毕业设计—2015直立车设计与实现
双轮直立智能车设计
双轮直立智能车设计
●系统组成:
1.硬件电路设计:电源、嵌入式微控制器、传感器、电机和控制电路、数据通信的综合系
统
2.机械结构设计:由双轮直立智能车构成的工作平台、承载硬件电路、
3.平衡控制模块:要求自平衡、数据采集、手动控制装置、
4.软件设计和调试控制
●系统功能:
1.硬件设计:减少不必要的调试麻烦
2.平衡信号监测处理:快速检测倾斜信号,保证平衡和倾斜后的调节能力
3.单片机:分析处理检测到的信号,通过相应的c语言实现
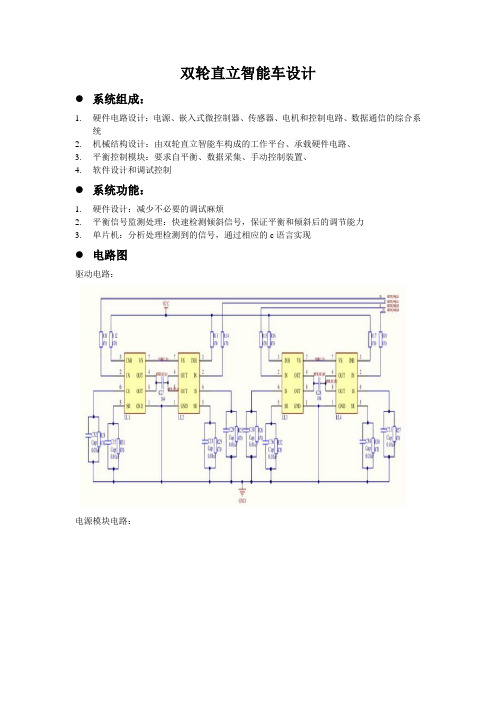
●电路图
驱动电路:
电源模块电路:
陀螺仪电路:
速度传感器电路:
CAN总线原理图:
串口与458接口原理图:
USB转串口原理图:
人机互接口电路:
软件设计:
小车平衡依靠软件设计,软件设计主要包括以下几点:
1.建立软件工程,分配个模块功能并考虑实时调试
2.编写单片机软件程序框架,建立软件编译、下载、调试的环境
3.实施并调试各个子模块的功能的正确性
4.进行车模整体运行性能测试与提高。
直立式双轮自平衡运动小车
长春工业大学电子设计大赛题目:直立式双轮自平衡运动小车(C)编号:日期:摘要车模直立行走比赛是要求仿照两轮自平衡电动车的行进模式,让车模以两个后轮驱动进行直立行走。
近年来,两轮自平衡电动车以其行走灵活、便利、节能等特点得到了很大的发展。
国内外有很多这方面的研究,也有相应的产品。
在电磁组比赛中,利用了原来C型车模双后轮驱动的特点,实现两轮自平衡行走。
相对于传统的四轮行走的车模竞赛模式,车模直立行走在车体检测、控制算法等方面提出了更高的要求。
本设计采用ATMEL公司推出的MEGA16 单片机作为“双轮直立自平衡小车”的微控制器,用以处理任意时刻传感器的数据;通过软件滤波和自动控制理论算法使得小车能够在任意时刻进行自我调整以达到平衡状态。
该系统的传感器采用角度传SCA61T,和陀螺仪采集小车车身的水平状态值和小车的加速度值。
并且采用了LM298双桥大功率集成驱动芯片来驱动电机,无线遥控来控制小车的数据传输。
依靠这些设备和可靠的硬件设计,我们使用了一套PID 闭环控制算法和比较稳定的卡尔曼滤波算法,使得整个硬件结构和软件系统能顺利匹配。
从而使得我们的小车能保持直立自平衡状态。
模糊PID控制具有良好控制效果的关键是要有一个完善的控制规则。
但由于模糊规则是人们对过程或对象模糊信息的归纳,对高阶、非线性、大时滞、时变参数以及随机干扰严重的复杂控制过程,人们的认识往往比较贫乏或难以总结完整的经验,这就使得单纯的模糊控制在某些情况下很粗糙,难以适应不同的运行状态,影响了控制效果。
常规模糊控制的两个主要问题在于:改进稳态控制精度和提高智能水平与适应能力。
在实际应用中,往往是将模糊控制或模糊推理的思想,与其它相对成熟的控制理论或方法结合起来,发挥各自的长处,从而获得理想的控制效果。
关键字:自平衡小车 ATMEGA16单片机直立行走模糊PID一、总体设计方案1.1设计思路:题目要求设计并制作一个单轴两轮自平衡小车。
对于小车能保持平衡,直立行走。
2015届汽车毕业设计要求及格式解析
浙江工贸职业技术学院毕业设计(论文)课题名称:专业:汽车检测与维修班级: ____________ 姓名: ______________________________ 学号: ______________________________ 指导教师:完成时间年月9日目录1前言 (2)2 丰田卡罗拉启动系统构造分析 (2)3 卡罗拉发动机控制电路系统构造分析 (4)4 常见的无法启动故障 (5)5 发动机排故流程 (8)6 案例分析 (9)7结论 (11)8致谢 (11)9参考文献 (11)丰田卡罗拉发动机无法启动故障检修窦夏风浙江工贸职业技术学院汽机学院,汽修0902;指导教师:摘要:发动机是汽车的心脏,是动力的来源。
汽油发动机的正常运行需要三个基本条件:正常的点火、合适的空燃比、正常的缸压。
本文结合丰田卡罗拉轿车的实际维修经验,从发动机启动电路和发动机控制电路方面来讨论丰田卡罗拉汽车发动机无法启动的故障,并利用自己的经验及科学合理的判断方法,减少在维修过程中的故障判断失误率,加快故障排除。
关键字:汽车故障,正常运行,发动机无法启动,故障排除。
本文对丰田卡罗拉发动机起动系统的结构特点和工作情况进行了阐述,浅谈卡罗拉发动机无法启动的原因,并提出检修方法,最后通过案例分析来总结检修经验。
1 引言丰田卡罗拉轿车的正常起动需要多个系统的配合,任何一个系统出现问题都会导致车辆不能起动。
丰田卡罗拉轿车的正常启动需要起动机工作正常;车身电脑ECM工作正常等。
通常引起丰田卡罗拉发动机不能起动的原因有起动继电器的损毁、蓄电池电压不足、AM2或AM1保险丝的烧毁、起动机接地不良、车身电脑ECM+电源端的线路损坏、曲轴传感器NE±的掉落、车身电脑ECM接地不良等。
下面我就对其发动机启动电路系统和发动机动力控制系统故障引起的车辆不能起动,进行简单的分析。
2 丰田卡罗拉启动系统构造分析2.1 控制电路2.1.1第一级控制电路。
基于KL25的直立智能车设计

基于KL25的直立智能车设计翁祥俊【摘要】文章采用了蓝宙电子KL25Z单片机作为控制芯片,实现小车直立、循迹、避障等多任务行驶。
利用陀螺仪和加速度计传感器测量角速度与重力加速度,通过卡尔曼滤波对其输出的信号进行融合,得到准确的倾角信息,从而稳定的控制小车的直立。
采用线性CCD传感器获取赛道信息,实现小车循迹。
利用编码器采集直立小车行驶速度信号,实现速度闭环控制。
通过一定的控制策略,小车能够顺利完成任务。
%This system utilizes a LanZhou KL25Z microcontroller as control core, implementing the car upright, tracking and obstacle avoidance of multitasking. Using gyroscope and accelerometer sensors measuring angular velocity and acceleration of gravity, through the kalman iflter tothe output signal of fusion, get accurate Angle information. That achieves the purpose of stable control of the car upright. The car is realized by using linear CCD sensors track information, tracking.Collection using encoder upright car speed signal to realize speed closed-loopcontrol.Through certain control strategy, the car would be able to complete the task.【期刊名称】《无线互联科技》【年(卷),期】2015(000)017【总页数】2页(P118-119)【关键词】KL25Z;传感器;PID控制算法;卡尔曼滤波【作者】翁祥俊【作者单位】浙江海洋学院,浙江舟山 316022【正文语种】中文随着现代电子技术的发展,智能化越来越成为我们生活中的焦点,智能直立小车也悄无声息的进入了人们的视野。
倒立小车设计与实现
自动控制原理倒立小车的设计与实现目录一、倒立小车设计方案 (4)1.1任务 (4)1.2 过程方案 (4)二、系统设计 (4)2.1硬件电路设计 (4)2.2 车模组装 (7)三、理论分析 (9)3.1倒立小车系统平衡控制分析 (9)3、2倒立小车系统建模及控制分析 (9)四、设备元器件选型 (21)4.1 K60单片机系统 (21)4.1.1 K60处理器简介 (22)4.2电源驱动电路设计 (22)4.3 双电机驱动模块 (23)4.3.1 模块特性 (23)4.3.2 接口说明 (24)4.3.3 电机驱动模块原理图 (24)4.3.4 3.3V辅助电源 (24)4.3.5电机隔离电路 (25)4.3.6 插接件引脚定义图 (25)4.4 landzo飞思卡尔智能车3轴3ENC-03陀螺仪+3轴模拟加速度传感器MMA7361介绍 (26)4.4.1 模块特性 (26)4.4.2 模块结构说明 (26)4.4.3 模块使用方法 (26)一、倒立小车设计要求1.1任务:设计并制作一个倒立小车控制系统,其外形结构如图1所示,要求系统可由两个后轮驱动进行自平衡(基本要求)。
维持小车自平衡的动力都来自于小车的两个后车轮,两个后轮由两个直流电机驱动其转动。
小车的倾角和倾角速度可以通过安装在小车上的加速度传感器和陀螺仪实现。
图1 倒立小车控制系统外形结构1.2 过程方案(1)建立被控对象数学模型;(2)控制系统的理论设计;(3)小车电路设计;(4)小车的系统搭建;(5)小车自平衡程序设计;(6)完成小车的自平衡控制调试。
二、系统设计2.1硬件电路设计2.1.1整体电路框图设计车模控制系统的电路,首先需要分析系统的输入、输出信号,然后选择合适的核心控制嵌入式计算机(单片机),逐步设计各个电路子模块,最后形成完整的控制电路。
系统的输入输出包括:(1)AD转换接口陀螺仪:(2路)一路用于检测车模倾斜角速度,一路用于检测车模转动角速度。
飞思卡尔直立平衡智能车的制作
其中:P为比例项系数,D为微分项系数小车 Nhomakorabea速度控制
检测小车当前实际运行速度的传感 器为编码器(如右上角图片所示)。 该编码器为512线编码器,即编码 器轴每转动一圈,就会产生512个 脉冲。编码器和小车轮子通过齿轮 咬合,即车轮转动编码器轴也跟着 转动,同时产生脉冲。车轮转动得 越快,产生的脉冲也就越多。通过 主控板上的单片机捕获编码器产生 的脉冲然后计算单位时间内编码器 产生的脉冲数就可以测得小车当前 的运行速度v。
direct _ control _ out P *err D * angular
其中:P为比例项系数,D为微分项系数
对小车电机的总输出
前面分析了要想让直立小车在跑道上匀速地跑需要对小车进行三个方面的 控制,这三个方面的控制对应有三个输出,分别为直立控制输出 angle_control_out、速度控制输出V_control_out和方向控制输出 direct_control_out。这三个输出的控制目标(或控制对象)虽然不同,但是 执行机构是一样的,都是小车上的一对电机。在这里,这三个控制输出线 性地叠加在一起,合成一个总的控制输出,作用在小车电机上。叠加公式 如下:
小车的速度控制
我们要求直立小车要在跑道上匀速运动,即我们期望小车的速度是恒定的 Ve。小车的速度控制实际上就是控制小车当前的实际速度接近或者达到我 们预先设定的期望速度。这里,我们采用PID控制策略中的P(比例)I(积分) 控制来控制小车的速度。 给定一个小车的期望速度Ve,同时由编码器测得小车当前的实际速度V,小 车的期望速度与实际速度作一个比较,得到速度偏差err。其中,速度偏差 err作为PI控制中P项的输入。PID控制策略中的积分项(即I项)实际上就是 偏差的累加再乘以一个积分系数I。设integration为速度偏差err的累积结果, 则速度偏差累积结果integration作为PI控制中I项的输入。得到以下速度PI控 制的公式:
小型立式车床毕业设计
小型立式车床毕业设计小型立式车床毕业设计在机械设计与制造专业中,毕业设计是一项重要的任务,旨在让学生将所学知识与实践相结合。
在我即将毕业的这个阶段,我选择了设计一台小型立式车床作为我的毕业设计项目。
本文将介绍我设计的小型立式车床的理念、功能和实施过程。
一、设计理念小型立式车床的设计理念是结合现代制造业的需求和技术发展趋势。
随着科技的进步,机械加工工艺也在不断演进。
传统的车床在尺寸和功能上存在一定的局限性,无法满足现代制造业对高效、精准加工的需求。
因此,我希望设计一台小型立式车床,具备紧凑的尺寸和多功能的特点,能够适应不同的加工需求。
二、功能设计1. 多轴加工能力:小型立式车床将配备多个工作轴,可以同时进行多种加工操作。
这样一来,操作者可以在同一台机器上完成多个工序,提高生产效率。
2. 自动化控制系统:为了提高操作的便捷性和精确性,小型立式车床将采用自动化控制系统。
通过该系统,操作者可以预设加工参数,机器会自动进行加工操作,减少人为因素的干扰,提高加工精度。
3. 精准度保证:小型立式车床将使用高精度的传感器和测量设备,以确保加工过程中的精确度。
同时,还将采用刚性设计和优质材料,以提高机器的稳定性和耐用性。
4. 可编程控制系统:为了适应不同的加工需求,小型立式车床将具备可编程控制系统。
操作者可以根据不同的工件要求,编写相应的加工程序,实现定制化加工。
三、实施过程在设计小型立式车床的过程中,我首先进行了市场调研和需求分析。
通过与制造业企业的交流和了解,我了解到他们对小型车床的需求主要集中在尺寸紧凑、功能多样和高精度等方面。
基于这些需求,我确定了设计目标和功能要求。
接下来,我进行了机械结构设计。
为了确保机器的稳定性和刚性,我采用了铸铁材料,并进行了结构优化。
同时,我还设计了合适的传动系统和刀具支撑结构,以提高加工效果和精度。
在电气控制方面,我选择了先进的可编程控制器,并编写了相应的控制程序。
通过与机械结构的配合,我实现了自动化加工和精确控制。
毕业设计(论文)-两轮自平衡小车的设计
本科毕业设计(论文)题目两轮自平衡小车的设计学院电气与自动化工程学院年级专业班级学号学生姓名指导教师职称论文提交日期两轮自平衡小车的设计摘要近年来,两轮自平衡车的研究与应用获得了迅猛发展。
本文提出了一种两轮自平衡小车的设计方案,采用陀螺仪ENC-03以及MEMS加速度传感器MMA7260构成小车姿态检测装置,使用卡尔曼滤波完成陀螺仪数据与加速度计数据的数据融合。
系统选用飞思卡尔16位单片机MC9S12XS128为控制核心,完成了传感器信号的处理,滤波算法的实现及车身控制,人机交互等。
整个系统制作完成后,各个模块能够正常并协调工作,小车可以在无人干预条件下实现自主平衡。
同时在引入适量干扰情况下小车能够自主调整并迅速恢复稳定状态。
小车还可以实现前进,后退,左右转等基本动作。
关键词:两轮自平衡陀螺仪姿态检测卡尔曼滤波数据融合IDesign of Two-Wheel Self-Balance VehicleAbstractIn recent years, the research and application of two-wheel self-balanced vehicle have obtained rapid development. This paper presents a design scheme of two-wheel self-balanced vehicle. Gyroscope ENC-03 and MEMS accelerometer MMA7260 constitute vehicle posture detection device. System adopts Kalman filter to complete the gyroscope data and accelerometer data fusion.,and adopts freescale16-bit microcontroller-MC9S12XS128 as controller core. The center controller realizes the sensor signal processing the sensor signal processing, filtering algorithm and body control, human-machine interaction and so on.Upon completion of the entire system, each module can be normal and to coordinate work. The vehicle can keep balancing in unmanned condition. At the same time, the vehicle can be adjusted independently then quickly restore stability when there is a moderate amount of interference. In addition, the vehicle also can achieve forward, backward, left and right turn and other basic movements.Key Words: Two-Wheel Self-Balance; Gyroscope; Gesture detection; Kalman filter; Data fusionII目录1.绪论 (1)1.1研究背景与意义 (1)1.2两轮自平衡车的关键技术 (2)1.2.1系统设计 (2)1.2.2数学建模 (2)1.2.3姿态检测系统 (2)1.2.4控制算法 (3)1.3本文主要研究目标与内容 (3)1.4论文章节安排 (3)2.系统原理分析 (5)2.1控制系统要求分析 (5)2.2平衡控制原理分析 (5)2.3自平衡小车数学模型 (6)2.3.1两轮自平衡小车受力分析 (6)2.3.2自平衡小车运动微分方程 (9)2.4 PID控制器设计 (10)2.4.1 PID控制器原理 (10)2.4.2 PID控制器设计 (11)2.5姿态检测系统 (12)2.5.1陀螺仪 (12)2.5.2加速度计 (13)2.5.3基于卡尔曼滤波的数据融合 (14)2.6本章小结 (16)3.系统硬件电路设计 (17)3.1 MC9SXS128单片机介绍 (17)3.2单片机最小系统设计 (19)3.3 电源管理模块设计 (21)3.4倾角传感器信号调理电路 (22)III3.4.1加速度计电路设计 (22)3.4.2陀螺仪放大电路设计 (22)3.5电机驱动电路设计 (23)3.5.1驱动芯片介绍 (24)3.5.2 驱动电路设计 (24)3.6速度检测模块设计 (25)3.6.1编码器介绍 (25)3.6.2 编码器电路设计 (26)3.7辅助调试电路 (27)3.8本章小结 (27)4.系统软件设计 (28)4.1软件系统总体结构 (28)4.2单片机初始化软件设计 (28)4.2.1锁相环初始化 (28)4.2.2模数转换模块(ATD)初始化 (29)4.2.3串行通信模块(SCI)初始化设置 (30)4.2.4测速模块初始化 (31)4.2.5 PWM模块初始化 (32)4.3姿态检测系统软件设计 (32)4.3.1陀螺仪与加速度计输出值转换 (32)4.3.2卡尔曼滤波器的软件实现 (34)4.4平衡PID控制软件实现 (36)4.5两轮自平衡车的运动控制 (37)4.6本章小结 (39)5. 系统调试 (40)5.1系统调试工具 (40)5.2系统硬件电路调试 (40)5.3姿态检测系统调试 (41)5.4控制系统PID参数整定 (43)5.5两轮自平衡小车动态调试 (44)IV5.6本章小结 (45)6. 总结与展望 (46)6.1 总结 (46)6.2 展望 (46)参考文献 (47)附录 (48)附录一系统电路原理图 (48)附录二系统核心源代码 (49)致谢 (52)V常熟理工学院毕业设计(论文)1.绪论1.1研究背景与意义近年来,随着电子技术的发展与进步,移动机器人的研究不断深入,成为目前科学研究最活跃的领域之一,移动机器人的应用范围越来越广泛,面临的环境和任务也越来越复杂,这就要求移动机器人必须能够适应一些复杂的环境和任务。
直立式光电智能车的设计与实现
本科毕业设计(论文)题目:直立式光电智能车的设计与实现2015年 6月14日直立式光电智能车的设计与实现摘要本文以飞思卡尔杯智能车竞赛为背景,完成了直立式光电智能车的机械和硬件结构设计,并研究了不同赛道的图像处理算法。
智能车以MKL26Z256VLL4单片机为控制核心,采用TSL1401线性CCD采集图像,并对二值化图像进行了低通滤波,通过边沿检测算法识别赛道的黑白边沿,求出中心偏差后作为转角的控制量。
为方便调试,在智能车上还设计了OLED液晶显示和蓝牙通讯模块,通过无线通信实现上位机实时图像显示、参数曲线显示和在线调整功能。
实验证明小车可以准确识别赛道,并能保持平稳快速运行。
关键词:图像处理;线性CCD;边沿检测;控制周期The design and implementation of upright photoelectricsmart carAbstractAccording to the requirement of photoelectricity group of Freescale smart car competition, the mechanical structure and hardware of the smart car was completed to improve stability and the image processing algorithms was designed. Based on the microprocessor MKL26Z256VLL4 and TSL1401 Linear CCD, the smart car could successfully identify the black line by edge detection algorithms after low-pass filtering of image. Then the track center line could be obtained and direction control value could be calculated. The smart car was also equipped with OLED and Bluetooth communication module used to transfer images and state data to computers. The parameters of running car could also be changed with software we designed. It made the debugging process more effective. Tests showed that the smart car could identify different tracks and run quickly and stably.Keywords:Image processing; Linear CCD; edge detection;Control period目录第1章引言 (1)1.1 智能车大赛概况 (1)1.2 光电组智能车 (1)1.2.1 光电组智能车的路径检测原理 (1)1.2.2 光电平衡组智能车的优缺点 (1)1.3 系统整体构想 (2)第2章系统硬件电路设计 (3)2.1 硬件电路整体架构设计 (3)2.2 系统主板电路设计[] (3)2.3 系统电源电路设计 (4)2.4 电机驱动电路设计 (4)2.5 线性CCD原理介绍 (5)2.6 蜂鸣器电路设计 (6)2.7 电源地的划分 (6)2.8 硬件电路部分总结 (7)第3章车模机械布局架构与结构调整 (8)3.1 机械部分总体概述 (8)3.2 线性CCD布局与安装 (8)3.3 电池、电路板等部分的固定 (9)3.4 3D模型设计 (10)3.5 角度传感器安装 (11)第4章软件系统设计 (12)4.1 开发工具 (12)4.2 软件控制的总体思路 (12)4.3 主程序设计 (13)4.3.1 主程序结构 (15)4.4 上位机设计 (16)4.4.1串口调试工具 (16)4.4.2 上位机 (16)4.5 角度控制 (17)4.5.1 互补滤波 (17)4.5.2 角度闭环控制 (19)4.6 速度控制 (19)4.7 方向控制 (20)4.7.1图像二值化 (20)4.7.2 图像滤波 (21)4.7.3 赛道元素识别 (22)4.7.4 电机差动控制 (26)4.8 软件部分总结 (27)第5章智能车调试实验 (28)5.1 硬件部分调试 (28)5.1.1 电源模块调试 (28)5.1.2 电机驱动模块调试 (28)5.2 软件部分调试 (28)5.2.1 静态参数调试 (28)5.2.2 动态参数调试 (29)5.3 小结 (30)第6章总结与展望 (31)6.1 总结 (31)6.2 展望 (31)致谢 (32)参考文献 (33)第1章引言1.1 智能车大赛概况全国大学生“飞思卡尔”杯智能汽车竞赛起源于韩国,目前在国内已经发展到第十届。
车模直立方案

第九届全国大学生“飞思卡尔”杯智能汽车竞赛——平衡车直立总结电航学社[2014]PS:本资料仅限大连海事大学电航学社内部交流使用目录前言 ______________________________________________________________________________________________________ 1硬件安装与机械结构 ___________________________________________________________________________________ 2买到车模后(E车模) __________________________________________________________________________________ 2陀螺仪与加速度计 ___________________________________________________________________________________ 3电池固定方式_________________________________________________________________________________________ 4摄像头杆子固定 ______________________________________________________________________________________ 5加速度计与陀螺仪信号采集(模块说明&程序) _______________________________________________________ 6陀螺仪模块简介(最开始用的ENC03) _____________________________________________________________ 7陀螺仪模块简介(最终使用的L3G4200D)_________________________________________________________ 7加速度模块简介(MMA7361)_______________________________________________________________________ 7 MMA7361程序详解&加速度计得到角度方式___________________________________________________ 8 L3G4200D程序详解&陀螺仪积分得到角度方式 ________________________________________________ 9互补滤波-一种很好的控制思想 _____________________________________________________________________ 11两种获取角度的方式及他们的特点 ______________________________________________________________ 11互补滤波思路图解 _________________________________________________________________________________ 11电机控制_______________________________________________________________________________________________ 13 PID与车模直立原理_________________________________________________________________________________ 15调整角度0位置值 _________________________________________________________________________________ 15直立原理简介_______________________________________________________________________________________ 15直立程序(就一句话) _______________________________________________________________________________ 16调整角度零位值与为什么不用自动校正____________________________________________________________ 16速度控制!让车子自己走起来______________________________________________________________________ 16龙丘编码器简介 ____________________________________________________________________________________ 17测速程序讲解_______________________________________________________________________________________ 17车模方向控制 _________________________________________________________________________________________ 20前言本次大赛基本是从0开始做直立,其间有很多经验,也有很多问题,只是写出来能与大家分享,基本就是我的方法的叙述,不能算多么权威的方案,大家以后参考着做,是肯定能把车子立起来走起来的,但如果有更好的方法能让车子走的更稳定,一定要时刻更新!我尽量用最简单的话语表达实现车模直立的步骤,一般初学者肯定是可以跟着做出来的。
两轮直立车控制系统设计

两轮直立车控制系统设计
作者:沙志豪刘璐璐张洪蒲秋梅
来源:《电子技术与软件工程》2016年第06期
摘要本文介绍了两轮直立车控制系统的程序设计和硬件结构。
通过对不同方案设计的实验,确定了目前的机械结构及控制参数,保障了高速行驶时的稳定性。
根据CCD采集到的模拟赛道信息进行图像处理,获得车身位置,并通过控制两轮差速完成方向控制。
描述了两轮直立车车控制系统的设计思想和实现方法,对系统中速度控制、直立控制和方向控制进行了分析,介绍了程序以及中断的设计。
【关键词】智能车角度融合 PID控制 CCD
随着技术的不断进步,两轮直立车凭借着结构简单,行驶方便,节能环保等优势,得到了巨大的发展。
本文设计并搭建了一台能够实现两轮直立行驶的智能车,其中飞思卡尔公司生产的MK40DN512ZVLQ10 单片机为控制核心,重力加速度陀螺仪传感器MPU6050作为车身姿态控制测量元件,通过加速度和角速度的融合获取车身姿态,进而进行直立控制。
捕获车身角度和速度计算两轮电机所需PWM的占空比,以实现速度控制。
线性ccd 采集模拟赛道信息,通过二值化等一系列处理来计算车身所处位置,从而完成两轮直立车的道路行驶。
一种直立智能循迹小车的设计

一种直立智能循迹小车的设计师树恒;曹阳;师素娟【摘要】根据“飞思卡尔”杯智能汽车竞赛的要求,设计了一种以MC9S12XS128为主控制器的直立智能循迹小车系统.系统分别采用倾角陀螺仪和加速度计测量小车的角速度与重力加速度,通过卡尔曼滤波对其输出信号进行数据融合,实现对车体倾角的准确测量;采用水平陀螺仪和电感线圈获取赛道信号,采用光电编码器实时监测车速.主控制器采用PID控制算法不断校正控制参量,从而控制电机运动,实现小车直立、速度和方向控制.试验结果表明,小车能够以2.5 m/s的速度智能循迹,具有广泛的应用前景.【期刊名称】《自动化仪表》【年(卷),期】2014(035)002【总页数】4页(P66-68,72)【关键词】直立小车;智能循迹;MC9S12XS128;卡尔曼滤波;数据融合【作者】师树恒;曹阳;师素娟【作者单位】华北水利水电学院机械学院,河南郑州450011;华北水利水电学院机械学院,河南郑州450011;华北水利水电学院机械学院,河南郑州450011【正文语种】中文【中图分类】TP274+.20 引言根据第七届全国大学生“飞思卡尔”杯智能汽车竞赛要求,电磁组比赛所用车模仿照两轮自平衡车模设计,采用双后轮驱动,车模在直立的状态下沿着赛道行走。
直立行走智能车是一个高阶次、强耦合、多变量的非线性系统,它是直线一级倒立摆和环形一级倒立摆的综合体。
通过分解系统,简化系统,将系统分为直立、行走、转向三方面控制,三者相互叠加、相互影响,最终控制动力均来自电机驱动力。
1 系统整体结构设计智能小车在直立的状态下以两个后轮着地沿着赛道行进,相比四轮着地状态,车模控制任务更为复杂。
系统硬件部分以MC9S12XS128[1-4]为主控制器,软件采用卡尔曼滤波和PID控制算法[5-6]进行数据处理,以实现最佳控制效果。
1.1 系统硬件结构直立智能小车硬件采用模块化设计,主要由全桥电机驱动模块、倾角测量模块、光电编码器、赛道信息检测模块、无线通信模块等构成。
直立小车设计报告
高级组直立车论文报告队长:李逸锋队员:李家兴陈庆峰原理介绍电磁组比赛要求车模在直立的状态下以两个轮子着地沿着赛道进行比赛,相比四轮着地状态,车模控制任务更为复杂。
车模运动控制任务可以分解成以下三个基本任务:(1)控制车模直立:通过控制电机正反向运动保持车模直立状态;(2)控制车模速度:通过控制两个电机转速速度实现车模行进控制;车模倾角测量控制车模直立的算法是通过测量车模的倾角和倾角通过测量车模的倾角和倾角加速度控制车模车轮的加速度来消除车模的倾角,因此车模倾角以及倾角加速度的测量成为控制车模直立的关键。
测量车模倾角和倾角加速度可以通过加速度传感器和陀螺仪实现。
(1)加速度传感器:在硅片上加工形成了一个机械悬臂。
它与相邻的电极形成了两个电容。
由于加速度使得机械悬臂与两个电极之间的距离发生变化,从而改变了两个电容的参数。
通过集成的开关电容放大电路量测电容参数的变化,形成了与加速度成正比的电压输出。
(2)角速度传感器-陀螺仪:它利用了旋转坐标系中的物体会受到克里利奥力的原理,在器件中利用压电陶瓷做成振动单元。
当旋转器件时会改变振动频率从而反映出物体旋转的角速度。
在车模上安装陀螺仪,可以测量车模倾斜的角速度,将角速度信号进行积分便可以得到车模的倾角。
注意:由于陀螺仪输出的是车模的角速度,不会受到车体振动影响。
因此该信号中噪声很小。
车模的角度又是通过对角速度积分而得,这可进一步平滑信号,从而使得角度信号更加稳定。
因此车模控制所需要的角度和角速度可以使用陀螺仪所得到的信号。
由于从陀螺仪的角速度获得角度信息,需要经过积分运算。
如果角速度信号存在微小的偏差,经过积分运算之后,变化形成积累误差。
利用加速度计所获得的角度信息g θ与陀螺仪积分后的角度θ进行比较,将比较的误差信号经过比例g T 放大之后与陀螺仪输出的角速度信号叠加之后再进行积分。
对于加速度计给定的角度g θ,经过比例、积分环节之后产生的角度θ必然最终等于g θ。
基于MSP430的双轮直立行走小车设计与实现
基于MSP430的双轮直立行走小车设计与实现作者:李林衡杨堃牛耀辉来源:《科技创新导报》2017年第19期摘要:移动机器人技术的发展一定程度上代表一个国家的综合科技实力。
该文以MSP430单片机为控制及处理核心,利用控制两个电机正反向运动、调节车模的倾角及控制两个电机之间的转动差速等原理,设计制作了一辆能保持直立平衡、运动速度和方向可人工控制、可以平稳上下坡的两轮直立行走小车。
整个系统由电机驱动模块、倾角传感器电路、速度传感器电路及遥控模块组成,实现了对坡度范围为0°~30°的直立平衡运行,匀速运行速度大于0.38m/s,加速度大于0.14 m/s2,运行过程平稳。
关键词:双轮直立 MSP430 遥控电机控制中图分类号:TP24 文献标识码:A 文章编号:1674-098X(2017)07(a)-0124-02移动机器人一直以来都是国内外机器人学领域的研究热点,其主要类型主要包括轮式、腿式、履带式等[1]。
其中轮式移动机器人是最不稳定的一种,它具有多变量、非线性、强耦合等特性,实现起来有很大的挑战性[2]。
1 双轮车模平衡理论分析1.1 车模的运动学和动力学数学模型直立的车模结构模型可以简化为一个放置在移动平台上的倒立摆。
普通单摆在处于非平衡状态时,重力与悬线的合力使单摆回到平衡位置,此力即回复力。
然而倒立摆不同,当其偏离平衡位置时,其所受重力及支撑力的合力正好促使其加速偏离平衡位置,直至倒下。
因此需外加第三个力作为回复力使小车平衡,该力通过控制底部车轮加速度来提供。
在以车轮为参考的非惯性系中分析倒立摆受力。
倒立摆所受的回复力为:式中,m为车模质量,g为重力加速度,θ为车模偏离平衡位置的倾斜角,a为车模的加速度。
通常,倒立摆在发生微平衡偏移时,就需迅速反应使其恢复平衡,因此θ一般比较小,上式可做线性化处理。
假设负反馈控制是车轮加速度a与偏角θ成正比,比例为k1,当比例k1>g,则回复力方向指向平衡位置。
毕业设计(论文)-重型卡车的造型设计
摘要近几年,我国经济高速发展,随着国家大力进行基础设施建设,推动了运输业的发展,汽车运输一直以方便,安全,高效的特点位居运输业的主力地位。
重卡行业可以说是突飞猛进,不断更新的技术让我们看得都有些目不暇接。
这次设计所作的是重型卡车的设计,具体的说是牵引车设计,根据卡车整体设计的多方面要求来塑造最理想的车身形状,运用艺术的手法、科学地表现卡车的功能、材料、工艺和结构特点。
满足用户在实用性和情感方面的需求,根据用户的购买目的来做功能设计和造型设计,制造满足用户需求的车辆,这一点在轿车行业表现得已经很充分。
同时,造型对车辆的操控性的影响也很重要,如可见度和车窗尺寸等。
根据卡车整体设计的多方面要求来塑造最理想的车身形状。
卡车的设计最主要的造型设计趋势就是注重空气动力学原理,进而提高燃油经济性。
卡车的造型采用流线型可以减小风阻,同时使造型更加富有动感。
同时一个好的设计必须具有前瞻性,在外来科技的支持下能够做更好的造型设计,也就是适当做一些概念化设计。
关键词:重型卡车;牵引车;造型设计;流线型设计;概念设计。
AbstractIn recent years, China's rapid economic development, as China has strongly for infrastructure construction, promote the development of transport, motor transport has been a convenient, safe and efficient transportation among the main features of the status. Heavy truck industry can be said to be rapidly and continuously update the technology so that we see are some dizzying。
两轮直立车平衡控制系统的设计

两轮直立车平衡控制系统的设计靳凯麟【摘要】相较于四轮车来说,两轮直立车的行动更加的方便和灵活,这主要是因为两轮车能够大大减少转弯时的半径。
本研究将对两轮直立车的平衡控制系统进行分析,研究两轮直立车行走、寻迹和速度控制的设计特点。
【期刊名称】《电子制作》【年(卷),期】2015(000)008【总页数】1页(P30-30)【关键词】两轮直立车;平衡控制系统【作者】靳凯麟【作者单位】海南师范大学物理与电子工程学院 571158【正文语种】中文两轮直立车是由电力驱动、能够自我平衡的两轮车,目前已经作为交通工具广泛地应用在了个人交通、室内场馆巡视、工作巡视、警察巡逻等多个方面,且应用范围还在逐渐扩大。
在本次研究中,将对两轮直立车当中的平衡控制系统进行分析。
考虑到传感器能够感应的电压信号较小,因此通过集成运放将信号扩大,接着将信号检波成直流电平并送入AD口。
同步输入编码器信号,通过输入捕捉通道计算出两轮直立车的行驶速度。
通过PID控制算法,对舵机进行控制,并通过连续控制函数对数值进行修正,保证转向的精确性和连续性。
将驱动电机的频率设置为8kHZ,并对电机的输出功率进行调整。
通过LC并联谐振,得到电磁信号,该信号是模拟信号。
对两轮直立车轮子的转速进行改变,从而实现对两轮车方向、速度以及平衡的控制。
这是因为在传感器当中,有用来检测方向的电感,用来检测速度的旋转编码器,用来检测平衡的加速度计和陀螺仪。
注意在控制车模的方向、速度和直立这3个环节当中,都应该使用PID控制,其输出量会通过对电机运动的叠加控制完成。
具体分析:通过PD控制车模的方向,通过PI控制车模的速度,通过PD控制车模的倾角。
值得注意的是,在调节速度的过程中,应做到平滑和缓慢,这是因为车模属于非最小的相位系统,如果反馈控制的速度和比例过大,那么很容易导致正反馈,从而打破系统的稳定性,使车模失控。
图1为硬件的结构图。
以模块化为主要的设计思想和指导,对硬件的系统进行设计。
两轮直立代步平衡车的设计与实现
两轮直立代步平衡车的设计与实现徐光宪;高念【摘要】We put forward a design scheme of the cheap two-wheel balanced upright scooter aimed at the dear balanced scooters in the market.By improving Kalman filter algorithm,we merge the output data of the acceleration sensor and the gyroscope to obtain accurate attitude,use power NMOS to design high-power motor drive circuit,and design PID controller to achieve dynamic balance and steering control of the balanced upright scooter.After testing on actual road,the scooter runs flexibly and is able to adapt to various road conditions,its maximum climbing angle is 30°,the maximum speed is 15 km/h,and the stroke is 60 km.The system costs at about 1300 RMB,and has a very high performance-price ratio.%针对市面上昂贵的两轮平衡车,提出一种廉价的两轮直立代步平衡车的设计方案。
通过改进卡尔曼滤波算法对加速度传感器和陀螺仪输出的数据进行融合得到准确姿态,采用功率 NMOS 设计大功率电机驱动电路,设计 PID 控制器实现直立代步平衡车的动态平衡和转向控制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摘要本文设计的智能车系统以飞思卡尔公司生产的MK60N512ZVLQ10微控制器为核心控制单元,利用线性CCD采集赛道信息,使用软件对采集的信息进行二值化,提取得到赛道两边的黑线信息,用于赛道识别和控制;利用编码器反馈模型车的实际速度,使用PID控制算法调节驱动电机的转速;根据前方黑线的信息,利用偏差计算、中心引导线、十字弯判断、直角弯处理等方法对图像进行处理,根据图像处理得到的黑线偏差关键信息,通过双电机差速控制来实现转向,小车直立,实现了对模型车运动速度和运动方向的闭环控制。
为了提高模型车的速度和稳定性,使用上位机、无线模块、液晶模块等调试工具,进行了大量硬件与软件测试。
实验结果表明,该系统设计方案确实可行。
关键字:MK60N512VLQ10,互补滤波,PID控制,图像分析第一章绪论以智能汽车为研究背景的科技创意性制作,是一种具有探索性的工程实践活动,其本质也是人类创造有用人工物的一种训练性实践,其过程属性是综合,而结果属性很可能是创造。
通过竞赛,参赛的同学们培养了对已学过的基础与专业理论知识与实验的综合运用的能力;带着背景对象中的各种新问题,学习控制、模式识别、传感技术、电子、电气、计算机、机械等多个学科新知识,包括来自不同学科背景大学生的相互学习,逐渐学会了在学科交叉、集成基础上的综合运用;若是以实用为目的,还必须考虑考虑可靠性、寿命、外观工业设计、集成科学与非科学,在具体约束条件下融合形成整体的综合运用。
这样的训练是很有意义的。
在智能车的开发过程中,各参赛队伍需要改装竞赛车模,完成智能巡线小车的制作。
在此过程中需要学习嵌入式系统开发环境与在线编程方法、单片机接口电路设计,自行设计实现识别引导黑线的硬件电路、电机的驱动电路、车速反馈电路、智能车舵机控制电路及能使小车在不驶出赛道的前提下尽可能快速行驶的控制策略与软件算法。
飞思卡尔智能车竞赛到目前为止已经成功组织了七届,在赛制、规则、组别的不断改进中,增加了比赛的观赏性、技术性和实用性。
第二章两轮直立车原理分析2.1直立行走任务分解线性CCD比赛要求车模在直立的状态下以两个轮子着地沿着赛道进行比赛,相比四轮着地状态,车模控制的任务更为复杂。
为了能够很方便找到解决问题的办法,首先将复杂的问题分解成相对简单的问题进行讨论。
为了方便分析,根据要求,假设维持车模的直立、运行的动力全都来自于车模的两个后车轮,后轮的转动由两个直流电机驱动。
因此从控制角度看,由控制车模两个电机旋转方向及速度实现对车模的控制。
车模控制任务可以分解成以下三个任务:(1)车模直立控制:通过控制两个电机正反向运动保持车模直立状态;(2)车模速度控制:通过控制两个电机转速速度实现车模行进控制;(3)车模转向控制:通过控制两个电机之间的转动差速实现车模转向控制。
上面三个任务是通过控制两个直流电机来实现的。
我们可以虚拟的假设每一个任务都是由两个电机控制来实现的,他们同轴相连,分别控制车模的直立、速度、方向,如图2.1 所示。
图 2.1 车模运动控制分解示意图上面三个任务中控制车模的直立是关键任务,相对于直立控制,速度控制和方向控制都是干扰因素,为了减少速度控制和方向控制的干扰,速度和方向控制尽量平滑输出,以减小对直立的干扰。
图2.2 三层控制之间相互配合,底层尽量减少多上层的干扰上面三个任务分为三个单独的任务进行控制,最后通过三个任务的输出量叠加在电机上对电机进行控制。
2.2 车模直立控制车模平衡控制是通过负反馈来实现的。
因为车模有两个轮子着地[2],车体只会在轮子滚动的方向上发生倾斜。
控制轮子转动,抵消在一个维度上倾斜的趋势便可以保持车体平衡了。
如图2.2所示。
图2.2 通过车轮运动保持车模平衡下面对倒立车模进行简单数学建模,然后建立速度的比例微分负反馈控制,根据基本控制理论讨论车模通过闭环控制保持稳定的条件。
假设倒立车模简化成高度为L,质量为m的简单倒立摆,它放置在可以左右移动的车轮上。
假设外力干扰引起车模产生角加速度x(t)。
沿着垂直于车模地盘方向进行受力分析,可以得到车模倾角与车轮运动加速度a(t)以及外力干扰加速度x(t)之间的运动方程。
如图2.3所示。
对应车模静止时,系统输入输出的传递函数为:H(s)此时系统具有两个极点。
其中一个极点位于s平面的右半平面,因此车模不稳定。
车模引入比例、微分反馈之后的系统如下图所示:图2.4 加入比例微分反馈后的系统框图系统传递函数:系统稳定需要两个极点都位于s平面的左半平面。
要满足这一点,需要k1>g,k2>0。
由此可以得出结论,当k1>g,k2>0 时,直立车模可以稳定。
在角度反馈控制中,与角度成比例的控制量是称为比例控制;与角速度成比例的控制量称为微分控制(角速度是角度的微分)。
因此上面系数分别称为比例和微分控制参数。
其中微分参数相当于阻尼力,可以有效抑制车模震荡。
通过微分抑制控制震荡的思想在后面的速度和方向控制中也同样适用。
总结控制车模直立稳定的条件如下:(1)能够精确测量车模倾角θ的大小和角速度θ'的大小;(2)可以控制车轮的加速度。
(2)可以控制车轮的加速度。
2.3 车模速度控制对于直立车模速度的控制相对于普通车模的速度控制则比较复杂。
由于在速度控制过程中需要始终保持车模的平衡,因此车模速度控制不能够直接通过改变电机转速来实现,而要通过改变车身倾角来实现。
以加速过程为例,将角度控制的输出量减少一定的量,则车模有了一个向前的倾斜角度,在直立控制的作用下,车轮需要向前加速,此时车模就会向前加速。
控制框图如图2.13所示。
图2.13 速度角度控制方案改进后的角度和速度控制方案如下图所示:2.4 车模方向控制实现车模方向控制是保证车模沿着竞赛道路比赛的关键。
通过线性CCD检测道路两边的黑线可以计算出车身的位置偏差,并利用电机差动控制实现方向控制,从而进一步保证车模在赛道上。
利用线性CCD检测到的偏差信号分别与两个车轮的控制信号进行加和减,形成左右轮差动控制电压,使得车模左右轮运行角速度不一致进而控制车模方向。
如图2.16所示。
图2.12 通过差动控制左右电机驱动电压控制车模方向2.5 车模角度和角速度测量车模倾角以及倾角速度的测量成为控制车模直立的关键。
测量车模倾角和倾角速度可以通过安装在车模上的加速度传感器和陀螺仪实现。
(1)加速度传感器加速度传感器可以测量由地球引力作用或者物体运动所产生的加速度。
图2.13 加速度传感器通过微机械加工技术在硅片上加工形成了一个机械悬臂。
它与相邻的电极形成了两个电容。
由于加速度使得机械悬臂与两个电极之间的距离发生变化,从而改变了两个电容的参数。
通过集成的开关电容放大电路量测电容参数的变化,形成了与加速度成正比的电压输出。
MMA7260 是一款三轴低g 半导体加速度计,可以同时输出三个方向上的加速度模拟信号,如图2.14 所示。
图2.14 三轴加速度传感器通过设置可以使得MMA7260 最大输出灵敏度为800mV/g。
只需要测量其中一个方向上的加速度值,就可以计算出车模倾角,比如使用Z 轴方向上的加速度信号。
车模直立时,固定加速度器在Z 轴水平方向,此时输出信号为零偏电压信号。
当车模发生倾斜时,重力加速度g 便会在Z 轴方向形成加速度分量,从而引起该轴输出电压变化。
变化的规律为Δu = kg sinθ式中,g为重力加速度;θ为车模倾角;k为比例系数。
当倾θ比较小的时候,输出电压的变化可以近似与倾角成正比。
只需要加速度就可以获得车模的倾角,再对此信号进行微分便可以获得倾角加速度。
但在实际车模运行过程中,由于车模本身的运动所产生的加速度会产生很大的干扰信号叠加在上述测量信号上,使得输出信号无法准确反映车模的倾角,如图2.15所示。
图 2.15 车模运动引起加速度计信号波动车模运动产生的振动加速度使得输出电压在实际倾角电压附近波动,可以通过数据平滑滤波将其滤除。
但是平滑滤波也会使得信号无法实时反映车模倾角的变化,从而减缓对于车模车轮控制,使得车模无法保持平衡。
因此对于车模直立控制所需要的倾角信息需要通过另外一种器件获得,那就是角速度传感器-陀螺仪。
(2)角速度传感器-陀螺仪陀螺仪可以用来测量物体的旋转角速度。
选用EN-03 系列的加速度传感器。
它利用了旋转坐标系中的物体会受到克里利奥力的原理,在器件中利用压电陶瓷做成振动单元。
当旋转器件时会改变振动频率从而反映出物体旋转的角速度。
在车模上安装陀螺仪,可以测量车模倾斜的角速度,将角速度信号进行积分便可以得到车模的倾角。
如图2.16所示。
图2.16 测量车模角速度和角度由于陀螺仪输出的是车模的角速度,不会受到车体振动影响。
因此该信号中噪声很小。
车模的角度又是通过对角速度积分而得,这可进一步平滑信号,从而使得角度信号更加稳定。
因此车模控制所需要的角度和角速度可以使用陀螺仪所得到的信号。
由于从陀螺仪的角速度获得角度信息,需要经过积分运算。
如果角速度信号存在微小的偏差,经过积分运算之后,变化形成积累误差。
这个误差会随着时间延长逐步增加,最终导致电路饱和,无法形成正确的角度信号,如图2.17 所示。
图2.17 角度积分漂移对于积累误差的消除,可以通过上面的加速度传感器获得的角度信息对此进行校正,如图2.18所示。
图2.18 角度积分漂移校正与陀螺仪积分后的角度θ进行比较,将比较的误利用加速度计所获得的角度信息θg差信号经过比例T g放大之后与陀螺仪输出的角速度信号叠加之后再进行积分。
从图2.18中的框图可以看出,对于加速度计给定的角度θ,经过比例、积分环节之后产生的角g度θ必然最终等于θg。
由于加速度计获得的角度信息不会存在积累误差,所以最终将输出角度θ中的积累误差消除了。
加速度计所产生的角度信息θg中会叠加很强的有车模运动加速度噪声信号。
为了避免该信号对于角度θ的影响,因此比例系数Tg应该非常小。
这样,加速度的噪声信号经过比例、积分后,在输出角度信息中就会非常小了。
由于存在积分环节,所以无论比例Tg多么小,最终输出角度θ必然与加速度计测量的角度θg相等,只是这个调节过程会随着Tg的减小而延长。
为了避免输出角度θ跟着θg过长,可以采取以下两个方面的措施:(1)仔细调整陀螺仪的放大电路,使得它的零点偏置尽量接近于设定值,并且稳定。
(2)在控制电路和程序运行的开始,尽量保持车模处于直立状态,这样一开始就使得输出角度θ与θg相等。
此后,加速度计的输出只是消除积分的偏移,输出角度不会出现很大的偏差。
加速度计和陀螺仪以及融合后的波形如图所示红色为加速度计的波形,白色为融合后的波形,黄色为陀螺仪积分后的角度波形2.6 车模直立行走控制算法总图将车模直立行走主要的控制算法集中起来,形成控制算法总框图,如图2.19图2.19 车模运动控制总框图为了实现车模直立行走,需要采集如下信号:(1)车模陀螺仪信号;(2)车模加速度计信号(z 轴信号);(3)车模电机转速脉冲信号;(4)车模偏差信号(两路)。