重型支援桥吊机上摆臂优化设计
重型特种车底盘摆臂支架拓扑优化设计研究
重型特种车底盘摆臂支架拓扑优化设计研究杨献学;张庆;夏闽;邓克军;李陆浩【摘要】针对重型特种车摆臂支架,通过建立整车多体动力学模型,计算得到了摆臂支架在车辆满载、紧急制动和超载工况下的受力.采用变密度法对摆臂支架展开了以结构加权应变能(Weighted Compliance)最小为优化目标,结构位移、体积分数、应力和拔模方向为约束条件的结构拓扑优化设计,并对优化后的摆臂支架进行多工况条件下的强度计算.结果表明,在结构静强度满足设计要求的同时,优化后摆臂支架的质量降低了20.6%,同时实现了摆臂支架结构一体化铸造加工的目标.【期刊名称】《汽车工程学报》【年(卷),期】2016(006)001【总页数】6页(P29-34)【关键词】特种车;摆臂支架;拓扑优化;有限元分析【作者】杨献学;张庆;夏闽;邓克军;李陆浩【作者单位】北京航天发射技术研究所,北京100076;北京航天发射技术研究所,北京100076;北京航天发射技术研究所,北京100076;北京航天发射技术研究所,北京100076;北京航天发射技术研究所,北京100076【正文语种】中文【中图分类】TJ812+.6摆臂支架是重型特种车底盘的重要结构件,起到连接车轮总成与车架纵梁的作用。
一方面,车辆的所有负载都将直接通过摆臂支架传递给车轮,实现车轮对整个车辆的承载。
同时,车轮在不平路面激励和制动工况下所承受的载荷也将通过摆臂支架传递给车架纵梁。
因此,摆臂支架是重型特种车底盘重要的承力结构件,载荷环境十分恶劣,其结构设计的优劣将影响底盘结构整体的可靠性和安全性。
本文研究的底盘摆臂支架原结构采用多片钢板焊接工艺,焊接完成的摆臂支架结构安装到车架后往往还需要对摆臂销孔等进行二次机加工,既降低了底盘装配效率,也影响了结构装配精度。
此外,焊接式摆臂支架还会影响到车架纵梁的结构形式及布置,影响主减速器等结构的拆装及可维修性,带来了诸多弊端。
在设计某新型特种车摆臂支架结构时,摆臂支架设计采用一体化铸造工艺,以提高特种车底盘结构件安装、拆卸及维修的效率和灵活性。
重型支援桥吊机上摆臂优化设计

为合理优化结果 J 。
1 有 限元分析及拓 扑优化
有限元方法作为一种非 常有效 的数 值方法 , 已为工程 界所普遍接受和广泛使用 , 在机 械制造 、 料加工 、 材 航空
航天 、 汽车 、 土木建筑 、 电子电器 、 国防军工 、 船舶 、 铁道 、 石 化、 能源 、 科学研究 等各 个领域 为解 决 复杂 的工程 分析 计
性、 非线性 、 结构优化 、 固耦合 和多 刚体动力学 等多个方 流
面, 具有 良好 的开放性 、 活性 和友好 的用户界面 。O t t 灵 pi . S
算问题提供了有效途径 J 。在工程 实践 中 , 限元分 析 有 软件与 C D系统的集成应用使研究 、 A 设计水平发生 了质 的
飞跃 。
rc是其 中的一个模块 , ut 除了能够完成 结构优化分析之外 , 也 能胜 任诸如静态 、 动态 、 热学等一般性分析任务。
目前 , 有限元分 析软件大 多已经实现 了与 C D软件 的 A 无缝集成 , 具有 了更 为强 大 的网格处 理 能力 , 由单一 的求 解线性问题发展到求解非线性 问题 , 由单一 的结构场求 解 发展到耦合场 问题 的求 解 , 具有 更为直 观 的可视化前处 理 和后处理 功能 , 更为人性化。
紫 收 稿 日期 :00— 3— 2 2 1 0 0
作者简介 : 卞士川 (9 O ) 男 , 17一 , 硕士 , 工程师 , 主要 从事装备论证研究 。
四 川 兵 工 学 报
钢, 弹性模量为 2 O 5 泊松 比取为 0 3 密度为 7 8 E一 。 .E , ., . 5 9 表 1 各种工况下位 移、 应力对照
中图分类号 :J1 T8 2 文献标识码 : A 文章编号 :0 6一 7 7 2 l )5— 0 5— 4 10 o o (O O O 0 6 0 法主要有 均匀 化方 法、 变密 度方 法和 渐进结 构优 化法 ] 。 均匀 化方法的基 本思 想是 在组 成结 构 的材料 中引入 微结
重卡双前桥转向摇臂机构的优化设计

重卡双前桥转向摇臂机构的优化设计
古玉锋 方宗德 沈云波
西 北 工 业 大 学 ,西 安 ,710072
摘 要 :针 对 重 卡 双 前 桥 转 向 摇 臂 机 构 传 统 单 目 标 优 化 方 法 考 虑 因 素 的 不 足 ,提 出 了 以 二 轴 左 轮 转 角 误 差 最 小 、转 向 杆 系 与 悬 架 运 动 的 最 大 干 涉 量 最 小 、左 右 转 向 力 不 均 匀 性 最 小 为 综 合 优 化 目 标 的 多 目 标 优化模型。车轮转角误差模型通过将摇臂机构拆分的方法得到,悬架与 转 向 杆 系 的 干 涉 模 型 通 过 建 立 转向直拉杆与悬架的空间运动模型得到,左右转向力不均匀性通过计 算 转 向 传 动 机 构 传 动 比 得 到。优 化结果证明,多目标优化方法优于传统优化方法,有利于减小转向轮的 磨 损、改 善 车 辆 的 操 纵 稳 定 性 及 转向轻便性。
11.二 轴 摇 臂 暋12.中 间 拉 杆 暋13.中 间 摇 臂 14.一 轴 转 向 节 臂 暋15.一 轴 直 拉 杆 暋16.中 间 拉 杆
图 1暋 某 8暳4 重 卡 双 前 桥 转 向 系 统
坐 标 原 点o 取 在 一 轴 中 心 线 所 在 垂 直 平 面 、车 架 下 翼面及汽车中心线所在的垂直平面的交点。
0暋 引 言
近年来,受路面 条 件、交 通 法 规 的 限 制,重 卡 车 辆 多 设 计 成 双 前 桥 转 向 形 式 ,由 于 其 结 构 复 杂 、 车 辆 载 重 量 的 增 加 、道 路 条 件 的 多 样 性 ,使 得 转 向 轮的磨损问题异常突出。目前多数企业主要依靠 经验进行 设 计 或 借 助 于 成 熟 的 车 型 参 数 进 行 设 计 ,因 此 ,提 出 一 种 满 足 实 际 工 况 的 多 轴 转 向 系 统 设计方法是我国企业急需解决的问题。
臂架式起重机吊重水平移动的优化设计
臂架式起重机吊重水平移动的优化设计臂架式起重机是一种常见的工业设备,它可以在不稳定的地形上进行起重操作。
通常,这种起重机通常由一组伸缩臂、一个吊钩和一个支架组成,它们能够在水平和垂直方向上进行移动。
然而,许多臂架式起重机在吊重水平移动时存在一些问题,例如摇摆、不平衡等。
因此,在本文中,我们将介绍如何优化臂架式起重机的吊重水平移动设计,以提高其稳定性和安全性。
首先,我们将探讨臂架式起重机的基本结构和工作原理。
通常,起重机的支架可以进行360度旋转,并配有液压吊杆和液压缸。
伸缩臂可以伸出5-30米,可以根据所需的高度进行调整。
借助支架和液压系统的辅助,起重机可以进行重量高达数吨的吊装工作。
然而,在移动过程中,臂架式起重机往往会出现摇摆,容易导致货物倾斜或不稳定地移动。
为了解决这个问题,我们可以采取一系列措施来优化臂架式起重机的吊重水平移动设计。
第一,我们可以使用软启动技术来控制起重机的水平运动。
这种技术可以缓慢地将起重机加速到运动速度,以避免起重机突然加速或停止,并在移动过程中减小摇晃和颠簸的可能性。
第二,我们可以加强起重机的平衡性和稳定性。
为了确保起重机在吊重度假正常,其支点和吊挂点应该在同一平面上,这可以通过使用高质量的弹簧和牵引器件来实现。
另外,控制吊钩上下移动的速度也很重要,应该采用精确控制技术,以防止起重机在移动过程中出现颠簸或晃动。
第三,我们可以对起重机进行定期维护和保养。
安全绳索、吊钩、液压缸和其他关键部件都应经常检查,以确保它们保持良好的工作状态。
在操作起重机之前,应先进行基础检查,避免因疏忽而发生事故。
总之,臂架式起重机是一种广泛使用的工业设备,对于许多行业来说都是不可或缺的。
然而,在吊重水平移动时,它们也往往存在一些问题。
我们可以采取软启动技术、加强平衡性和稳定性,以及定期维护和保养的方法来优化起重机的吊重水平移动设计,提高其稳定性和安全性。
起重机伸缩吊臂截面优化设计解析

确定其它节臂的壁厚。3伸缩吊臂优化设计过程QAY125伸 缩吊臂结构特点是截面为大圆角十二边形(下盖板为11 个边),具有较好的稳定性和
抗屈曲能力,能充分发挥材料的力学性能,且使用高强 度钢材,减轻了吊臂重量,提高了整机的起重性能。另 外,吊臂上下盖板仅有2道焊缝,且布置
在侧面中线附近低应力区,焊接工艺性好,传力更可靠。 这种吊臂形状代表国内外较先进的技术。因此,在进行 优化设计时,不改变此吊臂的基本形状
它使用状态变量和目标函数对设计变量的偏导数,在每 次迭代中计算梯度确定搜索方向,因而精度较高,但占 用的时间相对较多。此外,还应注意的是
由于采用梯度法搜索,可能使得搜索结果位于局部最优 解,而不是全局最优解,故对所得结果应仔细判断。优 化时,起始序列选用现有的设计产品数据
,首先确定迭代40次,得到的优化结果不理想,主要是 吹、叫比其下限值大得较多,重量减小得较少,看来结 果出现了局部最优解。为此,细化设计
板高度进一步减小,下部趋近于圆弧。3种截面的特性数 据见表d表示的是最终确定的吊臂形状。表1QAY125基本 臂优化前后截面特性比较项目
面积优化前截面第一次优化第二次优化第三次优化3.2其 余节臂截面尺寸确定在基本臂截面尺寸优化确定后,便 可根据每节臂之间的间隙(滑块厚度
尺寸)大小用作图法定出2、玉4和5节臂的尺寸。而每节 臂的厚度则根据全伸臂时的强度、刚度及局部稳定性要 求来确定。总的原则是与现有产品的
,即仍保持吊臂为12个边。3.1基本臂截面的优化设计作 为吊臂来说,总希望在不发生局部失稳的前提下,壁厚 设计得薄一点,截面设计大一些。
但由于受整机尺寸的限制,吊臂外形尺寸不能增大,因 而只能在截面总高和总竞保持不变的条件下进行截面的 优化。而由QAY125伸缩吊臂在全缩
TJ165型架桥机机臂优化设计与检测分析

图 1 TJ 6 1 5型 架 桥 机 的 总体 结 构 示 意 图
① o号 柱 、 机 臂 、 吊轨 , 车 、 吊 梁 小 车 、 ② ③ 1 、 ④ ⑤ 1号 柱 、 2号 、 三 号 柱 、 车 体 。 ⑥ ⑦ ⑧
为 制 造 出 安 全 性 能 好 , 业 效 率 高 的 架 桥 机 , 们 对 架 作 我 机 臂 为 变 厚 度 盖板 钢 箱 梁 ( 4 , 架 桥 机 的 主 要 承 载 图 )是 桥 机 各 主 要 承 载 结 构 进 行 了 优 化 设 计 , 对 样 机 进 行 了 试 并 构件, 长 4 总 9米 , 面 尺 寸 为 高 ×宽 一 1 3 断 . 8米 × 12 . 2米 , 带 验 检 测 , 一 步 验 证 架 桥 机 的 安 全 性 能 。 由 于 架 桥 机 的 承 进 上 下 耳 梁 和 行 车 轨 道 。 上 耳 梁 作 为 龙 门 柱 对 机 臂 的 支 托 点 载 构 件 很 多 , 文 仅 对 机 臂 的 结 构 优 化 设 计 和 试 验 检 测 作 本
了 计 算 出各 局 部 的 受 力 情 况 , 臂 采 用 ANS 机 YS单 元 库 中 的 S I 6 HE 3壳 单 元 建 立 模 型 , 结 构 的 连 接 、 束 与 载 荷 进 L 对 约 行 合 理 的处 理 , 算 出 各 工 况 下 危 险 截 面 的 应 力 和 变形 。 计
出分析 。 兼 轨 道 , 耳 梁 作 为 吊 梁 小 车 对 机 臂 的 扣 压 点 兼 轨 道 。 为 下
3 机 臂 优 化 设 计
2 TJ 6 1 5型 架 桥 机 作 业 工 况
T l 5型 架 桥 机 主 要 有 以 下 三 种 作 业 工 况 : J6 ( ) 臂 状 态 : 是 架 桥 机 桥 墩 对 位 作 业 工 况 , 臂 处 1悬 这 机 3 1 机 臂 全 悬 工 况 . 于全悬臂 状态 。( 2) 图 a 全悬状 态的载 荷工 况 包括 : 号柱 重 量 6, 机重 3, 零 t电 t ( ) 点 吊 梁 状 态 : 是 架 桥 机 出 粱 的 作 业 , 臂 处 于 2单 这 机 吊 轨 小 车 重 5 2 , 梁 小 车 重 2 t机 臂 自 重 由 程 序 单 元 自 .t吊 5, 简 支 受 单 点集 中载 荷 状 态 。 ( 2 ) 图 b 动 计 入 。此 时 边 界 支 撑 情 况 为 一 号 柱 支 撑 机 臂 , 号 柱 压 二 ( ) 点 吊梁 及 横 移 梁 状 态 : 是 架 桥 机 落 梁 和 移 梁 作 3双 这 住 机 臂 , 号 柱 悬 空 。机 臂 全 悬 工 况 下 局 部 等 效 应 力 图 如 零 业 , 臂处 于 简 支受 双 点 集 中偏 移 载荷 状 态 。( 2 机 图 c和 图 图 5所 示 , 大 主 应 力 位 于 1号 柱 支 撑 位 置 , 大 等 效 应 力 最 最 3) S QV一 1 7 1 a E 8 . MP 。竖 直 方 向 变 形 计 算 结 果 如 图 6所 示 , 零 号柱端下 挠度 52 6 7 . mm 。
160t铁路救援起重机伸缩式吊臂有限元分析及优化

曾宪渊 张仲 鹏 阳 燕 曾宪仕 成都 6 0 3 10 1 西 南交通 大 学机 械 工程 学 院
摘
要 :吊臂 作 为起 ຫໍສະໝຸດ 机 的 起 吊支 撑 重 要 构 件 ,其 设 计 是 否 合 理 ,直 接 影 响起 重 机 的 承 载 能 力 、整 机 稳 定
w een wt h epo nt ee n ot r h ri i teh l ff i lme tsf eANS 0 0, teca eam sa aye n ac ltda d o eb sso h i e wa YS1 . h rn r i n z da d cluae n t ai f l n h
s c n y i a d c c lt n i i f rh ro t z d s h ti c n me tt e r q ie n sfr me h n c rp r e . u h a a ss n a ua i t s u t e p i e o t a t a e h e u r me t c a i a p o e is l l o mi o l t
性和整机 自重 。纵 观国内外 流动式起 重机 吊臂设计 ,大多数采 用 的截面形式 是多边 形截 面。通过对 截面形 式 的
改进 ,采 用 了椭 圆形 截 面 吊臂 设 计 。 通过 有 限 元 软 件 A S S 0 0 N Y 1 . ,对 10 t 路 救 援 起 重 机 吊臂 进 行 分 析 计 算 。 6 铁 并 且 在 此 基 础 上 对 该 伸 缩 式 吊臂 进行 了 优 化 ,使 吊臂 力 学 性 能 满 足 要 求 。
1 铁 路 救 援起 重 机伸 缩 式 吊臂 的 整 体 结 构
汽车起重机吊臂优化设计及性能分析

(2)
© 1995-2005 Tsinghua Tongfang Optical Disc Co., Ltd. All rights reserved.
11 4 农业工程学报 1996年
式中 x 1, x 2, x 3, x 4, x 5 ——吊臂截面长、宽、高、上下盖板及侧板厚度 (见图1) ; n —— 吊臂 节数。
3 吊臂优化设计
吊臂下盖板失稳原因是结构截面尺寸不合理, 因此, 要对吊臂进行优化设计。
3. 1 数学模型
3. 1. 1 目标函数
衡量截面参数的重要指标是其自身的质量, 以吊臂质量为目标函数, 有
n
n
∑ ∑ F (X ) = W i (X ) = Θ0 A i (X ) li
(1)
i= 1
i= 1
式中 W i (X ) ——第 i 节臂的可变质量; A i (X ) ——第 i 节臂的轴向截面面积; li ——第
第12卷 第3期 农 业 工 程 学 报 V o l. 12 N o. 3 1996年 9月 T ran saction s of the CSA E Sep t. 1996
汽车起重机吊臂优化设计及性能分析α α α
i 节臂的长度; n ——伸缩臂的节数; Θ0 ——材料的密度。
3. 1. 2 设计变量
根据使用要求及所选材料, 式 (1) 中 Θ0及 li 即可确定, 可变参数为各节臂的截面面积,
当截面结构选为矩形断面箱形结构时, 设计变量为
X = (x 1i x 2i … x 5i) ( i = 1, 2, …, n)
(7)
3. 2 优化设计程序实现
这里选用了复合形法[5]进行优化计算, 主要进行各种性能约束函数计算, 本文针对箱
TJ165型架桥机机臂优化设计与检测分析
TJ165型架桥机机臂优化设计与检测分析阐述了利用数字仿真技术,优化架桥机的机臂设计,并通过架桥机试验实测数据与计算数据的比较分析,证明架桥机的设计是合理的,安全性能是可靠的。
标签:架桥机;机臂;优化设计;检测分析1 前言目前,我国铁路新线建设多为时速200公里客货共线铁路,其铁路桥梁采用2201型砼梁,架设重量为165吨。
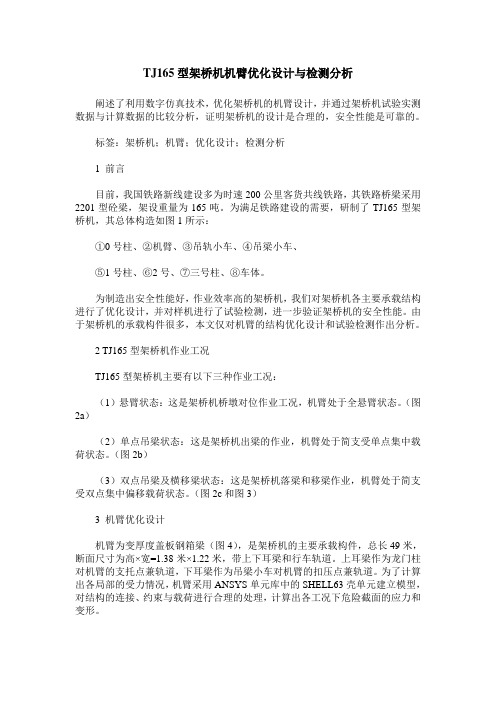
为满足铁路建设的需要,研制了TJ165型架桥机,其总体构造如图1所示:①0号柱、②机臂、③吊轨小车、④吊梁小车、⑤1号柱、⑥2号、⑦三号柱、⑧车体。
为制造出安全性能好,作业效率高的架桥机,我们对架桥机各主要承载结构进行了优化设计,并对样机进行了试验检测,进一步验证架桥机的安全性能。
由于架桥机的承载构件很多,本文仅对机臂的结构优化设计和试验检测作出分析。
2 TJ165型架桥机作业工况TJ165型架桥机主要有以下三种作业工况:(1)悬臂状态:这是架桥机桥墩对位作业工况,机臂处于全悬臂状态。
(图2a)(2)单点吊梁状态:这是架桥机出梁的作业,机臂处于简支受单点集中载荷状态。
(图2b)(3)双点吊梁及横移梁状态:这是架桥机落梁和移梁作业,机臂处于简支受双点集中偏移载荷状态。
(图2c和图3)3 机臂优化设计机臂为变厚度盖板钢箱梁(图4),是架桥机的主要承载构件,总长49米,断面尺寸为高×宽=1.38米×1.22米,带上下耳梁和行车轨道。
上耳梁作为龙门柱对机臂的支托点兼轨道,下耳梁作为吊梁小车对机臂的扣压点兼轨道。
为了计算出各局部的受力情况,机臂采用ANSYS单元库中的SHELL63壳单元建立模型,对结构的连接、约束与载荷进行合理的处理,计算出各工况下危险截面的应力和变形。
3.1 机臂全悬工况全悬状态的载荷工况包括:零号柱重量6t,电机重3t,吊轨小车重5.2t,吊梁小车重25t,机臂自重由程序单元自动计入。
此时边界支撑情况为一号柱支撑机臂,二号柱压住机臂,零号柱悬空。
基于Ansys的超大型平头塔式起重机平衡臂优化设计

Op t i mu m D e s i g n o f C o u n t e r - j i b f o r S u p e r L a r g e F l a t — t o p
a n d p a r a me t r i c t e c h n i q u e i n A n s y s a r e u s e d t o p a r a me t e r i z e t h e d e s i g n d i me n s i o n s o f t h e c o u n t e r - j i b s t r u c t u r e . Th r o u g h t h e
s h o w t h a t t h e o v e r a l l s t r e n g t h a n d r i g i d i t y o f t h e c o u n t e r - j i b me e t t h e d e s i g n r e q u i r e me n t s , a n d t h e p a r a me t r i c d e s i g n c a n i m—
p r o v e t h e d e s i g n q u a l i t y o f t h e c o n s t r u c t i o n ma c h i n e r y .
Ke y w o r d s : s u p e r l a r g e f l a t - t o p t o we r c r a n e , c o u n t e r - j i b , o p t i mi z e d d e s i g n , f i n i t e e l e me n t
转向摆臂拓扑优化设计

-10 0 10 内转向轮转角
20
30
40
50
80 -50
-40
-30
-20
-10 0 10 内转向轮转角
20Biblioteka 304050(a)
(b)
图 11 推力(a)和拉力(b)作用下的转向摆臂最大应力对比分析
642
第五届中国 CAE 工程分析技术年会论文集
如图 11 所示,在转向油缸推力和拉力作用下的最大应力对比。可知,拓扑优化结果要优 于无优化和非拓扑优化结果
图7
施加载荷约束后的转向摆臂
求解分为两部分, 一部分是对转向摆臂进行应力分析和变形分析,另一部分为拓扑优化求 解。拓扑优化求解时需对去除材料的比例 Target Reduction 选项进行设置,由于转向摆臂受力 的大小和方向是变化的, 在不同角度工况下有不同的力的传递路径。 因此, 对 Target Reduction 的设置要十分谨慎,本文设置为 20%。 求解后得到零件建议被保留的区域,如图 8 所示。根据所建议的结构在 CAD 软件中重新 建模。建模时应去除由于有限单元所形成的不规整边缘,还需考虑到零件的加工工艺性,方 便加工制造[5]。图 8 中的优化结果并不能作为最终的优化结果,还需对其他转向角度进行拓扑 优化分析,综合所有的拓扑优化结果,决定最终要去除的部分。
式中, s 为道路和轮胎之间的摩擦系数;
B 为轮胎宽度; e 转向节立轴的偏移量; Gs 为转向桥的负荷,为
h a Gs Gmax ( cos g sin ) L L
式中,L 为轴距,mm;
式(2)
Gmin 为空车自重,ton; Gmax 为满载总重,ton; G 有效载荷,ton;
-10 0 10 内转向轮转角
桥式起重机结构优化与轻量化设计

桥式起重机结构优化与轻量化设计导言随着我国装备制造业的发展,起重机械作为现代工业中的“大力士”,在冶金、物流等国家重要的工业行业被大量使用,在国家装备制造中发挥着举足轻重的作用。
这其中桥式起重机是最为常用的一种起重设备,被广泛的安装在大型的厂房内,我国的桥式起重机设计虽然起步较晚,但这些年我国的起重机设计在新材料、新技术、新方法的不断涌现下正步入高速发展的快车道,桥式起重机的结构得到充分优化,并逐步呈现出小型化、轻量化和智能化的发展趋势,本将主要就桥式起重机结构优化和轻量化设计展开论述。
有关桥式起重机设计所需的技术和方法1.桥式起重机的模块化设计自从模块化设计在世纪初的德国被提出后,被各种行业借鉴,同样也在桥式起重机设计的到应用。
桥式起重机的模块化设计就是将复杂的桥式起重机分解为易于通用互换的部件或模块,最大限度的满足用户的和市场的需求,同时又由于模块的相对独立性使的设计更加简洁大大节省设计费用,又由于部件或模块的可互换性大大节省了零部件的生产,最终节省了生产成本。
起重机行业的龙头德马格公司将模块化设计方法用到单梁吊车的设计中,使单梁吊车的设计费用比原先降低了生产成本为原先70%。
桥式起重机的模块化设计是将桥式起重机按照功能分为:控制模块、起升模块、运行模块、吊钩滑轮模块、桥架模块和小车架模块等六个模块。
控制模块主要包括起重机的控制设备和控制软件。
起升模块包括起升电动机、减速器、起升制动器和钢丝绳卷筒组;运行模块包括走行车轮组、走行制动器、电动机、减速器和缓冲器;吊钩滑轮模块包括吊钩、横梁、滑轮组和安全模块;桥架模块包括主梁、端梁和附属结构。
2.结构优化法结构优化法就是通过对工程对象按结构进行细分形成变量并优化,实现对工程对象目标化设计。
结构优化法按照优化变量的种类分为三种:拓扑优化、形状优化和尺寸优化。
(1)拓扑优化一般在设计的概念设计阶段,主要是对起重机的原理和技术的进行全新的优化。
(2)形状优化一般发生在起重机的基础设计阶段,主要是按照客户或市场的需要进行起重机的总体、设备的选型、材料成本的设计。
浅论起重机臂架参数化优化设计

浅论起重机臂架参数化优化设计臂架是履带起重机的重要构件,起承载作用。
臂架的自重、强度等对起重机整体性能有着直接影响,而且在起重机中臂架占据着较大比重,影响着起重机提高能力和减轻自重。
由此可见,对臂架的进行参数化分析和优化设计尤为重要。
粒子群算法是一种群智能优化算法,通过对鸟群觅食模拟,模拟由简单个体组成的群落与环境、个体之间的互动行为,属于全局随机搜索算法。
该算法结构简单,便于计算,需要设置参数较少,但是该算法容易出现局部最优。
通过对算法的研究发现,模拟退火算法能够有效解决上述问题。
因此,在本次优化设计中,首先采用粒子群算法,用模拟退火算法对可能陷入局部最优的部分进行扰动。
一、参数化建模1、受力分析履带起重机臂架为通用型起重机,其结构为四弦杆桁架式,在变幅平面内选择滑轮组以两端简支中心受压构件进行计算。
在回转平面内根据臂根固定、臂端自由承受纵横弯曲作用构件进行计算。
图1 臂架变幅平面受力图图1 中Q代表吊重量;代表拉板力;代表起升绳力;代表臂架自重;和分别代表起升冲击系数和起升载荷动载系数。
与的关系为:该式中、分别代表滑轮组倍率和效率。
根据图1,以B铰点取矩,对拉板力的计算如下:该式中代表的是臂架的重心比,为了简化程序,取值为0.5。
在危险截面下臂架轴向力为臂架自重、变幅拉索力、起升单绳拉力和起升载合力,得出下列公式:其中是臂架质量(危险截面上方)。
在变幅和回转两个平面对单臂架载荷组根据物品惯性力、偏摆力以及风力组合。
图2 臂架回转平面受力图图2为回转平面,在此平面内货物偏摆、臂重风载以及惯性载荷形成侧向集中力:该式中代表的是风载影响下货物形成的侧向力,取为,通常情况下取值在3~6°之间;代表的是由制动惯性力和旋转的机构起动形成的侧向力,为了便于计算,在这里取额定起重量的10%;为风载,一般情况下,取40% 作为集中力作用于臂端。
2、目标函数的建立研究对象为通用型履带起重机臂架,目标函数设定依据臂架最轻质量,约束条件为其稳定性、刚度以及强度,以此建立数学模型如下:2.1目标函数min为杆件体积;为钢材密度,为7.85 ;为各几何的尺寸大小。
吊车吊臂的优化设计

c(1)=-x(1)*x(2)^2+(x(1)-2*x(3))*(x(2)-2*x(3))^2+0.02055; c(2)=-x(2)*x(1)^3-(x(2)-2*x(3))*(x(1)-2*x(3))^3+0.2662; c(3)=-x(1)+x(3); c(4)=-x(2)+x(3); c(5)=-x(3)+0.1; ceq=[]; clear; clc; x0=[0.7,0.8,0.15]; %x的预设初始值 lb=[0,0,0.1]; %x的下界值 ub=[1,1,1]; %x的上界值 options=optimset('largescale','off', 'algorithm','active-set', 'tolfun',1e-5); %关闭大规模方式,调用’active-set'算法,设置目标函数精度值 [x,fval]=fmincon(@myfun,x0,[],[],[],[],lb,ub,@mycon,options)
<stopping criteria details> lower 3 upper
Active inequalities (to within options.TolCon = 1e-006): ineqlin ineqnonlin 5 2
x = 0.8704 0.3398 0.1000
fval = 0.2020
while rm<recm %迭代次数是否小于最大迭代次数 j=0; y0=2*x03*(x01+x02)-4*x03*x03; dir0=rand(3,1);
dir0(1)=dir0(1)-0.5; dir0(2)=dir0(2)-0.5; dir0(3)=dir0(3)-0.5; x11=x01+dir0(1)*a; x12=x02+dir0(2)*a; x13=x03+dir0(3)*a; y1=2*x13*(x11+x12)-4*x13*x13; test=abs(y1-y0); yue1=-x11*x12^2+(x11-2*x13)*(x12-2*x13)^2+0.02055; yue2=-x12*x11^3-(x12-2*x13)*(x11-2*x13)^3+0.2662; yue3=-x11+x13; yue4=-x12+x13; yue5=-x13+0.1; %设定约束条件
臂架式起重机吊重水平移动的优化设计

臂架式起重机吊重水平移动的优化设计臂架式起重机作为一种常见的起重设备,在工业生产和施工现场都有广泛的应用。
与传统的塔吊相比,臂架式起重机具有灵活方便、占地面积小等优势。
然而,在实际使用中,臂架式起重机的吊重水平移动存在一些问题,需要进行优化设计。
一、问题分析臂架式起重机的吊重水平移动主要依靠臂架的伸缩和平移机构。
然而,在实际使用中,这一机构往往存在一些不足之处:1、伸缩机构设计不合理。
部分臂架式起重机伸缩机构的设计过于简单,无法经受长期的高负荷使用,导致机构失灵。
2、平移机构不够灵活。
目前市场上的部分臂架式起重机平移机构结构较为简单,只能实现直线运动,无法满足复杂工况下的需求。
3、操纵系统响应速度慢。
部分臂架式起重机操纵系统响应速度慢,影响了吊重效率和安全性。
二、优化设计方案针对以上问题,可以采用以下优化设计方案:1、伸缩机构升级。
将现有的伸缩机构升级换代,采用高强度材料和先进的运动控制技术,确保机构在高负荷条件下的可靠性和耐用性。
2、平移机构改进。
采用多轴平移机构,结合传感器和控制器实现机构在平面内的任意位置和方向移动,提高起重机的灵活性和适用性。
3、操纵系统升级。
采用高速响应的液压或电气系统,实现操纵手柄操作时系统的即时响应,提高吊重效率和安全性。
三、应用效果经过优化设计后的臂架式起重机具有以下优点:1、吊重水平移动更加灵活。
采用多轴平移机构,可以实现机构在平面内的任意位置和方向移动,适用于复杂工况下的需求。
2、机构运动更加稳定。
采用高强度材料和先进的运动控制技术,确保机构在高负荷条件下的可靠性和耐用性,降低了机构失灵的风险。
3、操纵系统更加响应迅速。
采用高速响应的液压或电气系统,实现操纵手柄操作时系统的即时响应,提高吊重效率和安全性,减少了操纵误操作的可能性。
四、总结臂架式起重机的吊重水平移动优化设计,需要考虑几个方面的问题。
在设计伸缩和平移机构时,要采用高强度材料和先进的运动控制技术,确保机构在高负荷条件下的可靠性和耐用性;在设计操纵系统时,要采用高速响应的液压或电气系统,实现操纵手柄操作时系统的即时响应。
吊车吊臂结构尺寸优化设计

结构 进行 优化 设计 。
1 尺 寸 优 化 基 础
1 . 1 数 学模 型
肘 ( ) +∑心 ( — o r o ) + A ( A 。 一 A 。 )( 2 )
式中: , ( =1 , 2 , …, m) 和 以 为应 力 和 一 阶屈 曲
因子 约束 的 L a g r a n g e 乘子。
表达 式 。
第一作者 : 付世欣( 1 9 8 6 一) , 男, 硕士 , 工程师
研究方 向: 结构轻量化设计
1 0 6
2 01 7拄
第1 期
付世欣 , 等: 吊车 吊臂结构尺寸优化设计
船海工程 第4 6卷
应 力 约束 函数 关 于 设 计 变 量 t 的灵 敏 度 求 解 过程 如 下 :
得 到普遍 应用 , 其 中在 海洋 工程 装备 领域 , 研究 多
集 中于平 台结 构 的 强 度 特性 提 高 , 而船 用 吊车 方
面 的轻量 化研 究则 较少 。船 用 吊车 系统 主要 面 临 的问题是 在保 证 作 业 性 能 的 同时 完 成 结 构 轻 量 化 。考虑 采用 尺 寸 优 化 方 法 , 对 船 用 吊车 吊臂 的
A o—A ≤ 0 ; 设 计 约束 : t ∈ { , , …, }
( 1 )
( i= 1 , 2, …, Ⅳ)
产 品开发 的概 念设 计 和基 本 设 计 阶段 , 而 尺 寸 优
化则 是产 品详 细设 计 阶段 的成 熟方 法 。在汽 车领
式 中: T=( t , t , …, t ) 为 设 计 变 量 矩 阵 , 在 本
中 图分 类 号 : U 6 6 4 . 4 文献标志码 : A 文章编号 : 1 6 7 1 — 7 9 5 3 ( 2 0 1 7 ) 0 1 - 0 1 0 6 - 0 4
关于桥式起重机主梁的优化设计的研究

关于桥式起重机主梁的优化设计的研究前言桥式起重机主梁作为承载和传递货物重量的核心部件,它的设计质量直接关系到起重机的使用效果及其安全性。
通过对桥式起重机主梁的优化设计的研究,可以提高起重机的承载能力、减少结构重量、提高使用寿命等,具有重要的研究和应用价值。
本文将介绍如何进行桥式起重机主梁的优化设计,主要包括优化设计的原理、步骤以及应注意的问题等。
优化设计的原理桥式起重机主梁的优化设计也是一种多目标优化问题,通常包括起重机主梁的承载能力、结构重量以及使用寿命等多个指标。
优化设计的原理是在保证起重机主梁承载能力、结构强度和使用寿命基本要求的前提下,尽可能减少结构重量。
在进行优化设计时,需要根据起重机主梁的实际工作环境、重量和使用要求等因素,设计出满足这些条件的最优方案。
通过模拟分析、计算、试验等多种手段,不断地对设计方案进行修改和调整,最终得到满足需求的可行设计。
优化设计的步骤桥式起重机主梁的优化设计需要经过以下步骤:1. 确定设计需求和目标在进行优化设计之前,需要明确主梁的使用环境、工作负荷和使用寿命等需求和目标。
在此基础上,确定主梁的最大承载能力、结构强度和使用寿命等设计要求。
2. 优化设计方案的策略选择针对得到的设计要求,选取相应的设计策略,进行优化设计的方案选择。
一般来说,桥式起重机主梁的优化设计方案包括采用常规钢/材料、采用异型钢/材料、进行结构优化等多种方案。
在确定优化设计方案时,需要进行分析比较,选择最佳方案。
3. 优化设计方案的计算模拟选定优化设计方案后,需要进行计算模拟。
常用的计算模拟方法包括有限元分析(FEA)、计算机辅助设计(CAD)和计算机辅助工程(CAE)等方法。
在模拟分析中,需要考虑起重机主梁的受力行为和变形特征等问题,同时对整个起重机主梁结构进行材料力学分析,分析各部位内力分布、应力变化和变形情况等,对设计方案进行优化调整。
4. 优化设计方案的试验验证完成计算模拟后,需要对设计方案进行验算和试验验证。
重型支援桥吊机上摆臂优化设计

图 7 最不利荷载位置时 3阶模态对比
图 2 最不利荷载位置的静位移及应力云图
由表 1可知, 3 种情 况下 所产生 的最 大静位 移与 最大 应力均 相 差 不 大, 两 者 最 大 值 与 最 小 值 之 间 分 别 相 差 5. 88% 和 7. 40% , 表明吊机运行过程中上摆臂受 力均匀。
图 3 优化后的应力云图和单元 密度云图
法主要有均匀 化方 法、变密 度方 法和 渐进 结构 优化 法 [ 7] 。 均匀化方法的基 本思 想是 在组 成结 构的 材料 中引 入微 结 构单胞, 材料的弹性性质和密 度等宏观 特性都 由微结 构单 胞的形式和尺 寸参 数来 决定 [ 8] 。变 密度 法主 要采 用简 单 的能量原理, 并在公式中假设 杨氏模量 为变量 进而获 得最 佳材料分布, 其数值的不稳定 性和计算 的复杂 性是该 方法 在结构优化应 用 中的 主要 困难。均 匀化 方法 和变 密度 方 法等的主要特点 是将 拓扑 变量 取为 单元 几何 尺寸 或材 料 物理参数等连续变量, 并通过 单元几何 尺寸或 材料物 理参 数等取下限值, 实现结构拓 扑变更。渐 进结构 优化法 通过 将无效的或低 效的 材料 一步 步去 掉, 获得 优化 拓扑, 方 法 通用性好。
H yperw orks是美国 A lta ir公 司推出的 通用有限元 分析 与优化软件, 它构 建于 设计 优化、性 能数 据管 理和 流程 自 动化的基础理 念之 上, 集成 了设 计与 分析 所需 的工 具, 包 括建模、分析、可 视 化 和数 据 管理 解 决 方案, 能 够用 于 线 性、非线性、结构优化、流固耦 合和多刚 体动力 学等多 个方 面, 具有良好的开放性、灵活性和友 好的用户界 面。 O ptiSt ruct是其中的一个模块, 除了能够完成结构优 化分析之 外, 也能胜任诸如静态、动态、热学等一般性分 析任务。
重型清障车吊臂结构设计与优化
为此 , 要拟定最优 的运动方案 、 选择受力合理的吊臂截面形状 、 采 用高强度 的钢材 , 同时要考虑制造 的工艺性 。
及故障车辆 , 确保交通畅通。 外, 此 它也能对 中、 轻型车辆 实施各 种清障作业 。吊臂是重型清 障车的重要工作装置 , 负责将发生侧
翻车辆 扶 正 或将 翻到 沟里 的 车辆 吊到 路 面上 , 以便 于拖 牵 。
;语 言( P L 对 滑块的结构尺 寸进 行参数化 建模 与 求解。 到 了滑块 两个几 何尺 寸单独 变化 和联合 变化 AD) 得 ; 时对应 的应 力变化 曲线 , 找到 了如何通过增 大滑块尺寸来减 少吊臂接 触部位 应力的最有效 办法。 关键词 : 重型清 障车 ; 吊臂 ; 设计 ; 优化 ; N Y A S S
有在 线修 改功 能 , 系统设 计 、 、 和维 护等 方面 均表 现 了明 在 安装 调试
显 的优越性 。
1 D v G ono . rga mal ot lr r at yA t tnf . 3 ai Jh sn Porm beC nr l sf c0 u0 i D] J d oe o F r ma o
( 3 — 0 6)9 4 .
实现块煤的连续滑动入仓 , 减少块煤破碎 ;2仓外旁路装车溜槽的 () 设计增加了块煤的储煤量, 自动装车 ;3变角皮带液压升降系 实现 () 统, 以实现仓外防破碎堆存 ; ) ( 采用先进的 P C模块 和雷达式料 4 L 位计 , 实现 自动控制 , 控制精度高 、 可靠性强 , 由于 P C程序具 而且 L
中图分 类号 :H1 , 4 96 9 文献 标识 码 : T 6 U 6 .+ 2 A
1 引言
重型清障车是一种多功能 、 大吨位 的公路救援清障设备 , 能
重型汽车双摇臂机构优化方法研究

重型汽车双摇臂机构优化方法研究
高中新
【期刊名称】《机械工程与自动化》
【年(卷),期】2011(000)006
【摘要】针对目前重型汽车双摇臂机构存在转向误差较大的问题,构建局部坐标系和空间几何模型,建立了前两桥左轮的转角关系,并提出采用二分法确定最优变量参数,从而使双摇臂机构转向性能提高.通过实验证明了该优化方法的合理性和有效性.【总页数】3页(P79-81)
【作者】高中新
【作者单位】河南中烟工业有限责任公司新郑卷烟厂,河南新郑 451150
【正文语种】中文
【中图分类】U463.46
【相关文献】
1.基于ADAMS的双前桥重型汽车双摇臂设计及优化 [J], 李庆欢;张代胜;吕召全
2.重型汽车转向双摇臂机构的优化设计 [J], 肖悦;张代胜;周福庚;吕召全;梁林
3.双前桥转向机构优化设计方法研究 [J], 王阳阳;靳晓雄;张代胜
4.重型汽车转向梯形机构优化设计 [J], 常成;董小瑞;郭晶帆;赵鑫
5.双前轴转向汽车的摇臂机构优化设计 [J], 崔军华
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
表 4 结构优化前后对照
最大静位移 /mm 最大应力 /M P a
质量 /kg
优化前
27. 21 725. 00 220. 32
优化后 变 化量 /%
24. 06 717. 10 202. 93
11. 58 1. 09 7. 89
最大应力 减小的 原因 是 上摆 臂总 质量 的减 小导 致自 身重力的减小, 即总的外荷 载减小 了。最大 应力点由 焊缝 转移到面板显然对结构的 受力更 加有利, 因 为焊缝的 质量 由于多种因素的影响 有时可能得不到可靠的保证。
根据有 限元分析的 结果可知, 上摆 臂的面板、腹板、肋 板及加强板均有较大面积 的小应 力区域, 从受 力情况 方面 分析有较大的减重空间。 为了减 轻上摆 臂自重, 使结 构形 式更趋合理, 利用 H yperw orks软件提供 了结构 拓扑优 化功 能对上摆 臂 进 行结 构 优化 设 计。优 化 的对 象 为 面 板、腹 板、肋板及加强 板, 不对 吊轴 筒进 行优 化。优 化目 标为 体 积最小, 约束条件为最大静位 移不大于 优化前 的最大 静位 移。优化后的应力 和单元 密度 云图见 图 3, 优化 前后 最大 静位移与最大应力结果对比见表 2。
法主要有均匀 化方 法、变密 度方 法和 渐进 结构 优化 法 [ 7] 。 均匀化方法的基 本思 想是 在组 成结 构的 材料 中引 入微 结 构单胞, 材料的弹性性质和密 度等宏观 特性都 由微结 构单 胞的形式和尺 寸参 数来 决定 [ 8] 。变 密度 法主 要采 用简 单 的能量原理, 并在公式中假设 杨氏模量 为变量 进而获 得最 佳材料分布, 其数值的不稳定 性和计算 的复杂 性是该 方法 在结构优化应 用 中的 主要 困难。均 匀化 方法 和变 密度 方 法等的主要特点 是将 拓扑 变量 取为 单元 几何 尺寸 或材 料 物理参数等连续变量, 并通过 单元几何 尺寸或 材料物 理参 数等取下限值, 实现结构拓 扑变更。渐 进结构 优化法 通过 将无效的或低 效的 材料 一步 步去 掉, 获得 优化 拓扑, 方 法 通用性好。
本文中利用 Inventor建 立了 吊机 上摆 臂 实体 模型, 通 过 标准交 换文 件导入 Hyperw orks软 件进 行了有 限元 分析 及拓扑优化设 计, 并与 试验 结果 进行 了对 比 分析, 提 出较 为合理优化结果 [ 2]。
1 有限元分析及拓扑优化
有限元方法作为一种 非常有 效的数 值方法, 已为 工程 界所普遍接受和广泛使用 [ 3], 在机 械制造、材料 加工、航空 航天、汽车、土木建筑、电子电 器、国 防军工、船舶、铁道、石 化、能源、科学研 究等 各个 领 域为 解决 复杂 的工 程分 析计 算问题提供了有 效途径 [ 4- 5] 。在工 程实践 中, 有 限元 分析 软件与 CAD 系统的集成应用使研究、设计水平发生了质的 飞跃。
模态是机械结构的固 有振动 特性, 每一个 模态具 有特 定的固有频率、阻尼比和模 态振型。模 态分析 是结构 动态 设计及设备故障诊断的重 要方法, 最终 目标在 是识别 出系 统的模态参数, 为 结构 系统 的振 动特 性分 析、振动 故障 诊 断和预报以及结构动力特性的优 化设计提供依据。
上摆臂作为吊机的 一个组 成部分, 其模 态不仅与 自身 的结构形式、材料及空间姿态有关, 还跟与其相连的下摆臂、 连杆组、油缸等的 特性以 及约束 形式有 关。吊 机在某 一平 衡位置时, 在下摆臂、连杆组及油缸的共同作用下, 上下摆臂 连接孔及上摆 臂与连杆 轴连接 孔的线 位移均 被固定, 约束 形式简化为在连杆轴孔 处的 2个转 动铰。利用 H yperw orks 软件提供的结构模态分析 模块分别对优化前 后的上摆臂进 行模态对比分析 (振型见图 5~ 7, 频率见表 5)。
第 31卷 第 5期 制造技术 !
四川兵工学报
ቤተ መጻሕፍቲ ባይዱ
2010年 5月
重型支援桥吊机上摆臂优化设计
卞士川1, 张银龙1, 梁 川 2
( 1. 总装工程兵 科研二所, 北京 100036; 2. 总装工程兵科研一所, 江苏 无锡 214035)
摘要: 应用 Inventor建立吊机的虚拟样机模型, 利用 H yperw orks对吊机上摆臂进行拓扑优化设计, 在保证功能性、 安全性的基础上 使上摆臂明显减重。与试验结果的对比分析表明, 优化结果可 为吊机的整体优化提供参考。
表 2 优化前后结果对照
最大静位移 /mm
优化前 27. 21
优化后 变化量 /%
27. 33
0. 44
荷载作用点位移 /mm - 25. 238 - 25. 206
最大应力 /M P a
725. 0
728. 1
0. 13 0. 43
由图 3可以看出, 在结构上, 面板、腹板、肋板及加强板 均有减重空间, 为达到减轻结 构自重, 增 加材料利 用率, 分 别对面板、腹板、肋 板、端 部加 强 板、面 板加 强 板 进行 ∀ 打 孔 #设计 (见图 4), 根据上 摆臂密 封条件 的要求, 对于 挖空 部分均以 1 mm 厚钢板进行铆固封盖。
表 3 上摆臂结构 优化前后质量对比
kg
左腹板 右腹板 腹板加强板 腹板加强板 吊轴筒 吊轴 吊轴 加强肋板 前端加强板 前端加强板 面板 面板加强板 优化部分合 计 总质量 密封钢板质 量 实际减重
优化前 26. 316 26. 316 3. 532 3. 532 38. 977 11. 195 11. 195 16. 065 2. 064 2. 064 75. 549 3. 513 99. 255
收稿日期: 2010- 03- 02 作者简介: 卞士川 ( 1970 ), 男, 硕士, 工程师, 主要从事装备论证研究。
66
四川兵工学报
钢, 弹性模量为 2. 0E5, 泊松比取为 0. 3, 密度为 7. 85E- 9。
表 1 各种工况下位移、应力对照
工况
最不利荷 载位置
起始 位置
结束 位置
目前, 有限元分析软件大多已经实现了与 CAD 软件的 无缝集成, 具有了 更为 强大 的网 格处 理能 力, 由 单一 的求 解线性问题发展到求解非 线性问 题, 由单一 的结构场 求解 发展到耦合场问题的求解, 具 有更为 直观的 可视化前 处理 和后处理功能, 更为人性化。
拓扑优化 通 俗一 点 解释 就 是通 过 在 产品 结 构上 ∀ 打 孔 #来实现给定 的优化 目标 [ 6] 。目 前, 拓扑 优化 分析 所支 持的目标函数 主要包 括结 构强度 最大、结 构变 形最 小 (通 常用应变能表示 )、结构中某一 关键部位 的应力 集中最 小、 结构频率响 应最 高等。连 续 体结 构拓 扑优 化较 成熟 的方
220. 320
优化后 26. 316 26. 316 3. 532 3. 532 38. 977 11. 195 11. 195 11. 592 1. 612 1. 612 59. 176 2. 432 76. 424 197. 490
减轻质量 0 0 0 0 0 0 0
4. 473 0. 452 0. 452 16. 370 1. 081 22. 830 22. 830 5. 437 17. 393
上摆臂的外荷载 即一个 桥跨重 量, 方 向竖直 向下。计 算 时将 外 荷载 简化 相 等大 小的 集 中力, 作 用 于吊 筒 的中 心处。
分别对上摆 臂最 不利 荷载 位置 及起 始位 置和 结 束位 置进行仿真计 算, 得到相 应的 位移云 图和 应力 云图 ( 见图 2)。 3种工 况 下 上 摆 臂 最 大 静 位 移 与 最 大 应 力 比 较 见 表 1。
最大静位移 /mm
27. 21
27. 05
25. 61
最大应力 /M Pa
725. 0
719. 2
671. 4
3 上摆臂结构优化分析
图 1 网格划 分及零件焊接
上摆臂处 于某 一平 衡位 置时, 在 上摆 臂 油缸、连 杆组 及下摆臂的共 同作 用下, 其 线位 移均 被固 定, 在 不考 虑荷 载偏心及横向外荷 载如风 力等的 影响 下, 绕 x 和 z轴 的转 动角位移也被固定, 此时只有一个绕 y轴的 转动角位移, 上 摆臂与连杆组、上摆臂与下摆 臂的连 接简化 为绕相应 轴转 动的约束。
关键词: 重型支援桥; 吊机 ; 上摆臂; 拓扑优化; Inventor; H yperworks
中图分类号: T J812
文献标识码: A
文章编号: 1006- 0707( 2010) 05- 0065- 04
装备总质量控制是装备设计 的重要环节。一般的机械 和结构零件在 完成初 步设计 后虽然 能够满足 功能需 要, 但 是其尺寸、形状、质量等往往还没有做到最合理, 需要进行进 一步的优化设计 [1] 。装备总质量的控制最 终分解到单个零 部件的质量控制。借助于计算机软件对零 部件进行有限元 分析及拓扑优化设计是快速有效的优化设计手段。
2 上摆臂有限元分析
在 Inven to r中建立其实 体模 型, 通过 标准 交换 文件 导 入 H yperwo rks的 H yperm esh中, 根据 上摆 臂的结 构及 受力 特点, 对模型进行合理的简 化。吊机上 摆臂的 零件主 要为 钢板焊接件, 按薄壳 焊接 箱体 进行分 析。在 H yperm esh中 对抽取的零件中面分别以 混合模 式进行 网格划分 , 单 元格 尺寸为 10, 总计划分网格 54 606个, 其中四 边形网格 53 784 个, 三角形网格 822 个 (见 图 1)。定 义材 料属性 为高 强度
图 2 最不利荷载位置的静位移及应力云图
由表 1可知, 3 种情 况下 所产生 的最 大静位 移与 最大 应力均 相 差 不 大, 两 者 最 大 值 与 最 小 值 之 间 分 别 相 差 5. 88% 和 7. 40% , 表明吊机运行过程中上摆臂受 力均匀。