电力拖动自动控制系统(第四版)习题答案_陈伯时教学教材
电力拖动自动控制系统-运动控制系统-阮毅-陈伯时思考题和课后习题答案
电力拖动自动控制系统-运动控制系统〔阮毅伯时〕课后答案包括思考题和课后习题第2章2-1 直流电动机有哪几种调速方法?各有哪些特点?答:调压调速,弱磁调速,转子回路串电阻调速,变频调速。
特点略。
2-2 简述直流 PWM 变换器电路的根本构造。
答:直流 PWM 变换器根本构造如图,包括 IGBT 和续流二极管。
三相交流电经过整流滤波后送往直流 PWM 变换器,通过改变直流 PWM 变换器中 IGBT 的控制脉冲占空比,来调节直流 PWM 变换器输出电压大小,二极管起续流作用。
2-3 直流 PWM 变换器输出电压的特征是什么?答:脉动直流电压。
2=4 为什么直流 PWM 变换器-电动机系统比 V-M 系统能够获得更好的动态性能?答:直流 PWM 变换器和晶闸管整流装置均可看作是一阶惯性环节。
其中直流 PWM 变换器的时间常数 Ts 等于其 IGBT 控制脉冲周期〔1/fc〕,而晶闸管整流装置的时间常数 Ts 通常取其最大失控时间的一半〔1/〔2mf〕。
因 fc 通常为 kHz 级,而 f 通常为工频〔50 或 60Hz〕为一周〕,m 整流电压的脉波数,通常也不会超过 20,故直流 PWM 变换器时间常数通常比晶闸管整流装置时间常数更小,从而响应更快,动态性能更好。
2=5 在直流脉宽调速系统中,当电动机停顿不动时,电枢两端是否还有电压?电路中是否还有电流?为什么?答:电枢两端还有电压,因为在直流脉宽调速系统中,电动机电枢两端电压仅取决于直流 PWM 变换器的输出。
电枢回路中还有电流,因为电枢电压和电枢电阻的存在。
2-6 直流 PWM 变换器主电路中反并联二极管有何作用?如果二极管断路会产生什么后果?答:为电动机提供续流通道。
假设二极管断路则会使电动机在电枢电压瞬时值为零时产生过电压。
2-7 直流 PWM 变换器的开关频率是否越高越好?为什么?答:不是。
因为假设开关频率非常高,当给直流电动机供电时,有可能导致电枢电流还未上升至负载电流时,就已经开场下降了,从而导致平均电流总小于负载电流,电机无法运转。
《电力拖动自动控制系统》第四版阮毅陈伯时课后答案120页PPT

36、“不可能”这个字(法语是一个字 ),只 在愚人 的字典 中找得 到。--拿 破仑。 37、不要生极, 不要心 动要行 动。 38、勤奋,机会,乐观是成功的三要 素。(注 意:传 统观念 认为勤 奋和机 会是成 功的要 素,但 是经过 统计学 和成功 人士的 分析得 出,乐 观是成 功的第 三要素 。
39、没有不老的誓言,没有不变的承 诺,踏 上旅途 ,义无 反顾。 40、对时间的价值没有没有深切认识 的人, 决不会 坚韧勤 勉。
61、奢侈是舒适的,否则就不是奢侈 。——CocoCha nel 62、少而好学,如日出之阳;壮而好学 ,如日 中之光 ;志而 好学, 如炳烛 之光。 ——刘 向 63、三军可夺帅也,匹夫不可夺志也。 ——孔 丘 64、人生就是学校。在那里,与其说好 的教师 是幸福 ,不如 说好的 教师是 不幸。 ——海 贝尔 65、接受挑战,就可以享受胜利的喜悦 。——杰纳勒 尔·乔治·S·巴顿
谢谢!
电力拖动自动控制系统课后习题答案全内含两份阮毅陈伯时完整版
电力拖动自动控制系统课后习题答案全内含两份阮毅陈伯时HUA system office room 【HUA16H-TTMS2A-HUAS8Q8-HUAH1688】电力拖动自动控制系统 课后习题答案{全,内含两份,二无一失}——运动控制系统第四版{上海大学 阮毅 陈伯时}1-1为什么PWM-电动机系统比晶闸管----电动机系统能够获得更好的动态性能?答:PWM 开关频率高,响应速度快,电流容易连续,系统频带宽,动态响应快,动态抗扰能力强。
1-2试分析有制动通路的不可逆PWM 变换器进行制动时,两个VT 是如何工作的?答:制动时,由于1g U 的脉冲变窄而导致d i 反向时,U g2变正,于是VT 2导通,VT 2导通,VT 1关断。
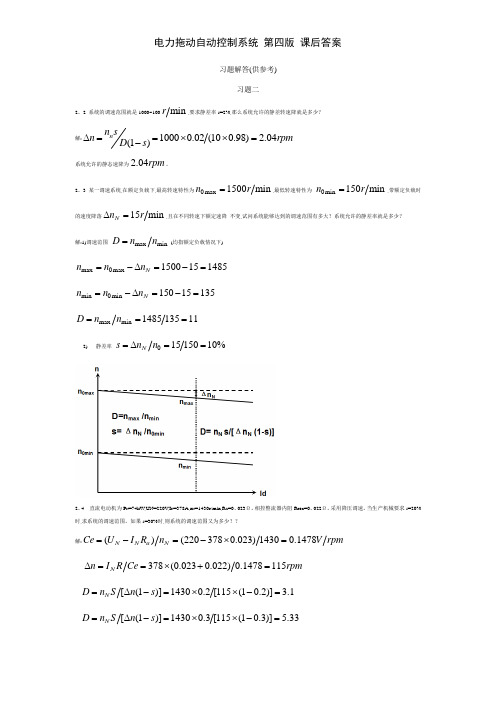
1-3调速范围和静差率的定义是什么?调速范围,静态速降和最小静差之间有什么关系为什么脱离了调速范围,要满足给定的静差率也就容易得多了答:生产机械要求电动机提供的最高转速max n 和最低转速min n 之比叫做调速范围,用字母D 表示,即:m inm ax n n D负载由理想空载增加到额定值时,所对应的转速降落N n ∆与理想空载转速min 0n 之比,称为系统的静差率S,即:min0n n s N ∆= 调速范围,静差速降和最小静差之间的关系为:由于在一定的N n 下,D 越大,m in n 越小N n ∆又一定,则S 变大。
所以,如果不考虑D ,则S 的调节也就会容易,1-4.某一调速系统,测得的最高转速特性为m in /1500max 0r n =,最低转速特性为m in /150min 0r n =,带额定负载的速度降落m in /15r n N =∆,且不同转速下额定速降N n ∆不变,试问系统能够达到的调速范围有多大系统允许的静差率是多大解1-5闭环调速系统的调速范围是1500----150r/min ,要求系统的静差S<=2%,那末系统允许的静态速降是多少如果开环系统的静态速降是100r/min 则闭环系统的开环放大倍数应有多大1,min /06.3%)21(10%21500)1(101501500min max r S D S n n n n D N =-⨯≤-=∆===则 2,7.31106.31001=-≥+=∆∆K K n n cl op则1-6某闭环调速系统的开环放大倍数为15时,额定负载下电动机的速降为8 r/min ,如果将开环放大倍数他提高到30,它的速降为多少在同样静差率要求下,调速范围可以扩大多少倍同样静差率的条件下调速范围与开环放大倍数加1成正比1-7某调速系统的调速范围D=20,额定转速min /1500r n =,开环转速降落min /240r n Nop =∆,若要求静差率由10%减少到5%则系统的开环增益将如何变化?解:原系统在调速范围D=20,最小转速为:min /75201500max min r D n n ===, 原系统在范围D=20,静差率为10%时,开环增益为:静差率10%时原系统的开环增益为: 1-8转速单环调速系统有那些特点改变给定电压能否改变电动机的转速为什么如果给定电压不变,调节测速反馈电压的分压比是否能够改变转速为什么如果测速发电机的励磁发生了变化,系统有无克服这种干扰的能力答:1)闭环调速系统可以比开环调速系统硬得多的稳态特性,从而在保证一定静差率的要求下,能够提高调速范围。
电力拖动自动控制系统第四版习题答案_陈伯时

≤
=
8.33
r
/ min
cl
D
(1
?
s
)
20
×
(1
?
0.1)
(2)
(3)
?
n
307.6
op
(4)闭环系统的开环放大系数为
K
=
?
1
=
?
1
=
35.93
?
n
8.33
cl
K
35.93
运算放大器所需的放大倍数
K
=
=
=
13.77
p
K
α
/
C
35
×
0.01 / 0.1341
s
e
解:
R=
4.8
?
R
/
R=
0.3125
?
n
=
=
≈
2
63
(
r
min
)
N
D
(
1
?
s
)
20
×
(
1
?
0
05)
2-6有一晶闸管稳压电源,其稳态结构如图所示,已知给定电压
Uu
=
8
8
V
,
比例调节放大
系数
K
=
2,
晶闸管装置放大系数
K
=
15,
反馈系数
γ
=
0
7
。求:
p
(1)输出电压
U
;
d
(2)若把反馈线断开,U为何值?开环时的输出电压是闭环时的多少倍?
d
(3)若把反馈系数减至
U
运动控制系统第四版思考题答案
运动控制系统第四版思考题答案电力拖动自动控制系统-运动控制系统(阮毅陈伯时)课后答案包括思考题和课后习题第2章2-1 直流电动机有哪几种调速方法?各有哪些特点?答:调压调速,弱磁调速,转子回路串电阻调速,变频调速。
特点略。
2-2 简述直流PWM 变换器电路的基本结构。
答:直流PWM 变换器基本结构如图,包括IGBT 和续流二极管。
三相交流电经过整流滤波后送往直流PWM 变换器,通过改变直流PWM 变换器中IGBT 的控制脉冲占空比,来调节直流PWM 变换器输出电压大小,二极管起续流作用。
2-3 直流PWM 变换器输出电压的特征是什么?答:脉动直流电压。
2=4 为什么直流PWM 变换器-电动机系统比V-M 系统能够获得更好的动态性能?答:直流PWM 变换器和晶闸管整流装置均可看作是一阶惯性环节。
其中直流PWM 变换器的时间常数Ts 等于其IGBT 控制脉冲周期(1/fc),而晶闸管整流装置的时间常数Ts 通常取其最大失控时间的一半(1/(2mf)。
因fc 通常为kHz 级,而f 通常为工频(50 或60Hz)为一周内),m 整流电压的脉波数,通常也不会超过20,故直流PWM 变换器时间常数通常比晶闸管整流装置时间常数更小,从而响应更快,动态性能更好。
2=5 在直流脉宽调速系统中,当电动机停止不动时,电枢两端是否还有电压?电路中是否还有电流?为什么?答:电枢两端还有电压,因为在直流脉宽调速系统中,电动机电枢两端电压仅取决于直流PWM 变换器的输出。
电枢回路中还有电流,因为电枢电压和电枢电阻的存在。
2-6 直流PWM 变换器主电路中反并联二极管有何作用?如果二极管断路会产生什么后果?答:为电动机提供续流通道。
若二极管断路则会使电动机在电枢电压瞬时值为零时产生过电压。
2-7 直流PWM 变换器的开关频率是否越高越好?为什么?答:不是。
因为若开关频率非常高,当给直流电动机供电时,有可能导致电枢电流还未上升至负载电流时,就已经开始下降了,从而导致平均电流总小于负载电流,电机无法运转。
《电力拖动自动控制系统—运动控制系统》(第四版)课后习题答案
《电力拖动自动控制系统—运动控制系统》(第四版)课后习题答案对于《电力拖动自动控制系统—运动控制系统》的学习,在课后应该做一些练习题加以巩固。
一下是给大家的《电力拖动自动控制系统—运动控制系统》(第四版)课后习题答案,希望对你有帮助。
一判断题1弱磁控制时电动机的电磁转矩属于恒功率性质只能拖动恒功率负载而不能拖动恒转矩负载。
(Ⅹ)2采用光电式旋转编码器的数字测速方法中,M法适用于测高速,T法适用于测低速。
(√)3只有一组桥式晶闸管变流器供电的直流电动机调速系统在位能式负载下能实现制动。
(√)4直流电动机变压调速和降磁调速都可做到无级调速。
(√)5静差率和机械特性硬度是一回事。
(Ⅹ)6带电流截止负反馈的转速闭环系统不是单闭环系统。
(Ⅹ)7电流—转速双闭环无静差可逆调速系统稳态时控制电压Uk的大小并非仅取决于*速度定Ug的大小。
(√)8双闭环调速系统在起动过程中,速度调节器总是处于饱和状态。
(Ⅹ)9逻辑无环流可逆调速系统任何时候都不会出现两组晶闸管同时封锁的情况。
(Ⅹ)10可逆脉宽调速系统中电动机的转动方向(正或反)由驱动脉冲的宽窄决定。
(√)11双闭环可逆系统中,电流调节器的作用之一是对负载扰动起抗扰作用。
(Ⅹ)与开环系统相比,单闭环调速系统的稳态速降减小了。
(Ⅹ)12α=β配合工作制的可逆调速系统的制动过程分为本组逆变和它组制动两阶段(√)13转速电流双闭环速度控制系统中转速调节为PID调节器时转速总有超调。
(Ⅹ)14电压闭环相当于电流变化率闭环。
(√)15闭环系统可以改造控制对象。
(√)16闭环系统电动机转速与负载电流(或转矩)的稳态关系,即静特性,它在形式上与开环机械特性相似,但本质上却有很大的不同。
17直流电动机弱磁升速的前提条件是恒定电动势反电势不变。
(√)18直流电动机弱磁升速的前提条件是恒定电枢电压不变。
(Ⅹ) 19电压闭环会给闭环系统带来谐波干扰,严重时会造成系统振荡。
(√)20对电网电压波动来说,电压环比电流环更快。
电力拖动自动控制系统 第四版 课后答案
习题解答(供参考)习题二2、2 系统的调速范围就是1000~100min r ,要求静差率s=2%,那么系统允许的静差转速降就是多少?解:10000.02(100.98) 2.04(1)n n sn rpm D s ∆==⨯⨯=-系统允许的静态速降为2.04rpm 。
2、3 某一调速系统,在额定负载下,最高转速特性为0max 1500min n r =,最低转速特性为 0min 150min n r =,带额定负载时的速度降落15min N n r ∆=,且在不同转速下额定速降 不变,试问系统能够达到的调速范围有多大?系统允许的静差率就是多少?解:1)调速范围max minD n n =(均指额定负载情况下)max 0max 1500151485N n n n =-∆=-= min 0min 15015135N n n n =-∆=-= max min 148513511D n n ===2) 静差率01515010%N s n n =∆==2、4 直流电动机为P N =74kW,UN=220V ,I N =378A,n N =1430r/min,Ra=0、023Ω。
相控整流器内阻Rrec=0、022Ω。
采用降压调速。
当生产机械要求s=20%时,求系统的调速范围。
如果s=30%时,则系统的调速范围又为多少??解:()(2203780.023)14300.1478N N a N Ce U I R n V rpm =-=-⨯=378(0.0230.022)0.1478115N n I R rpm ∆==⨯+=(1)]14300.2[115(10.2)] 3.1N D n S n s =∆-=⨯⨯-=(1)]14300.3[115(10.3)] 5.33N D n S n s =∆-=⨯⨯-=2、5 某龙门刨床工作台采用V-M 调速系统。
已知直流电动机,主电路总电阻R=0、18Ω,Ce=0、2V •min/r,求:(1)当电流连续时,在额定负载下的转速降落Nn ∆为多少?(2)开环系统机械特性连续段在额定转速时的静差率N S 多少?(3)若要满足D=20,s ≤5%的要求,额定负载下的转速降落Nn ∆又为多少?解:(1)3050.180.2274.5/min N N n I R r ∆=⨯=⨯= (2)0274.5274.5)21.5%N N S n n =∆=+=(3)(1)]10000.050.95] 2.63/min N n n S D s r ∆=-=⨯⨯=2、6 有一晶闸管稳压电源,其稳态结构图如图所示,已知给定电压*8.8u U V =、比例调节器放大系数2P K =、晶闸管装置放大系数15S K =、反馈系数γ=0、7。
电力拖动自动控制系统-第四版完整版-陈伯时

电力拖动自动控制系统第四版课后答案习题二2-1 试分析有制动通路的不可逆PWM 变换器进行制动时,两个VT 是如何工作的答:先减小控制电压,使1gU 得正脉冲变窄,负脉冲变宽,从而使平均电枢电压dU 降低。
但是由于机械惯性,转速和反电势还来不及变化,因而造成dEU>的局面,很快电流di 反向,VD2 截止,在onttT≤<期间2gU 为正,于是VT2 导通反向电流产生能耗制动作用。
在onTtTt≤<+期间,VT2 关断,di−经VD1 续流,向电源回馈能量。
同时VD1 两端压降钳住VT1,使他不能导通。
在制动状态,VT2 和VD1 轮流导通,VT1 始终关断。
在制动阶段,VT1 始终不导通。
VT2 导通期间,并能耗制动;VT2 不导通期间,VD1 续流,并回馈制动。
2.2 系统的调速范围是1000~100 r min ,要求静差率s=2%,那么系统允许的静差转速降是多少?n s解:∆n = nD(1- s) = 1000⨯ 0.02 (10⨯ 0.98) = 2.04rpm系统允许的静态速降为2.04rpm 。
2.3 某一调速系统,在额定负载下,最高转速特性为n0 max = 1500r min ,最低转速特性为n= 150r min ,带额定负载时的速度降落∆n N = 15r min ,且在不0 min同转速下额定速降不变,试问系统能够达到的调速范围有多大?系统允许的静差率是多少?解:1)调速范围 D = nn min (均指额定负载情况下)maxn max = n0 max - ∆n N = 1500 -15 = 1485n min = n0 min - ∆n N = 150 -15 = 135D = n max n min = 1485 135 = 112) 静差率s = ∆nNn0 = 15 150 = 10%2.4 直流电动机为P N=74kW,UN=220V,I N=378A,n N=1430r/min,Ra=0.023Ω。
电力拖动自动控制系统_第四版_课后答案

习题解答(供参考)习题二min r10000.02(100.98) 2.04(1)n n sn rpm D s ∆==⨯⨯=-2.04rpm0max 1500min n r =0min 150min n r =15min N n r ∆=max minD n n =max 0max 1500151485N n n n =-∆=-=min 0min 15015135N n n n =-∆=-=max min 148513511D n n === 01515010%N s n n =∆==()(2203780.023)14300.1478N N a N Ce U I R n V rpm =-=-⨯= 378(0.0230.022)0.1478115N n I R Ce rpm ∆==⨯+= [(1)]14300.2[115(10.2)] 3.1N D n S n s =∆-=⨯⨯-=[(1)]14300.3[115(10.3)] 5.33N D n S n s =∆-=⨯⨯-=N n ∆N S Nn ∆3050.180.2274.5/min N N n I R Ce r ∆=⨯=⨯= 0274.5(1000274.5)21.5%N N S n n =∆=+=(1)]10000.05[200.95] 2.63/min N n n S D s r ∆=-=⨯⨯=*8.8u U V =2P K =15S K =d U d U *uU *)2158.8(12150.7)12d p s u p s U K K U K K V γ=+=⨯⨯+⨯⨯=8.8215264d U V=⨯⨯=*(1)12(12150.35)(215) 4.6u d p s p s U U K K K K V γ=+=⨯+⨯⨯⨯=5%s ≤()s n s n D N N -∆=1/1015002%/98%N n =⨯∆⨯15002%/98%10 3.06/min N n r ∆=⨯⨯=()7.31106.3/1001/=-=-∆∆=cl op n n K()()12881511=⨯+=∆+=∆cl op n K n()()rpm K n n op cl 13.4301/1281/=+=+∆=∆937.1/21=∆∆cl cl n n()()/22012.5 1.5/1500201.25/15000.134min/N N a ee n U I R C C V r=-⨯⇒=-⨯==()//12.5 3.3/0.134307.836/minN N eop N e n U I R C n I R C r ∑∑=-⨯⇒∆=⨯=⨯=()()/1150010%/20*90%8.33/min N N n n s D s r ∆=-=⨯=()min/33.8r n cl =∆()()()()[]()()[]K C R I K KU K C R I U K K n e d n e d n s p +-+=+-=**1/1/1/α()/1307.836/8.33135.955op cl K n n =∆∆-=-=()()()150035.95515/135.95512.5 3.3/0.134135.955α⎡⎤=⎡⨯+⎤-⨯+⎣⎦⎣⎦r V min/0096.0=⇒α*35.955*0.13414.34*35*0.0096e p s K C K K α===n U U n nα=≈*01.0150015*===n U n α /p e s K KC K α=()35.9550.134/350.0113.76p K =⨯⨯=N dbl I I 2≤N dcr I I 2.1≥A I I N dbl 252=≤A I I N dcr 152.1=≥s com s com dcr R U R U I /15/=⇒=()()Ω=⇒+=⇒+≈5.1/1525/*s s com s com n dbl R R U R U U I V U com 5.225.115=⨯=()(/3) 1.0 1.50.8/3 1.1,(/3)1.1,s s R R R R ∑∑=++=Ω>=Ω不符合要求,取需加电流反馈放大器1.1s R =Ω15 1.116.5com dcr s U I R V =⨯=⨯=dcr d I I >()[]()()[]()[]()()()[]()()()[]K C I R K K K R K C U K U K K K C RI K C U I R K K K K C U K K n e d s i s p e com i n s p e d e com d s i s p e n s p ++-++=+-+--+=1/1/1/1/1/**()()()**//dbl p s n i com p s i s n i com i s I K K U K U R K K K R U K U K R =++≈+()()251516.5/1.115/22.513.5 1.36i i i K K K =+⇒=-=22GD =1.6NmmH L 50=226.1Nm GD = 3.3R ∑=Ω0.134/e C V rpm =()()2/0.05/3.30.015/375 1.6 3.3/3750.1340.13430/3.145.28/64.330.0820.00333l m e m s T L R sT GD R C C s T s∑∑=====⨯⨯⨯⨯===()()222/0.0820.0150.003330.00333/0.0151*0.003330.00150.00333/0.0000498330.52l m l s s s K T T T T T T ⎡⎤⎡⎤<++=⨯++⎣⎦⎣⎦⎡⎤=+=⎣⎦() kW P N 8.2=V U N 220=A I N 6.15=1500=N n a R rec R L R 35=s K30=D s30=D %10=s30=D %10=s V U n10*=N d I I =N n n =αp K()r V C e m in/1311.01500/5.16.15220=⨯-=()min 0min /15.6 3.3/0.1311392.68/min 1500/3050/392.68/392.685088.7%op N e op n I R C r n s n n ∑∆=⨯=⨯====∆∆=+=()min/56.59.0/550/1.0r n n n ==∆+∆∆=()()⎪⎩⎪⎨⎧=+-+=∑e s p e d e n s p C K K K K C I R K C U K K n /1/1/*α ()()()()()⎪⎩⎪⎨⎧=-=-∆∆=+-+=∑5.52156.5/48.2971/1/6.151/1500*cl op e e n s p n n K K C R K C U K K MHz 1f 0=min /r 1500n =min /r 150n =min /465.101.0410246060r ZT Q c =⨯⨯==→=cZT M n 160min /1500r n =10246001.0102441500601=⨯⨯⨯==c nZT Mmin /150r n =4.1026001.010*********=⨯⨯⨯==c nZT Mmin /1500r %098.0%10010241%1001%1max =⨯=⨯=M δ min /150r %98.0%1004.1021%1001%1max =⨯=⨯=M δmin /1500r n =min /17115004102510160150041024606202r Zn f Zn Q =⨯⨯-⨯⨯⨯⨯=-=min /150r n =min /55.1150410241016015041024606202r Zn f Zn Q =⨯⨯-⨯⨯⨯⨯=-= 260ZM f n =Zn f M 0260=min /1500r n =77.9150041024106062=⨯⨯⨯=M min /150r n =7.9715041024106062=⨯⨯⨯=M min /1500r n =%4.11%100177.91%10011%2max =⨯-=⨯-=M δmin /150r n =%1%10017.971%10011%2max =⨯-=⨯-=M δ习题三*nmU N n N I R s K e C *n U dL I n n U *i U i U c U *i U c U*****0*/15/15000.01/55,5000.01/150.375/400.375*10 3.750.127*50010*24.17520500,5, 3.75,nm N nnim dm i d i d dL e N dL C s s s n i i c U n V rpm V rpmU VU V n rpmV rpmU V V AI AU I V U U E I R C n I R U V K K K n rpm U V U U V U ααββ==============+++=========当转速即4.175v=V I U dm i 15*==β()040*2420e d d dm c s s s C n I R U I R U V K K K +=====N P N U N I N n R cm im nmU U U ==**dm I s K βα,0d U c i i U U U ,,***880.2/0.008/401000im nm dm N U V U V V AV rpmI An rpmβα======040*1.560d dl e N dl U E I R C n I R A V∑∑=+=+=Ω=*8,0n n U V U ==*8,8,i i U V U V ==06040 1.5C d S U U K V ===*im U *i U c U c U*80.1/80im dm U V V A I Aβ===⇒*i U ⇒C U C U 0d dl e N dl U E I R C n I R ∑∑=+=+()0e d d c ss C n I R U U K K +==σ(1)(2)s t r t (3)r t σ0.69,0.6,%9.5%KT ξσ===(1)0.69/0.69/0.1 6.9(1/)K T s ===(2)3.30.33r t T S ==3660.10.6s nt T s ξω≈==⨯=0.25r t s <1,0.5KT ξ== 2.4 2.4*0.10.24r t T s ===1/10K T ==101.0101)(1+=+=s s K s W obj τσ0.5,0.707,3-1% 4.3%KT ξσ===查表,得1(),W s sτ=110(),T 0.01(0.011)W s s s ττ=+这样,=, K=10/10/10/500.2K Sτ===11()0.2W s s sτ==)102.0(10)1()(1+=+=s s Ts s K s W obj σ1(1)(1)(),()(1)PI PIPI K s K s K W s W s s s s Ts ττττ++==+校正后系统的开环传递函数 1/,h 83-4PI K K K hT ττσ==,选=, 查表, %=27.2%8*0.020.16hT s τ===12222181175.78,/175.78*0.16/10 2.8122*8*0.02PI h K K K K h T τ++======60=N P 220=N U 308=N I 1000=N n e C R s K l T m T i T 0n T 0i σn σ1.1N IΩk*/8/(1.1*)8/3390.0236/im dm N U I V I V A V A β====10/10000.01min/V r α==)0.00333s a T s =)0.0025oi b T s =0)0.00250.003330.00583i i s c T T T s ∑=+=+=5%i σ≤(1)()i i ACR i K S W S Sττ+=10.012,0.5,0.5/85.76i l I i I i T s K T K T s τ-∑∑=====选85.760.0120.180.224350.0173I i i s K R K K τβ⨯⨯===⨯185.76ci I K s ω-==040R K=00.224408.96i i R K R K K ==⨯=33000/0.012/(910) 1.334/40.0025/40100.25i i i i i C R F C T R Fτμμ==⨯===⨯⨯=a)1/I K 0.5I i K T ∑=1/220.005830.01166I i K T s ∑==⨯=b)0.015on T s =c)1/0.011660.0150.02666n I on T K T s ∑=+=+=(1)()n n ASR n K s W s sττ+=,5,0.1333n n n n hT h hT s ττ∑∑====取2222216168.822250.02666(1)60.02360.1960.126.942250.010.180.02666N n e m n n h K s h T h C T K h RT βα-∑∑+===⨯⨯+⨯⨯⨯===⨯⨯⨯⨯11/168.820.133322.5cn N N n K K s ωωτ-===⨯=0.07998n n hT s τ∑==2222(1)/24/(290.02666)312.656(1)/240.02360.1960.12/(230.010.180.02666)7.6N n n e m n K h h T sK h C T h RT βα-∑∑=+=⨯⨯==+=⨯⨯⨯⨯⨯⨯⨯=11/312.6560.0799825cn N N n K K s ωωτ-===⨯=1/21/211/21/21)1/3(/)1/3(85.76/0.00583)40.43)1/3(/)1/3(85.76/0.015)25.2I i cn I on cna K T sb K T s ωω-∑-==>==>272.2% 1.1(3080.18/0.1961000)(0.02666/0.12)9.97%10%n σ=⨯⨯⨯⨯⨯⨯=<040R K =07.640304n n R K R K =⨯=⨯=330/0.07998/310100.2584/40.015/4010 1.5n n n on on C R F C T R Fτμμ==⨯===⨯⨯=%272.2%(1.10.4)(3080.18/0.196100)(0.02666/0.12)63.5%n σ=⨯⨯-⨯⨯⨯⨯=222()(),()375375375m dm dL dm dL e L dm dLe mem eGD dndn C I I R I I R T T I I GD GD R dtdt C T C C C --=-===-根据电机运动方程:*0.196*0.12*10000.385()(1.1*3080)*0.18e m dm dL C T n t sI I R ===--l T m T i T 0n T 0i σn σci ωcn ω**100.00877/1.5*760100.0267min/375im dm nmN U V AI U V r n βα======)0.00176)0.002)0.00367S oi i a T s b T s c T s∑===T l /T ∑i ==<10 τi =T l =/136.240.0310.14/750.008770.899i I I s K K T R K β==⨯⨯⨯=00.8994035.96i i R K R =⨯=⨯=33000/0.031/36100.864/40.002/40100.2i i i i i C T R F C T R fμμ==⨯===⨯⨯=确定时间常数:a) 电流环等效时间常数1/K I :因为K I T ∑i = 则1/K I =2T ∑i =2*= b) b)T on =c) c)T ∑n =1/K I +T on =+= 速度调节器结构确定:按照无静差的要求,应选用PI 调节器, W ASR (s)=K n (τn s+1)/τn s 速度调节器参数确定:τn =hT ∑n ,选h=5,则τn =hT ∑n =, K N =(h+1)/(2h 2T 2∑n )=6/2*25*= s -2 K n =(h+1)βC e T m /(2h αRT ∑n )= 6***2*5***= 可见满足近似等效条件。
电力拖动自动控制系统-第四版-课后答案

习题解答(供参考)习题二2.2系统的谒速花用肚1000700"min .耍求补差净.*2%•那么系统允许的柑琏转速降肚多少?解:An = "'%(]_ $)= 1000x0.02/(10x0.98) = 2Mrpm系统允许的於态速降为2.04rpm.23某一调速系统.在颤定负敎下.最高转速持性为n()max =1500〃min .最低转連转忡为n Omin = 150r/min .匸制定勺我时的速度需必A/z jV = 15r/min・H征不阿转速下離定速降不变.试问系统能够达到的调速苞IH有多大?系统允许的静差率是多少?躺I〉调速苞Ml D = qnax/^min (均指颤定负较倩况卜)"max =«0max-^=1500-15 = 1485"min =W0min-^=150-15 = 135D = "max /"min = 1485/135 = 112)s>泾率s = A/i jV/H() = 15/150 = 10%2.4 ffift电动机为P^=74k\V.UN=22OV・I S=378A. n N=l43<)r/min. Ra=O.O23Q・相拎矗流器内Hl Rrcc=O.O22Q •采用降川说速・当生产机械耍求s=20%时.求系统的调速范|同・如果s=30%时.則系统的诡速范国乂为参少??鶴Ce = (U N -I N R a)/n N = (220-378x0.023)/1430 = 0.1478V/r/;/nAn = I N R/Ce = 378 x (0.023 + 0.022)/0.1478 = 11 SrpmD = n N S/[An(l- s)] = 1430x 0.2/[115x(1-0.2)] = 3.1D = gS/[42(l -s)] = 1430x0.3/(115x(1 — 03)] = 5.332.5某龙门刨床工作台采用W 说速系统.Lifeftift电动机.主电略总电闪R=O.!=O.2V-miiVr.求:<1)当电迩连续时.在额定负枝下的转i£降«A/2 v为多少?<2)开坏系统机植待杵连续用在额定转速时的鵝遂瘵S N姜少?<3) 2;鉴满足D=2(UW5盘的要求.额定负枝卜的转谨降落乂为多少?解:⑴ 4切=/ v x R/Ce = 305x0.18/0.2 = 274.5r/min⑵S N =An^/WQ =274.5/(1000 + 274.5) = 21.5%⑶ An = n N S/[D(L-s)] = 1000x0.05/[20x0.95] = 2.63/7 min心有一能稱管稳b电源•英杨态结构图如图所小•已知給定电压t/* = 8.8V.比例灣节器放大系数Kp=2.晶棉管褻n放大系数Ks =15、反惯系&Y =0.7 •求:(!) ?fi出电JK U d : (2)若耙反懺线断JF・t/d为冃值?开坏时的输出电爪址闭环楚的炙少倍?(3)若把反懺系数械至丫=0.35・当探持同样的输出电爪时.給定电矗U:应为多少?解:(1)Ud = KpKsU;JQ + KpKy) = 2x\5x&8/(1+2x15x0.7) = 12V⑵U d =8.8x2x15 = 264V .歼坏輛出电i&楚闭坏的22倍⑶ u: = Ud(1 + KpKy)[KpK, = 12X(1 + 2X15X0.35)/(2X15) = 4.6V2.7某闭坏调速系统的说速范闹足I500r/min-i50r/min.耍求系统的<5% •那么系统允许的朴念速降足参少?如果开坏系统的挣念速障楚100r/min.则闭坏系统的开坏放大倍数应有多大?解:I〉D = n N s/^n N(i-s)10 = 1500x2%/^ x98%沁=1500X2%/98%X10= 3.06r / min2)K =(4切 /A K C/)-1 = 100/3.06-1 = 31.728某闭坏调速系统的幵坏仮大侪数为15时.做定致我卜电动机的如渠将开坏妝大侪数提高到30・它的速降为多少?在同样卿羌率要求下.调速范用训以扩夫多少倍?給 4 伽=(1+K)4Q =(1+15)X8=128如和务开坏仮大倍数扯高到30.則速降为:△“ = △% /(1 + K)= 128 /(1 + 30)= 4.13rpm在同样舲養率婪求下.D町以U' A A/J C7I/△灯宀2 = 1937倍2.9 有V-M 速系统:电动机^tti. PN=2.2kW. U N=220V. k=l2.5A. nx=!5O() r/mm•电枢电M1RR.5Q•电枢何賂电抗2t电Bl RL=0.8D・内Hl&cl.oafB发整就坏节的放夫倍融匕=35・鉴求系绒满足灣速范憎D=20・挣泾率S<TW・(丨〉计0开坏系统的於态速降和调速要求併允许的闭坏舲态igWAik,・<2) «用转速负反懺细成闭坏系统.试面出系统的嫌理图和挣念结构图.<3)说整该系统参数•使U a*=!5V时.L=k・2氏・則转速负反馈系散a应该址多少?<4)计算敞大冷所需的放大倍数・解:⑴n = (t/jV-/v x/?J/C rC r =(220-12.5x1.5)/1500 = 201.25/1500 = 0.134VmiiVrn = (U N-I N xR z)/C f=> 叫=I N x/?z/C r =12.5x33/0.134 = 307.836厂 / minA/i jV = y/(D(l-5)) = 1500x10%/(20*90%) = 8.33r / min所以.A/2C/ = 8.33r/ninUPE<3> ⑷ « =(K p K s U ; - I d R )/(C e (1 + /r)) = \KU ; /«(1 + K )\-\l d R!{C e (1 + /C ))]1500 = [35.955 x 15/a(l + 35.955)]- =>a = 0.0096VmiiVr“ 35.955*0.134|1Q1讥n 电冋 代e = ----------- = ------------------- = 14.P K^a 35*0.0096也叫以川粗昭算法:心=KC /Ka . K p = 35.955x0.134/(35x0.01) = 13.762.10在題2.9的转速负反懺系统中堆设电就嚴止环节.婪求坍转电漁I 伽 -2/jV •临界蔵止电渝I dcr > 1.2/ v •应该选用多大的比 较电用和电祓反愤采样电川?要求电加反馈采样电锻不超过主电路总电阻的1/3 •如果做不到.需要增加电渝反愤放大器.试阪出系统的坝理图和 协念结构I 轧并计荒电流反惯放大系数・这时电流反馈采样电HI 和比较电**为多少?解:⑴ I dbl< 21N = 25 A . I dcr > 1.2/,v =\5Adcr = U com 【d 15 = U com / R s/伽 Ju ; +/爲/儿亠25 = (15 + /爲/& 7 = 1.5Q •% =15x1.5 = 22"(堆/3) = (1.0+1.5 + 0.8)/3 = l.lC, & >(他/3) "不符合要求,取& =1.10,需加电流反馈放大器由f-ffis 的检测电阻<a 大.说明耍求的电流馆号值也大.要冋时输足检测电阻小和电淹佰号大的要求.則必须采用放大器.对电潦倍号进行 故大.为此.K=[\n op ! \n d )-\ =307.836/&33-1 = 35.95512.5x33/(0」34(1+ 35.955))]十取R、=l•则U ami =/frr x/?v = 15xl.l = 16.5 V<3)当 /rf > Rh 有n = [K“K.M; /C」l + K)\-kpK$Kg + K)]-[刃d /q(l + K)]=Kp K 血;+ KjU』(q (1 + K))]— [(/? + K p K s K. R s)l d/(c e (1 + K))]当n=0时・/斷=KpK, (U; + K i U nm)/(R + KpKKRA(U: + KQ® J / K,R S25 = (15 + 16.5K f)/l・I£=15/(22・5-13・5) = 1・362.11在崔2.9的集统中.”左电滋电憋L=5(>mH・系统运动殊分的E轮惻/GD‘ = l・6Nm‘・廉渝装肚嚥用询冬式电豁.试月斷按匙2・9 箜求设计的转速负反惯系统能否处定运行?如鉴保证系统艳定运行・允许的必人开坏放大系数处篡少?執L = 5O//Z/7 . GD2 =\.6Nm2.饱=3・3G. C e =0A34V / rpm7; =L//?Z =0.05/33 = 0.01557;=GD2/?Z/(375C,C W)=1.6X3.3/(375X0.134X0.134X30/3.14)= 5.28/64.33 = 0.082.?7; =0.003335K < [匚(7; + 耳)+ 4订 / 7/、= [0.082 x(0.015 + O.OO333)+ O.OO3332] /(0.0151* 0.00333) =「0.0015 + 0.003332] / 0.00004983 = 30.52 '" 与MU面的K>35.955相矛盾.故系统不枪定.要使系统能給矗定运行・KhU为30.52・2.12有一个阳用■电动机调U系统.己知:电动机:P v = 2.SkW・U N = 220V z・I N = 15.6A・n N = 1500r/mn.R a =1.50.整流装置内阻&”=1C,电枢同路电抗器电HI /?L=o.8Q・触发整流环节的故大倍数K$=35.⑴系统开环工作时.试计并调速范闱D = 30时的存走率S值・⑵当£) = 30. $ = 10%时・计并集统允许的稳念速障・⑶如组成转速负反馈有静荃调速系统•姜求£) = 30・5 = 10%・在U; = 10U时I d = I N・n = n N・计口转速负反馈系tta 和枚大容枚大系散Kp・解:C e =(220-15.6x1.5)/1500 = 0.1311 V min/ r% = I N x 堆 / q = 15.6x 3.3 / 0.1311 = 392.68厂 / min叫稣=1500/30 = 50s =叽卩 / A/z()min = 392.68 / (392.68 + 50) = 88.7%0.1 = An/(4? + 50)An = 5/0.9 = 5.56/7 min"=KpK’U: /C t,(l + K)-RJdGQ + K)[ K = K p aKJC e1500 = KpKJZ: /C'l + K)-(甩15.6)/Ce(l + K)K =(M°p /△“)— 1 =(297.48/5.56)-1 = 52.52-13雄转輪码JRJtMl数1024.借频系数4・高频时钟咏冲频率f()= 1MHz・旋转编码蹄出的脉冲个数和高频时仲M:冲个&均采川16位计数益.法测速时闾为o.oh求Kiin = 150017 min和n = 150r/miii时的测速分圳率和俣筮冷以大值.«M500,/mi n.^% = ^xim% = ^x 100% = H,4%“=150R /MI 11 B B^% =A 77TTX ,00% =^TTX I00% = 1%可见T 法适含低速60<I )M 法:分辨率。
电力拖动自动控制系统_第四版_课后答案思考题
2-1 直流电动机有哪几种调速方法?答:调压调速,弱磁调速,转子回路串电阻调速,变频调速。
2-2 简述直流 PWM 变换器电路的基本结构.答:直流 PWM 变换器基本结构如图,包括 IGBT 和续流二极管。
三相交流电经过整流滤波后送往直流 PWM 变换器,通过改变直流 PWM 变换器中 IGBT 的控制脉冲占空比,来调节直流 PWM 变换器输出电压大小,二极管起续流作用。
2-3 直流 PWM 变换器输出电压的特征是什么?答:脉动直流电压。
2-4 为什么直流 PWM 变换器-电动机系统比 V-M 系统能够获得更好的动态性能?答:直流 PWM 变换器和晶闸管整流装置均可看作是一阶惯性环节。
其中直流 PWM 变换器的时间常数 Ts 等于其 IGBT 控制脉冲周期(1/fc),而晶闸管整流装置的时间常数 Ts 通常取其最大失控时间的一半(1/(2mf)。
因 fc 通常为 kHz 级,而 f 通常为工频(50 或 60Hz)为一周内),m 整流电压的脉波数,通常也不会超过 20,故直流 PWM 变换器时间常数通常比晶闸管整流装置时间常数更小,从而响应更快,动态性能更好。
2-5 在直流脉宽调速系统中,当电动机停止不动时,电枢两端是否还有电压?电路中是否还有电流?为什么?答:电枢两端还有电压,因为在直流脉宽调速系统中,电动机电枢两端电压仅取决于直流 PWM 变换器的输出。
电枢回路中还有电流,因为电枢电压和电枢电阻的存在。
2-6 直流 PWM 变换器主电路中反并联二极管有何作用?如果二极管断路会产生什么后果?答:为电动机提供续流通道。
若二极管断路则会使电动机在电枢电压瞬时值为零时产生过电压。
2-7 直流 PWM 变换器的开关频率是否越高越好?为什么?答:不是。
因为若开关频率非常高,当给直流电动机供电时,有可能导致电枢电流还未上升至负载电流时,就已经开始下降了,从而导致平均电流总小于负载电流,电机无法运转。
2-8 泵升电压是怎样产生的?对系统有何影响?如何抑制?答:泵升电压是当电动机工作于回馈制动状态时,由于二极管整流器的单向导电性,使得电动机由动能转变为的电能不能通过整流装置反馈回交流电网,而只能向滤波电容充电,造成电容两端电压升高。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
电力拖动自动控制系统(第四版)习题答案_陈伯时《电力拖动自动控制系统—运动控制系统》习题2-2 调速系统的调速范围是 1000~100r/min ,要求静差率 s=2%,那么系统允许的稳态速降是 多少?解:系统允许的稳态速降sn 0 02 × 100min ∆ n N == = 2 04( r min ) ( 1 − s ) ( 1 − 0 02)2-5 某龙门刨床工作台采用晶闸管整流器-电动机调速系统。
已知直流电动机= 60 k W ,P N U N = 220 V , I N = 305 A , n N = 1000 r min , 主 电 路 总 电 阻 R = 0 18Ω ,C e = 0 2 V • min r ,求:(1)当电流连续时,在额定负载下的转速降落 ∆n 为多少? N (2)开环系统机械特性连续段在额定转速时的静差率 s 多少? N(3)额定负载下的转速降落 ∆n 为多少,才能满足 D = 20, s ≤ 5% 的要求。
N 解:(1)当电流连续时,在额定负载下的转速降落I R 305 × 0 18N∆n = = = 274 5( r min ) N C 0 2 e (2)开环系统机械特性连续段在额定转速时的静差率∆ n 274 5N s = = ≈ 0 215 = 21 5%N n + ∆ n 1000 + 274 5N N (3)额定负载下满足 D = 20, s ≤ 5% 要求的转速降落n s 1000 × 0 05N ∆ n == ≈ 2 63( r min ) N D ( 1 − s ) 20 × ( 1 − 0 05)*2-6 有一晶闸管稳压电源,其稳态结构如图所示,已知给定电压U u = 8 8 V , 比例调节放大系数 K = 2, 晶闸管装置放大系数 K = 15, 反馈系数 γ = 0 7 。
求: p s(1)输出电压 U ;d (2)若把反馈线断开, U 为何值?开环时的输出电压是闭环时的多少倍? d (3)若把反馈系数减至γ = 0.3 5 U 应为多少?u 解:(1)输出电压K K2 × 15 p s *U = U = × 8 8 = 12( V ) ;d u 1 + K K γ 1 + 2 × 15 × 0 7p s *(2)若把反馈线断开, U = K K U = 2 × 15 × 8 8 = 264 ( V) ;开环时的输出电压是闭环 d p s u时的 264 12 = 22 倍。
(3)若把反馈系数减至 γ = 0.35 ,当保持同样的输出电压时,给定电压 1 + K K γ 1 + 2 × 15 × 0 35 *p s U = U = × 12 = 4 6( V ) 。
u d K K 2 × 15p sU − I R 220 − 12.5 ×1.5 N d a 解:(1) C == = 0.1341 V ⋅ min/ r e n 1500 NRI 12.5 × (1.5 + 1.0 + 0.8) N∆ n = = = 307.6 r / minop C 0.1341 e n s 1500 × 0.1 N∆ n = ≤ = 8.33 r / mincl D (1 − s ) 20 × (1 − 0.1) (2)(3)∆n307.6op(4)闭环系统的开环放大系数为K = −1 = −1 = 35.93∆n8.33clK 35.93运算放大器所需的放大倍数K = = = 13.77p K α/ C 35 ×0.01 / 0.1341s e解:R = 4.8 ΩR / R = 0.3125 < 1 / 3s图见 49页解:计算系统中各环节的时间常数L 0.05电磁时间常数T = = = 0.02 sl R 1.5 + 1.02GD R 1.6 ×(1.5 +1.0 + 0.8)机电时间常数T = = = 0.082 sm 375 C C 30e m 375 ×0.1341 ××0.1341π晶闸管装置的滞后时间常数为T = 0.00167 ss为保证系统稳定,应满足的稳定条件:2 2T ( T + T ) + T 0.082 ×(0.02 + 0.00167) + 0.00167m l s sK < = = 53.29 T T0.02 ×0.00167l s可以稳定运行,最大开环放大系数是 53.29P N2-12有一晶闸管-电动机调速系统,已知:电动机= 2.8 k W ,U N = 220 V,I N = 15.6 A ,n N = 1500 r min ,R = 1 5 Ω,整流装置内阻 R = 1Ω,电枢回路电抗器电阻R = 0 8 Ω,a rec L触发整流环节的放大倍数K = 35 。
求:s(1)系统开环时,试计算调速范围= 30 D 时的静差率 s。
(2)当D = 30, s= 10% 时,计算系统允许的稳态速降。
* (3)如组成转速负反馈有静差调速系统,要求 D = 30, s = 10% ,在U = 10V 时 I = I , n d N n = n ,计算转速反馈系数α 和放大器放大系数 K 。
N p 解:先计算电动机的反电动势系数U − I R 220 − 15 6 × 1 5 N N aC = = = 0 131 (V • min r ) en 1500 N系统开环时的额定转速降落I ( R + R + R ) 15 6 × ( 1 5 + 1 + 0 8) N a rec L ∆ n == ≈ 393 ( r min)Nop C 0 131 e(1)系统开环时,调速范围 D = 30 时的静差率D ∆ n 30 × 393 N s = = ≈ 0 887 = 88.7 % ;n + D ∆ n 1500 + 30 × 393N N (2)当 D = 30, s = 10% 时,系统允许的稳态速降n s 1500 × 0 1 N∆ n = =≈ 5 56( r min ) N D ( 1 − s ) 30 × ( 1 − 0 1 ) (3)如组成转速负反馈有静差调速系统,要求 D = 30, s = 10% ,则系统开环放大系数 ∆ n 393 op K = − 1 = − 1 ≈ 69.6 8 ;∆ n 5 56 cl *U n 10转速反馈系数 α == ≈ 0 0067( V • min r ) n 1500 N KC 69 .6 8 × 0 131 e放大器放大系数 K = = ≈38.9 3 。
p K α 35 × 0 0067 s 2-13 旋转编码器光栅数为 1024,倍数系数为 4,高频时时钟脉冲频率 f = 1MHz ,旋转编 0 码器输出的脉冲个数和高频时钟脉冲个数均采用 16 位计算器,M 法和 T 法测速时间均为 0.01s ,求转速 n=1500r/min 和 n=150r/min 时的测速分辨率和误差率最大值。
解:(1)M 法测速60 60转速 n=1500r/min 和 n=150r/min 时的测速分辨率Q == ≈ 1 465 ZT 1024 × 4 × 0 01 cnZT 1500 × 4096 × 0 01 c 转速 n=1500r/min 时, M = = = 1024 ,误差率最大值 160 601 1δ = = ≈ 0 00097 = 0 097% ;max M 10241 nZT 150 × 4096 × 0 01 c 转速 n=150r/min 时, M = = = 102 4 ,误差率最大值 160 601 1δ = = ≈ 0 0097 = 0 97% 。
max M 102 4 1(2)T 法测速660 f 60 × 1 × 10 0转速 n=1500r/min 时, M = = ≈ 9 8 ,测速分辨率 2 Zn 4096 × 1500 2 2Zn 4096 × 1500 Q = = ≈ 171 660 f − Zn 60 × 1 × 10 − 4096 × 1500 0误差率最大值1 1δ == ≈ 0 103 = 10 3% 。
max M − 1 9 8 − 12 6 60 f 60 × 1 × 10 0 转速 n=150r/min 时, M = = ≈ 98 ,测速分辨率2 Zn 4096 ×150 2 2Zn 4096 × 150 Q = = ≈ 1.55 660 f − Zn 60 × 1 × 10 − 4096 × 150 0误差率最大值1 1δ == ≈ 0 0103 = 1 03% 。
max M − 1 98 − 12 3-1 双 闭 环 直 流 调 速 系 统 的 ASR 和 ACR 均 为 PI 调 节 器 , 设 系 统 最 大 给 定 电 压* *U = = 15V , n N = 1500 r min , I = 20A ,电流过载倍数为 2,电枢回路总电阻nm U im N R = 2Ω , K = 20 , C e = 0 127 V ⋅ min r ,求:s *(1)当系统稳定运行在 U n = 5V , I = 10A 时,系统的 n 、 U 、 U 、 U 和 U 各为多少? dL n i i cU 和 U 各为多少? i c解:转速反馈系数*U 15 nm α = = = 0 01 (V ⋅ min r )n 1500N 电流反馈系数* U 15 im β = = = 0 375 (V A )I 2 × 20dm (1)当系统稳定运行在 U n = 5V , = 10A I 时, dL*== 5( V ) n U n *U 5 n n = = = 500( r min )α 0 01 U = βI = 0 375 × 10 = 3 75( V )i dL *U = U = 3 75( V )i i U C n + I R 0 127 × 500 + 10 × 2d 0e dL U = = = = 4 175 (V ) 。