MATLAB实验报告 (2)
实验二MATLAB绘制图形
grid on %在所画出的图形坐标中加入栅格
绘制图形如下
50
10
1
0.8
40
10
0.6
0.4
30
10
0.2
0
1020
-0.2
-0.4
1010
-0.6
-0.8
0
10
-1
-2
0
2
-2
0
2
10
10
10
10
10
10
如果在图中不加栅格
程序如下:
clear x=logspace(-1,2);%在10^(-1)到10^2之间产生50个 对数等分的行向量 subplot(121); loglog(x,10*exp(x),'-p') subplot(122); semilogx(x,cos(10.^x))
(2)plot(x,y): 基本格式,x和y可为向量或矩阵. 1. 如果x,y是同维向量,以x元素为横坐标,以y元素 为纵坐标绘图. 2. 如果x是向量,y是有一维与x元素数量相等的矩阵, 则以x为共同横坐标, y元素为纵坐标绘图,曲线数目 为y的另一维数. 3. 如果x,y是同维矩阵,则按列以x,y对应列元素为 横、纵坐标绘图,曲线数目等于矩阵列数.
y=2*exp(-0.5*x).*cos(4*pi*x);
2
plot(x,y)
1.5
1
0.5
0
-0.5
-1
-1.5
-2
0
1
2
3
4
5
6
7
例4 绘制曲线
t=(0:0.1:2*pi);
x=t.*sin(3*t);
y=t.*sin(t).*sin(t);
matlab实验二
北京工业大学Matlab实验报告**: ***学号: ************: **实验二、Matlab 的基本计算(一)实验目的1.掌握建立矩阵的方法。
2.掌握Matlab 各种表达式的书写规则以及常用函数的使用。
3.能用Matlab 进行基本的数组、矩阵运算。
4.掌握矩阵分析的方法以及能用矩阵运算或求逆法解线性方程组。
5.掌握Matlab 中的关系运算与逻辑运算。
(二)实验环境1.计算机2.MATLAB7.0集成环境(三)实验内容及要求1、熟练操作MATLAB7.0运行环境;2、自主编写程序,必要时参考相关资料;3、实验前应写出程序大致框架或完整的程序代码;4、完成实验报告。
(四)实验程序设计1.利用diag 等函数产生下列矩阵。
⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=032570800a ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=804050702b2.利用reshape 函数将1题中的a 和b 变换成行向量。
3.产生一个均匀分布在(-5,5)之间的随机矩阵(10×2),要求精确到小数点后一位。
4.已知:⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=76538773443412A ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=731203321B求下列表达式的值:(1) B A K *611+=和I B A K +-=12(其中I 为单位矩阵)(2) B A K *21=和B A K *.22=(3) 331^A K =和3.32^A K =(4) B A K /41=和A B K \42=(5) ],[51B A K =和]2:);],3,1([[52^B A K = 5.下面是一个线性方程组:⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡52.067.095.03216/15/14/15/14/13/14/13/12/1x x x(1)求方程的解(矩阵除法和求逆法)(2)将方程右边向量元素3b 改为0.53,再求解,并比较3b 的变化和解的相对变化。
matlab计算机实验报告

matlab计算机实验报告Matlab计算机实验报告引言Matlab是一种强大的计算机软件,广泛应用于科学计算、数据分析和工程设计等领域。
本实验报告旨在介绍我对Matlab的实验研究和应用。
通过实验,我深入了解了Matlab的功能和特点,并通过实际案例展示了其在科学计算和数据处理中的应用。
实验一:基本操作和语法在本实验中,我首先学习了Matlab的基本操作和语法。
通过编写简单的程序,我熟悉了Matlab的变量定义、赋值、运算符和条件语句等基本语法。
我还学习了Matlab的矩阵操作和向量化计算的优势。
通过实例演示,我发现Matlab在处理大规模数据时具有高效性和便捷性。
实验二:数据可视化数据可视化是Matlab的重要应用之一。
在本实验中,我学习了如何使用Matlab绘制各种图表,如折线图、散点图、柱状图和饼图等。
我了解了Matlab 的绘图函数和参数设置,并通过实例展示了如何将数据转化为直观的图形展示。
数据可视化不仅可以帮助我们更好地理解数据,还可以用于数据分析和决策支持。
实验三:数值计算和优化Matlab在数值计算和优化方面具有强大的功能。
在本实验中,我学习了Matlab 的数值计算函数和工具箱,如数值积分、微分方程求解和线性代数运算等。
通过实例研究,我发现Matlab在求解复杂数学问题和优化算法方面具有出色的性能。
这对于科学研究和工程设计中的数值分析和优化问题非常有用。
实验四:图像处理和模式识别Matlab在图像处理和模式识别领域也有广泛的应用。
在本实验中,我学习了Matlab的图像处理工具箱和模式识别算法。
通过实例演示,我了解了如何使用Matlab进行图像滤波、边缘检测和特征提取等操作。
我还学习了一些常见的模式识别算法,如支持向量机和神经网络等。
这些技术在计算机视觉和模式识别中具有重要的应用价值。
实验五:信号处理和系统建模Matlab在信号处理和系统建模方面也有广泛的应用。
在本实验中,我学习了Matlab的信号处理工具箱和系统建模工具。
南华大学《MATLAB及应用》实验报告2
核科学技术学院实验报告实验项目名称MATLAB符号计算所属课程名称MATLAB及应用实验类型上机实验实验日期12月日指导教师谢芹班级学号姓名成绩一、实验名称MATLAB符号计算二、实验目的(1)掌握定义符号对象的方法(2)掌握符号表达式的运算法则以及符号矩阵运算(3)掌握求符号函数极限及导数的方法(4)掌握求符号函数定积分和不定积分的方法三、实验原理1. 函数极限及导数的方法(1)函数极限:limit(F,x,a) 求符号函数f(x)的极限值。
即计算当变量x趋近于常数a时,f(x)函数的极限值。
(2)limit(f):求符号函数f(x)的极限值。
符号函数f(x)的变量为函数findsym(f)确定的默认变量;没有指定变量的目标值时,系统默认变量趋近于0,即a=0的情况。
(3)limit(f,x,a,'right'):求符号函数f的极限值。
'right'表示变量x从右边趋近于a。
(4)limit(f,x,a,‘left’):求符号函数f的极限值。
‘left’表示变量x从左边趋近于a。
2. 微分:diff(s):没有指定变量和导数阶数,则系统按findsym函数指示的默认变量对符号表达式s求一阶导数。
diff(s,'v'):以v为自变量,对符号表达式s求一阶导数。
diff(s,n):按findsym函数指示的默认变量对符号表达式s求n阶导数,n为正整数。
diff(s,'v',n):以v为自变量,对符号表达式s求n阶导数。
3. 函数定积分和不定积分的方法:int(s):没有指定积分变量和积分阶数时,系统按findsym函数指示的默认变量对被积函数或符号表达式s求不定积分。
int(s,v):以v为自变量,对被积函数或符号表达式s求不定积分。
int(s,v,a,b):求定积分运算。
a,b分别表示定积分的下限和上限。
梯形法:trapz(x,y):x为分割点构成的向量,y为被积函数在分割点上的函数值构成的向量;抛物线法:quad(f,a,b,tol),f 是被积函数,[a,b]是积分区间,tol 是精度。
MATLAB实验报告

实验二MATLAB语言基础一、实验目的基本掌握MA TLAB向量、矩阵、数组的生成及其基本运算(区分数组运算和矩阵运算)、常用的数学函数。
了解字符串的操作。
二、实验内容1.向量的生成与运算;2.矩阵的创建、引用和运算;3.多维数组的创建及运算;4.字符串的操作。
三、实验步骤1.向量的生成与运算①向量的生成向量的生成有三种方法:直接输入法:生成行向量、列向量;冒号表达式法:变量=初值:间隔(可正可负):终值函数法:使用linspace线性等分函数,logspace对数等分函数。
格式为:linspace(初值,终值,个数)Logspace(初值,终值,个数), 初值及终值均为10的次幂。
②向量的运算A=[1 2 3 4 5],b=3:7,计算两行向量的转置,两行向量人加、减,两列向量的加、减;向量的点积与叉积。
a=[1 2 3 4 5];b=3:7;a =1 2 3 4 5b =3 4 5 6 7at=a',bt=b'at =12345bt =34567e1=a+b,e2=a-be1 =4 6 8 10 12 e2 =-2 -2 -2 -2 -2 f1=at+bt,f2=at-btf1 =4561012f2 =-2-2-2-2-2g1=dot(a,b),g2=a*bt>> g1=dot(a,b),g2=a*btg1 =85g2 =85g4=a.*b>> g4=a.*bg4 =3 8 15 24 35A=1:3;B=4:6;g3=cross(A,B)>> g3=cross(a,b)g3 =-3 6 -3注意:g1和g2的结果是否相同,为什么?g4的结果与g1和g2结果是否一样,为什么?g1和g2的结果相同,因为两者是同一种运算;g4与g1和g2不相同,因为两者一个是点乘一个是叉乘,运算不一样。
2.矩阵的创建、引用和运算矩阵是由n×m元素构成的矩阵结构。
实验二MATLAB程序设计含实验报告
实验二 MATLAB 程序设计一、 实验目的1.掌握利用if 语句实现选择结构的方法。
2.掌握利用switch 语句实现多分支选择结构的方法。
3.掌握利用for 语句实现循环结构的方法。
4.掌握利用while 语句实现循环结构的方法。
5.掌握MATLAB 函数的编写及调试方法。
二、 实验的设备及条件计算机一台(带有MATLAB7.0以上的软件环境)。
M 文件的编写:启动MATLAB 后,点击File|New|M-File ,启动MATLAB 的程序编辑及调试器(Editor/Debugger ),编辑以下程序,点击File|Save 保存程序,注意文件名最好用英文字符。
点击Debug|Run 运行程序,在命令窗口查看运行结果,程序如有错误则改正三、 实验内容1.编写求解方程02=++c bx ax 的根的函数(这个方程不一定为一元二次方程,因c b a 、、的不同取值而定),这里应根据c b a 、、的不同取值分别处理,有输入参数提示,当0~,0,0===c b a 时应提示“为恒不等式!”。
并输入几组典型值加以检验。
(提示:提示输入使用input 函数)2.输入一个百分制成绩,要求输出成绩等级A+、A 、B 、C 、D 、E 。
其中100分为A+,90分~99分为A ,80分~89分为B ,70分~79分为C ,60分~69分为D ,60分以下为E 。
要求:(1)用switch 语句实现。
(2)输入百分制成绩后要判断该成绩的合理性,对不合理的成绩应输出出错信息。
(提示:注意单元矩阵的用法)3.数论中一个有趣的题目:任意一个正整数,若为偶数,则用2除之,若为奇数,则与3相乘再加上1。
重复此过程,最终得到的结果为1。
如:2?13?10?5?16?8?4?2?16?3?10?5?16?8?4?2?1运行下面的程序,按程序提示输入n=1,2,3,5,7等数来验证这一结论。
请为关键的Matlab 语句填写上相关注释,说明其含义或功能。
MATLAB实验报告第二章
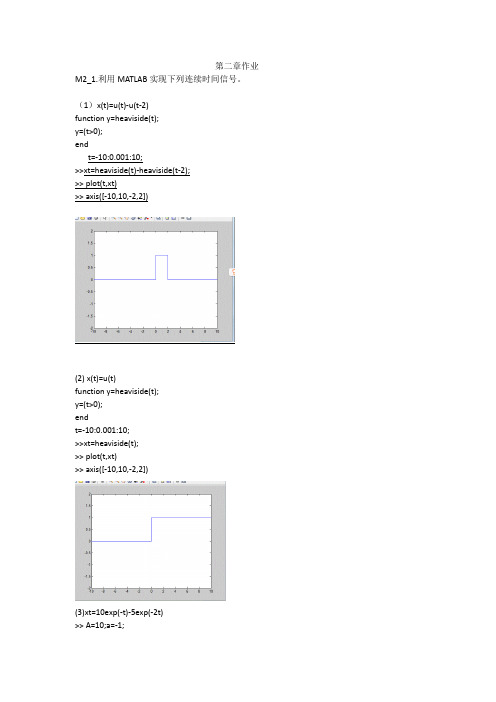
第二章作业M2_1.利用MATLAB实现下列连续时间信号。
(1)x(t)=u(t)-u(t-2)function y=heaviside(t);y=(t>0);endt=-10:0.001:10;>>xt=heaviside(t)-heaviside(t-2);>>plot(t,xt)>>axis([-10,10,-2,2])(2) x(t)=u(t)function y=heaviside(t);y=(t>0);endt=-10:0.001:10;>>xt=heaviside(t);>>plot(t,xt)>>axis([-10,10,-2,2])(3)xt=10exp(-t)-5exp(-2t)>> A=10;a=-1;>> t=0:0.001:10;>> x1t=A*exp(a*t);>> A=5;a=-2;>> t=0:0.001:10;>> x2t=A*exp(a*t);>>xt=x1t-x2t;>>plot(t,xt)(4)xt=tu(t)>> t=-10:0.001:10;>>xt=t.*heaviside(t);>>plot(t,xt)(5)xt=2|sin(10pit+pi/3)| >> A=2;w0=10*pi;phi=pi/3; >> t=0:0.001:1;>>xt=A*abs(sin(w0*t+phi)); >>plot(t,xt)>>axis([0,1,-4,4])Xt=cost+sin(2pit)>> A=1;w0=1;phi=0; >> t=0:0.002:10;>> x1t=A*cos(w0*t+phi); >> A=2;w0=2*pi;phi=0; >> t=0:0.002:10;>> x2t=A*sin(w0*t+phi); >>xt=x1t+x2t;>>plot(t,xt)(7)xt=4exp(-0.5t)cos(2pit) >> A=5;a=-0.5;>> t=0:0.001:10;>> x1t=A*exp(a*t);>> A=1;w0=2*pi;phi=0; >> t=0:0.001:10;>> x2t=A*cos(w0*t+phi); >>xt=x1t.*x2t;>>plot(t,xt)(8)Sa(pit)cos(30t)A=1;w0=30;phi=0;>> t=0:0.001:3;>> x1t=A*cos(w0*t+phi);>> t=0:0.001:3;>> x2t=sinc(t);>>xt=x1t.*x2t;>>plot(t,xt)M2-3,写出书中图示波形函数,并画出xt,x0.5t,x(2-0.5t)的图像function yt=x2_3(t)yt=t.*(t>=0&t<2)+2*(t>=2&t<3)+(-1)*(t>=3&t<=5); end>> t=0:0.001:5;>>xt=x2_3(t);>>title('x(t)');>>plot(t,xt)>>axis([0,6,-2,3])>> t=0:0.001:10;xt=x2_3(0.5*t); >>plot(t,xt)>>title('x(0.5t)')>>axis([0,10,-2,3])x(0.5t)>> t=-10:0.001:10;>>xt=x2_3(2-0.5*t);>>plot(t,xt)>>title('x(2-0.5t)')>>axis([-10,10,-2,3])M2-4画出图示的奇分量和偶分量。
matlab实验报告2

第二次上机作业准备&要求:1、 运行课件第三章(课本第四章)讲过的例子,掌握Matlab 的流程控制语句、函数及脚本文件的编程、调试方法。
2、 本次作业(4~12题)要求全部写M 文件;3、 题目要求未明确要求写脚本文件还是函数文件的,学生自己决定是写脚本文件还是函数文件。
只要能够实现要求。
4、 列出第二章课堂上出现过的所有函数,知道它们的作用并试着调用这些函数。
作业:1. 继续完成第一次上机实验未完成的作业。
2. 分析脚本M 文件及函数M 文件的区别。
(1)脚本文件没有输入参数,也不返回输出参数,而函数文件可以带输入参数,也可以返回输出参数。
(2)脚本文件对MATLAB 工作空间中的变量进行操作,文件中所有命令的执行结果也完全返回到工作空间中,而函数文件中定义的变量为局部变量,当函数文件执行完毕时。
这些变量被清除。
(3)脚本文件可以直接运行。
在MATLAB 命令行窗口输入脚本文件的名字,就会顺序执行脚本文件中的命令。
而函数文件不能直接运行,要以函数调用的方式来调用。
3. 已知⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=7613870451A ,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=023352138B ,求下列表达式的值,并注意第(2)(3)小题表达式的结果有何特点:(1)B A 6+ 、I B A +-2(其中I 为单位阵);>> A+6*Bans =47 23 -1012 37 26-15 73 7>> A^2-B+Ians =-18 -217 1722 533 10921 867 526(2)A*B、A.*B、B*A、B.*A;>> A*Bans =14 14 16-10 51 21125 328 180>> A.*Bans =-8 15 40 35 24-9 122 0>> B*Aans =-11 0 -157 228 533 -1 28>> B.*Aans =-8 15 40 35 24-9 122 0(3)A/B、B\A、A./B、B.\A;A/Bans =1.2234 -0.92552.9787-0.9468 2.3511 -0.95744.6170 3.8723 13.8936>> B\Aans =-0.5106 -8.6170 -1.12770.7340 17.5745 1.8085-0.8830 -21.2128 0.4043>> A./Bans =-0.1250 1.6667 4.00000 1.4000 2.6667-1.0000 30.5000 Inf>> B.\Aans =-0.1250 1.6667 4.00000 1.4000 2.6667-1.0000 30.5000 Inf(4)[A, B]、[A([1 3],:);B^2]。
MATLAB数学实验报告2
MATLAB数学实验报告姓名:李帆班级:机械(硕)21学号:2120104008第一次数学实验报告——线性规划问题一,实验问题1,某饲养场饲养动物出售,设每头动物每天至少需要700g蛋白质,30g矿物质,100mg 维生素。
现有五种饲料可供选择,各种饲料的每千克营养成分含量和单价如下表。
是确定既能满足动物生长的营养需要,游客是费用最省的选用饲料方案。
2,某工厂生产甲、乙、丙三种产品,单位产品所需工时分别为2、3、1个;单位产品所需原料分别为3、1、5公斤;单位产品利润分别为2、3、5元。
工厂每天可利用的工时为12个,可供应的原料为15公斤。
为使总利润为最大,试确定日生产计划和最大利润。
二,问题分析1,1)该题属于采用线性规划的方式求出最优解的数学问题。
该题有以下特点,1.目标函数有线性,是求目标函数的最小值;2.约束条件为线性方程组;3.未知变量都有非负限制。
1,2)求解该类问题的方法有图解法,理论解法和软件解法。
图解法常用于解变量较少的线性规划问题。
理论解法要构建完整的理论体系。
目前用于解线性规划的理论解法有:单纯形法,椭球算法等。
在此,我们采用单纯形法的MATLAB软件解法来求解该问题。
1,3)此题中,要求既要满足动物生长的营养需要,又要使费用最省,则使每种饲料的选用量为变量,以总费用的最小值为所求量,同时每种饲料的使用量要符合营养成分的要求。
1,4)在此,首先确定建立线性规划模型。
设饲料i选用量为xi公斤,i=1,2,3,4,5.则有模型:Minz=0.2x1+0.7x2+0.4x3+0.3x4+0.8x5s.t.{3x1+2x2+6x4+18x5>=700;x1+0.5x2+0.2x3+2x4+0.5x5>=300.5x1+x2+0.2x3+2x4+0.8x5>=100Xj>=0,j=1,2,3,4,5解之得:x1=x2=x3=0X4=39.74359X5=25.14603Zmin=32.435902,1)该问题与第一题分析步骤相似,故只在此写出其线性规划模型Z=2x+3y+5z2x+3y+z<=123x+y+5z<=15三,程序设计流程图第一题:c=[0.2,0.7,0.4,0.3,0.8]A=[3,2,1,6,18;1,0.5,0.2,2,0.5;0.5,1,0.2,2,0.8;1,0,0,0,0;0,1, 0,0,0;0,0,1,0,0;0,0,0,1,0;0,0,0,0,1]b=[700,30,100,0,0,0,0,0][x,fval]=linprog(c,-A,-b)c=0.20000.70000.40000.30000.8000A=3.0000 2.0000 1.0000 6.000018.00001.00000.50000.20002.00000.50000.5000 1.00000.2000 2.00000.80001.000000000 1.000000000 1.000000000 1.000000000 1.0000b=7003010000000Optimization terminated.x=0.0000-0.00000.000039.743625.6410fval=32.4359第二题c=[-2-3-5]A=[231;315]b=[12;15]lb=[000][x,Z,exitflag,output]=linprog(c,A,b,[],[],lb,[])将上述程序输入matlab。
matlab实验报告
实验一:MATLAB基本操作一、实验目的1、学习掌握MA TLAB语言的基本操作方法2、掌握命令窗口的使用3、熟悉MA TLAB的数据表示、基本运算和程序控制语句4、熟悉MA TLAB程序设计的基本方法二、实验内容和要求2.b.帮助命令的使用,查找SQRT函数的使用方法按Start-help-search,输入sqrtc.矩阵运算(1)已知A=[1 2;3 4];B=[5 5;7 8];求A^2*B输入A=[1 2;3 4];B=[5 5;7 8];A^2*B结果为:ans =105 115229 251(2)矩阵除法已知A=[1 2 3 ;4 5 6;7 8 9];B=[1 0 0;0 2 0;0 0 3];求A/B,A\BA/B=1.0000 1.0000 1.00004.0000 2.5000 2.00007.0000 4.0000 3.0000A\B=1.0e+016 *0.3152 -1.2609 0.9457-0.6304 2.5218 -1.89130.3152 -1.2609 0.9457(3)矩阵的转置及共轭转置已知A=[15+i,2-i,1;6*i,4,9-i];求A.',A'A=15.0000 + 1.0000i 2.0000 - 1.0000i 1.00000 + 6.0000i 4.0000 9.0000 - 1.0000iA.'=15.0000 + 1.0000i 0 + 6.0000i2.0000 - 1.0000i 4.00001.0000 9.0000 - 1.0000iA'=15.0000 - 1.0000i 0 - 6.0000i2.0000 + 1.0000i 4.00001.0000 9.0000 + 1.0000i(4)使用冒号选出指定元素已知A=[1 2 3;4 5 6;7 8 9];求A中第三列前两个元素;A中所有第二行的元素A =1 2 34 5 67 8 9求A中第三列前两个元素:A([1,2],3)ans =36求A中所有第二行的元素:A(2,1:1:end)ans =4 5 6(5)方括号[]用magic函数生成一个4阶魔方矩阵,删除该矩阵的第四列magic(4)ans =16 2 3 135 11 10 89 7 6 124 14 15 1a=ans;a(:,[1,2,3])ans =16 2 35 11 109 7 64 14 153..多项式(1)求多项式p(X)=x^3-2x-4的根(2)已知A=[1.2 3 5 0.9;5 1.7 5 6;3 9 0 1;1 2 3 4]求矩阵A的特征多项式;求矩阵多项式中未知数为20时的值;把矩阵A作为未知数代入到多项式中;(1)a=[1,0,-2,-4]x=roots(a)x =2.0000-1.0000 + 1.0000i-1.0000 - 1.0000i(2)求特征多项式系数:A=[1.2 3 5 0.9;5 1.7 5 6;3 9 0 1;1 2 3 4]p=poly(A)p =1.0000 -6.9000 -77.2600 -86.1300 604.5500求矩阵多项式中未知数为20时的值:c=polyval(p,20)c =7.2778e+004把矩阵A作为未知数代入到多项式中:c=polyval(p,A)c =1.0e+003 *0.3801 -0.4545 -1.9951 0.4601-1.9951 0.2093 -1.9951 -2.8880-0.4545 -4.8978 0.6046 0.43530.4353 0.0840 -0.4545 -1.16174、基本程序设计(1)编写命令文件:计算1+2+3+……+n<2000;n=0;s=0;while s<2000n=n+1;s=s+n;endn=n-1n =62(2)编写函数文件:分别用for和while循环结构编写程序,求2的0到n次幂的和。
数学实验二(matlab中二分法求解方程)

云南大学数学与统计学实验教学中心实验报告
数学实验(二)
一、实验目的:练习用数值迭代逼近法解非线性方程。
1.区间迭代法:对分法和黄金分割法
2.点的迭代法:简单迭代法
二、实验内容:用二分法(即对分法)编程求解方程。
0123=---x x x
三、实验环境:MATLAB.
四.实验方法:
程序代码:
function X=fan(a,b)
e=1e-2;
ep=1;
x0=a;
xn=b;
x=0;
k=0;
N=100;
while (ep>e)
x=(x0+xn)/2;
f1=x^3-x^2-x-1;
f2=x0^3-x0^2-x0-1;
f3=xn^3-xn^2-xn-1;
if f1*f2<0
x0=a;
xn=x;
elseif f1*f3<0
x0=x;
xn=b;
end
ep=abs(f1);
k=k+1;
if k>N
break;
end
x
ep
实验结果:
fan(a,b)
x =
1.8572
ep =
0.0993
五、实验过程
1实验步骤
2 关键代码及其解释
3 调试过程
六、实验总结
1.遇到的问题及解决过程
2.产生的错误及原因分析
3.体会和收获。
MATLAB第二章实验报告

MATLAB数据及基本操作班级:11电信一班姓名:何得中学号:20111060108实验目的:1.熟悉MATLAB的组体成体系及工作环境;2.了解MATLAB的帮助系统;3.掌握MATLAB的数据类型及变量的基本操作;4.掌握矩阵建立的基本方法及其运算;5.掌握矩阵索引与分析方法;6.熟悉字符串单元及结构数据的建立及基本操作。
实验仪器:MA TLAB软件,电脑实验数据:>> A=[1 2 3;4 5 6;7 8 9]A = 1 2 34 5 67 8 9>> A=[1 2 34 5 67 8 9]A = 1 2 34 5 67 8 9>> x=0:pi/8:2*pi;>> y=cos(x)y = Columns 1 through 101.0000 0.9239 0.7071 0.3827 0.0000 -0.3827 -0.7071 -0.9239 -1.0000 -0.9239Columns 11 through 17-0.7071 -0.3827 -0.0000 0.3827 0.7071 0.9239 1.0000>> B=ones(3,5)B = 1 1 1 1 11 1 1 1 11 1 1 1 1>> zeros(3)ans = 0 0 00 0 00 0 0>> C=rand(3,4)C = 0.9501 0.4860 0.4565 0.44470.2311 0.8913 0.0185 0.61540.6068 0.7621 0.8214 0.7919>> D=randn(2,3)D = -0.4326 0.1253 -1.1465-1.6656 0.2877 1.1909>> eye(3)ans = 1 0 00 1 00 0 1>> M=magic(4)M = 16 2 3 135 11 10 89 7 6 124 14 15 1>> T=toeplitz(1:5,1:6)T = 1 2 3 4 5 62 1 234 53 2 1 2 3 44 3 2 1 2 35 4 3 2 1 2>> H=hilb(5)H = 1.0000 0.5000 0.33330.2500 0.20000.5000 0.3333 0.2500 0.2000 0.16670.3333 0.2500 0.2000 0.1667 0.14290.2500 0.2000 0.1667 0.1429 0.12500.2000 0.1667 0.1429 0.1250 0.1111>> a=3:18a =3 4 5 6 7 8 9 10 1112 13 14 15 16 17 18>> b=1:0.2:6b =Columns 1 through 91.0000 1.2000 1.4000 1.600 1.80002.0000 2.2000 2.4000 2.6000 Columns 10 through 182.80003.0000 3.2000 3.40003.6000 3.80004.0000 4.2000 4.4000 Columns 19 through 264.6000 4.80005.0000 5.20005.4000 5.6000 5.80006.0000>> linspace(1,15,10)ans =Columns 1 through 91.00002.5556 4.1111 5.6667 7.2222 8.7778 10.3333 11.8889 13.4444Column 1015.0000>> y=[0.9 0.3 0.4 0.1 0.5 0.6 0.2 ]; >> [sorted,index]=sort(y)sorted =0.1000 0.2000 0.3000 0.4000 0.5000 0.6000 0.9000 index =4 7 2 3 5 6 1>> A=rand(4,5)A = 0.9218 0.9355 0.0579 0.13890.27220.7382 0.9169 0.3529 0.2028 0.19880.1763 0.4103 0.8132 0.1987 0.01530.4057 0.8936 0.0099 0.6038 0.7468>> [a,b]=min(A)a =0.1763 0.4103 0.0099 0.13890.0153b = 3 3 4 1 3>> min(A(:))ans = 0.0099>> V=[1 2 3 4]V = 1 2 3 4>> norm(V,2)ans =5.4772>> norm(V,1)ans = 10>> norm(V,inf)ans = 4>> V=[2 5 6 8 4 9]V = 2 5 6 8 4 9>> min(V)ans = 2>> V=[4 9 6;7 8 9;4 5 6]V = 4 9 67 8 94 5 6>> min(V)ans = 4 5 6>> max(V)ans = 7 9 9>> mean(V)ans = 5.0000 7.3333 7.0000>> median(V)ans = 4 8 6>> std(V)ans = 1.7321 2.0817 1.7321>> diff(V)ans =3 -1 3-3 -3 -3>> sort(V)ans =4 5 64 8 67 9 9>> length(V)ans = 3>> norm(V)ans =19.9125>> sum(V)ans = 15 22 21>> prod(V)ans =112 360 324>> cumsum(V)ans = 4 9 611 17 1515 22 21 >> cumprod(V)ans = 4 9 628 72 54112 360 324>> V=[1 2 8]V = 1 2 8>> U=[3; 4;7]U = 347>> dot(V,U)ans =67>> cross(V,U)ans =-18 17 -2>> A=[5 6 4;7 8 9;4 5 6]A = 5 6 47 8 94 5 6>> B=[6 2 7 ;7 5 8;4 6 8]B = 6 2 77 5 84 6 8>> C=A-BC = -1 4 -30 3 10 -1 -2>> C=A*BC = 88 64 115134 108 18583 69 116>> C1=A\BC1 =0.6667 -6.4444 -7.66670.6667 4.8889 7.3333-0.3333 1.2222 0.3333>> C2=B/AC2 = -3.0000 8.3333 -9.3333-1.6667 5.5556 -5.88890.0000 -1.3333 3.3333>> A=[1 2 3;4 5 6;7 8 9]A = 1 2 34 5 67 8 9>> D=A^2D = 30 36 4266 81 96102 126 150>> E=A^0.1E = 0.8466 + 0.2270i 0.3599 + 0.0579i -0.0967 - 0.1015i0.4015 + 0.0216i 0.4525 + 0.0133i 0.4432 - 0.0146i-0.0134 - 0.1740i 0.4848 - 0.0509i 1.0132 + 0.0820i>> A=[1+2*i 3;4 2+i]A =1.0000 + 2.0000i 3.00004.0000 2.0000 + 1.0000i>> A'ans = 1.0000 - 2.0000i 4.00003.0000 2.0000 - 1.0000i>> A=[1 2 3;4 5 6;7 8 9]A = 1 2 34 5 67 8 9>> B=[3 4 6;7 9 8;5 2 01]B = 3 4 67 9 85 2 1>> C=A.*BC = 3 8 1828 45 4835 16 9>> D=A./BD = 0.3333 0.5000 0.50000.5714 0.5556 0.75001.4000 4.0000 9.0000>> E=A.\BE = 3.0000 2.0000 2.00001.7500 1.8000 1.33330.7143 0.2500 0.1111>> A=[1+2*i 3;4 2+i]A = 1.0000 + 2.0000i 3.00004.0000 2.0000 + 1.0000i>> A.^2ans = -3.0000 + 4.0000i 9.000016.0000 3.0000 + 4.0000i>> A.'ans = 1.0000 + 2.0000i 4.00003.0000 2.0000 + 1.0000i>> x=0.1:0.1:0.8x =0.1000 0.2000 0.3000 0.4000 0.5000 0.6000 0.7000 0.8000>> y=sin(2*x).*cos(2*x)y =0.1947 0.3587 0.4660 0.4998 0.4546 0.3377 0.1675 -0.0292>> y=sin(x)y =0.0998 0.1987 0.2955 0.3894 0.4794 0.5646 0.6442 0.7174>> y=cos(x)y =0.9950 0.9801 0.9553 0.9211 0.8776 0.8253 0.7648 0.6967>> y=tan(x)y =0.1003 0.2027 0.3093 0.4228 0.5463 0.6841 0.8423 1.0296>> y=cot(x)y =9.9666 4.9332 3.2327 2.3652 1.8305 1.4617 1.1872 0.9712>> y=sec(x)y = 1.0050 1.0203 1.0468 1.0857 1.1395 1.2116 1.3075 1.4353>> y=csc(x)y = 10.0167 5.0335 3.3839 2.5679 2.0858 1.7710 1.5523 1.3940>> y=asin(x)y = 0.1002 0.2014 0.3047 0.4115 0.5236 0.6435 0.7754 0.9273>> y=acos(x)y = 1.4706 1.3694 1.2661 1.1593 1.0472 0.9273 0.7954 0.6435>> y=atan(x)y =0.0997 0.1974 0.2915 0.3805 0.4636 0.5404 0.6107 0.6747>> y=acot(x)y = 1.4711 1.3734 1.2793 1.1903 1.1071 1.0304 0.9601 0.8961>> y=asec(x)y =Columns 1 through 60 + 2.9932i 0 + 2.2924i0 + 1.8738i 0 + 1.5668i 0 +1.3170i 0 + 1.0986iColumns 7 through 80 + 0.8956i 0 + 0.6931i>> y=sinh(x)y =0.1002 0.2013 0.3045 0.4108 0.5211 0.6367 0.7586 0.8881>> y=cosh(x)y =1.0050 1.0201 1.0453 1.0811 1.1276 1.1855 1.2552 1.3374>> y=tanh(x)y = 0.0997 0.1974 0.2913 0.3799 0.4621 0.5370 0.6044 0.6640>> y=coth(x)y = 10.0333 5.0665 3.4327 2.6319 2.1640 1.8620 1.6546 1.5059>> y=sech(x)y = 0.9950 0.9803 0.9566 0.9250 0.8868 0.8436 0.7967 0.7477>> y=csch(x)y = 9.9834 4.9668 3.2839 2.4346 1.9190 1.5707 1.3182 1.1260>> y=asinh(x)y = 0.0998 0.1987 0.2957 0.3900 0.4812 0.5688 0.6527 0.7327>> y=acosh(x)y =Columns 1 through 60 + 1.4706i 0 + 1.3694i0 + 1.2661i 0 + 1.1593i 0 +1.0472i 0 + 0.9273iColumns 7 through 80 + 0.7954i 0 + 0.6435i>> y=atanh(x)y = 0.1003 0.2027 0.3095 0.4236 0.5493 0.6931 0.8673 1.0986>> y=acoth(x)y = Columns 1 through 60.1003 + 1.5708i 0.2027 + 1.5708i 0.3095 + 1.5708i 0.4236 + 1.5708i 0.5493 + 1.5708i 0.6931 + 1.5708i Columns 7 through 80.8673 + 1.5708i 1.0986 + 1.5708i >> y=asech(x)y = 2.9932 2.2924 1.8738 1.5668 1.3170 1.0986 0.8956 0.6931>> y=acsch(x)y = 2.9982 2.3124 1.9189 1.6472 1.4436 1.2838 1.1545 1.0476>> y=log(x)y =-2.3026 -1.6094 -1.2040 -0.9163 -0.6931 -0.5108 -0.3567 -0.2231>> y=log10(x)y = -1.0000 -0.6990 -0.5229 -0.3979 -0.3010 -0.2218 -0.1549 -0.0969>> y=log2(x)y =-3.3219 -2.3219 -1.7370 -1.3219 -1.0000 -0.7370 -0.5146 -0.3219>> c=complex(a,b)c = 0.1763 + 3.0000i 0.4103 + 3.0000i0.0099 + 4.0000i 0.1389 + 1.0000i 0.0153 + 3.0000i>> zc=conj(x)zc =0.1000 0.2000 0.3000 0.4000 0.5000 0.6000 0.7000 0.8000>> b=imag(x)b = 0 0 0 0 0 00 0>> a=real(x)a = 0.1000 0.2000 0.3000 0.40000.5000 0.6000 0.7000 0.8000>> y=fix(x)y = 0 0 0 0 0 0 0 0>> y=floor(x)y =0 0 0 0 0 0 0 0 >> y=ceil(x)y = 1 1 1 1 1 1 1 1>> y=round(x)y = 0 0 0 0 1 1 1 1>> y=sign(x)y = 1 1 1 1 1 1 1 1>> S=rats(x)S =1/10 1/5 3/10 2/5 1/2 3/5 7/10 4/5>> [N,D]=rat(x)N = 1 1 3 2 1 37 4D = 10 5 10 5 2 510 5>> A=[2 4 6;3 5 7;8 10 9]A = 2 4 63 5 78 10 9>> B=[4 1 5;7 5 0;9 3 6]B = 4 1 57 5 09 3 6>> A>Bans = 0 1 10 0 10 1 1>> A<Bans = 1 0 01 0 01 0 0>> A>=Bans = 0 1 10 1 10 1 1>> A<=Bans = 1 0 01 1 01 0 0>> A==Bans = 0 0 00 1 00 0 0>> A~=Bans =1 1 11 0 11 1 1>> A&Bans = 1 1 11 1 01 1 1>> A|Bans = 1 1 11 1 11 1 1>> ~Aans = 0 0 00 0 00 0 0>> ~Bans = 0 0 00 0 10 0 0>> x=0:pi/100:3*pi;>> y=sin(x);>> plot(x,y);>> y1=(x<pi|x>2*pi).*y;>> figure,plot(x,y1);>> r=(x>pi/3&x<2*pi/3)|(x>7*pi/3&8*pi/3);>> rn=~r;>> y2=r*sin(pi/3)+rn.*y1;>> figure,plot(x,y2)>> x=[0 4 5 9 8 6 74 85 7 4 85 8 4 5 8]x =0 4 5 9 8 6 74 85 7 4 85 8 4 5 8>> all(x)ans =0>> any(x)ans = 1>> find(x)ans =2 3 4 5 6 7 8 9 10 11 12 13 14 15>> isempty(x)ans =>> isglobal(x)Warning: isglobal is obsolete and will be discontinued. Type "help isglobal" for more details.ans =0>> isinf(x)ans =0 0 0 0 0 0 0 0 0 0 0 0 0 0 0>> isnan(x)ans =0 0 0 0 0 0 0 0 0 0 0 0 0 0 0>> isfinite(x)ans =1 1 1 1 1 1 1 1 1 1 1 1 1 1 1>> issparse(x)ans = 0>> isstr(x)ans =0>> not(x)ans =1 0 0 0 0 0 0 0 0 0 0 0 0 0 0>> y=[59 46 78 2 3 98 1 2 3 57 9 5 66 8 900 5]y =59 46 78 2 3 98 1 2 3 57 9 5 66 8 900 5>> y=[59 46 78 2 3 98 1 2 3 57 9 5 66 8 900 5]y = 59 46 78 2 3 98 1 2 3 57 9 5 66 8 900 5>> x=[0 4 5 9 8 6 74 85 7 4 85 8 4 5 8]x = 0 4 5 9 8 6 74 85 7 4 85 8 4 5 8>> A=[4 -40 2; 23 50 17;18 29 14]A = 4 -40 223 50 1718 29 14>> [r,c]=find(A>=20&A<=30)r = 23c = 12>> bitand(12,6)ans = 4>> bitshift(12,1)ans = 24>> bitxor(12,1)ans =13>> bitset(12,1)ans = 13 >> bitget(12,1)ans =0>> A =[ 87 59 56 85 66 21 12 35 62 64 69 88 99 81]A =87 59 56 85 66 21 1235 62 64 69 88 99 81>> A(2)ans =59>> A([1,2,8])ans =87 59 35>> A([9,6,2])ans =62 21 59>> A([end-4:end])ans =64 69 88 99 81>> A([1:5,5:-1:1])ans = 87 59 56 85 66 66 85 56 59 87>> A(3)=-1A = 87 59 -1 85 66 2112 35 62 64 69 88 99 81>> A(15)=-8A =87 59 -1 85 66 2112 35 62 64 69 88 99 81 -8>> A(20)=-1A = Columns 1 through 1687 59 -1 85 66 21 12 35 62 64 69 88 99 81 -8 0Columns 17 through 200 0 0 -1>> A=rand(8)A = 0.9501 0.8214 0.9355 0.13890.4451 0.8381 0.3046 0.37840.2311 0.4447 0.9169 0.2028 0.9318 0.0196 0.1897 0.86000.6068 0.6154 0.4103 0.1987 0.4660 0.6813 0.1934 0.85370.4860 0.7919 0.8936 0.6038 0.4186 0.3795 0.6822 0.59360.8913 0.9218 0.0579 0.2722 0.8462 0.8318 0.3028 0.49660.7621 0.7382 0.3529 0.1988 0.5252 0.5028 0.5417 0.89980.4565 0.1763 0.8132 0.0153 0.2026 0.7095 0.1509 0.82160.0185 0.4057 0.0099 0.7468 0.6721 0.4289 0.6979 0.6449>> A(3,3)ans =0.4103>> A(8)ans =0.0185>> sub2ind(size(A),3,3)ans =19>> [i,j]=ind2sub(size(A),19)i =3j =3>> A(:,4)ans =0.13890.20280.19870.60380.27220.19880.01530.7468>> A(3,:)ans =0.6068 0.6154 0.4103 0.1987 0.4660 0.6813 0.1934 0.8537>> A(end,:)ans =0.0185 0.4057 0.0099 0.7468 0.6721 0.4289 0.6979 0.6449>> A(3:4,5:6)ans =0.4660 0.68130.4186 0.3795>> A(2:2:4,1:2:5)ans =0.2311 0.9169 0.93180.4860 0.8936 0.4186>> A=reshape(A,5,5)A = 1 6 11 16 212 7 12 17 223 8 13 18 234 9 14 19 245 10 15 20 25>> A(:)'ans =Columns 1 through 161 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16Columns 17 through 2517 18 19 20 21 22 23 24 25>> A(:,1:2:5)=[]A = 6 167 178 189 1910 20>> A=[9 8 7;6 5 4;3 2 1];>> D=diag(A)D =951>> D1=diag(A,1)D1 =84>> D2=diag(A,-1)D2 =62>> V=[1 2 3 4];>> diag(V)ans = 1 0 0 00 2 0 00 0 3 00 0 0 4>> diag(1:3,-1)ans = 0 0 0 01 0 0 00 2 0 00 0 3 0>>A=[17,1,0,15;5,7,14,16;4,0,13,0;10,12,19,21]; >> D=diag(4:-1:1);>> D*Aans = 68 4 0 6015 21 42 488 0 26 010 12 19 21>> triu(A)ans =17 1 0 150 7 14 160 0 13 00 0 0 21>> triu(A,1)ans = 0 1 0 150 0 14 160 0 0 00 0 0 0>> B=A'B =17 5 4 101 7 0 120 14 13 1915 16 0 21>> rot90(A)ans =15 16 0 210 14 13 191 7 0 1217 5 4 10>> rot90(A,3)ans =10 4 5 1712 0 7 119 13 14 021 0 16 15>> B=fliplr(A)B = 15 0 1 1716 14 7 50 13 0 421 19 12 10>> B=flipud(A)B = 10 12 19 214 0 13 05 7 14 1617 1 0 15>> A=[4 5 6 9;7 8 9 5;4 5 6 9;7 8 9 5]; >> det(A)ans =0>> rank(A)ans =2>> cond(A)ans =1.0968e+017>> inv(A)Warning: Matrix is singular to working precision.ans = Inf Inf Inf InfInf Inf Inf InfInf Inf Inf InfInf Inf Inf Inf>> A=[4 8 9;8 2 7;6 3 8];>> inv(A)ans = 0.0568 0.4205 -0.43180.2500 0.2500 -0.5000-0.1364 -0.4091 0.6364>> [V,D]=eig(A)V = -0.6438 -0.7444 -0.5061-0.5467 0.6392 -0.5515-0.5354 0.1931 0.6631D = 18.2776 0 00 -5.2030 00 0 0.9254>> [U,S,D]=svd(A)U = -0.6378 0.7375 -0.2220-0.5426 -0.6348 -0.5500-0.5465 -0.2304 0.8051S = 18.9278 0 00 5.2884 00 0 0.8791D = -0.5374 -0.6639 -0.5200-0.4135 0.7449 -0.5236-0.7350 0.0663 0.6749>> [L,U]=lu(A)L = 0.5000 1.0000 01.0000 0 00.7500 0.2143 1.0000U = 8.0000 2.0000 7.00000 7.0000 5.50000 0 1.5714>> [Q,R]=qr(A)Q = -0.3714 0.9114 -0.1774-0.7428 -0.4063 -0.5322-0.5571 -0.0659 0.8278 R =-10.7703 -6.1279 -12.99870 6.2808 4.83140 0 1.3009>> a=1234a = 1234>> class(a)ans =double>> size(a)ans = 1 1>> b='1234'b =1234>> class(b)ans =char>> size(b)ans = 1 4>> 'I am astudent'ans =I am astudent>> a='This is No.2.23 Example!'a =This is No.2.23 Example!>> b=a(1:7)b =This is>> c=a(12:end)c =2.23 Example!>> a='Good';>> b='Noon';>> length(a)==length(b)ans = 1>> c=[a,'',b]c =GoodNoon>> d=[a;b]d =GoodNoon>> size(c)ans = 1 8>> size(d)ans = 2 4>> a='Good Noon';>> b=double(a)b = 71 111 111 100 32 78 111 111 110>> c='再见!'c =再见!>> c='再见!'>> d=double(c)d = 20877 35265 65281>> char(d)ans =再见!>> a='The first string';>> b='The second string';>> c=strcmp(a,b)c =0>> d=strncmp(a,b,4)d =1>> X='A friend in need is a friend indeed'; >> Y='friend';>> a=findstr(Y,X)a = 3 23>> b=strfind(Y,X)b = []>> S=['1 2 3';'2 3 4'];>> A=str2num(S)A = 1 2 32 3 4>> B=str2num('6-8i')B = 6.0000 - 8.0000i>> D=num2str(rand(2,3),6)D =0.950129 0.606843 0.8912990.231139 0.485982 0.762097>> d=189;>> h=dec2hex(d)h =BD>> c=dec2base(d,7)c =360>> b=dec2bin(d)b =10111101>> bin2dec(b)ans = 189>> A={ones(3,3,3),'Welcome';30.34,1:200} A = [3x3x3 double] 'Welcome'[ 30.3400] [1x200 double]>>B=[{ones(3,3,3)},{'Welcome'};{30.34},{1:20 0}]B = [3x3x3 double] 'Welcome'[ 30.3400] [1x200 double]>> C={5}C = [5]>> C(2,3)={7}C = [5] [] [][] [] [7]>> isequal(A,B)ans =1>> A={ones(3,3,3),'Welcome';30.34,1:200}; >> b=A(1,2)b = 'Welcome'>> class(B)ans =cell>> C=A{1,2}C =Welcome>> class Cans =char>> D=A{1,2}(6)D =m>> E=A{2,2}([end:-1:190])E =200 199 198 197 196 195 194 193 192 191 190>> class(E)ans =double>> N=A{3}([1 3 5 7])N =Wloe>> A={ones(3,3,3),'Welcome';30.34,1:200}; >> B=cell(2);>> B(:,1)={char('Good','Morning');1:10}B = [2x7 char ] [][1x10 double] []>> C=[A,B]C = [3x3x3 double] 'Welcome' [2x7 char ] [][ 30.3400] [1x200 double] [1x10 double] []>> D=[A,B;C]D = [3x3x3 double] 'Welcome' [2x7 char ] [][ 30.3400] [1x200 double] [1x10 double] [][3x3x3 double] 'Welcome' [2x7 char ] [][ 30.3400] [1x200 double] [1x10 double] []>> D(4,:)=[]D = [3x3x3 double] 'Welcome' [2x7 char ] [][ 30.3400] [1x200 double] [1x10 double] [][3x3x3 double] 'Welcome' [2x7 char ] []>> E=reshape(D,2,3,2)E(:,:,1) = [3x3x3 double] [3x3x3 double] [1x200 double][ 30.3400] 'Welcome' 'Welcome'E(:,:,2) = [2x7 char ] [2x7 char] [][1x10 double] [] []>>A={randn(3,3,2),'Good',pi;29,4+7*i,zeros(4)} A = [3x3x2 double] 'Good' [ 3.1416][ 29] [4.0000+ 7.0000i] [4x4 double]>> B=cellfun('isreal',A)B = 1 1 11 0 1>> C=cellfun('length',A)C = 3 4 11 1 4>> Member.code='09021';>> ='Liu';>> Member.age=22;>> Member.grade=uint16(3);>> MemberMember =code: '09021'name: 'Liu'age: 22grade: 3>> Member(4).name='Wang';>> Member(4).grade=2;>> Member(2)ans = code: []name: []age: []grade: []>>Memebr=struct('code','09021','name','Liu','a ge',22,'grade',uint16(3))Memebr = code: '09021'name: 'Liu'age: 22grade: 3>>Member=struct('code',{'09021','09034'},'name' ,{'Liu','Wamg'},'age',{22,24},'grade',{2,3}) Member = 1x2 struct array with fields:codenameagegrade>>Member=struct('code',{},'name',{},'age',{},'gr ade',{})Member = 0x0 struct array with fields:codenameagegrade>>Member=struct('code',{'09021','09034'},'na me',{'Liu','Wang'},'age',{22,24},'grade',{2,3},' score',{[78 89;90 68],[91 76;89 97]}) Member = 1x2 struct array with fields:codenameagegradescore>> Member(1).scoreans =78 8990 68>> Member(2).score(2,:)ans =89 97>> Member.codeans =09021ans =09034>> Member.('name')ans =Liuans =Wang>> ='Liu';M.ID=1;>> M(2,2).name='Wang';M(2,2).ID=2; >> M2=setfield(M,{2,1},'name','Zhang'); >> ans =Liuans =[]ans = []ans =Wang>> ans =Liuans =Zhangans = []ans =Wang>> fieldnames(M)ans = 'name''ID'>> M3=orderfields(M)M3 = 2x2 struct array with fields:IDname。
武汉工程大学matlab实验二离散时间信号的分析实验【范本模板】
武汉工程大学数字信号处理实验报告二专业班级:14级通信03班学生姓名:秦重双学号:1404201114实验时间:2017年5月3日实验地点:4B315指导老师: 杨述斌实验一离散时间信号的分析实验一、实验目的①认识常用的各种信号,理解其数学表达式和波形表示。
②掌握在计算机中生成及绘制数值信号波形的方法。
③掌握序列的简单运算及计算机实现与作用。
④理解离散时间傅里叶变换、Z变换及它们的性质和信号的频域特性。
二、实验设备计算机,MATLAB语言环境。
三、实验基础理论1、序列的相关概念离散时间信号用一个称为样本的数字序列来表示。
一般用{x[n]}表示,其中自变量n的取值范围是﹣∞到﹢∞之间的整数。
为了表示方便,序列通常直接用x[n]表示。
离散时间信号可以是一个有限长序列,也可以是一个无限长序列。
有限长(也称为有限时宽)序列仅定义在有限的时间间隔中:﹣∞≤N1 ≤N2 ≤+∝。
有限长序列的长度或时宽为N=N1 -N2+1。
满足x[n+kN]=x[n](对于所有n)的序列称为周期为N的周期序列,其中N取任意正整数;k取任意整数;2、常见序列常见序列有单位取样值信号、单位阶跃序列、矩形序列、斜变序列、单边指数序列、正弦序列、复指数序列等。
3、序列的基本运算序列的基本运算有加法、乘法、倒置(反转)、移位、尺度变换、卷积等。
4、离散傅里叶变换的相关概念5、Z变换的相关概念四.实验内容与步骤1、知识准备认真复习以上基础理论,理解本实验所用到的实验原理。
2、离散时间信号(序列)的产生利用MATLAB语言编程和绘制单位样值信号、单位阶跃序列、指数序列、正弦序列及随机离散信号的波形,以加深对离散信号时域表示的理解。
①单位取样值信号Matlab程序x=0;y=1;stem(x,y);title('单位样值’);axis([—2,2,0,1]);②单位阶跃序列Matlab程序n0=0;n1=—5;n2=5;n=[n1:n2];x=[(n—n0)>=0];stem(n,x);xlabel('n');ylabel(’x(n)’);title(’单位阶跃序列’);③指数序列、正弦序列Matlab程序n=[0:10];x=(1/3)。
Matlab实验报告_2

实验一 Matlab基础知识一、实验目的:1.熟悉启动和退出Matlab的方法。
2.熟悉Matlab命令窗口的组成。
3.掌握建立矩阵的方法。
4.掌握Matlab各种表达式的书写规则以及常用函数的使用。
二、实验内容:1.求[100,999]之间能被21整除的数的个数。
(rem)2.建立一个字符串向量,删除其中的大写字母。
(find)3.输入矩阵,并找出其中大于或等于5的元素。
(find)4.不采用循环的形式求出和式6312ii=∑的数值解。
(sum)三、实验步骤:●求[100,199]之间能被21整除的数的个数。
(rem)1.开始→程序→Matlab2.输入命令:»m=100:999;»p=rem(m,21);»q=sum(p==0)ans=43●建立一个字符串向量,删除其中的大写字母。
(find)1.输入命令:»k=input('’,’s’);Eie48458DHUEI4778»f=find(k>=’A’&k<=’Z’);f=9 10 11 12 13»k(f)=[ ]K=eie484584778●输入矩阵,并找出其中大于或等于5的元素。
(find)1.输入命令:»h=[4 8 10;3 6 9; 5 7 3];»[i,j]=find(h>=5)i=3 j=11 22 23 21 32 3●不采用循环的形式求出和式的数值解。
(sum)1.输入命令:»w=1:63;»q=sum(2.^w)q=1.8447e+019实验二 Matlab 基本程序一、 实验目的:1. 熟悉Matlab 的环境与工作空间。
2. 熟悉M 文件与M 函数的编写与应用。
3. 熟悉Matlab 的控制语句。
4. 掌握if,switch,for 等语句的使用。
二、 实验内容:1. 根据y=1+1/3+1/5+……+1/(2n-1),编程求:y<5时最大n 值以及对应的y 值。
matlab 实验报告

matlab 实验报告Matlab实验报告引言:Matlab是一种强大的数值计算和可视化软件,广泛应用于科学、工程和经济等领域。
本实验报告将介绍我在使用Matlab进行实验过程中的一些经验和结果。
实验一:矩阵运算在这个实验中,我使用Matlab进行了矩阵运算。
首先,我创建了一个3x3的矩阵A和一个3x1的矩阵B,并进行了矩阵相乘运算。
通过Matlab的矩阵乘法运算符*,我得到了一个3x1的结果矩阵C。
接着,我对矩阵C进行了转置操作,得到了一个1x3的矩阵D。
最后,我计算了矩阵C和矩阵D的点积,并将结果输出。
实验二:数据可视化在这个实验中,我使用Matlab进行了数据可视化。
我选择了一组实验数据,包括时间和温度两个变量。
首先,我将数据存储在一个矩阵中,并使用Matlab的plot函数将时间和温度之间的关系绘制成曲线图。
接着,我使用Matlab的xlabel、ylabel和title函数添加了横轴、纵轴和标题。
最后,我使用Matlab的legend函数添加了图例,以便更好地理解图表。
实验三:数值积分在这个实验中,我使用Matlab进行了数值积分。
我选择了一个函数f(x)进行积分计算。
首先,我使用Matlab的syms函数定义了符号变量x,并定义了函数f(x)。
接着,我使用Matlab的int函数对函数f(x)进行积分计算,并将结果输出。
为了验证结果的准确性,我还使用了Matlab的diff函数对积分结果进行了求导操作,并与原函数f(x)进行了比较。
实验四:信号处理在这个实验中,我使用Matlab进行了信号处理。
我选择了一个音频文件,并使用Matlab的audioread函数读取了该文件。
接着,我使用Matlab的fft函数对音频信号进行了傅里叶变换,并将结果绘制成频谱图。
为了进一步分析信号的特征,我还使用了Matlab的spectrogram函数绘制了信号的时频图。
通过对信号的频谱和时频图的观察,我可以更好地理解信号的频率和时域特性。
MATLAB实验报告 (2)

广西大学实验报告纸姓名:徐律1002100405电气工程学院自动化102班2012年12月27日【实验名称】MATLAB的图形绘制【实验要求】1、学习MATLAB图形绘制的基本方法;2、熟悉和了解MATLAB图形绘制程序编辑的基本指令;3、熟悉掌握利用MATLAB图形编辑窗口编辑和修改图形界面,并添加图形的各种标注;4、掌握plot、subplot的指令格式和语法。
【实验基本知识】1、plot(x,y)------绘制由x,y所确定的曲线;2、多组变量绘图:plot(x1, y1, 选项1, x2, y2, 选项2, ……);3、双Y轴绘图:plotyy()函数;4、图形窗口的分割;5、图形编辑窗口的使用。
【实验内容】【1】二维曲线绘图基本指令演示。
本例运作后,再试验plot(t), plot(Y), plot(Y,t) ,以观察产生图形的不同。
t=(0:pi/50:2*pi)';k=0.4:0.1:1;Y=cos(t)*k;plot(t,Y)plot(t,Y); plot(t);plot(Y);plot(Y,t); %图形如下图所示【2】用图形表示连续调制波形Y=sin(t)sin(9t)及其包络线。
t=(0:pi/100:pi)';y1=sin(t)*[1,-1];y2=sin(t).*sin(9*t);t3=pi*(0:9)/9;y3=sin(t3).*sin(9*t3);plot(t,y1,'r:',t,y2,'b',t3,y3,'bo')axis([0,pi,-1,1])【3】在一个图形窗口绘制正弦和余弦曲线,要求给图形加标题“正弦和余弦曲线”,X轴Y轴分别标注为“时间t”和“正弦、余弦”,在图形的某个位置标注“sin(t)”“cos(t)”,并加图例,显示网格,坐标为正方形坐标系。
实验程序:实验结果:Sin(t)Cos(t)【4】绘制向量x=[1 3 0.5 2.5 2]的饼形图,并把3对应的部分分离出来。
matlab实验报告实验二
matlab实验报告实验二Matlab实验报告实验二引言Matlab是一种功能强大的数学软件,广泛应用于科学研究和工程实践中。
在实验二中,我们将探索Matlab的图像处理功能,并通过实际案例来展示其应用。
图像处理基础图像处理是指对图像进行数字化处理的过程,其目的是改善图像质量、提取有用信息或实现特定的应用需求。
在Matlab中,我们可以利用各种函数和工具箱来实现图像处理的各种任务,如图像增强、滤波、分割和特征提取等。
实验步骤1. 图像读取与显示在Matlab中,我们可以使用imread函数读取图像文件,并使用imshow函数将图像显示在屏幕上。
例如,我们可以读取一张名为"lena.jpg"的图像,并显示出来:```matlabimg = imread('lena.jpg');imshow(img);```2. 图像灰度化图像灰度化是将彩色图像转换为灰度图像的过程。
在Matlab中,我们可以使用rgb2gray函数将彩色图像转换为灰度图像。
例如,我们可以将上一步读取的图像转换为灰度图像:```matlabgray_img = rgb2gray(img);imshow(gray_img);```3. 图像二值化图像二值化是将灰度图像转换为二值图像的过程,其中只包含黑色和白色两种颜色。
在Matlab中,我们可以使用imbinarize函数将灰度图像二值化。
例如,我们可以将上一步得到的灰度图像二值化:```matlabbinary_img = imbinarize(gray_img);imshow(binary_img);```4. 图像平滑图像平滑是指去除图像中的噪声或细节,使得图像更加平滑和清晰。
在Matlab 中,我们可以使用imfilter函数对图像进行平滑处理。
例如,我们可以对上一步得到的二值图像进行平滑处理:```matlabsmooth_img = imfilter(binary_img, fspecial('average'));imshow(smooth_img);```5. 图像边缘检测图像边缘检测是指提取图像中物体边缘的过程,常用于目标检测和图像分割。
MATLAB第二章实验报告
深 圳 大 学 实 验 报 告课程名称: MATLAB实验名称: MATLAB 的数值计算学 院:指导教师:报告人: 组号:学号 实验地点实验时间: 年 月 日提交时间:二、内容和步骤1.创建矩阵(1)直接输入(2)用from:step:to方式(3)用linspace函数:(4)使用特殊矩阵函数,并修改元素(5)获取子矩阵块:.练习:b=logspace(0,4*3.14,20)b =1.0e+12 *1 至17 列0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0001 0.0004 0.0018 0.0082 0.037718 至20 列0.1729 0.7924 3.63082.矩阵运算:(1)利用矩阵除法解线性方程组(2)利用矩阵的基本运算求解矩阵方程练习:(3)计算矩阵的特征值和特征向量。
验证特征值和特征向量与该矩阵的关系练习:将矩阵的乘除运算改为数组的点乘和点除运算:(4)利用数学函数进行矩阵运算w=logspace(-2,1,10)w =0.0100 0.0215 0.0464 0.1000 0.2154 0.4642 1.0000 2.1544 4.6416 10.0000LW=-20*log10(sqrt((2*w).^2 + 1))LW =-0.0017 -0.0081 -0.0373 -0.1703 -0.7396 -2.6993 -6.9897 -12.9151 -19.4040 -26.0314FW=-atan(2*w)*180/piFW =-1.1458 -2.4673 -5.3037 -11.3099 -23.3106 -42.8711 -63.4349 -76.9341 -83.8517 -87.13763.生成多维数组:c(18)=[]c =1 2 3 4 5 6 7 8 9 1 2 3 4 5 6 7 8练习:使用数组c编辑窗口查看变量a,b和c。
MATLAB实验报告二
实验二 Matlab语言程序设计一、实验内容:1、编写命令文件:计算 1+2+…+n<2000 时的最大 n 值;>> n=1; %将变量初值设为1sum=0;while((sum+n)<2000) %若s<2000成立,则执行下一条语句,否则结束本循环sum=sum+n; %求和运算n=n+1;endsum,n-1 %显示最终s和nsum =1953ans =622、编写函数文件:分别用 for 和 while 循环结构编写程序,求 2 的 0 到 15 次幂的和。
function xunhuan(x)sum=0;for(i=0:x)sum=sum+2^i;endy=sum>> xunhuan(15)y =65535function whilexun(x)sum=0;i=0;while(i<x)sum=sum+2^i;i=i+1;endy=sum>> whilexun(16)y =655353、如果想对一个变量 x 自动赋值。
当从键盘输入 y 或 Y 时(表示是),x 自动赋为 1;当从键盘输入 n 或 N 时(表示否),x 自动赋为 0;输入其他字符时终止程序。
a=input('输入一个字符:');switch acase 'y'x=1case 'Y'x=1case 'n'x=0case 'N'x=0otherwiseend输入一个字符:'Y'x =1二、实验思考题1.用FOR和WHILE语句有何要求?答:for语句的基本命令格式为for 循环变量=表达式1表达式3表达式2循环语句组End表达式1、表达式3、表达式2的定义和C语言相似即首先执行循环变量的初始值赋成表达式1的值然后判断循环变量的值介于表达式1和表达式2的值之间则执行循环体中的语句否则结束循环语句的执行。
matlab实验报告

matlab实验报告引言:Matlab(矩阵实验室)是一款功能强大的数值计算和科学计算软件,广泛应用于工程、科学和经济等领域。
本实验报告将探讨我在使用Matlab进行实验过程中的心得体会和实验结果。
实验一:图像处理在这个实验中,我使用Matlab对一张图像进行了处理,并应用了各种图像处理算法。
这包括图像增强、边缘检测和图像分割等技术。
通过Matlab的图像处理工具箱,我能够轻松调用各种算法函数,并对图像进行快速处理。
实验结果表明,Matlab图像处理工具箱提供了丰富的函数和算法,极大地方便了我们的图像处理工作。
实验二:模拟信号处理模拟信号处理是Matlab中的一个重要应用领域。
在这个实验中,我模拟了一个带噪声的正弦信号,并使用Matlab进行了噪声滤波和频谱分析。
通过使用Matlab的滤波函数,我能够有效地去除信号中的噪声,并还原出原始信号。
同时,Matlab提供了功能强大的频谱分析工具,我可以轻松地对信号的频率特性进行分析和可视化。
实验三:数据分析与统计数据分析与统计是Matlab的另一个重要应用领域。
在这个实验中,我使用Matlab对一组实验数据进行了分析和统计。
通过使用Matlab的统计函数和工具,我能够计算出数据的均值、方差、标准差等统计指标,并绘制出数据的直方图和散点图。
这些统计分析结果对我的实验研究提供了有力的支持,并帮助我更好地理解实验数据。
实验四:数值计算与优化数值计算与优化是Matlab的核心功能之一。
在这个实验中,我使用Matlab进行了一组数值计算和优化实验。
通过使用Matlab的数值计算函数和优化工具箱,我能够快速计算出复杂的数学问题,并找到最优解。
同时,在进行优化实验时,我可以设置各种约束条件和目标函数,从而得到最优解的参数值。
这些数值计算和优化工具极大地提高了我的研究效率和准确度。
结论:通过这些实验,我深刻认识到Matlab的强大功能和广泛应用领域。
无论是图像处理、信号处理、数据分析还是数值计算与优化,Matlab都提供了丰富的函数和工具,让我们能够快速高效地完成实验和研究工作。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
仲恺农业工程学院实验报告纸_自动化学院_(院、系)_工业自动化_专业_144_班_Matlab仿真控制实践课程实验一MATLAB绘图基础一、实验目的了解MATLAB常用命令和常见的内建函数使用。
熟悉矩阵基本运算以及点运算。
掌握MATLAB绘图的基本操作:向量初始化、向量基本运算、绘图命令plot,plot3,mesh,surf 使用、绘制多个图形的方法。
二、实验内容建立并执行M文件multi_plot.m,使之画出如图的曲线。
三、实验方法四、实验要求1.分析给出的MA TLAB参考程序,理解MA TLAB程序设计的思维方法及其结构。
2.添加或更改程序中的指令和参数,预想其效果并验证,并对各语句做出详细注释。
对不熟悉的指令可通过HELP查看帮助文件了解其使用方法。
达到熟悉MA TLAB画图操作的目的。
3.总结MATLAB中常用指令的作用及其调用格式。
五、实验思考1、实现同时画出多图还有其它方法,请思考怎样实现,并给出一种实现方法。
(参考程序如下)2、思考三维曲线(plot3)与曲面(mesh, surf)的用法,(1)绘制参数方程233,)3cos(,)3sin()(t z e t t y e t t t x t t ===--的三维曲线;(2)绘制二元函数xyy x ex x y x f z ----==22)2(),(2,在XOY 平面内选择一个区域(-3:0.1:3,-2:0.1:2),然后绘制出其三维表面图形。
(以下给出PLOT3和SURF 的示例)绘制题目要求曲面:%绘制二元函数,在XOY平面内选择一个区域(-3:0.1:3,-2:0.1:2)仲恺农业工程学院实验报告纸_自动化学院_(院、系)_工业自动化_专业_144_班_Matlab 仿真控制实践 课 程实验二:基于Simulink 的控制系统仿真实验目的1. 掌握MATLAB 软件的Simulink 平台的基本操作; 2. 能够利用Simulink 平台研究PID 控制器对系统的影响;实验原理PID (比例-积分-微分)控制器是目前在实际工程中应用最为广泛的一种控制策略。
PID 算法简单实用,不要求受控对象的精确数学模型。
1.模拟PID 控制器典型的PID 控制结构如图1所示。
`图1 典型PID 控制结构 连续系统PID 控制器的表达式为()()()()tp I Dde t x t K e t K e d K dt ττ=++⎰ (1)式中,P K ,IK 和DK 分别为比例系数,积分系数和微分系数,分别是这些运算的加权系数。
对式(7-21)进行拉普拉斯变换,整理后得到连续PID 控制器的传递函数为1()(1)I C P D P D I K G s K K s K T s s T s =++=++ (2)显然P K ,IK 和DK 这3个参数一旦确定(注意/,/I P I D D PT K K T K K ==),PID 控制器的性能也就确定下来。
为了避免微分运算,通常采用近似的PID 控制器,气传递函数为1()(1)0.11D C P I D T s G s K T s T s =+++ (3)实验过程PID 控制器的P K ,I K 和D K 这3三个参数的大小决定了PID 控制器的比例,积分和微分控制作用的强弱。
下面请通过一个直流电动机调速系统,利用MA TLAB 软件中的Simulink 平台,使用期望特性法来确定这3个参数的过程。
并且分析这3个参数分别是如何影响控制系统性能的。
【问题】某直流电动机速度控制系统如图2所示,采用PID 控制方案,使用期望特性法来确定P K ,IK 和DK 这3三个参数。
期望系统对应的闭环特征根为:-300,-300,-30+j30和-30-j30。
请建立该系统的Simulink 模型,观察其单位阶跃响应曲线,并且分析这3个参数分别对控制性能的影响。
图2 直流电动机PID 控制系统 (1)使用期望特性法来设计PID 控制器。
首先,假设PID 控制器的传递函数为:()IC PD K G s K K s s =++,其中P K ,I K 和D K 这3个参数待定。
图2所示的系统闭环的传递函数为2432113120550()()660(36801357447)(4860001357447)1357447D P I B D P I K s K s K G s s s K s K s K ⨯++=++++++如果希望闭环极点为:-300,-300,-30+j30和-30-j30,则期望特征多项式为:4326660127800648000016210s s s s ++++⨯。
对应系数相等,可求得:0.067D K =, 4.4156P K =,119.34I K =。
在命令窗口中输入这3个参数值,并且建立该系统的Simulink模型,如图3所示。
图3直流电动机PID 控制系统的Simulink 仿真模型输入信号为单位阶跃信号,在t=1s 时从0变化到1。
系统响应曲线如图4所示。
(2)分析比例系数PK 对控制性能的影响在119.34I K =和0.067D K =保持不变的情况下,PK 分别取值0.5,5和20,系统的响应曲线如图5所示。
可见,当PK 取值较小时系统的响应较慢,而当PK取值较大时图4直流电动机PID 控制系统响应曲线系统的响应速度较快,但超调量增加。
(3)分析积分系数IK 对控制性能的影响在0.067D K =和4.4156P K =保持不变的情况下,IK 分别取值20,120,300,系统的响应曲线如图6所示。
可见,当IK 取值较小时系统响应进入稳态的速度较慢。
而当IK 取较大值时系统的响应进入稳态的速度较快,但超调量增加。
图5 改变P K 时的系统响应曲线(分别取0.5、5、20)(4)分析微分系数DK 对控制性能的影响 在4.4156P K =和119.34I K =保持不变的情况下,DK 分别取值0.01,0.07,0.2,系统的响应曲线如图7所示。
可见,当DK 取值较小时系统响应对变化趋势的调节较慢。
超调量较大。
而当DK 取值较大时系统的响应进入稳态的速度较快。
但是超调量增加。
当DK 取值过大时,对变化趋势的调节过强,阶跃响应的初期出现尖脉冲。
图6 改变IK 时的系统响应曲线(分别取20、120、300)实验总结比例控制器的控制规律为)()(t e K t u p p =当偏差e(t)不为0,比例控制器就会产生控制作用,比例系数Kp 决定控制作用的强弱,增大比例系数Kp 可提高控制灵敏度,加快系统动态响应速度,减小稳态误差,但是无法消除静差。
此外,Kp 过大会降低系统的动态品质,引起被控量的振荡,甚至导致闭环系统不稳定。
积分控制器的控制规律为⎰⨯=ti p i dtt e T K t u 0)(1)(其中,积分时间常数Ti 表示积分速度的快慢,Ti 越大,积分速度越慢,积分作用越弱,反之则越强。
它可以消除静差,但积分作用缓慢,不能及时克服扰动的影响,降低了系统的快速性,一半不单独使用。
微分控制器的控制规律为dtt de T K t d p d )()(u ⨯= 微分控制作用与偏差的变化速度成正比,能够预测偏差的变化,从而产生超前控制作用,以阻止偏差的变化。
微分时间常数Td 表示微分速度的快慢,Td 越大,微分作用越强,反之则越弱。
微分控制可以加快系统的动态响应,减少超调量,但不能消除静差,且只在偏差刚刚出现时产生控制作用。
根据以上可知,理想的控制系统是PID 控制,综合了P 、I 、D 三种控制的优点,既有比例控制的迅速调节,又有积分控制消除稳态误差的能力,还有微分控制的超前控制作用,只要合理选择控制参数Kp 、Ti 、Td ,便可发挥三种控制规律的优点,得到很好的控制效果。
仲恺农业工程学院实验报告纸_自动化学院_(院、系)_工业自动化_专业_144_班_Matlab 仿真控制实践 课 程实验三 控制系统数学模型转换及MATLAB 实现一、实验目的熟悉MATLAB 的实验环境。
掌握MATLAB 建立系统数学模型的方法。
二、实验内容用MA TLAB 做如下练习。
(1)用2种方法建立系统2)(2+=s s G 的多项式模型。
(2)用2种方法建立系统)10)(5)(1()1(10)(++++=s s s s s G 的零极点模型和多项式模型。
(3)如图,已知G (s )和H (s )两方框对应的微分方程是:)(20)(10)(6t e t c dt t dc =+ )(10)(5)(20t c t b dtt db =+且初始条件为零。
试求传递函数C(s)/R(s)及E(s)/R(s)。
三、实验思考1、如何灵活选择函数的各种不同调用方法。
答:当传递函数的分子、分母都是多项式的形式或分子、分母含有的分式较为简单并且易化简时,多采用多项式模型来建立系统传递函数模型。
其中,多项式模型又有两种方法(详见实验内容(1)),第一种方式需要先求出分子分母多项式,再将其作为tf函数的参数使用,第二种方式需先定义Laplace算子,将传递函数直接赋给对象。
当传递函数含有较多分式(即零极点)时,一般采用零极点模型来建立传递函数模型,它又包含两种方式,一种是直接将零极点向量和增益值赋给zpk函数;另一种是先定义零极点形式的Laplace算子,再输入零极点模型。
2、复杂系统如何用MA TLAB建立系统模型,如何对结构图进行化简。
答:对于复杂的系统,一般不采用上述的零极点模型或传递函数模型,而是采用Simulink来进行图形化系统建模,只要知道各模块的参数便可以建立相应模型,还可以在Simulink中进行仿真。
结构图的化简主要有以下的变换方式:1)串联方框连接及其等效变换;2)并联方框连接及其等效变换;3)方框反馈链接及其等效变换;4)引出点前后移动等效变换;5)相邻引出点之间的移动变换;6)综合点前后移动等效变换;7)相邻综合点之间的移动等效变换;3、求系统传递函数有哪些方法?各有何特点?适用于什么情况。
答:个人认为,在Matlab中有两种方法求传递函数,第一种是利用传递函数模型和零极点模型,建立各部分传递函数模型,然后利用Matlab自带的传递函数化简函数进行化简,最后输出,该方法适用于环节不多且没有较为复杂反馈环节的情况下;第二种是在Simulink中建立方框图模型,利用Simulink来求传递函数和化简。
在环节较多且较为复杂是,使用Simulink可以节省很多时间。
仲恺农业工程学院实验报告纸_自动化学院_(院、系)_工业自动化_专业_144_班_Matlab 仿真控制实践 课 程实验四 控制系统的MATLAB 辅助分析一、实验目的熟悉基于MATLAB 的系统稳定性分析。