无人机数据传输系统-手册
无人机操作指南技术手册
无人机操作指南技术手册1. 前言无人机最初是军事行业的产物,通过技术的发展,它们已成为了许多行业的实用工具,如航拍、地质勘测、物流等。
有些人会因为缺乏足够的无人机操作知识而对这些无人机感到恐惧。
本手册旨在向初学者介绍无人机的基本知识和操作要点,以便他们在使用无人机的过程中更加安全和放心。
2. 无人机简介无人机是一种通过遥控器或自主飞行的小型飞机。
无人机的分类有很多种,如四轴、六轴、八轴等。
四轴无人机控制简单,学习成本和价格较低,更加适合初学者。
3. 飞控(飞行控制系统)飞控是一个重要的组成部分,它控制的是整个无人机的飞行。
主要负责控制无人机的姿态、飞行高度、飞行速度等。
初学者在选择飞控时要注意以下几点:(1)飞控必须与无人机的电机和螺旋桨相匹配;(2)飞行控制器上的飞行模式和遥控器上的模式相同;(3)学习曲线平稳的飞控更加适合初学者。
4. 遥控器遥控器是用来操控无人机的设备。
初学者可以选择价格较低的入门级遥控器,并且注意下面的事项:(1)遥控器适合自己的手感;(2)遥控器和飞控必须兼容;(3)遥控器的频率和通道数越多,控制效果会越好。
5. 电池和充电器电池是无人机的动力源,而充电器则用来充电。
使用电池时需要注意以下几点:(1)电池适合无人机,兼容性更好;(2)电池有足够的电量和更长的续航能力;(3)选用信誉好、安全的品牌和充电器。
6. 实际操作中需要注意的事项6.1 熟悉设备初学者在飞行之前应熟悉无人机的各个部分,安装好电池和螺旋桨。
确认无人机和遥控器是正常的。
6.2 确定飞行区域确定飞行区域的安全性和可靠性,不要在人口密集的区域和建筑物密集的区域飞行。
6.3 校准加速器和陀螺仪飞行之前应校准飞控上的加速器和陀螺仪。
这个过程可以减小误差并确保飞行的稳定。
6.4 飞行高度和速度在飞行过程中要注意控制飞行的高度和速度,尤其是在近距离飞行的情况下。
高度和速度的过度变化会使无人机不稳定,从而有飞行事故的风险。
无人机上行链路数据传输方案

吉 林 大 学 学 报 ( 工 学 版 )J o u r n al of J i li n U n iver s it y ( Engi n eering a n d Tech nolo g y Editio n )第 40 卷 第 1 期 2010 年 1 月Vol . 40 No . 1 J a n . 2010无人机上行链路数据传输方案熊海良1 ,孙德春1 ,田红心1 ,杨 宏1 ,2 ,易克初1(1 . 西安电子科技大学 综合业务网理论及关键技术国家重点实验室 ,西安 710071 ; 2 . 中国空间技术研究院总 体部 ,北京 100094)摘 要 :为保证无人飞机在动态环境下数据传输的稳定性和可靠性 ,提出了一种循环正交 M 元扩频上行链路数据传输方案。
按此方案传输数据 ,发送信号不存在潜在的周期性 ,系统的抗 干扰和抗截获性能得到了很好的保障 。
在动态环境中 ,由于载体具有较大的加速度 ,载波多普 勒频移剧烈变化 ,普通接收机载波跟踪环极易失锁 ,故提出一种基于经验值查表的载波跟踪算 法 ,在锁频环内引入经验值查找表 ,环路能自适应调整环路滤波器带宽 ,从而实现任意时刻的 高精度载波跟踪 。
关键词 :通信技术 ;无人机 ;循环正交 M 元扩频 ;载波跟踪 中图分类号 : TN 914 文献标志码 : A 文章编号 :167125497 (2010) 0120276205Upl i n k data transmission sc heme f or un manned aerial vehicl eXIO N G Hai 2lia n g 1, SU N De 2ch u n , T I A N Ho n g 2xi n 1, Y A N G Ho n g1 ,2, YI Ke 2c h u1( 1 . S t a te Ke y L abo rat o r y o f I nte g rate d S e r v i ce N et w o rks , X i d i a n U n i v e r s i t y , X i ’a n , 710071 Chi n a ; 2 . Chi n a A c a d em yo f S p a ce Tec h n ol o g g , 100094 Chi n a )Abstract : A no v el up l i n k dat a t r a n s mi s sio n sche m e ba s ed o n cycle 2o r t h o g o n al M 2a r y sp e ct r u m sp rea di ng wa s p ropo se d fo r unma nned ae rial ve hicle s ( U A V s ) . A cco r di ng to t h i s sc he me , po t e n ti alp e rio dicit y i n t h e t ra n s miti ng si gnal i s eli mi nat ed a nd t h e dat a i s ha r d to det ect o r i nt e r cep t wit hco nve ntio nal t ec h nolo gie s , t h u s t h e a nt i 2ja mmi ng a nd a nti 2i nt ercep ti ng cap a bilit ie s of t h e syst e m ca nbe ac hieve d. In t he dyna mic ci rcu m st a nce , t he great m o ve sp eed a n d acceleratio n of t he ca r ri er re s ult si n dra stic va riatio n i n ca r rie r wa ve Dopp ler f reque ncy s hif t s , w hich ma ke s t he t racki ng loop of ge n e r al receiver s o ut of bala nce . A F PL L t r ac ki ng sc he me ba se d o n loo k 2up t a ble s ( L U T ) wa s p r opo s ed ,w h ich a d op t s a li s t of e mpi r ical val u e s i n FL L a n d t h e ba n dwi d t h of t h e loop f ilt e r i n FL L ca n be a d j u s t e d a d ap t ivel y . A s a re s ult , a mo r e p r eci s e t r ac k i n g ca n be at t a i n e d at a n y ti m e .K ey w ords : co mmunicatio n t e c h n olo g y ; un m a n ne d sp r ea d sp e ct r u m ; ca r rier t r acki n gaerial ve h icle ( U A V ) ; cycle 2o r t h o g o n al M 2a r y 随着战场电子战技术的不断发展 ,无人机数 据传输面临的电子对抗形势日趋严峻。
无人机的通信与数据传输技术

案例二:无人机在农业数据传输中的应用
01 02
农业监测
无人机搭载高分辨率相机,获取农田的高清图像,通过通信与数据传输 技术将图像实时传输到农户或农业专家手中,帮助他们准确了解作物健 康、土壤状况等。
精准农业
基于无人机传输的数据,农户可制定更加精准的种植、施肥和灌溉计划 ,提高农业生产效率。
03
数据驱动决策
卫星通信是通过卫星作为中继站,使地球上不同地点之间实 现通信的技术。卫星通信系统由卫星、地面站和传输设备组 成,卫星在空中轨道上充当中继站,实现信号的接收、放大 和转发。
卫星通信特点
卫星通信具有覆盖范围广、通信距离远、可靠性高等优点, 使得无人机能够在复杂环境中实现实时通信和数据传输。
5G通信技术
影视拍摄
无人机可以用于拍摄电影、电视剧等。
广告宣传
无人机可以用于商业宣传,如广告拍摄、活动宣传等。
04
无人机的通信与数据传输 的未来发展趋势
6G通信技术的影响
6G网络将为无人机提供更高速 度、更低延迟和更高可靠性的通 信服务,促进无人机在各个领域
的应用和发展。
6G通信技术将为无人机提供更 高的数据传输速率,以满足无人 机在高清视频传输、实时图像传
安全性问题的挑战与解决方案
要点一
安全性问题
要点二
解决方案
无人机通信与数据传输技术涉及信息安全、隐私保护等问 题,如何保障信息的安全性和隐私性是一大挑战。
采用先进的加密技术和安全防护措施,保障信息的安全性 和隐私性;加强技术研发和管理,提高整个系统的安全性 ;开展安全风险评估和管理,及时发现和处理潜在的安全 隐患。
数据传输的安全性
加密认证
通过使用加密算法和认证协议,确保数据传输的安全性和完整性。
无人机运行手册飞行器信号传输与像传输技术
无人机运行手册飞行器信号传输与像传输技术随着科技的发展,无人机在日常生活和商业领域中的应用越来越广泛。
作为一种新兴的航空器,无人机的飞行需要多种技术的支持,其中信号传输与像传输技术是至关重要的。
本文将从这两个方面对无人机运行手册进行详细讨论。
信号传输技术是无人机飞行中不可或缺的一环。
无人机需要接收来自地面控制台或遥控器发送的信号,以指导其飞行方向、高度和速度等参数。
在无人机的运行过程中,稳定可靠的信号传输技术可以保证其安全飞行。
因此,在使用无人机前,操作人员必须熟悉信号传输技术的原理和操作方法。
首先,无人机运行手册中应包含信号传输技术的基本概念。
操作人员需要了解信号传输的原理,包括信号的发送、接收和处理过程。
此外,还需要理解不同频率、波段和编码方式对信号传输的影响,以便根据具体情况做出相应的调整。
其次,无人机运行手册中应包含信号传输技术的操作指导。
操作人员需要清楚地了解如何正确地连接和设置遥控设备,以确保信号传输的稳定性。
同时,还需要学习如何调整信号频率和功率等参数,以最大程度地提高信号传输的效率和可靠性。
除了信号传输技术,像传输技术也是无人机飞行中不可或缺的一部分。
像传输技术是指无人机拍摄的图像或视频数据传输到地面控制台或其他设备的过程。
在无人机的运行过程中,像传输技术可以为操作人员提供清晰的视觉反馈,帮助他们监控无人机的飞行状态和环境变化。
在无人机运行手册中,像传输技术的内容应包括如何激活和设置相机设备、如何拍摄高清图像或视频以及如何传输图像或视频数据等方面的指导。
操作人员需要学习如何正确地操作相机设备,拍摄高质量的图像或视频,并将数据传输到地面控制台或其他设备中。
只有掌握了像传输技术,操作人员才能及时、准确地获取无人机拍摄的数据,并做出相应的飞行决策。
综上所述,信号传输与像传输技术是无人机运行手册中至关重要的内容。
只有操作人员熟练掌握了这两项技术,才能保证无人机的安全、高效飞行。
因此,在掌握无人机的基本操作技能的基础上,操作人员还需要深入学习和理解信号传输与像传输技术。
无人机产品手册

无人机产品手册
无人机产品手册是为了帮助用户更好地了解和使用无人机而设计的,包含了无人机的所有重要信息和使用指南。
以下是一个无人机产品手册的基本内容:
1. 产品概述:简要介绍无人机的类型、功能和应用领域,以及产品的特点和优势。
2. 产品规格:详细列出无人机的各项规格参数,包括机身尺寸、重量、飞行时间、最大飞行速度、控制距离等。
3. 结构组成:介绍无人机的整体结构和各部分组件,如机身、机翼、电池、摄像头等。
4. 工作原理:阐述无人机的工作原理,包括飞行控制系统、导航系统、传感器等的工作原理。
5. 使用步骤:详细介绍无人机的使用步骤,包括起飞、飞行控制、降落等操作。
6. 安全须知:介绍使用无人机时需要注意的安全事项,如遵守飞行规则、避免干扰敏感区域等。
7. 维护保养:提供无人机的日常维护和保养建议,以确保其正常工作和延长使用寿命。
8. 常见问题及解决方案:列出无人机可能出现的问题和解决方法,方便用户自行排查和解决。
9. 售后服务:提供公司的售后服务政策、保修期限和维修服务网点等信息。
10. 附录:包含有关无人机的其他重要信息,如相关法规、术语解释等。
以上是一个无人机产品手册的基本内容,具体内容可根据产品的特点和用户需求进行调整和补充。
在编写无人机产品手册时,需要注意语言简练明了,图文并茂,方便用户阅读和使用。
无人机解决方案操作手册

无人机数据处理完整解决方案操作手册目录1产品特点 (1)1。
1无人驾驶小飞机项目情况简介 (2)1.2数据处理软件技术指标 (3)1.3硬件设备要求 (3)1。
4处理软件要求 (3)1。
5数据要求 (3)2数据处理操作流程 (4)2.1数据处理流程图 (4)2。
2空三加密 (4)2。
2.1启用软件FlightMatrix (4)2。
2.1。
1创建Flightmatrix工程42.2。
1。
2设置工程选项参数42。
2.1.3自动化处理 (7)2.2。
1.4DA TMatrix交互编辑 (8)2。
2.1.5调用PA TB进行平差解算 (9)2。
3生成DEM、DOM (10)2.4镶嵌成图 (10)2。
4。
1启用软件EPT (10)2。
4。
1.1导入MapMatrix工程生成DOM镶嵌工程122。
4。
1。
2编辑镶嵌线152.5图幅修补 (16)2。
6创建DLG,进行数字测图 (17)1产品特点1)空三加密1.可根据已有航飞POS信息自动建立航线、划分航带,也可手动划分航带。
2.完全摒弃传统航测提点和转点流程,可不依赖POS信息实现全自动快速提点和转点,匹配同影像旋偏角无关,克服了小数码影像排列不规则、俯仰角、旋偏角等特别大的缺点.即使是超过80%区域为水面覆盖,程序依旧能匹配出高重叠度的同名像点,整个测区连接强度高。
3.直接支持数码相机输出的JPG格式或TIF格式,无需格式转换。
4.无需影像预旋转,横排、纵排都可实现自动转点,节约数据准备时间.5.实现畸变改正参数化,方便用户修正畸变改正参数,不需要事先对影像做去畸变即可完成后续4D产品生产。
6.除无人机小数码影像外,还适用于其它航空影像。
7.空三加密支持无外业像控点模式,方便快速制作挂图,满足相关需求。
8.专门针对中国测绘科学研究院二维检校场和武汉大学遥感学院近景实验室三维检校场检校报告格式研发了傻瓜式批处理影像畸变差改正工具,格式对应,检校参数直接填入,无需转换,方便空三成果导入到其他航测软件进行后续处理。
md系列四旋翼无人机系统mdCockpit软件用户手册

md4系列四旋翼无人机系统mdCockpit软件用户手册佛山市安尔康姆航拍科技有限公司2011年6月目录目录 (1)1. 概述 (5)1.1. 安全提示 (7)1.2. 许可条款 (9)1.3. 系统要求 (10)1.4. 软件安装 (12)2. mdCockpit的组件及操作 (14)2.1. mdCockpit 对话框 (概述) (15)2.2.语言支持 (16)2.3. 设备管理 (18)2.4. 3D飞行航线视图 (19)2.5. 绘图图表 (22)2.6. 显示控件 (26)2.7.属性窗口 (28)3. 航点编辑器 (29)3.1. 航点编辑器的主要对话框 (31)3.2. 航点编辑器的菜单栏 (31)3.3. 航点编辑器的工具栏 (32)3.4.航点编辑器的地图窗口 (33)3.5. 航点编辑器的属性窗口 (39)3.5.1. 总体属性 (航线属性) (40)3.5.2. 背景属性 (44)3.5.3. 地图图片属性 (46)3.5.4. 航点属性 (47)3.5.5. 航线属性 (53)3.5.6. 多航点属性 (56)3.5.7. 兴趣点属性 (58)3.5.8. 飞行器的其它设置 (59)3.5.9. GIS栅格功能的自动代码及属性 (61)3.5.10. 环绕兴趣点飞行的自动代码及属性 (63)3.5.11. 把一条航线分割成短航线的自动代码 (65)3.5.12. 闭合航线的自动代码 (66)3.6. 导入地图图片及坐标配准 (67)3.6.1. 从Google Earth™ 导入地图图片 (68)3.6.2. 从文件中导入地图图片 (71)3.7. 导出飞行路径 (74)3.8. 航点及航点任务 (74)3.9. 航线规划 (75)3.10. 航点命令生成器 (79)3.11. 航点命令参照表 V2.7 (80)4. 下行链路解码器 (84)4.1. 下行链路解码器对话框 (84)4.2. 下行链路解码器目录栏 (87)4.3. 下行链路解码器工具栏 (87)4.4.下行链路解码器语音提示 (90)4.5. 下行链路解码器对话框页面 (94)4.5.1. 下行链路解码器对话框页面1的视频模式 (97)4.5.2. 下行链路解码器所有对话框页面的可用性 (97)4.6. 在线模式 (99)4.7. 重放模式 (100)4.8. 飞行记录及数据记录 (100)4.9. 支持HID输入设备及控制模块 (100)5. SD卡飞行记录 (101)5.1. 飞行数据分析对话框 (101)5.2. 数据记录格式 (103)5.3. 分析对话框的目录栏 (104)5.4. 分析对话框的工具栏 (105)5.5. 对话框页面介绍 (106)5.5.1. 三维飞行路径 (108)5.5.2. 播放器、模拟飞行 (110)5.5.3. 比较 (112)5.5.4. 飞行姿态显示 (113)5.5.5. 高度、速度、距离及风速预计 (114)5.5.6. FC/NC状态分析及工作模式 (115)5.5.7. 诊断、FC/NC错误、 SD卡统计数据及分析状态 (116)5.5.8. 航点 (119)5.5.9. 数值表 (120)5.5.10. 飞行数据 (125)5.5.11. 自动飞行分析 (128)5.5.12. 电机性能曲线 (138)5.5.13. 遥控指令 (139)5.5.14. 加速度分析 (140)5.5.15. 陀螺仪 (141)5.5.16. 磁力计 (142)5.5.17. GPS分析、电池放电图、温度评估 (143)6. 其它界面 (144)6.1. mdCockpit 管道服务器 (144)6.1.1. 详细的命令说明 (146)6.1.2. C语言里的编程范例 (151)6.2. 飞行器控制界面 (154)6.2.1. 飞行器控制输入设备 (154)6.2.1.1. 操纵杆 (154)6.2.1.1.1. Logitech™ Attack 3 – 2D 操纵杆 (154)6.2.2. microdrones PPM9_USART界面支持 (156)6.2.2.1. 自由飞行时作为遥控器使用 (156)6.2.2.2. 用于在模拟飞行及测试中控制飞行器 (156)6.2.2.3. 与mdCockpit终端对话框使用的PPM9_USART模块 (156)6.2.3. GSM及UMTS调制解调器的支持 (158)7. 设置、维护及服务 (159)7.1. 终端通讯 (159)7.1.1. 终端对话框的工具栏 (159)7.1.2. 终端对话框的界面管理 (161)7.1.3. 终端通讯对话框的全文本编辑器 (162)7.1.4. 侧栏及编译器 (163)7.1.5. 飞控板参考命令 (164)7.1.6. 导航板参考命令 (166)7.2. 设置 (167)7.2.1. 配置对话框的工具栏及菜单栏 (167)7.2.2. 对话框页面说明 (167)7.3. 常见问题解答 (178)1. 概述为了提高及实现四旋翼飞行器的增值服务,安尔康姆公司设计了应用程序mdCocopit,通过用户界面支持四旋翼飞行器的所有功能。
无人机传输系统用户手册说明书
多旋翼专业级无人机使用手册专注应急通信,持续引领创新版权所有不得复制目录一、免责声明 (3)二、无人机—飞行器 (4)2.1、无人机组成 (4)2.2、无人机接口图示 (6)2.3、挂载安装 (7)三、无人机—智能遥控器 (8)四、挂载介绍 (10)4.1无人机—变焦云台(30倍) (11)4.2无人机—机载喊话器 (14)4.3无人机—抛投器 (19)4.4无人机—探照灯 (21)4.5无人机—锂聚合物电池及电池充电器 (23)五、智能遥控器使用说明 (28)六、飞行安全 (36)七、起飞准备 (38)7.1.静态检查 (38)7.2.安装电池及起落架 (38)7.3.安装挂载 (40)7.4.安装机臂 (40)7.5.参数检查 (41)7.6.挂载控制 (45)八、无人机起飞 (46)九、飞机降落 (48)十、常见问题解答 (48)十一、法律法规 (49)售后服务 (50)一、免责声明危险首先感谢您使用慧明捷科技有限公司无人机设备。
它融合了高科技精华、外观精美、图传覆盖面积广。
希望它能给您的工作带来无限的便捷。
在使用无人机图传设备前,请仔细阅读本须知,一旦使用即被视为本声明内部已经全部认可与接受。
请严格遵守用户手册安装和使用该产品。
特别声明:由于本产品新手操作,十分危险。
飞行员必须经过慧明捷科技有限公司的培训,并且在考核通过之后才能操作。
在未通过考核便擅自操作的情况下所造成的损害或损伤,慧明捷科技有限公司将不承担相应的损失及赔偿责任。
警告请把电器部件放在儿童触及范围之外;确保飞行器飞行时远离人群及危险物品,建议您在专用的飞行场地飞行;切勿在饮酒、疲劳或其他精神状态不佳的情况下进行任何操作;请严格按产品手册进行操作;飞行前请确保供电系统及其他功能模块连接正确,否则可能造成设备的烧毁;遥控器通道校准、固件升级、参数设置前请关闭动力电源或取下螺旋桨,防止电机突然高速旋转;切勿在恶劣环境下飞行;请勿改变机架的结构,如改变,后果自负1.本产品为特殊控制物项,用户将为使用本产品的一切行为负全部责任,对于直接或间接使用本产品造成的后果厂家不承担任何责任。
思翼 HM30 全高清数字图传 用户手册说明书

HM30全高清数字图传用户手册V1.22021.12感谢您购买思翼科技的产品。
HM30是基于思翼科技全自主研发的高清图传技术开发的一款1080P 30公里级高清图像传输系统,延迟低至150毫秒,功能丰富、性能强劲,可以广泛应用于固定翼FPV飞行,无人机、无人车船以及机器人等领域的图像数据传输与控制。
考虑到飞行安全,也为了带给您良好的HM30使用体验,请您在装机/飞行前仔细查阅用户手册。
本手册可以帮助您解决大部分的使用疑问,您也可以通过访问思翼科技官方网站()与HM30相关的页面,致电思翼科技官方售后服务心(400-8382918)或者发送邮件到****************直接向思翼科技工程师咨询产品相关知识以及反馈产品问题。
思翼科技官方QQ群微信扫一扫获取技术支持目录阅读提示 (6)标识、图标 (6)飞行安全 (6)电池 (8)设备闲置、携带、回收 (8)1 产品简介 (9)1.1 产品特性 (9)1.2 部件说明 (11)1.2.1 产品概览 (11)1.2.2 通道 (11)1.2.3 地面端接口示意图 (12)1.2.4 天空端端接口示意图 (13)1.2.5 OLED功能显示定义 (13)1.3 技术参数 (14)1.4 物品清单 (16)1.5 状态指示灯定义 (17)1.5.1 地面端指示灯定义 (18)1.5.2 天空端指示灯定义 (19)2 使用前 (20)2.1 地面端开机与充电 (20)2.1.1 地面端开机、关机 (20)2.1.2 充电步骤 (20)2.1.3 充电指示灯定义 (21)2.2 提升通讯距离与视频流畅性重要说明 (21)2.2.1 HM30使用注意事项 (21)2.2.2 不同飞行距离天线选用以及无线模式设置 (22)2.2.3 HM30地面端标配全向天线安装说明 (23)2.2.4 HM30地面端平板定向天线安装说明 (23)2.2.5 HM30天空端标配全向天线安装说明 (23)3 MENU系统菜单 (25)3.1 SETTINGS功能设置 (25)3.1.1 天空端编号 (27)3.1.2 对频 (27)3.1.3 遥控信号输入模式 (28)3.1.4 数传输出模式 (29)3.1.5 数传波特率 (31)3.1.6 天线追踪波特率 (32)3.1.7 失控保护 (33)3.1.8 RSSI通道 (34)3.1.9 无线模式 (34)3.1.10 视频输出模式 (36)3.2 图传与WiFi链路信息 (38)3.2.1 图传链路信息 (38)3.2.2 WiFi链路信息 (39)3.3 数传遥控链路信息 (40)3.4 设备信息 (41)3.5 Mavlink信息 (42)4 数传 (43)4.1 通过蓝牙与地面站无线通信(以QGroundControl为例) (43)4.2 通过UDP与地面站无线通信(以QGroundControl为例) (45)4.3 通过UART接口连接PC或AAT有线通信 (46)4.4 通过Type-C接口连接PC有线通信(以Mission Planner为例) (47)4.5 数传无法连接的解决方法 (48)5 “SIYI FPV”应用 (49)5.1 设置菜单 (49)5.2 链路信息 (50)5.3 关于思翼FPV (51)6 图传 (52)6.1 使用思翼网口摄像头 (52)6.2 使用第三方网口相机或吊舱 (52)6.3 使用HDMI相机连接方法 (53)6.4 双路视频输入连接方法 (54)6.4.1 连接两个思翼网口相机 (54)6.4.2 连接两个第三方网口相机/吊舱 (55)6.4.3 连接一个思翼HDMI模块和一个思翼网口相机 (55)6.4.4 连接一个思翼HDMI模块和一个第三方网口相机/吊舱 (55)6.4.5 连接两个思翼HDMI模块 (55)6.5 设备常用参数 (56)6.6 HM30地面端图像输出 (57)6.6.1 通过内置WiFi输出到安卓移动设备(以SIYI FPV应用为例) (57)6.6.2 通过USB网卡输出到安卓移动设备(以SIYI FPV应用为例) (58)6.6.3 通过Type-C输出(以SIYI FPV应用为例) (58)6.6.4 通过LAN口输出视频到PC端 (59)6.6.5 通过LAN口转HDMI输出视频 (60)6.7 无法显示视频图像的解决方法 (62)6.7.1 WiFi输出图像在移动设备显示 (62)6.7.2 USB输出图像在移动设备显示 (64)6.7.3 WiFi或LAN输出图像在Windows设备显示 (65)7 固件与升级 (67)7.1 HM30功能固件升级 (67)7.2 HM30地面端HDMI输出模块升级FPV系统 (69)8 售后与保修 (70)8.1 返修流程 (70)8.2 保修政策 (70)8.2.1 7天包退货 (71)8.2.2 15天免费换货 (72)8.2.3 一年内免费保修 (73)阅读提示标识、图标在阅读用户手册时,请特别注意有如下标识的相关内容。
铱星9523大数据量数传终端使用说明
联系人:刘先生
电话:13837358332
QQ: 296916350 Email:wuxinkuaiyu169@
铱星 9523 大数据量数据传输、定位终端
说明书声明
重要提示! 请认真阅读本手册,有助于你更全面、深入地了解铱星移动通信网络的优势和特 点,以及铱星数据拨号(dial-up data service)和短数据SBD (shor t burst data)业务所 给你带来的经济、高效、可靠的数据传输特点。也有助于你更清晰使用本产品,从而 为您全球范围内的数据传输和定位跟踪服务提供帮助。
2
铱星 9523 大数据量数据传输、定位终端
欢迎使用可覆盖全球的 基于铱卫星通信网络的数据传输、定位跟踪终端。
铱卫星(Iridium)系统 铱(Iridium)系统是由 66 颗环绕地球的低轨卫星网组成的全球卫星移动通信系统。是地 面固定电话网和移动电话网的延伸和补充。铱系统是唯一可以实现在南北两极通信的卫星通 信系统。铱系统最大的优势是其良好的覆盖性能,可达到全球覆盖,基本上能实现任何人、 在任何时间、任何地方、可以与任何方式与任何人进行通信。可向用户提供话音、数据 2.4kbps、 传真 2.4kbps。 关口站(铱星网关)是提供铱系统业务和支持铱系统网络的地面设施。它提供移动用户、 漫游用户的支持和管理,通过 PSTN 提供铱系统3网络到其它电信网的连接。
雷迅创新Air Link用户手册说明书

Air Link用户手册Air Link用户手册V1.02019.09Air Link用户手册相关资料CUA V官网官网可以找到最新的产品资料。
CUA V官网网址:。
CUA V文档中心:。
下载CUA V地面站浏览器地址输入/client。
直接选择对应的客户端进行下载使用。
下载Mission Planner地面站浏览器地址输入/planner/docs/mission-planner-installation.html。
下载QGroundControl地面站浏览器地址输入https:///en/getting_started/download_and_install.html。
Air Link用户手册目录产品概述5简介5外观描述5功能描述7上手使用7设备绑定10地面站使用12说明12CUA V GS-Android12非攻地面站-Windows16非攻透传-Windows20第三方地面站使用24QGroundControl地面站24Mission Planner地面站27附录30规格参数30相关问题31设备还原与升级32Air Link用户手册产品概述本章主要介绍Air Link的功能特点,指导如何正确使用产品,以及了解产品的功能描述。
Air Link用户手册产品概述简介Air Link属于基于雷迅云平台的无人机通讯链路产品,Air Link数传。
基于公网4G/3G/2G网络,将无人机数据实时通过网络传输到CUAV Cloud平台,真正实现不受控制距离限制的操控效果。
用户可以通过CUAV通用账号绑定无人机上的Air Link设备,一个账户可以绑定多个设备,通过CUAV客户端或自定义客户端进行无人机的控制。
在后续,雷迅云的不断完善。
用户可以通过相应的方式享受雷迅云平台的团队权限分配、日志存储、后台管理等丰富的功能。
敬请期待。
外观描述Air Link用户手册Air Link用户手册功能描述Air Link数传支持实时无人机数据功能。
无人机数据传输系统-手册

1.概论:无人机,即无人驾驶的飞机。
是指在飞机上没有驾驶员,只是由程序控制自动飞行或者由人在地面或母机上进行遥控的飞机。
它装有自动驾驶仪、程序控制系统、遥控与遥测系统、自动导航系统、自动着陆系统等,通过这些系统可以实现远距离飞行并得以控制。
无人机与有人驾驶的飞机相比而言,重量轻、体积小、造价低、隐蔽性好,特别宜于执行危险性大的任务,因此被广泛应用。
二、无人机的特点及技术要求无人机没有飞行员,其飞行任务的完成是由无人飞行器、地面控制站和发射器组成的无人机系统在地面指挥小组的控制一下实现的。
据此,无人机具有以下特点:(1)结构简单。
没有常规驾驶舱,无人机结构尺寸比有人驾驶飞机小得多。
有一种无尾无人机在结构上比常规飞机缩小40%以上。
重量减轻,体积变小,有利于提高飞行性能和降低研制难度。
(2)安全性强。
无人机在操纵人员培训和执行任务时对人员具有高度的安全性,保护有生力量和稀缺的人力资源。
可以用来执行危险性大的任务。
(3)性能提高。
无人机在设计时不用考虑飞行员的因素。
许多受到人生理和心理所限的技术都可在无人机上使用,从而突破了有人在机的危险,保证了飞行的安全性。
(4)一机多用,稍作改进后发展为轻型近距离对地攻击机。
(5)采用成熟的发动机和主要机载设备,以减少研制风险与经费投入,加快研制进度。
联合研制以减小投资风险、解决经费不足有利于扩大出口及扬长技术与设备优势。
(6)研制综合训练系统。
技术要求有:(1)信息技术包括信息的收集和融合,信息的评估和表达,防御性的信息战、自动目标确定和识别等;(2)设备组成包括低成本结构、小型化及模块化电子设备、低可见性天线、小型精确武器、可储存的高性能发动机及电动作动器等;(3)性能实现包括先进的低可见性和维护性技术、任务管理和规划、组合模拟和训练环境等。
三、无人机系统按照功能划分,主要包括四部分:(1)飞行器系统包括空中和地面两大部分。
空中部分包括:无人机、机载电子设备和辅助设备等,主要完成飞行任务。
民用无人机多通道数传交换系统设计

民用无人机多通道数传交换系统设计1. 引言1.1 研究背景民用无人机在航空领域中的应用越来越广泛,其中数据传输的效率和稳定性成为无人机系统设计中的重要问题。
当前市场上常见的无人机多通道数传交换系统大多集成简单,容易受到干扰和信道拥塞的影响,导致传输数据的稳定性和效率不高。
设计一种稳定高效的无人机多通道数传交换系统至关重要。
在无人机操作中,为了保障实时性数据传输的需求,传统的单通道数据传输已无法满足,多通道数据传输逐渐成为发展的趋势。
而如何设计一种适用于民用无人机的多通道数传交换系统,具有高效稳定的数据传输效果,成为当前研究的关键问题。
有必要开展对民用无人机多通道数传交换系统的设计与研究,以满足无人机系统在复杂环境下的数据传输需要。
在这样的背景下,本文旨在探讨民用无人机多通道数传交换系统设计原理及其功能模块设计,以及对该系统进行性能测试和优缺点分析,最终展望未来研究的方向。
通过本文的研究,将为民用无人机系统设计和应用提供新的思路和参考。
1.2 研究意义民用无人机的广泛应用已经成为现代社会中不可或缺的一部分,而无人机的通信系统对其性能和功能起着至关重要的作用。
本文旨在设计一种具有多通道数传交换系统的民用无人机,以提高其数据传输的效率和稳定性。
该系统通过设计多通道数传模块和数据交换模块,实现了对数据传输的多通道处理和快速交换,从而提高了无人机的通信能力和可靠性。
研究意义在于,随着无人机应用领域的不断扩大,对其通信系统的要求也在不断提升。
传统的单通道数传系统已经无法满足日益增长的数据传输需求,因此设计一种具有多通道数传交换系统的民用无人机对于提高其整体性能和应用范围具有重要意义。
通过本文的研究,将为无人机通信系统的发展和改进提供新的思路和方法,为无人机在各个领域的应用提供更加可靠和高效的通信支持。
通过系统性能测试和实验验证,还可以进一步验证该系统的可靠性和实用性,为无人机技术的进一步发展提供有力支持。
2. 正文2.1 无人机多通道数传交换系统设计原理无人机多通道数传交换系统设计原理是基于现有的通信技术和数据传输技术,结合无人机的特点和需求,通过多通道设计实现同时传输多条数据流,提高数据传输效率和稳定性。
铱星9523,9602数传终端的使用说明
安全提示! ♦ 请不要自行拆开本产品,如有问题请将产品返回厂家处理。 ♦ 请使用直流电源为本产品供电,电源切勿反接,输入电源切勿超出本手册规定的规 定范围。 ♦ 如确有超出本手册规定电源输入范围的需求,可以定制,采购时请说明。 ♦ 所有连接到本产品连接器的输入也应在安全的范围内。 ♦ 产品内含较贵重的器件,请不要拆卸,跌落,撞击或修改。 ♦ 产品应在低温干燥环境下保存。不要将产品浸渍在水中。 ♦ 本产品内部含有连接天线的无线发射装置,该天线会产生无线电辐射能量,操作时 天线要放置在距离人体至少 0.3 米之外。
3
铱星数据传输、定位终端
目录
一、产品概述 ............................................................................................................................................. 5 二、应用领域 ............................................................................................................................................. 7 三、性能特点 ............................................................................................................................................. 8 四、技术指标 ............................................................................................................................................. 9 五、安装说明 ........................................................................................................................................... 10
md4系列四旋翼无人机系统快速操作手册
md4系列四旋翼无人机系统快速操作手册佛山市安尔康姆航拍科技有限公司2011年6月一、起飞前的准备1、飞行器动力电池:用电池电量显示仪对电池进行测试,对于md4-200显示参数须高于16.5V,对于md4-1000,显示参数须高于25V。
2、遥控器:每次飞行时一定要把遥控器电池充满电,保证不会因为电量的原因导致遥控器无法控制飞行器;遥控器的频率必须飞行器接收机的频率一致,否则,飞行器无法手动起飞;3、地面站电脑:携带足够的设备电池,保证地面站电脑的电池能满足该次作业的要求,不要出现在飞行过程中地面站电脑电量不足而关机的情况;4、地面站供电:地面站承担着解码飞行器下传数据的重要任务,一旦断电,则无法显示任何数据,这样会对安全飞行带来隐患;5、任务载荷:如果是携带相机或摄像机,需保证该设备的电量及存储卡的容量。
6、飞行环境:md4-200要求风速小于6米/秒,md4-1000要求风速小于12米/秒,周围环境空旷(起飞点离障碍物的距离应保持在20米以上),对GPS 信号和磁力计不存在干扰(详情下文有说明)。
二、飞行相关1、将飞行器放置在平坦的地面,保证机体平稳,起飞地点尽量避免有沙石、纸屑等杂物;2、打开遥控器电源,为飞行器插入充满电的电池,自检通过后,飞行器会每隔两秒发出一声“滴”的响声,表示正处于搜索GPS信号状态;3、打开地面站软件mdCockpit,弹出下行数据回放页面,重点观察GPS信号跟设备状态。
GPS信号的确认:观察地面站软件的下行链路解码器界面,保证GPS的定位精度不高于4米,如右图红框部分所示。
设备状态的确认:该步骤主要检查磁力计、GPS及SD卡的工作状态,正常模式如下图:4、遥控器摇杆动作的分配:图15:摇杆动作的分配A、把遥控器的F键往上推到头,启动旋翼,360度转动或前后左右推拉右侧摇杆,观察各旋翼的工作状态并使飞行器尽快定位起飞位置。
注意:在飞行过程中,切不可将F键拉回原位!!!B、通过左侧摇杆的油门通道(上下方向)慢慢的加大电机的转速,待旋翼储存足够的升力后,飞行器慢慢离地。
(完整版)无人机设计手册及主要技术

无人机设计手册及主要技术内容简介独家《无人机设计手册》分上、下两册共十二章。
上册包括无人机系统总体设计,气动、强度、结构设计,动力装置,发射与回收系统,飞行控制与管理系统。
下册包括机载电气系统,指挥控制与任务规划,测控与信息传输,有人机改装无人机,综合保障设计,可靠性、维修性、安全性和环境适应性以及无人机飞行试验等。
有关无人机任务设备、卫星中继通信的设计以及正在发展的无人机技术等内容,有待手册再版时编入,使无人机设计手册不断成熟和丰富。
适用人群本手册是国内第一部较全面系统阐述无人机设计技术的工具书,不仅可作为无人机的设计参考,也可以作为院校无人机教学、无人机行业的工程技术人员和管理人员的参考书,并可供无人机部队试验人员使用。
希望本手册的出版能对我国无人机研制工作的技术支持有所裨益。
作者简介祝小平,现任西北工业大学无人机所总工程师,主要从事无人机总体设计、飞行控制与制导系统设计等研究工作。
主持了工程型号、国防预研等国家重点项目多项,获国家和部级科学技术奖9项,其中国家科技进步一等奖1项,国防科技进步一等奖4项,获技术发明专利10项,荣立“国防科技工业武器装备型号研制”个人一等功,发表论著150多篇。
先后入选国家级“新世纪百千万人才工程”、国防科技工业“511人才工程”和教育部“新世纪优秀人才支持计划”,获得“ 国防科技工业百名优秀博士、硕士”、“国防科技工业有突出贡献的中青年专家”、“陕西省有突出贡献专家”和“科学中国人(2009)年度人物”等荣誉称号。
无人机相关GJB标准-融融网gjb 8265-2014 无人机机载电子测量设备通用规范gjb 4108-2000 军用小型无人机系统部队试验规程gjb 5190-2004 无人机载有源雷达假目标通用规范gjb 7201-2011 舰载无人机雷达对抗载荷自动测试设备通用规范gjb 5433-2005 无人机系统通用要求gjb 2347-1995 无人机通用规范gjb 6724-2009 通信干扰无人机通用规范gjb 6703-2009 无人机测控系统通用要求gjb 2018-1994 无人机发射系统通用要求无人机主要技术一、动力技术续航能力是目前制约无人机发展的重大障碍,业内人士也普遍认为消费级多旋翼续航时间基本维持在20min左右,很是鸡肋。
无人机云系统与交换系统数据接口说明、飞行管理数据传输消息头和消息编号说明
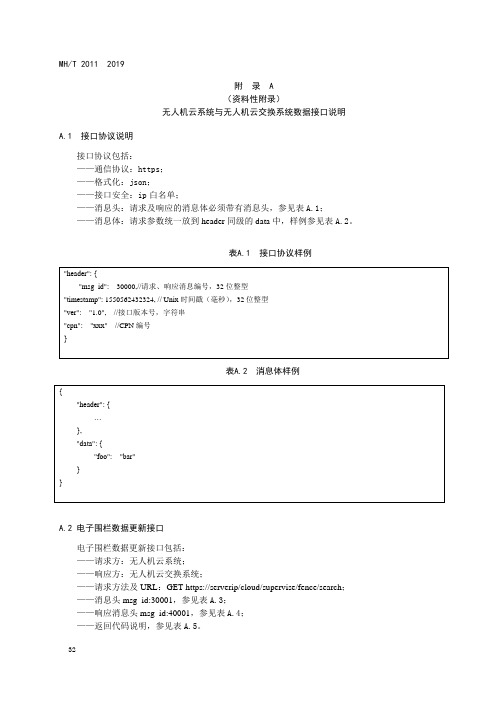
附 录 A(资料性附录)无人机云系统与无人机云交换系统数据接口说明 A.1 接口协议说明接口协议包括:——通信协议:https;——格式化:json;——接口安全:ip白名单;——消息头:请求及响应的消息体必须带有消息头,参见表A.1;——消息体:请求参数统一放到header同级的data中,样例参见表A.2。
表A.1 接口协议样例"header": {"msg_id": 30000,//请求、响应消息编号,32位整型"timestamp": 1550562432324, // Unix时间戳(毫秒),32位整型"ver": "1.0", //接口版本号,字符串"cpn": "xxx" //CPN编号}表A.2 消息体样例{"header": {…},"data": {"foo": "bar"}}A.2 电子围栏数据更新接口电子围栏数据更新接口包括:——请求方:无人机云系统;——响应方:无人机云交换系统;——请求方法及URL:GET https://serverip/cloud/supervise/fence/search;——消息头msg_id:30001,参见表A.3;——响应消息头msg_id:40001,参见表A.4;——返回代码说明,参见表A.5。
表A.3 请求内容样例{"header" : {"msg_id":30002…}, //头信息"data": {"current_fence_version": 1550562432324 //当前电子围栏版本,//版本号由无人机交换系统生成。
//使用unix时间戳(毫秒)。
无人机的数据传输技术

无人机的数据传输技术
无人机的数据传输技术一般采用无线电技术,主要有以下几种:
1. Wi-Fi技术:Wi-Fi技术是一种基于IEEE 80
2.11标准的无线网络技术,可以实现短距离的无线数据传输,可以实现无人机与地面站之间的实时数据传输。
2. 蓝牙技术:蓝牙技术是一种低功耗的无线通信技术,可以实现短距离的无线数据传输,可以实现无人机与地面站之间的实时数据传输。
3. 红外线技术:红外线技术是一种用于在短距离内传输信号的技术,可以实现无人机与地面站之间的实时数据传输。
4. 卫星通信技术:卫星通信技术是一种用于在大距离内传输信号的技术,可以实现无人机与地面站之间的实时数据传输。
5. 微波技术:微波技术是一种用于在中等距离内传输信号的技术,可以实现无人机与地面站之间的实时数据传输。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.概论:无人机,即无人驾驶的飞机。
是指在飞机上没有驾驶员,只是由程序控制自动飞行或者由人在地面或母机上进行遥控的飞机。
它装有自动驾驶仪、程序控制系统、遥控与遥测系统、自动导航系统、自动着陆系统等,通过这些系统可以实现远距离飞行并得以控制。
无人机与有人驾驶的飞机相比而言,重量轻、体积小、造价低、隐蔽性好,特别宜于执行危险性大的任务,因此被广泛应用。
二、无人机的特点及技术要求无人机没有飞行员,其飞行任务的完成是由无人飞行器、地面控制站和发射器组成的无人机系统在地面指挥小组的控制一下实现的。
据此,无人机具有以下特点:(1)结构简单。
没有常规驾驶舱,无人机结构尺寸比有人驾驶飞机小得多。
有一种无尾无人机在结构上比常规飞机缩小40%以上。
重量减轻,体积变小,有利于提高飞行性能和降低研制难度。
(2)安全性强。
无人机在操纵人员培训和执行任务时对人员具有高度的安全性,保护有生力量和稀缺的人力资源。
可以用来执行危险性大的任务。
(3)性能提高。
无人机在设计时不用考虑飞行员的因素。
许多受到人生理和心理所限的技术都可在无人机上使用,从而突破了有人在机的危险,保证了飞行的安全性。
(4)一机多用,稍作改进后发展为轻型近距离对地攻击机。
(5)采用成熟的发动机和主要机载设备,以减少研制风险与经费投入,加快研制进度。
联合研制以减小投资风险、解决经费不足有利于扩大出口及扬长技术与设备优势。
(6)研制综合训练系统。
技术要求有:(1)信息技术包括信息的收集和融合,信息的评估和表达,防御性的信息战、自动目标确定和识别等;(2)设备组成包括低成本结构、小型化及模块化电子设备、低可见性天线、小型精确武器、可储存的高性能发动机及电动作动器等;(3)性能实现包括先进的低可见性和维护性技术、任务管理和规划、组合模拟和训练环境等。
三、无人机系统按照功能划分,主要包括四部分:(1)飞行器系统包括空中和地面两大部分。
空中部分包括:无人机、机载电子设备和辅助设备等,主要完成飞行任务。
地面部分包括:飞行器定位系统、飞行器控制系统、导航系统以及发射回收系统,主要完成对飞行器的遥控、遥测和导航任务,空中与地面系统通过数据链路建立起紧密联系。
(2)数据链系统包括:遥控、遥测、跟踪测量设备、信息传输设备、数据中继设备等用以指挥操纵飞机飞行,并将飞机的状态参数及侦察信息数据传到控制站。
(3)任务设备系统包括:为完成各种任务而需要在飞机上装载的任务设备。
(4)后勤保障系统如检测设备,维修设备,运输设备,后勤设备等。
2 无人机的飞行控制与测控数据传输无人机的测控数据传输均采用无线通信方式将遥控信息由地面站发送至无人机称为无线遥控(上行通道)。
无人机将飞行中的各种状态信息发给地面站称为无线遥测(下行通道)。
无线数据传输系统的核心问题主要是单/双无线通道的选择、电台的选择、天线的选择和安装姿态。
3.1双无线通道与单无线通道的比较遥控遥测独立分别采用各自的电台、天线、无线频点称之为双无线通道的测控系统。
优点是时序独立互相之间没有影响但存在一些严重问题:上行、下行分别采用无线通道于是地面和机上就都有了二套电台、天线、频率地面系统虽然增加了操作的工作量但并无大碍。
而机上系统设备增加使系统复杂、重量加大却是一个严重的问题。
无人机的重量增加是影响起飞、空速、续航时间的一个重要原因。
系统复杂又必然造成可靠性降低。
在靶机上要放置二根天线一般只能垂直尾翼上放一根在水平副翼上放一根这样这两个天线极化方向是不同的而地面站架设的天线则是二根天线全是垂直放置必然造成其中一路通信效果变差。
结果总是出现一路通信距离近的问题.遥控遥测共用同一套电台、天线、无线频点采用时分工作方式称为单无线通道的测控系统。
它的优点是简化了机上设备的数量和线路的复杂性降低了无人机整机重量同时机上天线与地面天线极化方向相同大大提高了通信距离。
但这种测控系统对电台的可靠性要求更高。
本文工作开始前无人机的测控系统主要采用双无线通道的方式设备复杂遥控遥测距离近的问题一定存在。
3.2 无人机飞行的无线通道无人机的无线通道分为无线遥控(上行)通道和无线遥测(下行)通道。
无线遥控(上行)通道完成遥控指令、参数信息等数据的传输。
指令:地面站发给电台经地面天线发射机上天线接收后电台将指令发给飞行控制系统飞行控制系统接收到指令后交给遥测系统已接收指令该指令执行后又将交给遥测系统已执行指令。
参数(原点、飞行参数、航路信息):地面站发给电台经地面天线发射机上天线接收后电台将参数发给飞行控制系统飞行控制系统接收到参数后存入掉电保持的存储器然后再从存储器中读出参数交遥测系统发回地面。
供地面站校验。
无线遥测(下行)通道完成无人机飞行过程中各状态参数的收集并发送给地面站。
在调参时也负责回传参数信息。
3.3 无人机飞行控制器飞行控制器是负责飞行控制系统信号的采集、控制律的解算、飞机的姿态和速度以及与地面设备的通讯等工作。
飞行控制器控制设备由传感器操作面板数据及算术处理设备和电源组成通信控制设备由编码器/解码器控制通信控制盒和自动跟踪控制器组成。
无人机数据采集及测控系统集成了模拟、数字、通讯总线、时间码等无人机上通用的各种航电信号采集和测试功能。
无人驾驶仪的控制系统进行测试主要完成包括对控制系统的各个硬件(传感器、敏感元件、执行机构等)、自动驾驶仪以及中间装置的参数特性、动态过程监测以及控制系统的航空专用总线。
飞控器是以单片机为核心的计算机控制系统其功能是实现由输入信息的含义决策输出信息的过程简单地说是信息处理过程其输入信息主要是指遥控接收送来的指令信息当然也含故障应急处理信息。
根据输入信息来决策输出控制及遥测显示信息。
因此其功能主要有:1)保持飞机按给定的高度稳定飞行2)保持飞机按预定的航线稳定飞行3)控制飞机按给定的航向角飞行4)控制飞机按给定的姿态角机动飞行5)控制飞机按预定程序自主飞行6)随着高度和速度的变化自动改变控制系统7)采集飞行状态参数送至遥测发射系统8)进行故障应急处理9)完成飞机开关指令功能对任务设备的控制其中1)~5)、9)条是飞控器根据地面遥控指令切换不同控制模态来实现第6)、7)、8)条由飞控器自行完成。
飞行控制器采用了三种控制方式、四个反馈回路、五种控制模态来完成控制。
(一)控制方式三种控制方式是:无线电指令控制下的自动模态飞行方式、无线电遥控静默下的全自主飞行控制方式以及程控飞行方式。
(二)反馈回路四个反馈回路:a.以TC-3D垂直陀螺仪构成的反馈回路构成飞行姿态稳定与控制的内回路。
这是飞行控制系统的核心控制回路。
靶机的转弯、爬升、下滑飞行是由内回路给定相应参考姿态角来实现的。
b.以磁航向传感器信号作为反馈信号送到无人机的横向控制通道上构成飞行航向控制的外回路。
c.以气压高度传感器的输出信号作为反馈信号送到无人机的纵向控制通道上构成飞行航向控制的外回路。
d.以气压高度传感器的输出信号作为反馈信号送到无人机的纵向控制通道上构成飞行高度的外回路。
d.以GPS接收机接收到的靶机位置和飞行速度信息通过信息融合后反馈遥控接收飞控器舵机舵面,启动飞机姿态,遥测发射敏感元件重心为测量仪遥控发射地面操纵人、地面,遥测接收机到横向控制通道上进一步提高航迹的控制精度。
在反馈回路中以阻尼、带宽、静差、容错性为要点进行回路的反馈控制参数设计以增强飞行控制系统全飞行包络的控制鲁棒性。
(三)控制模态飞控系统采用了五种控制模态即:三轴稳定控制模态、高度保持模态、航向保持模态、自动导航模态、自动归航模态。
模态之间的切换时机主要是由地面遥控人员通过指令来实现的而在飞行控制系统中则是通过调整控制参数、切换给定参考变量来实现。
三轴稳定模态即为垂直陀螺仪控制模态飞机无论处于什么指令下飞控器接通垂直陀螺仪。
高度保持模态:即飞控器接通“垂直陀螺仪+高度传感器”的控制模态。
当飞机收到“纵平”指令后即接通高度传感器当飞机收到“爬升”或“俯冲”指令时切断高度传感器。
航向保持模态:即飞控器接通“垂直陀螺仪+高度传感器+航向传感器”的控制模态。
当飞机收到“远航”或是“返航”指令后即接通航向传感器当飞机收到“横平”指令时切断航向传感器。
自动导航模态:当飞机收到“程控”指令时飞行控制器将自动引导飞机飞行在预设的航路上。
用“横平”指令解除“程控”。
归航模态:即飞控器接通“垂直陀螺+高度传感器+航向传感器+GPS”控制模态。
当飞机接收到“归航”指令或是飞机在30秒内没有接收到地面的遥控信号(包括空指令信号)时飞控器转入归航模态飞控器从内存中调出起飞点的坐标不断进行比较引导飞机朝起飞点上空飞行到达起飞点后盘旋3分钟然后自动开伞回收。
在此过程中随时可以通过“横平”指令来解除“归航”模态。
4.1无人机的数据链路4.11 概述无人机的数据链路用于在无人机飞行过程中,连接飞行,器平台和地面操控指挥人员与设备的信息桥梁,基本功能,是传递地面遥控指令,采油接收无人机的飞行,状态信息和传感器获取的情报信息。
无人机数据路的概念如图4-1所示。
无人机数据链路在功能上包括一条用于地面控制站对飞行器及机上设备控制的上行链路(也叫指挥链路)和一条用于接收无人机下行链路。
上行链路一般带宽为10Kb/s-200Kb/s,无论何时地面控制站请求发送命令,上行链路必须保证随时传送。
下行链路提供两个通道。
一条是用于向地面控制站传递当前的飞行速度、发动机转速以及机上设备状态等信息的状态信道(也称遥测信道),该信道需要较小的带宽,类似于指挥链路。
第二条信道用于向地面控制站传递传感器信息,它需要足够的带宽传送大量的传感器信息,带宽范围为300Kb/s-10Mb/s。
一般下行链路都,是连续传送的,但有时也会临时启动以传送机上暂存的等待发送的数据。
数据链路也可用于测量地面天线相对于飞行器的距离和方位,这些信息可用于无人机的导航,提高机载传感器对目标位置的测量精度。
4.2.2 数据链路的结构与原理无人机数据链路一般由机载部分和地面部分组成。
数据链路的机载部分包括机载数据终端(ADT)和天线。
机载数据终端RF接收机、发射机以及用于连接接收机和发射机到系统其余部分的调制调解器。
有些机载数据终端为了满足带宽的要求,还提供压缩数据处理。
天线采用全向天线,有时也采用具有增益的有向天线。
数据链的地面部分包含地面数据终端(GDT)和一副,或几副,天线。
GDT包含RF接收机和发射机以及调制调解器。
若传感器信息在传输前经过压缩,那么地面数据终端还需采用处理器对数据进行重建。
数据压缩和重建可以分装成几个部分,一般包括一辆天线车(可以放在离无人机地面控制占有一定距离的地方)、一条连接地面天线和地面控制站的本地数据连线,以及地面控制站中的若干处理器和接口。
无人机数据链路地面部分的工作原理如图4-2所示。