28 VDCGND GND OUT1OUT1OUT2OUT2GNDLED red GND = ON Open* = OFF LED green GND = ON Open* = OFF LED blue GND = ON Open* = OFFWire 1Wire 1brown brown black black white white white white red green blue blackWire 3Wire 3Wire 4Wire 4Wire 5Wire 6Wire 8Wire 7Wire 2Wire 2Wire-numberWire-numberWire colorWire colorFor all other configurationsFor multicolor configurations* internal pull-up resistor to vcc = 3.3 VDimension+0.1CPS16+0.1CPS19CPS22Diagramsexample for system controlled colorsIllumination options for RGB5074 =075 =076 =077 = 6Configuration code for configuring customized variants (example)16 = 16 mm 19 = 19 mm 22 = 22 mm 0RW = Red/White0GR = Green/Red0GB = Green/Blue0GC = Green/Cyan0GM = Green/Magenta 0GY = Green/Yellow0GW = Green/White0BR = Blue/Red0BG = Blue/Green0BC = Blue/Cyan0BM = Blue/Magenta 0BY = Blue/Yellow0BW = Blue/White0CR = Cyan/Red0CG = Cyan/Green0CB = Cyan/Blue0CM = Cyan/Magenta 0CE = Cyan/Yellow0CW = Cyan/White0MR = Magenta/Red 0MG = Magenta/Green 0MB = Magenta/Blue 0MC = Magenta/Cyan 0MY = Magenta/Yellow 0MW = Magenta/White 0YR = Yellow/Red0YG = Yellow/Green0YB = Yellow/Blue0YC = Yellow/Cyan0YM = Yellow/Magenta 0YW = Yellow/White0WR = White/Red0WG = White/Green0WB = White/Blue0WC = White/Cyan0WM = White/Magenta 0WY = White/YellowFor customized variants a minimum order quantity of 100 pieces has to be fulfi lled.7All VariantsPackaging unit 10 STThe specifications, descriptions and illustrations indicated in this document are based on current information. All content is subject to modifications and amendments. Information furnished is believed 3 0 . 0 5 . 2 0 1 98。
Kuebler Codix 52U 电源驱动双功能计数器说明书

The Codix 52U is a voltage-powered dual function counter with 4 functions in one device:Counter with 2 totalizing ranges, totalizer and timer, totalizer and frequency meter, timer with 2 time ranges.F or fast and slow count pulses, with 6-digit LED display for NPN, PNP input signals.Order codea Input switching level0 = S tandard (HTL) 1) A = 4 ... 30 V DC1) Stock types6.52U .01.3X 20aDelivery specification · Counter· Mounting clip· Front bezel for screw mounting (T008181) 56 x 40 mm [2.20 x 1.57“], panel cut-out 50 x 25 mm [1.97 x 0.98“]· Front bezel for clip mounting (T008180) 53 x 28 mm [2.09 x 1.10“], panel cut-out 50 x 25 mm [1.97 x 0.98“]· Gasket· Instruction manual, multilingualM u l t i f u n c t i o nd e v i c e sTechnical data1) Details see manualSuitable gaskets, other accessories and installation examples for optional accessories can be found in chapter accessories or in the accessories section under: /accessories.12345Block diagramTerminal assignmentFunction of the inputs INP A, INP BCounter with 2 totalizing ranges:INP A: Dynamic count input counter 1 and counter 2INP B: InactiveTotalizer and timer::INP A: Dynamic count input for totalizerINP B: Start/Stop or gate input for timer Totalizer and frequency meter:INP A: Dynamic count input/frequency inputINP B: InactiveTimer with 2 time ranges:INP A: Start input (depends on input type)INP B: Start/Stop or gate input for timer (depends on input type)Power supply:10...30 V DC μ processorDisplayA BKeypad52U.012Count input Reset inputPIN DC version 1 10 ... 30 V DC 2 0 V GND 3 INP A 4 INP B 5ResetApplications for dual functions• Pulse and frequency (speed) e .g. production data acquisition: total piece count and speed on OEM equipment, flow rate measuring systems – total flow and current flow • 2 pulse counters M easurement of batch and total piece count or of daily production count and total count values • Pulse and time (maintenance counter)Used in the lift industry as trip counters and hours-run meters and on production machines for piece and time counting, flow and time measurement, materials handling time and quantities • 2 timers M easurement of total time and orderspecific times, maintenance intervals and total time, time of day and total timePiece count on conveyor and production speedTrip counter and hours-runFlow rate and totalvolume48 [1.89]59 [2.323]6.5 [0.256]max. 19.3 [0.76]4 [0.158]24 [0.945]22 x 45[0.866 x 1.772]45+0,6[1.772+0.024]22.2+0,3[0.874+0.012]56 [2.205]1 [0.039]14 [0.158]40 [1.575]32 [1.26]25 x 50[0.984 x 1.969]25+0.5[0.984+0.02]25+0.550+0.6 [1.969+0.024]M325+0.5[0.984+0.02]32±0.1[1.26±0.004]50+0.6 [1.969+0.024]53 [2.087][1.103]28[0.984 x 1.969]25 x 501 [0.039]4 [0.158]25+0.5M u l t i f u n c t i o n d e v i c e sFront bezel for clip mounting (included in delivery)Front bezel for screw mounting (included in delivery)DimensionsDimensions in mm [inch]Panel-cut-outPanel-cut-outPanel-cut-out1 C ountersinking Af3, DIN 74。
acc公式
acc公式
Accuracy(准确性)是一种测量分类模型性能的重要指标,主要用于衡量模型的准确性。
用公式可以定义为:
acc = (TP + TN) / (TP + FP + FN + TN)
其中,TP(True Positive)是正确分类为正样本的样本数,TN(True Negative)是正确分类为负样本的样本数,FP(False Positive)是错误分类为正样本的样本数,FN (False Negative)是错误分类为负样本的样本数。
它的取值范围从0到1,即0%(最低)~ 100%(最高)。
当它的数值越接近1,则表示模型的准确性也就越高。
acc一般在机器学习的分类任务中使用,用于快速判断模型的准确率,从而快速确定使用哪种机器学习技术来构建模型,以及哪种调参手段来提高模型准确性。
例如,当准备使用支持向量机(SVM)构建模型时,可以使用acc来评估模型在数据集上准确率。
如果acc值较低,则可能表明SVM不是一个比较好的选择,可以换其他机器学习技术进行尝试。
此外,也可以调整SVM的参数,以提高acc值。
Acc的重要性不言而喻,在训练模型上也有较大的帮助。
换句话说,acc公式可以帮助我们从多种模型中选择最好的一种,并调整参数,使模型在不同数据集上性能最佳。
后勤自动过帐(OBYC)详细配置
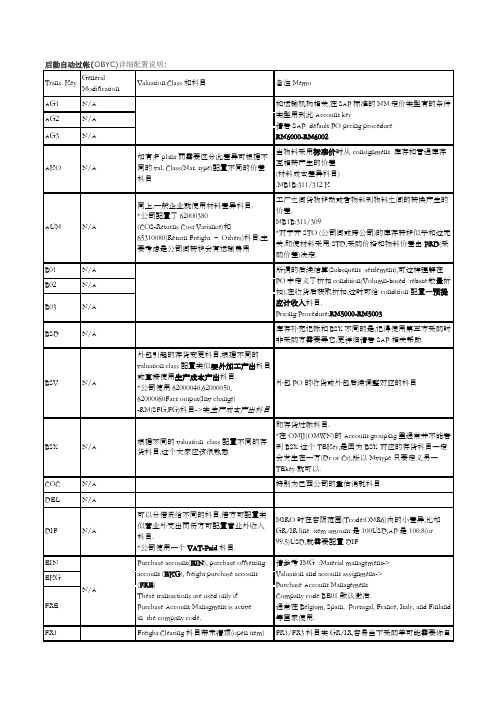
FR2
Return Freignt/Freight Provision科目,不带未清项管理. P&L科目
*公司配置65310080(Return
Freight)
FR3
海关相关费用科目,同FR1
如果愿意你可轻易更改成你所需用的Account modification.
请使用SE16:V_T163K
VKP
VNG
报废/毁损科目,可只使用一个报废费用科目,没必要一定要根据val. Class细分,视管理需求设置
*公司使用了62000140/62000150/
62000160->Quality Scrap RM/
自定义的一般修改,
主要确定新准则下的科目是否和物料自动过帐相关.
TMD/TND
这个一般企业不用
KBS
SAP介绍说它是用来在收货时决定PK码不能设置科目(81/91).
*实际上这trans. Key的acct.deter.是没勾上的.
KDG
KDM
汇兑损益科目,有的企业设置已实现和未实现汇兑损益
*公司专门配置了MM-Exchange Rate Gain/ Loss
*公司配置14050060(Custom
Clearing,BS)
FR4
海关费用预提同FR2
*公司配置65310090(Return
Custom)
FRL
可根据外包料的valuation class设置外包费用-SFG(FG)科目.
*公司设置62000260/62000261
Pure Sub-Contracting
05_Document_Online_Split

SAP AG 2004 / 13
Splitting Rule – Item Category to be Edited
SAP AG 2004 / 14
Work Steps for Splitting Documents (within the program)
Example: Payment with residual items without invoice reference
Attention: Residual items with invoice reference are split passively
SAP AG 2004 / 17
Creating Zero Balance
Account Amount Acc. Assignm./ Item Category Partn.-Acc. Assignm.
SAP AG 2004 / 16
900 -400 -600 100
2
Clearing line! Passive Split Determined from original invoice document. Not customizable!!!
Active Split
Account
Amount
Entry View
Vendor Invoice PK Account
Enhancement
Document number 4711
40 40 31 31
Totals table
Balances
Actual line items
Posting
Split info table
FAGL_SPLITINFO FAGL_SPLITINFO_VAL
Absolute multiturn encoder M36 M58 说明书

Analog (U/I) Manual Absolute multiturn encoderM36M58Manual - analog (U/I) M36M58Manual - analog (U/I)M36 M58l i Table of contents1.Technical details and encoder characteristics (4)1.1 Mechanical values ...................................................................................................................................................................................41.2 Working temperature range ...................................................................................................................................................................41.3 Supply voltage and current consumption ............................................................................................................................................41.4 Load at the output / max. output current ..............................................................................................................................................41.5 Hardware characteristics .......................................................................................................................................................................41.6 Supported standards and functions ......................................................................................................................................................51.7 Optional functions ....................................................................................................................................................................................52.Electrical installation .. (6)2.1 Electrical installation ...............................................................................................................................................................................62.2 Terminal assignment ...............................................................................................................................................................................63.Function and status LED (7)3.1 LED combinations during operation ......................................................................................................................................................73.2 LED combinations for scaling .................................................................................................................................................................84.Standard function (8)4.1 Scaling function (optional) ......................................................................................................................................................................94.2 Reference point display ........................................................................................................................................................................104.3 Resetting the scaled output signal ......................................................................................................................................................104.4 Scaling with direction of rotation change ..........................................................................................................................................104.5 Limit switch function (optional) ............................................................................................................................................................115.Abbreviations used . (11)Manual - analog (U/I)M36M581.Technical details and encoder characteristics1.1 Mechanical valuesM36Shock resistance acc. to EN 60068-2-27 2500 m/s2, 6 msVibration resistance acc. to EN 60068-2-6 300m/s2, 10 … 2000 HzM58Shock resistance acc. to EN 60068-2-27 5000 m/s2, 6 msVibration resistance acc. to EN 60068-2-6 300m/s2, 10 … 2000 Hz1.2 Working temperature range-40…+85°C1.3 Supply voltage and current consumptionOutput: 4 … 20mA: 10 … 30 VDC max. 30.0 mA0 … 10V: 15 … 30 VDC max. 30.0 mA0 … 5V: 10 … 30 VDC max. 30.0 mA1.4 Load at the output / max. output currentOutput: 4 … 20mA: at 10 VDC max. 200 Ohmat 24 VDC max. 900 Ohmat 30 VDC max. 1200 Ohm0 … 10V / 0 … 5V: min. 1kOhm load resistance / max. output current: 10mA1.5 Hardware characteristicsSingleturn technology Magnetic 2 axes Hall sensor Resolution (DA converter)12 bitsSingleturn accuracy (at 25 °C)+/-1.00°Temperature coefficient< 100 ppm/K Repeatability (at 25 °C)+/-0.2°Update rate 1 msPower ON time< 1 sec.Settling time< 1 msMultiturn technology Magnetic revolution counter Multiturn resolution Maximum 65536 revolutions Multiturn range (default)16 revolutionsDirection of rotation (default)CWSmallest measuring range22.5°Function display and diagnostics by means of LEDs.Manual - analog (U/I)M36 M58l i 1.6 Supported standards and functionsM36-xxx-420A-xx / M58-xxx-420A-x:Output: 4 … 20mA Resolution: 12 bitsMax. measuring range: 65536 revolutions Min. measuring range: 22.5°Zero point display: 0 … 1°M36-xxx-10V-xx / M58-xxx-10V-x:Output: 0 … 10 VDC Resolution: 12 BitMax. measuring range: 65536 revolutions Min. measuring range: 22,5°Zero point display: 0 … 1°M36-xxx-5V-xx / M58-xxx-5V-x:Output: 0 … 5 VDC Resolution: 11 bitsMax. measuring range: 65536 revolutions Min. measuring range: 22.5°Zero point display: 0 … 1°1.7 Optional functions•Measuring range scaling via scaling inputs (max. 10,000 cycles)•Limit switch function•Direction of rotation: CCW (is factory-set and cannot be modified by the user.)Manual - analog (U/I)M36 M582.Electrical installationElectrical installation requires connectors or connection cables (see absolute M36 / M58 data sheet).2.2 Terminal assignmentTop view of mating side, male contact base+V: Encoder supply voltage +V DC +U: Voltage SET 1: Set input for teach point 10 V: Encoder ground GND (0 V)+I: CurrentSET 2: Set input for teach point 21)For scalable variantsMake sure that the shield of the encoder is properly connected to the shield of your plant.If possible, mount all cables with traction relief.Check the maximum supply voltage on the device.Manual - analog (U/I)M36 M58e n g l i s h3.Function and status LEDThe device is equipped with a two-color (green / red) LEDdisplaying status and errors.3.1 LED combinations during operationManual - analog (U/I)M36 M583.2 LED combinations for scaling4.Standard functionAs a standard, the corresponding desired output signal ( 4 … 20m A / 0 … 10 V /0 … 5 V) is linearily factory-scaled over 16 revo-lutions and supplied in the CW or CCW direction of rotation according to customer requirement.The reference point is indicated by the LED from 0 … 1°.cw variantccw variantReference display (LED)20 mA / 10 V5 V4 mA0 mA / 0 V20 mA / 10 V5 V4 mA 0 mA / 0 VReference display (LED)Manual - analog (U/I)M36 M58l i 4.1 Scaling function (optional)The encoder is factory-set to a measuring range of 16 revolutions over which the corresponding output signal is scaled linearily.Two scaling inputs (set 1, set 2 - see chapter Terminal assignment) allow the user to define himself a desired measuring range. The desired measuring range must be > 22.5° and shall not exceed 65536 revolutions.The factory-set output range of 4 … 20mA / 0…10V / 0…5V is scaled linearily over the desired measuring range.To trigger the scaling operation, the corresponding scaling input must be connected with the supply voltage + V for at least 1 second.Scaling process:1.Turn the shaft to the desired start position.2.Connect scaling input 1 with + V for at least 1 second.3.Green LED flashes 1x.4.Turn the shaft to the desired end position.5.Connect scaling input 2 with + V for at least 1 second.6.Green LED flashes 3x. The new measuring range is active.(The output signal assumes the highest state)*0-GND, 1-mind. 1 sec. + VScalable variant without limit switch functionManual - analog (U/I)M36M584.2 Reference point displayWith the factory-set …default“ scaling, the LED displays the reference point of 0..1°. The reference point display is no longer available if another measuring range is scaled using the scaling inputs.The scaling function is limited to 10,000 cycles. Beyond this limit, the error-free scaling of the output signal cannot be guaranteed any more.Actuate the scaling inputs only once the shaft has stopped.. Only this way will it be possible to take over the desired start and end position of the desired signal scaling.4.3 Resetting the scaled output signal1.Connect scaling inputs 1+2 with + V for at least 1 second.2.T he LED sequence green / red / green is displayed. The factory-set scaling of the output signal is available again and is set to the central value of the measuring range at the current position.4.4 Scaling with direction of rotation changeFixed output levels are assigned to the scaling inputs.Scaling input 1 = lowest output level (current variant = 4 mA / voltage variant = 0 V)Scaling input 2 = highest output level (current variant = 20 mA / voltage variant = 5 or 10 V)If scaling input 2 is actuated first, followed by input 1, the new measuring range is defined with the reversed direction of rotation.Manual - analog (U/I)M36 M58l i 4.5 Limit switch function (optional)With the limit switch function, the output signal does not remain at the last final value, but it makes a defined jump. This signal jump can be used by a control as a limit switch. The output levels of the limit switches are factory-set.Scalable variant with limit switch function5.Abbreviations usedCW Direction of rotation: clockwise looking at the W Direction of rotation: counterclockwise looking at the shaft.MT Revolution counter.ST Angle information within a revolution.Limit switch function version limit switch low limit switch high 0 ... 10 V 0 ... 5 V 4 ... 20 mA0,25 V 0,25 V 3,6 mA9,75 V 4,75 V 22,0 mAFactory-set measuring range 24 revolutions with roll-over。
西门子SIMATIC直接启动电机 starer数据手册说明书

product brand name product category product designation product type designation General technical data trip class equipment variant acc. to IEC 60947-4-2 product function
SIMATIC Motor starter Direct-on-line starter ET 200SP
CLASS OFF / 5 / 10 adjustable 3 Direct-on-line starter Yes Yes Yes Yes
0.2 W 500 Vห้องสมุดไป่ตู้2 III 6 kV
500 V 6g / 11 ms 15 mm to 6 Hz; 2g to 500 Hz 1 1/s 30 000 000
● on-site operation ● intrinsic device protection ● remote firmware update ● for power supply reverse polarity protection power loss [W] for rated value of the current ● at AC in hot operating state per pole insulation voltage rated value degree of pollution overvoltage category surge voltage resistance rated value maximum permissible voltage for safe isolation ● between main and auxiliary circuit shock resistance vibration resistance operating frequency maximum mechanical service life (switching cycles) of the main contacts typical type of assignment utilization category ● acc. to IEC 60947-4-2 ● acc. to IEC 60947-4-3 reference code acc. to IEC 81346-2 Substance Prohibitance (Date) product function ● direct start ● reverse starting product component motor brake output product function short circuit protection design of short-circuit protection breaking capacity maximum short-circuit current (Icu) ● at 400 V rated value ● at 500 V rated value
《数据、模型与决策》第6节:运输、转运与指派问题
第6章运输、转运与指派问题第6章运输、转运与指派问题6.1 运输问题6.1.1 运输模型6.1.2 QM for Windows求解6.2 转运问题6.2.1 转运模型6.3 指派问题6.3.1 指派模型6.3.2 QM for Windows求解6.3.3 课本后的练习题本章节主要介绍三种特殊的线性规划模型——运输问题、转运问题和指派问题,这些问题都属于一大类线性规划问题,即网络流问题。
由于这些问题是线性规划的常见应用之一,所以我们专门用一章来研究这些问题。
6.1 运输问题在社会经济生活中,经常会碰到大宗物资的调运问题。
如煤,钢铁、木材、粮食等,在全国有若干生产基地,根据已有的交通网络,制定调运方案,将这些物资运到各个消费地点,这样调运的目的,不仅是要把这些物资供给各地消费,而且我们也希望调运的费用最省,这类问题就是所谓的运输问题。
6.1.1 运输模型运输模型适用于具有如下特征的一类问题:1. 一种产品以尽可能低的成本从多个产地运输到多个目的地2. 每一产地可以供应固定数量的产品,并且每一目的地有固定的的产品需求量例1:小麦种植于中西部,储存于位于以下3个不同城市的谷物仓库:堪萨斯,奥马哈,和得梅因。
这3个谷物仓库供应3个分别位于芝加哥、圣路易斯、和辛辛那提的面粉厂。
采用火车将谷物运输至面粉厂,每一火车车皮最多可装载1吨小麦。
每个谷物仓库每月向面粉厂供应小麦的最大量如下表所示:谷物仓库供应量(吨)1.堪萨斯1502.奥马哈1753.得梅因275总计600每个面粉厂每月的小麦需求量如下表所示:较大的一方取不到等号,如需求量较大,则需求不一定都被满足;供给较大,则不一定都供给完。
对于含限制性通行的情况,即该路径不含通过量(不定义该参数 or 大M法)6.1.2 QM for Windows求解选中“Transportation”模块,设置流量来源和目的地;输入供给量和需求量,以及供给点和需求点之间的运输成本;6.2 转运问题转运问题是运输模型的扩展形式,它包含了产地和目的地之间的之间转运节点。
Parker Hannifin VS111.PMD CM Catalogue 电源增益器系列 VS1

shipped factory set.
8
Proportional pressure valve
The version Code 0 needs to be set to the connected valve's characteristics.
Note: Please order control connector separately (order number HR 2150 2072).
IP65, plugged and mounted
-20...60
6pole + PE, DIN 43 651 2pole + PE, EN 175301-803
Note: If high-resistance solenoids with nominal current of < 0.8A are used, the supply voltage has to be raised to 30VDC.
EN 50081-2 EN 50082-2 EN 61000-4-3
EN 55011 EN 61000-4-2 EN 61000-4-5
EN 61000-4-4
Circuit diagram
10
VS111.PMD CM
10-28
Parker Hannifin GmbH & Co. KG Hydraulic Controls Division Kaarst, Germany
Catalogue HY11-2500/UK
Characteristics / Ordering Code
Plug-In Amplifier Series VS111
General Design
LTE指令操作图文详解

一、LTE OSS的使用1.1 退出OSS退出登陆后要选择,Launch-Out-xxxx,直接退出的话该进程并未关闭,仍然会占用OSS系统内存。
1.2查看告警双击显示告警详细信息:1.3查看全网整体告警1.4 查看LTE基站基本配置1.5选择LTE网络在ONRM_ROOT_MO_R下面查看的地区网元1.6查看基站状态及相关部分信息在右侧的STATUS菜单下可以分别查看基站状态及相关部分的信息,如基站IP地址、ID,及告警级别和数量等信息。
可以查看小区(EUTRAN cell)当前状态如是否运行(operational)、激活(Enabled)及解锁(Unlocked)等以及部分参数如TAC,PLMN等。
在查看状态时可以在左侧的Filter界面下选择过滤条件,如只显示locked(锁)和disabled (未激活)小区,则在status中会只列出相关状态的小区。
取消Filter时可点击Reset Filter 按钮。
1.7闭锁小区小区闭锁基站闭锁二、查询指令操作lt:指令是最常用的指令,进入moshell之后,首先用lt从库中取mo,要不然你就看不到东西。
通过在lt后面配置不同的过滤器可以有选择的装载mo,例如lt all是全部mo, lt m3ua只取包含(模糊查找)M3ua的mo。
当MO发生变化,例如删除,添加,修改参数。
需要lt root更新一下,再用lt all等取mo。
Pr:print mgw中定义了的mo,例如pr" pluginunit可以显示MGW中有定义的单板。
Get:想知道该MO的具体参数设置,用get" <proxy>获得,其中proxy由pr结果获得。
St:查看mo的工作(op)状态和管理(adm)状态bl"&deb :对MO进行lock和unlock的操作。
这两个指令只能对MO的管理状态进行修改。
割接前闭塞不用的传输,以免出告警时有效。
变频器相关参数调试及基本原理变频器常用术语中英文对照

变频器基本参数的调试变频器功能参数很多,一般都有数十甚至上百个参数供用户选择。
实际应用中,没必要对每一参数都进行设置和调试,多数只要采用出厂设定值即可。
但有些参数由于和实际使用情况有很大关系,且有的还相互关联,因此要根据实际进行设定和调试。
因各类型变频器功能有差异,而相同功能参数的名称也不一致,为叙述方便,本文以富士变频器基本参数名称为例。
由于基本参数是各类型变频器几乎都有的,完全可以做到触类旁通。
一加减速时间加速时间就是输出频率从0上升到最大频率所需时间,减速时间是指从最大频率下降到0所需时间。
通常用频率设定信号上升、下降来确定加减速时间。
在电动机加速时须限制频率设定的上升率以防止过电流,减速时则限制下降率以防止过电压。
加速时间设定要求:将加速电流限制在变频器过电流容量以下,不使过流失速而引起变频器跳闸;减速时间设定要点是:防止平滑电路电压过大,不使再生过压失速而使变频器跳闸。
加减速时间可根据负载计算出来,但在调试中常采取按负载和经验先设定较长加减速时间,通过起、停电动机观察有无过电流、过电压报警;然后将加减速设定时间逐渐缩短,以运转中不发生报警为原则,重复操作几次,便可确定出最佳加减速时间。
二转矩提升又叫转矩补偿,是为补偿因电动机定子绕组电阻所引起的低速时转矩降低,而把低频率范围f/V增大的方法。
设定为自动时,可使加速时的电压自动提升以补偿起动转矩,使电动机加速顺利进行。
如采用手动补偿时,根据负载特性,尤其是负载的起动特性,通过试验可选出较佳曲线。
对于变转矩负载,如选择不当会出现低速时的输出电压过高,而浪费电能的现象,甚至还会出现电动机带负载起动时电流大,而转速上不去的现象。
三电子热过载保护本功能为保护电动机过热而设置,它是变频器内CPU根据运转电流值和频率计算出电动机的温升,从而进行过热保护。
本功能只适用于“一拖一”场合,而在“一拖多”时,则应在各台电动机上加装热继电器。
电子热保护设定值(%)=[电动机额定电流(A)/变频器额定输出电流(A)]×100%。
SAP物料自动记账科目设置总结

SAP物料⾃动记账科⽬设置总结总体说明SAP系统对于出库和⼊库都是采⽤移动类型进⾏管理,通过移动类型关联到Account Determine,然后确定对应的记账科⽬。
所有的移动类型对应的库存记账科⽬都是通过BSX进⾏设置。
对于其他⼊库和其他出库,sap系统允许操作者⼿⼯指定对⽅科⽬,这样有很⼤的灵活度,如果企业出于管理规范的要求,可以考虑⾃⼰新增移动类型。
Trans. Key GeneralModification Valuation Class和科⽬备注MemoAG1 和运输机构相关,⼀般似乎企业少⽤,请看SAP default PO prcing procedure RM6000-RM6002AG2AG3AKO N/A 如有多plant⽽需要区分此差异可根据不同的val. Class(Mat. type)配置不同的价差科⽬当物料采⽤标准价时从consignment 库存和普通库存互相转产⽣的价差.MB1B:311/312 KAUM N/A 同上,⼀般就使⽤材料差异科⽬.*在跨公司库存转移时可能会加上运输费等,可给某类valuation class配置类似其它运输费科⽬⼯⼚之间货物移动或者物料到物料之间的转换产⽣的价差.MB1B:311/309*对于开STO (公司间或跨公司)的库存转移似乎和这⽆关.即使材料采⽤STD,采购价格和物料价差由PRD(采购价差)决定.B01 所谓的后续结算(Subsquent settlement),可这样理解在PO中定义了折扣condition(Volumn-based rebate数量折扣),在收货后获取折扣,这时可给condition配置⼀预提应计收⼊科⽬.Pricing Procedure:RM5000-RM5003B02B03BSD 存货记帐和BSX不同的是,记得使⽤第三⽅采购时⾮采购⽅需要弄它..属于库存的补充记帐科⽬,在物料分类账关帐操作时过账,应摊⼊库存的差异⾦额将计⼊该科⽬。
moshell控站-爱立信lte网管操作文档
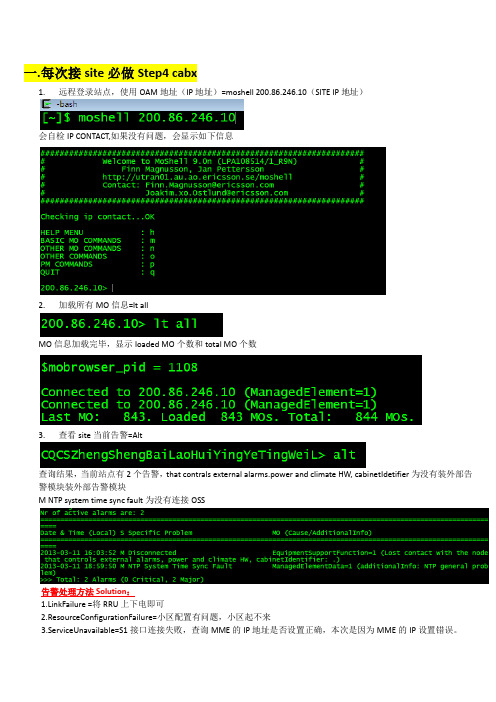
一.每次接site必做Step4 cabx1.远程登录站点,使用OAM地址(IP地址)=moshell 200.86.246.10(SITE IP地址)会自检IP CONTACT,如果没有问题,会显示如下信息2.加载所有MO信息=lt allMO信息加载完毕,显示loaded MO个数和total MO个数3.查看site当前告警=Alt查询结果,当前站点有2个告警,that contrals external alarms.power and climate HW, cabinetIdetifier为没有装外部告警模块装外部告警模块M NTP system time sync fault为没有连接OSS告警处理方法Solution:1.LinkFailure =将RRU上下电即可2.ResourceConfigurationFailure=小区配置有问题,小区起不来3.ServiceUnavailable=S1接口连接失败,查询MME的IP地址是否设置正确,本次是因为MME的IP设置错误。
4.查看cell状态=st cell查看RRU,SECTOR命令都类似:ST RRU/ST SECTOR该site有1个cell,第一条为cell对应硬件地址和配置第二条显示cellid=CQL_40004_1,PROXT=813,状态为unlocked和enabled二.优化常用修改参数命令:1.找power对应参数=GET . POWER会输出很多参数,我们只关心如下Cell max transmissionpower=430dBmPartofsectorpower=100;CQL40004_1该小区分到了sector功率为100% confOutputpower=20; CQL40004_1小区输出功率为20wsectorpower=20;CQL40004_1对应sector输出功率为20W我们修改功率,只修改confOutputpower2.修改cell功率2.1修改cell功率前,必须先毙掉cell,sector毙掉cell=bl cell,选择“Y”毙掉cell=bl sector,选择“Y”2.2 修改cell confoutputpower功率=set SectorEquipmentFunction=1 confOutputPower 20 SectorEquipmentFunction=1;修改对应MOconfOutputPower 20;修改cell功率为20W输入后,Moshell会询问是否修改confOutputPower,选择”Y”修改cellpartOfSectorPower功率为90%=setEUtranCellTDD=CQL40004_1partOfSectorPower902.3修改cell功率后,再解放cell,sector解放cell=deb cell解放sector=deb sector备注:解放sector速度会比较慢,请等待3.查看频点=get . earfcn目前site频点为390504.修改频点4.1毙掉cell=bl cell4.2 查看对应MO可执行的命令=acl EUtranCellTDD=CQL40004_1EUtranCellTDD=CQL40004_1下可执行操作为changeFrequency4.3修改CQL40004_1频点=acc EUtranCellTDD=CQL40004_1 changeFrequency; moshell问是否执行,选“Y”备注:修改频点等大操作,命令为ACC,普通修改为Set输入修改频点值391504.4解放小区=deb cell5.修改QRX接入门限5.1 查询QRX对应参数=GET . QRX(每个操作都应该毙解cell,以后的笔记中省略该步骤)查询结果,qRxLevMin和qRxLevMinOffset可修改5.2修改qRxLevMin为-140(默认值)6.查询不清楚参数的含义=mom . pZeroNominalPucch; 查询pZeroNominalPucch参数含义pZeroNominalPucch参数的含义,range范围,默认值7.修改上行信道功率7.1 获取PZERO对应可执行操作, 上行控制和共享信道功率PZERO可执行的修改的参数为pZeroNominalPucch,pZeroNominalPusch,上行控制和共享信道功率7.2 修改上行控制信道功率= set EUtranCellTDD=CQL40004_1 pZeroNominalPucch -117把EUtranCellTDD=CQL40004_1的Pucch功率改为-1177.3修改上行共享信道功率= set EUtranCellTDD=CQL40004_1 pZeroNominalPusch -117把EUtranCellTDD=CQL40004_1的Pusch功率改为-1178.修改CFI8.1获取CFI对应可执行操作=GET . CFI8.2 CFI参数含义,默认CFI=0为自适应带宽的格式,CFI=1对应2个control symbol8.3 修改CFI=5;为根据UE个数自适应改变control symbol个数的模式=set EUtranCellTDD=CQL40004_1 pdcchCfiMode 59.修改传输模式9.1获取transmissionMode对应可执行操作=get . transmissionMode当前传输模式为3transmissionMode的解释9.2修改为常用传输模式2,3,7,810.修改PCI信息10.1 获取PCI信息=get . cellidPCI 2个参数,CELLIDGROUP=166和CELLID=0; PCI=166*3+0=49810.2修改CELLIDGROUP=16711.修改时隙配比11.1查看时隙配比=get . subframe该站点特殊子帧pattern=7,时隙子帧配比=2(默认3:1)subframeAssignment=1(2:2);subframeAssignment=2(3:1)11.2修改时隙配比为1(2:2)=set1 NTLE6A854 subframeAssignment 2(微站使用SET命令,宏站使用SET1,且只能对整个site不能对单个cell修改)12.查看底噪12.1定义了IntferenceScanner统计,pmRadioRecInterferencePwr这个测量值12.2激活定义好的测量scanner状态=pdeb IntferenceScanner激活后,IntferenceScanner为active状态12.3查看定义的统计=PST, IntferenceScanner为active状态12.4查看site实际底噪= pget . pmRadioRecInterferencePwr$pmRadioRecInterferencePw i[16]为底噪打点分布区间,本站多分布在【3】12.5查询pmRadioRecInterferencePwr参数含义= pmom . pmRadioRecInterferencePwr$16个区间对应的N+I分布值,【3】区间为-119~-118;一般N+I在=-106以上才有问题,不正常【11】正确情况,底噪应该多分布在【0】~【4】附录:可直接copy以下命令到moshell,进行底噪测试pcr IntferenceScanner EUtranCellTDD pmRadioRecInterferencePwrpdeb IntferenceScannerpstpget . pmRadioRecInterferencePwr$pmom . pmRadioRecInterferencePwr$13.添加系统常量13.1 找到管理系统常量的MO=PR SYSYEM; 此处为790 ENodeBFunction=1,SystemConstants=113.2查看该MO,ENodeBFunction=1,SystemConstants=1底下,可执行的操作;添加(Write)/删除(Reset)13.3增加一个系统常量= acc ENodeBFunction=1,SystemConstants=1 writeSystConst13.4 给新的系统常量赋值,name=220,value=15013.5 查看新的系统常量是否写正确=get ENodeBFunction=1,SystemConstants=1这里name=220,value=150的新系统常量已经写入实际用例:解决创意终端解调问题,增加该系统常量前,创意终端速率有毛刺,不平稳,增加该系统常量,速率平稳14.删除系统常量14.1 pr system14.2 acl ENodeBFunction=1,SystemConstants=114.3 acc SystemConstants=1 reset SystConstMoshell会提示删除的系统常量名,这里name=22015.查看历史告警查看历史告警=lga输入密码=rbslga -s 20130401 //查询历史操作,例如本指令是查20130401之后的操作查看链接失败的告警= lga | grep LinkFailure16.查看历史操作查看历史操作=lgolgo -s 20130411 //查询历史操作,例如本指令是查20130411之后的操作17.创建CV,备份; 基站配置倒回17.1查看以前的CV =CVLS查询到以前的一个CV范例17.2创建CV=CVMS 20130416(CV文件名)17.3倒回一个CV=CVSET 20130416(CV文件名)17.4 倒回CV后,重启基站,则基站会安装该CV配置进行重启和配置=ACC 0 MANUALRESTART17.5删除CV=CVRM 20130416(CV文件名)17.6 确认当前CV=CVLS;是否为需要倒回的CVExecuting: 20130415_before//是需要倒回的CV,CV名20130415_before18.重启基站18.1 查询ManagedElement=1这MO下可执行操作,manualRestart=ACL 018.2 重启基站=ACC0 manualRestart18.3可选择0~3重启方式,0为热启动,只重启软件,2为冷启动,重启软件+硬件;常用0,218.4选择重启原因,一般选3=UNPLANNED_O_AND_M_ISSUE18.5输入具体重启信息,这里为test测试18.6 检查基站重启进度=POLU,如果有文件出错,会停在当前文件备注:POL,也可以检查进度,但它不论出错都会执行完毕18.7检查基站重启进度,如果重启完毕,返回如下检查基站重启进度,如果重启在进行中,返回如下18.8确认当前CV=CVLS;是否为需要倒回的CVExecuting: 20130415_before//是需要倒回的CV,CV名20130415_before19.查看小区下附着的UE数量(UE成功attached在该小区)= UE print -admitted20.查看系统信息(SI)的周期= get . sip //SI单位为frame(10ms)21.从网络结构上来看,查看板子的状态=ST PLUG该站有1个RRU,能看到硬件地址,状态,如用ST RRU,只能看到RRU状态,不能看到地址22.查看硬件状态= cabx宏站为DUL21,微站为DUL20;可看见RRU硬件位置,是否ON,有无FAULT;CELLID, PCI可见23.查看MME状态=ST MME24.查询命令用法=H+命令;范例=H SET1(查询SET1命令用法)SET1用于以下4个MO修改=tac, frameStartOffset, subframeAssignment, specialSubframePattern25.重启RRU25.1找到RRU板子位置=ST PLUG,这里位置为18725.2查看RRU板子上可执行操作=ACL 187(RRU板子位置)25.3重启RRU=ACC 187 RESTARTUNIT(187=RRU板子位置)25.4 查看RRU是否已经通=ST PLUG26.修改加密算法26.1查看加密算法优先级=get . algori26.2修改加密算法=SET SecurityHandling=1 cipheringAlgorithms 027.查看CELL根序列= get . rootseq每个cell都有一个rachRootSequence,SSV报告需要填写28.加载,加扰上行扰码需要加信号发生器;一般为下行加扰/加载28.1 查询是否加扰=GET . AILG加扰feature=false,加扰=false28.2查看site是否创建了AirIfLoadProfile这个MO=PR AirIfLoadProfile范例为已经创建AirIfLoadProfile,如果没创建,则返回为空,需要自己创建AirIfLoadProfile28.3创建MO, AirIfLoadProfile=CR ENodeBFunction=1,AirIfLoadProfile=1检查MO, AirIfLoadProfile是否创建成功=PR AirIfLoadProfile28.4 Set EUtranCellTDD ailgRef ENodeBFunction=1,AirIfLoadProfile=128.5 激活加扰/加载的feature=Set . featureStateAilg 128.6设置DL loadLevel 为70%,根据不同的需要也可以设置为其他的值=Set . dlPrbLoadLevel 7028.7做个CV,名为active_ailg= cvms active_ailg(此步骤可省略)28.8 解放该小区=DEB EUtranCellTDD=CQL40004_128.9 激活加扰=Acc EUtranCellTDD=CQL40004_1 startAilg备注:必须在cell active下修改alig,每次闭小区(bl EUtranCellTDD=XXX)或者站点重启,这个时候小区扰码已经关闭,都要重新执行acc EUtranCellTDD=XXX startAilg 才能再启动其实每次闭小区的时候都给自动去扰码了激活后,ailgActivetrue29.获取SITE FEATRUE功能信息= get . feature会显示site所支持的feature和是否激活30.修改小区inactive timer30.1查询inactivity timer的配置=get . timer30.2修改inactivity timer为最大86400=SET Rcs=1 tInactivityTimer 8640031. PING IP31.1查MME PROXY=acl . ping752为OMM的proxy,760为MME proxy31.2查MME IP地址=get 760(MME PROXY)31.3 PING MME IP=ping 100.86.246.10备注:不能识别大写,只能小写32.查询site到核心网路由32.1查SITE 接口=get . interfaceIPinterface=1为OAM地址,IPinterface=2为业务地址查询IPinterface=1OAM路由=get hernet=1,IpInterface=133.查看8通道天线feature是否激活= get . oct33.1激活8通道天线feature=set Licensing=1,OptionalFeatures=1,OctAntUlPerfPkg=1 featureStateOctAntUlPerfPkg 134.查看2通道天线feature是否激活= get . dualant34.1激活/关闭2通道天线feature= set Licensing=1,OptionalFeatures=1,DualAntDlPerfPkg=1 featureStateDualAntDlPerfPkg 0(1为激活)35.修改TAC35.1查询cell TAC号=GET . TAC35.2修改CELL的TAC=SET 813 TAC 1(CELL PROXY=813,TAC=1)36.修改小区PCI36.1.获取小区PCI信息=get . physic36.1修改cell 的physicalLayerCellIdGroup=setEUtranCellTDD=CQL40004_1 physicalLayerCellIdGroup 165备注:不能直接修改cellid,因为cellid的范围只有0-2,会和同站其他小区冲突,只能先修改physicalLayerCellIdGroup36.2 改physicalLayerCellIdGroup后,再改physicalLayerSubCellId=set EUtranCellTDD=CQL40004_1 physicalLayerSubCellId 1。
u-blox RCB-F9T 差分定时器应用说明说明书

RCB-F9TDifferential timing with u-blox RCB-F9T high accuracy timing boardApplication noteAbstractThis application note describes how to set up differential timing mode using two RCB-F9Ts in amaster-slave configuration.Document informationTitle RCB-F9TSubtitle Differential timing with u-blox RCB-F9T high accuracy timing board Document type Application noteDocument number UBX-20011550Revision and date R02 13-May-2021Disclosure restriction C1-PublicThis document applies to the following products:Product name Type number Firmware version PCN referenceRCB-F9T-0 RCB-F9T-0-01 TIM2.01 N/ARCB-F9T-1 RCB-F9T-1-00 TIM2.12 N/Au-blox or third parties may hold intellectual property rights in the products, names, logos and designs included in this document. Copying, reproduction, modification or disclosure to third parties of this document or any part thereof is only permitted with the express written permission of u-blox.The information contained herein is provided “as is” and u-blox assumes no liability for its use. No warranty, either express or implied, is given, including but not limited to, with respect to the accuracy, correctness, reliability and fitness for a particular purpose of the information. This document may be revised by u-blox at any time without notice. For the most recent documents, visit .Copyright © u-blox AG.ContentsDocument information (2)Contents (3)1Overview (4)2Connections (4)2.1Connecting to a PC (4)2.1.1RCB-F9T pin assignment (5)2.2Antenna (6)3Receiver configuration (7)3.1Master and slave configuration (7)3.2Master location configuration (7)3.2.1Survey-in (7)3.2.2Fixed position (8)3.3Master UART1 configurations (8)3.3.1Verifying the master configuration (9)3.4Slave configuration (10)4Master-to-slave cable connections (11)4.1Verifying slave operation (12)Related documentation (14)Revision history (14)Contact (15)1Overviewu-blox ZED-F9T and RCB-F9T offer a differential timing mode, where correction data is exchanged with other neighboring receivers via a communication network. In differential timing mode, the receiver can operate either as a master reference station, or as a slave station. The master station provides correction data to the surrounding slave stations, which accurately synchronize to the master’s time.This document shows an example setup of the ZED-F9T module differential timing mode using RCB-F9T boards. It illustrates the following scenario:•The master receiver sends RTCM 3.3 correction messages to the slave receiver.•Upon receiving the corrections the slave receiver aligns its time to that of the master.☞Both master and slave must be either an RCB-F9T receiver board or a ZED-F9T receiver. Other receiver modules such as, for example, ZED-F9P, do not work in a differential timing setup.2ConnectionsTo enable differential timing the master and slave devices need to be configured. Using a PC with u-center is the most convenient method.2.1Connecting to a PCOnly low-voltage serial connections are exposed on the interface. Use for example an FDTI USB-to-UART cable adapter to connect with u-center to enable configuration and control of the RCB-F9T boards.Figure 1 shows the type of cable necessary. The FTDI TTL-232RG-VREG3V3-WE cable supports +3.3 V based TTL-level UART signals and provides a +3.3 V / 250 mA regulated rated output for providing board power.☞TTL-232RG-VREG3V3-WE from FTDI is a wire ended-cable. Figure 1 shows an example with a connector termination, that is, provision must be made to enable connection to the RCB-F9T signal connector pins.Figure 1: TTL-232RG-VREG3V3-WE cableFigure 2 shows the cable signals and the wire colors for the signals on the TTL-232RG generic cables.Figure 2: TTL-232RG generic cables connections (numbers refer to pad numbers on the PCB)For information on connecting the cable wires and RCB-F9T pins, see Table 2.Figure 3: TTL-232RG generic cables mechanical details (dimensions in mm)For more information on the FTDI cables, see/Products/Cables/USBTTLSerial.htm.2.1.1RCB-F9T pin assignmentThe board and connector position is shown in Figure 4.Figure 4: RCB-F9T pin assignmentThe pin functionality is depicted in Table 1.Pin no. Name I/O Description1 VCC_ANT I Antenna power supply, 5.0 V max 100 mA2 VCC I Operating voltage, 3.3 V3 TXD O UART TXD, LVCMOS4 RST I Hardware reset5 RXD I UART RXD, LVCMOS6 TP1 O Time pulse1, LVCMOS7 TP2 O Time pulse2, LVCMOS8 GND - GroundTable 1: RCB-F9T pin assignmentUse the FTDI USB serial cable in the following connection scheme to enable operation with a PC.The two boards must be separately configured for differential timing operation prior to connecting them for testing.RCB-F9T USB cable colorPin 2 RedPin 8 BlackPin 3 YellowPin 5 OrangeTable 2: Cable connection matrixFigure 5: Both RCB-F9Ts connected to laptop2.2AntennaIn the connections described here, no antenna supply is provided from the RCB-F9T to the antenna. To solve this issue, you can provide a DC supply to RCB-F9T connector pin 1, or use a bias T at the RF connector to supply the antenna.The ANN-MB (L1/L2) or ANN-MB1(L1/L5) active antenna available from u-blox provides good performance in a convenient form factor for use with the RCB-F9T. It requires a supply voltage from 3.0-5.0 V at typically 15 mA. The product is shown in Figure 6; for more information, consult the product web page at : https:///en/product/ann-mb-series.Figure 6: ANN-MB, u-blox multi-band active GNSS antenna3Receiver configuration3.1Master and slave configurationBefore configuring the boards ensure that u-center is communicating properly. The default baud rate for the boards is 115200.It is recommended that the following UBX messages are enabled on both the master and slave boards.•UBX-NAV-PVT•UBX-NAV-SAT•UBX-NAV-SIG•UBX-NAV-STATUS•UBX-RXM-RTCMUse the u-center Generation 9 Advanced Configuration View for setting the configuration items detailed later. For more information, see ZED-F9T documentation [3].3.2Master location configurationTo use the TIME fix mode, the receiver requires known fixed antenna coordinates. This can be supplied via two methods as described below:•If the coordinates are not known, the receiver can perform a self-survey of its position.•If the coordinates are known, they can be entered directly.3.2.1Survey-inSurvey-in is a procedure that is carried out prior to entering Time mode. It estimates the receiver position by building a weighted mean of all valid 3D position solutions.Two major parameters are required when configuring this mode:• Minimum observation timeThis defines the minimum observation time independent of the actual number of fixes used for the position estimate.• 3D position standard deviationThis defines a limit on the spread of positions that contribute to the calculated mean.To configure a timing receiver into survey-in mode, the following configuration items are required:•CFG-TMODE-MODE - set to survey-in•CFG-TMODE-SVIN_MIN_DUR - survey-in minimum duration•CFG-TMODE-SVIN_ACC_LIMIT - survey-in position accuracy limitAfter setting the mode and completing the termination parameters the survey sequence begins.The survey-in status can be queried using the UBX-TIM-SVIN message. Survey-in ends when both requirements are successfully met.☞Note that the timing receiver should not be fed RTCM corrections while it is in survey-in mode. 3.2.2Fixed positionHere the timing receiver position coordinates are entered manually. Note that any error in thereceiver antenna position coordinates will translate into timing errors.To enable fixed mode the following configuration items are required:•CFG-TMODE-MODE receiver mode - set to fixed•CFG-TMODE-POS_TYPE - determines whether the ARP position is given in ECEF or LAT/LON/HEIGHTDepending on the position coordinate method the following items are required:For ECEF:•CFG-TMODE-ECEF_X ECEF X coordinate of the ARP position•CFG-TMODE-ECEF_Y ECEF Y coordinate of the ARP position•CFG-TMODE-ECEF_Z ECEF Z coordinate of the ARP position•CFG-TMODE-ECEF_X_HP high-precision ECEF X•CFG-TMODE-ECEF_Y_HP high-precision ECEF Y•CFG-TMODE-ECEF_Z_HP high-precision ECEF ZFor Lat/Lon/Height:•CFG-TMODE-LAT latitude of the ARP position•CFG-TMODE-LAT_HP high-precision latitude of the ARP position•CFG-TMODE-LON longitude of the ARP position•CFG-TMODE-LON_HP high-precision longitude of the ARP position•CFG-TMODE-HEIGHT height of the ARP position•CFG-TMODE-HEIGHT_HP high-precision height of the ARP positionFor both types an accuracy estimate is required:•CFG-TMODE-FIXED_POS_ACC Fixed position 3D accuracy estimate3.3Master UART1 configurationsTo use the differential timing mode, you must set the communication protocols carefully. Use u-center to ensure the master serial port is configured for the following speed and protocol settings.•CFG-UART1-BAUDRATE set to 460800•CFG-UART1INPROT-UBX set to true•CFG-UART1INPROT-NMEA set to true•CFG-UART1OUTPROT-UBX set to false•CFG-UART1OUTPROT-NMEA set to false•CFG-UART1OUTPROT-RTCM3X set to trueUART1 will respond to UBX and NMEA input messages but only RTCM3 messages are enabled for output.To set up the required RTCM3 messages on UART1send the following configuration items with rate set to 1:•CFG-MSGOUT-RTCM_3X_TYPE1005_UART1•CFG-MSGOUT-RTCM_3X_TYPE1077_UART1•CFG-MSGOUT-RTCM_3X_TYPE1087_UART1•CFG-MSGOUT-RTCM_3X_TYPE1097_UART1•CFG-MSGOUT-RTCM_3X_TYPE1127_UART1•CFG-MSGOUT-RTCM_3X_TYPE1230_UART1•CFG-MSGOUT-RTCM_3X_TYPE4072_1_UART1Tip: To save the current configuration, send a CFG-CFG message. This way you will be able to power-cycle the receiver without repeating the above steps.3.3.1Verifying the master configurationAfter entering the fixed coordinates and configuring the necessary protocols, ensure that the configuration is correct by checking that:•The master is in TIME mode.☞Ensure the NAV-PVT message is enabled to verify the position fix mode is reported on the docking window.•The packet console shows the configured RTCM messages.•The “Messages View” shows the configured RTCM messages.☞The RTCM 1005 message is only output when the receiver is operating with a TIME fix mode. 3.4Slave configurationPrior to operation the slave receiver should be surveyed in similarly to the master. See the instructions in 3.2. The module configuration will receive RTCM 3 messages by default which is necessary to enable differential timing operation. The configuration must also ensure that the slave is able to receive at the transmitted baud rate.The following configuration is recommended to recognize RTCM messages but also to allow normal NMEA and UBX messages to be used to verify the slave operation.•CFG-UART1-BAUDRATE set to 460800•CFG-UART1INPROT-UBX set to true•CFG-UART1INPROT-NMEA set to true•CFG-UART1INPROT-RTCM3X set to true•CFG-UART1OUTPROT-UBX set to true•CFG-UART1OUTPROT-NMEA set to true4Master-to-slave cable connectionsOnce the configuration has been completed, make the following interconnections to allow corrections from master to slave.The master UART TXD signal is applied to the slave UART RXD input to receive the RTCM correction messages.Figure 7: Master to slave cable connectionSee Table 1 for RCB-F9T pin assignment.Figure 8: Master to slave cable connection exampleFigure 8 shows an example connection setup. In this instance the slave RXD input is shared between the master TXD output and a USB connection to u-center. This provides a route for the correction messages and allows the user to reconfigure the slave if required.☞When sending configuration commands or other messages from u-center to the slave unit, disconnect the master output to prevent data collisions.4.1Verifying slave operationTo make sure that the slave is using the RTCM corrections, check the following output messages via u-center:•RXM-RTCM shows the RTCM received messages from the master.•NAV-SAT shows the use of the pseudo-range differential corrections for each satellite.•NAV-SIG shows the use of pseudo-range corrections for each signal.For optimal performance, the slave’s time pulse configuration (set using UBX-CFG-TP5) should match that of the master. Preferably it is set with an identical GNSS system time or UTC time grid. Ifa UTC time grid is used, ensure that each is operating with an identical UTC variant and that thecorresponding GNSS constellations are enabled to ensure this.To show that the slave device is applying correction data monitor, the Fix Mode is shown as aDGNSS fix mode, see Figure 9 .Figure 9: Fix Mode showing DGNSS fix mode☞Enable NAV-PVT message to make sure that the position fix type is plotted on the docking window.Related documentation[1]ZED-F9T Integration manual, UBX-19005590[2]RCB-F9T Integration manual, UBX-19003747[3]ZED-F9T Interface description, UBX-18053584☞For product change notifications and regular updates of u-blox documentation, register on our website, .Revision historyRevision Date Name CommentsR01 27-Oct-2020 dama Initial releaseR02 13-May-2021 byou Updated with slave port config, + grammar, typo corrections, legacy configsconverted to current style.ContactFor complete contact information, visit us at . u-blox OfficesNorth, Central and South Americau-blox America, Inc.Phone: +1 703 483 3180 Email: ******************Regional Office West Coast: Phone: +1 408 573 3640 Email: ******************Technical Support:Phone: +1 703 483 3185 Email: ******************HeadquartersEurope, Middle East, Africau-blox AGPhone: +41 44 722 74 44Email: ***************Support: ******************Asia, Australia, Pacificu-blox Singapore Pte. Ltd.Phone: +65 6734 3811Email: ******************Support: *********************Regional Office Australia:Phone: +61 3 9566 7255Email: *******************Support: *********************Regional Office China (Beijing):Phone: +86 10 68 133 545Email: ******************Support: *********************Regional Office China (Chongqing):Phone: +86 23 6815 1588Email: ******************Support: *********************Regional Office China (Shanghai):Phone: +86 21 6090 4832Email: ******************Support: *********************Regional Office China (Shenzhen):Phone: +86 755 8627 1083Email: ******************Support: *********************Regional Office India:Phone: +91 80 405 092 00Email: ******************Support: *********************Regional Office Japan (Osaka):Phone: +81 6 6941 3660Email: ******************Support: *********************Regional Office Japan (Tokyo):Phone: +81 3 5775 3850Email: ******************Support: *********************Regional Office Korea:Phone: +82 2 542 0861Email: ******************Support: *********************Regional Office Taiwan:Phone: +886 2 2657 1090Email: ******************Support: *********************。
(内部资料)爱立信指令大全(有注释,通俗易懂)(申精)
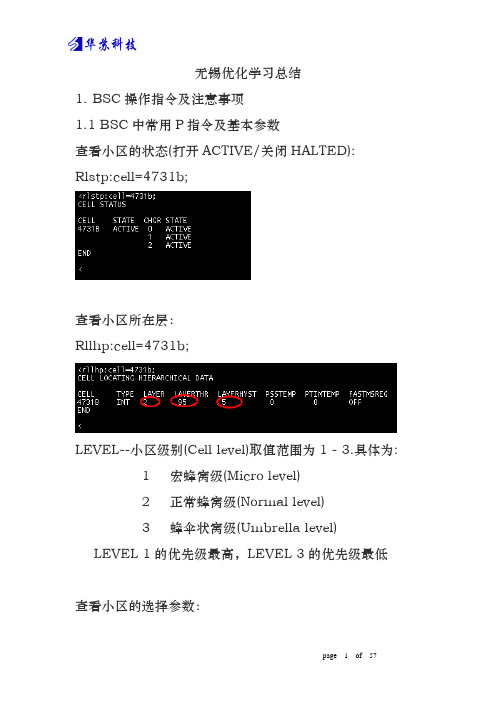
无锡优化学习总结1.BSC操作指令及注意事项1.1 BSC中常用P指令及基本参数查看小区的状态(打开ACTIVE/关闭HALTED): Rlstp:cell=4731b;查看小区所在层:Rllhp:cell=4731b;LEVEL--小区级别(Cell level)取值范围为1 - 3.具体为:1 宏蜂窝级(Micro level)2 正常蜂窝级(Normal level)3 蜂伞状窝级(Umbrella level)LEVEL 1的优先级最高,LEVEL 3的优先级最低查看小区的选择参数:Rlsbp:cell=xxxx;查看小区逻辑信道:Rlslp:cell=d479b;查看小区的BCCHRldep:cell=41361c;(查看BCCH)查看小区的频点:Rlcfp:cell=d479b;查看邻区关系中的测量频点:Rlmfp:cell=41361c;(查看测量频点)查看两小区之间的邻区关系:Rlnrp:cell=4731b,cellr=all,nodata;查看两小区之间的切换参数:Rlnrp:cell=4731b,cellr=41103f;KOFFSETP/KOFFSETN:切换边界偏移参数,N是负偏移,P是正偏移LHYST:是切换磁滞,防止乒乓切换。
查看小区的滤波器参数:Rllfp:cell=xxxx;这些是滤波器类型,一般不动;SSLENSD:话音信号强度滤波器长度,信号变化快的区域调小,加快切换;QLENSD:话音信号质量滤波器长度,质量变化快的区域调小,加快切换,一般设置比SSLENSD小;SSLENSI:信令信号滤波器长度,和SSLENSD类似,作用于信令阶段QLENSI:信令质量滤波器长度,和QLENSD类似,作用于信令阶段SSRAMPSD:话音信号强度斜坡参数,滤波器充满的周期数,在滤波器充满之前服务信号被低估,SSRAMPSI :话音信号质量斜坡参数,滤波器充满的周期数,在滤波器充满之前服务质量被低估(即刚开始的时候邻区是被低估的,要经过SSRAMPSD设置的周期后才按照正常值进行滤波处理,减小这两个值自然更好的适应快速移动环境!)滤波器长度实际上就是采样窗口的的大小,即以多少个测量报告进行算术平均或加权平均计算,根据计算出的结果来判断是否应该切换。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
I. P132 PSB2.9
a) Working capital.
b) Current ratio.
c) Current cash debt coverage ratio.
d) Debt to total assets ratio.
e) Cash debt coverage ratio.
f) Profit margin ratio.
G) Return on assets ratio
III.Apr.1 Shareholders invested $13 000 cash in exchange for shares.
1.Borrowed $2000 from the bank for 2years.
2.Hired a personal assistant at a salary of $300 per week , payable monthly.
2.Paid office rent for the month $700.
3.Purchased an equipment for cash $3000.
4.Paid cash $2400 for a 1 –year insurance policy
5.Purchased architectural suppliers on account from Halo Ltd,$1 500.
pleted blueprints on a carport and invoiced Speedy $2500 for services .
11.Received $500 cash advance from R.Welk for the design of a new home.
16.Received $2000 cash from Speedy in transaction on April 10.
20.Received $1 800 cash for services completed for P.Donahue.
30.Paid assistant for the month $1 200
30.Paid $800 owed to Halo Ltd
30.Paid dividends to shareholder $500
Required :
a)Journalise the transactions ,including narrations.
b)Post to the ledger accounts using T accounts.
c)Prepare a trial balance on 30 April,2010 .
d)Prepare an income statement for April and a balance sheet.
1.The equipment depreciates $300 per month.
2.The revenue received in advance was for the 9 months commencing 1 April.
3.Interest of $600 is accrued on the bank loan.
4.Supplies on hand total $1000.
5.Insurance expires at the rate of $300 per month.
6.Salaries of $1000 are unpaid at 30 June.
Required:
a) Prepare the adjusting entries, assuming that adjusting entries are made quarterly.
b) Prepare the adjusted trial balance at 30 June.
c) Prepare an income statement for April and a balance sheet.
520 Depreciation Expense 530 Insurance Expense 220 Interest Payable 540 Supplies Expense 550 Interest Expense。