起重机的电气控制系统设计
桥式起重机电气控制系统设计
1 引言(或绪论)1.1 课题简介本次毕业设计课题为“20/5t桥式起重机电气控制系统设计”。
其主要任务是将接触—继电器控制的传统桥式起重机利用PLC进行改造.用到的实验台是THJPES-2型机床PLC电气控制实训考核装置,所以本次任务的重点是完成模拟实验.本次设计的控制部分主要是西门子S7—200 PLC系统,并结合STEP7软件进行了简单的控制编程。
1.2桥式起重机在现代工业中的发展情况桥式起重机是现代工业生产和起重运输中实现生产过程机械化、自动化重要的工具和设备.所以桥式起重机在室内外工矿企业、钢铁化工、铁路交通、港口码头以及物流周转等部门和场所均得到广泛的运用。
经过多年的发展,我国桥式起重机的应用不断扩大,随着技术进步,针对实际中桥式起重机的恶劣工作坏境及长时间超负荷作业而导致的事故,为桥式起重机改造提出了新的要求,以便在实际操作更加安全、更加高效。
1.3PLC在工业自动控制中的应用可编程程序控制器简称PLC,是微机技术与继电器常规控制技术相结合的产物,是在顺序控制器和微机控制器的基础上发展起来的新型控制器,是一种以微机处理器为核心用作数字控制的专用计算机。
它不仅充分利用微处理器的优点来满足各种工业领域的实时控制要求,同时也照顾到现场电器操作维护人员的技能和习惯,摒弃了微机常用的计算机编程语言的表达形式,形成一套以继电器梯形图为基础的形象编程语言和模块化的软件结构,使用户程序的编制清晰直观、方便易学,调试和查错都很简单。
PLC现已成为现代工业控制三大支柱(PLC、CAD/CAM、ROBOT)之一,以其可靠性、逻辑功能强、体积小、可在线修改控制程序、具有远程通讯联网功能等优异性能,日益取代由大量中间继电器组成的传统继电—接触器控制系统在机械、化工、冶金等行业中的重要作用。
PLC的应用深度和广度已经成为一个国家工业先进水平的重要标志之一.微电子技术与计算机技术的结合,使PLC 的功能变得更加强大,通过可编程控制的实现,为PLC 增添了使用上的灵活性。
起重机电气设计规范
当所选电动机额定功率Pn=PN时,H的物理意义是: 只要所选电动机的最大转矩倍数λm≥H,则过载校验 通过,或者说,在Pn=PN时,H的取值是对所选电 动机转矩倍数的最小要求值。因为,所选电动机的 λm=2.2时,考虑最大运行转矩与颠覆转矩间留30% 的安全距离,该电动机能够输出最大起动转矩为: Mmax=λm×MN/1.3=2.2×MN/1.3≈1.7MN 这就是H=2.2的来源。 从过载校验公式(87)可以看出,仅从过载能力要 求来讲,所选电动机额定功率值与其最大转矩过载 倍数是可以相互转化的。
《 二、电气保护 三、控制系统 四、电机选择
附录P:电机初选
附录R:电机过载校验 附录S:电机发热校验 五、装置及电阻器选择
一、电源与供电
对电网电压波动范围按GB5226.2中4.3.2交
流电源的电压波动范围规定为:在正常工作 条件下,供电系统,在起重机械馈电线接入 处的电压波动不应超过额定值的±10%的要 求,但FEM标准中规定为±5%,建议在应用 中尽可能要求用户的供电电源符合±5%的国 际通用要求。
3)电动机初选: 根据用户要求采用西门子变频电动机,折算到S1 工作制下的功率为: PS1≥P40/1.2=142/1.2=118.3(kw) 选取:1LG4318—8AB 132 kw S1
运行机构电动机初选 1)计算稳态运行功率: PN=PJ×VY/1000/η/m 2)计算S3 JC=40%基准工作制下所需的电动机的 功率值:Pn≥K PN 式中:K——综合运行速度所体现的作业频繁 程度和惯性功率对发热影响的综合因素系数, 见表2。
起升机构电动机过载校验举例 例1:对起升机构电动机初选中的例1进行过载校验。 已知:额定起重量105t,额定起升速度6m/min, η=0.87,m=1台,电动机:1LG4318—8AB 132kw S1 λm=2.9。 按过载校验公式计算: Pn≥H/m/λm×PQ×Vq/1000/η =2.2/2.9×105×6/6.12/0.87=90KW
桥式起重机电气控制系统(1)

2020/11/20
桥式起重机电气控制系统(1)
桥式起重机电气控制系统
3
4
5
2
6
9 1
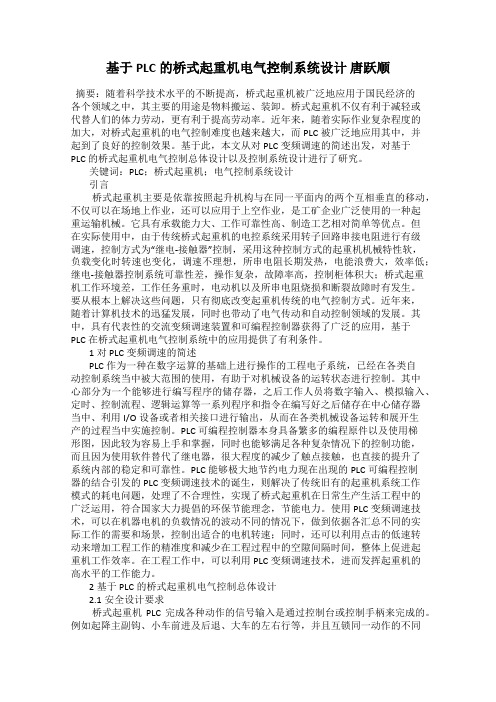
桥式起重机示意图
1-驾驶室 2-辅助滑线架 7 3-交流磁力控制盘 4-电阻箱 5-起重小车
8
6-大车拖动电动机 7-端梁 8-主滑线 9-主梁
桥式起重机电气控制系统(1)
桥式起重机电气控制系统
桥式起重机电气控制系统(1)
10t桥式起重机典型电路
主电路介绍:
Q1~Q3为凸轮控制器 YB为断电抱闸制动装置电磁铁线圈 KM用于电路保护
合上QF →凸轮控制器Q1~Q3均在零位时,按 动启动按钮→ KM线圈通电、触点闭合;
通过操作Q1~Q3可分别驱动电动机M1~M4工作, 实现大、小车的移动和吊钩的提升/下降。
桥式起重机电气控制系统(1)
卷扬机主电路
卷扬机为位能 性负载。采用绕线 式异步电动机转子 串五级不对称电阻, 以满足起动和调速 的基本要求。
凸轮控制器Q1 有零位,左、右各 五档工作位置;12 对触头。
触头Q10~Q13 用于正反转控制。
桥式起重机电气控制系统(1)
ห้องสมุดไป่ตู้
卷扬机主电路
触点Q14~Q18 用于短接转子电阻。
用于绷紧钢丝绳的 预备级或提升空钩和轻 载。以及在倒拉反接制 动状态下,低速下放位 能负载。
桥式起重机电气控制系统(1)
1、主钩提升运动:
② 重物提升 Q1转至向上位
置2、3、4、5时, 转子电阻依次减小, 提升速度依次提高。 (负载转矩加大)
桥式起重机电气控制系统(1)
1、主钩提升运动:
③ 低速提升重物的方法
桥式起重机电气控制设计说明书

起重机电气控制设计说明书专业题目桥式起重机电气控制设计姓名班级指导教师1.题目:起重量/跨度桥式起重机电器控制设计2.设计内容通过对桥式起重机的学习,按实际要求对起重机各机构电气控制进行设计,培养学生用所学理论知识解决实际问题的能力。
3.设计要求1)设计计算说明书1份2)桥式起重机总电路原理图1张,各机构控制图在说明书上体现.课程设计题目及原始数据:说明:1.大车运行机构的工作级别与起升机构相同,选M5,小车运行机构的工作级别为M5;2.表中所列速度要求,在计算后所得的实际数值可允许有15%的偏差.8T桥式起重机电气控制设计摘要桥式起重机是桥架在高架轨道上运行的一种桥架型起重机,又称天车。
桥式起重机的桥架沿铺设在两侧高架上的轨道纵向运行,起重小车沿铺设在桥架上的轨道横向运行,构成一矩形的工作范围,就可以充分利用桥架下面的空间吊运物料,不受地面设备的阻碍。
桥式起重机广泛地应用在室内外仓库、厂房、码头和露天贮料场等处。
桥式起重机可分为普通桥式起重机、简易粱桥式起重机和冶金专用桥式起重机三种。
普通桥式起重机一般由起重小车、桥架运行机构、桥架金属结构组成。
起重小车又由起升机构、小车运行机构和小车架三部分组成。
起升机构包括电动机、制动器、减速器、卷筒和滑轮组。
电动机通过减速器,带动卷筒转动,使钢丝绳绕上卷筒或从卷筒放下,以升降重物。
本文重点研究起重机的控制,通过使用串电阻的调速方法已实现对电机的控制,从而控制起重机。
关键词:起重小车;电动机;串电阻调速目录1.起重机控制系统方案选择…………………………………………2.电机容量选择及调速电阻器计算…………………………………2.1电机容量选择……………………………………………………2.1.1提升机构电机容量选择……………………………………2.1.2大车行走机构电机容量选择………………………………2.1.3 小车行走机构电机容量选择……………………………2.2调速电阻器计算…………………………………………………2.2.1起升机构调速电阻计算…………………………………2.2.2大车行走机构调速电阻器计算……………………………2.2.3小车行走机构调速电阻器计算……………………………3.起升机构控制系统………………………………………………………3.1控制系统组成………………………………………………………3.2起升机构控制电路图……………………………………………3.3起升机构的工作原理……………………………………………3.4系统的保护…………………………………………………4. 大车运行机构控制系统设计………………………………………4.1控制系统组成…………………………………………………4.2大车机构控制电路图………………………………………………5.小车运行机构控制系统设计……………………………………5.1控制系统组成……………………………………………………5.2小车机构控制电路图………………………………………………主钩以外的其他机构机构的工作原理图…………………………结论………………………………………………………………………参考文献………………………………………………………………1.起重机控制系统方案选择三相异步电动机的工作原理:当向三相定子绕组中通过入对称的三相交流电时,就产生了一个以同步转速n1沿定子和转子内圆空间作顺时针方向旋转的旋转磁场。
起重机电气设计规范(精)

能,当调速装置或正反向接触器故障导致电 动机失控时,制动器应立即抱闸 。为确保制 动器抱闸,制动接触器辅助触点应反馈至控 制系统,确认制动接触器可靠分断,否则断 开总接触器。
三、控制系统
电气控制部分在修订时,其内容包括了原
GB3811-1983,FEM相关部分的内容,同时 增加了变频调速和调压调速的说明。(对吊钩 起重机,当起升机构的工作级别为M4、M5 和M6,且额定起升速度≥5m/min时要求制动 平稳,应采用电气制动方法,保证在0.2~ 1.0G范围内下降时,制动前的电动机转速降至 同步转速的1/3以下,该速度应能稳定运行.)
3)调压调速系统在任何速度上的允许运行时 间相对于电阻器的发热时间常数来讲,均为 长期。故电阻元件的接电持续率应按100%选 用。但由于上升和下降时,机械传动效率相 反,电动机的工作电流不等,所以电阻元件 在JC=100%下的电流值为: I上= IN; I下= IN×η2。
变频调速系统
系统特点: 1)变频调速系统可实现额定频率以下恒转矩调速及 额定频率以上恒功率调速,弱磁升速范围取决于 电机允许的最高运行转速及在最高转速下输出的 转矩能否满足负载的加速要求。 2)动态特性较硬,即:动态速降小,因此适用于起 升及运行机构。运行采用变频调速较采用调压调 速系统其速度稳定性更好。 3)变频调速采用开环还是闭环控制,对于在起重机 上的应用来讲最大的差别在于闭环控制起动转矩 更大,低速运行更平稳,调速范围更宽。 一般起升采用闭环控制,运行采用开环控制。
注:M5及以下K值可选1是因为太小的K值会在负荷试 车的静载试验时,机构不能起吊1.25倍额定载荷。
3)电动机在不同工作制下功率值的折算 将S1工作制下的电动机功率值折算到 S3 JC =40%或S3 JC =60%下的电动机功率值可 参考下式折算: P40≈1.15~1.2 PS1 P60≈1.05~1.1 PS1 对于不同的电动机,其折算系数略有不同,若需 知道准确折算值,需向制造商索取
基于PLC的桥式起重机电气控制系统设计 唐跃顺
基于PLC的桥式起重机电气控制系统设计唐跃顺摘要:随着科学技术水平的不断提高,桥式起重机被广泛地应用于国民经济的各个领域之中,其主要的用途是物料搬运、装卸。
桥式起重机不仅有利于减轻或代替人们的体力劳动,更有利于提高劳动率。
近年来,随着实际作业复杂程度的加大,对桥式起重机的电气控制难度也越来越大,而PLC被广泛地应用其中,并起到了良好的控制效果。
基于此,本文从对PLC变频调速的简述出发,对基于PLC的桥式起重机电气控制总体设计以及控制系统设计进行了研究。
关键词:PLC;桥式起重机;电气控制系统设计引言桥式起重机主要是依靠按照起升机构与在同一平面内的两个互相垂直的移动,不仅可以在场地上作业,还可以应用于上空作业,是工矿企业广泛使用的一种起重运输机械。
它具有承载能力大、工作可靠性高、制造工艺相对简单等优点。
但在实际使用中,由于传统桥式起重机的电控系统采用转子回路串接电阻进行有级调速,控制方式为“继电-接触器”控制,采用这种控制方式的起重机机械特性软,负载变化时转速也变化,调速不理想,所串电阻长期发热,电能浪费大,效率低;继电-接触器控制系统可靠性差,操作复杂,故障率高,控制柜体积大;桥式起重机工作环境差,工作任务重时,电动机以及所串电阻烧损和断裂故障时有发生。
要从根本上解决这些问题,只有彻底改变起重机传统的电气控制方式。
近年来,随着计算机技术的迅猛发展,同时也带动了电气传动和自动控制领域的发展。
其中,具有代表性的交流变频调速装置和可编程控制器获得了广泛的应用,基于PLC在桥式起重机电气控制系统中的应用提供了有利条件。
1对PLC变频调速的简述PLC作为一种在数字运算的基础上进行操作的工程电子系统,已经在各类自动控制系统当中被大范围的使用,有助于对机械设备的运转状态进行控制。
其中心部分为一个能够进行编写程序的储存器,之后工作人员将数字输入、模拟输入、定时、控制流程、逻辑运算等一系列程序和指令在编写好之后储存在中心储存器当中、利用I/O设备或者相关接口进行输出,从而在各类机械设备运转和展开生产的过程当中实施控制。
10T塔吊电气控制系统设计
摘要随着改革开放的不断发展,现代化建设进入了一个全新阶段,塔式起重机需求量不断增多。
50年代初,我国塔机由仿制开始起步。
20世纪60年代,由于高层、超高层建筑的发展,广泛使用了内部爬升式和外部附着式塔式起重机,并在工作机构中采用了比较先进的技术,如直流电机调速、可控硅调速、涡流制动器,在回转和运行机构中安装液力偶合器等。
在此时期,中国开始进入了自行设计与制造塔式起重机的阶段。
本文是以满足塔式起重机的各个动作而设计的电气控制系统。
从塔式起重机的变幅动作、回转动作、起降动作和各个动作中的变速入手,根据继电—接触控制器原理和三相异步电机的变速原理设计的电气控制电路。
与加入PLC控制器的控制系统相比只由继电—接触控制器组成的电气控制系统比加入PLC 控制器的控制系统抗干扰性强,但是对塔式起重机的钢铁结构冲击较大适合用于小型塔式起重机。
此次毕业设计题目为塔式起重机电气控制系统设计,主要包括起升机构的控制,三速变化的设计,回转机构的绕线电机变速设计,小车变幅双速电机的控制设计,电器元件的选型,控制柜安装布置图,电气接线图的设计等。
关键词:塔式起重机变幅起升回转AbstractAs the ceaseless development of reforming and opening, modernization has entered a new stage, demand increased for tower crane. At the beginning of 50 time, our country started by imitation of tower crane. Nineteen sixties, due to high buildings, development, extensive use of internal climbing type and external attached tower crane, and in the working mechanism adopts a more advanced technology, such as the speed of the DC motor, the silicon controlled speed, eddy current brake, in a rotary and a running mechanism installed in hydrodynamic coupling. During this period, China began to enter its own design and manufacture of tower crane 's stage.This paper is to meet the needs of each action and design of tower crane electrical control system. From the tower crane luffing motion, rotary motion, and action and each action in the transmission of relay contact control, according to the principle of three-phase asynchronous motor and transmission principle of electrical control circuit design.With the accession to the PLC controller of the control system of relay - contact compared to only by the controller of the electrical control system than the accession to the PLC controller control system anti interference is strong, but the impact of large tower crane steel structure suitable for small tower crane.The graduation design for the tower crane electrical control system design, including the lifting mechanism control, three speed change rotary mechanism design, the motor winding gear design, trolley double speed motor control design, electrical components selection, control cabinet arranged diagram, wiring diagram design.Key Words: Tower crane luffing hoisting slewing目录摘要 (1)Abstract (2)目录 (3)第一章绪论 (5)1.1 塔式起重机设计概述 (5)1.2塔机的发展 (5)1.3传统的塔式起重机的控制现状 (5)1.4起升机构的工作原理 (6)第二章塔机总体方案设计 (7)2.1 设计要求 (7)2.2 设计任务 (7)2.3 塔机基本结构图 (7)第三章塔式起重机机构设计及其选择 (9)3.1起重机冶金用电动机 (9)3.2电动机的选择方法 (9)3.3起升机构 (10)3.3.1起升机构电动机的选择 (10)3.3.2起升机构制动器的选择 (16)3.3.3起升机构减速器的选择 (16)3.4变幅机构 (16)3.4.1变幅机构电动机的选择 (16)3.4.2变幅机构制动器的选择 (18)3.4.3变幅机构减速器的选择 (18)3.5旋转机构 (18)3.5.1旋转机构电动机的选择 (18)3.5.2旋转机构减速器的选择 (20)第四章PLC的选择与课题介绍 (21)4.1 PLC的控制原理 (21)4.2 用PLC控制塔机的优越性 (21)4.3 塔机的电气控制设计内容 (22)4.4 PLC的选型 (22)4.5塔式起重机PLC控制系统原理 (25)第五章塔式起重机电气控制的硬件设计 (26)5.1塔机电动机控制电路设计 (26)5.2 PLC的输入输出接线设计 (27)5.3流程图 (28)第六章塔式起重机控制的软件设计 (29)6.1进退机构工作设计 (29)6.2左、右行机构工作设计 (31)6.3起升机构工作设计 (33)6.5 回转机构 (35)6.5声光指示控制设计 (37)6.6 限位保护闭锁及复位操作设计 (37)总结 (38)参考文献 (39)致谢 (40)第一章绪论1.1 塔式起重机设计概述近年来,随着我国经济建设的高速增长,基本建设规模不断扩大,特别是高层建筑施工的不断增多,塔式起重机的应用愈来愈广泛,并已成为建筑施工中的一种主要水平运输和垂直运输机械。
大型冶金起重机电气控制系统的设计与实现
图 2 起重机 电气 系统控制部分
30 5 一 2m 大型 淬火桥 式起 重机 对 安全 可 2 /0t 2
量 式旋转 编 码 器 用 以 监 控 2台减 速 器 的速 度 ,在
靠性要求很高 ,需要利用 P C自身监视 每个模块 L 及 编码器 的 工作 状 态 。该起 重机 采 用 的西 门子 s 7 系列 P C系统提 供 了相 应 的故 障 中断 模块 O , L B
器 、限位 开 关 和保护 装 置等 。
控制 系 统 的核心 是 1台西 门子 S 7—3 0可 编程 0 控制 器 ,它 通 过 P o b s—D rf u i P总 线 将 C U和 2个 P
位于主梁 内的 IO子站连接在 一起 ,并通过 M I / P 总线 与 HM 人 机 界 面交 换 数 据 。HM 用 于显 示 起 1 I 重机的过程状 态和故 障信息 ,通过故 障 自诊断程 序可迅速判断故障原因。
一
布到不同的周期里去计算 ,每经过一定数量循环才 产生 1 个温度值 ,这样即可大大减小单周期 的计算
《 起重运输 机械》 加1 7 1( )
3 一 2
基于 A A D MS的折 臂 式 随 车 起 重 机 受 力计 算
王 乐有 王 进强 才冬 涛 山西 长治 清华机 械 厂 长 治 0 6 1 4 02 文 章 编号 :1 0 — 7 5 ( 0 1 7— 0 3— 2 0 1 0 8 2 1 )0 0 3 0
大型 冶 金 起 重 机 电气 控 制 系 统 的设 计 与 实现
吴 先文 李
1四川 工程 职 业技 术 学院 德阳
丽 张
丹 李
剑
680 10 0
龙门吊电气控制系统设计
龙门吊电气控制系统设计龙门吊一般采用PLC远程控制,分别设置远程分站,分别为刚退远程、柔腿远程、司机室远程、小车远程,并且配备相应的电控装置,而采用集中控制,龙门吊控制系统采用PLC集中控制,可节省调试时间,降低调试难度,提高了劳动生产率,减少了刚腿远程柜,柔腿远程柜,司机室远程柜,大大降低了电控的成本。
标签:龙门吊、电气控制系统、集中控制前言PLC控制技术在造船门吊上的应用也越来越多。
因此,我们有必要研究龙门吊的PLC控制系统,以满足用户对龙门吊的数字化、智能化、网络化和信息化的要求。
龙门吊可用于船厂船体制作场所(船坞、船台等)。
具有起升、行走、抬吊、合拢和空中翻身等多种作业功能。
龙门吊由小车主起升机构、小车运行机构、大车刚性腿机构、大车柔性腿机构、电气室、司机室、电梯组成。
起重机的控制系统经历了由传统的继电器逻辑控制系统到PLC系统发展过程,随着PLC 控制技术的发展,以及PLC系统部件价格的降低,在港口起重运输机械、造船龙门吊和大型冶金起重机械等设备已基本采用PLC控制。
PLC控制大大减少了控制设备外部的接线,使控制系统设计以及建造的周期大为缩短,同时维护变得容易起来。
1.润邦海洋ME160(2X50t+2X50t+2X10t)-45m造船龙门吊采用PLC集中控制实例(如下图)龙门吊小车起升机构、小车运行机构、大车刚性腿机构、大车柔性腿机构等,在上述四个机构中所有远程控制采用集中控制,共用一只中央处理器(CPU),通过网络连接可以节省大量现场布线;PLC系统通过通讯方式控制变频器,PLC 系统实现了对变频器的最全面的控制,同时PLC系统也实现了最大限度的读取变频器的内部状态。
在PROFIBUS网络上配置触摸屏,可以实现对整机工作状态监控和故障查询。
在设备出现复杂故障时可以迅速得到国货商的解决方案。
大大提供检修的效率。
变频器和PLC已经在大门吊系统中使用,使用网络技术可以简潔有效地将PLC控制系统与变频器结合在一起,充分发挥出变频器的优势。
门式起重机电气系统设计

门式起重机电气系统设计供电系统设计是门式起重机电气系统的基础,其主要任务是为门式起重机的控制系统提供稳定可靠的电源。
供电系统设计应首先考虑供电方式,一般可以选择布置专用的供电线路,或者选择使用电缆卷盘等设备来供电。
其次需要考虑供电电压和容量的确定,根据门式起重机的功率和负载情况,选择适当的电源电压和电流容量。
另外,还需要设计供电线路的布置和保护装置的选择,确保供电系统的安全可靠。
控制系统设计是门式起重机电气系统的核心,其主要任务是实现对门式起重机的运行、起升、行驶等动作的控制。
在控制系统设计中,需要选用合适的控制设备,如控制柜、PLC等,并设计相应的接线和布线方案。
同时,还需根据门式起重机的运行特点和要求,制定相应的控制策略,包括起升、行驶的速度和加减速度、紧急停车、限位保护等。
在控制系统设计中,还需要考虑安全保护系统的接入和联锁控制,以确保门式起重机的安全运行。
安全保护系统设计是门式起重机电气系统中非常重要的部分,其主要任务是保护门式起重机的安全运行,并防止发生事故。
在安全保护系统设计中,需要考虑起升、行驶的限位保护,包括上行限位和下行限位,以避免起升、行驶超限产生事故。
另外,还需要设计重载保护系统,以监测和控制起升电动机的负荷情况,防止起升机构超负荷运行。
此外,还需设计紧急停车系统,保证门式起重机在紧急情况下能够及时停止运行,保护工人的安全。
综上所述,门式起重机电气系统设计涉及供电系统设计、控制系统设计和安全保护系统设计三个方面。
其中,供电系统设计为控制系统提供稳定可靠的电源,控制系统设计实现对门式起重机运行的控制,安全保护系统设计保护门式起重机的安全运行。
在电气系统设计过程中,需要综合考虑门式起重机的运行特点和要求,选用合适的设备和控制策略,以确保门式起重机的安全可靠运行。
205t桥式起重机电气系统改造设计
20/5t橋式起重機電氣系統改造摘要本文分析了橋式起重機的電氣控制要求及繼電接觸器電氣控制系統的工作原理,總結了繼電接觸器電氣控制系統的不足,並利用PLC和變頻器技術,對橋式起重機的電氣控制系統進行了改造,以程式控制取代繼電器——接觸器控制,交流電動機調速方式採用變頻調速,從而實現了起重機的半自動化控制。
文中還詳細介紹了變頻器與相關配套元器件的選用方法,PLC多段速控制程式及PLC與變頻器控制系統的接線方法,橋式起重機PLC與變頻器控制系統的工作過程。
關鍵字可編程控制器變頻器起重機電氣控制系統機床改造一概述 (3)(一)设计任务分析 (4)(二)系统改造方案 (4)二、桥式起重机继电接触器电气控制系统 (5)(一)桥式起重机的主要结构及运动形式 (5)(二)桥式起重机的电气控制特点 (6)(三)、桥式起重机的对电力拖动的要求 (7)(四)20/5t桥式起重机的电路工作原理 (9)三、PLC、变频器控制系统的软硬件设计 (12)(一)PLC简介及特点 (12)(二) 变频器简介及特点 (14)(三)PLC的机型选择及变频器的机型选择 (19)(四)主钩电气控制线路 (20)八副钩电气控制线路 (23)(一)副钩电气控制线路 (23)(二)副钩I/O分配表 (23)(三)副钩梯形图 (24)九小车电气控制线路 (25)(一)小车控制线路 (25)(二)小车控制程序I/O分配表: (25)(三)小车梯形图 (26)十大车电气控制线路 (27)(一)大车控制线路 (27)(二)大车I/O分配表 (28)(三)大车梯形图 (29)结束语 (30)致谢词 (31)概述主鉤最大起重20T,副鉤最大起重5T,橋式起重機是橋架在高架軌道上運行的一種橋架型起重機,又稱天車。
橋式起重機的橋架沿鋪設在兩側高架上的軌道縱向運行,起重小車沿鋪設在橋架上的軌道橫行運行,構成一矩形的工作範圍,就可以充分利用橋架下麵的空間吊運物料,不受地面設備的阻礙。
起重机的电气控制系统

起重機的電氣控制系統起重機鋼結構負責載荷支承;起重機機構負責動作運轉;起重機機構動作的起動、運轉、換向和停止等均由電氣或液壓控制系統來完成,為了起重機運轉動作能平穩、準確、安全可靠是離不開電氣有效的傳動、控制與保護。
1.起重機電氣傳動起重機對電氣傳動的要求有:調速、平穩或快速起制動、糾偏、保持同步、機構間的動作協調、吊重止擺等。
其中調速常作為重要要求。
一般起重機的調速性能是較差的,當需要準確停車時,司機只能採取“點車”的操縱方法,如果“點車”次數很多,不但增加了司機的勞動強度,而且由於電器接電次數和電動機起動次數增加,而使電器、電動機工作年限大為縮短,事故增多,維修量增大。
有的起重機對準確停車要求較高,必須實行調速才能滿足停准要求。
有的起重機要採用程式控制、數控、遙控等,這些技術的應用,往往必須在實現了調速要求後,才有可能。
由於起重機調速絕大多數需在運行過程中進行,而且變化次數較多,故機械變速一般不太合適,大多數需採用電氣調速。
電氣調速分為二大類:直流調速和交流調速。
直流調速有以下三種方案:固定電壓供電的直流串激電動機,改變外串電阻和接法的直流調速;可控電壓供電的直流發電機———電動機的直流調速;可控電壓供電的晶閘管供電———直流電動機系統的直流調速。
直流調速具有超載能力大、調速比大、起制動性能好、適合頻繁的起制動、事故率低等優點。
缺點是系統結構複雜、價格昂貴、需要直流電源等。
交流調速分為三大類:變頻、變極、變轉差率。
調頻調速技術目前已大量地應用到起重機的無級調速作業當中,電子變壓變頻調速系統的主體———變頻器已有系列產品供貨。
變極調速目前主要應用在葫蘆式起重機的鼠籠型雙繞組變極電動機上,採用改變電機極對數來實現調速。
變轉差率調速方式較多,如改變繞線非同步電動機外串電阻法、轉子晶閘管脈衝調速法等。
除了上述調速以外還有雙電機調速、液力推動器調速、動力制動調速、轉子脈衝調速、蝸流制動器調速、定子調壓調速等等。
桥式起重机教程——桥式起重机电气控制系统

32/5桥式起重机电气控制
第一节 配电
1.配电主电路
电源由集电器取自滑线,380V,50Hz。 引到主断路器Q001上口,再由下口连接到 主接触器K001,再由主接触器下口连接到 各运行机构的断路器上口。 有些电源取自主断路器上口,例如:司 机室空调,电源指示灯。 变压器一次侧取自主断路器上口,二次 侧用于照明和电源插座等用电。 注意:配电主电路主要表示的是起重机 电源的分配,和电源的来源,主要是主断 路器1 识图
由控制线路的线号可知,其电源取自主断路 器上口,所以,在对配电控制线路进行检修时, 一定要将断路器Q007断开,防止触电。另外, Q007断开也是造成起重机不能启动故障的原因 之一。 S003为司机室急停开关,与主断路器脱口线 圈串联,闭合时脱口线圈得电。它是天车出现操 作失灵时紧急停止时使用,用于断开主断路器用。 Q001为主断路器脱扣线圈。 S001为司机室电锁开关,起重机启动时,应 处于闭合状态。起重机断电时,将电锁拧到断开 位置
1.3 断电过程 将电锁拧至断开状态或按下停止按钮,主接 触器线圈断电,主接触器断开。 注意:不建议将急停按钮用于频繁断电,建议 只用于紧急情况下的断电。急停按钮按下后,主 断路器处于跳闸状态,再次启动起重机时,必须 先将主断路器闭合。并且影响断路器使用寿命。 1.4 常见故障 起重机不启动: 检查Q001、Q007是否处于闭合状态,检查 重锤限位开关触点是否闭合,检查主接触器线圈 接线是否牢固,线圈是否损坏,检查停止按钮、 电锁开关接线是否牢固,其闭点是否接触良好, 检查主接触器自保点K001是否闭合正常。等等
S002为司机室启动按钮,S004为电气室启 动按钮,规定都为绿色按钮。S005为电气室停止 按钮,为红色。 S191、S291分别为主起升和副起升的重锤 限位开关,使用常闭点,当钩头撞击重锤时,重 锤限位开关常闭点断开,主接触器线圈失电,主 接触器断开。 1.2 启动过程 在主断路器Q001和控制回路断路器Q007闭 合的情况下,将电锁S001拧到闭合位置,按下启 动按钮S002或S004,此时,主接触器K001线 圈得电,主接触器吸合,带动自保触点K001闭合, 主接触器线圈保持闭合状态。各机构断路器上口 得电。
双梁桥式起重机-电气控制部分全新精选

湘潭大学毕业论文题目:起重机设计专业:机械设计制造及其自动化学号:姓名:指导教师:完成日期: 2010.6湘潭大学毕业论文(设计)任务书论文(设计)题目: 18t桥式起重机设计学号: 2006183918 姓名:谢伟专业:机械设计制造及其自动化指导教师:陈格平系主任:一、主要内容及基本要求最大起升重量:18t 梁跨度:31500mm 起升速度:18~28m/min 起升高度:14m 起重机运行速度:80~95m/min起升机构运行速度40~45 m/min基本要求:1 根据上述要求,设计桥式起重机;2 设计计算说明书1份;3 总装配图1张,小车装配图1张,小车架结构图1张,18t桥式起重机总电路原理图1张;4 英文资料翻译,3000单词左右二、重点研究的问题1结构设计(小车运行起升机构);2材料选择、主要参数的选择等;3各种强度计算和校核(如有未知条件可按通用机械方式自行设定);4总电路电气原理的理解5 设计和制图表达。
三、进度安排序号各阶段完成的内容完成时间1知识准备1~2周2总体技术方案设计及计算3~4周3总装配图绘制5~7周4拆化零件图,详细设计8~11周5纂写设计计算说明书,准备答辩12周四、应收集的资料及主要参考文献[1] 机械设计手册编委会主编,机械设计手册·起重运输机械零部件、操作件和小五金.北京:机械工业出版社,2007,3[2] 严大考、郑兰霞主编,起重机械.郑州:郑州大学出版社,2003,9[3] 余维张主编,起重机械检修手册.北京:中国电力出版社,1998,11[4] 杨长睽,傅东明主编,起重机械(第2版).北京:机械工业出版社,1992,5[5] 机械设计手册编委会主编,机械设计手册.北京:机械工业出版社2007,2湘潭大学兴湘学院毕业论文(设计)评阅表学号2006183918 姓名谢伟专业机械设计制造及其自动化毕业论文(设计)题目: 18t桥式起重机的设计评价项目评价内容选题1.是否符合培养目标,体现学科、专业特点和教学计划的基本要求,达到综合训练的目的;2.难度、份量是否适当;3.是否与生产、科研、社会等实际相结合。
基于PLC的桥式起重机电气控制系统设计

整 机工 作 级 别 起升速度( m/ mi n ) 大车运行速度( m/ mi n ) 小车运行速度( m/ ai r n )
A5 1 3 . 3 6 5 . 9 7 3 O . 8 1
变 幅机构 与升 降机 构相 同的是 均采用 伺 服电机 与 变 频器 的配合 形成 闭环 控制 , 并安 装有 限位开关 , 防止 电机 的超速 和过 热运行 。与 升降 机构不 同 的是 变 幅机 构 通常 只装有 1台用于 反馈抱 闸信 号 的制动器 。 旋 转机构 由电机控 制 , 进行 3 6 0 。 旋 转 作 业 。旋 转 机 构通 常采用 脚踏 式 的液压 制动器 和手 轮式 的锁 紧装
第 2期 ( 总第 2 0 1 期)
2 0 1 7年 4月
机 械 工 程 与 自 动 化 ME CH ANI CAL E NGI NE ERI NG & AUTOM AT1 0N
No. 2
A pr .
文章编号 : 1 6 7 2 — 6 4 1 3 ( 2 0 1 7 ) 0 2 - 0 1 6 4 — 0 2
表 ห้องสมุดไป่ตู้ 3 2 t / 2 2 . 5 i T I 通 用 桥 式 起 重 机 的 主 要 设 计 参 数
起重量( t ) 跨度 ( I T I ) 起 升高 度 ( m) 3 2 2 2 . 5 9
桥 式起 重机作 为物 料 搬运 、 装 卸 或用 于 安 装 的 机 械设备 , 可 以减 轻或 代替人 们 的体力 劳动 , 提高 劳动 生 产率, 因 而 被 广 泛 地 应 用 于 国 民经 济 的 各 个 领 域 之 中[ 。 近年来 , 随着实 际作业 复 杂程度 的加 大 , 对 桥式 起 重机 的 电气控 制难 度也越 来越 大 , 而 P L C被 广 泛地 应 用其 中 , 并 起到 了 良好 的控 制 效果 。李 秀忠 用 P L C改 造 了门座 式起 重机 的继 电器 控 制 电路 , 提 高 了设 备 利 用率 ] 。朱学 军利 用 P L C的 通 讯 功 能进 行 电气 并 车 控制 , 为 并 车 吊 运 精 度 及 安 全 可 靠 性 研 究 提 供 了 借 鉴口 ] 。本 文将基 于 P L C控 制 技术 研 发 一 套 适 用 于 桥 式起 重机 的 电气控 制方 法 。 1 桥式起 重 机控 制 系统总体 设计 桥式 起重 机 的机 械 系 统 依 据 实 际作 业 需 要 而 设 计, 且具体 结 构复杂 , 自重较 大 , 从 而 对 机 械 系统 的调 整 难度极 大 。因此 , 对桥 式起 重机 的控 制 , 通 常侧 重于 电气系 统 , 利 用硬 件 的正确选 型 和软件 的合 理编 程 , 实 现 对起重 机 的有序 、 安 全控制 。 本文以 3 2 t / 2 2 . 5 1 T I 通 用桥 式起 重机 的相 关参 数 和 工作 流程 为依据 , 详 细介 绍 具 体 的控 制 系统 。3 2 t / 2 2 . 5 m 通用桥 式起 重机 的 主要设计 参数 如表 1 所示 。
塔式起重机电气控制系统毕业设计

塔式起重机电气控制系统毕业设计塔式起重机电气控制系统是一种用于控制塔式起重机的重要技术装备,其稳定性和精确性直接关系到工程安全和效率。
因此,对于该系统的设计和研究具有重要意义。
本文将从塔式起重机电气控制系统的原理、设计要点和方案优化等方面进行探讨,以期为相关专业的毕业设计提供参考。
首先,塔式起重机电气控制系统的原理是通过电气装置对起重机的运动进行控制,包括起升、行驶和回转等。
具体来说,该系统主要由电动机、控制器、传感器和执行器等组成。
电动机作为驱动设备,通过控制器接收指令信号,控制起重机的运动方向和速度。
传感器用于感测吊钩的位置和负荷情况,以及起重机的倾斜角度。
执行器则负责执行指令,实现起重机的运动控制。
通过这些组件的协同作用,塔式起重机能够实现准确、安全的工作状态。
在塔式起重机电气控制系统的设计中,需要关注以下几个主要问题。
首先是系统的稳定性。
通过合理配置电机和控制器的参数,可以保证系统在工作过程中的稳定性,并防止起重机因电力不稳定而出现异常情况。
其次是系统的安全性。
通过设置各种安全装置,如过载保护和风碰货等装置,可以确保起重机在工作过程中的安全。
另外,还需要考虑系统的可靠性和成本控制等方面。
针对塔式起重机电气控制系统的设计要点,可以考虑以下方面。
首先是控制系统的选型。
需要根据起重机的工况和电气系统的需求来选择合适的控制器和传感器。
其次是电气系统的布置。
需要合理布置电机、控制器和传感器的位置,减小电气设备之间的线缆距离,降低线路损耗,提高系统的效率。
此外,还需要考虑电气系统与机械结构的配合,确保系统的可靠性和稳定性。
为了优化塔式起重机电气控制系统的方案,可以从以下几个方面来考虑。
首先是提高系统的控制精度。
通过采用更精确的传感器和执行器,以及优化控制算法,可以提高起重机的运动控制精度。
其次是提高系统的可操作性。
通过人机界面的优化和功能的拓展,使操作员能够更方便地掌控起重机的运动状态和工作情况。
另外,还可以考虑引入智能化技术,如远程监控和故障诊断等,提高系统的自动化程度和故障处理能力。
门式起重机电气系统设计
任务书一、选题目的的理论价值和现实意义该题目涉及机电一体化,满足教学要求。
题目来源于生产,综合性、实践性强,通过集装箱龙门起重机设计(电气控制部分)可以培养学生正确的设计思想、方法、创新能力及科学态度,还可以提高学生的综合专业技能及素质。
二、本课题在国内外的研究状况及发展趋势轨道式龙门起重机采用电力驱动,由于其承载能力大、结构简单、营运费用低,在国内外得到广泛的使用。
通用型龙门起重机主要用于铁路、码头,大型工厂货场进行件杂货的装卸作业。
自1955年,集装箱运输方式出现后,由于采用集装箱运输可以节省包装费用,保持货物完整,且便于使用机械装卸搬运,减轻工人装卸作业劳动强度,提高装卸效率,加速运输船舶和车辆周转,降低运输费用,从而使集装箱运输得到迅速发展。
这种物流模式的变化又对装卸工艺、装卸机械提出了新的要求。
为了适应这种持续发展的要求,各大港口、起重机制造厂纷纷推出新的工艺方案和码头前沿作业机械和货场作业机械。
如JMQ3543、JMQ0733、JMQ4025集装箱龙门起重机采用现代化设计方法、并充分考虑了设备的可维修性和操作的舒适性及频繁的掏箱、对箱作业工况。
由于集装箱运输的发展,它的装卸必须用到起重机,因此轨道式龙门起重机的发展前景广阔,必将得到广泛的应用。
三、研究重点设计研究的主要内容包括:设计的起重机为重庆寸滩港的轨道式集装箱门式起重机,该起重机采用双主梁,跨距40.5t-40m,两端有效悬臂10m,可进行20'到40'国际标准集装箱的装卸、转运及堆放等作业。
进行集装箱门式起重机电气控制部分的设计和起重机的机器房结构设计。
电气控制部分采用三菱公司可编程控制器(PLC)控制,需画出电气原理图和电气布置图,并编写PLC梯形图程序,说明工作原理。
主要设计选择电动机、变频器和PLC程序设计;设计起重机的机器房结构,并使用Pro/ENGINEER或SolidWorks构建实体模型。
编写总设计说明书。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
起重機的電氣控制系統
起重機鋼結構負責載荷支承;起重機機構負責動作運轉;起重機機構動作的起動、運轉、換向和停止等均由電氣或液壓控制系統來完成,為了起重機運轉動作能平穩、準確、安全可靠是離不開電氣有效的傳動、控制與保護。
1.起重機電氣傳動
起重機對電氣傳動的要求有:調速、平穩或快速起制動、糾偏、保持同步、機構間的動作協
調、吊重止擺等。
其中調速常作為重要要求。
一般起重機的調速性能是較差的,當需要準確停車時,司機只能採取“點車”的操縱方法,如果“點車”次數很多,不但增加了司機的勞動強度,而且由於電器接電次數和電動機起動次數增加,而使電器、電動機工作年限大為縮短,事故增多,維修量增大。
有的起重機對準確停車要求較高,必須實行調速才能滿足停准要求。
有的起重機要採用
程式控制、數控、遙控等,這些技術的應用,往往必須在實現了調速要求後,才有可能。
由於起重機調速絕大多數需在運行過程中進行,而且變化次數較多,故機械變速一般不太
合適,大多數需採用電氣調速。
電氣調速分為二大類:直流調速和交流調速。
直流調速有以下三種方案:固定電壓供電的直流串激電動機,改變外串電阻和接法的直流調速;可控電壓供電的直流發電機———電動機的直流調速;可控電壓供電的晶閘管供電———直流電動機系統的直流調速。
直流調速具有超載能力大、調速比大、起制動性能好、適合頻繁的起制動、事故率低等優點。
缺點是系統結構複雜、價格昂貴、需要直流電源等。
交流調速分為三大類:變頻、變極、變轉差率。
調頻調速技術目前已大量地應用到起重機的無級調速作業當中,電子變壓變頻調速系統
的主體———變頻器已有系列產品供貨。
變極調速目前主要應用在葫蘆式起重機的鼠籠型雙繞組變極電動機上,採用
改變電機極
對數來實現調速。
變轉差率調速方式較多,如改變繞線非同步電動機外串電阻法、轉子晶閘管脈衝調速法等。
除了上述調速以外還有雙電機調速、液力推動器調速、動力制動調速、轉子脈衝調速、蝸流
制動器調速、定子調壓調速等等。
2.起重機的自動控制
可編程序控制器———程式控制裝置一般由電子數字控制系統組成,其程式自動控制功能主要由可編程序控制器來實現。
自動定位裝置———起重機的自動定位一般是根據被控對象的使用環境、精度要求來確定裝置的結構形式。
自動定位裝置通常使用各種檢測元件與繼電接觸器或可編程序控制器,相互配合達到自動定位的目的。
大車運行機構的糾偏和電氣同步———糾偏分為人為糾偏和自動糾偏。
人為糾偏是當偏斜超過一定值後,偏斜信號發生器發出信號,司機斷開超前支腿側的電機,接通滯後支腿側的電機進行調整。
自動糾偏是當偏斜超過一定值時,糾偏指令發生器發出指令,系統進行自動糾偏。
電氣同步是在交流傳動中,常採用帶有均衡電機的電軸系統,實現電氣同步。
地面操縱、有線與無線遙控———地面操縱多為葫蘆式起重機採用,其關鍵部件是手動按鈕
開關,即通常所稱的手電筒門。
有線遙控是通過專用的電纜或動力線作為載波體,對信號用調製解調傳輸方式,達到只用少通道即可實現控制的方法。
無線遙控是利用當代電子技術,將資訊以電波或光波為通道形式傳輸達到控制的目的。
起重電磁鐵及其控制———起重電磁鐵的電路,主要是提供電磁鐵的直流電源及完成控制(吸料、放料)要求。
其工作方式分為:定電壓控制方式和可調電壓控制方式。
3.起重機的電源引入裝置
起重機的電源引入裝置分為三類:硬滑線供電、軟電纜供電和滑環集電器。
硬滑線電源引入裝置有裸角鋼平面集電器、圓鋼(或銅)滑輪集電器和內藏式滑觸線集電
器進行電源引入。
軟電纜供電的電源引入裝置是採用帶有絕緣護套的多芯軟電線製成的,軟電纜有圓電纜
和扁電纜二種形式,它們通過吊掛的供電跑車進行引入電源。
4.起重機的電氣設備與電氣回路
不同類型的起重機的電氣設備是多種多樣的,其電氣回也不一樣,但電氣回路基本上還是由主回路、控制回路、保護回路等組成。
在這裏不必一一介紹,只簡要地介紹一下電動起重機的典型產品通用橋式起重機的主要電氣設備和基本
電氣回路。
1).通用橋式起重機的電氣設備
通用橋式起重機的電氣設備主要有各機構用的電動機、制動電磁鐵、控制電器和保護電
器。
電動機橋式起重機各機構應採用起重專用電動機,它要求具有較高的機械強度和較
大的超載能力。
應用最廣泛的是繞線式非同步電動機,這種電動機採用轉子外接電阻逐級起動
運轉,既能限制起動電流確保起動平穩,又可提供足夠的起動力矩,並能適應頻繁起動、反轉、制動、停止等工作的需要。
要求較高容量大的場合可採用直流電動機,小起重量起重機,運行機構中有時採用鼠籠式電動機。
繞線式電動機型號為JZR;JZR2和JZRH和YZR系列電動機。
鼠籠式電動機型號為JZ;JZ2和YZ系列電動機。
制動電磁鐵制動電磁鐵是各機構常閉式制動器的打開裝置。
起重機常用的打開裝置
有如下四種:單相電磁鐵(MZD1系列)、三相電磁鐵(MZS1系列)、液壓推動器(TY1系列)和液壓電磁鐵(MY1系列)。
操作電器又稱為控制電器,它包括控制器、接觸器、控制屏和電阻器等。
主令控制器主要用於大容量電動機或工作繁重、頻繁起動的場合(如抓鬥操作)。
它通常與控制屏中相應的接觸器動作,實現主電動機的正、反轉、制動停止與調速工作。
其常用型號為LK4系列和LKI4系列。
凸輪控制器主要用於小起重量起重機的各機構的控制中,直接控制電動機的正、反轉和停止。
要求控制器具有足夠的容量和開閉能力、熄弧性能好、觸頭接觸良好、操作應靈活、輕便、檔位清楚、零位手感明確、工作可靠、便於安裝、檢修和維護。
常用型號為KT10和KT12系列。
電阻器在起重機各機構中用於限制起動電流,實現平穩和調速之用。
要求應有足夠的導
電能力,各部分連接必須可靠。
保護電器橋式起重機的保護電器有保護櫃、控制屏、過電流繼電器、各機構的行程限
位、緊急開關、各種安全聯鎖開關及熔斷器等。
對於保護電器要求保證動作靈敏、工作安全可靠、確保起重機安全運轉。
2).電氣回路
橋式起重機電氣回路主要有主回路、控制回路及照明信號回路等。
(1)主回路直接驅使各機構電動機運轉的那部分回路稱為主回路,如圖2-18所示。
它
是由起重機主滑觸線開始,經保護櫃刀開關1QS保護櫃接觸器主觸頭,再經過各機構控制器
定子觸頭至各相應電動機,即由電動機外接定子回路和外接轉子回路組成。
(2)控制回路橋式起重機的控制回路又稱為聯鎖保護回路,它控制起重機總電源的接通
與分斷,從而實現對起重機的各種安全保護。
由控制回路控制起重機總電源的通斷,原理如圖2-19所示。
左邊部分為起重機的主回路,即直接為各機構電動機供電並使其運轉的那部分
電路。
右邊部分則為起重機的控制回路。
從圖2-19中可知,在主回路刀開關1DK 推合後,
控制回路於A;B處獲得接電,而主回路因接觸器KM主觸頭分斷未能接電,故整個起重機各
機構電動機均未接通電源而無法工作。
因此,起重機總電源的接通與分斷,就取決於主接觸器主觸頭KM的接通與否,而控制回路就是控制主接觸器KM主觸頭的接通與分斷,也就是控制起重機總電源的接通與分斷,故把這部分控制主回路。