科技外文文献原文
一篇英语科技文献摘要范文

一篇英语科技文献摘要范文Title: The Impact of Artificial Intelligence on HealthcareAbstract:Artificial Intelligence (AI) has been revolutionizing various industries, and healthcare is no exception. This paper explores the impact of AI on healthcare, includingits benefits and challenges. AI technologies such as machine learning, natural language processing, and robotics have the potential to improve patient care, diagnosis, treatment, and operational efficiency in healthcare settings. However, the integration of AI in healthcare also raises ethical, privacy, and security concerns. This paper discusses both the positive and negative implications of AI in healthcare and provides recommendations for future research and development in this field.中文:标题:人工智能对医疗保健的影响摘要:人工智能(AI)已经在各个行业进行革命性改变,医疗保健行业也不例外。
本文探讨了人工智能对医疗保健的影响,包括其益处和挑战。
英文文献 科技类 原文及译文33

Multi-texture-model for Water Extraction Based on Remote Sensing ImageHua WANG, Li PAN, Hong ZHENGSchool of Remote Sensing and Information & Engineering, Wuhan University 129 Luoyu Road,Wuhan 430079,P.R.ChinaSchool of Electronic Information, Wuhan University 129 Luoyu Road, Wuhan 430079,P.R.ChinaAbstract:In this paper, a multi-texture-model for water extraction based on remote sensing imagery is proposed. The model is applied to extract inland water (including wide river, lake and reservoir)from high-resolution panchromatic images. Firstly directional variance is used to find river regions, and then grain table is adopted to avoid noise including objects that have similar directional variance characteristic as water surfaces. The experiment result shows that the proposed method provides an effective way for water extraction.1. IntroductionThe recognition of water from remote sensing image has drawn considerable attention in recent yeas. A large number of publications about water extraction appeared and various approaches for water extraction have been proposed. Zhou developed a descriptive model for automatic extraction of water based on spectral characteristics[1]. Barton applied channel 4 for NOAA/AVHRR to extract water[2]. Du proposed a approach for water extraction from SPOT-5 based on decision tree algorithm[3]. Li recognized and monitored clear water from MODIS[4]. Wu extracted water from Quick Bird image and used active contour model to obtain accurate position of river bank[5]; In order to extract water from high-spatial remote sensing images, He used wavelet technique to expend the information and cleaned main noise of the images, and then presented multi-window linearity reserve technique to conserve linear water[6].Recently, most research work on water extraction was forced on automatic recognition of water from remote sensing images based on spectral characteristics. However, there are some disadvantages of these methods: (1) The resolution of image used for water extraction is low. The minimum size of recognizable object is depended on the spatial resolution of sensor. Therefore it is difficult to obtain accurate position of water boundary. (2) Due to the characteristic of water itself and the sensor applied, in certain channels the spectral features of different objects are equilibrated. The equilibration leads to the phenomena of “different objects same image” or“different images same object”, which results in noise objects included in extraction result.In this paper, a multi-texture-model for water extraction based on remote sensing is proposed. The model is applied to extract inland water (including wide river, lake and reservoir) fromhigh-resolution panchromatic image. Firstly directional variance is applied to find river regions, and then grain table is adopted to avoid noise including objects that have similar directional variance characteristic as water surfaces. The experiment result shows that the proposed method provides an effective way for water extraction.This paper is organized as follows. In Section 2, the directional variance model adopted is introduced. Then, fusion of proposed grain table model with directional variance model is discussed in Section 3.The experimental results of the proposed multi-texture-model and comparative studies with single models are given in Section 4. We conclude this paper in Section 5.2. Directional Variance ModelThe aim of our research is to extract water larger than 100m2from panchromatic images. As shown in Figure 2(a), the research objects can be divided into three classes: wide river, lake and reservoir, which all represent as region in high-resolution imageries. The objects of background can be divided into two classes: building and cropland, which also represent as region.In panchromatic imagery, wide river has a similar gray level to building and cropland, though the mean grayof lake and reservoir is much lower than the background objects. Conventional methods for water extraction based on spectral characteristics are not effective in the situation. In the meantime, water body defines homogeneous areas whereas building and cropland correspond to heterogeneous regions. Therefore, we take into account the homogeneity of the image to separate wide river, lake and reservoir from background instead. To characterize the difference of homogeneity between water body and the other types of areas, we use a textual operator: the directional variance.2.1. The Directional Variance OperatorThe operator is derived from those defined by Guerin & Maitre and Airault & Jamet[10]. As shown in Figure1, the directional variance consists in computing, for each pixel M of the image, the variance of the gray levels of the image on several direction of a circle whose center is M and radius is R. Then, the direction with the highest variance value is kept. Its direction defines the direction for which image is the most heterogeneous, locally. Its variance value is the directional variance value of the pixel M.2.2. Extraction of water based on directional varianceAccording to the definition of the operator, the minimum acreage of recognizable water body is depended on the length of radius R. We have chosen a length of 10 pixels for 1m resolution. The directional variances of the five typical training samples (wide river, lake, reservoir, building and cropland) have been computed and the statistical comparison is summarized in Table1. The overall average of water directional variance is lower than the objects of background.Nevertheless, the directional variance of cropland is similar to wide river with overlapping potion over 90%.Inhigh-resolution panchromatic imagery, details inside wide river, such as boat, wave, etc, are represented clearly which result in the heterogeneous of water. In the meantime, the textures of parts of building (for example, roof ) and cropland are rather fine. In a small window, these potions define homogeneous areas with similar directional variance as wide river. The result is improved if we chosen a length of 100 pixels. The statistical comparison is shown in Table2. If the length of radius is large enough, directional variance of building is higher than other objects obviously with no overlapping portion; the difference between cropland and wide river is increased while the overlapping potion is decreased. However, increasing the radius leads to two problems which are outlined as follow:1) The size of recognizable water body increases;therefore water which has small acreage (for example narrow river) can not be detected.2) The position of water bank is not accurate although the spatial resolution of imagery is rather high.Hence, in this paper, a multi-texture-model is presented and two texture models are fused to extract water from panchromatic images. Firstly, we chose a radius of 10 pixels to extract water based on directional variance; and then, grain table is adopted to avoid noise including parts of building and cropland that have similar directional variance characteristic as water surface.3. Multi-texture-modelIn high-resolution imagery, cropland and building represents structural characteristic. According to this characteristic, grain analysis is adopted for further research on the original extraction based on directional variance. The grain table histogram is able to represent structural characteristic of the research object, which can be applied to recognize many kinds of different objects [12].3.1. Extraction of water fused by grain tableThe grain table histograms of the five typical training samples (wide river, lake, reservoir, building and cropland) are computed and correlation coefficients between them are summarized in Table3. Correlation coefficients between water classes are over 85%, however, correlation coefficients between water classes and background classes are lower than 65%.Hence, we compare the correlation coefficients of regions in extraction image base on directional variance with three water samples and two background samples respectively. If the region has a higher correlation coefficient with background classes, it will be marked background and wiped off[13].4.Experimental ResultsWe run the algorithm on several high-resolution panchromatic images. In Figure2.(a), we have been considering an aerial photograph(6126×4800) of a region in Wuhan, China, the resolution of which is 1m,including building, cropland, wide river( Changjiang river), lake, reservoir and cropland. The results of extraction based on directional variance with radius of 10 pixels is displayed in Figure2.(b), and clearly, water has been detected completely, whereas parts of building and cropland are included as noise objects in the result. Water extraction using directional variance with radius of 100 pixels is displayed in Figure2.(c)with correctness over 95%, however, small lakes are missed and the position of bank is not as accurate as Figure2.(b). Finally, in Figure2.(d), the result of Figure2.(b) is fused by grain table analysis, so that the correctness and completeness of extraction are both over 90%.5. ConclusionsBased on textural analysis of water in high-resolution panchromatic imagery, a multi-texture-model is presented for water extraction.The experimental results proved that the approach is efficient for inland water (including wide river, lake and reservoir) extraction. As the complexity and diversity of water, the rate of recognition of our algorithm fluctuates. Furthermore, the method is supervised which needs a lot of human interference to obtain training samples. Therefore, there are problems to be solved in future:1) Our further work should be extensible to multispectral remote sensing images.2) To decrease human interference, old vector will be applied to obtain training samples instead. 6. AcknowledgmentsThe work was supported by the National Key Technology R&D Program of China under grant No.2006BAB10B01.根据遥感图象的多纹理模型相关的水抽取Hua WANG, Li PAN, Hong ZHENGSchool of Remote Sensing and Information & Engineering, Wuhan University 129 Luoyu Road,Wuhan 430079,P.R.ChinaSchool of Electronic Information, Wuhan University 129 Luoyu Road, Wuhan 430079,P.R.China文摘:在本文中,提议了一个多纹理模型为根据遥感成像的水提取。
10外文资料原文
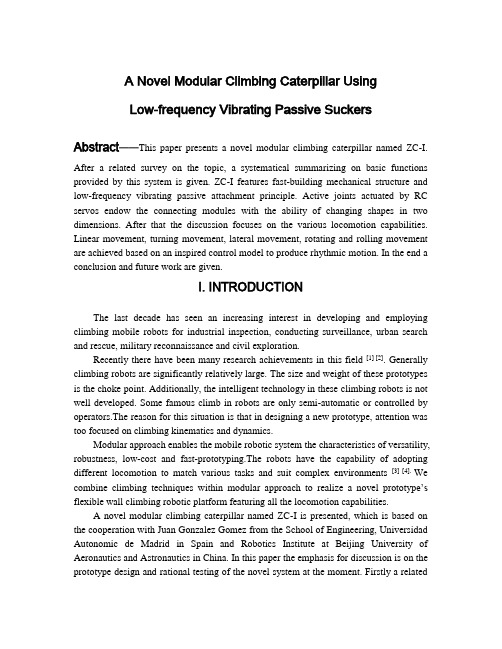
A Novel Modular Climbing Caterpillar UsingLow-frequency Vibrating Passive SuckersAbstract——This paper presents a novel modular climbing caterpillar named ZC-I.After a related survey on the topic, a systematical summarizing on basic functions provided by this system is given. ZC-I features fast-building mechanical structure and low-frequency vibrating passive attachment principle. Active joints actuated by RC servos endow the connecting modules with the ability of changing shapes in two dimensions. After that the discussion focuses on the various locomotion capabilities. Linear movement, turning movement, lateral movement, rotating and rolling movement are achieved based on an inspired control model to produce rhythmic motion. In the end a conclusion and future work are given.I. INTRODUCTIONThe last decade has seen an increasing interest in developing and employing climbing mobile robots for industrial inspection, conducting surveillance, urban search and rescue, military reconnaissance and civil exploration.Recently there have been many research achievements in this field [1] [2]. Generally climbing robots are significantly relatively large. The size and weight of these prototypes is the choke point. Additionally, the intelligent technology in these climbing robots is not well developed. Some famous climb in robots are only semi-automatic or controlled by operators.The reason for this situation is that in designing a new prototype, attention was too focused on climbing kinematics and dynamics.Modular approach enables the mobile robotic system the characteristics of versatility, robustness, low-cost and fast-prototyping.The robots have the capability of adopting different locomotion to match various tasks and suit complex environments [3] [4]. We combine climbing techniques within modular approach to realize a novel prototype’s flexible wall climbing robotic platform featuring all the locomotion capabilities.A novel modular climbing caterpillar named ZC-I is presented, which is based on the cooperation with Juan Gonzalez Gomez from the School of Engineering, Universidad Autonomic de Madrid in Spain and Robotics Institute at Beijing University of Aeronautics and Astronautics in China. In this paper the emphasis for discussion is on the prototype design and rational testing of the novel system at the moment. Firstly a relatedsurvey including kinematics of motion and attachment principle of climbing robots is given systematically. After summarizing the basic functions provided by this system, the mechanical structure and low-frequency vibrating passive attachment principle are introduced in detail. ZC-I features identicalactive joints actuated by RC servos which endow the connecting modules with the ability of changing shapes in two dimensions. After that the discussion focuses on the various locomotion capabilities. In the end a series of relative simulations and tests are given to confirm our design principles described above.II. RELATED WORKThere are two important issues in designing a climb in robots: the attachment principle and the light weight mechanical structure.A.Attachment Principles for Climbing RobotsThere are four different principles of adhesion used by climbing robots: electromagnetic force; molecular force; vacuum and mechanical forces. Each one has advantages and disadvantages at the same time. Two disadvantages are the bottlenecks for using the electromagnet in our project. Firstly electromagnetic force is not suitable for general climbing robots because of the validity only on the ferromagnetic surfaces. Meanwhile, even if the adhesion is reliable and easy-controlling, for actuating the electromagnet it still needs a big heavy power supply. There is no possibility of application on light weight climbing robots expect for some special cases [5].Inspired by gecko bristles [6], the last few years have witnessed a strong interest in applying molecular force as anew attachment method for climbing robots. With the development of nanotechnology, some flexible climbing prototypes are emerging. It is a promising reliable attachment principle for climbing from the technical point of view. However, the benefits of this novel adhesive principle are offset by expensive manufacturing price and difficulties. Based on the technology level at the moment, it still will take some time for real industrial application.There are some climbing prototypes using mechanical forces for attachment on the vertical surface. The grasping gripper is the relatively prevalent. Usually the climbing robots based on this attachment are working in some specialized environment such as metallic-based buildings [7][8]. In order to realize climbing movement, the mechanical structure of the robots is not designed modularly.A propeller is another way to provide the mechanical attachment force. Akira Nishi and Harmer Miyagi developed a kind of wall-climbing robot using the propulsive forceof propellers [9]. It is very light but the noise generated by propellers is too loud to use. Meanwhile the adhesion is quite weak as a potential universal attachment method.It is noted that suction cups are still the most common attachment devices for climbing robots. There are also two different sub principles to generate vacuum: negative pressure and vacuum suckers. Actuated by electrical motors[10]in its negative pressure chamber, the climbing robot can move on the wall flexibly and continuously. Even if the negative pressure chamber is not sensitive to a leakage of air, this method will not be enough for the safe and reliable attachment to the vertical surface when the robot has to cross some high obstacles.The vacuum in the suckers is usually established by vacuum ejectors or vacuum pumps [11]. The advantages of high reliability and easy-controlling of vacuum ejectors and vacuum pumps are offset by adding the long air tube correlatively heavy devices on the climbing robots, thus limit the application of this adsorption on smart wall-climbing robots.B.Kinematics of Climbing RobotsCurrently there are several different kinds of kinematics for motion on smooth vertical surfaces: multiple legs, sliding frame, wheeled and chain-track vehicle. The robots with multiple-legs kinematics are complex due to a lot of degrees of freedom. This kind of robots which use vacuum sucker sand grasping grippers for attachment to the buildings do not meet the requirements of miniaturization and low complexity.Since 1996 our group has been developing a family of Sky Cleaner autonomous climbing robots with sliding frames for glass-wall cleaning [12]. The first two prototypes are mainly used for research and the last one is a real commercial product designed for cleaning the glass surface of the Shanghai Science and Technology Museum. The suitable working height of Sky Cleaners should be below fifty meters because the weight of the hoses providing air source and cleaning liquid from the ground has to be taken into account when the robots work in mid-air.The robots with a wheeled and chain-track vehicle are usually portable. As mentioned before, the adhesion used by this kind of robots is negative pressure or propellers, therefore the robots can move continuously. It is possible to integrate the vacuum suckers with this kind of mechanism in our project in order to take advantages of simply structure and reliable attachmentOur proposed climbing caterpillar is also a kind of inspired robot. Some snake-like robots are well developed with the time. The famous snake robot concept is the Active Cord Mechanism from Shigeo Hirose [13]. Classmen also developed a mobile robot with six active segments and a head for the inspection of sewage pipes [14]. Twelve wheels oneach module provide the driving force. Amphibious snake robot is proposed at school of computer and communication sciences, in Lausanne [15]. It can swim in the water and crawl on the ground. Another Poly Bot [16] is able to optimize the way its parts connect to fit the specific task. It adopts its shape, becoming a rolling type to pass over flat ground, an earthworm type to move in narrow spaces and a spider type to stride over unknown hilly terrain.To the best of our knowledge there is currently no similar robot that can both travel on the vertical surface and crawl with serpentine locomotion on ground. A smart climbing caterpillar is a completely novel prototype meeting all requirements of functionality, safety, flexibility, extensibility and easy handling while being completely automatic and able to learn by itselfIII. PROTOTYPE DESIGNA.Design ConsiderationsThe most important requirement for our robotic system moving on the slope with different materials is the extraordinary motion capabilities. The basic functions of inspired climbing caterpillar include following aspects. The climbing caterpillar has to be safely attached to the slope with different materials and has to overcome gravity.The mechanical structure for safe and reliable attachment to the vertical surface is needed. Now our research is focusing on the realization of new passive suckers which will save considerable power. Because of the unique vibrating adsorbing principle, the passive suckers can attach not only to glass, but also to a wall with aluminum tiles.It will be also crucial to develop technically optimal designs that are mechanically robust in order to withstand\stresses during climbing, when the weight of the whole robot has to be supported, as well as flexible enough, and are able to serve as manipulators for complex manipulation tasks. The robot should have a flexible mobility to get to every point in the work space. In order to finish a task in an unstructured environment, the ability to cross relatively high obstacles and span some gaps is indispensable. As a result, the robot should have different locomotion capabilities to match various tasks.As an inspired robot, it should own intelligence as much as possible in order to imitate a real natural caterpillar. In order to move freely, it is important for the mobile robot not to be wired or otherwise connected to the environment. The robot should carry all devices: onboard power, the controller, and wireless communication.B.Prototype DesignIn this project, we combine climbing techniques with the idea of a modular robot to realize a novel prototype. This multifunctional climbing caterpillar ZC-I will be capable of:1) Walking and climbing not only on rugged terrain but also on the vertical surfaces and ceilings on the inside of buildings;2) Locomotion capacities including pitching, yawing, lateral shift, and rotating;3) Sensor-servo-based active perception of the environment.Fig. 1 shows pictures taken from a 3D-animation of the planned robotic caterpillar in a variety of postures. This system is currently under development in our consortium.(a)1. Axis of the body;2. Head module;3. Body modules;4.Tail module(b)Fig.1 Prototype designThe major challenges in designing this robotic system are the smaller dimension and the ability to attach to the wall safely and move flexibly. The proposed climbing caterpillar should have various moving modes. Up to data, the system consists of eleven cross-connected modules for traveling. Actually only two kinds of modules are in the system: the head and tail module; the body module. The mechanical structure can be reconstructed and is flexible due to its similar modules and special connection joints.The head and tail module consists of a CCD camera and mechanical shell with two pairs of ears (Fig 2a). There is no embedded DOF so that it cannot move actively. The CCD camera is connected to two ears using screws. On the other pair of ears, four small holes and a big central hole are designed for assembling with RC servos on a body module. While the single body module is about 50 centimeters long,50 centimeters wide and 50 centimeters high, as shown in Fig.2b. It consists of a shell with three pairs of ears, a RC servo and a pair of small passive suckers which are fixed to the shell. A turning waist joint actuated by a RC servo connects adjacent modules. Fig. 3 shows two different ways to assembly the modules. The driving servo is fixed to a pair of ears on Module 1; while the rotating plate of the servo is fixed to another pair of ears on Module 2 through four holes separately. Two modules will setup together automaticallywhen the rotating plate is fixed to the servo again. In this way, the caterpillar will be assembled around the horizontal axis and vertical axis alternately. As a result actuating by the servo, one DOF active rotating joint within ±90 degree enables the adjacent modules to adopt pitching and yawing movements to negotiate difficult tasks.(a).Head and tail module (b). Body moduleFig. 2 Basic modulesFig. 3 Draft of connecting principleTo ensure its ability of performing tasks individually and keep the extensibility, there is enough space in each module for sensors, the onboard controller, and batteries. In order to achieve a dexterous movement mechanism, considerable stress is laid on weight reduction as well as on construction stiffness. The total robot will weigh approximately 2 kg including the batteries.C. Low-frequency Vibrating Passive SuckersA new low-frequency vibrating passive suction method is presented in order to keep the merits and eliminate the shortcomings of using the normal active vacuum suckers. There are two reasons for designing a passive sucker for climbing robots. Firstly, the climbing robot can be made lightweight and dexterous. Application of a new low-frequency vibrating passive suction method makes impossible to free climbing robots from the heavy vacuum ejectors and realize an effective simple adsorption, furthermore improve the inspired technological level and flexibility of the locomotion capability. Secondly, the attachment using suckers has the characteristic of passive compliance due to the compressibility of the material, thus makes the robot safer thanother principles. Some previous work has been done recently in our consortium [16].Fig. 4 The principle of Low-frequency vibrating suckersFig. 4 shows the principle of low-frequency vibrating suction attachment. Where P1 is the minimum of the vacuuming the passive sucker for attachment; P2 is the suitable negative pressure for reliable attachment; P3 is the maximum of the vacuum inside the passive sucker.From the beginning of the process, the passive sucker is pushed against on the vertical surface. It can be attached when the inside air is squeezed out so that the internal vacuum is established, as shown at T0. At the T1, when the squeezing process almost finished, the negative pressure will be increased to P2. Then if the passive sucker is lift up suddenly by external force, the internal vacuum will increases a lot. The reason for this higher negative pressure P3 is the sucker’s internal volume increases remarkably while the internal air is as same amount as ever.It is noted that the internal negative pressure will descend with the time due to the leakage of vacuum. It is only a matter of time that passive suckers will release down anyway. The adsorption time is dependent on the characteristics of the wall surface, such as smoothness and cleanness. However, if the passive sucker is pushed down again before it drops down at time T3, the internal vacuum can be rebuilt for sure. It is cycle from T0 to T3. As a result, the passive sucker will keep attachment reliably on the vertical wall for some longer time.Based on this principle, a DC motor is used as an oscillator to realize the pushing and lifting movement automatically, as shown in Fig. 5. The vacuum inside sucker is established by low frequency vibration of the cup against the wall surface so that the stability and reliability are met. A wheel with passive suckers can move up-down smoothly on the wooden board. This on-site test confirms principle described above.Fig. 5 The rational experiment of Low-frequency vibrating suckersIV. LOCOMOTION CONTROLLocomotion systems following biologically inspired ideas are currently dominated by walking machines [17]. The climbing caterpillar has to attach itself to the wall surface safely and reliably using vacuum suckers. That means there are always several point-constraints between the robotic system and the working space during the movement, while the robotic snake can slide on its work space without any constraints at all. The control of our caterpillar is based on sinusoidal generators to produce rhythmic motion. From the biological point of view, these generators act like the Central Pattern Generators (CPG) located in the spinal cord of the animals to control variation of the rotation angle of each module.The sinusoidal generators produce very smooth movements and have the advantage of making the controller much simpler. Our model is described by the following equation (1) [18]. Where y i is the rotation angle of the corresponding module; Ai is the amplitude; T is the control period; t is time; Φi is the phase; O i is the initial offset.y = A i sin(2πt | T +φi) + O i(1) Fig. 6 shows a sketch map of the control algorithm. Eight sinusoidal generators are represented to actuate all modules to rotate. According to the connecting relationship of the modules, they are divided into horizontal and vertical groups, which are described as Hi and Vi respectively. Where i means the module number; ΔΦV is the phase difference between two adjacent vertical modules; ΔΦH is the phase difference between twoadjacent horizontal modules; ΔΦHV is the phase difference between two adjacent horizontal and vertical modules.Fig. 6 Representation of the control algorithmFive locomotion gaits including linear movement, turning movement, rolling movement, lateral movement and rotating movement have been achieved using the above sinusoidal generators. Fig. 7 shows the simulation results. The parameters for different locomotion capabilities are summarized in table.A Linear MovementB Turning MovementC Rolling MovementD Lateral MovementE Rotating MovementFig. 7 Simulation of five different locomotion gatesV. IMPLEMENTATIONThis system is currently under development in our consortium from 2006. The implementation includes following steps: reliability of the attachment, lightweight mechanical module and movement function realization. In order to shorten the research time-consumption, three parts are carried through at the same time.Firstly, a series of the successful experiments with a modular reconfigurable robot (Fig. 8) were carried out recently, confirming the principles described above and sinusoidal generators controlling. All locomotion gates have been achieved on-site.Fig. 8 Simulation of five different locomotion gatesFig. 9 The experimental bod y module and prototype connectingVI. CONCLUSION AND FUTURE WORKOur work in this paper involves highly integrated robotic systems such as walking machines and multi-foot systems. Combining the climbing techniques with the modular idea to realize this novel prototype will make the design and realization easier and more efficient.There is still a great amount of work for future research. Recently considering the importance and difficulty of the movement harmony among modules for realizing different gaits on surfaces of various materials, we are focusing on a kinematics model of the caterpillar's locomotion capabilities. The dynamics of the robot will be calculated with the LaGrange equation for system design and control purposes.This prototype will be used as an intelligent demonstrator and test bed for the implementation of cognitive functions in robotic systems. It will have flexible mobility to get to every point on different surfaces in working space and will be able to carry multiple sensors and wireless communication.REFERENCES[1] B. Klaassen, and K.L. Paap, “GMD-SNAKE2: a snake-like robot driven by wheels and a method for motion control”, Proceedings of IEEE International Conference on Robotics and Automation, Detroit,MI, 10-15 May, pp. 3014-3019,1999.[2] G. Granosik, M. G. Hansen, Johann Borenstein, “The Omnitread Serpentine Robot for Industrial Inspection and Surveillance”, Industrial Robot: An International Journal, Vol.32, No.2, pp.139-148, 2005.[3] A. Castano, W.M. Shen, P. Will, “CONRO: Towards Miniature Self-Sufficient Metamorphic Robots”, Autonomous Robots, Vol.13,pp.309-324, 2000.[4] M. Yim, G. David, et al., “Poly Bot: a Module Reconfigurable Robot”, Proceedings of the 2000 IEEE International Conference on Robotic sand Automation, San Francisco, CA, USA, April, 2000, pp.514-520,2000.[5] T. Akinfiev, M. Armada, “The Influence of Gravity on Trajectory Planning for Climbing Robots with Non-Rigid Legs”, Journal of Intelligent and Robotic Systems, Vol.35, pp.309-326, 2002.[6] M. Sitti, R. Fearing, “Synthetic gecko foot-robots”, Proceeding of IEEE international Conference on Robotics and Automation, Vol.pp.1164-110, Sept, 2003.[7] M. Abderrahim, C. Balaguer, A. Giménez, J.M. Pastor and V.M,Padron, “ROMA: A Climbing Robot for Inspection Operations”, Proceedings 1999 IEEE International conference on Robotics and Automation, Detroit, Michigan , May, pp.2303-2308, 1991.[8] H. Zhang, J. Zhang, R. Liu, G. Zong, “Realization of a service robot for cleaning spherical surfaces”, International Journal of Advanced Robotic Systems, Vol.2, No.1, pp. 53-58, 2005.[9] A. Nishi, H. Miyagi, “Wall-climbing Robot Using Propulsive Force of a Propeller (Mechanism and Control System in a Mild Wind)”, JSME International Journal Series C: Dynamics, Control, Robotics, Design and Manufacturing, Vol. 36, No. 3, pp.361-367, Sep, 1993.[10] W. Wang, G. Zong, “Analysis on The Mechanics Stability for a New Kind of Robot”, Journal of Robot, Vol.21, No.7, pp.642-648, 1999.[11] H. Zhang, J. Zhang, W. Wang, R. Liu, G. Zong, “Sky Cleaner 3-A Real Pneumatic Climbing Robot for Glass-Wall Cleaning” IEEE Robotic &Automation Magazine,Vol.13, No.1 pp32-41, 2006.[12] H. Zhang, J. Zhang, G. Zong, “Requirements of Glass Cleaning andDevelopment of Climbing Robot Systems” , Proceedings of the 2004IEEE International Conference on Intelligent Macaronis and Automation, Chengdu, China, August 26-31, pp.101-106,2004.[13] S. Hirose, “Biologically inspired robots (snake-like locomotors and manipulators)”, Oxford University Press, 1993.[14] B. Klaassen, and K.L. Paap, “GMD-SNAKE2: a snake-like robot driven by wheels and a method for motion control”, Proceedings of IEEE International Conference on Robotics and Automation, Detroit, I, 10-15 May, pp. 3014-3019,1999.[15] A.J. Ijspeert, “A connectionist central pattern generator for the aquatic and terrestrial gaits of a simulated salamander”, Biological Cybernetics,Vol.85, No. 5, pp. 331-348, 2001.[16] T. Zhu, R. Liu, X.D. Wang, K. Wang, "Principle and Application of Vibrating Suction Method", Proceedings of the 2006 IEEE International Conference on Robotics and Biomimetics, December 17 - 20, 2006, Kunming, China, pp.491-495.[17] K. Zimmermann, I. Zeidis, J. Steigenberger, “On artificial worms as chain of mass points”, Proceeding of Clawer 2004, pp11-18.[18] J. Gonzalez Gomez, H. Zhang, et.al. “Locomotion Capabilities of a Modular Robot with Eight Pitch-Yaw-Connecting Modules”, The 9thInternational Conference on Climbing and Walking Robots and their Supporting Technologies for Mobile Machines, CLAWAR2006,Brussels, Belgium, September 12-14, 2006.Fig. 8 Simulation of five different locomotion gatesFig. 9 The experimental body module and prototype connecting。
科技文献英语
Sophie-EST
15
1.5 Syntactic/grammatical Features
2020/8/13
1.5.1 More Use of Longer and Statement-type Sentences
1.5 Syntactic/Grammatical Features 语法特征
1.6 Semantic Features语篇特征
2020/8/13
Sophie-EST
12
1.4 Lexical Features
2020/8/13
highly technical words precise, narrow meanings unique to the discipline semi-technical words
Sophie-EST
18
1.5 Syntactic/grammatical Features
1.5.3 The frequent use of prepositional phrases and participle phrases
e.g. Non-finite structure
strength within reasonable limits. 2. It is necessary to use a more reliable method of
inspection in the form of a suitable test. the frequent use of passive voice
1.2.2 General Features the impersonal formal style and a very high concentration of technical terms • interpreting a phenomenon “out there” • impersonal, objective statements • being accurate and concise • to avoid misunderstanding
外文文献 科技 翻译及原文52

外文文献译文 (1)外文文献原文 (14)译文工业以太网与智能建筑1 工业以太网产生的背景(1) 统一现场总线标准成为泡影,诱惑依然1984年美国着手制定现场总线国际标准,若干年以来,世界各大公司为了商业的利益,现场总线标准始终不能统一。
通过多次投票、协商,2000年1月宣布的现场总线国际标准IEC61158将八种总线(Profibus,Interbus,P-NET,Worldfip等)同时列为国际标准(目前已达10种),形成一个妥协的结果。
同时,国外各大公司又推出了自己的标准,如LONWORKS、CAN、日本三菱、法国Schneider等,目前多种总线的标准同时存在的局面依然存在,人们所说的开放性和互操作性只能在同一种总线标准下实现,不同标准总线之间仍然受到限制。
不同总线之间的互联性得不到保证,因此人们在努力寻求一种统一标准的现场总线,有人提出了采用TCP/IP协议的以太网。
(2) 系统集成的需求①工业自动化的管控一体化企业信息化是我国的国策,以制造自动化及信息化为例:在需要改变业务流程度的同时,将管理信息系统与电子商务、分散的网络化制造加以集成,把现有的企业资源ERP改造成为基于WEB的应用系统。
目前工业自动化已从单机自动化、工厂自动化,向系统自动化发展,底层的信息要集成到上层的信息网上以实现管控一体化。
现代化生产系统为一个多层的工业控制系统,一般分为三层:• 设备层联接检测设备和执行机构;• 控制层从现场设备取得数据,完成各种控制,监测运行参数,报警和历史趋势分析等;• 信息层将控制系统的各种数据加工后传至上级管理网络(TCP/IP以太网),以便实现管控一体化。
②智能建筑的系统集成城市信息化、数字化的发展、智能建筑(包括智能化住宅小区),已成为数字化城市的信息站点,要实现信息共享,必须实现控制网与信息网的纵向集成,即控制网与TCP/IP的以太网集成。
各子系统(空调、给排水、供电……)由控制网互联再经网关接入TCP/IP以太网,或者各子系统经网关直接接入TCP/IP以太网。
科技外文文献原文

AMBULANT:A Fast,Multi-Platform Open Source SML Player Dick C.A. Bulterman, Jack Jansen, Kleanthis Kleanthous, Kees Blom and Daniel Benden CWI: Centrum voor Wiskunde en InformaticaKruislaan 4131098 SJ Amsterdam, The Netherlands +31 20 592 43 00 Dick.Bulterman@cwi.nl ABSTRACTThis paper provides an overview of the Ambulant Open SMIL player. Unlike other SMIL implementations, the Ambulant Player is a reconfigureable SMIL engine that can be customized for use as an experimental media player core.The Ambulant Player is a reference SMIL engine that can be integrated in a wide variety of media player projects. This paper starts with an overview of our motivations for creating a new SMIL engine then discusses the architecture of the Ambulant Core (including the scalability and custom integration features of the player).We close with a discussion of our implementation experiences with Ambulant instances for Windows,Mac and Linux versions for desktop and PDA devices.Categories and Subject Descriptors H.5.1 Multimedia Information Systems [Evaluation]H.5.4 Hypertext/Hypermedia [Navigation]. General TermsExperimentation, Performance, V erification KeywordsSMIL, Player, Open-Source, Demos1.MOTIV ATIONThe Ambulant Open SMIL Player is an open-source, full featured SMIL 2.0 player. It is intended to be used within the researcher community (in and outside our institute) in projects that need source code access to a production-quality SMIL player environment. It may also be used as a stand-alone SMIL player for applications that do not need proprietary mediaformats.The player supports a range of SMIL 2.0 profiles ( including desktop and mobile configurations) and is available in distributions for Linux, Macintosh, and Windows systems ranging from desktop devices to PDA and handheld computers. While several SMIL player implementationsexist,including the RealPlayer [4], InternetExplorer [5], PocketSMIL [7],GRiNS [6],X-SMILES [8] and various proprietary implementations for mobile devices, we developed Ambulant for three reasons:Permission to make digital or hard copiesof all or part of this work for personal or classroom use is granted without fee provided that copies are not made or distributed for profit or commercial advantage and that copies bear this notice and the full citation on the first page. To copy otherwise, or republish,to post on servers or to redistribute tolists,requires prior specific permissionand/or a fee.'MM' 04, October 10-16, 2004, New Y ork, New Y ork, USA.Copyright 2004 ACM 1-58113-893-8/04/0010...$5.00.•N one of the existi ng SMIL players provides a complete and correct SMIL 2.0 implementation. The Ambulant player implements all of SMIL, based on the SMIL 2.0 Language profile plus extensions to support advanced animation and the needs of the mobile variant used by the 3GPP/PSS-6 SMIL specification [9]. •A ll commercial SMIL players are geared to the presentation of proprietary media. The Ambulant player uses open-source media codecs and open-source network transfer protocols, so that the player can be easily customized foruse in a wide range of researchprojects.• Our goal is to build a platform that will encourage the development of comparable multimedia research output.By providing what we expect will be a standard baseline player, other researchers and developmentorganizations can concentrate on integratingextensions to the basic player (either in terms of new media codecs or new network control algorithms). These extensions can then be shared by others.In contrast to the Helix client architecture [10], which also moved to a GPL core in mid-2004, the Ambulant player supports a wider range of SMIL target application architectures,it provides a more complete and correct implementation of the SMIL language,it provides much better performance on low-resource devices and it provides a more extensible media player architecture. It also provides an implementation that includes all of the media codecs as part of the open client infrastructure.The Ambulant target community is not viewers of media content, but developers of multimedia infrastructures, protocols and networks. Our goal has been to augument the existing partial SMIL implementations produced by many groups with a complete implementation that supports even the exotic features of the SMIL language. The following sections provide an introduction to the architecture of the player and describe the state of the various Ambulant implementations. We then discuss how the Ambulant Core can be re-purposed in other projects. We start with a discussion of Ambulant 's functional support for SMIL.2.FUNCTIONAL SUPPORT FOR SMIL 2.0The SMIL 2.0 recommendation [1] defines 10 functional groups that are used to structure the standard '5s0+ modules. These modules define the approximately 30 XML elements and 150 attributes that make up the SMIL 2.0 language. In addition to defining modules, the SMIL 2.0 specification also defines a number of SMIL profiles: collection of elements, attributes and attribute values that are targeted to meet the needs of a particular implementation community. Common profiles include the full SMIL 2.0 Language, SMIL Basic, 3GPP SMIL,XHTML+SMIL and SMIL 1.0 profiles.A review of these profiles is beyond the scope of this paper(see [2]), but a key concern of Ambulant ' sdevelopment has been to provide a player core that can be used to support a wide range of SMIL target profiles with custom player components.This has resulted in an architecture that allows nearly all aspects of the player to be plug-replaceable via open interfaces. In this way, tailored layout, scheduling, media processing and interaction modules can be configured to meet the needs of individual profile requirements. The Ambulant player is the only player that supports this architecture.The Ambulant player provides a direct implementation of the SMIL 2.0 Language profile, plus extensions that provide enhanced support for animation and timing control. Compared with other commercial and non-commercial players, the Ambulant player implements not only a core scheduling engine, it also provides complete support for SMIL layout,interaction, content control and networking facilities.Ambulant provides the most complete implementation of the SMIL language available to date.3.AMBULANT ARCHITECTUREThis section provides an overview of the architecture of the Ambulant core. While this discussion is high-level, it will provide sufficient detail to demonstrate the applicability of Ambulant to a wide range of projects. The sections below consider thehigh-level interface structure, the common services layer and the player com mon core architecture.3.1The High-Level Interface StructureFigure 1 shows the highest level player abstract ion. The player core support top-level con trol exter nal entry points (in clud ing play/stop/pause) and in turn man ages a collection of external factories that provide in terfaces to data sources (both for sta ndard and pseudo-media), GUI and window system interfaces and in terfaces to ren derers. Unlike other players that treat SMIL as a datatype [4],[10], the Ambula nt en gi ne has acen tral role in in teractio n with the input/output/scree n/devices in terfaces.This architecture allows the types of entry points (and the moment of evaluation) to be customized and separated from the various data-sources and renderers. This is important forintegration with environments that may use non-SMIL layout or special device in terface process ing.Figuit 1 k Ambulaittliigk-ljtwLstruchm.3.2The Common Services LayerFigure 2 shows a set of com mon services that are supplied for the player to operate. These in clude operati ng systems in terfaces, draw ing systems in terfaces and support for baseli ne XML fun ctio ns.All of these services are provided by Ambulant; they may also be integrated into other player-related projects or they may be replaced by new service components that are optimized for particular devices or algorithms. Hsurt 2. Amldant Common [Services Liwr/3.3The Player Common CoreFigure 3 shows a slightly abstracted view ofthe Ambula nt com mon core architecture. The view is essentially that of a single instanceof the Ambula nt player. Although only oneclass object is shown for eachservice,multiple interchangeable implementations have been developed for all objects (except the DOM tree) during theplayer 'development. As an example,multiple schedulers have bee n developed to match the fun cti onalcapabilities of various SMIL profiles.Arrows in the figure denote that one abstract class depends on the services offered by the other abstract class. Stacked boxes denote that a si ngle in sta nce of the player will con tain in sta nces of multiple con crete classes impleme nting that abstract class: one for audio, one for images, etc. All of the stacked-box abstract classes come with a factory function to create the in sta nces of the required con crete class.The bulk of the player implementation is architected to be platform in depe ndent. As we will discuss, this platform in depe ndent component has already been reused for five separate player impleme ntati ons. The platform dependent portions of the player include support for actual ren deri ng, UI in teract ion and datasource processing and control. When the player is active, there is asingle instanee of the scheduler and layout manager, both of which depend on the DOM tree object. Multiple instances of data source and playable objects are created. These in teract with multiple abstract rendering surfaces. The playable abstract class is the scheduler in terface (play, stop) for a media no de, while the renderer abstract class is the drawing in terface (redraw). Note that not all playables are ren derers (audio, SMIL ani mati on). The architecture has bee n desig ned to have all comp onents be replaceable, both in terms of an alter native impleme ntati on of a give n set of functionality and in terms of a complete re-purposing of the player components. In this way, the Ambulant core can be migrated to being a special purpose SMIL engine or a non-SMIL engine (such as support for MPEG-4 or other sta ndards).The abstract in terfaces provided by the player do not require a “ SMIL on Top” model of docume nt process ing. The abstract in terface can be used with other high-level control 4.1 Implementation PlatformsSMIL profiles have been defined for a widerange of platforms and devices, ranging fromdesktop implementations to mobile devices. Inorder to support our research on distributedmodels (such as in an XHTML+SMIL implementation), or to control non-SMILlower-level rendering (such as timed text).Note that in order to improve readability of theillustrati on, all auxiliary classes (threadi ng, geometry and color han dli ng, etc.) and several classes that were not important for general un dersta nding (player driver engine, transitions, etc.) have been left out of the diagram.4. IMPLEMENTATION EXPERIENCESThis sectio nwill briefly review ourimpleme ntatio n experie nces with theAmbula nt player. We discuss the implementation platforms used during SMIL ' s development and describe a set of test documents that were created to test the fun cti on ality of the Ambula nt player core. We con clude with a discussi on on the performa nee of the Ambula nt player.SMIL document extensions and to provide a player that was useful for other research efforts, we decided to provide a wide range of SMIL implementations for the Ambulant project. The Ambulant core is available as a single C++ source distribution that provides support for the following platforms:•Linux: our source distributi on in elude makefiles that are used with the RH-8 distribution of Linux. We provide support for media using the FF-MPEG suite [11]. The player interface is built using the Qt toolkit [12]. •Macintosh:Ambulant supports Mac OS X 10.3. Media rendering support is available via the internal Quicktime API and via FF-MPEG . The player user interface uses standard Mac conventions and support (Coca). •Windows: Ambulant provides conventional Win32 support for current generation Windows platforms. It has been most extensivelytested with XP (Home,Professional and TabletPC) and Windows-2000. Media rendering include third-party and local support for imaging and continuous media. Networking and user interface support are provided using platform-embeddedlibraries.•PocketPC: Ambulant supports PocketPC-2000,PocketPC-2002andWindows Mobile 2003 systems. The PocketPC implementations provide support for basic imaging, audio and text facilities.•Linux PDA support:Ambulant provides support for the Zaurus Linux-PDA. Media support is provided via the FF-MPEG library and UI support is provide via Qt. Media support includes audio, images and simple text.In each of these implementations, our initial focus has been on providing support for SMIL scheduling and control functions.We have not optimized media renderer support in the Ambulant 1.0 releases, but expect to provide enhanced support in future versions. 4.2 Demos and Test SuitesIn order to validate the Ambulant player implementation beyond that available with the standard SMIL test suite [3], several demo and test documents have been distributed with the player core. The principal demos include: •Welcome: A short presentation that exercises basic timing,media rendering, transformations and animation.•NYC: a short slideshow in desktop and mobile configurations that exercises scheduling, transformation and media rendering.•News: a complex interactive news document that tests linking, event-based activation, advanced layout, timing and media integration. Like NYC, this demo support differentiated mobile and desktop configurations.•Links: a suite of linking and interaction test cases.•Flashlight: an interactive user'sguide that tests presentation customization using custom test attributes and linking/interaction support. These and other demos are distributed as part of the Ambulant player web site [13].4.3Performance EvaluationThe goal of the Ambulant implementation was to provide a complete and fast SMIL player. We used a C++ implementation core instead of Java or Python because our experience had shownthat on small devices (which we feel hold significant interest for future research), the efficiency of the implementation still plays a dominant role. Our goal was to be able to read, parse, model and schedule a 300-node news presentation in less than two seconds on desktop and mobile platforms. This goal was achieved for all of the target platforms used in the player project. By comparison, the same presentation on the Oratrix GRiNS PocketPC player took 28 seconds to read, parse and schedule. (The Real PocketPC SMIL player and the PocketSMIL players were not able to parseand schedule the document at all because of their limited SMIL language support.)In terms of SMIL language performance, our goal was to provide a complete implementation of the SMIL 2.0 Language profile[14]. Where other players have implemented subsets of this profile,Ambulant has managed to implement the entire SMIL 2.0 feature set with two exceptions: first, we currently do not support the prefetch elements of the content control modules; second, we provide only single top-level window support in the platform-dependent player interfaces. Prefetch was not supported because of the close association of an implementation with a given streaming architecture. The use of multiple top-level windows, while supported in our other SMIL implementation, was not included in version 1.0 of Ambulant because of pending working on multi-screen mobile devices. Both of these feature are expected to be supported in the next release of Ambulant.5.CURRENT STATUS AND AVAILABILITYT his paper describes version 1.0 of the Ambulant player, which was released on July 12, 2004. (This version is also known as the Ambulant/O release of the player.) Feature releases and platform tuning are expected to occur in the summer of 2004. The current release of Ambulant is always available via our SourceForge links [13], along with pointers to the most recent demonstrators and test suites.The W3C started its SMIL 2.1 standardization in May, 2004.At the same time, the W3C' s timed text working group is completing itsfirst public working draft. We will support both of these activities in upcoming Ambulant releases.6.CONCLUSIONSWhile SMIL support is becoming ubiquitous (in no small part due to its acceptance within the mobile community), the availability of open-source SMIL players has been limited. This has meant that any group wishing to investigate multimedia extensions or high-/low-level user or rendering support has had to make a considerable investment in developing a core SMIL engine.We expect that by providing a high-performance, high-quality and complete SMIL implementation in an open environment, both our own research and the research agendas of others can be served. By providing a flexible player framework, extensions from new user interfaces to new rendering engines or content control infrastructures can be easily supported.7.ACKNOWLEDGEMENTS This work was supported by the Stichting NLnet in Amsterdam.8.REFERENCES[1]W3C,SMIL Specification,/AudioVideo.[2]Bulterman,D.C.A and Rutledge, L.,SMIL 2.0:Interactive Multimedia for Weband Mobile Devices, Springer, 2004.[3]W3C,SMIL2.0 Standard Testsuite,/2001/SMIL20/testsuite/[4]RealNetworks,The RealPlayer 10,/[5]Microsoft,HTML+Time in InternetExplorer 6,/workshop/author/behaviors/time.asp[6]Oratrix, The GRiNS 2.0 SMIL Player./[7]INRIA,The PocketSMIL 2.0 Player,wam.inrialpes.fr/software/pocketsmil/. [8],X-SMILES: An Open XML-Browser for ExoticApplications./[9]3GPP Consortium,The Third-GenerationPartnership Project(3GPP)SMIL PSS-6Profile./ftp/Specs/archive/26_series/26.246/ 26246-003.zip[10]Helix Community,The Helix Player./.[11]FFMPEG ,FF-MPEG:A Complete Solution forRecording,Converting and Streaming Audioand Video./[12]Trolltech,Qtopia:The QT Palmtop/[13]Ambulant Project,The Ambulant 1.0 Open Source SMIL 2.0Player, /.[14]Bulterman,D.C.A.,A Linking andInteraction Evaluation Test Set for SMIL,Proc. ACM Hypertext 2004, SantaCruz,August, 2004.。
英文文献 科技类 原文及翻译 (电子 电气 自动化 通信…)74
英文文献科技类原文及翻译(电子电气自动化通信…)74ArticleCreating a Debugging and Profiling Agent with JVMTIArticles IndexThe Java Virtual Machine Tool Interface (JVMTI) provides a programming interface that allowsyou, the software developer, to create software agents that can monitor and control your Javaprogramming language applications. JVMTI is new in the Java 2 Software Development Kit(SDK), Standard Edition, version 1.5.0. It replaces the Java Virtual Machine Profiling Interface(JVMPI), which had been included as an experimental feature of the Java 2 SDK since version1.1. JVMTI is described in JSR-163.This article illustrates how to use JVMTI to create a debugging and profiling tool for Java applications. Such a tool, also called an agent, uses the functionality exposed by the interfaceto register for notification of events as they occur in the application, and to query and controlthe application. JVMTI documentation is available here. A JVMTIagent can be useful for debugging and tuning an application. It can illustrate aspects of the application, such asmemory allocation, CPU utilization, and lock contention.Even though JVMPI is experimental, it is being used by many Java technology developers, and inseveral commercially-available Java application profilers. Pleasenote that developers are strongly encouraged to use JVMTI instead of JVMPI. JVMPI will be discontinued in the very near future.JVMTI improves upon the functionality and performance of JVMPI in many ways. For example:JVMTI relies on a callback for each event. This is more efficientthan the JVMPI design of usingevent structures, which needed to be marshalled and unmarshalled.JVMTI contains four times as many functions as JVMPI (including many more functions toobtain information about variables, fields, methods, and classes).For a complete index of the JVMTIfunctions, see the Function Index page.JVMTI provides notification for more types of events than does JVMPI, including exceptionevents, field access and modification events, and breakpoint and single-step events.Some of the JVMPI events that were never fully utilized, such as arena new and delete, or thatcan be better obtained through bytecode instrumentation, or the JVMTI functions themselves, (suchas heap dump and object allocation) have been dropped. A description of the events is available atthe Event Index page.JVMTI is capability-based, whereas JVMPI was "all or nothing" with corresponding performance impact.JVMPI heap functionality did not scale.JVMPI had no error return information.JVMPI was deeply invasive on VM implementations with resulting maintenance issues andperformance impacts.JVMPI is experimental and will be discontinued very soon.In the remainder of this article, we present a simple agent that uses JVMTI functions to extractinformation from a Java application. The agent must be written in native code. The sampleagent shown here is written in the C programming language. You can download the complete sample agent code here. The following paragraphs describe how an agent is initialized, andhow the agent uses JVMTI functions to extract information about a Java application, as well ashow to compile and run the agent. The sample code and compilation steps are specific toUNIX environments, but can be modified for use with Windows. Theagent described here can be used to analyze the threads and to determine JVM memory usage in any Java application.A simple program written in the Java programming language, called SimpleThread.java, is included and can be downloaded here. We use ThreadSample.java to demonstrate the expected output from the agent.The functionality of JVMTI is much more extensive than we can detail here, but the codein this article should provide a starting place for developing profiling tools to meet your ownspecific needs.Agent InitializationThis section describes the code that is used to initialize the agent. To begin with, the agent must include the jvmti.h file with the statement: #include <jvmti.h>.In addition, the agent must contain a function called Agent_OnLoad, which is invoked when the library is loaded. The Agent_OnLoad functionis used to set up functionality that is1required prior to initializing the Java virtual machine (JVM). The Agent_OnLoad signature looks like this:JNIEXPORT jint JNICALL Agent_OnLoad(JavaVM *jvm, char *options, void *reserved) {.../* We return JNI_OK to signify success */return JNI_OK;}In our sample code, we must enable several capabilities for theJVMTI functions andevents that we will be using. It is generally desired, and in some cases required, to add these capabilities in the Agent_OnLoad function. The capabilities necessary for each function orevent are described in the Java Virtual Machine Tool Interface pages. For example, to use the InterruptThread function, the can_signal_thread capability must be true. We set all of the capabilities needed for our sample code to true, and then add them to the JVMTI environment using the AddCapabilities function:static jvmtiEnv *jvmti = NULL;static jvmtiCapabilities capa;jvmtiError error;...(void)memset(&capa, 0, sizeof(jvmtiCapabilities));capa.can_signal_thread = 1;capa.can_get_owned_monitor_info = 1;capa.can_generate_method_entry_events = 1;capa.can_generate_exception_events = 1;capa.can_generate_vm_object_alloc_events = 1;capa.can_tag_objects = 1;error = (*jvmti)->AddCapabilities(jvmti, &capa);check_jvmti_error(jvmti, error, "Unable to get necessary JVMTIcapabilities.");...In addition, the Agent_OnLoad function is often used to register for notification of events. Inour sample code, we enable several events, such as VM Initialization Event, VM Death Event, andVM Object Allocation, in Agent_OnLoad with the SetEventNotificationMode function as follows:error = (*jvmti)->SetEventNotificationMode(jvmti, JVMTI_ENABLE, JVMTI_EVENT_VM_INIT, (jthread)NULL);error = (*jvmti)->SetEventNotificationMode(jvmti, JVMTI_ENABLE, JVMTI_EVENT_VM_DEATH, (jthread)NULL);error = (*jvmti)->SetEventNotificationMode(jvmti, JVMTI_ENABLE, JVMTI_EVENT_VM_OBJECT_ALLOC, (jthread)NULL);check_jvmti_error(jvmti, error, "Cannot set event notification");...Note that in our example, NULL is passed as the third parameter, which enables the eventnotification globally. If desired, some events can be enabled or disabled for a particular thread.Each event for which we register must also have a designatedcallback function, which willbe called when the event occurs. For example, if a JVMTI Event oftype Exception occurs, our example agent sends it to the callback method, callbackException().This is done using the jvmtiEventCallbacks structure and SetEventCallbacks function:jvmtiEventCallbacks callbacks;...(void)memset(&callbacks, 0, sizeof(callbacks));callbacks.VMInit = &callbackVMInit; /* JVMTI_EVENT_VM_INIT */callbacks.VMDeath = &callbackVMDeath; /* JVMTI_EVENT_VM_DEATH */callbacks.Exception = &callbackException;/* JVMTI_EVENT_EXCEPTION */ callbacks.VMObjectAlloc = &callbackVMObjectAlloc;/*JVMTI_EVENT_VM_OBJECT_ALLOC */error = (*jvmti)->SetEventCallbacks(jvmti,&callbacks,(jint)sizeof(callbacks));check_jvmti_error(jvmti, error, "Cannot set jvmti callbacks");We also set up a global agent data area for use throughout our code. /* Global agent data structure */typedef struct {/* JVMTI Environment */jvmtiEnv *jvmti;jboolean vm_is_started;/* Data access Lock */jrawMonitorID lock;} GlobalAgentData;static GlobalAgentData *gdata;In the Agent_OnLoad function, we perform the following setup:/* Setup initial global agent data area* Use of static/extern data should be handled carefully here. * We need to make sure that we are able to cleanup after * ourselves so anything allocated in this library needs to be * freed in theAgent_OnUnload() function.*/static GlobalAgentData data;(void)memset((void*)&data, 0, sizeof(data));gdata = &data;/* Here we save the jvmtiEnv* for Agent_OnUnload(). */ gdata->jvmti = jvmti;...We create a raw monitor in Agent_OnLoad(), then wrap the code ofVM_INIT, VM_DEATH and EXCEPTION with JVMTI RawMonitorEnter() and RawMonitorExit() interfaces. /* Here we create a raw monitor for our use in this agent to* protect critical sections of code. */error = (*jvmti)->CreateRawMonitor(jvmti, "agent data", &(gdata->lock));/* Enter a critical section by doing a JVMTI Raw Monitor Enter */ static voidenter_critical_section(jvmtiEnv *jvmti){ jvmtiError error;error = (*jvmti)->RawMonitorEnter(jvmti, gdata->lock);check_jvmti_error(jvmti, error, "Cannot enter with raw monitor");}/* Exit a critical section by doing a JVMTI Raw Monitor Exit */static voidexit_critical_section(jvmtiEnv *jvmti){ jvmtiError error;error = (*jvmti)->RawMonitorExit(jvmti, gdata->lock);check_jvmti_error(jvmti, error, "Cannot exit with raw monitor");}Agent_OnUnload will be called by the VM when the agent is about tobe unloaded. Thisfunction is used to clean-up resources allocated during Agent_OnLoad. /* Agent_OnUnload: This is called immediately before the shared library * is unloaded. This is the last code executed.*/JNIEXPORT void JNICALL Agent_OnUnload(JavaVM *vm){/* Make sure all malloc/calloc/strdup space is freed */}Analyzing Threads Using JVMTIThis section describes how to obtain information about user threads running in the JVM. Aswe have discussed, when the JVM is started, the startup function Agent_OnLoad in the JVMTIJVMTI_EVENT_VM_INIT is generated and sent to the callbackVMInit routine in our agent code. agent library is invoked. During VM initialization, a JVMTI Event of type Once the VM initialization event is received (that is, the VMInit callback is invoked), the agent can complete its initialization. Now, the agent is free to call any Java Native Interface (JNI) orJVMTI function. At this time, we are in the live phase and we will enable the Exception events(JVMTI_EVENT_EXCEPTION) in this VMInit callback routine. error = (*jvmti)->SetEventNotificationMode(jvmti, JVMTI_ENABLE, JVMTI_EVENT_EXCEPTION, (jthread)NULL);Exception events are generated whenever an exception is first detected in a Javaprogramming language method. The exception may have beenthrown by a Java programminglanguage or native method, but in the case of native methods, the event is not generated until theexception is first seen by a Java programming language method. If an exception is set and clearedin a native method, no exception event is generated.For the purpose of demonstration, the sample Java application used is shown below. Themain thread creates five threads, each of which throws an exception before exiting. Once theJVM is started, a JVMTI_EVENT_VM_INIT is generated and sent to the agent code forprocessing, as we have enabled VMInit and Exception events in our agent code. Later, when our Java thread throws an exception, aJVMTI_EVENT_EXCEPTION is sent to the agent code. The agent code then analyzes the thread information, and displays the current thread name, the thread group it belongs to, monitors owned by this thread, thread state, thread stack trace,and all the user threads in the JVM.public class SimpleThread {static MyThread t;public static void main(String args[]) throws Throwable{t = new MyThread();System.out.println("Creating and running 10 threads...");for(int i = 0; i < 5; i++) {Thread thr = new Thread(t,"MyThread"+i);thr.start();try {thr.join();} catch (Throwable t) {}}}}class MyThread implements Runnable {Thread t;public MyThread() {}public void run() {/* NO-OP */try {"a".getBytes("ASCII");throwException();Thread.sleep(1000);} catch (ng.InterruptedException e){e.printStackTrace();} catch (Throwable t) {}}public void throwException() throws Throwable{throw new Exception("Thread Exception from MyThread"); }}Let us take a look at the JVMTI agent code that is executed when an exception is thrown inside a Java application.throw new Exception("Thread Exception from MyThread");A JVMTI exception event is generated and sent to the Exception callback routine in our agent code. The agent must add the capability can_generate_exception_events to enable the exception event. We use the JVMTI GetMethodName interface to display the method name and signature of the routine from which the exception was generated.err3 = (*jvmti)->GetMethodName(jvmti, method, &name, &sig, &gsig);printf("Exception in Method:%s%s\n", name, sig);We use the JVMTI GetThreadInfo and GetThreadGroupInfo interfaces to display the current thread and group details.err = (*jvmti)->GetThreadInfo(jvmti, thr, &info);if (err == JVMTI_ERROR_NONE) {err1 = (*jvmti)->GetThreadGroupInfo(jvmti,info.thread_group,&groupInfo);...if ((err == JVMTI_ERROR_NONE) && (err1 == JVMTI_ERROR_NONE )){printf("Got Exception event, Current Thread is : %s and Thread Group is: %s\n",((==NULL) ? "": ), );}}This causes the following to be output on your terminal:Got Exception event, Current Thread is : MyThread0 and Thread Group is: mainWe can get information about the monitors owned by the specified thread by using the JVMTI GetOwnedMonitorInfo interface. This function does not require the thread to besuspended.err = (*jvmti)->GetOwnedMonitorInfo(jvmti, thr, νm_monitors,&arr_monitors);printf("Number of Monitors returned : %d\n", num_monitors);We can get state information for a thread using the JVMTI GetThreadState interface. The thread state can be one of the following values:Thread has been TerminatedThread is AliveThread is runnableThread sleepingThread is waiting for NotificationThread is in Object WaitThread is in NativeThread is SuspendedThread is Interruptederr = (*jvmti)->GetThreadState(jvmti, thr, &thr_st_ptr);if ( thr_st_ptr & JVMTI_THREAD_STATE_RUNNABLE ) {printf("Thread: %s is Runnable\n", ((==NULL) ? "" :));flag = 1;}Displaying All User Threads in the JVM Using JVMTIThe JVMTI function GetAllThreads is used to display all live threads known to the JVM. Thethreads are Java programming language threads attached to the VM. The following code illustrates this:/* Get All Threads */err = (*jvmti)->GetAllThreads(jvmti, &thr_count, &thr_ptr); if(err != JVMTI_ERROR_NONE) {printf("(GetAllThreads) Error expected: %d, got: %d\n",JVMTI_ERROR_NONE, err);describe(err);printf("\n");}if (err == JVMTI_ERROR_NONE && thr_count >= 1) {int i = 0;printf("Thread Count: %d\n", thr_count);for ( i=0; i < thr_count; i++) {/* Make sure the stack variables are garbage free */(void)memset(&info1,0, sizeof(info1));err1 = (*jvmti)->GetThreadInfo(jvmti, thr_ptr[i], &info1);if (err1 != JVMTI_ERROR_NONE) {printf("(GetThreadInfo) Error expected: %d, got: %d\n",JVMTI_ERROR_NONE, err1);describe(err1);printf("\n");}printf("Running Thread#%d: %s, Priority: %d, context class loader:%s\n",i+1,,info1.priority,(info1.context_class_loader == NULL ? ": NULL" : "Not Null"));/* Every string allocated by JVMTI needs to be freed */ err2 =(*jvmti)->Deallocate(jvmti, (void*));if (err2 != JVMTI_ERROR_NONE) {printf("(GetThreadInfo) Error expected: %d, got: %d\n",JVMTI_ERROR_NONE, err2);describe(err2);printf("\n");}}}This causes the following to be output on your terminal:Thread Count: 5Running Thread#1: MyThread4, Priority: 5, context class loader:Not NullRunning Thread#2: Signal Dispatcher, Priority: 10, context class loader:NotNullRunning Thread#3: Finalizer, Priority: 8, context class loader:: NULL Running Thread#4: Reference Handler, Priority: 10, context class loader:: NULLRunning Thread#5: main, Priority: 5, context class loader:Not Null Obtaining a JVM Thread StacktraceThe JVMTI interface GetStackTrace can be used to get information about the stack of athread. If max_count is less than the depth of the stack, themax_count number of deepest frames are returned, otherwise the entire stack is returned. The thread need not be suspendedto call this function.The following example causes up to five of the deepest frames to be returned. If there areany frames, the currently executing method name is also printed./* Get Stack Trace */err = (*jvmti)->GetStackTrace(jvmti, thr, 0, 5, &frames, &count);if (err != JVMTI_ERROR_NONE) {printf("(GetThreadInfo) Error expected: %d, got: %d\n",JVMTI_ERROR_NONE, err);describe(err);printf("\n");}printf("Number of records filled: %d\n", count);if (err == JVMTI_ERROR_NONE && count >=1) {char *methodName;methodName = "yet_to_call()";char *declaringClassName;jclass declaring_class;int i=0;printf("Exception Stack Trace\n");printf("=====================\n");printf("Stack Trace Depth: %d\n", count);for ( i=0; i < count; i++) {err = (*jvmti)->GetMethodName(jvmti, frames[i].method, &methodName, NULL, NULL);if (err == JVMTI_ERROR_NONE) {err = (*jvmti)->GetMethodDeclaringClass(jvmti,frames[i].method, &declaring_class);err = (*jvmti)->GetClassSignature(jvmti, declaring_class, &declaringClassName, NULL);if (err == JVMTI_ERROR_NONE) {printf("at method %s() in class %s\n", methodName, declaringClassName);}}}This causes the following to be output on your terminal: Number of records filled: 3Thread Stack Trace=====================Stack Trace Depth: 3at method throwException() in class LmyThread; at method run() in class LMyThread;at method run() in class Ljava/lang/Thread;Analyzing the Heap Using JVMTIThis section describes the portion of the sample code thatillustrates how to obtaininformation about heap usage. For example, we have registered for VM Object Allocationevents as described in the section titled "Agent Initialization". This will notify us when the JVMhas allocated an object that is visible to the Java programming language, and which is notdetectable by other instrumentation mechanisms. This is an important difference from JVMPI,which sent an event when any object was allocated. In JVMTI, no event is sent foruser-allocated objects, since it is expected that bytecode instrumentation can be used instead.For example, in the SimpleThread.java program, we will not be notified of the allocation ofMyThread or Thread objects. An article demonstrating the use of bytecode instrumentation to obtain this information will be published separately.The VM Object Allocation event is useful for determining information about objectsallocated by the JVM. In the Agent_OnLoad method, we registered callbackVMObjectAllocas the function to be called when the VM Object Allocation event was sent. The callbackfunction parameters contain information about the object that has been allocated, such as theJNI local reference to the class of the object and the object size. With the jclass parameter, object_klass, we can use the GetClassSignature function to obtain information about the name of the class. We can print the object class and its size as shown below. Note that toavoid excessive output, we only print information about objects that are greater than 50 bytes./* Callback function for VM Object Allocation events */static void JNICALL callbackVMObjectAlloc(jvmtiEnv *jvmti_env, JNIEnv* jni_env, jthread thread,jobject object, jclass object_klass, jlong size) {...char *className;...if (size > 50) {err = (*jvmti)->GetClassSignature(jvmti, object_klass, &className, NULL);if (className != NULL) {printf("\ntype %s object allocated with size %d\n", className, (jint)size);}...We use the GetStackTrace method as described above to print thestack trace of the thread that is allocating the object. As that section describes, we obtain frames to a specified depth. The frames are returned as jvmtiFrameInfo structures, which contain each frame's jmethodID (that is, frames[x].method). The GetMethodName functioncan map the jmethodID to that particular method's name. Finally, in this example, we also use the GetMethodDeclaringClass and GetClassSignature functions to obtain the name of the class from which the method was called.char *methodName;char *declaringClassName;jclass declaring_class;jvmtiError err;//print stack tracejvmtiFrameInfo frames[5];jint count;int i;err = (*jvmti)->GetStackTrace(jvmti, NULL, 0, 5, &frames, &count);if (err == JVMTI_ERROR_NONE && count >= 1) {for (i = 0; i < count; i++) {err = (*jvmti)->GetMethodName(jvmti, frames[i].method, &methodName, NULL, NULL);if (err == JVMTI_ERROR_NONE) {err = (*jvmti)->GetMethodDeclaringClass(jvmti, frames[i].method,&declaring_class);err = (*jvmti)->GetClassSignature(jvmti, declaring_class,&declaringClassName, NULL);if (err == JVMTI_ERROR_NONE) {printf("at method %s in class %s\n", methodName, declaringClassName);}}}}...Note that memory allocated to the char arrays by these functions should be freed when weare finished with them:err = (*jvmti)->Deallocate(jvmti, (void*)className);err = (*jvmti)->Deallocate(jvmti, (void*)methodName);err = (*jvmti)->Deallocate(jvmti, (void*)declaringClassName);...The output from this code will look like this:type Ljava/lang/reflect/Constructor; object allocated with size 64at method getDeclaredConstructors0 in class Ljava/lang/Class; at method privateGetDeclaredConstructors in class Ljava/lang/Class; at method getConstructor0 in class Ljava/lang/Class; at method getDeclaredConstructor in class Ljava/lang/Class; at method run in class Ljava/util/zip/ZipFile$1;The returned name for primitive classes is the type signature character of the correspondingprimitive type. For example, ng.Integer.TYPE is "I". In our callback method for VM Object Allocation, we also use the IterateOverObjectsReachableFromObject function to demonstrate how we can obtainadditional information about the heap. In our example, we pass as a parameter the JNIreference to the object that was just allocated, and the functionwill iterate over all objects thatare directly and indirectly reachable from this newly allocated object. For each object that isreachable, another callback function is defined which can describe that reachable object. Inour example, the callback function passed to the IterateOverObjectsReachableFromObject function is calledreference_object:err = (*jvmti)->IterateOverObjectsReachableFromObject(jvmti, object, &reference_object, NULL);if ( err != JVMTI_ERROR_NONE ) {printf("Cannot iterate over reachable objects\n");}...The reference_object function is defined as follows:/* JVMTI callback function. */static jvmtiIterationControl JNICALLreference_object(jvmtiObjectReferenceKind reference_kind,jlong class_tag, jlong size, jlong* tag_ptr,jlong referrer_tag, jint referrer_index, void *user_data) {...return JVMTI_ITERATION_CONTINUE;}...In our example, we use the IterateOverObjectsReachableFromObject function to calculate both the combined size of all objects reachable from the newly allocated objects, as wellas what types of objects they are. The object type is determinedfrom the reference_kindparameter. We then print this information to receive output similar to the following: This object has references to objects of combined size 21232 This includes 45 classes, 9 fields, 1 arrays, 0 classloaders, 0 signers arrays, 0 protection domains, 19 interfaces, 13 static fields, and 2 constant pools.Note that similar iteration functions available in JVMTI allow youto iterate over the entireheap (both reachable and unreachable objects), over the root objects and all objects that aredirectly and indirectly reachable from the root objects, or over all objects in the heap that areinstances of a specified class. The technique for these functions is similar to that describedpreviously. During the execution of these functions, the state ofthe heap does not change: noobjects are allocated, no objects are garbage collected, and the state of objects (including held values) does not change. As a result, threads executing Java programming language code, threadsattempting to resume the execution of Java programming language code, and threads attempting toexecute JNI functions, are typically stalled. In the objectreference callback functions, no JNIfunctions can be used, and no JVMTI functions can be used exceptthose which are specificallyallowed.Compiling and Executing the Sample CodeTo compile and run the code for the sample application described here, do the following:1. Set JDK_PATH to point to the J2SE 1.5 distribution.JDK_PATH="/home/xyz/j2sdk1.5.0/bin"2.3. Build the shared library using the C compiler. We used Sun Studio 8 C compiler.CC="/net/compilers/S1Studio_8.0/SUNWspro/bin/cc"echo "...creating liba.so"${CC} -G -KPIC -o liba.so-I${JDK_PATH}/include -I${JDK_PATH}/include/solaris a.c4.5. To load and run the agent library, you can use one of thefollowing command-line argumentsduring VM startup.-agentlib:<jvmti-agent-library-name>-agentpath:/home/foo/jvmti/<jvmti-agent-library-name> 6. and thenyou can run the sample Java application as follows:echo "...creating SimpleThread.class"${JDK_PATH}/bin/javac -g -d . SimpleThread.javaecho "...running SimpleThread.class"LD_LIBRARY_PATH=. CLASSPATH=. ${JDK_PATH}/bin/java -showversion -agentlib:aSimpleThread7.Note: The sample agent code was built and tested on Solaris 9 Operating System. ConclusionIn this article we demonstrated some of the interfaces that JVMTI provides for monitoring andmanagement of the JVM. The JVMTI specification (JSR-163) is intended to provide a VMinterface for the full breadth of tools that need access to VM state, including but not limited to: profiling, debugging, monitoring, thread analysis, and coverage analysis tools. Developers are advised not to use JVMPI interfaces to develop tools or debuggingutilities, as JVMPI is unsupported and experimental technology.JVMTI should beconsidered for writing any profiling and managing tools for Java virtual machines.See Also。
英文文献科技类原文及翻译

本科毕业设计(论文)外文翻译姓名: 王文超学号: 200715010220专业: 电气工程及其自动化班级: 电气071502指导教师: 智泽英职称:副教授日期: 2011年6月12日电子信息工程学院The basics of Computer Numerical ControlWhile the specific intention and application for CNC machines vary from machine type toanother, all forms of CNC have common benefits. Though the thrust of this presentation is to teach you CNC usage, it helps to understand why these sophisticated machines have become so popular. Here are but a few of the more important benefits offered by CNC equipment.The first benefit offered by all forms of CNC machine tools is improved automation. The operator intervention related to producing workpieces can be reduced or eliminated. Many CNC machines can run unattended during their entire machining cycle, freeing the operator to do other tasks. This gives the CNC user several side benefits including reduced operator fatigue, fewer mistakes caused by human error, and consistent and predictable machining time for each workpiece. Since the machine will be running under program control, the skill level required of the a CNC operator (related to basic machining practice) is also reduced as compared to a machinist producing workpieces with conventional machine tools.The second major benefit of CNC technology is consistent and accurate workpieces. Today’s CNC machines boast almost unbelievable accuracy and repeatability specifications. This means that once a program is verified, two, ten, or one thousand identical workpieces can be easily produced with precision and consistency.A third benefit offered by most forms of CNC machine tools is flexibility. Since these machines are run from programs, running a different workpiece is almost as easy as loading a different program. Once a program has been verified and executed for one production run, it can be easily recalled the next time the workpiece is to be run. This leads to yet another benefit, fast change-overs. Since these machines are very easy to setup and run, and since programs can be easily loaded, they allow very short setup time. This is imperative with today’s Just-In-Time product requirements.1. Motion control-the heart of CNCThe most basic function of any CNC machine is automatic, precise, and consistent motion. Rather than applying completely mechanicaldevices to cause motion as is required on most conventional machine tools, CNC machines allow motion control in a revolutionary manner. All forms of CNC equipment have two or more directions of motion, called axes. These axes can be precisely and automatically positioned alongtheir lengths of travel. The two most common axis types are linear (driven along a straight path) and rotary (driven along a circular path).Instead of causing motion by turning cranks and handwheels as is required on conventional machine tools, CNC machines allow motions to be commanded through programmed commands. Generally speaking, the motion type (rapid, linear, and circular), the axes to move, the amount of motion and the motion rate (feedrate) are programmable with almost all CNC machine tools.Accurate positioning is accomplished by the operator counting the number of revolutions made on the handwheel plus the graduations on the dial. The drive motor is rotated a corresponding amount, which in turn drives the ball screw, causing linear motion of the axis. A feedback device confirms that the proper amount of ball screw revolutions has occurred.A CNC command executed within the control (commonly through a program) tells the drive motor to rotate a precise number of times. The rotation of the drive motor in turn rotates the ball screw. And the ball screw causes drives the linear axis. A feedback device at the opposite end of the ball screw allows the control to confirm that the commanded number of rotations has taken place.Though a rather crude analogy, the same basic linear motion can be found on a common table vise. As you rotate the vise crank, you rotate a lead screw that, in turn, drives the movable jaw on the vise. By comparison, a linear axis on a CNC machine tool is extremely precise. The number of revolutions of the axis drive motor precisely controls the amount of linear motion along the axis.How axis motion is commanded-understanding coordinate systems. It would be infeasible for the CNC user to cause axis motion by trying to tell each axis drive motor how many times to rotate in order to command a given linear motion amount. (This would be like having to figure out how many turns of the handle on a table vise will cause the movable jaw to move exactly one inch!) Instead, all CNC controls allow axis motion to be commanded in a much simpler and more logical way by utilizing some form of coordinate system. The two most popular coordinate systems used with CNC machines are the rectangular coordinate system and the polar coordinate system. By far, the move popular of these two is the rectangular coordinate system, and we’ll use it for all discussions made during this presentation.。
一篇英语科技文献摘要范文

一篇英语科技文献摘要范文Title: "Advancements in Quantum Computing: Exploring the Frontier of Superposition and Entanglement for Solving Complex Problems"Abstract:Quantum computing, a revolutionary paradigm that harnesses the unique properties of quantum mechanics, has emerged as a promising field with the potential to transform various sectors from materials science to cryptography. This article delves into the recent advancements in quantum computing, focusing on two fundamental principles: superposition and entanglement, and their applications in solving classically intractable problems.First, we provide an overview of the theoretical foundations of quantum computing, emphasizing the concept of a qubit—the quantum equivalent of a classical bit—which can exist in a superposition of states, enabling parallel computation. This inherent parallelism is then leveraged to explain how quantum algorithms, such as Grover's search algorithm and Shor's factorization algorithm, can achieve exponential speedups over their classical counterparts.Next, we explore the realm of quantum entanglement, a phenomenon where the states of two or more quantum particles become intricately linked, such that measurements on one particle instantaneously affect the state of the others, regardless of the distance between them. This non-local correlation is a cornerstone of quantum computing, enabling complex information processing tasks that would be impossible with classical systems.The article then highlights recent experimental breakthroughs in quantum hardware, including the development of more stable and scalable qubit platforms like superconducting qubits, trapped ions, and topological quantum bits. These advancements have paved the way for the realization of quantum processors with increasing numbers of qubits, enabling the execution of increasingly complex quantum circuits.Furthermore, we discuss the challenges and opportunities in quantum error correction, a crucial aspect of realizing fault-tolerant quantum computers capable of executing algorithms with high fidelity. Recent progress in quantum error-correcting codes and their implementation strategies are presented, outlining how they can mitigate the detrimental effects of decoherence and other noise sources in quantum systems.Finally, we explore the potential impact of quantum computing on various industries, including drug discovery, optimization problems, finance, and cryptography. We discuss how quantum algorithms tailored for these domains can unlock new capabilities and drive innovation, while also acknowledging the ethical and societal implications of this technology's development.In conclusion, this article offers a comprehensive overview of the latest advancements in quantum computing, emphasizing the fundamental principles, experimental progress, and potential applications that are poised to reshape our understanding of computation and its impact on society.。
一篇英语科技文献摘要范文

一篇英语科技文献摘要范文Abstract:With the rapid development of technology, the impact of artificial intelligence (AI) on society has become increasingly apparent. This paper presents a comprehensive overview of the current state of AI technology, its potential impact on society, and the ethical considerations that must be taken into account. The paper begins by discussing the various applications of AI, including in healthcare, finance, and transportation. It then explores the potential impact of AI on the job market, as well as the ethical implications of using AI in decision-making processes. The paper also examines the potential risks and challenges associated with the widespread adoption of AI technology, including privacy concerns and the potentialfor AI to be used for malicious purposes. Finally, the paper discusses the need for ethical guidelines and regulations to govern the development and use of AI technology.摘要:随着技术的快速发展,人工智能对社会的影响变得越来越明显。
英语科技文双语版

科技文1.单心室辅助人工心脏应用于实验动物山羊,存活11天又23小时。
在存活期间,动物心电图,中心静脉压,呼吸,体温等参数基本正常。
石泵分流量可调,驱动装置连续工作11天,性能稳定可靠。
动物死后的病理解剖表明,死亡的主要原因是肾动脉的广泛性血栓引起的急性肾功能衰竭。
A univentricular assistant artificial heart was applied to the experiment goat, which survived for 11 days and 23 hours. During the period of survival, the parameters such as E.C.G., central venous blood pressure, respiration and temperature appeared to be essentially normal. The necessary amount of blood flow was well regulated by the pump. The driving system worked continuously, smoothly and reliably for 11 days. Postmortem patho-anatomy revealed that the chief cause of the animal’s death was acute renal failure as a result of widespread multiple embolism of renal arteries.2. 中国已经成功地发射了第一颗试验通信卫星。
这颗卫星是由三级火箭推动的,一直运转正常。
它标志着我国运载工具和电子技术方面进入了一个新阶段。
The successful launching of China’s first experimental communication satellite, which was propelled by a three-stage rocket and has been in operation ever since, indicates that our nation has entered a new stage in the development of carrier rockets and electronics.3.石墨晶体结构遭到破坏时,总是碎化为微小尺寸的片状粉末。
Nanotechnology (原文)
Nanotechnology Is Changing the World纳米技术正在改变这个世界[1] "Everything, when miniaturized to the sub-100-nanometer scale, has new properties, regardless of what it is," says Chad Mirkin, professor of chemistry at Northwestern University. 当被缩小至其百纳米大小并忽略掉它是什么时,一切事物都被赋予新的性质This is what makes nanoparticles the materials of the future.这就是未来的材料--纳米粒子。
They have strange chemical and physical properties compared to their larger-particle kin. The thing that matters about nanoparticles is their scale.比起较大颗粒的同类物质,纳米粒子有着特殊的物理和化学性能。
这些性质都和纳米粒子大小有关。
[2] Nanoscale materials are used in everything from sunscreen to chemical catalysts to antibacterial agents--from the mundane to the lifesaving.纳米单位的材料被使用到各种事物之中。
从防晒油到化学催化剂再至抗菌剂(一般的或是救人的)无一不使用到它。
"I spilled wine at a Christmas party once, and I was terrified. Red wine on a white carpet. And it wipes right up," Mirkin recalled.有一次在圣诞节聚会上,我很不开心就打翻了红酒。
《科技英语文献阅读与翻译》Unit 1-TextB

made it hard for the president candidate to fall asleep. 2) to join as spouses, marry eg: Falling in love at the first sight, they coupled as a perfect match.
promotion. (The) chances are (that)…: It is likely that… eg: Chances are they’ll be intent on leaving for
As the Internet and other forms of electronic communication become more prevalent, electronic security is also becoming increasingly important. Cryptography is used to protect e-mail messages, credit card information, and corporate data.
eavesdrop v. listen secretly to private conversation of others
英文文献 科技类 原文及翻译 (电子 电气 自动化 通信…) 8

Switching Power Supply目录1 Switching Power Supply (1)Linear versus Switching Power Supplies (1)Basic Converters (2)1.2.1Forward-Mode Converter Fundamentals (2)1.2.3 Flyback or Boost-mode Converter Fundamentals (4)1.3 Topologies (5)1 开关电源 (7)1.1 线性电源和开关电源之比拟 (7)根本转换器 (8)1.2.1 前向模式转换器根底 (8)12.2 增压模式转换器根底 (8)1.3 拓扑结构 (9)2 Operational Amplifiers (10)2 放大器 (14)1 Switching Power SupplyEvery new electronic product , except those that battery powered, requires converting off-line 115V ac or 230V ac power to some dc voltage for powering the electronics. Efficient conversion of electrical power is becoming a primary concern to companies and to society as a whole.Switching power supplies offer not only higher efficiencies but also offer greater flexibility to the designer. Recent advances in semiconductor, magnetic and passive technologies make the switching power supply an ever more popular choice in the power conversion arena today.1.1 Linear versus Switching Power SuppliesHistorically, the linear regulator was the primary method of creating a regulated output voltage. It operates by reducing a higher input voltage down to the lower output voltage by linearly controlling the conductivity of a series pass power device in response to changes in its load. This results in a large voltage being placed across the pass unit with the load current flowing through it.This headroom loss ()V I⨯ causes the linear regulator to only be 30 todrop load50 percent efficient. That means that for each watt delivered to the load , at least a watt has to be dissipated in heat. The cost of the heatsink actually makes the linear regulator uneconomical above 10watts for small applications. Below that point, however, they are cost effective in step-down applications.The switching regulator operates the power devices in the full-on and cutoff states. This then results in either large currents being passed through the power devices with a low“on〞voltage or no current flowing with high voltage across the device. This results in a much lower power being dissipated within the supply.The average switching power-supply exhibits efficiencies of between 70 to 90 percent, regardless of the input voltage.Higher levers of integration have driven the cost of switching power supplies downward which makes in an attractive choice for output powers greater than 10 watts or where multiple outputs are desired.1.2 Basic ConvertersForward-Mode Converter FundamentalsThe most elementary forward-mode converter is the Buck or Step-down Converter which can be seen in Figure 3.1.Its operation can be seen as having two distinct time periods which occur when the series power switch is on and off. When the power switch is on ,the inputvoltage is connected to the input of the inductor .The output of switch of inductor is the output voltage, and the rectifier is back-biased. During this period, since there is a constant voltage source connected across the inductor, the inductor current begins to linearly ramp upward which is described by:()()in out on L on V V t i L -⨯=During the “on 〞 period , energy is being stored within the core material of the inductor in the form of flux. There is sufficient energy stored to carry the requirements of the load during the next off period.The next period is the “off 〞 period of the power switch .When the power switch turns off, the input voltage of the inductor flies below ground and is clamped at one diode drop below ground by the catch diode. Current now begins to flow through the catch diode thus maintaining the load current loop. This remove the stored energy from the inductor, The inductor. The inductor current during this time is:()()out D offL off V V t i L -⨯=This period ends when the power switch is once again turned on.Regulation is accomplished by varying the on-to-off duty cycle of the power switch. The relationship which approximately describes its operation is:out in V V ≈∂⨯Where ∂ is the duty cycle (()/on on off t t t ∂=+).The buck converter is capable of kilowatts of output power, but suffers from one serious shortcoming which would occur if the power switch were to fail short-circuited, the input power source is connected directly to the load circuitry with usually produces catastrophic results. To avoid this situation, a crowbar is placed across the output. A crowbar is a latching SCR which is fired when the output is sensed as entering an overvoltage condition. The buckconverter should only be used for board-level regulation.Flyback or Boost-mode Converter FundamentalsThe most elementary flyback-mode converter is the boost or Step-up Converter. Its schematic can be seen in Figure3.2.Its operation can also be broken into two distinct periods where the power switch is on or off. When power switch turns on, the input voltage source is placed directly across the inductor. This causes the current to begin linearly ramping upwards from zero and is described by:()in on L on V t i L ⨯=Once again, energy is being stored during each cycle times the frequency of operation must b higher than the power demands of the load or,20.5sto pkop out P L I f P =⨯⨯>The power switch then turns off and the inductor voltage flies back abovethe input voltage and is clamped and is clamed by the rectifier at the output voltage .The current then begins to linearly ramp downward until the until the energy within the core is completely depleted. Its waveform which is shown in Figure 3.3 is determined by:()()out in offL off V V t i L -⨯=The boost converter should also be only used for board-level regulation.1.3 TopologiesA topology is the arrangement of the power devices and their magnetic elements. Each topology has its own merits within certain applications. Some of the factors which determine the suitability of a particular topology to a certain application are:1) Is the topology electrically isolated from the input to the output or not.2) How much of the input voltage is placed across the inductor or transformer.3) What is the peakcurrent flowing through the power semiconductors.4) Are multiple outputs required.5) How much voltage appears across the power semiconductors.The first choice that faces the designer is whether to have input to output transformer isolation. Non-isolated switching power supplies are typically used for board-level regulation where a dielectric barrier is provided elsewhere within the system. Non-isolated topologies should also be used where the possibility of a failure does not connect the input power source to the fragile load circuitry. Transformer isolation should be used in all other situations. Associated with that is the need for multiple output voltages. Transformers provide an easy method for adding additional output voltage to the switching power supply. The companies building their own power systems are leaning toward transformer isolation in as many power supplies as possible since it prevents a domino effect during failure conditions.1 开关电源除了那些用电池做电源的电子产品外,每个新型电子产品都需要将115V或者230V 的交流电源转换为直流电源,为电路供电。
外文科技文献

DEVELOPMENT OF A FREE-FLIGHT SIMULATIONINFRASTRUCTUREEric S. MilesPaul C. DavisSeagull Technology, Inc.16400 Lark Ave., Los Gatos, CA 95032David J. WingNASA Langley Research CenterHampton, V A 23681ABSTRACTIn anticipation of a projected rise in demand for air transportation, NASA and the FAA are researching new air-traffic-management (ATM) concepts that fall under the paradigm known broadly as “free flight”. This paper documents the software development and engineering efforts in progress by Seagull Technology, to develop a free-flight simulation (FFSIM) that is intended to help NASA researchers test mature-state concepts for free flight, otherwise referred to in this paper as distributed air / ground traffic management (DAGTM). Under development is a distributed, humanin-the-loop simulation tool that is comprehensive in its consideration of current and envisioned communication, navigation and surveillance (CNS) components, and will allow evaluation of critical air and ground traffic management technologies from an overall systems perspective. The FFSIM infrastructure is designed to incorporate all three major components of the A TM triad: aircraft flight decks, air traffic control (A TC), and (eventually) airline operational control (AOC) centers.INTRODUCTIONOver the past twenty years, increased demand for air travel has outpaced the design of the National Airspace System (NAS). Insufficient capacity,limited access, and excessive operating restrictions have led to significant increases in user costs and delays and an overall decrease in efficiency for all users 1. Furthermore, the market demand for air travel is expected to increase several-fold in the coming decade. Recent technological advances now provide the opportunity to redesign the NAS to substantially increase its capacity to accommodate air traffic growth and to provide substantial operational flexibility to airspace users,while maintaining, and possibly improving, safety.Figure 1: The FFSIM infrastructure is designed to incorporate all three major componentsof the ATM triad: aircraft flight decks, air traffic control (ATC), and airline operationalcontrol (AOC) centers.A broad concept of NAS operations known as “free flight”, proposed by the RTCA 1 in 1995, may provide these and other benefits through application of new technologies and procedures. The primary difference between today’s directroute-clearance approach and free flight will be the pilot’s ability to operate the flight without the requirement to follow specific route, speed, and altitude clearances. In mature visions of free flight, the flight crew of properly equipped aircraft would be given the authority to maneuver at will while broadcasting their intentions to other system participants and maintaining responsibility for ensuring minimum separation standards are met.Aircraft without the equipment necessary for performing these functions would receive clearances from the ground through voice or data link communications, and separation assurance responsibility for these aircraft would remain with the ground-based air traffic service provider (ATSP). This distribution of responsibility and authority will be referred to in this paper as distributed air / ground traffic management (DAGTM).In recent years, the ATM community has been focused on the development of technologies and evolutionary improvements in efficiency and capacity based on the current mode of groundbased air traffic control. The Center-TRACON Automation System (CTAS) under development by NASA 2, 3 will provide air traffic controllers a set of tools to better manage scheduling and sequencing of aircraft into the terminal area with continuous updating to the runway threshold. Limited implementation of CTAS and other tools is underway through the FAA’s Free F light Phase I program. Isolated demonstrations and evaluations of other airborne technologies related to the advancement of ATM are underway in the FAA’s Safe Flight 21 project.In contrast to the development of individual airborne and ATM technologies, less attention has been given to date to establishing the overall system feasibility of mature-state free-flight concepts and the integration of essential underlying CNS components. The work documented in this paper leverages these past and existing airborne and ATM research endeavors while filling a void in the ATM research community by providing a mechanism for evaluating the system-level feasibility of free-flight operations and the integration of enabling technologies, including CNS components and decision support tools (DSTs), for both the flight crew and the air traffic service providers on the ground.RELATED DEVELOPMENTSSeveral recent and current development efforts are relevant to the FFSIM infrastructure development. The efforts are briefly described below, and the connection of each to FFSIM development or NASA research is identified. A thorough discussion of these endeavors is beyond the scope of this paper.Ground ATM Decision Support ToolsNASA researchers have been developing and fieldtesting CTAS, a DST for ground-basedair-traffic management 2, 3. Core components of CTAS are leveraged in the FFSIM infrastructureto provide the situation display for the ATSP station. (The notion in free flight of distributing traffic management functions between the ground and the air leads to the re-designation of air traffic controller to air traffic service provider.) Inclusion of these CTAS core components allows for eventual expansion to include CTAS components such as the Traffic Management Advisor (TMA) for scheduling and En-route / Descent Advisor (E/DA) for ATSP decision support.Flight Simulation ToolsNASA has developed a versatile PC-based simulation of a transport-category aircraft called “FastWin” (FMS-Autoflight Simulation Tools for Windows) 4. FastWin includes an aircraft performance model, a Flight Management System (FMS) model, Control Display Unit (CDU), Mode Control Panel (MCP), and primary cockpit displays. FastWin is integrated into the FFSIM infrastructure as the core component of the research pilot station.Logicon previously developed a software simulation tool entitled “Pseudo Aircraft Systems” (PAS) to serve as a target generation facility and pseudo-pilot station with a low-fidelity auto-pilot capability for CTAS development experiments 5. The PAS software is used in the FFSIM infrastructure to manage traffic scenarios, to generate targets, and to provide the ability for a human operator to control multiple pseudo-pilots.The National Aerospace Laboratory of The Netherlands (NLR) is currently conducting extensive ATM research activities through humanin-the-loop simulation. Notable simulation tools developed by NLR include TMX, a target-aircraft generator; AIRSIM, an interface to a single pilot station; and NARSIM, a distributed simulation effort aimed at investigating the European version of free flight 6. A close working relationship has been established between Seagull and NLR to exploit lessons learned during their research and to accelerate FFSIM design and development. NASA and NLR are exploring a collaborative approach to free-flight research with activities starting in 1999.Eurocontrol has also been very active in ATM research. Efforts relevant to FFSIM include:OASIS, a generic simulation infrastructure based on the Common Object Request Broker Architecture (CORBA); ESCAPE, a distributed air traffic control (ATC) simulation that uses OASIS; and FREER, a four-part research program that is simulating, developing, and flight-testing a prototype system for fully-autonomous aircraft operations.Figure 2: The FFSIM infrastructure is a distributed simulation tool capable of providing a comprehensive model of current and envisioned air-traffic-management operations with future communication, navigation, and surveillance capabilities.Conflict Detection and ResolutionNumerous organizations have developed software algorithms for conflict detection and resolution (CD&R) 7. Seagull Technology has developed a solution approach that can be applied in both ground and airborne contexts 8. MIT has performed significant research in CD&R 9, 10. Lincoln Laboratory at MIT developed a self-organizational approach for conflict resolution 11. This last approach, combined with conflict detection based on aircraft state information and flight plans, was implemented as an initial decision-aiding prototype system in FFSIM for the flight deck and the ATSP by Lockheed Martin Aeronautical Systems 12.CNS ModelingMIT Lincoln Labs has extensively studied the automatic dependent surveillance –broadcast (ADS-B) concept 13, 14. These theoretical and empirical studies of ADS-B, which include message-collision modeling, are leveraged in the FFSIM representation of the CNS infrastructure. NASA Glenn Research Center is currently developing high-fidelity parametric models for communication mechanisms such as Mode S, VHF Datalink (VDL) Modes 2, 3, and 4, etc. Many of these models will be incorporated into FFSIM to permit assessment of design requirements for freeflight application of these technologies.FFSIM INFRASTRUCTURE AND RESEARCH CAPABILITIESThe FFSIM infrastructure is unique in that it provides system-level integration and modeling of technologies vital for free flight with sufficient fidelity for assessing their impact on the feasibility of free-flight operations. FFSIM provides a humanin-the-loop environment where severalresearch-subject pilots fly simulated aircraft through simulated airspace managed by one or more research-subject ATSPs. The human-subject pilots and ATSPs may have the assistance of prototype DSTs providing separation assurance and other navigation functions and may communicate by voice or digital communications. CNS technologies are modeled with moderate realism to allow the processes of communication, navigation, and surveillance to occur within the free-flight environment with realistic characteristics and limitations. Additionally, the simulated airspace may be populated by target aircraft controlled by American Institute of Aeronautics and Astronautics human participants responding to voice clearances issued by the ATSPs.FFSIM will provide research capabilities in several areas. First, it will allow the assessment of CNS infrastructure design characteristics with respect to free-flight operations. Performance standards are emerging for technologies vital to free flight without the benefit of requirements generated under free-flight operating conditions. Data generated by FFSIM will begin to shed light on these requirements. Second, FFSIM will provide a means for assessing human performance and procedures to the extent appropriate in a mediumfidelity simulation environment. The type and presentation of information required by the human participants to maintain awareness and to perform the necessary duties of their stations can be assessed. Third, parametric controls on important factors such as wind-prediction accuracy will allow determination of trajectory-prediction requirements for conflict detection. Fourth, FFSIM will permit assessment of CD&R feasibility in both level and transition phases of flight and in a variety of airspace-constrained and schedule-constrained scenarios. In particular, the ability of aircraft transitioning to terminal-area operations tomaintain separation while adhering to operational air traffic scheduling is critical for assessing feasibility of free flight since the vast majority of U.S. domestic airspace contains aircraft in this mode of operation. Additionally, this ability must be assessed in the presence of aircraft with mixed levels of equipage (and therefore varying ability toself-separate).The current scope of FFSIM development focuses on the A TSP and aircraft flight deck aspects of DAG TM operations. However, the FFSIM infrastructure is designed to facilitate the incorporation of a future AOC presence, as shown in Figure 1. The FFSIM infrastructure allows participants to emulate the roles of pilots and pseudo-pilots, ground-based controllers, and, eventually, airline dispatchers.FFSIM INFRASTRUCTURE COMPONENTSThe FFSIM infrastructure is a distributed simulation tool comprised of many components. The majority of these components are depicted in Figure 2. Development emphasis to date has focused on the aircraft flight deck, the A TSP, and the CNS infrastructure components. Modeling of the AOC and information sharing between the AOC and the flight deck and in the ATSP are planned for future phases of FFSIM development. A brief description of each FFSIM component follows.Pilot StationsThe airborne portion of the FFSIM infrastructure is comprised of two types of flight-deck environments. The first environment, the “pilot station”, provides an opportunity for severalhumans (i.e. research-subject pilots) to each control a single aircraft in real time with a reasonably high level of interface fidelity. The pilot station is implemented on one or two PC workstations and is comprised of an aircraft performance model, an interactive flight management system (FMS), a primary-flight display (PFD), a navigation display (ND), a mode control panel (MCP), communications, navigation, and surveillance equipment. These components, with the exception of the CNS equipment, are represented by the NASA-developed FastWin software package, which has been integrated with the FFSIM infrastructure. Figure 3 depicts the FastWin PFD and ND used for the FFSIM pilot station. The navigation display will be evolved into an integrated multifunction display (MFD) that will include navigation, flight plan, traffic, weather, and other data, in a user-configurable, layered format.The CNS equipment models the hardware components required by the pilot station. Components include a voice transceiver for twoway verbal communication with the ATSP (and eventually the AOC), a transceiver for two-way digital controller-pilot data link communications (CPDLC) with the ATSP (and eventually the AOC), a global positioning system (GPS) receiver, an ADS-B transceiver, and receivers for Traffic Information Services (TIS) data and Flight Information Services (FIS) data.The pilot stations may be configured to contain an integrated DST that accepts information regarding its own airplane, other traffic, and NAS status. The FFSIM infrastructure allows an integrated DST to output recommended conflict-free flight trajectories that adhere to specified constraints. The development of such DSTs is not within the scope of the FFSIM infrastructure development.Figure 3: The FastWin PFD and Navigation Displays are integral parts of the FFSIMresearch pilot station. (Courtesy of NASA)Pseudo-Pilot StationsThe second flight-deck environment in the FFSIM infrastructure is the pseudo-pilot station, which allows several humans (i.e. pseudo pilots) to each control multiple aircraft (up to a dozen each) in real time with a low level of interface fidelity. The pseudo-pilot capability enables FFSIM traffic scenarios to be populated with many aircraft operated by just a few humans.Similar to the pilot station, the pseudo-pilot station contains an auto-pilot capability, CNS equipment, and possible instances of DSTs similar to those that would serve the research pilot stations. No individual cockpit displays such as the PFD and MFD are included in the pseudo-pilot station. The pseudo-pilot station auto-pilot and control interface are represented by the PAS software. The pseudopilot CNS equipment is essentially the duplicate of that employed by the pilot stations and is configured to serve multiple aircraft.Air Traffic Service Provider StationsThe FFSIM ground infrastructure includes an A TSP component that allows human subjects to regulate and separate air traffic according to both current and future (envisioned) operating procedures for ATM. The central ingredient of the FFSIM ATSP component is the NASA-developed CTAS software. Figure 4 depicts the CTAS horizontal situation display known as the “pGUI”. Multiple ATSP stations representing adjacent sectors can operate simultaneously, allowing research to pursue multi-sector coordination issues.The FFSIM infrastructure provides both voice and digital communications between the ATSP and all appropriately equipped aircraft allowing for simulation of both current and various future concepts for air / ground interaction.The A TSP component of the FFSIM infrastructure is designed to incorporate ground-based DSTs. However, the development of such DSTs is not within the scope of the FFSIM infrastructure development.Communication, Navigation and Surveillance ComponentsThe comprehensive modeling of CNS components at a level of fidelity sufficient for concept feasibility assessment and operational requirements definition is a major focus of this development effort. The ability to selectively increase the fidelity of any component has been designed into the FFSIM infrastructure. Each of the CNS infrastructure components is briefly described below.Automatic Dependent Surveillance –BroadcastADS-B messages are broadcast by all aircraft equipped with an ADS-B transceiver and received by all similarly-equipped aircraft and the A TSP. American Institute of Aeronautics and Astronautics Both the broadcast rate and the nominal operating range for ADS-B are scenario parameters that can be configured by the researcher.Each ADS-B message will contain, at a minimum, the following basic message content: computer identification number, timestamp, aircraft type, position source, latitude, longitude, altitude source, altitude, ground speed, ground-track direction, and vertical speed. The level of intent (i.e., thenumber of intended future trajectory change points) to be included in the ADS-B message can be configured by the researcher.The FFSIM infrastructure modeling of ADS-B will be initially consistent with Mode-S data communication, yet will not preclude the option of future modeling of other viable technologies capable of implementing ADS-B.Ground-Based SurveillanceRadar is the centerpiece surveillance system that enables current air traffic control. It is projected to continue to play a vital, albeit diminished, role as operations evolve toward free flight. The FFSIM infrastructure modeling of ground-based surveillance will include both primary and secondary surveillance radar (PSR and SSR).The PSR model will include the Air Route Surveillance Radar (ARSR), used in the en-route airspace, and the Airport Surveillance Radar (ASR), used in the TRACON airspace 15. The SSR model will include the interrogation-reply interaction process of secondary surveillance, including the envisioned ground-initiated communication broadcast (GICB) concept detailed in 16. In the GICB concept, the transponder reply to ground interrogation will include the most recent ADS-B message of the interrogated aircraft, permitting independent verification of ADS-B messaging on the ground.Traffic Information ServicesAs depicted in Figure 2, TIS provides a compilation of ground-received ADS-B message data and PSR/SSR data that is broadcast to all equipped aircraft, the ATSP, and the AOCs. The TIS concept allows aircraft that are equipped with a TIS receiver, but not with an ADS-B transceiver, to receive the position, velocity and intent content of neighboring aircraft 17. For aircraft equipped with ADS-B, TIS provides a redundant source of traffic information. The TIS broadcast rate and nominal-operating range are scenario parameters that can be configured by the researcher.Figure 4: The CTAS pGUI controller display, shown here for ZFW, comprises the main controller display for the FFSIM infrastructure. (Courtesy of NASA)Flight Information ServicesFIS is a broadcast of weather, wind, special-use airspace (SUA), and other pertinent information from the ground to equipped aircraft 18. A variety of FIS sources, such as NEXRAD weather radar, METARs, etc., will provide the FIS data content.The FFSIM infrastructure modeling of FIS will be initially consistent with VDL Mode-2 technology, a likely candidate for FIS realization. Again, other viable technologies capable of implementing FIS will not be precluded. The FIS broadcast rate and nominal-operating range are scenario parameters that can be selected by the researcher.Controller-Pilot Data Link CommunicationsCPDLC allows for digital communications between the ATSP station and the pilot and pseudo-pilot stations. A graphical interface will be implemented for both the pilot and ATSP stations to facilitate the use of CPDLC 19.CPDLC is envisioned for many applications in current and future ATM operations, including the up-link of clearances, route deviations, and new trajectories from the ATSP to the pilot. One application of CPDLC, important in the DAG TM concept, is the digital up-link of conflict resolution maneuvers from a ground-based DST to the pertinent aircraft. Pilots will use CPDLC torespond to and possibly request A TSP instructions, as well as inform ATSP of changes to the current flight trajectory.The FFSIM infrastructure modeling of CPDLC will be initially consistent with VDL Mode 3 technology, a likely candidate for realizing CPDLC. Other communication technologies for implementing CPDLC will not be precluded.Global Positioning System NavigationThe position and velocity data contained in each ADS-B message is provided by a GPS satellite navigation receiver model. The FFSIM infrastructure includes a stochastic error model of selective availability (SA) for the basic navigation signal 20, 21. Modeling of wide-area and local-area augmentation system (WAAS and LAAS) accuracy levels are planned as future enhancements.Airline Operational ControlThe third and final entity of the A TM operations triad depicted in the lower left of Figure 1 is the AOC facility. Although the initial development effort has focused on the flight deck and ATSP aspects of ATM operations, the FFSIM infrastructure is designed to facilitate incorporation of an AOC presence in the future, complete with all the communication channels between the AOC, the flight decks, and the ATSP.SOFTWARE IMPLEMENTATIONThis section describes details of the FFSIM infrastructure software.CORBAThe FFSIM infrastructure employs the Common Object Request Broker Architecture (CORBA) 22. CORBA is a software industry standard for facilitating communication between objects in distributed applications. An important aspect of CORBA is the interface definition language (IDL). The IDL allows language independent software interfaces to be specified. An interface specified in IDL is compiled into code stubs for a specified target language, e.g. C++ or Java. A programmer creating a CORBA server must implement the skeleton methods in the generated code stubs. To create a client to the server, a programmer simply needs to create a proxy to the server by using the generated code.CORBA was chosen over a more traditional TCP/IP approach because of its language independent, object-oriented, and standardized nature. It was also felt, and later substantiated, that CORBA would be a faster and less error prone method for developing inter-process communications. Eurocontrol’s successful implementation of CORBA for A TM simulations also contributed to the decision.CORBA ServicesThe CORBA specification outlines standard services that are intended to provide generic support to any CORBA system. FFSIM is designed to leverage some of these services. The CORBA Naming Service is used to store object names in a repository. Conceptually it is similar to thewhite pages of a telephone directory. FFSIM uses the Naming Service to store names of objects that represent individual aircraft components as well as the names of simulation services. The object names exist in the Naming Service repository even when the simulation is not active. This allows a client to search the Naming Service and retrieve a specific object. If the server that contains that object is inactive the object will be automatically launched.The CORBA Event Service is used to de-couple the clients from the servers. This service allows servers to publish specific types of events and clients to subscribe to those events. The server supplying the event does not need knowledge of the client consuming the event. A new service called the Notification Service extends the functionality of the Event Service and provides “quality of service” delivery of events. While currently not used in FFSIM, the Event Service or its replacement the Notification Service, will be a critical part of the future infrastructure.The Time Service is another CORBA service that may be incorporated into FFSIM. The Time Service provides distributed time management for a CORBA system. Unlike the Naming, Event, and Notification services a commercial version of the Time Service is not available. Any Time Service created for FFSIM will also need to be extended to include simulation time management.Component IntegrationThe CTAS, PAS, and FastWin software all handle external communication using TCP/IP sockets. These applications are representative of a large number of existing components that do not use CORBA, but may require integration into FFSIM. There are two approaches for integrating existing TCP/IP components into FFSIM.The first approach is to add a CORBA interface to the existing component. The advantage of this approach is that the application will be completely “plugged” into the simulation and will be able to easily take advantage of any services provided by other CORBA components. The disadvantage of this approach is that it may require extensive modifications, depending on the organization of the original source code.The second approach is to create a new process that can communicate with the non-CORBA application using an existing TCP/IP interface and with the rest of the simulation using CORBA. The advantage of this approach is that, depending on the state of the existing application, little if any source code modifications are required. This may also be the only option if source code cannot be modified. The disadvantage of this approach is that it adds a layer of overhead and can be more time consuming to implement than directly integrating CORBA.The FFSIM infrastructure uses the second approach for integrating FastWin. The FastWin application contains three separate processes that would potentially need to be modified to integrate with CORBA. Because FastWin is a research tool, NASA is continuously updating it. For these reasons it was decided that the best approach was to create a single CORBA to TCP/IP bridge and minimize changes to the existing FastWin code.The integration of PAS into FFSIM was also accomplished using a CORBA to TCP/IP bridge. Theprimary reason for using a bridge in this instance was the proprietary nature of the PAS source code prevented direct modifications.InterfacesThe FFSIM infrastructure interfaces were created using the CORBA IDL. The IDL provides greater flexibility than a traditional byte or text message sent over a TCP/IP socket. The CORBA interfaces create a simulation databus. Figure 5 illustrates the CORBA communication between components within the pilot station. Using the existing FFSIM interfaces a new component could easily be added.Figure 5: Pilot Station Component Communication.Message FilteringIn some cases the FFSIM interfaces provide access to more data than is realistic or even necessary. However, this makes it easier to examine future concepts where this additional data may be needed.One strategy the FFSIM infrastructure uses is client-side filtering. For example, an airborne CPDLC transceiver broadcasts and receives datalink messages to and from an ATSP CPDLC transceiver on the ground. The probability of a successful transmission is determined by many factors including the distance between transceivers. The receiving CPDLC transceiver determines if a message is successfully received based on the distance to the transmitting transceiver. In order to accomplish this the receiver must know information about the transmitter that may not be contained in the message, e.g. its location. The solution is to provide this information in a message header that is only used by the CPDLC transceiver and not passed along to any other ground or airborne applications. It is left to the individual implementation to decide what to do with the information in the message header. In the case of the CPDLC transceiver, the message receiver would use the location of the transmitter to determine if the transmitter is out of range. If it does determines that the transmitter is out of range the message is logged as being dropped and then。
关于科技的英文文献综述范文

关于科技的英文文献综述范文Here is a 1000-word essay on the topic of "A Literature Review on Technology":Technology has become an integral part of our daily lives, transforming the way we live, work, and communicate. From the invention of the printing press to the development of artificial intelligence, the influence of technology on human civilization is undeniable. This literature review aims to provide a comprehensive overview of the various aspects of technology and its impact on society.One of the most significant advancements in technology is the rapid development of digital technologies. The internet has revolutionized the way we access information, communicate with others, and conduct business. The rise of social media platforms has transformed the way we interact with our friends, family, and the world around us. Similarly, the growing popularity of e-commerce has changed the way we shop, with online retailers offering a vast array of products and services at our fingertips.Another important aspect of technology is the field of automationand robotics. Automated systems are now being used in a wide range of industries, from manufacturing to healthcare, to improve efficiency and reduce human error. The development of sophisticated robots has also led to significant advancements in fields such as exploration, disaster relief, and medical procedures. However, the increasing reliance on automation has also raised concerns about job displacement and the impact on the workforce.The rise of artificial intelligence (AI) is perhaps one of the most significant technological advancements of our time. AI systems are capable of performing tasks traditionally reserved for humans, such as decision-making, problem-solving, and language processing. The potential applications of AI are vast, ranging from personalized recommendations on e-commerce platforms to the development of self-driving cars. At the same time, the ethical implications of AI, such as the potential for bias and the impact on privacy, are the subject of ongoing debates and research.Another area of technology that has seen significant advancements is the field of renewable energy. As the world grapples with the challenge of climate change, the development of sustainable energy sources has become a pressing concern. Solar, wind, and hydroelectric power are just a few examples of the renewable energy technologies that are being explored and implemented on a global scale. These technologies not only help to reduce our carbonfootprint but also have the potential to provide affordable and accessible energy to communities around the world.The impact of technology on healthcare is another area that deserves attention. Advancements in medical technology, such as diagnostic imaging, telemedicine, and personalized medicine, have revolutionized the way we approach healthcare. These technologies have the potential to improve patient outcomes, reduce healthcare costs, and increase access to quality care, particularly in remote or underserved areas.However, the rapid pace of technological change has also raised concerns about the potential negative impacts of technology on our lives. The increased reliance on digital devices and the constant connectivity of the internet can lead to issues such as screen addiction, sleep deprivation, and social isolation. Additionally, the collection and use of personal data by tech companies and governments have raised concerns about privacy and data security.In conclusion, this literature review has explored the various aspects of technology and its impact on society. From the transformative power of digital technologies to the advancements in renewable energy and healthcare, the role of technology in shaping our world is undeniable. However, as we continue to embrace technological progress, it is crucial that we carefully consider the ethical andsocietal implications of these advancements. By doing so, we can ensure that technology is used to enhance and improve the lives of people around the world, rather than contributing to societal problems.。
英文科技文献及翻译

外文翻译DC GENENRATORS1. INTRODUCTIONFor all practical purposes, the direct-current generator is only used for special applications and local dc power generation. This limitation is due to the commutator required to rectify the internal generated ac voltage, thereby making largescale dc power generators not feasible.Consequently, all electrical energy produced commercially is generated and distributed in the form of three-phase ac power. The use of solid state converters nowadays makes conversion to dc economical. However, the operating characteristics of dc generators are still important, because most concepts can be applied to all other machines.2. FIELD WINDING CONNECTIONSThe general arrangement of brushes and field winding for a four-pole machine is as shown in Fig.1. The four brushes ride on the commutator. The positive brusher are connected to terminal A1 while the negative brushes are connected to terminal A2 of the machine. As indicated in the sketch, the brushes are positioned approximately midway under the poles. They make contact with coils that have little or no EMF induced in them, since their sides are situated between poles.Figure 1 Sketch of four-pole dc matchineThe four excitation or field poles are usually joined in series and their ends brought out to terminals marked F1 and F2. They are connected such that they produce north and south poles alternately.The type of dc generator is characterized by the manner in which the fieldexcitation is provided. In general, the method employed to connect the field and armature windings falls into the following groups (see Fig.2):Figure2 Field connections for dc generators:(a)separately excited generator;(b)self-excited,shunt generator;(c)series generator;(d)compound generator;short-shunt connection;(e)compoundgenerator,long-shunt connection.The shunt field contains many turns of relatively fine wire and carries a comparatively small current, only a few percent of rated current. The series field winding, on the other hand, has few turns of heavy wire since it is in series with the armature and therefore carries the load current.Before discussing the dc generator terminal characteristics, let us examine the relationship between the generated voltage and excitation current of a generator on no load. The generated EMF is proportional to both the flux per pole and the speed at which the generator is driven, EG=kn. By holding the speed constant it can be shown the EG depends directly on the flux. To test this dependency on actual generators is not very practical, as it involves a magnetic flux measurement. The flux is produced by the ampere-turns of the field coils: in turn, the flux must depend on the amount of field current flowing since the number of turns on the field winding is constant. This relationship is not linear because of magnetic saturation after the field current reaches a certain value. The variation of EG versus the field current If may be shown by a curve known as the magnetization curve or open-circuit characteristic. For this a given generator is driven at a constant speed, is not delivering load current, and has its fieldwinding separately excited.The value of EG appearing at the machine terminals is measured as If is progressively increased from zero to a value well above rated voltage of that machine. The resulting curve is shown is Fig.3. When Ij=0, that is, with the field circuit open circuited, a small voltage Et is measured, due to residual magnetism. As the field current increases, the generated EMF increases linearly up to the knee of the magnetization curve. Beyond this point, increasing the field current still further causes saturation of the magnetic structure to set in.Figure 3 Magnetization curve or open-circuit characteristic of a separately excited dc machine The means that a larger increase in field current is required to produce a given increase in voltage.Since the generated voltage EG is also directly proportional to the speed, a magnetization curve can be drawn for any other speed once the curve is determined. This merely requires an adjustment of all points on the curve according ton n x E E G G ''where the quantities values at the various speeds.3. VOLTAGE REGULATIONLet us next consider adding a load on generator. The terminal voltage will then decrease (because the armature winding ha resistance) unless some provision is made to keep it constant. A curve that shows the value of terminal voltage for various load currents is called the load or characteristic of the generator.Figure 4 (a) directs current it to urge the generator load characteristics; (b) circuit diagramFig.4 shows the external characteristic of a separately excited generator. The decrease in the terminal voltage is due mainly to the armature circuit resistance RA. In general,A A G t R I E V -=where Vt is the terminal voltage and IA is the armature current (or load current IL) supplied by the generator to the load.Another factor that contributes to the decrease in terminal voltage is the decrease in flux due to armature reaction. The armature current established an MMF that distorts the main flux, resulting in a weakened flux, especially in noninterpole machines. This effect is called armature reaction. As Fig.4 shows, the terminal voltage versus load current curve does not drop off linearly since the iron behaves nonlinear. Because armature reaction depends on the armature current it gives the curve its drooping characteristic.4. SHUNT OR SELF-EXCIITED GENRATORSA shunt generator has its shunt field winding connected in parallel with the armature so that the machine provides its own excitation, as indicated in Fig.5. The question arises whether the machine will generate a voltage and what determines the voltage.For voltage to “build up ” as it is called, there must be some remanent magnetism in the field poles. Ordinarily, if the generator has been used previously, there will be some remanent magnetism. We have seen in Section 3 that if the field would be disconnected, there will be small voltage Ef generated due to this remanent magnetism, provided that the generator is driven at some speed. Connecting the field for self-excitation, this small voltage will be applied to the shunts field and drive a small current through the field circuit. If this resulting small current in the shunt field is of such a direction that it weakens the residual flux, the voltage remains near zeroand the terminal voltage does not build up. In this situation the weak main pole flux opposes the residual flux.Figure 5 Shunt generator:(a)circuit;(b)load characteristicIf the connection is such that the weak main pole flux aids the residual flux, the induced voltage increases rapidly to a large, constant value. The build-up process is readily seen to be cumulanve. That is, more voltage increases the field current, which in turn increases the voltage, and so on. The fact that this process terminates at a finite voltage is due to the nonlinear behavior of the magnctic circuit. In steady state the generated voltage is causes a field current to flow that is just sufficient to develop a flux required for the generated EMF that causes the field current to flow.The circuit carries only dc current, so that the field current depends only on the field circuit resistance, Rf. This may consist of the field circuit resistance Rf, the field current depends on the generated voltage in accordance with Ohm ’s law.It should be evident that on a new machine or one that has lost its residual flux because of a long idle period, some magnetism must be created. This is usually done by connecting the field winding only to a separate dc source for a few seconds. This procedure is generally known as flashing the field.Series GeneratorsAs mentioned previously, the field winding of a series generator is in series with the armature. Since it carries the load current the series field winding consists of only a few turns of thick wire. At no load, the generated voltage is small due to residual field flux only. When a load is added, the flux increases, and so does the generated voltage. Fig.7 shows the load characteristic of a series generator driven at a certain speed. The dashed line indicates the generated EMF of the same machine with the armature open-circuited and the field separately excited. The difference between the two curves is simply the IR drop in the series field and armature winding, such that)(S A A G t R R I E V +-=where RS is the series field winding resistance.Figure 7 Series generator: (a)circuit diagram;(b)load characteristicsCompound Generators The compound generator has both a shunt and a series field winding, the latter winding wound on top of the shunt winding. Fig.8 shows the circuit diagram. The two windings are usually connected such that their ampere-turns act in the same direction. As such the generator is said to be cumulatively compounded.The shunt connection illustrated in Fig.8 is called a long shunt connection. If the shunt field winding is directly connected across the armature terminals, the connection is referred to as a short shunt. In practice the connection used is of little consequence, since the shunt field winding carries a small current compared to the full-load current. Furthermore, the number of turns on the series field winding. This implies it has a low resistance value and the corresponding voltage drop across it at full load is minimal.Curves in Fig.9 represents the terminal characteristic of the shunt field winding alone. By the addition of a small series field winding the drop in terminal voltage with increased loading is reduced as indicated. Such a generator is said to be undercompounded. By increasing the number of series turns, the no-load and full-load terminal voltage can be made equal; the generator is then said to be flatcompounded. If the number of series turns is more than necessary to compensate for the voltage drop, the generator is overcome pounded. In that case the full-load voltage is higher than the no-load voltage.Figure 9 Terminal characteristics of compound generators compared with that of the shunt generatorThe overcompounded generator may be used in instances where the load is at some distance from the generator. The voltage drops in the feeder lines are the compensated for with increased loading. Reversing the polarity of the series field in relation to the shunt field, the fields will oppose each other more and more as the load current increase. Such a generator is said to be differentially compounded. It is used in applications where feeder lines could occur approaching those of a short circuit. An example would be where feeder lines could break and short circuit the generator. The short-circuit current, however, is then limited to a “safe”value. The terminal characteristic for this type of generator is also shown in Fig.9. Compound generators are used more extensively than the other types because they may be designed to have a wide varity of terminal characteristics.As illustrated, the full-load terminal voltage can be maintained at the no-load value by the proper degree of compounding. Other methods of voltage control are the use of rheostats, for instance, in the field circuit. However, with changing loads it requires a constant adjustment of the field rheostat to maintain the voltage. A more useful arrangement, which is now common practice, is to use an automatic voltage regulator with the generator. In essence, the voltage regulator is a feedback control system. The generator output voltage is sensed and compared to a fixed reference voltage deviation from the reference voltage gives an error signal that is fed to a power amplifier. The power amplifier supplies the field excitation current. If the error signal is positive, for example, the output voltage is larger than desired and the amplifier will reduce its current drive. In doing so the error signal will be reduced to zero.中文翻译直流发电机1.介绍对于所有实际目的来说,直流发电机仅用于特殊场合和地方性发电厂。
科技英语文献
科技英语文献Technology has become an integral part of our daily lives, revolutionizing the way we communicate, work, and interact with the world around us. The field of technology encompasses a vast array of innovations, from cutting-edge advancements in artificial intelligence to groundbreaking discoveries in renewable energy. As we delve deeper into the realm of technology, it is crucial to understand the importance of technology-related literature in shaping our understanding and driving future progress.The field of technology is constantly evolving, with new developments and discoveries emerging at a rapid pace. In order to stay informed and keep up with the latest trends, it is essential to engage with high-quality English literature on the subject. These publications, ranging from academic journals to industry reports, provide a wealth of information and insights that can inform decision-making, guide research, and inspire innovation.One of the key benefits of engaging with technology-related English literature is the ability to access cutting-edge research and development. Academic journals, for instance, often publish peer-reviewed articles that showcase the latest breakthroughs andadvancements in various technological domains. By reading these publications, researchers and professionals can gain a deeper understanding of the current state of the field, identify emerging trends, and uncover new opportunities for exploration and experimentation.Moreover, technology-related English literature can serve as a valuable resource for policymakers, industry leaders, and government officials. These publications can provide critical insights into the social, economic, and environmental implications of technological advancement, informing decision-making processes and guiding the development of policies and regulations. This, in turn, can help ensure that technological progress is aligned with the broader societal goals of sustainability, equity, and ethical consideration.Beyond the realm of academic and policy-oriented literature, the field of technology also encompasses a vast array of industry-specific publications. These include trade journals, market reports, and specialized magazines that delve into the intricacies of various technological sectors, such as information technology, renewable energy, or biotechnology. By engaging with these publications, professionals, entrepreneurs, and investors can stay up-to-date on the latest trends, identify emerging opportunities, and make informed decisions that drive the growth and development of theirrespective industries.One of the most compelling aspects of technology-related English literature is its ability to foster cross-cultural collaboration and knowledge-sharing. As technology increasingly transcends national boundaries, the need for effective communication and exchange of ideas becomes paramount. By engaging with high-quality English literature, professionals and researchers from around the world can access a shared knowledge base, collaborate on projects, and learn from the experiences and insights of their global counterparts.Furthermore, technology-related English literature can serve as a valuable educational resource, inspiring and educating the next generation of innovators and problem-solvers. By exposing students and young professionals to the latest research, case studies, and thought-leadership in the field, these publications can ignite a passion for technology, encourage critical thinking, and equip the next generation with the skills and knowledge necessary to tackle the challenges of the future.In conclusion, the importance of technology-related English literature cannot be overstated. These publications serve as a vital conduit for the dissemination of knowledge, the exploration of new ideas, and the advancement of technological progress. By engaging with these resources, professionals, researchers, policymakers, andthe general public can stay informed, make informed decisions, and contribute to the ongoing evolution of technology in a way that benefits society as a whole. As we continue to navigate the rapidly changing landscape of technology, the role of high-quality English literature will only become more crucial in shaping our collective future.。
科技文化英文文献
科技文化英文文献English: Technology plays a significant role in shaping modern culture by influencing how people interact with each other, consume information, and express themselves creatively. The digital revolution has accelerated the pace of cultural production and consumption, resulting in a more interconnected global community. Social media platforms, for example, have revolutionized communication by enabling instant connections and the sharing of ideas on a massive scale. Technology has also created new forms of cultural expression, such as digital art and virtual reality experiences, that challenge traditional notions of creativity and media consumption. Furthermore, technological advancements have blurred the boundaries between different cultural practices, leading to the emergence of hybrid forms of expression that blend elements from various traditions. As technology continues to evolve, it will likely shape cultural norms and values in ways that we have yet to fully comprehend.中文翻译: 科技通过影响人们如何相互交流、消费信息和进行创意表达,在塑造现代文化中发挥着重要作用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
AMBULANT:A Fast,Multi-Platform Open Source SML PlayerDick C.A. Bulterman, Jack Jansen, Kleanthis Kleanthous, Kees Blom and Daniel Benden CWI: Centrum voor Wiskunde en InformaticaKruislaan 4131098 SJ Amsterdam, The Netherlands+31 20 592 43 00Dick.Bulterman@cwi.nlABSTRACTThis paper provides an overview of the Ambulant Open SMIL player. Unlike other SMIL implementations, the Ambulant Player is a reconfigureable SMIL engine that can be customized for use as an experimental media player core.The Ambulant Player is a reference SMIL engine that can be integrated in a wide variety of media player projects. This paper starts with an overview of our motivations for creating a new SMIL engine then discusses the architecture of the Ambulant Core (including the scalability and custom integration features of the player).We close with a discussion of our implementation experiences with Ambulant instances for Windows,Mac and Linux versions for desktop and PDA devices.Categories and Subject Descriptors H.5.1 Multimedia Information Systems [Evaluation]H.5.4 Hypertext/Hypermedia [Navigation]. General TermsExperimentation, Performance, V erification KeywordsSMIL, Player, Open-Source, Demos1. MOTIV ATIONThe Ambulant Open SMIL Player is an open-source, full featured SMIL 2.0 player. It is intended to be used within the researcher community (in and outside our institute) in projects that need source code access to a production-quality SMIL player environment. It may also be used as a stand-alone SMIL player for applications that do not need proprietary mediaformats.The player supports a range of SMIL 2.0 profiles ( including desktop and mobile configurations) and is available in distributions for Linux, Macintosh, and Windows systems ranging from desktop devices to PDA and handheld computers. While several SMIL player implementations exist,including the RealPlayer [4], InternetExplorer [5], PocketSMIL [7],GRiNS [6],X-SMILES [8] and various proprietary implementations for mobile devices, we developed Ambulant for three reasons: Permission to make digital or hard copies of all or part of this work for personal or classroom use is granted without fee provided that copies are not made or distributed for profit or commercial advantage and that copies bear this notice and the full citation on the first page. To copy otherwise, or republish, to post on servers or to redistribute to lists,requires prior specific permission and/or a fee.'MM’04, October 10-16, 2004, New Y ork, New Y ork, USA.Copyright 2004 ACM 1-58113-893-8/04/0010...$5.00. ·None of the existing SMIL players provides a complete and correct SMIL 2.0 implementation. The Ambulant player implements all of SMIL, based on the SMIL 2.0 Language profile plus extensions to support advanced animation and the needs of the mobile variant used by the 3GPP/PSS-6 SMIL specification [9].·All commercial SMIL players are geared to the presentation of proprietary media. The Ambulant player uses open-source media codecs and open-source network transfer protocols, so that the player can be easily customized for use in a wide range of researchprojects.·Our goal is to build a platform that will encourage the development of comparable multimedia research output.By providing what we expect will be a standard baseline player, other researchers and development organizations can concentrate on integrating extensions to the basic player (either in terms of new media codecs or new network control algorithms). These extensions can then be shared by others.In contrast to the Helix client architecture [10], which also moved to a GPL core in mid-2004, the Ambulant player supports a wider range of SMIL target application architectures,it provides a more complete and correct implementation of the SMIL language, it provides much better performance on low-resource devices and it provides a more extensible media player architecture. It also provides an implementation that includes all of the media codecs as part of the open client infrastructure.The Ambulant target community is not viewers of media content, but developers of multimedia infrastructures, protocols and networks. Our goal has been to augument the existing partial SMIL implementations produced by many groups with a complete implementation that supports even the exotic features of the SMIL language.The following sections provide an introduction to the architecture of the player and describe the state of the various Ambulant implementations. We then discuss how the Ambulant Core can be re-purposed in other projects. We start with a discussion of Ambulant’s functional support for SMIL.2. FUNCTIONAL SUPPORT FOR SMIL 2.0The SMIL 2.0 recommendation [1] defines 10 functional groups that are used to structure the standard’s 50+ modules. These modules define the approximately 30 XML elements and 150 attributes that make up the SMIL 2.0 language. In addition to defining modules, the SMIL 2.0 specification also defines a number of SMIL profiles: collection of elements, attributes and attribute values that are targeted to meet the needs of a particular implementation community. Common profiles include the full SMIL 2.0 Language, SMIL Basic, 3GPP SMIL,XHTML+SMIL and SMIL1.0 profiles.A review of these profiles is beyond the scope of this paper(see [2]), but a key concern of Ambulant’s development has been to provide a player core that can be used to support a wide range of SMIL target profiles with custom player components.This has resulted in an architecture that allows nearly all aspects of the player to be plug-replaceable via open interfaces. In this way, tailored layout, scheduling, media processing and interaction modules can be configured to meet the needs of individual profile requirements. The Ambulant player is the only player that supports this architecture.The Ambulant player provides a direct implementation of the SMIL 2.0 Language profile, plus extensions that provide enhanced support for animation and timing control. Compared with other commercial and non-commercial players, the Ambulant player implements not only a core scheduling engine, it also provides complete support for SMIL layout,interaction, content control and networking facilities.Ambulant provides the most complete implementation of the SMIL language available to date.3.AMBULANT ARCHITECTUREThis section provides an overview of the architecture of the Ambulant core. While this discussion is high-level, it will provide sufficient detail to demonstrate the applicability of Ambulant to a wide range of projects. The sections below consider the high-level interface structure, the commonservices layer and the player common core architecture.3.1 The High-Level Interface Structure Figure 1 shows the highest level player abstraction. The player core support top-level control external entry points (including play/stop/pause) and in turn manages a collection of external factories that provide interfaces to data sources (both for standard and pseudo-media), GUI and window system interfaces and interfaces to renderers. Unlike other players that treat SMIL as a datatype [4] ,[10], the Ambulant engine has a central role in interaction with the input/output/screen/devices interfaces.This architecture allows the types of entry points (and the moment of evaluation) to be customized and separated from the various data-sources and renderers. This is important for integration with environments that may use non-SMIL layout or special device interface processing.3.2 The Common Services LayerFigure 2 shows a set of common services that are supplied for the player to operate. These include operating systems interfaces, drawing systems interfaces and support for baseline XML functions.All of these services are provided by Ambulant; they may also be integrated into other player-related projects or they may be replaced by new service components that areoptimized for particular devices or algorithms.3.3 The Player Common CoreFigure 3 shows a slightly abstracted view of the Ambulant common core architecture. The view is essentially that of a single instance of the Ambulant player. Although only one class object is shown for each service,multiple interchangeable implementations have been developed for all objects (except the DOM tree) during the player’s development. As an example,multiple schedulers have been developed to match the functional capabilities of various SMIL profiles.Arrows in the figure denote that one abstract class depends on the services offered by the other abstract class. Stacked boxes denote that a single instance of the player will contain instances of multiple concrete classes implementing that abstract class: one for audio, one for images, etc. All of the stacked-box abstract classes come with a factory function to create the instances of the required concrete class.The bulk of the player implementation is architected to be platform independent. As we will discuss, this platform independent component has already been reused for five separate player implementations. The platform dependent portions of the player inc lude support for actual rendering, UI interaction and datasource processing and control. When the player is active, there is asingle instance of the scheduler and layout manager, both of which depend on the DOM tree object. Multiple instances of data source and playable objects are created. These interact with multiple abstract rendering surfaces. The playable abstract class is the scheduler interface (play, stop) for a media node, while the renderer abstract class is the drawing interface (redraw). Note that not all playables are renderers (audio, SMIL animation). The architecture has been designed to have all components be replaceable, both in terms of an alternative implementation of a given set of functionality and in terms of a complete re-purposing of the player components. In this way, the Ambulant core can be migrated to being a special purpose SMIL engine or a non-SMIL engine (such as support for MPEG-4 or other standards).The abstract interfaces provided by the player do not require a “SMIL on Top” model of document processing. The abstract interface can be used with other high-level controlmodels (such as in an XHTML+SMIL implementation), or to control non-SMIL lower-level rendering (such as timed text). Note that in order to improve readability of the illustration, all auxiliary classes (threading, geometry and color handling, etc.) and several classes that were not important for general understanding (player driver engine, transitions, etc.) have been left out of the diagram.4. IMPLEMENTATION EXPERIENCES This sectionwill briefly review our implementation experiences with the Ambulant player. We discuss the implementation platforms used during SMIL’s development and describe a set of test documents that were created to test the functionality of the Ambulant player core. We conclude with a discussion on the performance of the Ambulant player. 4.1 Implementation PlatformsSMIL profiles have been defined for a wide range of platforms and devices, ranging from desktop implementations to mobile devices. Inorder to support our research on distributed SMIL document extensions and to provide a player that was useful for other research efforts, we decided to provide a wide rangeof SMIL implementations for the Ambulant project. The Ambulant core is available as a single C++ source distribution that provides support for the following platforms:·Linux: our source distribution inc lude makefiles that are used with the RH-8 distribution of Linux. We provide support for media using the FF-MPEG suite [11]. The player interface is built using the Qt toolkit [12].·Macintosh:Ambulant supports Mac OS X 10.3. Media rendering support is available via the internal Quicktime API and via FF-MPEG. The player user interface uses standard Mac conventions and support (Coca). ·Windows: Ambulant provides conventional Win32 support for current generation Windows platforms. It has been most extensively tested with XP (Home,Professional and TabletPC) and Windows-2000. Media rendering include third-party and local support for imaging and continuous media. Networking and user interface support are provided using platform-embedded libraries.·PocketPC: Ambulant supports PocketPC-2000,PocketPC-2002andWindows Mobile 2003 systems. The PocketPC implementations provide support for basic imaging, audio and text facilities.·Linux PDA support:Ambulant provides support for the Zaurus Linux-PDA. Media support is provided via the FF-MPEG library and UI support is provide via Qt. Media support includes audio, images and simple text.In each of these implementations, our initial focus has been on providing support for SMIL scheduling and control functions.We have not optimized media renderer support in the Ambulant 1.0 releases, but expect to provide enhanced support in future versions.4.2 Demos and T est SuitesIn order to validate the Ambulant player implementation beyond that available with the standard SMIL test suite [3], several demo and test documents have been distributed with the player core. The principal demos include:·Welcome: A short presentation that exercises basic timing,media rendering, transformations and animation.·NYC: a short slideshow in desktop and mobile configurations that exercises scheduling, transformation and media rendering.·News: a complex interactive news document that tests linking, event-based activation, advanced layout, timing and media integration. Like NYC, this demo support differentiated mobile and desktop configurations.·Links: a suite of linking and interaction test cases.·Flashlight: an interactive user’s guide that tests presentation customization using custom test attributes and linking/interaction support. These and other demos are distributed as part of the Ambulant player web site [13].4.3 Performance EvaluationThe goal of the Ambulant implementation was to provide a complete and fast SMIL player. We used a C++ implementation core instead of Java or Python because our experience had shown that on small devices (which we feel hold significant interest for future research), the efficiency of the implementation still plays a dominant role. Our goal was to be able to read, parse, model and schedule a 300-node news presentation in less than two seconds on desktop and mobile platforms. This goal was achieved for all of the target platforms used in the player project. By comparison, the same presentation on the Oratrix GRiNS PocketPC player took 28 seconds to read, parse and schedule. (The Real PocketPC SMIL playerand the PocketSMIL players were not able to parse and schedule the document at all because of their limited SMIL language support.)In terms of SMIL language performance, our goal was to provide a complete implementation of the SMIL 2.0 Language profile[14]. Where other players have implemented subsets of this profile,Ambulant has managed to implement the entire SMIL 2.0 feature set with two exceptions: first, we currently do not support the prefetch elements of the content control modules; second, we provide only single top-level window support in the platform-dependent player interfaces. Prefetch was not supported because of the close association of an implementation with a given streaming architecture. The use of multiple top-level windows, while supported in our other SMIL implementation, was not included in version 1.0 of Ambulant because of pending working on multi-screen mobile devices. Both of these feature are expected to be supported in the next release of Ambulant.5.CURRENT ST ATUS ANDA V AILABILITYT his paper describes version 1.0 of the Ambulant player, which was released on July 12, 2004. (This version is also known as the Ambulant/O release of the player.) Feature releases and platform tuning are expected to occur in the summer of 2004. The current release of Ambulant is always available via our SourceForge links [13], along with pointers to the most recent demonstrators and test suites.The W3C started its SMIL 2.1 standardization in May, 2004.At the same time, the W3C’s timed text working group is completing its first public working draft. We will support both of these activities in upcoming Ambulant releases.6. CONCLUSIONSWhile SMIL support is becoming ubiquitous (in no small part due to its acceptance within the mobile community), the availability of open-source SMIL players has been limited. This has meant that any group wishing to investigate multimedia extensions or high-/low-level user or rendering support has had to make a considerable investment in developing a core SMIL engine.We expect that by providing a high-performance, high-quality and complete SMIL implementation in an open environment, both our own research and the research agendas of others can be served. By providing a flexible player framework, extensions from new user interfaces to new rendering engines or content control infrastructures can be easily supported.7. ACKNOWLEDGEMENTSThis work was supported by the Stichting NLnet in Amsterdam.8. REFERENCES[1]W3C,SMIL Specification,/AudioVideo.[2]Bulterman,D.C.A and Rutledge, L.,SMIL 2.0:Interactive Multimedia for Web and Mobile Devices, Springer, 2004. [3]W3C,SMIL2.0 Standard Testsuite,/2001/SMIL20/testsuite/ [4]RealNetworks,The RealPlayer 10,/[5]Microsoft,HTML+Time in InternetExplorer 6,/workshop/author/behaviors/time.asp[6]Oratrix, The GRiNS 2.0 SMIL Player./[7]INRIA,The PocketSMIL 2.0 Player,wam.inrialpes.fr/software/pocketsmil/. [8],X-SMILES: An Open XML-Browser for Exotic Applications./[9]3GPP Consortium,The Third-GenerationPartnership Project(3GPP)SMIL PSS-6Profile./ftp/Specs/archive/26_series /26.246/ 26246-003.zip[10]Helix Community,The Helix Player./.[11]FFMPEG,FF-MPEG:A Complete Solution for Recording,Converting and Streaming Audio and Video./[12]Trolltech,Qtopia:The QT Palmtop/ [13]Ambulant Project,The Ambulant 1.0 Open Source SMIL2.0 Player,/.[14]Bulterman,D.C.A.,A Linking andInteraction Evaluation Test Set for SMIL,Proc. ACM Hypertext 2004, SantaCruz,August, 2004.。