实验室智能系统演示
实验室智能管理系统核心功能介绍

实验室智能管理系统核心功能介绍实验室智能管理系统,TDM—Test Data Management试验数据管理系统,是专门为管理企业试验数据而设计的试验业务综合管理平台。
主要解决企业试验数据管理和利用效率问题,涉及到与企业试验过程执行、试验辅助资源、数据采集、数据管理、安全控制、企业软件协同方面的管理功能。
它填补了产品研制过程中试验环节数据管理空白,是企业产品研制过程中必不可少的信息化试验管理系统。
实验室智能管理系统,神鹰®TDM是由天健通泰科技自主研发,在军工及制造业多年成功案例的累积下不断完善的成熟产品,TDM系统为用户提供业务流程管理;试验过程监控;数据采集、分析、挖掘试验资源、知识、标准管理并提供与其他信息系统接口集成。
采用试验数据管理TDM能够提高试验数据利用率、积累试验相关知识与经验、全面提升试验数字化管理水平。
实验室智能管理系统核心功能介绍试验项目管理类project的管理方式。
试验数据管理平台的项目管理主要是把各种系统、方法和人员结合在一起,在规定的时间、目标范围内完成的各项工作。
项目管理从初期的项目制定,到对项目进行审核,审核通过后进入项目执行阶段,可以对项目进行再分配、记录项目进度日志、填写项目任务的完成情况。
项目编制。
提供试验项目基础信息的编制、附件上传,提供项目编制模板的调用。
提供项目负责人和项目成员的指定。
项目分解。
提供试验项目的分解,把试验项目分解为多个组成部分,提供结构树方式的分解。
任务定制。
提供在项目的每个组成部分制定试验任务,填写试验任务基础信息、产品信息等、附件上传。
任务执行。
提供试验任务中试验表单的填写、数据的导入,试验任务状态的修改,提供试验报告的自动生成。
资源板块设备管理。
建立完整的设备台账信息,提供设备类型多级动态自定义方式进行管理。
可创建设备的保养计划、定检计划、期间核查计划,并记录相关的养护记录。
随时可查询使用记录、维修记录和设备的统计信息。
实验室及实践教学智能管理系统教师填报实验课表操作说明
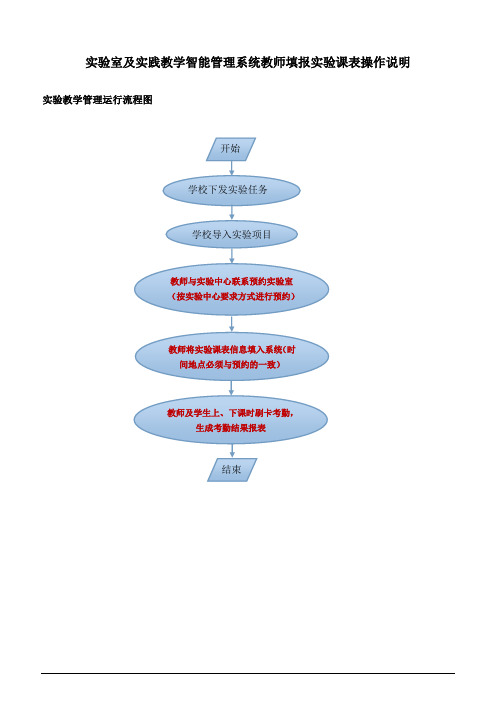
实验室及实践教学智能管理系统教师填报实验课表操作说明实验教学管理运行流程图
教师排课详细操作说明:
1、教师使用工号登陆系统,密码默认和工号一致(大部分教师改过密码,如有遗忘,请联系学校教务处管理员58731278谢老师进行查询)。
2、登陆后,点击左边菜单“实验课表”。
进入如下图界面:
2.1第一步,选择开课项目
在上图中,实验课程后,点击“第一步选择项目”,设置本学期开课的实验项目。
进入如图界面:
设置好项目后,系统会自动返回上级页面。
提示:实验项目设置,须满足勾选项目的实验学时之和等于实验任务要求的实验学时+上机学时。
在系统返回的页面,中间位置,选择将要排课的课程,如图:
上图中,按照:是否分组(选填)→上课时间(必填)→上课教师(选填)→实验地点(必
填) 备注(选填)的顺序,依次将每个项目的时间地点安排填写好。
最终点击下方的“提交”按钮即完成排课任务。
提示:
①当选择好上课地点后,对应行将变为灰色,无法修改,可以通过点击所在行最后列的“修改时间”进行本行课表内容的修改。
②课表不提交,则系统自动暂存。
只有提交后,排课任务才算完成。
课表提交后,教师本人将不可以修改。
若要修改,可由课程归属学院的学院管理员,在“实验教学管理”下“课表退回”进行退回后,教师可以重新修改并提交。
课表提交以后,显示效果如下图。
【不得不看】实验室智能管理系统核心功能概况

【不得不看】实验室智能管理系统核心功能概况文章内容检索重点:企业知识管理系统、实验室仪器管理系统、实验室智能管理系统、lims 实验室管理系统、可视化实验室、实验室仪器管理系统。
现阶段很多实验室管理模式都是封闭、滞后、效率低等现象,直接影响到实验情况。
在信息时代的背景下,各实验室都应该与时俱进,与信息接轨,才能做好更好的实验。
那么,拥有一个系统化的实验室信息化建设,是众多实验室的必备需求。
下面小编给大家带来实验室智能管理系统核心功能概况。
随实验室智能管理系统核心功能介绍试验项目管理类project的管理方式。
试验数据管理平台的项目管理主要是把各种系统、方法和人员结合在一起,在规定的时间、目标范围内完成的各项工作。
项目管理从初期的项目制定,到对项目进行审核,审核通过后进入项目执行阶段,可以对项目进行再分配、记录项目进度日志、填写项目任务的完成情况。
项目编制。
提供试验项目基础信息的编制、附件上传,提供项目编制模板的调用。
提供项目负责人和项目成员的指定。
项目分解。
提供试验项目的分解,把试验项目分解为多个组成部分,提供结构树方式的分解。
任务定制。
提供在项目的每个组成部分制定试验任务,填写试验任务基础信息、产品信息等、附件上传。
任务执行。
提供试验任务中试验表单的填写、数据的导入,试验任务状态的修改,提供试验报告的自动生成。
资源板块设备管理。
建立完整的设备台账信息,提供设备类型多级动态自定义方式进行管理。
可创建设备的保养计划、定检计划、期间核查计划,并记录相关的养护记录。
随时可查询使用记录、维修记录和设备的统计信息。
提供设备报废管理。
样品管理。
建立样品库,依据企业样品属性建立管理档案。
提供样品接收、出/入库及检验后处理方式全过程管理和记录。
标准物质,耗材。
建立档案品库,提供样品接收、出/入库及检验后处理方式全过程管理和记录人员。
试验人员基础的维护、供多资质的管理,自动记录工作、工时。
同时也提供针对人员培训记录,包括培训时间、培训内容、培训资料,可是反复学习。
江森自控TRIATEK智慧实验室一体式解决方案 (3)

江森自控TRIATEK智慧实验室一体式解决方案
江森自控TRIATEK智慧实验室一体式解决方案是为实验室环境提供智能化、高效化和节能化的集成解决方案。
其主
要特点包括以下几个方面:
1. 全面的智能化控制系统:TRIATEK智慧实验室一体式解
决方案可以集中监控实验室的空气质量、温湿度、风速、
气流分布等参数,并自动调整系统运行以满足实验要求。
同时,该解决方案支持无线遥控和远程监控,方便实验人
员对实验室进行远程控制和管理。
2. 先进的空气净化系统:TRIATEK智慧实验室一体式解决
方案采用高效过滤器和化学吸附技术,可以有效去除实验
室中的有害气体、微粒和细菌等污染物,保证实验环境的
安全和洁净。
3. 高效的节能措施:TRIATEK智慧实验室一体式解决方案
通过智能化调控系统和能源管理系统,实现对实验室用电、
空调、照明等设备的智能控制和高效管理,最大限度地节约能源消耗。
4. 安全可靠的工程设计:TRIATEK智慧实验室一体式解决方案具备全面、细致的工程设计,确保实验室系统的稳定运行和安全性。
同时,该解决方案支持智能化报警和紧急停机措施,确保实验室在突发情况下能够有效应对。
综上所述,江森自控TRIATEK智慧实验室一体式解决方案是一套集成化、智能化、节能化和安全可靠的解决方案,可以有效提高实验室的工作效率和环境质量。
实验室智能监控系统设计

瀹為獙瀹ゆ櫤鑳界洃鎺х郴缁熻璁?鎽? 瑕侊細璁捐浜嗕竴绉嶅熀浜嶱LC+STM32鐨勬櫤鑳藉疄楠屽SCADA绯荤粺銆俁TU纭欢閲囩敤鍒嗘暎寮忕殑缁撴瀯锛屽皢鍘熸潵鐢变竴涓狹CU瀹屾垚鐨勫鏉備换鍔″垎鏁g粰澶氫釜MCU鍏卞悓瀹屾垚锛岀郴缁熷彲闈犳€у拰鏁版嵁澶勭悊閫熺巼寰楀埌澶у箙搴︽彁楂樸€俁TU杞欢閬靛惊鍙厤缃€у師鍒欙紝姣忎釜GPIO鍙互閽堝涓嶅悓鐨勭敤閫旈噸鏂伴厤缃垚锛屾彁楂樹簡杞欢鐨勫紑鍙戞晥鐜囥€傝皟璇曠粨鏋滆〃鏄庯紝璇ョ郴缁熻繍琛岀ǔ瀹氾紝淇濊瘉瀹為獙瀹ゅ悇鐜鍙傛暟婊¤冻璁惧畾瑕佹眰銆傚叧閿瘝锛?SCADA锛?瀹為獙瀹わ紱鐩戞帶绯荤粺锛?鍒嗘暎寮?瀹為獙瀹ゆ槸杩涜鍚勭瀹為獙宸ヤ綔鐨勭壒娈婄幆澧冦€備负浜嗕繚璇佹暣涓疄楠屽绯荤粺瀹夊叏鍙潬鍦拌繍琛岋紝瀹炴椂妫€娴嬨€佺洃鎺у疄楠屽鍚勯」鐜鍙傛暟锛屼繚璇佸疄楠屽鐘舵€佺ǔ瀹氾紝骞跺湪鍙戠敓鎰忓鎴栬€呯郴缁熷嚭鐜版晠闅滄椂锛岃嚜鍔ㄩ噰鍙栦竴瀹氱殑淇濇姢鎺柦锛岃璁′竴绉嶆櫤鑳藉疄鏃剁洃鎺х郴缁熸槸闈炲父蹇呰鐨勩€? 鏈枃鎻愬嚭涓€绉嶅垎鏁e紡缁撴瀯鐨凷CADA鏅鸿兘瀹為獙瀹ょ郴缁燂紝灏嗗師鏈敱涓€涓狹CU澶勭悊鐨勫鏉備换鍔″垎鏁g粰澶氫釜MCU鍏卞悓澶勭悊锛屼粠鑰屼娇绯荤粺鐨勫彲闈犳€с€佺ǔ瀹氭€у強澶勭悊鏁版嵁閫熷害銆佺郴缁熸晥鐜囧ぇ骞呭害鎻愰珮锛屽寮轰簡绯荤粺鐨勫彲鎵╁睍鎬у拰鍙敼閫犳€с€? 鏁版嵁閲囬泦涓庣洃鎺х郴缁烻CADA(Supervisory Control And Data Acquisition)鏄互璁$畻鏈恒€侀€氫俊缃戠粶涓哄熀纭€鐨勭敓浜ц繃绋嬫帶鍒朵笌璋冨害鑷姩鍖栫郴缁熴€傞€氳繃瀵圭幇鍦虹殑杩愯璁惧杩涜鐩戣鍜屾帶鍒讹紝瀹炵幇鏁版嵁閲囬泦銆佽澶囨帶鍒躲€佹祴閲忋€佸弬鏁拌皟鑺傚強鍚勭被淇″彿鎶ヨ绛夊姛鑳絒1]銆傛牴鎹甋CADA绯荤粺缁撴瀯锛岃鏅鸿兘瀹為獙瀹CADA绯荤粺鐢盧TU銆丠MI銆乀COM 3涓眰娆℃瀯鎴愩€傝繙绋嬫帶鍒跺崟鍏僐TU(Remote Terminal Unit)(鍗充紶缁熺殑涓嬩綅鏈?,涓昏璐熻矗瀹為獙瀹ゅ弬鏁伴噰闆嗗拰鎺у埗锛涗汉鏈烘帴鍙MI(Human Machine Interface)锛屼富瑕佽礋璐f彁渚涜壇濂界殑浜烘満鎺ュ彛锛涜繙绋嬮€氫俊缃慣COM(Telecommunication)锛岀敤浜嶩MI涓庡悇RTU涔嬮棿鐨勯€氫俊銆? 鎬讳綋鏋舵瀯鏅鸿兘瀹為獙瀹ゆ€讳綋鏋舵瀯鐢辨埧闂存帶鍒剁郴缁熴€佹皵娴佹帶鍒剁郴缁?鍗抽€氶鏌滄帶鍒剁郴缁熷拰闃€鎺у埗绯荤粺)銆佽繙绋嬫帶鍒剁郴缁熷強浜烘満鎺ュ彛閮ㄥ垎缁勬垚銆傘€?鎴块棿鎺у埗閮ㄥ垎鏄疄楠屽鐩戞帶绯荤粺鐨勬牳蹇冿紝杩炴帴鐫€PLC銆侀榾鎺у埗鍣ㄣ€侀€氶鏌滄帶鍒跺櫒浠ュ強瑙︽懜灞忥紝涓昏璐熻矗閲囬泦鎴块棿鍙傛暟锛屽苟鍙戦€佸懡浠ょ粰PLC銆侀榾鎺у埗鍣ㄣ€侀€氶鏌滄帶鍒跺櫒锛屼互鎺у埗鏁翠釜瀹為獙瀹ょ殑姝e父杩愯銆傛皵娴佹帶鍒堕儴鍒嗗拰闃€鎺у埗鍣ㄤ富瑕佹牴鎹埧闂存帶鍒跺櫒鍙戦€佸弬鏁板拰鍛戒护锛孭ID璋冭妭鎴块棿閫?鎺掗锛屽湪淇濊瘉鎴块棿鏈€灏忔崲姘旀鏁扮殑鍓嶆彁涓嬶紝淇濊瘉鎴块棿鐨勮礋鍘嬬幆澧冦€傝繙绋嬫帶鍒堕儴鍒嗙敱杩滅▼PC鍜孭LC缁勬垚锛岀敤鎴峰彲浠ラ€氳繃PC鏈虹殑涓婁綅鏈鸿蒋浠跺彂閫佸懡浠ょ粰PLC鍜屾埧闂存帶鍒跺櫒锛屼粠鑰岃揪鍒拌繙绋嬫帶鍒舵暣涓郴缁熺殑鏁堟灉銆? 浜烘満鎺ュ彛闄や簡杩滅▼PC澶栵紝姣忎釜鎴块棿鎺у埗鍣ㄩ兘閰嶆湁涓€鍙?鑻卞娑叉櫠瑙︽懜灞忥紝鐢ㄦ埛鍙互閫氳繃瑙︽懜灞忓彂閫佸懡浠ょ粰鎴块棿鎺у埗鍣紝鎺у埗鏁翠釜绯荤粺鐨勮繍琛屻€傛澶栵紝鐩戞帶绯荤粺杩樺寘鍚姤璀﹁缃紝褰撴埧闂村弬鏁拌秴鍑鸿瀹氬€硷紝鎴栬€呭嚭鐜版瘨姘旀硠婕忕瓑鍗遍櫓鎯呭喌鏃跺嵆鍒诲彂鍑烘姤璀︿俊鍙枫€? 鎴块棿鎺у埗閮ㄥ垎鎴块棿鎺у埗閮ㄥ垎鐢辨埧闂存帶鍒跺櫒鍜屼紶鎰熷櫒缁勬垚銆傛埧闂存帶鍒跺櫒浠TM32F105RB澶勭悊鍣ㄤ负涓绘帶鍒禡CU锛岄€氳繃AI妯″潡閲囬泦娓╁害銆佹箍搴︺€佸帇鍔涖€侀閲忕瓑淇℃伅锛屽苟閫氳繃DI妯″潡閲囬泦寮€鍏抽噺淇℃伅锛岄€氳繃AO妯″潡璋冭妭绯荤粺鐨勯€?鎺掗閲忓拰娓╁害锛岄€氳繃DO妯″潡鏀瑰彉绯荤粺鍚勫紑鍏抽噺鐨勮緭鍑虹姸鎬侊紝鎴块棿鎺у埗閮ㄥ垎缁撴瀯銆?STM32F105RB鏄熀浜嶢RM CORTEX-M3鏍哥殑32浣峈ISC澶勭悊鍣紝鐩告瘮ARM7閫熺巼鎻愰珮1/3锛屽姛鑰楅檷浣?/4锛屾渶楂樿繍琛岄鐜囧彲浠ヨ揪鍒?2 MHz銆傞厤澶嘋AN妯″潡銆丷S485涓插彛妯″潡銆佺數婧愭ā鍧椼€?浣岲I鍙?浣岲O妯″潡銆備笉浠呮兜鐩栦簡鐜版湁鐨凷TM32F103鐨勫姛鑳斤紝鑰屼笖鍦ㄦ鍩虹涓婂鍔犱簡缃戠粶鍔熻兘[2]銆? 娓╁害妫€娴嬫ā鍧楅噰鐢ㄧ憺澹紵鎷揤ector瀹ゅ唴娓╁害浼犳劅鍣⊿RA-T1锛孍EPROM鑷姩淇濆瓨鏈€鍊艰褰曪紝鍏锋湁鎺夌數瀛樺偍鍔熻兘銆係RA-T1瀹ゅ唴娓╁害鍙橀€佸櫒鎰熸俯鏁忔劅鍏冧欢鏄疦TC鐢甸樆锛屽彉閫佸櫒鐢佃矾鐨勫井澶勭悊鍣ㄦ瘡绉掑娓╁害閲囨牱涓€娆°€傛护娉㈡椂闂磋绠椾俊鍙峰钩鍧囧€硷紝骞朵笖鏍规嵁婀垮害閲忕▼鍋氱嚎鎬у彉鎹紝鐒跺悗浜х敓淇″彿杈撳嚭锛屼繚璇佸閮ㄥ共鎵板姝ゅ彉閫佸櫒褰卞搷鏈€灏忋€傞粯璁ゆ护娉㈠钩鍧囨椂闂?0 s锛屾祴閲忚寖鍥?~+50鈩?+32~+122°F)銆傛湰绯荤粺姣忎釜鎴块棿閰嶇疆涓€涓猄RA-T1瀹ゅ唴娓╁害浼犳劅鍣紝閲囩敤24 V鐩存祦渚涚數锛岃緭鍑?~10 V鐢靛帇锛屾帴鍏ユ埧闂存帶鍒跺櫒鐨凙I 妯″潡銆傛埧闂存帶鍒跺櫒灏嗙數鍘嬭浆鎹负娓╁害锛屽偍瀛樺湪RAM涓紝鏈€鍚庡湪涓婁綅鏈轰笂鏄剧ず銆? 姘旀祦鎺у埗閮ㄥ垎鏃犺搴旂敤浜庝綍绉嶈涓氾紝瀹為獙瀹ゆ皵娴佹帶鍒剁郴缁熷浜庡疄楠屽浜哄憳鐨勪汉韬畨鍏ㄩ兘鏄嚦鍏抽噸瑕佺殑銆傚繀椤荤‘淇濆疄楠屽鏈夋瘨姘斾綋浠庨€氶鏌滃畨鍏ㄦ帓鏀撅紝缁存寔鍚堥€傜殑娓?婀垮害鐜鍜屽疄楠屽璐熷帇銆傚洜姝ゅ疄楠屽閫氶绯荤粺鍦ㄦ櫤鑳藉疄楠屽绯荤粺涓叿鏈夊緢閲嶈鐨勪綔鐢ㄣ€? 鐩戞帶绯荤粺閫佹帓椋庨噰鐢ㄥ叏鏂伴鐩存祦寮忚缃強鍘嬪樊鍜屾俯宸帶鍒讹紝鍝嶅簲蹇€熴€傞€侀绌鸿皟鏈哄皢瀹ゅ椋庡鐞嗚嚦閫侀鐘舵€侊紝鐒跺悗閫佸叆瀹為獙瀹ゅ唴锛岃ˉ鍏呭疄楠屽鎺掗锛岀淮鎸佸疄楠屽鍐呮俯/婀垮害鍜岃礋鍘嬬幆澧僛3]銆傞€侀鏈哄拰鎺掗鏈哄悇2鍙帮紝涓€鐢ㄤ竴澶囥€傜敱浜庡疄楠屽鏄叏鏂伴绯荤粺锛屽疄楠屽閫侀閲忚緝澶э紝瀵艰嚧绯荤粺鑳借€楀拰杩愯鐨勭數璐硅緝澶э紝鏁呭皢PLC鍜屽彉棰戝櫒鎶€鏈痆4-5]搴旂敤浜庡疄楠屽鎺у埗绯荤粺涓紝閫氳繃妫€娴嬬閬撴湯绔帇鍔涳紝璋冭妭鍙橀鍣ㄩ鐜囷紝鍦ㄤ繚璇佹埧闂存渶灏忔崲姘旀鏁扮殑鍓嶆彁涓嬶紝闄嶄綆閫侀閲忥紝浠庤€岃揪鍒拌妭鑳姐€佸噺灏戝姛鑰楃殑鐩殑銆傚悇鎺у埗鍣ㄩ€氫俊鍥俱€?姘旀祦鎺у埗涓紝閫氶鏌滄帶鍒跺櫒棣栧厛閫氳繃AO妯″潡灏嗚皟鑺傞棬寮€搴﹀彂閫佺粰鎺掗鏂囦笜閲岄榾鎺у埗鍣紝骞堕€氳繃485鎬荤嚎灏嗛€氶鏌滃紑鍏虫満鐘舵€併€侀潰椋庨€熴€佺揣鎬ユ帓椋庣瓑淇℃伅浼犺緭缁欐帓椋庢枃涓橀噷闃€鎺у埗鍣ㄣ€傜劧鍚庢帓椋庢枃涓橀噷闃€鎺у埗鍣ㄦ牴鎹皟鑺傞棬寮€搴︼紝搴旂敤PID 鏂规硶閫氳繃鎺掗鏂囦笜閲岄榾寮€搴﹁皟鑺傛帓椋庨噺锛屽悓鏃舵帓椋庨榾鎺у埗鍣ㄤ細灏嗛榾寮€搴﹀弽棣堢粰閫氶鏌滄帶鍒跺櫒锛岄€氶鏌滀細灏嗛榾寮€搴︿笌璋冭妭闂ㄥ紑搴﹁繘琛屾瘮杈冿紝鍒ゆ柇闃€鎺у埗鍣ㄦ槸鍚︽甯歌繍琛屻€傛帓椋庨榾鎺у埗鍣ㄨ繕浼氶€氳繃AO妯″潡灏嗘帓椋庨噺鍙戦€佺粰鎴块棿鎺у埗鍣紝骞堕€氳繃CAN 鎬荤嚎灏嗛€氶鏌滃悇绉嶄俊鎭彂閫佺粰鎴块棿鎺у埗鍣ㄣ€傛埧闂存帶鍒跺櫒浼氬皢閲囬泦鍒扮殑鎺掗閲忓彂閫佺粰閫侀鏂囦笜閲岄榾锛岄€侀鏂囦笜閲岄榾浼氭牴鎹帓椋庨噺璋冭妭閫侀闃€寮€搴︼紝浠庤€岃皟鑺傞€侀閲忥紝骞朵笖閫侀闃€鎺у埗鍣ㄤ細灏嗗疄闄呴€侀閲忓弽棣堢粰鎴块棿鎺у埗鍣ㄣ€傛渶鍚庢埧闂存帶鍒跺櫒浼氬皢閫氶鏌滀俊鎭€侀€?鎺掗閲忋€佹俯/婀垮害鍙婂帇鍔涚瓑淇℃伅鏄剧ず鍦ㄨЕ鎽稿睆涓娿€傜敱姝ゅ緱鍑虹洃鎺х郴缁熸皵娴佹帶鍒堕儴鍒嗙殑鍏抽敭鍦ㄤ簬閫氶鏌滅郴缁燂紝鍙璋冭妭闂ㄥ紑搴﹀彂鐢熸敼鍙橈紝鍒欐帓椋庨噺鍙戠敓鏀瑰彉锛岄殢涔嬮€侀閲忎篃鐩稿簲鍙戠敓鏀瑰彉锛岃€屼笖鍦ㄥ嚑姣鍐呭搷搴斻€? RTU杞欢绯荤粺杞欢璁捐閲囩敤浼犵粺鐨勬棤闄愬惊鐜柟寮忥紝寮€鍙戝钩鍙伴噰鐢↘eilMDK锛岄噰鐢⊿TM32鍥轰欢搴揤ER3.5鐗堟湰寮€鍙戠▼搴廩6]銆傛寜鐓х伒娲绘€у拰鍙噸鏂伴厤缃師鍒欙紝姣忎釜AI銆丄O銆丏I銆丏O绔彛閮藉彲浠ラ厤缃垚涓轰笉鍚岀殑鍔熻兘锛屽AI1鏃㈠彲浠ヤ綔涓烘俯搴︿紶鎰熷櫒鐨勮緭鍏?涔熷彲浠ヤ綔涓哄帇鍔涗紶鎰熷櫒鐨勮緭鍏ワ紝鍚屼竴鏃跺埢鍙兘閰嶇疆涓€涓姛鑳斤紝鍙互閫氳繃涓婁綅鏈鸿蒋浠舵垨鑰呰Е鎽稿睆璁剧疆[7]銆? 涓荤▼搴忚繍琛屾祦绋嬶紝褰撶郴缁熶笂鐢靛悗锛岄鍏堣繘琛岃澶囧垵濮嬪寲锛岀劧鍚庣郴缁熶細鍦ㄦ瘡娆″惊鐜殑寮€濮嬮噸鍚?3璺疉DC閫氶亾锛岄噰闆嗗悇AI鐨勮緭鍏ワ紝骞堕€氳繃DMA淇濆瓨鍒癛AM涓璠8]銆傚湪涓柇鍑芥暟涓紝绯荤粺鏃堕挓姣?0 ms浜х敓涓€娆′腑鏂紝灏哻_task[TASK4].TaskStatus缃?ldquo;1”锛屽洜姝や富寰幆涓細棣栧厛鎵цTASK4锛欴isposalRoomEvent()锛岀▼搴忎細杩涜鎵嬪姩妯″紡鍜岃嚜鍔ㄦā寮忛€夋嫨锛岄粯璁ゆ儏鍐典笅涓鸿嚜鍔ㄦā寮忋€傚湪鎵嬪姩妯″紡涓嬶紝椋庢満浠ュ伐棰戝舰寮忚繍琛岋紝绯荤粺浼氭牴鎹墜鍔ㄨ緭鍏ュ€兼敼鍙樺悇鎴块棿鍙傛暟鍜岀郴缁熷弬鏁般€傝嚜鍔ㄦā寮忎笅锛岄鏈轰互鍙橀妯″紡杩愯锛岀郴缁熶細鏍规嵁鎴块棿娓╁害鍜屽帇鍔涙儏鍐碉紝鑷姩璋冭妭姘撮榾寮€搴﹀拰閫氶鏌滈閲忓ぇ灏忋€?涓诲惊鐜槸绯荤粺杞欢鏍稿績锛屼富瑕佽礋璐f暟鎹殑閲囬泦銆佸瓨鍌ㄤ互鍙婁笌姘旀祦鎺у埗绯荤粺鏁版嵁鐨勪氦鎹€備富寰幆鍏辨湁5涓换鍔1]锛?(1)TASK1鎵ц鐨勬槸涓插彛1鎺ュ彈鏁版嵁澶勭悊浠诲姟銆佸畬鎴愭埧闂存帶鍒跺櫒涓嶱LC涔嬮棿鐨勬暟鎹€氫俊锛?2)TASK2鎵ц鐨勬槸涓插彛2鎺ュ彈鏁版嵁澶勭悊浠诲姟锛屽畬鎴愭埧闂存帶鍒跺櫒涓庤Е鎽稿睆涔嬮棿鐨勬暟鎹€氫俊锛?3)TASK3鎵ц鐨勬槸涓插彛3鎴栬€匔AN鎬荤嚎鎺ュ彈鏁版嵁澶勭悊浠诲姟锛屽畬鎴愭埧闂存帶鍒跺櫒涓庨€氶鏌滀箣闂寸殑閫氫俊锛?4)TASK4鐨勪綔鐢ㄦ槸澶勭悊鎴块棿鍙傛暟鍜岀郴缁熷弬鏁帮紱(5)TASK5鐢ㄦ潵淇濆瓨鎴块棿鍙傛暟鍜岀郴缁熷弬鏁般€? 鍩轰簬PLC+STM32鐨勬櫤鑳藉疄楠屽SCADA绯荤粺锛屽埄鐢≒LC鍜屽彉棰戝櫒鎶€鏈皟鑺傞鏈洪鐜囷紝鑺傜害鑳借€楋紝鎻愰珮浜嗚澶囩殑绋冲畾鎬у拰鍙潬鎬с€傚埄鐢–AN鎬荤嚎鍜屼覆琛屾€荤嚎灏哠TM32銆丳LC銆佷紶鎰熷櫒銆佽Е鎽稿睆缁勬垚缃戠粶锛屽彲鏂逛究鍦扮洃鎺у疄楠屽璁惧鐨勮繍琛岀姸鎬併€傚彟澶栵紝鍒╃敤鏅鸿兘PID鎶€鏈皟鑺傜郴缁熼€?鎺掗浠ュ強鎴块棿娓╁害锛屾彁楂樹簡绯荤粺鐨勫姩/绋虫€佹€у拰鑷€傚簲鎬э紝淇濊瘉浜嗗疄楠屽娓╁害銆佸帇鍔涖€佹箍搴︾淮鎸佸湪涓€涓瀬灏忕殑娉㈠姩鑼冨洿鍐咃紝纭繚浜嗗疄楠屽鐨勬甯稿伐浣滅幆澧冦€? 閫氳繃浠ュお缃戝皢澶氫釜PLC鍜屼腑澶帶鍒跺宸ユ帶璁$畻鏈鸿仈缃戯紝瀹炵幇椋庢満鍜屽疄楠屽鐨勮繙绋嬬洃鎺т互鍙婃墜鍔ㄦā寮忓拰鑷姩妯″紡鐨勫垏鎹€傝绯荤粺宸插湪鏌愭捣鍏宠繍琛岋紝璋冭瘯缁撴灉琛ㄦ槑锛岀郴缁熻繍琛岀ǔ瀹氾紝鍚勯」鍙傛暟閮借兘婊¤冻瀹夊叏鎺у埗瑕佹眰锛屾瀬澶ч檷浣庝簡绯荤粺鐨勮兘鑰楋紝淇濊瘉浜嗗疄楠屽宸ヤ綔鐜鐨勫畨鍏ㄦ€у強鑸掗€傛€с€。
2024年智慧实验室整体规划解决方案[PPT]
![2024年智慧实验室整体规划解决方案[PPT]](https://img.taocdn.com/s3/m/356ea4b4b9f67c1cfad6195f312b3169a451eab3.png)
安防系统
摄像机 | 门禁 | 闸机 | 电子围栏
能源系统
照明 | 空开 | 电表 | 温度 | 湿度
资产管理
耗材管理 | 实验仪器 | 实验设备 危化品 | 试剂柜
三废系统
废气 | 废水 | 生物性废液 | 灭菌器
Lab
实验室当前不足
实验室意外近些年时有发生
系统林立各自为战
实验室安全监管难
能耗高居不下
部分接线示意图
楼 层:
配电井:
温湿度传感器:
电能表:
交换机:
大 功 率 设 备:
灯控面板:
空调面板:
边缘主机:
边缘模块:
AB线连接:
LoRa无线:
网 线:
摄像头:
人脸识别:
04
实验室智能控制
功能
实时监测
提供区域看板,实时监测各类设备的运行状态以及环境数据、能耗等
警报推送
提供窗口推送、短信、邮件多种警报推送方式,用最有效的方式提醒用户
填写实验
提交
分配/领取检验
任务书下达
分样
提交
保存草稿
驳回修改后提交
驳回
大屏、资产、运维
可视化大屏
运维管理
资产试剂管理
仪器设备管理
危险品管理
试剂耗材出入库
自动盘点
设备能耗
照明能耗
用水管理
用暖能耗
空调能耗
设备故障诊断
设备经验库
用暖能耗
设备报修、维修
工业互联网云平台
管理平台
监控大屏
LED大屏
手机APP
智慧实验室整体规划解决方案
01 需求分析
02 建设目标以及业务构架
实验室智能监控系统设计

中图分 类号 : T P 3 9 1 文 献 标 识 码 :A 文 章 编 号 :0 2 5 8 — 7 9 9 8 ( 2 0 1 4 ) 0 3 — 0 1 2 0 - 0 3
L a b o r a t o r y d e s i g n wi t h i n t e l l i g e n t mo n i t o r a n d c o n t r o l s y s t e m
整个 实验 室 系统安 全 可靠 地运 行 , 实 时检 测 、 监 控 实 验 室各项 环 境 参数 , 保 证 实验 室状 态 稳定 , 并 在 发 生 意 外 或者 系统 出 现故 障时 , 自动 采 取 一 定 的 保 护 措 施 , 设 计
Ke y wo r d s :S CAD A ;l a b o r a t o y ;mo r n i t o r i n g s y s t e m ;d i s t r i b u t e d
实 验 室 是 进 行 各 种 实 验 工 作 的 特 殊 环 境 。为 了保 证
统 的下位 机) , 主要负 责实 验室 参 数采 集和 控 制 ; 人 机 接 口H MI f H u ma n Ma c h i n e I n t e f r a c e ) , 主 要 负 责 提 供 良 好 的
Wu Da z h o n g ,S o n g J u n  ̄i
f J i a n g s u K e y L a b o r a t o r y o f Me t e o r o l o g i c a l O b s e r v a t i o n a n d I n f o r m a t i o n P r o c e s s i n ,N a n j i n g U n i v e r s i t y o f I n f o r m a t i o n S c i e n c e&
高校实验室智能化管理系统的设计

器模块、门禁报警器、电控锁模块和出门按钮模块 六个部分组成,门禁管理模块的结构如图 2 所示。
(1)电源模块:电源模块为整个智能门禁无线 节点供电,釆用的是 3.7V 的锂电池。
(2)RFID 读卡模块:RFID 读卡模块采用的是 NFC 读卡,NFC 是一种近距离无线通讯技术,负责 读取学生校园卡数据。
(2)在实验课上,老师通过人工方式了解学生
基金项目:成都市教育局第一批市属高校重点教学实验(实 训)项目(成教函[2015]11 号);成都农业科技职 业学院教改项目(JG2016-06)。
作者简介:文燕(1979-),女,讲师,主要研究方向:物联网应 用技术。
出勤情况,不仅费时,还容易出错。 (3)各实验室之间无法共享资源,实验室之间
共享资源率低,尤其是一些高端精密设备、跨实验 室设备使用程序复杂,导致某些设备的利用率不高。
(4)现有实验室门锁、窗帘和灯光都釆用机械 销匙和手动的方式开关,不能进行智能化的远程控 制,对于实验室的使用情况也不能够完整记录。
(5)在实验室环境监测方面,没有对环境实时 监测功能,对于实验设备的工作与存放环境不能够 及时检测或发出预警,从而给实验室造成毁灭性的 损坏。
102 2019 年第 1 期
第 46 卷第 1 期 Vol.46 No.1
时代农机
TIMESБайду номын сангаасAGRICULTURAL MACHINERY
2019 年 1 月 Jan. 2019
息化、智能化的大学。“智慧校园”建设的一个重点 就是高校实验室管理的信息化、智能化。
高校实验室智能化管理系统的设计目标是取 代高校实验室传统的管理方式,增加对实验室环境 实时监控和对实验室的智能控制等功能,让实验室 的管理智能化,简化实验室管理流程,提高实验室 管理的自动化、智能化水平和实验室的利用率,为 实现现代高校的“智慧校园”提供强有力的保障。
2016实验室智能中控系统
实验室智能中控系统二〇一六年一月目录1公司简介 (4)2需求分析 (4)3解决方案 (4)3.1实验室智能中控系统 (4)3.1.1智能中控系统物理应用拓补图 (5)3.1.2控制内容 (5)3.2实验室智能中控系统硬件模块功能 (6)3.2.1门禁控制模块 (6)3.2.2视频监控模块 (6)3.2.3 能耗监控模块 (6)3.2.4环境温湿度监测模块 (6)3.2.5电源控制模块 (7)3.3实验室智能中控系统软件模块功能 (8)3.3.1软件功能框图 (8)3.4课程管理 (8)3.4.1 实验课表导入 (8)3.4.2 实验课程调课 (8)3.4.3 课程冲突智能判断 (8)3.4.4 电子课牌显示 (8)3.4.5 课程分类查询统计 (8)3.5教学实验管理 (9)3.5.1 控制策略配置管理 (9)3.5.2 门禁、电源自动控制管理 (9)3.5.3 门禁、电源远程控制管理 (9)3.5.4 万能卡控制管理 (9)3.5.5自定义策略控制 (9)3.5.6视频监控 (9)3.5.7查询统计分析 (9)3.6卡片管理 (9)3.6.1卡片登记 (9)3.6.2卡片授权 (9)3.6.3卡片挂失 (9)3.6.4卡片禁用 (9)3.6.5智能补卡 (9)3.6.6卡片查询统计 (10)3.7控制管理 (10)3.7.1通讯协议解析 (10)3.7.2控制命令应答 (10)3.7.3当日课表下载管理 (10)3.7.4 实时同步课表下载管理 (10)3.8移动在线监控系统 (10)4售后服务 (11)4.1售后承诺 (11)4.1.1技术文件提供 (11)4.1.2产品质保 (11)4.1.3服务响应时间 (11)4.1.4服务方式 (11)4.1.5培训计划 (11)1公司简介是专注教育行业智能教学管理、智能实验室中控管理,集物联网、云计算技术、智能化产品研发、生产、销售、服务于一体的高新科技企业,凭借自主知识产权《实验室智能中控系统》、《智慧型实验中心管理平台》、《实验室综合管理平台》等智能化产品和严密的企业管理、专业的技术团队、严谨的管理团队、良好的企业形象、完善的售后服务体系,引领着一批又一批学校步入现代化智慧型教学的殿堂。
基于物联网技术的智能实验室安全管理系统设计与实现
基于物联网技术的智能实验室安全管理系统设计与实现智能实验室安全管理系统是基于物联网技术的新一代实验室安全管理系统,它结合了物联网技术、传感器技术和网络通信技术,通过实时监测、远程控制和智能决策等手段,提高了实验室的安全性和管理效率。
本文将介绍智能实验室安全管理系统的设计与实现。
一、系统需求分析智能实验室安全管理系统主要具备以下功能:1. 实时监测:通过物联网传感器实时监测实验室内温湿度、气体浓度等关键参数,以及设备运行状态,及时发现异常情况。
2. 报警功能:一旦监测到异常情况,系统能够通过短信、邮件等方式向管理人员发送报警信息,以便他们及时采取措施。
3. 远程控制:通过物联网技术,管理人员可以远程监控实验室的各种设备,并能够实现对设备的远程开关、调节等操作,提高实验室的管理效率。
4. 防止误操作:系统应具备对实验室设备进行权限管理的功能,只有具备相应权限的人员才能操作相应设备,防止误操作引发安全问题。
5. 数据记录与分析:系统需要记录和分析实验室的各项数据,如温湿度变化趋势、气体浓度变化等,以便于管理人员分析、查找异常原因。
二、系统设计1. 硬件设备:系统所需的硬件设备主要包括传感器、终端设备、服务器等。
传感器负责实时监测实验室中的温湿度、气体浓度等参数,将采集到的数据发送给终端设备。
终端设备负责接收传感器数据,并通过网络将数据发送给服务器。
服务器负责存储数据、进行数据处理与分析,并提供用户接口供管理人员远程监控与控制实验室设备。
2. 网络通信与数据传输:系统借助物联网技术,采用无线网络通信方式实现传感器与终端设备之间、终端设备与服务器之间的数据传输。
3. 数据存储与处理:服务器负责存储传感器采集到的数据,并进行相应的数据处理与分析。
同时,服务器还负责存储设备操作日志、报警日志等信息,以便管理人员查看和分析。
4. 用户接口:系统应提供用户友好的界面,方便管理人员进行远程监控和控制。
界面应具备实时数据显示功能、设备开关功能、权限管理功能等。
国家实验室智能控制系统多轴运动板手册说明书

Motion ControlNational Instruments548C o n t e n t s a n d O v e r v i e wM o t i o n C o n t r o lContentsMotion Products Selection Guide ..............................550Tutorial . (551)Understanding Motion Basics........................................................551Stepper and Servo Motors..............................................................552Microstepping in Stepper Motor Systems ....................................553Feedback for Closed-Loop Control ................................................554Motion Operation Modes. (555)SoftwareLabVIEW Motion Virtual Instruments............................................556Windows Software for Motion Control..........................................557C Programming for Motion (557)HardwareFlexMotion High-Performance Boards ......................................558Specifications..................................................................................561ValueMotion Boards ....................................................................562Overview..........................................................................................562Stepper Boards................................................................................564Servo Boards ..................................................................................565Specifications..................................................................................566PeripheralsUMI Wiring Interfaces ....................................................................567nuDrive Power Drivers.. (568)Motion ControlOverviewOverviewNational Instruments Phone:(512)794-0100•Fax:(512)683-8411•****************• 549Advanced Motion Performance Using PC-Based StandardsMotion control on the PC is the new standard for intelligent motion integration. The combination of advanced performance, real-time, embedded CPU-based controllers, PCI bus throughput, and Windows graphical programming make PC-based motion the correct choice for powerful, easy-to-use solutions. Motion control on the PC has moved beyond ASCII text programming to interactive graphical interfaces and icon programs on multiprocessor plug-in controller boards, which offload motion tasks from the host PC. These advantages provide seamless integration of motion, vision, data acquisition, and instrument control functions in one system developed using the same software with compatible tools and backed by a uniform worldwide sales and support network. National Instruments motion products are excellent system solutions; they are unsurpassed when used in conjunction with vision and other applications.Motion Products forOEM ApplicationsOEMs need performance, reliability, flexibility, lower cost, and premium support in their motion control products. National Instruments motion control products exceed OEM expectations in all four areas; and as a result, are making equipment manufacturers successful worldwide. Our ValueMotion and FlexMotion products are performance motion controllers with the correct level of compatibility for all OEM applications. Our motion products are manufactured and tested to exceed ISO-9000 quality standards and CE conformance standards.The National Instruments Sales, Support, and Engineering team works closely with OEMs to provide product feature and function enhancement. Our sales people are engineers, trained to make your PC-based measurement and automation application successful.For OEM support well beyondthe industry standard, contact oneof our motion product businessdevelopment managers to discussyour application requirements.What to Look for inMotion Control SystemsA motion control system must make integration of motioncomponents simple while maintaining the performance andflexibility of each component. National Instruments hasdeveloped a premium offering of motion products, and softwaredevelopment tools designed for integration. The connectivitybetween National Instruments motion system componentsfollows industry-standard specifications at each point – controllerto driver, driver to motor, and software to application. Thisconsistency makes your choice of any individual product, or anentire solution, the right choice.To ensure rapid system development, use motion hardwareand LabVIEW graphical programming software for Windowsfrom the same company that designed these tools to worktogether – National Instruments. Spend more time operating yourmotion system and less time figuring out how to configure it. Oursurprisingly simple– yetpowerful – operatorsoftware panels makeit easy to build andrun motionsystems.Motion Control550National InstrumentsPhone:(512)794-0100•Fax:(512)683-8411•****************•Motion ControlTutorialTutorialNational InstrumentsPhone:(512)794-0100•Fax:(512)683-8411•****************•551IntroductionMotion control is a broad term that can be simply defined as the precise control of anything that moves. National Instruments motion control products include PC-based controller boards,wiring, and connectivity devices, power driver units, and software tools and applications. These motion products are optimized for use in test and measurement automation,laboratory automation, industrial control, robotics, material handling, integrated machine vision, CNC machine tool control,and OEM motion applications.National Instruments motion products are designed for powerful yet simple application in both point-to-point and advanced multiaxis coordinated motion systems. The full complement of software tools includes – 32-bit DLL and drivers for C/C++/Visual Basic and LabWindows/CVI in Windows NT/98/95. In addition, the software tools include ready-to-run applications for out-of-the-box motion operation and VIs for graphical object-oriented motion programming with LabVIEW and BridgeVIEW. As a user or integrator of motion control products, it is easy to achieve optimal results and leverage off new standards in motion programming with our PC-based motion control products.PC-Based Architecture for Servo and Stepper ControlServo and stepper motors are widely used for position and velocity control in a variety of electromechanical confie of the PC as an operator interface (HMI), local control host,and remote system controller platform is widely accepted andUsing an intelligent real-time controller board for motion in the PC accomplishes two major objectives in integrating motion,vision, and data acquisition. The first is offloading low-level axis control, closed-loop control, and multiaxis coordination from the host PC; the second is providing a fast, flexible, industry-standard PC-based platform for integrated motion functions.Understanding Motion BasicsA motion control system consists of five major components – the mechanical device being moved, the motor (servo or stepper)with feedback and motion I/O, the motor driver unit, the intelligent controller , and the programming/operator interface software. While solutions exist for a stand-alone distributed motion control and closed architechture motion controllers from other vendors, it is clear that PC-based automation, as well as a focus on PC-based motion solutions and open standards for hardware and software components, is fueling growth in this area.Understanding the requirements of your motion system and the basic technologies for motion are key in selecting products for your application. This tutorial covers motion controller board architecture, servo and stepper motors, motor drivers, feedback for closed-loop control, motion control modes, motion I/O, and industry-standard signals for third-party motion component connectivity. The National Instruments motion products access and control these technologies while emphasizing connectivity between components and graphical tools for development.Motion ControlMotion Control TutorialNational InstrumentsPhone:(512)794-0100•Fax:(512)683-8411•****************•552T u t o r i a lcounter/timer capabilities differently, providing a choice of general-purpose or high-performance solutions. All National Instruments motion controller boards are designed for integrated operation of their dual processor configuration in the LabVIEW and BridgeVIEW graphical programming environments, as well as with LabWindows CVI, C/C++, Visual Basic, and other major development tools.Stepper and Servo MotorsStepper and servo motors are both generic terms covering many technologies. Stepper motors are discrete motion devices that move to positions that relate directly to the number of input control pulses, at a velocity that relates directly to the pulse rate. Servo motors are continuous motion devices that use feedback signals to provide position and velocity control in a closed-loop environment.open-loop servo motor rotates or moves uncontrolled as long as power is applied to it. By implementing a control loop around a servo motor, using a PID controller and feedback from an encoder device mounted on the motor , it is possible to accurately and reliably move to the desired position at well controlled velocities following user-specified motion trajectory paths.All servo motor systems use a motor driver power unit to control the voltage and current that flows through the motor armature and motor windings. The basic principle of motion in servo motors is based on the flow of current through a wire coil,generating a magnetic field that reacts with permanent magnets in the motor to cause attraction and repelling forces that cause movement.M o t i o n C o n t r o lMotion ControlTutorialTutorialNational InstrumentsPhone:(512)794-0100•Fax:(512)683-8411•****************•553DC Brush Servo MotorsThe DC brush servo motor , the simplest servo motor design, is cost effective for its performance and power in general-purpose servo applications. DC brush servo motors are self-commutating motion devices that rotate continuously while current is applied to the motor brush contacts. The current flows through the brushes to the armature and then through the motor coils,creating the magnetic forces that cause motion. Changing the direction of current flow through the motor reverses the direction of rotation. Encoder feedback to the motion board is required to provide accurate control of position and velocity with a DC brush servo motor . Encoders are mounted on the shaft of a motor or on the coupled mechanical unit as a linear or rotary device, directly translating movement into feedback data.Stepper MotorsStepper motors rely on the principle of commutation or alternating magnetic forces, to provide predictable controlled motion. Commutation in motion applications is the controlled sequencing of drive currents and voltages in motor coil windings to provide torque and therefore, movement. In a stepper motor system, individual step signals from a motion control board are converted into an energizing pattern for the motor coils.As the commutation pattern varies, the motor moves from one discrete position to another . When the pattern is held in a single state, the stepper motor holds its position with a known torquefull-step locations of a stepper motor the basic resolution of the motor to as 1.8 degree/step motor revolution per minute (rpm).Microstepping in Stepper Motor SystemsAdvanced stepper motor driver technology provides a capability known as microstepping. Microstepping is based in the stepper motor driver component. It provides for the predetermined subdivision of each full step into microsteps by proportioning the currents in each coil to produce carefully balanced electromagnetic locations between the full steps. To quickly review the technology of microstepping, sine and cosine proportioned values of current are carefully sent to particular motor coils, resulting in the simulation of interim microstep locations. The advantage of microstepping is multiplication of the number of steps per revolution, thereby increasing the resolution of a stepper motor system. Additionally, because more steps are provided, the movement between steps is smaller and the resulting step motion is typically smoother. Microstepping technology is widely accepted and fully implemented in all National Instruments stepper control and driver products.Because stepper motion is controlled by the generation of step pulses from the controller board, it is clear that the stepper motor controller must carefully control the number of pulses (position), the frequency of the pulses (velocity), and the rate of change of frequency (acceleration/deceleration). This process is referred to as trajectory control, where the trajectory is the predictable path of speed changes that the motor undergoes as it moves from its starting position to its desired end position through its profile or as it runs continuously at desired velocities.Motion ControlFigure 3. Stepper Motor Controllers and nuDrives Support MicrosteppingMotion Control TutorialNational InstrumentsPhone:(512)794-0100•Fax:(512)683-8411•****************•554T u t o r i a lFeedback for Closed-Loop Motion ControlMotion systems use feedback signals to provide closed-loop control of position and velocity. Although feedback is optional in stepper motor systems, servo motor systems require feedback for proper control, operation, accurate motor position, and velocity maintenance. The most common feedback used with intelligent motion control boards is quadrature incremental encoder feedback.Feedback devices provide signals that convey position and velocity data to a motion controller . The signals are converted on the motion controller into count values that correspond to position. Position values, measured over fixed periods of time,Quadrature Encoder FeedbackQuadrature incremental encoders are optoelectronic feedback devices that use a patterned optical mask and optointerrupter-LED source/transistor detector pairs to generate two digital output waveforms, where the pulse location of the waveforms are 90 degrees out of phase with each other . This 90 degree phase difference in the waveforms (quadrature) is used by the encoder input circuitry to enhance the resolution of the position count value and to determine the direction of motion. If the A phase signal leads or comes before the B phase signal, then motion direction is considered clockwise or forward. For the opposite phasing, the direction is considered counter-clockwise or reverse.The quadrature encoder input circuits decode the phasing of the signals and count the quadrature pulses to derive position information. The position count value is maintained in a 32-bit register , providing more than 4 billion position locations.The detector circuits for encoder feedback on the motion controller boards incorporate digital signal filtering techniques to avoid deception by noise pulses or erroneous data that does not fit the quadrature model.Analog FeedbackAlthough quadrature encoder feedback is the most common type used, you can use analog feedback to provide the same position and velocity data. If an analog input signal is measured and converted by an ADC on the motion board, the analog value generates a corresponding digital value. This value is then used as position data and the overall range of available positions is determined from the resolution of the ADC. Analog feedback,.acceleration phase. Switching power supplies typically suffer from output shutdown when the motor driver attempts to draw the extra current that it requires during acceleration.National Instruments motion control products provide two different solutions for motor driver configuration. The nuDrive units are fully enclosed motor driver subsystems with a single cable connection from the motion control board. nuDrives include the appropriate motor driver types per axis, for small DC brush type servo or stepper motors, along with bulk DC power supplies specifically designed to provide the voltage and currents demanded by these drivers. Additionally, nuDrive units incorporate all of the necessary low-voltage power supplies,wiring connectivity, signal conditioning, and monitoring that are appropriate for motion system integration with encoders, limit switches, and other motion I/O devices.If nuDrive voltage and current capabilities do not meet the requirements of a specific motor, it is simple to connect to third-party motor drivers using a universal motion interface module (UMI).M o t i o n C o n t r o lMotion ControlTutorialTutorialNational InstrumentsPhone:(512)794-0100•Fax:(512)683-8411•****************•555The UMI accepts the single cable connection from the motion controller board and breaks out the motor , encoder , limit, and motion I/O signals on a per-axis basis into separate pluggable screw terminal connections. The UMI provides all of the onboard signal conditioning and monitoring found in a nuDrive. Because the motion controller board outputs industry-standard signals,through the UMI, this configuration provides for limitless connectivity. You can use any size or type of motor , as long as the associated driver unit is compatible with the standard control and feedback signals.Motion Operation ModesPC-based servo and stepper controller boards offer a wide variety of operation modes. The modes listed provide operational features and functionality at a high level, making it simple to solve motion applications. Access these standard operation modes in a fully integrated motion system with powerful software tools. Easy-to-use Windows software, drivers, and Motion VIs make mode operation, parameter loading, and status display a snap. Motion is controlled in absolute or relative mode, and you can use all position breakpoint, position value capture, and status functions.Point-to-Point Position ModeIn point-to-point mode, each axis is indepen-dently programmed with motion profile parameters. Values for velocity, acceleration,deceleration, S-curve, and target position are loaded prior to a start command.Linear Vector Interpolation ModeIn linear vector interpolation mode, you canassign axes to a vector space; motion control ofthe axes accurately follows the desired vector path, at the programmed vector velocity,acceleration, and deceleration values. Vector spaces can contain one, two, or three axes and you can synchronize multiple vector spaces. You can also sequence and blend motion profiles for smooth transition.Electronic Gearing, Master/Slave ModeIn electronic gearing and master/slave modes,you can configure any axis or axes to run at a gear ratio to any master axis. The master axis could be encoder feedback only, or a motor under closed-loop control. These powerful gearing modes are used for coil winding, flying cutoff, rotating knife, high-speed labeling, and all other geared and slaving applications.Circular, Spherical, and Helical Interpolation ModesIn these modes, the motion parameters describing arcs, vector velocity, accel/decel,radius, start angle, and target angle are loaded before the move is started. For helicalinterpolation, the target height (Z) is also loaded and for spherical interpolation, two start angles and two target angles are specified. Motion will accelerate to the vector velocity while following the path indicated by target angles and height.S-curve on a motion profile is controlled by separate accel-eration and deceleration smoothing (jerk-limit) factors.Velocity Profiling ModeThis mode provides a user-programmed acceleration to a desired target velocity that is accurately maintained until a new target velocity value is loaded. You can change velocity on the fly.Jog Modeparameter is updated on the fly or a stop command is issued.Registration ModeRegistration is used to capture the exact position when the high-speed capture input signal transitions. The high-speed capture eliminateslatency and provides precise motor control athigh velocities. High-speed capture input position values are automatically combined with a registration move; and the new motion can be completed autonomously.Homing ModeHoming is accomplished through the Findindex (marker) pulse of the feedback encoder device, and then moves to the index offset position. Homing mode is used during system setup and initialization.Motion Control。
基于JavaWeb的高校实验室智能管理系统的设计与实现

基于JavaWeb的高校实验室智能管理系统的设计与实现杨远新崔忠伟刘卓陈静杨成摘要:在传统实验室人工管理模式下,针对管理的速度慢、效率低和数据冗余量大等问题,提出了基于JAVA Web的B/S结构的高校实验室智能管理系统设计方案。
在设计过程中,通过采用JSP技术、数据库技术、网络架构等多领域知识,实现了实验室管理的信息化建设、智能化管理和快速维修功能。
关键词:JAVA;Web;B/S;MYSQL;实验室智能管理系统TP393 :A :1009-3044(2017)31-0074-021 概述随着高校建设的不断发展和壮大,高校实验室管理显得尤为重要。
高校日常管理工作中,实验室管理具有数量大、持续时间长的特点。
目前,高校建设和管理工作[本文来自于]的逐步改革,随之而来的实验室的管理也发生了巨大的变化,传统的实验室管理模式的弊端逐渐暴露无遗,传统的实验室人工管理模式已经不能适应高等教育对于培养实践创新型人才的需要。
然而,如何使实验室管理达到一个新的水平,提高实验室管理水平和设备资源可以得到有效利用,以减轻实验室管理人员的工作量,是当前实验室信息化建设遇到的一个亟待解决的问题之一。
针对以上问题,我们将计算机硬件技术、计算机软件技术、计算机网络技术、数据库技术等与相应的高校管理体系相结合,预开发一套涵盖了实验室的资源管理功能、数据管理功能、实验室预约管理功能和基本的查询统计功能的高校实验室智能管理系统。
极大地提高了实验资源的利用率和实验教学效果,节约了实验室管理维护成本,实现了实验室综合管理的跨越式发展。
2 系統功能需求分析系统采用现代软件技术,以便更科学、规范的实现实验室信息化、现代化、智能化管理,提高各高校数字化建设水平,以其改变过去学生进行实验和实验室管理的方式,提高学习资源的利用率。
同时,本系统最终要实现在机房正常运转前提下,对课内上机考勤自动化,快速有效化管理,课外上机科学计费化管理,设备更新明确合理化管理。
智能实验室管理系统及其应用
智能实验室管理系统及其应用随着科技的快速发展和应用领域的扩展,实验室管理面临着诸多挑战。
传统的实验室管理方式已经无法满足现代化实验室的需求,对于提高实验室的工作效率,确保实验数据的准确性和可追溯性,智能实验室管理系统应运而生。
智能实验室管理系统是指通过计算机网络、物联网和人工智能等相关技术手段将实验室内的设备、仪器、设施以及实验员工进行数据连接和信息交换,并进行有效的整合和管理,以提高实验室的运作效率和数据的可管理性。
智能实验室管理系统可以实现实验室设备的远程监控和智能控制,实验数据的实时录入和自动整合,以及实验员工的工作安排和资源调配。
在实验室内部,系统通过传感器、控制器等设备将各种仪器设备和设施接入网络,实现数据的实时监测和仪器的自动控制。
同时,系统可以通过智能算法进行数据的分析和判断,帮助实验员工更好地理解实验结果和推测潜在问题。
智能实验室管理系统的应用范围涵盖了诸多领域,如化学、生物、医学、环境等各类实验室。
在化学实验室中,系统可以帮助实验员工自动调配试样、计算化学方程式、生成报告等工作,提高实验效率和数据可靠性。
在生物实验室中,系统可以帮助实验员工进行样本管理、测量实验数据、分析实验结果等工作,提供实验参考和技术支持。
在医学实验室中,系统可以协助实验员工进行样本分析和病患数据管理,提供准确和及时的诊断结果。
在环境实验室中,系统可以帮助实验员工进行空气质量监测、水质检测等工作,提供科学依据和环境保护建议。
智能实验室管理系统的应用还可以延伸到科研机构、高校实验室和企业研发中心等科技创新单位。
系统的使用可以加强研究团队之间的合作和信息共享,提高研究成果的传播和转化效果。
同时,系统的应用还可以实现对研究设备和资源的统一管理和调配,提高研究人员的工作效率和资源利用效益。
然而,智能实验室管理系统的应用仍然面临一些挑战。
首先,系统的建设和应用需要投入大量的资金、人力和技术支持。
其次,系统的操作和维护对实验员工的技术要求较高,需要进行专门的培训和指导。
《实验室自动化系统》课件
蛋白质研究
自动化系统在蛋白质组学研究中能 够实现高通量筛选、分离纯化、鉴 定等功能,加速药物研发和疾病研 究。
微生物鉴定
自动化系统能够快速、准确地鉴定 微生物种类和菌株,为疾病诊断和 治疗提供有力支持。
化学实验室自动化系统应用案例
01
02
03
合成化学
自动化系统能够实现高效 、安全的化学合成,降低 人工操作风险,提高合成 效率和产物纯度。
传感器技术
总结词
传感器技术是实现实验室自动化系统的重要技术之一,它能够实时监测实验过 程中的各种参数和变化,并将数据传输到控制系统进行分析和处理。
详细描述
传感器技术包括温度、压力、流量、液位、湿度等传感器,它们能够实时监测 实验设备的运行状态和实验过程的变化情况,为控制系统提供准确的数据支持 ,保证实验的准确性和可靠性。
数据处理
对采集的实验数据进行处理和 分析。
结果输出
将处理后的实验结果输出,并 形成报告。
03
实验室自动化系统的技术实 现
自动化控制技术
总结词
自动化控制技术是实现实验室自动化系统的关键技术之一, 它能够通过预设的程序和指令,自动完成实验过程中的各种 操作和控制任务。
详细描述
自动化控制技术包括可编程逻辑控制器(PLC)、分布式控 制系统(DCS)和工业控制系统(ICS)等,它们能够实现实 验设备的自动化控制,提高实验效率和精度,减少人为误差 和操作失误。
04
实验室自动化系统的优势与 挑战
实验室自动化系统的优势
提高工作效率 保证实验精度 提高实验一致性 降低实验成本
自动化系统能够快速、准确地完成实验操作,减少人工操作的 时间和误差,提高工作效率。
智慧实验室解决方案pptppt

自动化和智能化
智慧实验室能够实时处理和分析实验数据,快速得到实验结果,提高科研效率。
提高科研效率
通过优化实验室运营和管理,智慧实验室可以大幅度降低人力、物力和财力的投入,实现更高效、更经济的科研。
降低成本
发展趋势
随着科技的不断进步,智慧实验室的发展前景非常广阔,未来将会有更多的科研机构和企业采用智慧实验室方案,以提升科研效率和降低成本。
市场规模将持续扩大
随着实验室行业的发展,智慧实验室解决方案市场规模将持续扩大,产业将更加成熟。
产业发展的前景和展望Fra bibliotek技术创新将成为核心竞争力
随着技术的不断发展,技术创新将成为智慧实验室解决方案的核心竞争力,企业需要不断加强技术研发和创新投入。
行业整合将加速
未来智慧实验室解决方案行业整合将加速,将出现更多的兼并与收购,以提高企业竞争力。同时,行业标准也将逐步完善,为产业发展提供更好的规范和支持。
项目目标
1. 实验流程优化
3. 实验室安全管理
企业背景
解决方案
2. 数据分析与预测
01
02
03
04
05
06
3. 实验室远程监控
项目目标
通过智慧实验室解决方案,提高检测效率、降低成本并提高检测结果的准确性。
1. 样品管理
通过样品智能化管理系统,实现了样品的自动化登记、分配、跟踪和报告生成,提高了检测效率。
远程维护
通过远程协作技术,实现不同地域的科研人员之间的协作交流,提高科研效率。
远程协作
远程管理模块
04
智慧实验室解决方案的实施方案
准备阶段
在准备阶段,我们需要进行需求调研、方案设计、资源调配和预算编制。这个阶段通常需要1-2个月的时间。
智能系统设计-PPT课件
台,如java、c++)
2
智能系统—— 从人工智能到机器学习
早期的人工智能应用的典型例子
博弈系统 专家系统 定理机器证明系统 封闭环境下的问题求解系统
早期的人工智能研究的共同特点
基于逻辑或形式系统、封闭性、强先验知识和充分的 数据、自顶向下的设计模式、固化的“智能”
3
智能系统—— 从人工智能到机器学习
智能系统一般架构
数据预处理 特征选择和抽取
核心处理(聚类、 分类、排序、回归和 优化等等)处理 结果输出以及用户 接口
7
课程设计题目一
微博文本的倾向性分析系统
任务描述:基于大量实际的微博文本,分析社会群体对于
乏意义)
特定话题的倾向性。倾向性可规定为肯定、否定和中立等。
注:分析所以来的微博文本应具有必要的规模(否则结论缺
5
智能系统的基本功能元素(续)
7 解空间优化(解析法:线性规划、凸规划和半正定规划等)
(非解析法:进化算法、模拟煺火和蚁群法等) 8 模型选择(AIC、BIC、MDL和交叉验证等) 9 Ranking(排序):统计方法、矩阵方法 10 Online (在线)学习 11 强化(Incremental)学习 12 半监督学习 13 统计推断:图模型(隐马尔科夫模型、条件随机场、贝叶 斯网络等)、高阶依赖性分析和其他常用的统计模型
8
课程设计题目二
广告推荐系统
任务描述:在购物网站或微博等社会网络上实现有针对
性的广告推荐。要求系统尽可能地协调用户的兴趣和网 站的商业利益,在不明显降低用户体验的前提下实现商 业利益最大化。 基本参考:
Introduction to Computational Advertising,
QCX——以质量管控为核心的智能化实验室系统

Q C X—以质量管控为核心的智能化实验室系统申金永(艾法史密斯(中国),北京100027 )中图分类号:TQI72.11 文献标识码:B文章编号:1671—8321 (2021) 06—0119—020引言2021年是“十四五规划”开局之年,“规划”中明确提出把“制造强国,质量强国”作为本阶段传统工业的目标,政府也在规划中强调了基础「.业的产业升级,将“智能制造和绿色制造”结合,根据不同产业进行布局。
作为世界水泥生产大国,“提高质量,降低能耗”仍是我国当前各水泥生产企业立身之本,“绿色发展,智能制造”则是实现水泥工业碳减排的必经之路。
水泥产品是关乎民生安全的大宗物资,其质量的优 劣对社会的影响和企业的生存都至关重要,以质量为核 心的生产理念也永远不会过时。
国标对水泥产品和熟料 的各项指标都有明确要求,尤其是强度要求和主要化合 物含量比例也是水泥生产企业的质量标准的不可逾越的 红线。
现阶段各大水泥集团都在积极部署企业的“智能 化生产”,在根据自身的区域优势和生产特点,编制有关 “智能化生产”路线图,其中“智能化实验室”即是质量 控制的需求,也是智能化工厂的基础。
艾法史密斯全自动实驗室图1水泥生产线典型取样点Samplingocxy自动采样QCX/RoboLabocx/实验親统♦分折和样系统驱动.分析设备秘洗进的势曲贮,大子年保符射柄饮平台必通置该*系统图2艾法史密斯QCX’系统软件架构1艾法史密斯Q C X1组成水泥生产工艺是结合物理变化和化学反应的生产 过程,为了生产出质量可靠的产品,就需要原料的配料精 准,燃料的合理搭配,操作的参数稳定。
艾法史密斯以现 代化计算机信息技术和质量分析手段为基础,针对水泥 生产工艺需求,于上世纪七十年代初研发了 “质量分析控制专家系统”(QCX«),主要包括取样和送样系统、实验 室自动分析系统、原燃料配料软件、系统管理和输出软 件。
水泥生产线典型取样点见图1,艾法史密斯QCX•系统软件架构见图2。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
五、运行安全检测系统 通过后台数据分析后进行 终端显示: 1、人机触摸显示装置
环境等级评定显示 风机控制功能
2、中央控制系统大屏 环境等级评定显示 风机控制功能 实时数据显示
控制后台数据展示
2、音响系统 教学系统配备专业的 多媒体音响系统。 具备多路分频输入:
1、教师授课话筒
2、多媒体播放系统课ຫໍສະໝຸດ 件3、传话器配备带无线功能的传话 器,方便老师授课
4、监控摄录系统
在系统每一套实验台上方 安装一组摄像头,具备无 线传输功能,与多媒体组 成无线传输的实时放映。 有利于老师示范操作过程, 学生实时观看模拟,学生 操作实时纠错,及时发现 实验中的问题(特别是安 全)
实验室
智能实验教学、排风和安全系统
系统组成:
一、实验室多媒体系统 二、安全及报警系统 三、通风系统 四、人机智能交互平台 五、运行安全检测系统
一、实验室多媒体系统
区别于普通教学,适用于实验教学的多媒体系统:
1、短距视频系统(解决因设备占用空间后剩余空间不足问题) 2、音响系统(解决实验室噪音对于教学的影响) 3、配备便携式传话器 4、监控摄录系统(实时演示、图像示范教学、监控学生实验状态)
上位机显示
有害气体传 感器 现 场 风 机 现场控制主板 感温感烟探 头
气体检测部分 气体传感器:气体传 感器采用能够检测多种气 体的比较综合的模组;具 备检测甲醛、二氧化碳、 甲苯、硫化物等气体。
控 制 板 4-20mA 检 测 传 感 器
二、安全及报警---声光报 警
感烟感温火灾探测器是 由烟雾传感器件和半导体温度 传感器件从工艺结构和电路结 构上共同构成的多元复合探测 器。使得该款复合探测器能够 对国家标准试验火SH3(聚氨 酯塑料火)和SH4(正庚烷火)的 燃烧进行探测和报警。 利用起火时产生的烟雾能够改 变光的传播特性这一基本性质 而使其动作。
控 制 板 继电器输出
感 烟 感 温
二、安全及报警---紧急 喷淋
紧急冲淋、洗眼,操作 简单快捷,全身防腐、防堵 塞。
二、安全及报警---必须 的安全警示标识
三、通风系统
三、通风系统
完整的化学实验通风系统
通风柜(手)
通风管道(肌肉及血管) 通风机(心脏)
酸洗塔 安全达标排放
四、人机智能交互平台 分为数据处理与控制系统分为两部 分: 1、数据分析处理系统 数据处理系统主要将传感检测部分 采集到数据通过运算分析,对室内 环境做出一个评定等级、主要有优、 良、差等三个环境等级。 2、排风柜风机控制控制系统 通过在屏幕上显示数据,启动和停 止风机电源功能 3、上位机系统 在每一间实验室配备有一套数据分 析控制系统,同时将所有数据传送 至上位机中控机组,通过中控机组 能够实现在中控室查看每一间实验 室的运行状态及过程。
二、安全及报警----有害气体报警系统
有害气体报警系统主要负责采集实验室内部实施数据、控制实验室通风设备、 通过后台数据处理分析对实验室内有害气体、温度等综合环境做出相应的等 级评定。
报警 系统
气体检测装置 温度&烟气浓度感应装置 数据处理&控制系统 显示系统
有害气体报警系统结构总图
现场显示
数据处理
实验室教学多媒体系统结构图
音响
音频处理 (分频)
传话器(无线)
荧 幕
投影仪
多 媒 体 主 机
摄像头(无线)
音响
多媒体无线AP
1、短距视频系统
系统配备短焦投影机(带无线传输功能) 解决实验室剩余空间不足的问题。 短焦投影机具有很短的透射比,即投 影机到屏幕之间的距离与屏幕尺寸之比。 投影领域的一大进步,投影仪从离屏幕表 面几英寸开外之处即可将画面投射到大屏 幕(70 英寸或以上)上。在投影机前走 动而挡住屏幕上画面的情况将不复存在。 借助超短焦投影仪,可在任何房间,教室 和会议室内观看明亮且色彩丰富的大屏幕 影像。