DS1302时钟芯片中文资料
ds1302时钟芯片介绍

ds1302时钟芯片介绍
DS1302是由美国公司Maxim Integrated(原先Dallas Semiconductor)生产的一种时钟芯片。
它是用于计时和日期记录的低功耗时钟芯片,可以广泛应用于计算机、家用电器、电子设备和工业控制等领域。
DS1302采用SPI接口与微控制器进行通信,采用电池供电,具有低功耗特性。
它内部包含了时钟计数器、时钟发生器、RAM和控制逻辑等核心部件。
DS1302具有精确的时钟计数器,可以提供准确的时间和日期记录。
它采用32.768kHz的晶体振荡器作为时钟源,可以提供精确至秒级别的计时功能。
同时,它还具有256字节的RAM 用于存储用户数据和设置参数。
DS1302支持BCD码和二进制码两种时间格式,并可以进行自动切换。
除此之外,它还具有闹钟功能,可以设置多个闹钟,同时支持中断输出,可通过外部中断引脚触发。
DS1302有一套完善的控制指令集,通过SPI接口与微控制器进行通信。
微控制器可以通过发送指令来读取和写入时钟和RAM中的数据。
此外,它还具有写保护功能,可以设置只读或只写模式,保护计时和日期数据的安全性。
DS1302具有多种封装形式,如DIP、SOIC和TSSOP等,方便不同应用场景的安装和布局。
此外,它还具有宽工作温度范围和抗辐射等特性,适应各种恶劣环境下的工作。
总结起来,DS1302是一种集计时、日期记录和闹钟功能于一体的低功耗时钟芯片。
它准确可靠、功能丰富、易于使用,可广泛应用于各种电子设备和工业控制系统中。
DS1302中文手册
DS1302中文手册DS1302 是一款高性能、低功耗的实时时钟芯片,被广泛应用于各种需要准确计时的电子设备中。
一、DS1302 的基本特性1、实时时钟功能能够精确记录年、月、日、时、分、秒等时间信息。
2、低功耗设计在电池供电的情况下,仍能保持长时间的计时准确性。
3、数据存储具备 31 字节的非易失性静态 RAM,可用于存储一些关键数据。
4、简单的接口通过串行接口与微控制器进行通信,易于集成到系统中。
二、DS1302 的引脚功能1、 Vcc1 和 Vcc2Vcc1 是主电源引脚,Vcc2 是备用电源引脚。
当主电源正常供电时,芯片使用 Vcc1 供电;当主电源断电时,自动切换到 Vcc2(通常为电池)以保持时钟运行。
2、 GND接地引脚。
3、 CLK时钟输入引脚,用于同步数据传输。
4、 I/O数据输入/输出引脚。
5、 RST复位引脚,高电平有效。
三、DS1302 的通信协议DS1302 采用串行通信方式,通信数据以字节为单位进行传输。
1、起始位在每个字节传输开始时,RST 引脚被置为高电平,启动通信过程。
2、控制字节首先发送一个控制字节,用于指定后续操作是读操作还是写操作,以及要操作的寄存器地址。
3、数据字节根据控制字节的指示,接着传输数据字节。
4、停止位在传输完一个字节的数据后,将 RST 引脚置为低电平,结束本次通信。
四、DS1302 的寄存器1、时钟/日历寄存器包括年、月、日、时、分、秒等寄存器,用于存储时间信息。
2、控制寄存器用于设置时钟的工作模式,如是否开启振荡器、是否进行写保护等。
3、充电寄存器用于控制备用电源的充电特性。
4、 31 字节的 RAM 寄存器用于用户自定义数据存储。
五、DS1302 的初始化与设置在使用 DS1302 之前,需要进行初始化设置,包括设置初始时间、开启振荡器、关闭写保护等操作。
1、写入初始时间通过串行通信将准确的初始时间写入到相应的时钟/日历寄存器中。
2、开启振荡器将控制寄存器的相应位设置为 1,使振荡器开始工作。
时钟芯片DS1302中文资料
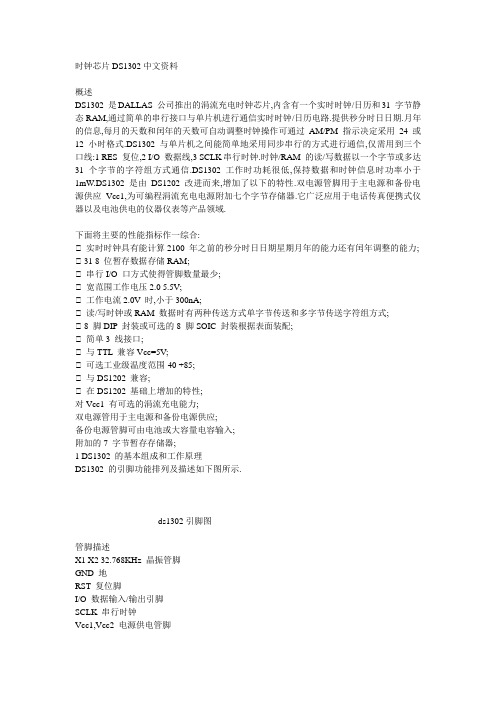
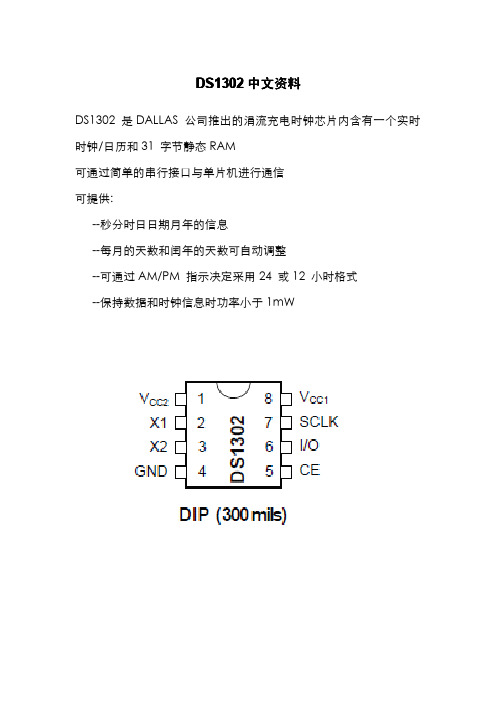
时钟芯片DS1302中文资料概述DS1302 是DALLAS 公司推出的涓流充电时钟芯片,内含有一个实时时钟/日历和31 字节静态RAM,通过简单的串行接口与单片机进行通信实时时钟/日历电路.提供秒分时日日期.月年的信息,每月的天数和闰年的天数可自动调整时钟操作可通过AM/PM 指示决定采用24 或12 小时格式.DS1302 与单片机之间能简单地采用同步串行的方式进行通信,仅需用到三个口线:1 RES 复位,2 I/O 数据线,3 SCLK串行时钟.时钟/RAM 的读/写数据以一个字节或多达31 个字节的字符组方式通信.DS1302 工作时功耗很低,保持数据和时钟信息时功率小于1mW.DS1302 是由DS1202 改进而来,增加了以下的特性.双电源管脚用于主电源和备份电源供应Vcc1,为可编程涓流充电电源附加七个字节存储器.它广泛应用于电话传真便携式仪器以及电池供电的仪器仪表等产品领域.下面将主要的性能指标作一综合:实时时钟具有能计算2100 年之前的秒分时日日期星期月年的能力还有闰年调整的能力;31 8 位暂存数据存储RAM;串行I/O 口方式使得管脚数量最少;宽范围工作电压2.0 5.5V;工作电流2.0V 时,小于300nA;读/写时钟或RAM 数据时有两种传送方式单字节传送和多字节传送字符组方式;8 脚DIP 封装或可选的8 脚SOIC 封装根据表面装配;简单3 线接口;与TTL 兼容Vcc=5V;可选工业级温度范围-40 +85;与DS1202 兼容;在DS1202 基础上增加的特性;对Vcc1 有可选的涓流充电能力;双电源管用于主电源和备份电源供应;备份电源管脚可由电池或大容量电容输入;附加的7 字节暂存存储器;1 DS1302 的基本组成和工作原理DS1302 的引脚功能排列及描述如下图所示.ds1302引脚图管脚描述X1 X2 32.768KHz 晶振管脚GND 地RST 复位脚I/O 数据输入/输出引脚SCLK 串行时钟Vcc1,Vcc2 电源供电管脚DS1302 串行时钟芯片8 脚DIPDS1302S 串行时钟芯片8 脚SOIC 200milDS1302Z 串行时钟芯片8 脚SOIC 150mil2. DS1302 内部寄存器CH: 时钟停止位存器2 的第7 位12/24 小时标志CH=0 振荡器工作允许bit7=1,12 小时模式CH=1 振荡器停止bit7=0,24 小时模式WP: 写保护位寄存器2 的第5 位:AM/PM 定义WP=0 寄存器数据能够写入AP=1 下午模式WP=1 寄存器数据不能写入AP=0 上午模式TCS: 涓流充电选择DS: 二极管选择位TCS=1010 使能涓流充电DS=01 选择一个二极管TCS=其它禁止涓流充电DS=10 选择两个二极管DS=00 或11, 即使TCS=1010, 充电功能也被禁止RS位电阻典型位00没有没有01R12KΩ10R24KΩ11R38KΩ时钟:DS1302 与微控制器的接口软件及功能应用举例下面首先给出基本的接口软件然后举例说明各种功能的应用1 写保护寄存器操作当写保护寄存器的最高位为0 时允许数据写入寄存器写保护寄存器可以通过命令字节8E,8F 来规定禁止写入/读出写保护位不能在多字节传送模式下写入Write_Enable:MOV Command,#8Eh ;命令字节为8EMOV ByteCnt,#1 ;单字节传送模式MOV R0,#XmtDat 数据地址覆给R0MOV XmtDat,#00h 数据内容为0 写入允许ACALL Send_Byte 用写入数据子程序RET 返回调用本子程序处当写保护寄存器的最高位为1 时禁止数据写入寄存器Write_Disable:MOV Command,#8Eh ;命令字节为8EMOV ByteCnt,#1 ;单字节传送模式MOV R0,#XmtDat 数据地址覆给R0MOV XmtDat,#80h 数据内容为80h 禁止写入ACALL Send_Byte 调用写入数据子程序RET 返回调用本子程序处以上程序调用了基本数据发送(Send_Byte)模块及一些内存单元定义, 其源程序清单在附录中给出下面的程序亦使用了这个模块2 时钟停止位操作当把秒寄存器的第7 位时钟停止位设置为0 时起动时钟开始Osc_Enable:MOV Command,#80h ; 命令字节为80MOV ByteCnt,#1 ; 单字节传送模式MOV 0,#XmtDat 数据地址覆给R0MOV XmtDat,#00h 数据内容为0 振荡器工作允许ACALL Send_Byte 调用写入数据子程序RET 返回调用本子程序处当把秒寄存器的第7 位时钟停止位设置为1 时时钟振荡器停止HT1380 进入低功耗方式Osc_Disable:MOV Command,#80h ;命令字节为80MOV ByteCnt,#1 ;单字节传送模式MOV R0,#XmtDat 数据地址覆给R0MOV XmtDat,#80h 数据内容为80h 振荡器停止ACALL Send_Byte 调用写入数据子程序RET 返回调用本子程序处3. 多字节传送方式当命令字节为BE 或BF 时DS1302 工作在多字节传送模式8 个时钟/日历寄存器从寄存器0 地址开始连续读写从0 位开始的数据当命令字节为FE 或FF 时DS1302 工作在多字节RAM 传送模式31 个RAM 寄存器从0 地址开始连续读写从0 位开始的数据例如写入00 年6 月21 日星期三13 时59 分59 秒程序设置如下Write_Multiplebyte:MOV Command,#0BEh ;命令字节为BEhMOV ByteCnt,#8 ;多字节写入模式此模块为8 个MOV R0,#XmtDat 数据地址覆给R0MOV XmtDat,#59h 秒单元内容为59hMOV XmtDat+1,#59h 分单元内容为59hMOV XmtDat+2,#13h 时单元内容为13hMOV XmtDat+3,#21h 日期单元内容为21hMOV XmtDat+4,#06h 月单元内容为06hMOV XmtDat+5,#03h 星期单元内容为03hMOV XmtDat+6,#0 年单元内容为00hMOV XmtDat+7,#0 写保护单元内容为00hACALL Send_Byte 调用写入数据子程序RET 返回调用本子程序处读出寄存器0-7 的内容程序设置如下Read_Multiplebyte:MOV Command,#0BFh 命令字节为BFhMOV ByteCnt,#8 ; 多字节读出模式此模块为8 个MOV R1,#RcvDat 数据地址覆给R1ACALL Receive_Byte 调用读出数据子程序RET 返回调用本子程序处以上程序调用了基本数据接收(Receive_Byte)模块及一些内存单元定义, 其源程序清单在附录中给出下面的程序亦使用了这个模块4. 单字节传送方式例如写入8 时12 小时模式程序设置如下Write_Singlebyte:MOV Command,#84h ; 命令字节为84hMOV ByteCnt,#1 ; 单字节传送模式MOV R0,#XmtDat 数据地址覆给R0MOV XmtDat,#88h 数据内容为88hACALL Send_Byte 调用写入数据子程序RET 返回调用本子程序处上面所列出的程序模块Write_Enable Write_Disable Osc_Enable Osc_Disable 与单字节写入模块Write_Singlebyte 的程序架构完全相同仅只是几个入口参数不同本文是为了强调功能使用的不同才将其分为不同模块另外,与涓流充电相关的设定也是单字节操作方式,这里就不再单独列出,用户在使用中可灵活简略.下面模块举例说明如何单字节读出小时单元的内容.Read_Singlebyte:MOV Command,#85h ; 命令字节为85hMOV ByteCnt,#1 ; 单字节传送模式MOV R1,#RcvDat 数据地址覆给R1ACALL Receive_Byte 调用读出数据子程序RET 返回调用本子程序处DS1302 应用电路原理图P87LPC764 单片机选取内部振荡及内部复位电路附录数据发送与接收模块源程序清单; CPU 工作频率最大不超过20MHz;; P87LPC762/4 主控器发送接受数据程序; 说明本程序是利用Philips 公司的P87LPC764 单片机任何具有51 内核或其它合适的单片机都可在此作为主控器的普通I/O 口(如P1.2/P1.3/P1.4)实现总线的功能对总线上的器件本程序采用DS1302进行读写操作命令字节在Command 传送字节数在ByteCnt 中所发送的数据在XmtDat 中所接收的数据在RcvDat 中;;P87LPC762/4 主控器总线发送接受数据程序头文件;内存数据定义BitCnt data 30h ; 数据位计数器ByteCnt data 31h ; 数据字节计数器Command data 32h ; 命令字节地址RcvDat DA TA 40H ; 接收数据缓冲区XmtDat DATA 50H ; 发送数据缓冲区;端口位定义IO_DA TA bit P1.3 ; 数据传送总线SCLK bit P1.4 ; 时钟控制总线RST bit P1.2 ; 复位总线;;发送数据程序;名称:Send_Byte;描述:发送ByteCnt 个字节给被控器DS1302;命令字节地址在Command 中;所发送数据的字节数在ByteCnt 中发送的数据在XmtDat 缓冲区中;Send_Byte:CLR RST ;复位引脚为低电平所有数据传送终止NOPCLR SCLK 清时钟总线NOPSETB RST ;复位引脚为高电平逻辑控制有效NOPMOV A,Command 准备发送命令字节MOV BitCnt,#08h 传送位数为8S_Byte0:RRC A 将最低位传送给进位位CMOV IO_DA TA,C 位传送至数据总线NOPSETB SCLK 时钟上升沿发送数据有效NOPCLR SCLK 清时钟总线DJNZ BitCnt,S_Byte0 位传送未完毕则继续NOPS_Byte1: 准备发送数据MOV A,@R0 传送数据过程与传送命令相同MOV BitCnt,#08hS_Byte2:RRC AMOV IO_DATA,CNOPSETB SCLKNOPCLR SCLKDJNZ BitCnt,S_Byte2INC R0 发送数据的内存地址加1 DJNZ ByteCnt,S_Byte1 字节传送未完毕则继续NOPCLR RST 逻辑操作完毕清RSTRET;接收数据程序;;名称:Receive_Byte;描述:从被控器DS1302 接收ByteCnt 个字节数据;命令字节地址在Command 中;所接收数据的字节数在ByteCnt 中接收的数据在RcvDat 缓冲区中Receive_Byte:CLR RST ;复位引脚为低电平所有数据传送终止NOPCLR SCLK 清时钟总线NOPSETB RST ;复位引脚为高电平逻辑控制有效MOV A,Command 准备发送命令字节MOV BitCnt,#08h 传送位数为8R_Byte0:RRC A 将最低位传送给进位位CMOV IO_DA TA,C 位传送至数据总线NOPSETB SCLK 时钟上升沿发送数据有效NOPCLR SCLK 清时钟总线DJNZ BitCnt,R_Byte0 位传送未完毕则继续NOPR_Byte1: 准备接收数据CLR A 清类加器CLR C 清进位位CMOV BitCnt,#08h 接收位数为8R_Byte2:NOPMOV C,IO_DATA 数据总线上的数据传送给CRRC A 从最低位接收数据SETB SCLK 时钟总线置高NOPCLR SCLK 时钟下降沿接收数据有效DJNZ BitCnt,R_Byte2 位接收未完毕则继续MOV @R1,A 接收到的完整数据字节放入接收内存缓冲区INC R1 接收数据的内存地址加1DJNZ ByteCnt,R_Byte1 字节接收未完毕则继续NOPCLR RST 逻辑操作完毕清RSTRETEND直流参数表:主要电参数表:交流参数表:电容配置表:本文来自: 原文网址:/info/commonIC/0083003.html。
DS1302中文手册
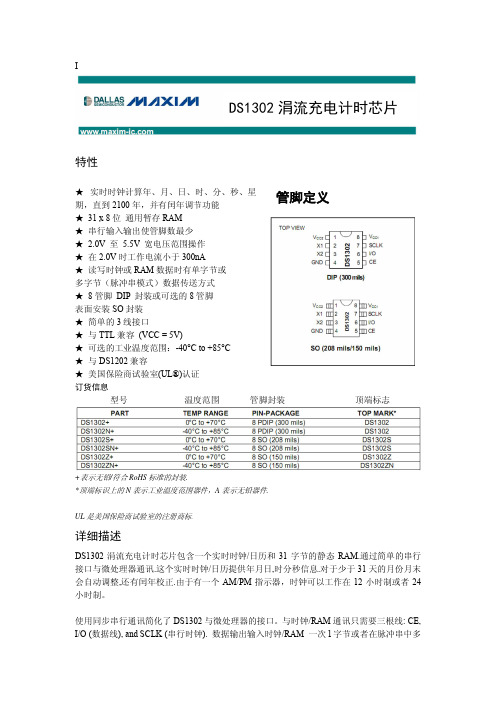
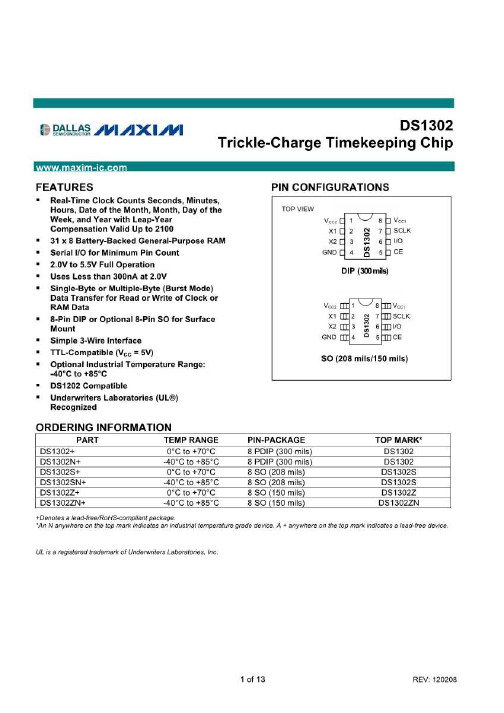
I特性★ 实时时钟计算年、月、日、时、分、秒、星期,直到2100年,并有闰年调节功能★ 31 x 8位 通用暂存RAM ★ 串行输入输出使管脚数最少 ★ 2.0V 至 5.5V 宽电压范围操作 ★ 在2.0V 时工作电流小于300nA★ 读写时钟或RAM 数据时有单字节或 多字节(脉冲串模式)数据传送方式 ★ 8管脚 DIP 封装或可选的8管脚 表面安装SO 封装 ★ 简单的3线接口★ 与TTL 兼容 (VCC = 5V)★ 可选的工业温度范围:-40°C to +85°C ★ 与DS1202兼容★ 美国保险商试验室(UL®)认证 订货信息型号 温度范围 管脚封装 顶端标志+表示无铅/符合RoHS 标准的封装.*顶端标识上的N 表示工业温度范围器件,A 表示无铅器件.UL 是美国保险商试验室的注册商标.详细描述DS1302涓流充电计时芯片包含一个实时时钟/日历和31字节的静态RAM.通过简单的串行接口与微处理器通讯.这个实时时钟/日历提供年月日,时分秒信息.对于少于31天的月份月末会自动调整,还有闰年校正.由于有一个AM/PM 指示器,时钟可以工作在12小时制或者24小时制。
使用同步串行通讯简化了DS1302与微处理器的接口。
与时钟/RAM 通讯只需要三根线: CE, I/O (数据线), and SCLK (串行时钟). 数据输出输入时钟/RAM 一次1字节或者在脉冲串中多管脚定义 D S 1302涓流充电计时芯片达31字节. DS1302被设计工作在非常低的电能下,在低于1μW 时还能保持数据和时钟信息. DS1302是DS1202的后继者. 除了DS1202的基本计时功能以外, DS1302有额外特点比如,双管脚主电源和备用电源,可编程涓流充电器V CC1,还附加7字节的暂存器.操作图1显示了串行计时器的主要元素:移位寄存器,控制逻辑,振荡器,实时时钟,还有RAM.典型工作电路图1 框图:典型工作性能(V C C = 3.3V , T A = +25°C ,除非另外声明.)电源控制输入 移位 寄存器命令控制逻辑实时时钟管脚描述管脚 名称 功能1V CC2双供电配置中的主电源供应管脚,V CC1连接到备用电源,在主电源失效时保持时间和日期数据.D S1302工作于V CC1和V CC2中较大者.当V CC2比V CC1高0.2V时,V CC2 给 D S1302供电.当V CC1比V CC2高时, V CC1给D S1302供电.2X1 3X2与标准的32.768k H z石英晶体相连.内部振荡器被设计与指定的6p F 装载电容的晶体一起工作.更多关于晶体选择和布局注意事项的信息请参考应用笔记58页:D a l l a s实时时钟晶振注意事项.D S1302也可以被外部的32.768k H z振荡器驱动.这种配置下,X1与外部震荡信号连接,X2悬浮.4G N D电源地5C E输入.C E信号在读写时必须保持高电平.此管脚内部有一个40kΩ(典型值)的下拉电阻连接到地.注意:先前的数据手册修正把C E当作R S T.管脚的功能没有改变.6I/O输入/推挽输出.I/O管脚是三线接口的双向数据管脚.此管脚内部有一个40kΩ(典型值)的下拉电阻连接到地.7S C L K输入.S C L K用来同步串行接口上的数据动作.此管脚内部有一个40kΩ(典型值)的下拉电阻连接到地.8V CC1低功率工作在单电源和电池工作系统和低功率备用电池.在使用涓流充电的系统中,这个管脚连接到可再充能量源.U L认证在使用锂电池时确保避免反向充电电流.详见w w w.m a x i m i c.c o m/T e c h S u p p o r t/Q A/n t r l.h t m.振荡电路D S1302使用一个外部32.768k H z晶体.振荡电路工作时不需要任何外接的电阻或者电容表1 详细指明了几个外部晶体的参数.图1 显示了震荡电路的功能简图.如果使用指定规格的晶体,启动时间通常少于1秒钟.时钟精确度时钟的精确度取决于晶振的精确度,以及振荡电路容性负载与晶振校正的容性负载之间匹配的精确度。
DS1302中文资料

VVcccc11:主电源;VVcccc22:备份电源。当VVcccc22>>VVcccc11++00..22VV时,由VVcccc22
DS1302 Vcc2<Vcc1 Vcc1 DS1302
能力。
----------------------- Page 9-----------------------
DS1302动程序分析
开 始
CCLLKK和和II//OO虽虽然然和和IIIICC总总线线接接在在一一条条引引脚脚上上,,但但DDSS11330022其其实实并并不不是是
使用IIC总线,而是一种三线式总线,
使用IIC总线,而是一种三线式总线,
使使用用IIIICC总总线线,,而而是是一一种种三三线线式式总总线线,,
Vcc2>Vcc1+0.2V 时,
Vcc2>Vcc1+0.2V 时,
VVcccc22>>VVcccc11++00..22VV时时,,
由 Vcc2向 DS1302供电,当 Vcc2<Vcc1时,由 Vcc1向
由 Vcc2向 DS1302供电,当 Vcc2<Vcc1时,由 Vcc1向
I/O 数据输入/输出引脚
SCLK 串行时钟
Vcc1,Vcc2电源供电管脚
各引脚的功能为
各引脚的功能为
各各引引脚脚的的功功能能为为:
Vcc1 Vcc2 Vcc2>Vcc1+0.2V Vcc2
----------------------- Page 3-----------------------
DS1302中文资料(加解释版)文档
DS1302涓流充电时钟保持芯片的原理与应用摘要:本文概括介绍了DS1302时钟芯片的特点和基本组成,通过实例详细说明了有关功能的应用软件。
关于DS1302各寄存器的详细位控功能请参考DALLAS达拉斯公司的相应产品资料。
概述:DS1302是DALLAS公司推出的涓流充电时钟芯片,内含有一个实时时钟/日历和31字节静态RAM,通过简单的串行接口与单片机进行通信。
实时时钟/日历电路提供秒、分、时、日、星期、月、年的信息,每月的天数和闰年的天数可自动调整,时钟操作可通过AM/PM 指示决定采用24或12小时格式。
DS1302与单片机之间能简单地采用同步串行的方式进行通信,仅需用到三个口线(1)RES复位、(2)I/O数据线、(3)SCLK串行时钟。
时钟/RAM的读/写数据以一个字节或多达31个字节的字符组方式通信。
DS1302工作时功耗很低,保持数据和时钟信息时功率小于1mW。
DS1302是由DS1202改进而来,增加了以下的特性:双电源管脚用于主电源和备份电源供应,Vcc1为可编程涓流充电电源,附加七个字节存储器。
它广泛应用于电话,传真,便携式仪器以及电池供电的仪器仪表等产品领域,下面将主要的性能指标作一综合:**实时时钟具有能计算2100年之前的秒、分、时、日、日期,星期,月,年的能力,还**有闰年调整的能力**318位暂存数据存储RAM**串行I/O口方式使得管脚数量最少**宽范围工作电压2.05.5V**工作电流2.0V时,小于300nA**读/写时钟或RAM数据时有两种传送方式单字节传送和多字节传送字符组方式**8脚DIP封装或可选的8脚SOIC封装根据表面装配**简单3线接口**与TTL兼容Vcc=5V**可选工业级温度范围-40+85**与DS1202兼容**在DS1202基础上增加的特性——对Vcc1有可选的涓流充电能力——双电源管用于主电源和备份电源供应——备份电源管脚可由电池或大容量电容输入——附加的7字节暂存存储器1DS1302的基本组成和工作原理DS1302的管脚排列及描述如下图及表所示管脚描述X1X232.768KHz晶振管脚GND地RST复位脚I/O数据输入/输出引脚SCLK串行时钟Vcc1,Vcc2电源供电管脚订单信息部分#描述DS1302串行时钟芯片8脚DIPDS1302S串行时钟芯片8脚SOIC(200mil)DS1302Z串行时钟芯片8脚SOIC(150mil)2.DS1302内部寄存器CH:时钟停止位:CH=0振荡器工作允许,CH=1振荡器停止;WP:写保护位:WP=0寄存器数据能够写入,WP=1寄存器数据不能写入;寄存器2的第7位,12/24小时标志:bit7=1,12小时模式,bit7=0,24小时模式;寄存器2的第5位:AM/PM定义:AP=0上午模式,AP=1下午模式;(**若为24小时模式,则此位为小时的10位**)TCS:涓流充电选择DS:二极管选择位TCS=1010使能涓流充电DS=01选择一个二极管TCS=其它禁止涓流充电DS=10选择两个二极管DS=00或11,即使TCS=1010,充电功能也被禁止以下为10个寄存器和31字节的SRAM内容,左边的为地址,右边的为每位对应的意思地址字节中的最低一位为读写控制位,0写,1读。
时钟芯片ds1302
时钟芯片ds1302
时钟芯片DS1302是一种具有实时时钟(RTC)功能的集成电路。
该芯片由Maxim Integrated公司生产,广泛用于各种电子
设备中,包括计算机、电视、仪表盘等。
DS1302的主要特性如下:
1. 时钟功能:DS1302可以提供准确的时间和日期信息,并能
够自动调整闰年。
2. 电源管理:芯片内部集成了电源管理电路,可以有效地管理电池的使用,以延长电池寿命。
3. 低功耗:DS1302在运行时非常省电,可通过外部电池供电,在断电时仍能维持时钟运行。
4. 串行接口:芯片通过串行接口与主控制器(如微处理器或单片机)进行通信,方便集成到各种系统中。
5. 多种时间格式:DS1302支持24小时制和12小时制的时间
显示,可以根据需要选择合适的格式。
6. 报警功能:芯片内置了报警功能,可在特定的时间点触发外部中断,用于提醒用户进行相关操作。
7. 温度补偿:DS1302能够通过内部温度传感器进行温度补偿,以提高时钟的准确性。
总的来说,DS1302是一款功能强大且易于使用的时钟芯片,
可以在各种电子设备中提供准确的时间和日期信息。
它的特点包括低功耗、实时时钟功能、串行接口以及报警功能等,非常适合用于需要精准时间计算和管理的应用。
ds1302中文资料
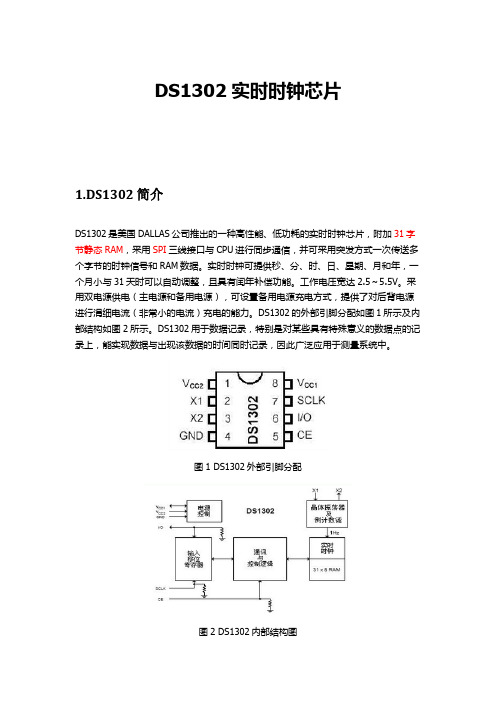
1 DS1302 简介:DS1302是美国DALLAS公司推出的一种高性能、低功耗的实时时钟芯片,附加31字节静态RAM,采用SPI三线接口与CPU进行同步通信,并可采用突发方式一次传送多个字节的时钟信号和RAM 数据。
实时时钟可提供秒、分、时、日、星期、月和年,一个月小与31天时可以自动调整,且具有闰年补偿功能。
工作电压宽达2.5~5.5V。
采用双电源供电(主电源和备用电源),可设置备用电源充电方式,提供了对后背电源进行涓细电流充电的能力。
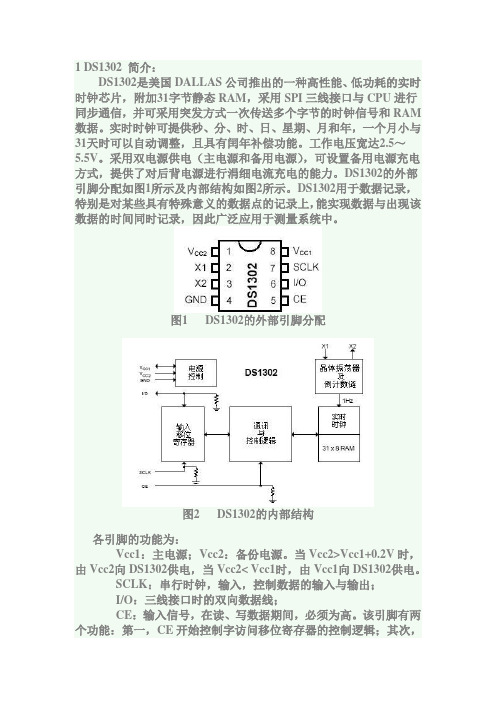
DS1302的外部引脚分配如图1所示及内部结构如图2所示。
DS1302用于数据记录,特别是对某些具有特殊意义的数据点的记录上,能实现数据与出现该数据的时间同时记录,因此广泛应用于测量系统中。
图1 DS1302的外部引脚分配图2 DS1302的内部结构各引脚的功能为:Vcc1:主电源;Vcc2:备份电源。
当Vcc2>Vcc1+0.2V时,由Vcc2向DS1302供电,当Vcc2< Vcc1时,由Vcc1向DS1302供电。
SCLK:串行时钟,输入,控制数据的输入与输出;I/O:三线接口时的双向数据线;CE:输入信号,在读、写数据期间,必须为高。
该引脚有两个功能:第一,CE开始控制字访问移位寄存器的控制逻辑;其次,CE提供结束单字节或多字节数据传输的方法。
DS1302有下列几组寄存器:① DS1302有关日历、时间的寄存器共有12个,其中有7个寄存器(读时81h~8Dh,写时80h~8Ch),存放的数据格式为BCD码形式,如图3所示。
图 3 DS1302有关日历、时间的寄存器小时寄存器(85h、84h)的位7用于定义DS1302是运行于12小时模式还是24小时模式。
当为高时,选择12小时模式。
在12小时模式时,位5是,当为1时,表示PM。
在24小时模式时,位5是第二个10小时位。
秒寄存器(81h、80h)的位7定义为时钟暂停标志(CH)。
当该位置为1时,时钟振荡器停止,DS1302处于低功耗状态;当该位置为0时,时钟开始运行。
ds1302中文资料
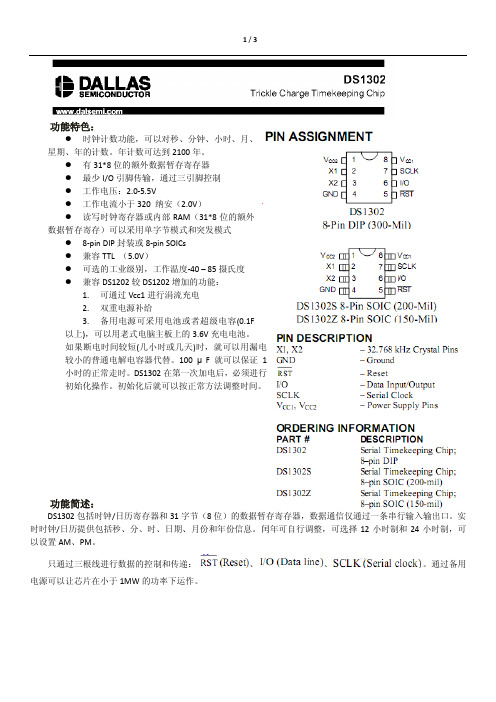
功能特色:●时钟计数功能,可以对秒、分钟、小时、月、星期、年的计数。
年计数可达到2100年。
●有31*8位的额外数据暂存寄存器●最少I/O引脚传输,通过三引脚控制●工作电压:2.0-5.5V●工作电流小于320 纳安(2.0V)●读写时钟寄存器或内部RAM(31*8位的额外数据暂存寄存)可以采用单字节模式和突发模式●8-pin DIP封装或8-pin SOICs●兼容TTL (5.0V)●可选的工业级别,工作温度-40 – 85摄氏度●兼容DS1202较DS1202增加的功能:1.可通过Vcc1进行涓流充电2.双重电源补给3.备用电源可采用电池或者超级电容(0.1F以上),可以用老式电脑主板上的3.6V充电电池。
如果断电时间较短(几小时或几天)时,就可以用漏电较小的普通电解电容器代替。
100 μF就可以保证1小时的正常走时。
DS1302在第一次加电后,必须进行初始化操作。
初始化后就可以按正常方法调整时间。
功能简述:DS1302包括时钟/日历寄存器和31字节(8位)的数据暂存寄存器,数据通信仅通过一条串行输入输出口。
实时时钟/日历提供包括秒、分、时、日期、月份和年份信息。
闰年可自行调整,可选择12小时制和24小时制,可以设置AM、PM。
只通过三根线进行数据的控制和传递:、、。
通过备用电源可以让芯片在小于1MW的功率下运作。
工作过程:主要工作原理图如Figure 1 所示:移位寄存器,控制逻辑,晶振,时钟和RAM。
在进行任何数据传输时,必须被制高电平(注意虽然将它置为高电平,内部时钟还是在晶振作用下走时的,此时,允许外部读写数据),在每个SCLK上升沿时数据被输入,下降沿时数据被输出,一次只能读写一位,适度还是写需要通过串行输入控制指令来实现(也是一个字节),通过8个脉冲便可读取一个字节从而实现串行输入与输出。
最初通过8个时钟周期载入控制字节到移位寄存器。
如果控制指令选择的是单字节模式,连续的8个时钟脉冲可以进行8位数据的写和8位数据的读操作,SCLK时钟的上升沿时,数据被写入DS1302,SCLK脉冲的下降沿读出DS1302的数据。
DS1302中文资料
DS1302中文资料DS1302是一款低功耗的串行实时时钟芯片,广泛用于各种电子设备中,例如电子表、温度计、计时器等。
该芯片具有高准确度、稳定性和低功耗的特点,功能强大,使用简便。
以下是DS1302芯片的详细中文资料及使用说明。
1.特性:-时钟/日历功能:提供秒、分、时、日期、月份和年份的精确计时和日期记录功能。
-31个可编程的时间/日期寄存器:用于存储时钟和日期信息。
-控制根据电源情况自动选择电池或外部电源。
-8字节RAM用于存储额外的用户信息。
-提供电池低电压检测功能。
-通过3线串行接口与微控制器通讯。
-工作电流小于1.5μA。
2.引脚功能:-VCC:电源正极,3.3V至5V的电源供应。
-GND:地。
-RST:复位引脚,用于启动或复位芯片。
-CLK:时钟引脚,与外部晶振连接。
-DAT:数据引脚,与外部时钟连接。
-VBAT:备用电池引脚,用于提供备用电源。
3.时钟和日历操作:-初始化时钟芯片:首先将RST引脚置为高电平,然后将时钟和日期信息写入相应寄存器。
-读取时钟和日期信息:向相应寄存器发送读取指令,然后从DAT引脚读取数据。
-设置闹钟:将闹钟时间和日期写入相应寄存器,设置闹钟标志位。
-清除闹钟标志位:将闹钟标志位清零,重置闹钟状态。
-自动切换电源:设置使能位,将芯片自动切换为外部电源或电池供电。
4.通信协议:-DS1302使用3线串行接口与微控制器通讯,包括时钟(CLK)、数据(DAT)和复位(RST)引脚。
-通信数据以字节为单位,高位在前,低位在后。
-时钟和数据引脚都是双向引脚,需要使用上拉电阻来保证电平的稳定。
-通信基于时钟的脉冲信号,每个时钟周期有四个时钟脉冲。
5.典型应用:-电子表:DS1302提供精确的时钟和日期计时功能,可用于制作各种类型的电子表。
-温度计:结合温度传感器,可以通过DS1302记录和显示温度信息。
-计时器:通过设置定时器和闹钟功能,可以实现计时和提醒功能。
6.注意事项:-正确连接电源和地引脚,确保电源电压在允许范围内。
DS1302中文手册
DS1302中文手册一、简介DS1302是一种实时时钟芯片,主要用于计算机系统、通信设备、智能家居等领域。
本手册旨在提供DS1302的详细说明和操作方法,帮助用户正确使用该芯片。
二、芯片特性1. 基本特性:- 日期格式:年-月-日- 时间格式:时:分:秒- 温度测量范围:-55℃至+125℃- 时钟频率:32768Hz2. 时钟控制:- 时钟源选择:外部或内部- 时钟暂停功能- 时钟调制功能三、引脚定义DS1302具有8个引脚,分别为:1. X1:外部时钟输入端2. X2:外部时钟输出端3. Vcc:供电正极4. GND:地5. SDA:串行数据输入/输出端6. SCLK:串行数据时钟输入端7. RST:复位控制端8. BAT:电池输入端四、工作原理DS1302基于Bipolar CMOS技术,通过外部提供的时钟信号进行时间计数和存储。
芯片内部包含时钟控制电路、RAM存储器、温度计和时钟计数器等功能模块,通过串行通信协议与外部设备进行数据传输。
五、使用方法1. 芯片初始化:- 将X1和X2连接外部时钟源- Vcc与电源正极相连- GND与地相连2. 设定时间:- 通过串行数据输入将年、月、日、时、分、秒信息写入相应寄存器- 通过串行数据输入将温度信息写入相应寄存器(可选)3. 读取时间:- 通过串行数据输出获取年、月、日、时、分、秒信息- 通过串行数据输出获取温度信息(可选)4. 设置时钟暂停:- 通过串行数据输入将时钟控制字节写入相应寄存器控制位,实现时钟暂停功能5. 时钟调制:- 通过串行数据输入将时钟调制字节写入相应寄存器控制位,实现时钟调制功能六、注意事项1. 确保正确接线,避免短路或浮空引脚2. 使用合适的外部时钟源,确保时钟的准确性3. 避免频繁的读写操作,以延长芯片的使用寿命4. 根据实际需求进行合理设置,避免不必要的功能开启5. 定期校准芯片时间,确保准确性七、总结本手册介绍了DS1302的特性、引脚定义、工作原理以及使用方法,并提供了一些注意事项供用户参考。
ds1302资料
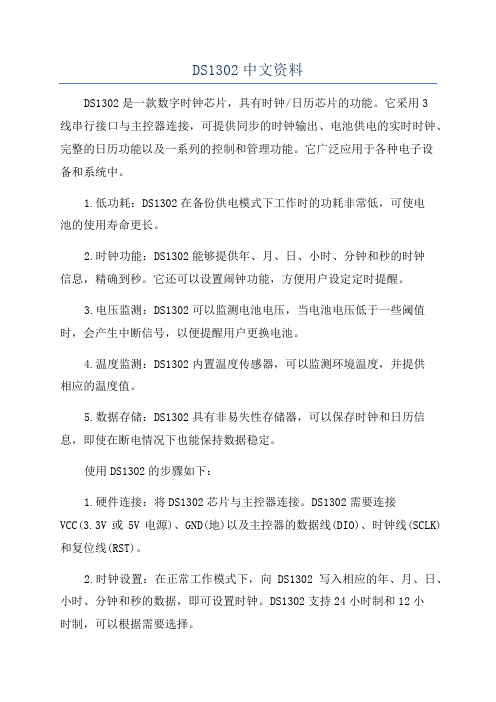
DS1302实时时钟芯片1.DS1302 简介DS1302是美国DALLAS公司推出的一种高性能、低功耗的实时时钟芯片,附加31字节静态RAM,采用SPI三线接口与CPU进行同步通信,并可采用突发方式一次传送多个字节的时钟信号和RAM数据。
实时时钟可提供秒、分、时、日、星期、月和年,一个月小与31天时可以自动调整,且具有闰年补偿功能。
工作电压宽达2.5~5.5V。
采用双电源供电(主电源和备用电源),可设置备用电源充电方式,提供了对后背电源进行涓细电流(非常小的电流)充电的能力。
DS1302的外部引脚分配如图1所示及内部结构如图2所示。
DS1302用于数据记录,特别是对某些具有特殊意义的数据点的记录上,能实现数据与出现该数据的时间同时记录,因此广泛应用于测量系统中。
图1 DS1302外部引脚分配图2 DS1302内部结构图2.各引脚的功能为:Vcc1:主电源;Vcc2:备用电源。
当Vcc2>Vcc1+0.2V时,由Vcc2向DS1302供电,当Vcc2< Vcc1时,由Vcc1向DS1302供电。
SCLK:串行时钟,输入,控制数据的输入与输出;I/O:三线接口时的双向数据线;CE:输入信号,在读、写数据期间,必须为高。
该引脚有两个功能:一、CE开始控制字访问移位寄存器的控制逻辑;二、CE提供结束单字节或多字节数据传输的方法。
3.DS1302有下列几组寄存器有关日历、时间的寄存器,存放的数据格式为BCD码形式如果我们送字节到DS1302中,DS1302就会把他储存为BCD码格式,那么我们对DS1302进行读取的时候,我们就需要把BCD码转换回来;BCD码介绍:用4位二进制数表示一位10进制数的0-9,这10个数字简称BCD码;最小值为0000,最大表示值为1001;一个字节中低4位表示个位,高4为表示10位,比如10的BCD码=0001 0000;4.BCD码的转换:例55转BCD unsigned char data1,data2=45;data1=data2/10; data2=data2%10; data2=data2+data1*16;data2最终等于69;换算回10进制 data1=data2/16;data2=data2%16;data1=data1*10+data2;=455.操作方式小时寄存器(85h、84h)的位7用于定义DS1302是运行于12小时模式还是24小时模式。
DS1302时钟芯片资料
我们继续向CEPARK AVR的第一个终点跨进,今天是倒数第二个内容,时钟芯片DS1302。
以下是DS1302的一些概述(来自ZLG文档):DS1302是DALLAS公司推出的涓流充电时钟芯片,内含有一个实时时钟/日历和31字节静态RAM,通过简单的串行接口与单片机进行通信。
实时时钟/日历电路提供秒、分、时、日、周、月、年的信息,每月的天数和闰年的天数可自动调整。
时钟操作可通过AM/PM指示决定采用24或12小时格式。
DS1302与单片机之间能简单地采用同步串行的方式进行通信,仅需用到三个口线:(1)RES复位(2)I/O数据线(3)SCLK串行时钟。
时钟/RAM的读/写数据以一个字节或多达31个字节的字符组方式通信。
DS1302工作时功耗很低保持数据和时钟信息时功率小于1mWDS1302是由DS1202改进而来增加了以下的特性:双电源管脚用于主电源和备份电源供应,Vcc1为可编程涓流充电电源,附加七个字节存储器。
它广泛应用于电话、传真、便携式仪器以及电池供电的仪器仪表等产品领域下面。
将主要的性能指标作一综合:★实时时钟具有能计算2100年之前的秒、分、时、日、星期、月、年的能力,还有闰年调整的能力★318位暂存数据存储RAM★串行I/O口方式使得管脚数量最少★宽范围工作电压2.05.5V★工作电流 2.0V时,小于300nA★读/写时钟或RAM数据时有两种传送方式单字节传送和多字节传送字符组方式★8脚DIP封装或可选的8脚SOIC封装根据表面装配★简单3线接口★与TTL兼容Vcc=5V★可选工业级温度范围-40+85★双电源管用于主电源和备份电源供应以上是DS1302的一些全面的预览,以下为DS1302管脚图:DS1302管脚.jpgVCC2:主用电源引脚X1、X2:DS1302外部晶振引脚GND:地RST:复位引脚I/O:串行数据引脚,数据输出或者输入都从这个引脚SCLK:串行时钟引脚VCC1:备用电源我们来看看DS1302的典型外围电路,下面是CEPARK AVR的DS1302模块原理图:原理图.jpg我们看到:1、VCC为主电源接5V,C1为滤波电容2、X1、X2外接32.768K的晶振3、5、6、7脚分别与控制器相联,注意外部4.7K上拉电阻4、备用电源脚,注意是3.3V,DS1302要求备用电源电压稍微低于主用电源下面讲讲DS1302的具体操作。
DS1302中文资料
DS1302中文资料DS1302是一款数字时钟芯片,具有时钟/日历芯片的功能。
它采用3线串行接口与主控器连接,可提供同步的时钟输出、电池供电的实时时钟、完整的日历功能以及一系列的控制和管理功能。
它广泛应用于各种电子设备和系统中。
1.低功耗:DS1302在备份供电模式下工作时的功耗非常低,可使电池的使用寿命更长。
2.时钟功能:DS1302能够提供年、月、日、小时、分钟和秒的时钟信息,精确到秒。
它还可以设置闹钟功能,方便用户设定定时提醒。
3.电压监测:DS1302可以监测电池电压,当电池电压低于一些阈值时,会产生中断信号,以便提醒用户更换电池。
4.温度监测:DS1302内置温度传感器,可以监测环境温度,并提供相应的温度值。
5.数据存储:DS1302具有非易失性存储器,可以保存时钟和日历信息,即使在断电情况下也能保持数据稳定。
使用DS1302的步骤如下:1.硬件连接:将DS1302芯片与主控器连接。
DS1302需要连接VCC(3.3V或5V电源)、GND(地)以及主控器的数据线(DIO)、时钟线(SCLK)和复位线(RST)。
2.时钟设置:在正常工作模式下,向DS1302写入相应的年、月、日、小时、分钟和秒的数据,即可设置时钟。
DS1302支持24小时制和12小时制,可以根据需要选择。
3.读取时钟:通过读取DS1302的相应寄存器,可以获取当前的时钟信息。
可以先读取秒寄存器,再读取分、时、日、月和年的寄存器,以获得完整的时钟信息。
5.闹钟设置:DS1302支持设置闹钟功能。
通过读取和写入相应的寄存器,可以设置闹钟的小时和分钟,并可以选择是否启用闹钟功能。
6.温度监测:DS1302可以读取内置温度传感器的数值,并将其转换为摄氏温度。
通过读取相应的寄存器,可以获取当前的温度值。
7.电压监测:DS1302可以监测电池电压,并在电池电压低于设定阈值时产生中断信号。
通过读取相应的寄存器,可以获取当前的电池电压值。
ds1302时钟芯片介绍
寄存器名称 取值范围 D7 D6 D5 D4 D3 D2 D1 D0
秒寄存器 00~59 CH 秒的十位
秒的个位
分寄存器 00~59 0
分的十位
分的个位
小时寄存器
01~12或 00~23
12/24
0
A/P
HR
小时的个位
日寄存器 01~31 0 0 日的十位 日的个位
寄存器名称
取值 D7 D6 D5 D4 D3 D2 D1 D0 范围
月寄存器 01~12 0 0 0 1或0 月的个位
星期寄存器 01~07 0 0 0 0
星期几
年寄存器 01~99
年的十位
年的个位
写保护寄存器
WP 0 0 0 0 0 0 0
慢充电寄存器
TCS TCS TCS TCS DS DS RS RS
时钟突发寄存器
说明: (1)数据都以BCD码形式。 (2)小时寄存器的D7位为12小时制/24小时制 的选择位,当为1时选12小时制,当为0时选24小 时制。当12小时制时,D5位为1是上午,D5位为0 是下午,D4为小时的十位。当24小时制时,D5、 D4位为小时的十位。 (3)秒寄存器中的CH位为时钟暂停位,当为1 时钟暂停,为0时钟开始启动。
4)写保护寄存器中的WP为写保护位,当WP=1,写保 护,当WP=0未写保护,当对日历、时钟寄存器或片 内RAM进行写时WP应清零,当对日历、时钟寄存器 或片内RAM进行读时WP一般置1。
(5)慢充电寄存器的TCS位为控制慢充电的选择,当 它为1010才能使慢充电工作。DS为二极管选择位。 DS为01选择一个二极管,DS为10选择二个二极管, DS为11或00充电器被禁止,与TCS无关。RS用于选 择连接在VCC2与VCC1之间的电阻,RS为00,充电器 被禁止,与TCS无关,电阻选择情况见表.
DS1302中文资料,带源代码
DS1302 引脚
X1 X2 32.768KHz 晶振管脚 GND 地 CE 复位脚 I/O 数据输入/输出引脚 SCLK 串行时钟 Vcc1,Vcc2 电源供电管脚
各引脚的功能为:
Vcc1:主电源;Vcc2:备份电源。当Vcc2>Vcc1+0.2V时,由Vcc2 向DS1302供电,当Vcc2< Vcc1时,由Vcc1向DS1302供电。 SCLK:串行时钟,输入,控制数据的输入与输出; I/O:三线接口时的双向数据线; CE:输入信号,在读、写数据期间,必须为高。该引脚有两个功能: 第一,CE开始控制字访问移位寄存器的控制逻辑;其次, CE 提供结束单字节或多字节数据传输的方法。
参考电路:
如上图所示: DS1302 与单片机的连接也仅需要 3 条线:CE 引脚、SCLK 串行时钟 引脚、I/O 串行数据引脚,Vcc2 为备用电源,外接 32.768kHz 晶振, 为芯片提供计时脉冲。
实际电路:
Vcc_5V:为电路中的主电源;Vcc2,也就是 BT1 为备份电源。当 Vcc2>Vcc1+0.2V 时, 由 Vcc2 向 DS1302 供 电 , 当 Vcc2< Vcc1 时 , 由 Vcc1 向 DS1302 供电 CLK 和 I/O 虽然和 IIC 总线接在一条引脚上,但 DS1302 其实并不是 使用 IIC 总线,而是一种三线式总线,
delayus(2); } return dat;//返回读取出的数据 }
寄存器和 RAM
对 DS1302 的操作就是对其内部寄存器的操作,DS1302 内部共有 12 个寄存器, 其中有: 7 个寄存器与日历、时钟相关,存放的数据位为 BCD 码形式。 此外,DS1302 还有年份寄存器、控制寄存器、充电寄存器、时钟突发寄存器 及与 RAM 相关的寄存器等。 时钟突发寄存器可一次性顺序读写除充电寄存器以外的寄存器。 如下所示:
慢速充电时钟芯片DS1302中英文资料

DS1302 Trickle Charge Timekeeping Chip一、FEATURES1、Real time clock counts seconds, minutes hours, date of the month, month, day of the week, and year with leap year compensation valid up to 2100.2、31 x 8 RAM for scratchpad data storage.3、Serial I/O for minimum pin count.4、2.0–5.5V full operation.5、Uses less than 300 nA at 2.0V.6、Single–byte or multiple–byte (burst mode) data transfer for read or write of clock or RAM data.7、8–pin DIP or optional 8–pin SOICs for surface mount.8、Simple 3–wire interface.9、TTL–compatible (VCC = 5V).10、Optional industrial temperature range –40°C to +85°C.11、DS1202 compatible.二、PIN ASSIGNMENT三、PIN DESCRIPTION①X1, X2:32.768 kHz Crystal Pins;②GND:Ground;③RST:Reset;④I/O:Data Input/Output;⑤SCLK:Serial Clock;⑥VCC1, VCC2:Power Supply Pins四、DESCRIPTIONThe DS1302 Trickle Charge Timekeeping Chip contains a real time clock/calendar and 31 bytes of static RAM. It communicates with a microprocessor via a simple serial interface. The real time clock/calendar provides seconds, minutes, hours, day, date, month, and year information. The end of the month date is automatically adjusted for months with less than 31 days, including corrections for leap year. The clock operates in either the 24–hour or 12–hour format with an AM/PM indicator. Interfacing the DS1302 with a microprocessor is simplified by using synchronous serial communication. Only three wires are required to communicate with the clock/RAM: (1) RST(Reset), (2) I/O (Data line), and (3) SCLK (Serial clock). Data can be transferred to and from the clock/RAM 1 byte at a time or in a burst of up to 31 bytes. The DS1302 is designed to operate on very low power and retain data and clock information on less than 1 microwatt.The DS1302 is the successor to the DS1202. In addition to the basic timekeeping functions of the DS1202, the DS1302 has the additional features of dual power pins for primary and back–up power supplies, programmable trickle charger for VCC1, and seven additional bytes of scratchpad memory.(1)、OPERATIONThe main elements of the Serial Timekeeper are shown in Figure 1: shift register, control logic, oscillator,real time clock, and RAM.DS1302 BLOCK DIAGRAM Figure 1(2)、SIGNAL DESCRIPTIONS①VCC1:VCC1 provides low power operation in single supply and battery operated systems as well as low power battery backup. In systems using the trickle charger, the rechargeable energy source is connected to this pin.②VCC2 :Vcc2 is the primary power supply pin in a dual supply configuration. VCC1 is connected to a backup source to maintain the time and date in the absence of primary power.③The DS1302 will operate from the larger of VCC1 or VCC2. When VCC2 is greater than VCC1 + 0.2V, VCC2 will power the DS1302. When VCC2 is less than VCC1, VCC1 will power the DS1302.④SCLK (Serial Clock Input) – SCLK is used to synchronize data movement on the serial interface.⑤I/O (Data Input/Output) – The I/O pin is the bi-directional data pin for the 3-wire interface.⑥RST (Reset) – The reset signal must be asserted high during a read or a write.⑦X1, X2 :Connections for a standard 32.768 kHz quartz crystal. The internal oscillator is designed for operation with a crystal having a specified load capacitance of 6 pF.(3)、COMMAND BYTEThe command byte is shown in Figure 2. Each data transfer is initiated by a command byte. The MSB (Bit 7) must be a logic 1. If it is 0, writes to the DS1302 will be disabled. Bit 6specifies clock/calendar data if logic 0 or RAM data if logic 1. Bits 1 through 5 specify the designated registers to be input or output, and the LSB (bit 0) specifies a write operation (input) if logic 0 or read operation (output) if logic 1. The command byte is always input starting with the LSB (bit 0).ADDRESS/COMMAND BYTE Figure 2(4)、RESET AND CLOCK CONTROLAll data transfers are initiated by driving the RST input high. The RST input serves two functions. First, RST turns on the control logic which allows access to the shift register for the address/command sequence. Second, the RST signal provides a method of terminating either single byte or multiple byte data transfer. A clock cycle is a sequence of a falling edge followed by a rising edge. For data inputs, data must be valid during the rising edge of the clock and data bits are output on the falling edge of clock. If the RST input is low all data transfer terminates and the I/O pin goes to a high impedance state. Data transfer is illustrated in Figure 3. At power–up, RST must be a logic 0 until V CC> 2.0 volts. Also SCLK must be at a logic 0 when RST is driven to a logic 1 state.DATA TRANSFER SUMMARY Figure 3(5)、DATA INPUTFollowing the eight SCLK cycles that input a write command byte, a data byte is input on the rising edge of the next eight SCLK cycles. Additional SCLK cycles are ignored should they inadvertently occur. Data is input starting with bit 0.(6)、DATA OUTPUTFollowing the eight SCLK cycles that input a read command byte, a data byte is output on the falling edge of the next eight SCLK cycles. Note that the first data bit to be transmitted occurs on the first falling edge after the last bit of the command byte is written. AdditionalSCLK cycles retransmit the data bytes should they inadvertently occur so long as RST remains high. This operation permits continuous burst mode read capability. Also, the I/O pin is tri–stated upon each rising edge of SCLK. Data is output starting with bit 0.(7)、BURST MODEBurst mode may be specified for either the clock/calendar or the RAM registers by addressing location 31 decimal (address/command bits 1 through 5 = logic 1). As before, bit 6 specifies clock or RAM and bit 0 specifies read or write. There is no data storage capacity at locations 9 through 31 in the Clock/Calendar Registers or location 31 in the RAM registers. Reads or writes in burst mode start with bit 0 of address 0.When writing to the clock registers in the burst mode, the first eight registers must be written in order for the data to be transferred. However, when writing to RAM in burst mode it is not necessary to write all 31 bytes for the data to transfer. Each byte that is written to will be transferred to RAM regardless of whether all 31 bytes are written or not.(8)、CLOCK/CALENDARThe clock/calendar is contained in seven write/read registers as shown in Figure 4. Data contained in the clock/ calendar registers is in binary coded decimal format (BCD). REGISTER ADDRESS/DEFINITION Figure 4:(9)、CLOCK HALT FLAGBit 7 of the seconds register is defined as the clock halt flag. When this bit is set to logic 1, the clock oscillator is stopped and the DS1302 is placed into a low–power standby mode with a current drain of less than 100 nanoamps. When this bit is written to logic 0, the clock will start. The initial power on state is not defined.(10)、AM-PM/12-24 MODEBit 7 of the hours register is defined as the 12– or 24–hour mode select bit. When high, the 12–hour mode is selected. In the 12–hour mode, bit 5 is the AM/PM bit with logic high being PM. In the 24–hour mode, bit 5 is the second 10-hour bit (20 – 23 hours).(11)、WRITE PROTECT BITBit 7 of the control register is the write-protect bit. The first seven bits (bits 0 –6) are forced to 0 and will always read a 0 when read. Before any write operation to the clock or RAM, bit 7 must be 0. When high, the write protect bit prevents a write operation to any other register. The initial power on state is not defined. Therefore the WP bit should be cleared before attempting to write to the device.(12)、TRICKLE CHARGE REGISTERThis register controls the trickle charge characteristics of the DS1302. The simplified schematic of Figure 5 shows the basic components of the trickle charger. The trickle charge select (TCS) bits (bits 4 -7) control the selection of the trickle charger. In order to prevent accidental enabling, only a pattern of 1010 will enable the trickle charger. All other patterns will disable the trickle charger. The DS1302 powers up with the trickle charger disabled. The diode select (DS) bits (bits 2 – 3) select whether one diode or two diodes are connected between V CC2 and V CC1. If DS is 01, one diode is selected or if DS is 10, two diodes are selected. If DS is 00 or 11, the trickle charger is disabled independently of TCS. The RS bits (bits 0 -1) select the resistor that is connected between V CC2 and V CC1. The resistor selected by the resistor select (RS) bits is as follows.If RS is 00, the trickle charger is disabled independently of TCS.Diode and resistor selection is determined by the user according to the maximum current desired for battery or super cap charging. The maximum charging current can be calculated as illustrated in the following example. Assume that a system power supply of 5 volt is applied to V CC2 and a super cap is connected to V CC1. Also assume that the trickle charger has been enabled with one diode and resistor R1 between V CC2 and V CC1. The maximum current I max would therefore be calculated as follows:I max = (5.0V – diode drop) / R1~ (5.0V – 0.7V) / 2 kΩ~ 2.2 MaObviously, as the super cap charges, the voltage drop between V CC2 and V CC1 will decrease and thereforethe charge current will decrease.(13)、CLOCK/CALENDAR BURST MODEThe clock/calendar command byte specifies burst mode operation. In this mode the first eight clock/calendar registers can be consecutively read or written (see Figure 4) starting with bit 0 of address 0. If the write protect bit is set high when a write clock/calendar burst mode is specified, no data transfer will occur to any of the eight clock/calendar registers (this includes the control register). The trickle charger is not accessible in burst mode. At the beginning of a clock burst read, the current time is transferred to a second set of registers. The time information is read from these secondary registers, while the clock may continue to run. This eliminates the need to re-read the registers in case of an update of the main registers during a read.(14)、RAMThe static RAM is 31 x 8 bytes addressed consecutively in the RAM address space. (15)、RAM BURST MODEThe RAM command byte specifies burst mode operation. In this mode, the 31 RAM registers can be consecutively read or written (see Figure 4) starting with bit 0 of address 0.(16)、REGISTER SUMMARYA register data format summary is shown in Figure 4.(17)、CRYSTAL SELECTIONA 32.768 kHz crystal can be directly connected to the DS1302 via X1 and X2. The crystal selected for use should have a specified load capacitance (CL) of 6 pF. For more information on crystal selection and crystal lay out consideration, please consult Application Note 58, “Crystal Considerations with Dallas Real Time Clocks."五、ABSOLUTE MAXIMUM RATINGS*Voltage on Any Pin Relative to Ground –0.5V to +7.0VOperating Temperature 0°C to 70°C or - 40︒C to +85︒C for industrial Storage Temperature –55°C to +125°CSoldering Temperature 260°C for 10 seconds (DIP)*This is a stress rating only and functional operation of the device at these or any other conditions above those indicated in the operation sections of this specification is not implied. Exposure to absolute maximum rating conditions for extended periods of time may affect reliability.六、RECOMMENDED DC OPERATING CONDITIONS七、DC ELECTRICAL CHARACTERISTICS八、CAPACITANCE(t A= 25ºC)九、AC ELECTRICAL CHARACTERISTICS十、TIMING DIAGRAM: READ DATA TRANSFER Figure 5TIMING DIAGRAM: WRITE DATA TRANSFER Figure 6十一、NOTES:1.All voltages are referenced to ground.2.Logic one voltages are specified at a source current of 1 mA at V CC=5V and 0.4 mA atV CC=2.0V,V OH=V CC for capacitive loads.3.Logic zero voltages are specified at a sink current of 4 mA at V CC=5V and 1.5 mA atV CC=2.0V,V OL=GND for capacitive loads.4.I CC1T and I CC2T are specified with I/O open, RST set to a logic “0”, and clock halt flag=0 (oscillator enabled).5.I CC1A and I CC2A are specified with the I/O pin open, RST high, SCLK=2 MHz atV CC=5V;SCLK=500 kHz, V CC=2.0V and clock halt flag=0 (oscillator enabled).6.RST, SCLK, and I/O all have 40 kΩ pull–down resistors to ground.7.Measured at V IH=2.0V or V IL=0.8V and 10 ns maximum rise and fall time.8.Measured at V OH=2.4V or V OL=0.4V.9.Load capacitance = 50 pF.10.I CC1S and I CC2S are specified with RST, I/O, and SCLK open. The clock halt flag must be set to logic one (oscillator disabled).11.V CC=V CC2, when V CC2>V CC1 +0.2V; V CC=V CC1, when V CC1>V CC2.12.V CC2=0V.13.V CC1=0V.14. Typical values are at 25°C.慢速充电时钟芯片DS1302一、特性1、实时时钟,可对秒、分、时、日、周、月以及带闰年补偿的年进行计数,有效期2100年。
DS1302中文资料_数据手册_参数
DS1302涓流充电计时芯片 6 13 CE和时钟控制驱动CE输入高电平会启动所有数据传输. CE输入有两个功能.首先,CE打开控制逻辑允 许访问地址/命令序列的移位寄存器.其次,CE信号提供了一种终止单字节或多字节CE数据传输的方法.时钟周期是一系列的上升沿, 然后是下降沿. DS1302对于数据输入,数据在过程中必须有效时钟的上升沿和数据位在时钟的下降沿输出.如果CE输入低,所有数据 传输终止,I / O引脚进入高阻状态.图4显示了数据传输.在通电时,CE 在V CC > 2.0V 之前必须为逻辑0 . 而且,当CE被驱动到逻 辑1状态时,SCLK必须处于逻辑0.数据输入在输入写命令字节的8个SCLK周期之后,数据字节在下一个的上升沿输入八个SCLK周期. 如果DS1302无意中出现其他SCLK周期,则会被忽略.数据以输入开始位0.数据输出在输入一个读命令字节的八个SCLK周期后,一个 数据字节在该输出的下降沿输出接下来的八个SCLK周期.请注意,要传输的个数据位发生在后一位之后的个下降沿的命令字节被写 入.额外的SCLK周期会在无意中发生数据字节时重新传输只要CE仍然很高.该操作允许连续突发模式读取能力.另外,I / O引脚是三态 的,在SCLK的每个上升沿发表.数据从位0开始输出.突发模式通过寻址31位十进制数可以为时钟/日历或RAM寄存器指定突发模式 (地址/命令位1至5 =逻辑1). DS1302如前所述,位6指定时钟或RAM,位0指定读取或写.时钟/日历寄存器中的位置9到31或位置31中 没有数据存储容量 RAM寄存器.在突发模式下读取或写入个寄存器,以便数据到达被转移.但是,在突发模式下写入RAM时,不需要为数据写入全部31个字节转让.无论是否写入全部31个 字节,写入的每个字节都将传输到RAM.时钟/日历时间和日历信息是通过读取适当的寄存器字节获得的.表3说明了RTC寄存 DS1302有主电源的情况下维护时间和日期.该 DS1302采用V CC1 或V CC2中 的较大者工作 . 当V CC2 大于V CC1 +时 0.2V,V CC2 为 DS1302供电. 当V CC2 小于V CC1时 ,V CC1 为 DS1302. 2 X1 3 X2标准32.768KHZ石英晶体的连接.内部振荡器是设计用于使用具有6PF 的指定负载电容的晶体进行操作.有关晶体选择和晶体布局注意事项的更多信息,请参阅应用笔记58:达拉斯实时时钟的晶体注意事 项 .该 DS1302也可以由外部32.768KHZ振荡器驱动.在这配置,X1引脚连接到外部振荡器信号和X2引脚漂浮. 4 GND地面五 CE输入.在 读取或写入期间,CE信号必须置为高电平.这个针有一个内部40K Ω(典型值)下拉电阻接地.注意:以前的数据表修订简称CE RST. 引脚的功能没有改变. 6 I / O输入/推挽输出. I / O引脚是3线的双向数据引脚接口.该引脚有一个内部40K Ω(典型值)下拉电阻接地. 7 SCLK输入. SCLK用于同步串行接口上??的数据移动.这个引脚有一个内部40K Ω(典型值)下拉电阻接地. 8 V CC1单电源和电池供电 系统中的低功耗操作以及低功耗,电池备份.在使用涓流充电器的系统中,可充电电池能源连接到此引脚. UL认可,以确保逆向充电 电流与锂电池一起使用
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
下面首先给出基本的接口软件 然后举例说明各种功能的应用
1 写保护寄存器操作
当写保护寄存器的最高位为 0 时 允许数据写入寄存器 写保护寄存器可以通过命令字节 8E
规定禁止写入/读出 写保护位不能在多字节传送模式下写入
Write_Enable:
MOV Command,#8Eh ;命令字节为 8E
MOV ByteCnt,#1 ;单字节传送模式
对 Vcc1 有可选的涓流充电能力 双电源管用于主电源和备份电源供应 备份电源管脚可由电池或大容量电容输入 附加的 7 字节暂存存储器
1 DS1302 的基本组成和工作原理 DS1302 的管脚排列及描述如下图及表所示
1
管脚描述
X1 X2
32.768KHz 晶振管脚
GND
地
RST
复位脚
I/O
数据输入/输出引脚
MOV ByteCnt,#1
;单字节传送模式
MOV R0,#XmtDat
数据地址覆给 R0
MOV XmtDat,#80h
数据内容为 80h 禁止写入
ACALL Send_Byte
调用写入数据子程序
RET
返回调用本子程序处
以上程序调用了基本数据发送(Send_Byte)模块及一些内存单元定义, 其源程序清单在附录中给出 下面 的程序亦使用了这个模块
DS1302 涓流充电时钟保持芯片的原理与应用
摘要 本文概括介绍了 DS1302 时钟芯片的特点和基本组成 通过实例详细说明了有关功能的应用 软件 关于 DS1302 各寄存器的详细位控功能请参考 DALLAS 达拉斯 公司的相应产品资料
概述 DS1302 是 DALLAS 公司推出的涓流充电时钟芯片 内含有一个实时时钟/日历和 31 字节静态 RAM 通过简 单的串行接口与单片机进行通信 实时时钟/日历电路提供秒 分 时 日 日期 月 年的信息 每月的天 数和闰年的天数可自动调整 时钟操作可通过 AM/PM 指示决定采用 24 或 12 小时格式 DS1302 与单片机之 间能简单地采用同步串行的方式进行通信 仅需用到三个口线 1 RES 复位 2 I/O 数据线 3 SCLK 串行时钟 时钟/RAM 的读/写数据以一个字节或多达 31 个字节的字符组方式通信 DS1302 工作时功耗很 低 保持数据和时钟信息时功率小于 1mW DS1302 是由 DS1202 改进而来 增加了以下的特性 双电源管脚用于主电源和备份电源供应 Vcc1 为可 编程涓流充电电源 附加七个字节存储器 它广泛应用于电话 传真 便携式仪器以及电池供电的仪器仪表等 产品领域 下面将主要的性能指标作一综合 z 实时时钟具有能计算 2100 年之前的秒 分 时 日 日期 星期 月 年的能力 还有闰年调整的能力 z 31 8 位暂存数据存储 RAM z 串行 I/O 口方式使得管脚数量最少 z 宽范围工作电压 2.0 5.5V z 工作电流 2.0V 时,小于 300nA z 读/写时钟或 RAM 数据时 有两种传送方式 单字节传送和多字节传送 字符组方式 z 8 脚 DIP 封装或可选的 8 脚 SOIC 封装 根据表面装配 z 简单 3 线接口 z 与 TTL 兼容 Vcc=5V z 可选工业级温度范围 -40 +85 z 与 DS1202 兼容 z 在 DS1202 基础上增加的特性
分单元内容为 59h 时单元内容为 13h 日期单元内容为 21h 月单元内容为 06h 星期单元内容为 03h 年单元内容为 00h 写保护单元内容为 00h 调用写入数据子程序 返回调用本子程序处
读出寄存器 0-7 的内容 程序设置如下
Read_Multiplebyte:
MOV Command,#0BFh ;命令字节为 BFh
4. 单字节传送方式 例如 写入 8 时 12 小时模式 Write_Singlebyte:
MOV Command,#84h MOV ByteCnt,#1 MOV R0,#XmtDat MOV XmtDat,#88h ACALL Send_Byte RET
程序设置如下
; 命令字节为 84h ; 单字节传送模式
MOV ByteCnt,#8
;多字节读出模式 此模块为 8 个
MOV R1,#RcvDat
数据地址覆给 R1
ACALL Receive_Byte
调用读出数据子程序
RET
返回调用本子程序处
以上程序调用了基本数据接收(Receive_Byte)模块及一些内存单元定义, 其源程序清单在附录中给
出 下面的程 序亦使用了这个模块
CH=1
振荡器停止
WP: 写保护位
WP=0
寄存器数据能够写入
WP=1
寄存器数据不能写入
寄存器 2 的第 7 位 12/24 小时标志 bit7=1,12 小时模式 bit7=0,24 小时模式
寄存器 2 的第 5 位:AM/PM 定义 AP=1 下午模式 AP=0 上午模式
TCS: 涓流充电选择
DS: 二极管选择位
2 时钟停止位操作
当把秒寄存器的第 7 位 时钟停止位 Osc_Enable:
MOV Command,#80h MOV ByteCnt,#1 MOV R0,#XmtDat MOV XmtDat,#00h ACALL Send_Byte RET
设置为 0 时 起动时钟开始
; 命令字节为 80 ; 单字节传送模式
数据地址覆给 R0
MOV XmtDat,#80h
数据内容为 80h 振荡器停止
ACALL Send_Byte
调用写入数据子程序
RET
返回调用本子程序处
HT1380 进入低功耗方式
3. 多字节传送方式
当命令字节为 BE 或 BF 时 DS1302 工作在多字节传送模式 8 个时钟/日历寄存器从寄存器 0 地址开
始连续读写从 0 位开始的数据 当命令字节为 FE 或 FF 时 DS1302 工作在多字节 RAM 传送模式 31 个
RAM 寄存器从 0 地址开始连续读写从 0 位开始的数据
例如 写入 00 年 6 月 21 日 星期三 13 时 59 分 59 秒 程序设置如下
Write_Multiplebyte:
TCS=1010 使能涓流充电
DS=01 选择一个二极管
TCS=其它 禁止涓流充电
DS=10 选择两个二极管
DS=00 或 11, 即使 TCS=1010, 充电功能也被禁止
RS 位 00 01 10 11
电阻 没有 R1 R2 R3
典型位 没有 2K 4K 8K
2
DS1302 与微控制器的接口软件及功能应用举例
SCLK
串行时钟
Vcc1,Vcc2
电源供电管脚
订单信息
部分#
描述
DS1302 串行时钟芯片 8 脚 DIP
DS1302S 串行时钟芯片 8 脚 SOIC 200mil
DS1302Z 串行时钟芯片 8 脚 SOIC 150mil
管脚配置
2. DS1302 内部寄存器
CH: 时钟停止位
CH=0
振荡器工作允许
数据地址覆给 R0 数据内容为 88h 调用写入数据子程序 返回调用本子程序处
上面所列出的程序模块 Write_Enable
Write_Disable
Osc_Enable
Osc_Disable
与单字节写入模块 Write_Singlebyte 的程序架构完全相同 仅只是几个入口参数不同 本文是为了强调功
能使用的不同才将其分为不同模块 另外,与涓流充电相关的设定也是单字节操作方式,这里就不再单独列出,
用户在使用中可灵活简略
5
MOV Command,#0BEh ;命令字节为 BEh
MOV ByteCnt,#8
;多字节写入模式 此模块为 8 个
MOV R0,#XmtDat
数据地址覆给 R0
MOV XmtDat,#59h
秒单元内容为 59h
4
MOV MOV MOV MOV MOV MOV MOV ACALL RET
XmtDat+1,#59h XmtDat+2,#13h XmtDat+3,#21h XmtDat+4,#06h XmtDat+5,#03h XmtDat+6,#0 XmtDat+7,#0 Send_Byte
MOห้องสมุดไป่ตู้ R0,#XmtDat
数据地址覆给 R0
MOV XmtDat,#00h
数据内容为 0 写入允许
8F 来
3
ACALL Send_Byte RET
调用写入数据子程序 返回调用本子程序处
当写保护寄存器的最高位为 1 时 禁止数据写入寄存器
Write_Disable:
MOV Command,#8Eh ;命令字节为 8E
数据地址覆给 R0 数据内容为 0 振荡器工作允许 调用写入数据子程序 返回调用本子程序处
当把秒寄存器的第 7 位 时钟停止位 设置为 1 时 时钟振荡器停止
Osc_Disable:
MOV Command,#80h
;命令字节为 80
MOV ByteCnt,#1
;单字节传送模式
MOV R0,#XmtDat