激光主动照明成像技术_分析和实验证明_王智
激光主动成像技术综述

0引言激光主动成像具有分辨率高、抗干扰性好等优势。
因此该技术被越来越多的应用于侦查、制导、导航、测绘等领域。
围绕着激光主动成像这一课题,形成了多个研究热点,多项技术快速发展。
本文介绍并分析了激光主动成像的一些相关技术和研究成果,这些技术应用前景较为广泛,引领着未来激光成像的发展方向。
1成像机制激光成像技术受成像探测器的制约,分为扫描成像和非扫描成像两种[1]。
1.1扫描型激光主动成像扫描型激光成像技术发展较早,多应用于成像速率要求不高的系统中。
本文列出了几种主要的扫描模式,论述原理,分析优缺点,如表1所示。
作者简介:王燕(1984-),女,硕士,工程师,主要从事激光导引信息处理技术研究。
激光主动成像技术综述Overview of Laser Active Imaging Technology王燕1,王鹏辉1,2(1.中国空空导弹研究院,河南洛阳471009;2.航空制导武器航空科技重点实验室,河南洛阳471009)Wang Yan 1,Wang Peng-hui 1,2(1.China Airborne Missile Academy,Henan Luoyang 471009;2.Aviation Key Laboratory of Science and Technology on Airborne Guided Weapons,Henan Luoyang 471009)摘要:激光主动成像技术是正在快速发展的前沿技术,其应用前景非常广泛。
该文介绍了不同的激光成像体制、激光成像图片的信息处理技术、以及激光成像的目标识别算法等,分析了这些技术的原理、特点和适用场景。
关键词:成像体制;信息处理;目标识别中图分类号:TN249文献标识码:A文章编号:1003-0107(2019)07-0001-03Abstract:Laser active imaging technology is a rapidly developing advanced technology,and its application prospects are very wide.This paper introduces different laser imaging systems,information processing tech-nologies of laser images,and target recognition algorithms of laser imaging.The principles,characteristics and applicable scenarios of these technologies are analyzed.Key words:imaging systems;information processing;target recognition CLC number:TN249Document code:AArticle ID :1003-0107(2019)07-0001-03表1扫描型激光成像系统测试测量技术1电子质量2019年第07期(总第388期)1.2非扫描型激光主动成像1.2.1基于APD探测器的激光主动成像1.2.1.1盖革模式APD雪崩管阵列探测器盖革模式的雪崩管阵列探测器中的每个像元都集成了距离计数器。
激光主动探测系统成像性能评价方法综述
关 键 词 : 光 主 动 成 像 ; 能评 价 ; 光 主动 探 测 系统 激 性 激
加拿 大国防研 究和评估 委员会的 G..o rir 人利 用 R F une 等
对 L C E L s rU d r t r a r ma e E h n e )系 U I (a e n e wa e me a I g n a c r C
U L W I S系统前一 次的参数修正 能否提 高对 目标 的成 像质量 , 灰度 图像 和距离 像 , 该成像 仿真 系统 已经成 为 系统成 像性 能 以及 对 U L W I S与其他 成像 系统在 不 同作 用距 离、 同浑 浊 分析 研究和系统 的参数优化 的重要工 具。 不 度 的水质 等情 形下工 作时 的系统成 像性 能进行 了比较 , 出 指 美国军方研 究实验室 ( myR s ac a oaoy 开 发 Ar e e rhL b rtr)
11 国外研究情况 .
国外对 激 光主动成 像探测 技术 的研 究较 为成熟 , 方发 西
达 国家 已经有相 应 的产品 用于搜寻 和救援 等军 事用途 , 系 在
统成像 性能及 其评价 方面 的研 究开展 的也较早 , 要 以评价 图 1距离为 2 m、k 主 k 8m时单帧和 多帧叠加后图像可读性测试结果
瑞 典 国防研 究 中 心的 Ov t iv l 人 为解 决调 制传 eS en al 等
利用激光 的高亮度、 高准 直性 、 单色性好等特 点对 目标进行 主 递 函数和对 比度 在成像 性能评 价中 的局 限性 , 出了利 用 图 提 动 照明 , 服 了这些缺 点 , 远距 离、 目标 探测等领 域有着 像可读性 来测试 目标 图像质量 以达 到对系统成 像性能进行评 克 在 喑21 0 0年第 2 5来自 ( 第 1 0期 ) 总 6
激光主动照明光学系统设计

激光主动照明光学系统设计刘韬;胡玥;董健;申军立【摘要】为提高跟踪测量系统对暗弱目标的探测能力,设计一套自动化激光主动照明光学系统,对跟踪测量视场范围进行主动辅助照明。
该系统在0.2~5 km距离处的照明直径均为10 m,计算出其在-20℃及+45℃的温度调焦量,照明仿真结果表明系统照明不均匀性<15%。
通过研究系统像差对照明均匀性的影响,以及对设计的调光组进行分析,得到调光组移动量与照明距离之间的理论关系,表明自动调节调光组位置即可实现不同照明距离处的均匀照明。
设计和分析结果表明,该主动照明系统能够自动调节调光组位置,实现跟踪测量视场内的均匀照明,有利于跟踪测量系统对于暗弱目标的探测。
%In order to improve detection abilityof tracking system for the dim target,a set of automatic laser active illumination system is designed for actively illuminating the view field of tracking and measurement.The illumination diameter is always 10 metersat a distance of 0.2 km to 5 km away from the system.The amount of focusing group movement at -20 ℃ and 45 ℃ is given.The simulation results show that the illumination nonuniformity is less than 15%.By analyzing the optical aberration effects on the illumination uniformity and designed dimming group,the theoretical relationship between the dimming group movement and the illumina-tion distance is gotten.The design result shows that the illumination in different distances will be uniform by adjusting the dimming group position automatically.The design and analysis results show that laser active illu-mination system can accomplish uniform illumination for the view field of tracking andmeasurement by moving the dimming group,which is beneficial for the dim target detection and measurement.【期刊名称】《中国光学》【年(卷),期】2016(009)003【总页数】7页(P342-348)【关键词】激光主动照明;自动化;照度均匀【作者】刘韬;胡玥;董健;申军立【作者单位】中国科学院长春光学精密机械与物理研究所,吉林长春 130033;中国科学院长春光学精密机械与物理研究所,吉林长春 130033;中国科学院长春光学精密机械与物理研究所,吉林长春 130033;中国科学院长春光学精密机械与物理研究所,吉林长春 130033【正文语种】中文【中图分类】TN202随着激光技术、成像技术和计算技术的日趋成熟,光电跟踪测量设备需要更好地适应复杂背景的需求。
半导体激光主动成像雷达扫描成像实验

半导体激光主动成像雷达扫描成像实验3成向阳 李 宁 王海虹 尚铁梁 王 骐(哈尔滨工业大学光电子技术研究所,哈尔滨,150001)摘要:对激光主动成像雷达做了一些初步的理论与实验研究,建立了一个半导体激光扫描成像演示系统,利用雷达距离方程计算了系统的最大作用距离,并在实验室做了成像实验。
在实验室内获得了10帧/s 、每帧32行的轮廓像,且成像质量较高。
关键词:LD 雷达 扫描成像 主动成像 作用距离Scanning imaging by LD laser active radarCheng Xiangyang ,L i N i ng ,W ang Haihong ,S hang Tieliang ,W ang Qi(Institute of Opto 2Electronics ,Harbin Institute of Technology ,Harbin ,150001)Abstract :Theoretical and experimental studies have been done on laser active imaging radar.Alaser scanning imaging demonsttration system has been established.On the basis of radar distance equation ,maximum operation distance is calculated.On the ex perimental setup ,a figure picture with 10frames per second ,32rows per frame is obtained.The quality of the picture is very high.K ey w ords :LD laser scanning imaging active imaging operation distance引 言主动成像已成为现在及今后一段时期,激光雷达的主要研究方向[1,2]。
远距离激光照明选通成像技术的研究进展
d r i c h公 司 S U I 小组 J 、 加 拿大 的 O B Z .
远 距离 激光 照 明选 通成 像技 术作 为距 离选 通 激
E R V公 司 J 、 德 国光 电与模式 识别 研究 所 ( R e s e a r c h
光成 像 技术 的 主要 应 用 之 一 , 是 在 激 光 主 动 成 像 技 术 的基 础上 发展 起来 的。远距 离 激光 照 明选 通成像
・ 综述 与评论 ・
远 距 离 激 光 照 明选 通 成 像 技 术 的研 究 进 展
宋 岩峰 , 孙 卫平 , 刘 灏
( 中国兵器工业第 2 0 3研究所 , 陕西 西安 7 1 0 0 6 5 )
摘
要: 对远距离激光照明选通成像技术的基本原理进行 了论述。结合国外的典型装备 、 试验
机技 术 以及 高精 度 的延 时 同 步 控 制技 术 等 , 使 得远
距离 激 光照 明选 通 成 像 系 统 具 有 作 用距 离远 、 系 统
在 国内, 虽然也有一些单位在积极开展该技术
的研 究 , 但是 由于器 件等 原 因 , 目前 都 尚处于 理论研
究 和实 验 室 验 证 阶段 , 和 国外 相 比 还 有 较 大 的差
Re s e a r c h 0 n l o n g — r a ng e l a s e r i l l u mi n a t i n g
・ 1 ● ● J l ■
g at e a i m ag i ng t e c hni que
S ONG Ya n- f e n g, S UN We i - pi ng, L I U Ha o
( N o . 2 0 3 R e s e a r c h I n s t i t u t e o f C h i n a O r d n a n c e I n d u s t i r e s , X i a n 7 1 0 0 6 5 , C h i n a )
激光全息照象实验技巧
激光全息照象实验技巧
随着科技的进步,科学家们已经开发出了许多复杂的实验技术。
其中,激光全息照象实验方法就是一种非常有用的实验技术。
激光全息照象实验是一种用来研究物质态和相变的方法,它可以通过激光束和全息照象来测量物质的热力态变化。
激光全息照象实验技术主要由两部分组成:激光束控制技术和全息照象技术。
在激光束控制技术方面,光束的波长、偏振方向和幅度等参数都需要精确控制。
而在全息照象技术方面,可以根据激光束控制技术中获取的参数,对光束进行波面调制,从而获得全息照象。
在实验中,首先要准备好激光束控制系统和全息照象系统,以确保实验结果的准确性。
在激光束控制方面,要检查激光束的功率、偏振方向和幅度等。
同时,还要确保激光设备的温度有利于长期稳定的激光输出,减少实验误差。
然后,在全息照象系统中,需要经过两步。
首先是波面调制,即根据激光束参数调制全息照象。
然后是调整全息照象探测仪,以确保全息照象的精确性。
接下来,要开始实际的实验了。
在实验之前,要确保激光束的功率和全息照象的精确性,确保实验结果的准确性。
其次,在实验中,要使用较低的激光束功率和波束范围,以免损坏样品,影响实验结果的有效性。
此外,在实验中,还要注意样品的处理,确保其稳定性,以避免实验失败。
最后,在实验结束时,要对获得的数据进行计算和分析,以获得有效的结果。
虽然激光全息照象实验技术相对复杂,但是,只要掌握了常规的
技巧,它就可以让实验变得更加容易和准确。
因此,在研究物质态和相变方面,激光全息照象实验是一种非常有用的技术,是科学研究中的重要实验手段。
基于目标模型的激光主动成像仿真
rv ma i g s se a d t x a d t ea u to r ii gd t o be td t c n d n i c to lo iei gn y tm n oe p n h mo n ftan n a af ro j c ee ta die t ia in ag — f rt ms no d rt ee ts a il b tefc iey h a e r s n st er n eg td ls ra t ei ih .I r e od t c p ta jc fe t l ,t ep p rp e e t h a g - a e a e c i m— o e v v
仿 真具 体 步骤 为 : 1 )目标处 远场 光束 光 强 、 斑分 布 计 算 。根 散 据 激光 器 的功 率 、 散角 、 基平 台与 空 间 目标 之 发 天 间的距 离等 参数 , 定激 光 器 发 射 的初 始 激 光 光 确 束 经过 空 间传输 到达 空 间 目标 处 的 光 强 分 布 ; 假
一
把 激光 主动 成 像 技 术 应 用 于 空 间 目标 探 测 ,
目前还 不具 备利 用 实 际手段 获取 真 实空 间 目标 激 光 图像 的条 件 。而通 过半 实 物仿 真 的途径 模 拟接 近 真实 飞行 环境 成像 , 要借 助 大量 硬件 设备 , 需 造 价较 高 。因此对 激 光 主动 成 像 过 程 进 行 仿 真 , 获 得 目标 的激 光 主动 成 像 仿 真 图像 , 研 究 系统 整 是 体性 能 的有 效手 段 。 针对 IC C D建 模 与 仿 真 方 面 , 外 开 展 了一 国 些 研究 。但 由于 I C 的应 用 背 景 比 较 特 殊 , C D 相
适于高速成像的激光主动照明光路结构[实用新型专利]
![适于高速成像的激光主动照明光路结构[实用新型专利]](https://img.taocdn.com/s3/m/22de9ae1763231126edb11fc.png)
专利名称:适于高速成像的激光主动照明光路结构专利类型:实用新型专利
发明人:徐涛,梅雨,理玉龙,王峰,彭晓世
申请号:CN201720822686.1
申请日:20170707
公开号:CN206975330U
公开日:
20180206
专利内容由知识产权出版社提供
摘要:本实用新型公开了一种适于高速成像的激光主动照明光路结构,包括均呈中空结构的调节筒和固定筒,调节筒前端设有成像镜头,调节筒的后端与固定筒连接;固定筒的后端穿设有传光束,传光束由至少两根长度一致的多模光纤组成,固定筒内在传光束的出射光路上设有传光束耦合镜;固定筒内靠近前端的位置竖直设有光阑,光阑处于成像镜头的一倍焦面和二倍焦面之间,光阑孔处于传光束和传光束耦合镜所组成光学系统的出瞳位置,且光阑孔的尺寸小于或等于该光学系统的出瞳尺寸。
匀化了多模光纤带入的散斑,同时使照明区域内反射面的散斑对比度下降,改善反射面的成像效果,保持激光照明的相干性,结构稳定,适合主动照明的高速成像过程,具有极大的科研价值。
申请人:中国工程物理研究院激光聚变研究中心
地址:621900 四川省绵阳市游仙区919信箱985分箱
国籍:CN
代理机构:重庆为信知识产权代理事务所(普通合伙)
代理人:龙玉洪
更多信息请下载全文后查看。
基于光纹特征的激光主动照明图像去模糊
基于光纹特征的激光主动照明图像去模糊王灿进;石宁宁;孙涛;王锐【期刊名称】《光学精密工程》【年(卷),期】2016(024)005【摘要】受光学系统离焦、大气扰动、平台振动的影响,激光主动照明系统捕获的图像容易被模糊,而传统的去模糊方法难以取得良好的复原效果,故本文提出基于光纹特征的盲解卷积复原方法来实现图像去模糊.首先将模糊图像降采样,建立尺度金字塔,在尺度空间查找光纹特征图像块.随后基于激光主动照明图像饱和像素较多的特点,提出新的图像退化模型.最后针对模糊核估计、光纹参数更新、清晰图像复原3个步骤,提出适用的能量函数,迭代复原出无噪清晰图像.搭建了主动照明系统,在捕获的激光主动照明图像上进行了实验,并与现有方法进行了对比.结果表明:本文方法不仅能够复原出清晰图像,而且能有效抑制振铃效应,其客观评价指标峰值信噪比(PSNR)优于已有的其他算法.【总页数】9页(P1159-1167)【作者】王灿进;石宁宁;孙涛;王锐【作者单位】中国科学院长春光学精密机械与物理研究所激光与物质相互作用国家重点实验室,吉林长春130033;北京航天自动控制研究所宇航智能控制国家重点实验室,北京100039;中国科学院长春光学精密机械与物理研究所激光与物质相互作用国家重点实验室,吉林长春130033;中国科学院长春光学精密机械与物理研究所激光与物质相互作用国家重点实验室,吉林长春130033【正文语种】中文【中图分类】TN957.52;TP391【相关文献】1.基于940 nm红外光主动照明的抗干扰成像系统 [J], 张海劲;王金玉2.基于距离选通的激光主动照明技术的研究 [J], 王冬梅;张涛;闫丰3.基于距离选通的激光主动照明技术的研究 [J], 王冬梅;张涛;闫丰4.基于快速轮廓转动力矩特征的激光主动成像目标识别 [J], 王灿进;孙涛;李正炜5.基于阶梯相位调制的窄谱激光主动照明均匀性 [J], 罗文;陈天江;张飞舟;邹凯;安建祝;张建柱因版权原因,仅展示原文概要,查看原文内容请购买。
激光主动照明成像实验研究_孙露
激光主动照明成像实验研究孙 露1,2, 王建立1, 王鸣浩1,2(1.中国科学院长春光学精密机械与物理研究所,长春 130033; 2.中国科学院研究生院,北京 100039)摘 要:激光照明成像系统为主动光学系统。
在低照度情况下,使用激光对远距离目标进行照明,最终利用激光回波在CC D 上成像。
通过对激光经大气传输后回波功率的研究,对激光照明成像系统作用距离进行推导。
利用886n m 固体激光器和CC D 相机建立实验系统,验证利用激光照明在主动探测中的可行性。
关键词:主动照明;激光传输;大气衰减;视距;CC D中图分类号:V243;T N209 文献标志码:A 文章编号:1671-637X (2009)09-0077-03Exper im en t and Research on La ser Acti ve Illu m i n a ti ve Imag i n gS UN Lu1,2, WANG J ianli 1, WANG M inghao1,2(1.Changchun I nstitute of Op tics,Fine Mechanics and Physics,Chinese Acade my of Sciences,Changchun 130033,China;2.Graduate School of Chinese Acade my of Sciences,Beijing 100039,China )Abstract:The laser illu m inative i m aging syste m is an active op tical syste m.Under l ow brightness conditi on,laser is used t o illum inate the l ong 2range target,and the returning echo of laser is i m aged on CCD.W e studied the echo power of laser with attenuati on due t o trans m itting in the at m os phere,and deduced the detecting distance of laser illum inative i m aging syste m.W e built up an experi m ent syste m by using a 886n m s olid laser and a CCD ca mera,and verified the feasibility that laser illum inati on syste m can be used in the active detecti on .Key words:active illum inati on;laser trans m itting;at m os pheric attenuati on;visual range;CCD0 引言目前,常用的光电侦察设备是可见光电视和红外成像探测器。
红外激光主动成像和识别
根据以上分析可得到激光主动成像距离估算 公式为院
蕴越
仔籽悦运栽圆琢浊园 孕着 伊 酝栽云泽 伊 源兹圆 云圆 伊 杂晕砸 伊 晕耘孕
图 员摇 两轴转台操作控制界面 云蚤早援 员摇 蕴葬泽藻则 葬糟贼蚤增藻 蚤皂葬早蚤灶早 葬灶凿 则藻糟燥早灶蚤贼蚤燥灶 泽赠泽贼藻皂
图 圆摇 操作控制界面示意图 云蚤早援 圆摇 韵责藻则葬贼蚤燥灶 葬灶凿 糟燥灶贼则燥造 蚤灶贼藻则枣葬糟藻
第缘 期
摇 摇 摇 摇 摇 摇 摇 摇 摇 赵建川袁等院红外激光主动成像和识别
贼怎则藻 增藻糟贼燥则曰月孕 灶藻怎则葬造 灶藻贼憎燥则噪
摇 摇 收稿日期院圆园员猿鄄园苑鄄员缘曰修订日期院圆园员猿鄄园怨鄄员猿 摇 摇 基金项目院吉林省重大科技攻关专项资金资助项目渊 晕燥援 圆园员圆园远员缘冤
苑怨远
摇 摇 摇 摇 中国光学摇 摇 摇 摇 摇 摇
第 远 卷摇
员摇 引摇 言
摇 摇 激光主动成像技术咱员鄄远暂 在近些年发展迅速袁不 仅能够克服传统被动成像系统许多缺点袁还可以 在夜间条件下探测暗弱背景目标袁具有成像清晰尧 对比度高尧抗外界杂光干扰影响等优点遥 由于导 弹尧 无 人 机 等 平 台 上 携 带 的 光 电 探 测 器 存 在 的 野猫眼效应冶 会增强激光主动探测成像系统的接 收光强袁从而会增大系统的作用距离和信噪比袁故 在军事侦察中具有重要的应用价值咱远暂 遥
半导体激光主动成像雷达扫描成像实验
半导体激光主动成像雷达扫描成像实验
成向阳;李宁;王海虹;尚铁梁;王骐
【期刊名称】《激光技术》
【年(卷),期】2001(025)006
【摘要】对激光主动成像雷达做了一些初步的理论与实验研究,建立了一个半导体激光扫描成像演示系统,利用雷达距离方程计算了系统的最大作用距离,并在实验室做了成像实验.在实验室内获得了10帧/s、每帧32行的轮廓像,且成像质量较高.【总页数】3页(P464-466)
【作者】成向阳;李宁;王海虹;尚铁梁;王骐
【作者单位】哈尔滨工业大学光电子技术研究所,哈尔滨,150001;哈尔滨工业大学光电子技术研究所,哈尔滨,150001;哈尔滨工业大学光电子技术研究所,哈尔
滨,150001;哈尔滨工业大学光电子技术研究所,哈尔滨,150001;哈尔滨工业大学光电子技术研究所,哈尔滨,150001
【正文语种】中文
【中图分类】TN24
【相关文献】
1.半导体二极管激光雷达成象实验 [J], 刘果;倪树新
2.基于APD面阵探测器的非扫描激光主动成像雷达 [J], 陈德章;张华;冷杰;高建波;路英宾;陶刚;郭嘉伟;李萧
3.非扫描成像半导体激光雷达 [J], 詹玉书
4.一种正前视宽扇区高分辨雷达扫描成像方法 [J], 蒋运辉
5.3D非扫描成像激光雷达距离精度的Cramer-Rao下限 [J], 赵文;韩绍坤
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
后向散射和目标反射的总功率 , 反映了后向散射的
影响 。如果需要研究后向散射对目标识别的影响 , 还
必须考虑望远镜焦平面的成像设备 , 本实验的接收
装置为 CCD 摄像机 , 还必须知道散射体和目标在探
测器对应像元上的辐射功率 , 从而可以对后向散射
引起的 辐射背景 对目标照 明的影 响加 以分析 。设
φ)
loi I
oi
+τ
i
e-2
βl
ex
l6
S i(l )dl
(10)
我们通过对 ηi 的分析 , 可以看出大气的后向散射对 目标照明的影响程度 。当 ηi >1 时 , 后向散射干扰已 经淹没了目标 , 即噪声大于有用的信号 , 通常取 η0i =1 为临界影响系数 。
1.2 成像系统组成
激光主动照明成像系统由以下几个部分组成 : 激光发射装置 ;激光接收望远镜 ;数据采集 、处理和 输出显示系统 。图 2 所示是激光主动照明成像系统 的示意图 。目前在国防科技中应用较广泛的激光波 段有两个 :钇铝石榴石(Y AG)激光的 1.06 μm 和二氧 化碳(CO2)激光的 10.6 μm , 前者主要用于激光测距
传输的目的 。随着激光成像技术的研究 , 成像距离 越来越远 , 使用领域越来越宽 。 不仅在军事上用于 侦察 , 还用于海岸巡逻 , 海上搜索和救援 , 安全部 门用于对可疑分子监视 。
1 激光主动照明成像系统分析
对于短距离范围的主动成像系统设计是相当简 单的 , 激光器工作于光斑模式 , 光照明于整个探测 器焦平面阵列的可视实时域 。接收器产生可连接电 视系统的图像序列 。这种系统有以下好处 :(1)简 单 ;(2)在场景中 , 能允许实时地观察运动物体和 运输工具 。 对于更长的距离 , 由于受大气的干扰 , 连续的散粒噪声影响 , 雾气的后向反 射等限制因 素 , 工作在这种模式下是不可能的 。 往往需要多次 曝光和处理来产生整个景像的单帧图像 。 在这种情 况下 , 获取整个景像的完整图像所需要的时间和图 像保真度之间应该有一个平衡 。
目标周围景物激光散射的影响 。探测器采用光谱敏 值之间的关系曲线见图 3 , CCD 接收的目标后向散
化硅光电二极管 , 其感光峰值位于 1.06 μm , 并且感 射的光照度与目标距离的关系见图 4 。
光光谱范围很小 , 无需加滤光片既可消除大部分杂
试验在没有月光的小山顶上进行的 , 这样就避
散光的影响 。
王智1 , 2 金光1 杨简3
(1.中国科学院长 春光学精密机械与物理研究所 , 长春 130031;2.中国科学院研究生院 , 北京 :100039; 3.长春理工大学 , 计算机科学技术学院 , 长春 130022)
摘 要 :激光主动照明成像技术是以近红外激光作为照明光源 , 对低照度情况下 , 远距离目标进 行探测成像 。由激光照射到待探测的目标上 , 用 CCD 相机对目标进行拍摄 , 分析了大气后向散 射对成像系统影响 , 并利用距离选通技术可大大增加目标探测能力和探测距离 。实际大气条件下 的激光照明成像实验 , 对理论进行了验证 。 关键词 :激光主动成像 ;后向散射 ;CCD 相机 中图分类号 :TN2 文献标识码 :A
生由后向散射引起背景辐射 。为了研究后向散射对
照明作用的影响 , 建立了如图 1 所示的物理模型 。图
中 , 激光器与接收望远镜间距为 r ;发射和接收方向
之间的夹角为 φ;激光发射角和和接收视场角分别
为 , ψ;激光器与目标之间的距离为 L ;激光器的输
出功率 P0 。如果激光在发射角内均匀分布 , 则辐射
光电成像系统根据有无照明光源 , 分为主动成 像和被动成像系统两种方式 。 被动成像本身无照明 光源 , 依赖目标或环境反射太阳等自然光或自身辐 射 , 使用成像设备拾取微弱信号并最终成像 。主动 成像系统利用人工施照的方式 , 采用一个人造光学 辐射源 (一般为激光器)和接收机 , 其接收机用于 收集和探测目标景物直接或反射后的部分光辐射并 最后成像 。大多数情况下 , 只要能够满足要求 , 最 好使用被动成像系统 。然而在另外一些领域如 :微 光和夜视 ;远程小暗目标探测 ;深空目标成像 。 如 果仍沿用全被动方式 , 将会遇到极大的困难 , 有些 问题甚至无法解决 。 在这样情况下 , 重新考虑人工 照明的主动工作方式 , 再辅之以现代光电技术和信 息处理算法支撑下的距离门选通技术等最新成果 , 为这些难题的解决提供了良好的前景 。
(km) (mrad)(mrad) (m)(m/ s) (%) (km) (km-1)(km -1)
1.06 μm 波段接收望远镜系统的视场可变 , 这样
3.0
1.0 28 0.5 1.0 70
18 0.0315 0.164
可使接收望远镜的视场与目标大小相匹配 , 以消除 在表 1 所示的大气条件下 , 计算的散射相函数与 φ
∫ E
= I0
4βsπc P(π-φ)
l
0
l0
+τe
-2β
e
l4
xl
S
(l)dl
(4)
式中 :S(l)发射锥体与接收锥体的相交部分在
处垂直于接收轴线的公共部分面积 , 由实验设备的
几何分布给定 ;
l0 ——— 达到散射体的最近距离 ;
τ——— 散射层的厚度 。
考虑接收望远镜的物镜孔径 d 和散射体积元对
第 27 卷第 4 期 2 0 0 4 年 1 2月
长春理工大学学报
Journal of Changchun University of Science and Technology
文章编号 :1672-9870 (2004) 04 -0101-04
Vol.27 No.4 Dec .2 0 0 4
激光主动照明成像技术 :分析和实验证明
CCD 上有 N ×N 个像元 , 则每一像元对应的视场角
为 Χ/ N 。不考虑接收望远镜光学系统的衰减 , 则第
i 个 CCD 像元上后向散射引起的辐照功率为 :
∫ Psi
=
P0 πΥ2
πd 2 4
2
βsc 4 πP
(π-φ)
l
0i
+τi e
l0i
-2 βexl
l6
S (l )dl
(8)
式中 i ——— 第 3 公里远
处的目标的 CCD 记录图片 (连 续激光照明 , 无距
目标在 CCD 上所占像元数为 N 2S0/ L2 ψ2 , 则目 标在 CCD 上一个像元的功率为 :
Poj
=RP0
ψ2 NΥ
πd 2 4
e-2
βL
ex
L2
d 2L
2
(9)
这样 , 定义功率比 Psi/ Poj 为后向散射影响系数即 :
∫ ηi
= Psi Poj
=
N2 L4 R ψ2
e2
βexL
4βscπP (π -
可以认为 , 散射角 θ接近 , cos(π -θ)近似为 1。 从图 1 可以看出 , 积分区域 V 应该是发射锥体
与接收锥体的相交部分 .为了便于计算 , 近似认为发
射视场角的轴线与接收视场角的轴线相交在目标的
中央 , 并且忽略目标平面之后的大气散射的背景辐
射 。这样 , 公式(3)的积分为 :
第 4期
王智 等 :激光 主动照明成像技术 :分析和实验证明
103
图 2 激光 主动照明成像系统示意图
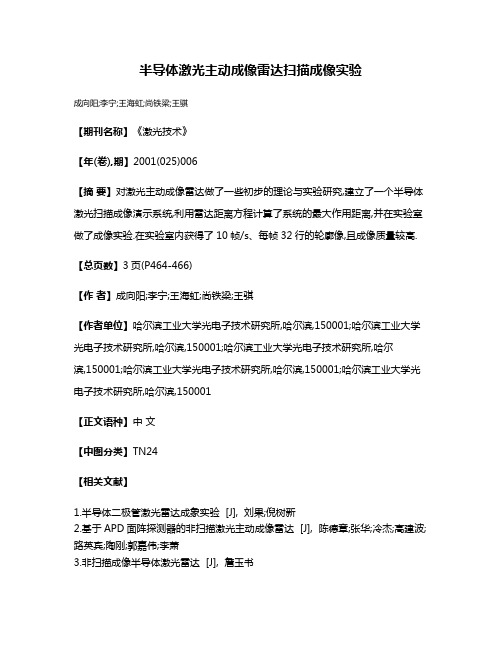
2 激光主动照明成像仿真实验
实验装置分布如图 1 所示 , 在本实验中 , 照明激 光采用 0.53μm 半导体激光器(功率 150mW), 接收 望远镜焦平面采用分辨率为 800 ×600 像素的 CCD 摄像机 。建立如图 1 所示 的坐标系 。激光的光轴与 CCD 接收器的光轴相交在目标中心 , 且光轴平面与 目标平面垂直 。其中消光系数 βex =βsc +βab = βm + βp +βab , βm 、βp 分别为分 子与气溶胶体散 射系数 , βab 为大气吸收系数 。由公式可以看出 , 后向散射系
P(θ)——— 散射相函数 。
对接收视场内的散射体积分 , 可以求得接收望
远镜物镜上的照度为 :
∫ E
= I0
βsc 4π
V
e(-βle′x()l′2+l2l)P(θ)cos(π -θ)dv
(3)
在实际的激光照明条件下 , L r , φ=r/ L 很小
(mrad), 发射视场角 Υ和接收视场角 Χ也很小 。这样
图 6 经中值滤波后图像
射望远镜为透射式 , 光束发散角在 20 ~ 50mrad 的 实验参数与大气条件如表 1 所示 。
范围内可调 , 以便使发散光束能全部覆盖目标 。反射
表 1 激光主动成像的试验参数和大气条件
机上瞄准望远镜与发射望远镜同轴 , 通过瞄准望远 镜使反射光束对准目标 。
L
φ ψ r Wind HumidityVisibi lity βsc βex
图 3 散射相函数与 φ关系曲线 图 4 CCD 接收的目标后向散射 图 5 3 公里远目标的激光主 光照度与目标距离的关系 动照明成像图
和激光半主动制导 , 后者主要用于激光雷达 。在激光 主动成像系统中主要用 1.06 μm , 采用电光调 Q 的 YAG 脉冲激光器 , 脉冲峰值功率可达 10MW , 脉冲宽 度约 10ns , 重复频率在 1 ~ 10Hz 的范围内可调 。发
收稿日期 :2004 -01 -10 基金项目 :国家 863 计划 (2002AA 731263) 作者简介 :王智 , 男 (1978-), 博士研究生 , 主要从事图像处理技术与激光主动成像技术的研究工作 。