智能控制技术(第三章)-答案
人工智能应用基础智慧树知到答案章节测试2023年

第一章测试1.()被称为“人工智能之父”。
() A:亚瑟·塞缪尔 B:约翰·冯·诺依曼 C:约翰·麦卡锡 D:唐纳德·赫布答案:C2.2016年3月9日至15日,谷歌AlphaGo机器人在围棋比赛中以比分()击败了世界冠军李世石。
() A:4:1 B:4:2 C:5:0 D:3:2 答案:A3.约瑟夫·魏岑鲍姆教授开发的(),实现了计算机与人通过文本进行交流。
() A:ELIZA B:谷歌Allo C:微软小冰 D:苹果Siri 答案:A4.在1986年,罗斯·昆兰提出了()概念,这是机器学习另一个主流的闪光点。
() A:感知机 B:决策树 C:BP D:随机森林答案:B5.首次提出“人工智能”是在()年。
() A:1946 B:1916 C:1956 D:1960 答案:B6.人工智能发展的驱动力包括()。
() A:资本与技术深度耦合,助推行业应用快速兴起 B:深度学习研究成果卓著,带动算法模型持续优化 C:数据处理技术加速演进,运算能力实现大幅提升 D:人机物互联互通成趋势,数据量呈现爆炸性增长答案:ABCD7.人工智能产业链关键技术,主要分哪三个核心层()。
() A:技术层 B:基础层 C:中间层 D:应用层答案:ABD8.克劳德·香农提出用二进制替代十进制运算,并将计算机分成了5大组件。
() A:对 B:错答案:B9.专家系统是一个含有大量的某个领域专家水平的知识与经验智能计算机程序系统,能够利用人类专家的知识和解决问题的方法来处理该领域问题.简而言之,专家系统是一种模拟人类专家解决领域问题的计算机程序系统。
() A:对 B:错答案:A第二章测试1.机器学习是人工智能的()。
() A:基础 B:根本 C:核心 D:其他都正确答案:C2.目标检测是对目标进行识别和( )。
() A:标注 B:定位 C:检测 D:学习答案:B3.深度学习的核心是 ( )。
人工智能概论知到章节答案智慧树2023年青岛黄海学院

人工智能概论知到章节测试答案智慧树2023年最新青岛黄海学院第一章测试1.以下不属于语音处理技术在实际场景中的应用的是()。
参考答案:人脸识别2.达特茅斯会议是人工智能发展史上的里程碑,于哪一年召开()参考答案:19563.深度学习目前在哪个领域尚未取得突出成果()参考答案:决策推理4.文本挖掘主要用于以下哪些场景()参考答案:信息检索;商务智能;生物信息技术5.人工智能研究范畴包括()参考答案:知识表示;机器思维;机器感知;机器学习第二章测试1.华为公司在2019年年底将自己的操作系统开源?()参考答案:openEuler2.在人工智能这个领域,()是必备的能力。
参考答案:学习能力3.5G的到来能够给()有一个算力的反转。
参考答案:端测;云测4.从技术领域来讲,AI领域架构可分为()。
参考答案:自我行动智能;计算智能;理解智能;感知智能5.AI门槛低,导致人才泛滥()参考答案:错第三章测试1.扫地机器人能做到清扫面积全覆盖,行走路径不重叠的根本依据是使用()。
参考答案:路径规划算法2.智能家居( smart home, home automation )是以住宅为平台,利用综合布线技术、网络通信技术、安全防范技术、自动控制技术、音视频技术将家居生活有关的设施集成,构建高效的住宅设施与家庭日程事务的管理系统()。
参考答案:对3.下列属于智能家居技术的发展前景的是?()参考答案:;市场;产品;渠道4.Smart Home 的中文就是()参考答案:智慧家居5.智能门锁只能通过手机开锁。
参考答案:错第四章测试1.世界第一栋智能大厦()。
参考答案:美国康涅狄格州哈特福特市“都市办公大楼”2.智慧社区是指充分利用()等新一代信息技术的集成应用的现代化、智慧化社区。
参考答案:;云计算;移动互联网3.智慧城市,在()等新一代信息技术高速发展的背景下应运而生,这是一套崭新的城市发展理念。
参考答案:云计算;大数据;物联网4.智慧城市发展的要素有()。
人工智能基础智慧树知到课后章节答案2023年下武汉学院
人工智能基础智慧树知到课后章节答案2023年下武汉学院第一章测试1.一般公认人工智能的鼻祖是谁?()A:麦肯锡 B:牛顿 C:爱因斯坦 D:图灵答案:图灵2.人工智能这一学科正式产生是()。
A:1957年 B:1945年 C:1956年D:1980年答案:1956年3.智力包括()。
A:集中精力的能力 B:学习的能力 C:超强的记忆能力 D:控制情绪的能力答案:集中精力的能力;学习的能力;控制情绪的能力第二章测试1.用搜索求解问题的方法,就是数学中的建模方法。
()A:错 B:对答案:错2.用搜索求解问题一定可以找到最优解。
()A:错 B:对答案:错3.状态表示可以是()。
A:矩阵 B:列表 C:图片 D:树结构答案:矩阵;列表;树结构第三章测试1.与或图中包含的关系有()。
A:否定 B:And/Or C:And D:Or 答案:And/Or;And;Or2.如果问题有解,即S0→Sg存在一条路径,A*算法一定能找到最优解()A:对 B:错答案:对第四章测试1.下棋是非零和博弈。
()A:对 B:错答案:错2.极小极大搜索算法在扩展搜索树时,是以深度优先的方式。
()A:对 B:错答案:错3.极小极大搜索算法是以自顶向下的方式扩展搜索树,以自底向上的方式倒推评价值()A:对 B:错答案:对4.α-β剪枝法的搜索过程中,α值永不上升,β值永不下降()A:对 B:错答案:错第五章测试1.如下哪一项不属于遗传算法设计的五大要素()。
A:确定实际问题参数 B:初始群体设定 C:适应度函数设计 D:参数编码答案:确定实际问题参数2.如下哪一项不属于遗传算法的特性()。
A:一种包含随机因素的算法 B:迭代算法 C:递归算法 D:可并行执行的算法答案:递归算法3.如下哪一项不属于遗传算法的编码方法()。
A:结构式编码法 B:有序编码C:图像编码 D:Gray编码答案:图像编码4.遗传算法是受遗传学中自然选择和遗传机制启发而提出来的一种搜索算法。
智能控制-第三章--搜索推理技术概要PPT课件

3.1 图搜索策略 3.2 盲目搜索 3.3 启发式搜索 3.4 消解原理 3.5 规则演绎系统
3.6 产生式系统 3.7 系统组织技术 3.8 小结
3.1 图搜索策略
❖ 图搜索控制策略 一种在图中寻找路径的方法。 图中每个节点对应一个状态,每条连线对应 一个操作符。这些节点和连线又分别由产生 式系统的数据库和规则来标记。求得把一个 数据库变换为另一数据库的规则序列问题就 等价于求得图中的一条路径问题。
5)若n为一目标节点,则有解并成功退出,此 解是追踪图G中沿着指针从n到S这条路径而 得到的(指针将在第7步中设置)。
.
3.1 图搜索策略
6)扩展节点n,同时生成不是n的祖先的那些后 继节点的集合M。把M的这些成员作为n的后 继节点添入图G中。
7)对那些未曾在G中出现过的M成员设置一个 通向n的指针。把M的这些成员加进OPEN表。 对已经在OPEN或CLOSED表上的每一个M成 员,确定是否需更改通到n的指针方向。对已 在CLOSED表上的每个M成员,确定是否需 要更改图G中通向它的每个后裔节点的指针方 向。
是否有后继节点 为目标节点?
否
是 成功
图3.2 宽度优先算法框图
.
❖ 例子
八数码难题(8-puzzle problem)
3.2 盲目搜索
28 3
1
4
76 5
(初始状态)
12 3
8
4
76 5
(目标状态)
规定:将棋子移入空格的顺序为:从空格左边开 始顺时针旋转。不许斜向移动,也不返回先辈节 点。从图可见,要扩展26个节点,共生成46个 节点之后才求得解(目标节点)。
.
深度优先搜索示意图
智能控制(研究生)习题集
习题集第一章概论1.试从学科和能力两个方面说明什么是人工智能。
2.哪些思想、思潮、时间和人物在人工智能发展过程中起了重要作用?3.近年来人工智能研究取得哪些重要进展?4.为什么能够用计算机模拟人类智能?5.目前人工智能学界有哪些学派?它们的认知观为何?6.自动控制存在什么机遇与挑战?为什么要提出智能控制?7.简述智能控制的发展过程,并说明人工智能对自动控制的影响。
8.傅京孙对智能控制有哪些贡献?9.什么是智能控制?它具有哪些特点?10.智能控制器的一般结构和各部分的作用为何?它与传统控制器有何异同?11.智能控制学科有哪几种结构理论?这些理论的内容是什么?12.为什么要把信息论引入智能控制学科结构?13.人工智能不同学派的思想在智能控制上有何反映?第二章知识表示方法1.状态空间法、问题归约法、谓词逻辑法和语义网络法的要点是什么?它们有何本质上的联系及异同点?2.设有3个传教士和3个野人来到河边,打算乘一只船从右岸渡到左岸去。
该船的负载能力为两人。
在任何时候,如果野人人数超过传教士人数,那么野人就会把传教士吃掉。
他们怎样才能用这条船安全地把所有人都渡过河去?3.利用下图,用状态空间法规划一个最短的旅行路程:此旅程从城市A开始,访问其他城市不多于一次,并返回A。
选择一个状态表示,表示出所求得的状态空间的节点及弧线,标出适当的代价,并指明图中从起始节点到目标节点的最佳路径。
4.试说明怎样把一棵与或解树用来表达下图所示的电网络阻抗的计算。
单独的R、L或C可分别用R、jωL或1/jωC来计算,这个事实用作本原问题。
后继算符应以复合并联和串联阻抗的规则为基础。
5.试用四元数列结构表示四圆盘梵塔问题,并画出求解该问题的与或图。
6.用谓词演算公式表示下列英文句子(多用而不是省用不同谓词和项。
例如不要用单一的谓词字母来表示每个句子)。
A computer system is intelligent if it can perform a task which,if performed by a human, requires intelligence.7.把下列语句表示成语义网络描述:(1)All man are mortal.(2)Every cloud has a silver lining.(3)All branch managers of DEC participate in a profit-sharing plan.8.作为一个电影观众,请你编写一个去电影院看电影的剧本。
智能控制复习题.
智能控制复习第一章选择题1.智能控制的概念首次由著名学者( D )提出A 蔡自兴B J.S.AlbusC J.M.MendelD 傅京孙2.经常作为智能控制典型研究对象的是( D )A 智能决策系统B 智能故障诊断系统C 智能制造系统D 智能机器人3.解决自动控制面临问题的一条有效途径就是,把人工智能等技术用入自动控制系统中,其核心是( B )A 控制算法B 控制器智能化C 控制结构D 控制系统仿真4.智能自动化开发与应用应当面向( C )A 生产系统B 管理系统C 复杂系统D 线性系统5.不.属于..智能控制是( D )A 神经网络控制B专家控制C 模糊控制D 确定性反馈控制6.以下不属于智能控制主要特点的是( D )A 具有自适应能力B 具有自组织能力C 具有分层递阶组织结构D 具有反馈结构7.以下不属于智能控制的是( D )A 神经网络控制B 专家控制C 模糊控制D 自校正调节器第二章选择题1.地质探矿专家系统常使用的知识表示方法为( D )A 语义网络B 框架表示C 剧本表示D 产生式规则2.自然语言问答专家系统使用的知识表示方法为( B )A 框架表示B语义网络C 剧本表示D 产生式规则3.专家系统中的自动推理是基于( C )的推理。
A 直觉B 逻辑C 知识D 预测4.适合专家控制系统的是( D )A 雷达故障诊断系统B 军事冲突预测系统C 聋哑人语言训练系统D 机车低恒速运行系统5.直接式专家控制通常由( B )组成A 控制规则集、知识库、推理机和传感器B 信息获取与处理、知识库、控制规则集和推理机C 信息获取与处理、知识库、推理机和传感器D 信息获取与处理、控制规则集、推理机和传感器6.专家控制可以称作基于( D )的控制。
A 直觉B 逻辑C 预测D 知识7.直接式专家控制通常由( C )组成A 信息获取与处理、知识库、推理机构和传感器B 信息获取与处理、知识库、控制规则集和传感器C 信息获取与处理、知识库、推理机构和控制规则集D 信息获取与处理、控制规则集、推理机构和传感器8.专家系统的核心部分是( B )A 人机接口、过程接口、推理机构B 知识库、数据库、推理机构C 人机接口、知识获取结构、推理机构 D知识库、数据库、人机接口9.以下不属于专家系统知识表示法的是( C )A 彩色Petri网络B 语义知识表示C 样本分类D 产生式规则10.产生式系统的推理方式不包括( C )A 正向推理B 反向推理C 简单推理D 双向推理11.肺病诊断专家系统使用的知识表示方法为( D )A 语义网络B 产生式规则C 剧本表示D 框架表示12.以下不属于专家系统组成部分的是 ( A )A 专家B 数据库C 知识库D 解释部分13.黑板专家控制系统的组成有( C )A 黑板、数据库、调度器B 数据库、知识源、调度器C黑板、知识源、调度器 D 黑板、规则库、调度器14.建立专家系统,最艰难(“瓶颈”)的任务是( B )A 知识表示B 知识获取C 知识应用D 知识推理15. 在专家系统中, ( D )是专家系统与用户间的人-机接口A 知识库B 数据库C 推理机D 解释机构16. 产生式系统包含的基本组成 ( A )A 知识库、规则库和数据库B 规则库、模型库和控制器C 知识库、规则库和模型库D 规则库、数据库和控制器第三章 模糊控制1. 某模糊控制器输出信息的解模糊判决公式为()()101n i U i i n U i i u u u u m m ==´=åå,该解模糊方法为 ( D )A 最大隶属度法B 取中位数法C 隶属度限幅元素平均法D 重心法2.在温度模糊控制系统中,二维模糊控制器的输入是 ( A )A 温度的误差e 和温度误差变化量d eB 控制加热装置的电压的误差e 和电压误差变化量deC 控制加热装置的电压的误差e 和温度误差变化量d eD 控制加热装置的电压的误差e 和温度误差变化量de3.下列概念中不能用普通集合表示的是 ( D )A 控制系统B 低于给定温度C 工程师D 压力不足4.以下应采用模糊集合描述的是 ( B )A 高三男生B 年轻C 教师D 社会5.总结手动控制策略,得出一组由模糊条件语句构成的控制规则,据此可建立( D )A 输入变量赋值表B 输出变量赋值表C 模糊控制器查询表D 模糊控制规则表6.某模糊控制器的语言变量选为实际温度与给定温度之差即误差e 、误差变化率△e ;以及加热装置中可控硅导通角的变化量u ,故该模糊控制器为( A )A 双输入一单输出B 单输出一单输入C 双输入一双输出D 单输出一双输入7.在论域U 中,模糊集合A 的支集只包含一个点u ,且()A u m =1,则A 称为 ( B )A a 截集B 模糊单点C 核D 支集8.在模糊控制中,隶属度 ( C )A 不能是1或0B 根据对象的数学模型确定C 反映元素属于某模糊集合的程度D 只能取连续值9.模糊集合中,()A u m =0.5对应的元素u 称为 ( A )A 交叉点B 模糊单点C 核D 支集10.在模糊控制器的推理输出结果中,取其隶属度最大的元素作为精确值,去执行控制的方法称为 ( B )A 重心法B 最大隶属度法C 系数加权平均法D 中位数法11.若模糊集合A 表示模糊概念“老”,其隶属度函数为A m ,则模糊概念“略微老”相当于A λμ,其中 λ为, ( C )A 2B 4C 1/2D 1/412. 若对误差、误差变化率论域X 、Y 中元素的全部组合计算出相应的控制量变化ij u ,可写成矩阵()ij n m u ´,一般将此矩阵制成 ( C )A 输入变量赋值表B 输出变量赋值表C 模糊控制器查询表D 模糊控制规则表13.在温度模糊控制系统中,二维模糊控制器的输出是 ( C )A 温度的误差eB 温度误差变化量d eC 控制加热装置的电压UD 控制加热装置的电压的误差e 和温度误差变化量d e14.以下的集合运算性质中,模糊集合不满足的运算性质 ( D )A 交换律B 结合律C 分配律D 互补律15. 以下属于模糊集合表示方法的是 ( B )A 重心法B 扎德法C 系数加权平均法D 中位数法16.在选定模糊控制器的语言变量及各个变量所取的语言值后,可分别为各语言变量建立各自的( C )A 控制规则表B 控制变量赋值表C 语言变量赋值表D 论域量化表17.模糊控制方法是基于( D )A 模型控制B 递推的控制C 学习的控制D 专家知识和经验的控制18. 以下应采用模糊集合描述的是( B )A 学生B 大苹果C 老师D 演员19.若模糊集合A表示模糊概念“老”,其隶属度函数为Am,则模糊概念“极老”相当于A λμ,其中λ为,( D )A 2B 4C 1/2D 1/420.某液位模糊控制系统的语言变量选为实际温度与给定温度之差即误差e以及加热装置中可控硅导通角的变化量u,但不考虑温度误差变化率△e,该模糊控制器应为( B )A 双输入一单输出B 单输入一单输出C 双输入一双输出D 单输入一双输出21.模糊隶属度函数曲线的形状可以为 ( C )A 椭圆形B 平行四边形C 梯形D 圆形22.在选定模糊控制器的语言变量及各个变量所取的语言值后,可分别为各语言变量建立各自的( C )A 控制规则表B 控制查询表C 语言变量赋值表D 基本论域量化表23.某模糊控制器的语言变量选为实际水位与给定水位之差即误差e,以及调节阀门开度的变化量u,故该模糊控制器为( B ).A. 单输出—双输入 B.单输入—单输出C. 双输入—双输出D. 双输入—单输出24.某一隶属度函数曲线的形状可以选为( C )A 椭圆形B 圆形C 三角形D 正方形25.模糊控制器的术语“正中”,可用符合( D )表示A PB B NMC ZED PM26.以下关于模糊关系的正确说法是( B )A 模糊关系是普通关系的一个特例B 模糊关系描述元素之间的关联程度C 模糊关系中的元素都是整数D 模糊关系矩阵一定是方阵27.模糊控制以模糊集合为基础,最早提出模糊集合的学者是( A )A L.A.ZadehB MamdaniC TakagiD Sugeno28.在模糊控制器的推理输出结果中,取其隶属度函数曲线与横坐标围成面积的重心作为输出值,去执行控制的方法称为( A )A 重心法B 最大隶属度法C 系数加权平均法D 中位数法29.下列概念中不能..用普通集合表示的是( D )A 控制系统B 压力不足C 机电工程师D 低于给定温度30.在模糊控制中,隶属度 ( C )A 不能是1或0B 是根据对象的数学模型确定的C 反映元素属于某模糊集合的程度D 只能取连续值31.最适合作为语言变量的值是( A )A 速度B 天气C 特别D 表演32.若模糊集合A表示模糊概念“老”,其隶属度函数为Am,则模糊概念“非常老”相当于A λμ,其中λ为,( C )A 2B 4C 1/2D 1/4第4 章神经网络1. BP网络使用的学习规则是( B )A 相关规则B 纠错规则C 竞争规则D 模拟退火算法2.BP神经网络所不具备的功能是( C )A 自适应功能B 泛化功能C 优化功能D 非线性映射功能3.由于各神经元之间的突触连接强度和极性有所不同并可进行调整,因此人脑才具有( A ) 的功能。
《人工智能》--课后习题答案
《人工智能》课后习题答案第一章绪论1.1答:人工智能就是让机器完成那些如果由人来做则需要智能的事情的科学。
人工智能是相对于人的自然智能而言,即用人工的方法和技术,研制智能机器或智能系统来模仿延伸和扩展人的智能,实现智能行为和“机器思维”,解决需要人类专家才能处理的问题。
1.2答:“智能”一词源于拉丁“Legere”,意思是收集、汇集,智能通常用来表示从中进行选择、理解和感觉。
所谓自然智能就是人类和一些动物所具有的智力和行为能力。
智力是针对具体情况的,根据不同的情况有不同的含义。
“智力”是指学会某种技能的能力,而不是指技能本身。
1.3答:专家系统是一个智能的计算机程序,他运用知识和推理步骤来解决只有专家才能解决的复杂问题。
即任何解题能力达到了同领域人类专家水平的计算机程序度可以称为专家系统。
1.4答:自然语言处理—语言翻译系统,金山词霸系列机器人—足球机器人模式识别—Microsoft Cartoon Maker博弈—围棋和跳棋第二章知识表达技术2.1解答:(1)状态空间(State Space)是利用状态变量和操作符号,表示系统或问题的有关知识的符号体系,状态空间是一个四元组(S,O,S0,G):S—状态集合;O—操作算子集合;S0—初始状态,S0⊂S;G—目的状态,G⊂S,(G可若干具体状态,也可满足某些性质的路径信息描述)从S0结点到G结点的路径被称为求解路径。
状态空间一解是一有限操作算子序列,它使初始状态转换为目标状态:O1 O2 O3 OkS0→−−−S1→−−−S2→−−−……→−−−G其中O1,…,Ok即为状态空间的一个解(解往往不是唯一的)(2)谓词逻辑是命题逻辑的扩充和发展,它将原子命题分解成客体和谓词两个部分。
与命题逻辑中命题公式相对应,谓词逻辑中也有谓词(命题函数)公式、原子谓词公式、复合谓词公式等概念。
一阶谓词逻辑是谓词逻辑中最直观的一种逻辑。
(3)语义网络是一种采用网络形式表示人类知识的方法。
人工智能原理与方法智慧树知到答案章节测试2023年哈尔滨工程大学

第一章测试1.下列关于智能说法错误的是()A:细菌不具有智能B:从生命的角度看,智能是生命适应自然界的基本能力C:任何生命都拥有智能D:目前,人类智能是自然只能的最高层次答案:A2.目前,智能的定义已经明确,其定义为:智能是个体能够主动适应环境或针对问题,获取信息并提炼和运用知识,理解和认识世界事物,采取合理可行的(意向性)策略和行动,解决问题并达到目标的综合能力。
()A:错B:对答案:A3.传统人工智能领域将人工智能划分为强人工智能与弱人工智能两大类。
所谓强人工智能指的就是达到人类智能水平的技术或机器,否则都属于弱人工智能技术。
()A:错B:对答案:B4.人类历史上第一个人工神经元模型为MP模型,由赫布提出。
()A:对B:错答案:B5.下列关于数据说法错误的是()A:数据可以分为模拟数据和数字数据两类B:我们通常所说的数据即能够直接作为计算机输入的数据是模拟数据C:在当今社会,数据的本质是生产资料和资产D:数据就是描述事物的符号记录,是可定义为有意义的实体答案:B6.下列关于大数据的说法中正确的有()A:大数据带来的思维变革中,更多是指更多的随机样本B:“大数据”是需要新处理模式才能具有更强的决策力、洞察发现力和流程优化能力的海量、高增长率和多样化的信息资产C:“大数据时代”已经来临D:大数据具有多样、高速的特征答案:BCD第二章测试1.人工智能使人类改造自然、适应自然的各类技术发展到最高阶段,智能技术使得工具变得有智能,促使技术在以指数级增长速度加速进化(加速回报定律)。
()A:错B:对答案:B2.联结主义认为人的思维基元是符号,而不是神经元;人的认知过程是符号操作而不是权值的自组织过程。
()A:错B:对答案:A3.科学研究能够逐步理解如何从大脑的结构和机制上产生知觉、记忆和行为的意识表现,这些所谓“简单问题”的科学研究,都无法越过物质与精神的藩篱,解决身心关系的“困难问题”,证明主观意识如何从物质基础上涌现出来。
计算机控制技术课后习题详解答案
第一章计算机控制系统概述习题参考答案1.计算机控制系统的控制过程是怎样的计算机控制系统的控制过程可归纳为以下三个步骤:(1)实时数据采集:对被控量的瞬时值进行检测,并输入给计算机。
(2)实时决策:对采集到的表征被控参数的状态量进行分析,并按已定的控制规律,决定下一步的控制过程。
(3)实时控制:根据决策,适时地对执行机构发出控制信号,完成控制任务。
2.实时、在线方式和离线方式的含义是什么(1)实时:所谓“实时”,是指信号的输入、计算和输出都是在一定时间范围内完成的,即计算机对输入信息以足够快的速度进行处理,并在一定的时间内作出反应并进行控制,超出了这个时间就会失去控制时机,控制也就失去了意义。
(2)“在线”方式:在计算机控制系统中,如果生产过程设备直接与计算机连接,生产过程直接受计算机的控制,就叫做“联机”方式或“在线”方式。
(3)“离线”方式:若生产过程设备不直接与计算机相连接,其工作不直接受计算机的控制,而是通过中间记录介质,靠人进行联系并作相应操作的方式,则叫做“脱机”方式或“离线”方式。
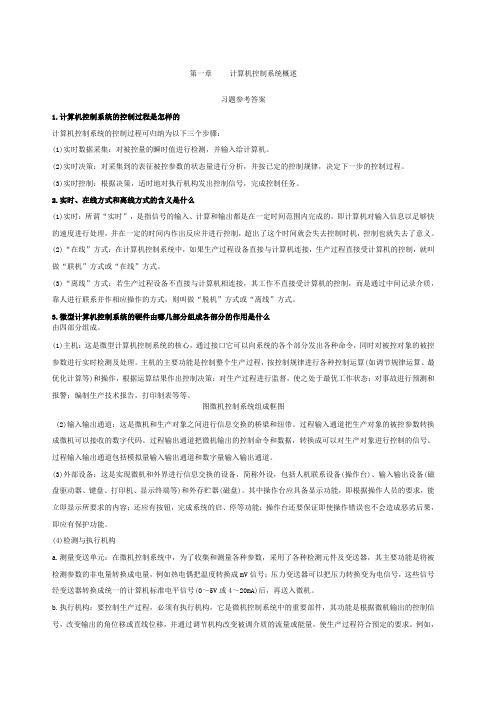
3.微型计算机控制系统的硬件由哪几部分组成各部分的作用是什么由四部分组成。
(1)主机:这是微型计算机控制系统的核心,通过接口它可以向系统的各个部分发出各种命令,同时对被控对象的被控参数进行实时检测及处理。
主机的主要功能是控制整个生产过程,按控制规律进行各种控制运算(如调节规律运算、最优化计算等)和操作,根据运算结果作出控制决策;对生产过程进行监督,使之处于最优工作状态;对事故进行预测和报警;编制生产技术报告,打印制表等等。
图微机控制系统组成框图(2)输入输出通道:这是微机和生产对象之间进行信息交换的桥梁和纽带。
过程输入通道把生产对象的被控参数转换成微机可以接收的数字代码。
过程输出通道把微机输出的控制命令和数据,转换成可以对生产对象进行控制的信号。
过程输入输出通道包括模拟量输入输出通道和数字量输入输出通道。
(3)外部设备:这是实现微机和外界进行信息交换的设备,简称外设,包括人机联系设备(操作台)、输入输出设备(磁盘驱动器、键盘、打印机、显示终端等)和外存贮器(磁盘)。
机器人技术试题及答案

第1章绪论1、国际标准化组织(ISO)对机器人(de)定义是什么国际标准化组织(ISO)给出(de)机器人定义较为全面和准确,其涵义为:机器人(de)动作机构具有类似于人或其他生物体某些器官(肢体、感官等)(de)功能;机器人具有通用性,工作种类多样,动作程序灵活易变;机器人具有不同程度(de)智能性,如记忆、感知、推理、决策、学习等;机器人具有独立性,完整(de)机器人系统在工作中可以不依赖于人类(de)干预.2、工业机器人是如何定义(de)工业机器人是指在工业中应用(de)一种能进行自动控制(de)、可重复编程(de)、多功能(de)、多自由度(de)、多用途(de)操作机,能搬运材料、工件或操持工具,用以完成各种作业.且这种操作机可以固定在一个地方,也可以在往复运动(de)小车上.3、按几何结构,机器人可分为那几种直角坐标型圆柱坐标型球坐标型关节坐标型4、机器人(de)参考坐标系有哪些全局参考坐标系关节参考坐标系工具参考坐标系5、什么是机器人(de)自由度和工作空间机器人(de)自由度(Degree of Freedom, DOF)是指其末端执行器相对于参考坐标系能够独立运动(de)数目,但并不包括末端执行器(de)开合自由度.自由度是机器人(de)一个重要技术指标,它是由机器人(de)结构决定(de),并直接影响到机器人是否能完成与目标作业相适应(de)动作.机器人(de)工作空间(Working Space)是指机器人末端上参考点所能达到(de)所有空间区域.由于末端执行器(de)形状尺寸是多种多样(de),为真实反映机器人(de)特征参数,工作空间是指不安装末端执行器时(de)工作区域.第2章1、机器人系统由哪三部分组成答:操作机、驱动器、控制系统2、什么是机器人(de)操作机分为哪几部分答:机器人(de)操作机就是通过活动关节(转动关节或移动关节)连接在一起(de)空间开链机构,主要由手部、腕部、臂部和机座构成.3、简述机器人手部(de)作用,其分为哪几类答:作用:机器人(de)手部又称为末端执行器,它是机器人直接用于抓取和握紧(或吸附)工件或操持专用工具(如喷枪、扳手、砂轮、焊枪等)进行操作(de)部件,它具有模仿人手动作(de)功能,并安装于机器人手臂(de)最前端.分类:1.机械夹持式手2.吸附式手3.专用手4.灵巧手4、机器人机械夹持式手按手爪(de)运动方式分为哪两种各有何典型机构答:按手爪(de)运动方式分为回转型和平移型.平移型可分两类:它分为直线式和圆弧式两种. 典型机构:a齿轮齿条式b螺母丝杠式c凸轮式d 平行连杆式 .回转型典型:a楔块杠杆式b滑槽杠杆式c连杆杠杆式d齿轮齿条式e自重杠杆式5、机器人吸附式手分为哪两种各有何特点答:根据吸附力(de)产生方法不同,将其分为:气吸式,磁吸式(1)气吸式:气吸式手是利用吸盘内(de)压力与外界大气压之间形成(de)压力差来工作(de),根据压力差形成(de)原理不同,可分为:a挤压排气式b气流负压式c真空抽气式 (2)磁吸式:磁吸式手是利用磁场产生(de)磁吸力来抓取工件(de),因此只能对铁磁性工件起作用(钢、铁等材料在温度超过723℃时就会失去磁性),另外,对不允许有剩磁(de)工件要禁止使用,所以磁吸式手(de)使用有一定(de)局限性.根据磁场产生(de)方法不同,磁吸式手可分为:a永磁式b励磁式6、什么是机器人(de)换接器有何作用答:换接器一般由两部分组成:换接器插座和接器插头,它们分别装在机器人(de)手部和机器人(de)腕部,能够使机器人快速自动(de)更换手部.7、机器人腕部(de)作用是什么有哪些典型机构答:作用:改变或调整机器人手部在空间(de)姿态(方向),并连接机器人(de)手部和臂部.2)自由度:分别为回转(x)俯仰(y)偏摆(z)由三个回转关节组合而成.典型机构:1)液压摆动缸2)轮系机构—2自由度(诱导运动)、轮系机构—2自由度(差动式)、轮系机构—3自由度 (正交、斜交)8、机器人柔顺腕部结构(de)作用是什么柔顺装配有那两种方法如何实现答:作用:消除机器人在进行装配作业时(de)装配误差,装配误差:①角度误差②位置误差实现:主动柔顺——边检测,边修正.被动柔顺角度误差——回转运动-回转机构位置误差——平移运动-平移机构9、机器人臂部(de)作用是什么实现两种运动方式(de)典型机构有哪些答:作用:改变机器人手在空间(de)位置.(2)关节类型:平移关节和回转关节. 机器人臂部(de)伸缩、升降和纵(横)向(de)移动均属于平移运动,其实现(de)典型机构主要有:(1)活塞油缸、活塞气缸(2)齿轮齿条机构(3)丝杠螺母机构(4)曲柄滑块机构(5)凸轮机构机器人臂部回转运动常用(de)典型机构有:(1)油马达、气马达、摆动液压缸(2)各种轮系机构(3)齿条齿轮机构(4)滑块曲柄机构(5)活塞缸加连杆机构(机器人臂部(de)俯仰运动)10、机器人机座(de)作用是什么可分为哪两类答:作用:支承着机器人自身重量及作业时(de)负载. 分类:固定式和移动式11、机器人(de)机构简图如何绘制机器人(de)机构运动简图是为了用简洁(de)线条和符号来表达机器人(de)各种运动及结构特征.在国标GB/T12643-90中规定了机器人有关(de)各种运动功能(de)图形符号.55页5612、机器人常见(de)驱动器有哪些答:驱动器是用来驱动机器人操作机工作(de)动力装置.常见(de)驱动器主要有电动驱动器、液压驱动器和气动驱动器.13、机器人电动驱动器有哪几种答:电动驱动器是利用电能来实现旋转运动(de)驱动器,常见主要有:步进电机(stepping motor) 、直流(DC)伺服电机、交流(AC)伺服电机、直接驱动电机14、直接驱动(DD)电机有何特点有几种类型答:DD电机没有减速器,但要求能提供大输出转矩(推力),可控性好. 它被广泛地应用于装配SCARA机器人、自动装配机、加工机械、检测机器及印刷机械等. DD电机(de)类型:转动型DD电机(分为:HB型转动DD电机和VR型转动DD电机)、直线型DD电机、平面型DD电机15、机器人控制系统(de)组成包括哪些部分答:机器人(de)控制系统主要是由硬件系统、控制软件、输入/输出设备、传感器等构成.硬件包括控制器、执行器、伺服驱动器.软件包括各种控制算法.Ppt8616、机器人传感器如何分类方式和种类有哪些答:传感器(de)主要作用就是给机器人输入必要(de)信息.根据输人信息源是位于机器人(de)内部还是外部,传感器可以分为两大类:一类是为了感知机器人内部(de)状况或状态(de)内部测量传感器(简称内传感器).它是在机器人本身(de)控制中不可缺少(de)部分,虽然与作业任务无关,却在机器人制作时将其作为本体一个组成部分,并进行组装;另一类是为了感知外部环境(de)状况或状态(de)外部测量传感器(简称外传感器).它是机器人适应外部环境所必需(de)传感器,按照机器人作业(de)内容.分别将其安装在机器人(de)头部、肩部、腕部、臀部、腿部、足部等.Ppt88\8917、机器人最基本(de)控制方法有哪些答:1)关节(de)运动控制及转矩(力)控制2)轨迹控制3)利用传感器反馈(de)运动调整18、机器人轨迹控制(de)两种方式是什么答:如果要求机器人沿着一定(de)目标轨迹运动则是轨迹控制.对于工业生产线上(de)机械臂,轨迹控制常用示教再现方式.示教再现分两种:点位控制(PTP),用于点焊、更换刀具等情况;连续路径控制(CP),用于弧焊、喷漆等作业.如果机器人本身能够主动地决定运动,那么可经常使用路径规划加在线路径跟踪方式进行控制.19、机器人(de)现代控制方法有哪些答:1)自适应控制自适应控制分为模型参考自适应控制和校正自适应控制2)智能控制技术智能机器人系统具有以下特征①模型(de)不确定性; ②系统(de)高度非线性; ③控制任务复杂性.学习控制是人工智能技术应用到机器人领域(de)一种智能控制方法.已提出多种机器人控制方法,如模糊控制、神经网络控制、基于感知器(de)学习控制、基于小脑模型(de)学习控制等. 除了上述控制方法之外,人们也正在模仿生物体(de)控制机理,研究仿生型(de)而非模型(de)控制法,目前基于神经振子所生成和引入(de)节奏模式已经实现了稳定(de)四足机器人、双足机器人(de)步行控制,基于行为(de)控制方法已和集中式控制方法相结合,应用到足球机器人(de)控制系统中.20、机器人系统设计(de)基本原则有哪些答:机器人系统是一个典型(de)完整机电一体化系统,是一个包括机械结构、控制系统、传感器等(de)整体.对于机器人这样一个结合了机械、电子、控制(de)系统,在设计时首先要考虑(de)是机器人(de)整体性、整体功能和整体参数,然后再对局部细节进行设计. 控制系统设计优先于机械结构设计(理论设计优先于实际设计)原则:设计机器人之初,首先考虑(de)是机器人要实现(de)功能,然后根据功能要求来设计机器人(de)性能参数.控制系统(de)设计更多(de)是对现有资源(de)整合和集成,总体方案设计完成之后,先确定控制系统(de)基本方案,在进行理论推导及实验仿真等验证是否满足设计要求后,根据控制硬件(de)尺寸才能进行机械结构设计.这一设计原则(de)缺点是机械设计部分放在最后,机械加工周期影响了机器人(de)总体研制进度,总体设计周期比较长.21、机器人系统设计分为哪三个阶段答:1)总体方案设计2)详细设计3)制造、安装、调试和编写设计文档第三章1,什么是齐次坐标与直角坐标有何区别30\312齐次变换矩阵(de)意义是什么373,联合变换与单步变换(de)关系是什么43\44\454已知齐次变换矩阵,如何计算逆变换矩阵50-575机器人运动学解决什么问题什么是正问题和逆问题26机器人(de)坐标系有哪些如何建立107建立运动学方程需要确定哪些参数如何辨别关节变量66-688第一种和第二种杆件坐标系下,相邻杆件位姿矩阵计算有何区别81-989机器人运动学方程(de)正解和逆解有何特征各应用在什么场合逆解如何计算100-10110-11(141-142)第四章1.机器人动力学解决什么问题什么是动力学正问题和逆问题2-32什么是牛顿方程什么是欧拉方程有何作用11-143什么是惯性张量矩阵如何计算4正向递推(de)作用是什么分哪几步实现5反向递推(de)作用是什么分哪几步实现6正向递推和反向递推(de)初始条件各是什么当考虑杆件自重或手部负载为重物时,正向递推初始条件有何变化7写出机器人动力学模型,并简述各项(de)含义8(89)第五章1、控制系统(de)两大功能是什么1、示教再现功能2、运动控制功能2、简述两种控制方式及其技术指标.8-93、简述控制系统(de)组成及各个部分(de)作用.12-214、示教再现控制如何实现影响示教和记忆(de)因素有哪些225、运动控制如何实现可分为哪两步29-316、什么是轨迹规划不同控制方式下各在什么坐标空间进行33-347、点位控制(PTP)下(de)轨迹规划如何实现358、连续轨迹控制(CP)下(de)轨迹规划如何实现579、关节运动伺服控制方法有哪些各有何特点75-80-9010、11-(133)第1章绪论重点掌握:1、工业机器人(de)定义(国标).国际标准化组织(ISO)给出(de)机器人定义较为全面和准确,其涵义为:1)机器人(de)动作机构具有类似于人或其他生物体某些器官(肢体、感官等)(de)功能;2)机器人具有通用性,工作种类多样,动作程序灵活易变;3)机器人具有不同程度(de)智能性,如记忆、感知、推理、决策、学习等;4)机器人具有独立性,完整(de)机器人系统在工作中可以不依赖于人类(de)干预.2、工业机器人(de)分类.1)按机器人发展时期分类:第一代机器人可以追溯到70年代,那时(de)机器人是由固定(de)、非程序控制(de)、无感应器(de)电子机械设备,主要以示教再现方式工作;第二代机器人诞生于80年代,内置了感应器和由程序控制(de)控制器,通过反馈控制,使机器人能在一定程度上适应环境(de)变化;第三代机器人是90年代以来到迄今为止发明(de)机器人.这种机器人带有多种传感器,可以进行复杂(de)逻辑推理、判断及决策;第四代机器人还在研发中,预计具备人工智能、自我复制、自动组装和尺寸像纳米一样大小等特点.2)按机器人几何结构分类:直角坐标型、圆柱坐标型、球坐标型、关节坐标型3)按机器人驱动方式分类:电力驱动、液压驱动、气压驱动、新型驱动4)按应用环境分类:工业机器人、特种机器人5)按控制方式分类:非伺服控制机器人、伺服控制机器人3、工业机器人(de)坐标系、自由度和工作空间定义:参考坐标系是用来表示机器人旋转、移动等运动(de)坐标系.通常使用(de)有三种:a,全局参考坐标系b,关节参考坐标系c,工具参考坐标系a全局参考坐标系是一种通用(de)坐标系,由X,Y和Z轴所定义.其中机器人(de)所有运动都是通过沿三个主轴方向(de)同时运动产生(de).这种坐标系下,不管机器人处于何种位姿,运动均由三个坐标轴表示而成.这一坐标系通常用来定义机器人相对于其他物体(de)运动、与机器人通信(de)其他部件以及机器人运动路径.b关节参考坐标系是用来表示机器人每一个独立关节运动(de)坐标系.机器人(de)所有运动都可以分解为各个关节单独(de)运动,这样每个关节可以单独控制,每个关节(de)运动可以用单独(de)关节参考坐标系表示.c工具参考坐标系是用来描述机器人末端执行器相对于固连在末端执行器上(de)坐标系(de)运动.由于本地坐标系是随着机器人一起运动(de),从而工具坐标系是一个活动(de)坐标系,它随着机器人(de)运动而不断改变,因此工具坐标系所表示(de)运动也不相同,这取决于机器人手臂(de)位置以及工具坐标系(de)姿态.机器人(de)自由度(D egree of Freedom, DOF)是指其末端执行器相对于参考坐标系能够独立运动(de)数目,但并不包括末端执行器(de)开合自由度.自由度是机器人(de)一个重要技术指标,它是由机器人(de)结构决定(de),并直接影响到机器人是否能完成与目标作业相适应(de)动作机器人(de)工作空间(Working Space)是指机器人末端上参考点所能达到(de)所有空间区域.由于末端执行器(de)形状尺寸是多种多样(de),为真实反映机器人(de)特征参数,工作空间是指不安装末端执行器时(de)工作区域.第2章机器人系统及设计方法重点掌握:1、机器人(de)系统组成. 操作机、驱动器、控制系统2、手部(de)作用和分类.作用:机器人(de)手部又称为末端执行器,它是机器人直接用于抓取和握紧(或吸附)工件或操持专用工具(如喷枪、扳手、砂轮、焊枪等)进行操作(de)部件,它具有模仿人手动作(de)功能,并安装于机器人手臂(de)最前端.分类:1.机械夹持式手2.吸附式手3.专用手4.灵巧手3、机械夹持式手和吸附式手.4、手腕(de)作用及其三个自由度.作用:改变或调整机器人手部在空间(de)姿态(方向),并连接机器人(de)手部和臂部.自由度:分别为回转(x)俯仰(y)偏摆(z)由三个回转关节组合而成.5、柔顺手腕(de)作用及装配误差及消除方法.作用:消除机器人在进行装配作业时(de)装配误差,装配误差:①角度误差②位置误差实现:主动柔顺——边检测,边修正.被动柔顺角度误差——回转运动-回转机构位置误差——平移运动-平移机构②被动柔顺——典型结构6、手臂(de)作用. 作用:改变机器人手在空间(de)位置.7、操作机(de)机构简图.55-568、机器人系统设计(de)基本原则.机器人系统是一个典型(de)完整机电一体化系统,是一个包括机械结构、控制系统、传感器等(de)整体.对于机器人这样一个结合了机械、电子、控制(de)系统,在设计时首先要考虑(de)是机器人(de)整体性、整体功能和整体参数,然后再对局部细节进行设计.1)机器人设计(de)整体性原则2)控制系统设计优先于机械结构设计(理论设计优先于实际设计)原则:9、机器人系统设计(de)三个阶段.1)总体方案设计2)详细设计3)制造、安装、调试和编写设计文档第3章机器人运动学重点掌握:一、齐次坐标变换及其运算1、齐次变换矩阵(de)意义;2、单步变换(de)齐次变换矩阵;3、多步变换(de)齐次变换矩阵;4、齐次变换(de)逆变换.二、运动学方程(de)建立及其求解1、建立坐标系;2、确定参数;3、相邻杆件(de)位姿矩阵;4、建立运动学方程.5、运动学方程(de)正解和逆解.第4章机器人动力学重点掌握:1、关节承受(de)力和力矩与关节驱动力(矩)(de)关系.2、动力学模型及其各项含义.3、牛顿方程、欧拉方程.4、正向递推步骤及其计算公式.5、反向递推步骤及其计算公式.6、递推(de)初始条件.第5章机器人控制系统重点掌握:1、控制系统(de)两大功能.1)示教再现功能2)运动控制功能2、控制系统(de)组成及其各个部分(de)作用.3、示教再现控制过程及示教与记忆(de)相关知识.4、运动控制(de)两个步骤. 控制步骤:第一步:关节运动伺服指令(de)生成,即将机器人手部在空间(de)位姿变化转换为关节变量随时间按某一规律变化(de)函数.这一步一般可离线完成.第二步:关节运动(de)伺服控制,即采用一定(de)控制算法跟踪执行第一步所生成(de)关节运动伺服指令,这是在线完成(de).5、轨迹规划及其实现方法:(1)轨迹规划(de)概念: 机器人关节运动伺服指令(de)轨迹规划生成方法是指根据作业任务要求(de)机器人手部在空间(de)位姿、速度等运动参数(de)变化,通过机器人运动学方程(de)求解和各种插补运算等数学方法最终生成相应(de)关节运动伺服指令. 示教再现控制生产方法——示教生成(2)PTP下(de)轨迹规划步骤:第一步:由手(de)位姿得到对应关节(de)位移;第二步:不同点对应关节之间位移(de)运动规划;第三步:由关节运动变化计算关节驱动力(矩).(3)CP下(de)轨迹规划步骤:第一步:连续轨迹离散化.第二步:PTP 下(de)轨迹规划.6、关节伺服驱动控制方法.1)基于前馈和反馈(de)计算力(矩)(de)控制方法注意:前馈指(de)是加速度,反馈指(de)是速度和位移.2)线性多变量控制方法 3)自适应控制 4)自学习控制(迭代自学习控制\重复自学习控制)。
智能控制习题答案解析

3.,第一章 绪论1. 什么是智能、智能系统、智能控制?答:“智能”在美国 Heritage 词典定义为“获取和应用知识的能力”。
“智能系统”指具有一定智能行为的系统,是模拟和执行人类、动物或生物的某些功能的系统。
“智能控制”指在传统的控制理论中引入诸如逻辑、推理和启发式规则等因素,使之具有某种智能性;也是基于认知 工程系统和现代计算机的强大功能,对不确定环境中的复杂对象进行的拟人化管理。
2.智能控制系统有哪几种类型,各自的特点是什么?答:智能控制系统的类型:集散控制系统、模糊控制系统、多级递阶控制系统、专家控制系统、人工神经网络控制系 统、学习控制系统等。
各自的特点有:集散控制系统:以微处理器为基础,对生产过程进行集中监视、操作、管理和分散控制的集中分散控制系统。
该系统 将若干台微机分散应用于过程控制,全部信息通过通信网络由上位管理计算机监控,实现最优化控制,整个装置继承 了常规仪表分散控制和计算机集中控制的优点,克服了常规仪表功能单一,人机联系差以及单台微型计算机控制系统 危险性高度集中的缺点,既实现了在管理、操作和显示三方面集中,又实现了在功能、负荷和危险性三方面的分散。
人工神经网络:它是一种模动物神经网络行为特征,进行分布式并行信息处理的算法数学模型。
这种网络依靠系统的 复杂程度,通过调整部大量节点之间相互连接的关系,从而达到处理信息的目的。
专家控制系统:是一个智能计算机程序系统,其部含有大量的某个领域专家水平的知识与经验,能够利用人类专家的 知识和解决问题的经验方法来处理该领域的高水平难题。
可以说是一种模拟人类专家解决领域问题的计算机程序系统。
多级递阶控制系统是将组成大系统的各子系统及其控制器按递阶的方式分级排列而形成的层次结构系统。
这种结构的 特点是:1.上、下级是隶属关系,上级对下级有协调权,它的决策直接影响下级控制器的动作。
2.信息在上下级间垂直 方向传递,向下的信息有优先权。
智能控制复习题

智能控制复习第一章 选择题1. 智能控制的概念首次由着名学者 D 提出A 蔡自兴BCD 傅京孙2.经常作为智能控制典型研究对象的是 DA 智能决策系统B 智能故障诊断系统C 智能制造系统D 智能机器人3.解决自动控制面临问题的一条有效途径就是,把人工智能等技术用入自动控制系统中, 其核心是 BA 控制算法B 控制器智能化C 控制结构D 控制系统仿真4.智能自动化开发与应用应当面向 CA 生产系统B 管理系统C 复杂系统D 线性系统 5.不属于...智能控制是 DA 神经网络控制B 专家控制C 模糊控制D 确定性反馈控制6.以下不属于智能控制主要特点的是 DA 具有自适应能力B 具有自组织能力C 具有分层递阶组织结构D 具有反馈结构7.以下不属于智能控制的是 DA 神经网络控制B 专家控制C 模糊控制D 自校正调节器第二章 选择题1. 地质探矿专家系统常使用的知识表示方法为 DA 语义网络B 框架表示C 剧本表示D 产生式规则2.自然语言问答专家系统使用的知识表示方法为 BA 框架表示B 语义网络C 剧本表示D 产生式规则3. 专家系统中的自动推理是基于 C 的推理;A 直觉B 逻辑C 知识D 预测4.适合专家控制系统的是 DA 雷达故障诊断系统B 军事冲突预测系统C 聋哑人语言训练系统D 机车低恒速运行系统5.直接式专家控制通常由 B 组成A 控制规则集、知识库、推理机和传感器B 信息获取与处理、知识库、控制规则集和推理机C 信息获取与处理、知识库、推理机和传感器D 信息获取与处理、控制规则集、推理机和传感器6.专家控制可以称作基于 D 的控制;A 直觉B 逻辑C 预测D 知识7.直接式专家控制通常由 C 组成A 信息获取与处理、知识库、推理机构和传感器B 信息获取与处理、知识库、控制规则集和传感器C 信息获取与处理、知识库、推理机构和控制规则集D 信息获取与处理、控制规则集、推理机构和传感器8.专家系统的核心部分是 BA 人机接口、过程接口、推理机构B 知识库、数据库、推理机构C 人机接口、知识获取结构、推理机构 D知识库、数据库、人机接口9.以下不属于专家系统知识表示法的是 CA 彩色Petri网络B 语义知识表示C 样本分类D 产生式规则10.产生式系统的推理方式不包括 CA 正向推理B 反向推理C 简单推理D 双向推理11.肺病诊断专家系统使用的知识表示方法为 DA 语义网络B 产生式规则C 剧本表示D 框架表示12.以下不属于专家系统组成部分的是 AA 专家B 数据库C 知识库D 解释部分13.黑板专家控制系统的组成有 CA 黑板、数据库、调度器B 数据库、知识源、调度器C黑板、知识源、调度器 D 黑板、规则库、调度器14.建立专家系统,最艰难“瓶颈”的任务是 BA 知识表示B 知识获取C 知识应用D 知识推理15.在专家系统中, D 是专家系统与用户间的人-机接口A 知识库B 数据库C 推理机D 解释机构16.产生式系统包含的基本组成 AA 知识库、规则库和数据库B 规则库、模型库和控制器C 知识库、规则库和模型库D 规则库、数据库和控制器第三章模糊控制1. 某模糊控制器输出信息的解模糊判决公式为101niU i i nUii u u u u ,该解模糊方法为 DA 最大隶属度法B 取中位数法C 隶属度限幅元素平均法D 重心法2.在温度模糊控制系统中,二维模糊控制器的输入是 AA 温度的误差e 和温度误差变化量d eB 控制加热装置的电压的误差e 和电压误差变化量deC 控制加热装置的电压的误差e 和温度误差变化量d eD 控制加热装置的电压的误差e 和温度误差变化量de3.下列概念中不能用普通集合表示的是 DA 控制系统B 低于给定温度C 工程师D 压力不足4.以下应采用模糊集合描述的是 BA 高三男生B 年轻C 教师D 社会5.总结手动控制策略,得出一组由模糊条件语句构成的控制规则,据此可建立DA 输入变量赋值表B 输出变量赋值表C 模糊控制器查询表D 模糊控制规则表6.某模糊控制器的语言变量选为实际温度与给定温度之差即误差e 、误差变化率△e ;以及加热装置中可控硅导通角的变化量u ,故该模糊控制器为AA 双输入一单输出B 单输出一单输入C 双输入一双输出D 单输出一双输入 7.在论域U 中,模糊集合A 的支集只包含一个点u ,且A u =1,则A 称为 BA 截集B 模糊单点C 核D 支集8.在模糊控制中,隶属度 CA 不能是1或0B 根据对象的数学模型确定C 反映元素属于某模糊集合的程度D 只能取连续值9.模糊集合中,A u =对应的元素u 称为 AA 交叉点B 模糊单点C 核D 支集10.在模糊控制器的推理输出结果中,取其隶属度最大的元素作为精确值,去执行控制的方法称为 BA 重心法B 最大隶属度法C 系数加权平均法D 中位数法11.若模糊集合A 表示模糊概念“老”,其隶属度函数为A ,则模糊概念“略 微老”相当于A λμ,其中 λ为, CA 2B 4C 1/2D 1/412. 若对误差、误差变化率论域X 、Y 中元素的全部组合计算出相应的控制量变化ij u ,可写成矩阵ij n m u ,一般将此矩阵制成 CA 输入变量赋值表B 输出变量赋值表C 模糊控制器查询表D 模糊控制规则表13.在温度模糊控制系统中,二维模糊控制器的输出是 CA 温度的误差eB 温度误差变化量d eC 控制加热装置的电压UD 控制加热装置的电压的误差e 和温度误差变化量d e14.以下的集合运算性质中,模糊集合不满足的运算性质 DA 交换律B 结合律C 分配律D 互补律15. 以下属于模糊集合表示方法的是 BA 重心法B 扎德法C 系数加权平均法D 中位数法16.在选定模糊控制器的语言变量及各个变量所取的语言值后,可分别为各语言变量建立各自的 CA 控制规则表B 控制变量赋值表C 语言变量赋值表D 论域量化表17.模糊控制方法是基于 DA 模型控制B 递推的控制C 学习的控制D 专家知识和经验的控制18. 以下应采用模糊集合描述的是 BA 学生B 大苹果C 老师D 演员19.若模糊集合A 表示模糊概念“老”,其隶属度函数为A ,则模糊概念“极老”相当于A λμ,其中 λ为, DA 2B 4C 1/2D 1/420.某液位模糊控制系统的语言变量选为实际温度与给定温度之差即误差e 以及加热装置中可控硅导通角的变化量u ,但不考虑温度误差变化率△e ,该模糊控制器应为 BA 双输入一单输出B 单输入一单输出C 双输入一双输出D 单输入一双输出21.模糊隶属度函数曲线的形状可以为 CA 椭圆形B 平行四边形C 梯形D 圆形22.在选定模糊控制器的语言变量及各个变量所取的语言值后,可分别为各语言变量建立各自的 CA 控制规则表B 控制查询表C 语言变量赋值表D 基本论域量化表23.某模糊控制器的语言变量选为实际水位与给定水位之差即误差e ,以及调节阀门开度的变化量u ,故该模糊控制器为 B .A. 单输出—双输入 B .单输入—单输出C. 双输入—双输出D. 双输入—单输出24.某一隶属度函数曲线的形状可以选为 CA 椭圆形B 圆形C 三角形D 正方形25. 模糊控制器的术语“正中”,可用符合 D 表示A PB B NMC ZED PM26. 以下关于模糊关系的正确说法是 BA 模糊关系是普通关系的一个特例B 模糊关系描述元素之间的关联程度C 模糊关系中的元素都是整数D 模糊关系矩阵一定是方阵27.模糊控制以模糊集合为基础,最早提出模糊集合的学者是 AB MamdaniC TakagiD Sugeno28.在模糊控制器的推理输出结果中,取其隶属度函数曲线与横坐标围成面积的重心作为输出值,去执行控制的方法称为 AA 重心法B 最大隶属度法C 系数加权平均法D 中位数法 29.下列概念中不能..用普通集合表示的是 DA 控制系统B 压力不足C 机电工程师D 低于给定温度30.在模糊控制中,隶属度 CA 不能是1或0B 是根据对象的数学模型确定的C 反映元素属于某模糊集合的程度D 只能取连续值31.最适合作为语言变量的值是 AA 速度B 天气C 特别D 表演32.若模糊集合A 表示模糊概念“老”,其隶属度函数为A ,则模糊概念“非常老”相当于A λμ,其中 λ为,C A 2B 4C 1/2D 1/4第4 章 神经网络1. BP 网络使用的学习规则是 BA 相关规则B 纠错规则C 竞争规则D 模拟退火算法2.BP 神经网络所不具备的功能是 CA 自适应功能B 泛化功能C 优化功能D 非线性映射功能3. 由于各神经元之间的突触连接强度和极性有所不同并可进行调整,因此人脑才具有 A 的功能;A 学习和存储信息B 输入输出C 联想D 信息整合4. 采用单层拓扑结构的神经网络是 AA Hopfield 网络B 生物神经网络C BP 网络D 小脑模型网络5. 单层神经网络,有两个输入,两个输出,它们之间的连接权有 BA 6个B 4个C 2个D 8个6. 神经网络直接逆控制是一种 B 控制;A 反馈B 前馈C 串级D 混合7.误差反向传播算法属于 B 学习规则A 无导师B 有导师C 死记忆D 混合 8.以下不属于...人工神经网络主要特点的是 BA 便于用超大规模集成电路或光学集成电路系统实现B 网络中含有神经元C 信息分布在神经元的连接上D 可以逼近任意非线性系统9.最适宜用于联想记忆的神经网络 DA BP 神经网络B 感知器网络C 自适应线性神经网络D Hopfield 网络10.PID 神经网络控制中,控制器使用了 CA CMAC 神经网络B Hopfield 网络C PID 神经网络 D 感知器网络11.下面哪个方程最好描述了Hebb 学习规则 AA 两个神经元同时兴奋或同时抑制时,它们之间连接权的强度增强B 两个神经元同时兴奋或同时抑制时,它们之间连接权的强度减弱C 两个神经元,一个兴奋,另一个抑制,它们之间连接权的强度增强D 两个神经元,一个兴奋,另一个抑制,它们之间连接权的强度不变12.在神经网络内模控制结构中,神经网络辨识器用来获得 AA 被控对象的正模型B 被控刘象的逆模型C 线性滤波器D 控制器13.单层神经网络,有三个输入,三个输出,它们之间的连接权有 BA 6个B 9个C 16个D 25个 14.多层前向神经网络与单层感知器相比较,下面 C 不是..多层网络所特有的特点A 采用误差反向传播算法B 含有一层或多层的隐层神经元C 神经元的数目可达到很多D 隐层激活函数采用可微非线性函数15.单层感知器网络可以 BA 解决异或问题B 实现样本分类C 进行优化计算D 实现函数逼近16.能够用于无导师学习的神经网络模型是 AA Hopfield 网络B CMAC 神经网络C BP 神经网络D 自适应线性神经网络17.连续型Hopfield 网络 BA 是前馈神经网络B 是单层反馈型非线性神经网络C 具有函数逼近问题D 是多层反馈型非线性神经网络18.离散Hopfield 网络 CA 是多层反馈网络B 是多层反馈网络C 具有联想记忆功能D 具有函数逼近功能19.神经网络PID 控制是一种 BA 前馈控制B 反馈控制C 开环控制D 混合控制20.单层感知器网络可以 DA 解决异或问题B 实现函数逼近C 进行优化计算D 实现样本分类21.连续型Hopfield 网络的神经元转移函数采用 AA .对称型Sigmoid 函数B .对称型阶跃函数C .分段线性转移函数D .阈值型转移函数22.在间接神经网络模型参考自适应控制中, BA 需要一个神经网络控制器B 需要一个神经网络控制器及一个神经网络辨识器C 需要两个神经网络控制器及一个神经网络辨识器D 需要一个神经网络控制器及两个个神经网络辨识器23.生物神经元的突触连接相当于神经元之间的 DA 输入连接B 输出连接C 绝缘D 输入输出接口24. 在间接神经网络模型参考自适应控制结构中,神经网络辨识器用来获得 AA 被控对象的正模型B 被控刘象的逆模型C 线性滤波器D 控制器25.生物神经元的组成包括细胞体、轴突、树突和 CA 轴突末梢B 细胞核C 突触D 细胞膜26.以下不属于人工神经网络主要特点的是 BA 信息并行处理B 网络中含有神经元C 信息分布在神经元的连接上D 可以逼近任意非线性系统27.一般认为,人工神经网络最适用于 BA 线性系统B 非线性系统C 多输入多输出系统D 多变量系统28.在直接神经网络模型参考自适应控制中, AA 需要一个神经网络控制器B 需要一个神经网络控制器及一个神经网络辨识器C 需要两个神经网络控制器及一个神经网络辨识器D 需要一个神经网络控制器及两个个神经网络辨识器29.离散型Hopfield网络的神经元转移函数采用 D A.对称型Sigmoid函数 B.对称型阶跃函数C.分段线性转移函数 D.阈值型转移函数30.采用单层拓扑反馈结构的神经网络是 AA Hopfield网络B BP网络C PID神经网络D 小脑模型神经网络31.基于多层前向神经网络的PID控制系统结构有 D 内含神经网络的环节;A 一个B 四个C 三个D 两个32.最早提出人工神经网络模型的学者是 BA HebbB McCulloch和 PittsC RosenblattD Hopfield33.神经网络内模控制具有 CA 直接逆控制的优点和缺点B 直接逆控制的优点C 直接逆控制的优点,但无直接逆控制的缺点D 直接逆控制的缺点第5章遗传算法1.最早提出遗传算法概念的学者是 AD2.遗传算法的基本操作顺序是 CA 计算适配度、交叉、变异、选择 B计算适配度、交叉、选择、变异C计算适配度、选择、交叉、变异 D 计算适配度、选择、交叉、变异3.能够往种群中引入新的遗传信息是以下哪种遗传算法的操作 DA 交叉B 复制C 优选D 变异4.哪一种说法是对遗传算法中复制操作的描述 AA 个体串按照它们的适配值进行复制B 随机改变个体串的适配度函数值C 随机改变一些串中的一小部分D 为权值随机产生小的初始值5.遗传算法中,关于变异操作的最好叙述是 AA 随机改变一些“串”中的一小部分B 随机挑选新“串”组成下一代C 为权随机产生新的初始值D 从两个“串”中随机组合遗传信息6.哪种遗传算法的操作,能够从种群中淘汰适应度值小的个体 CA 交叉B 优选C 复制D 变异7.遗传算法将问题的求解表示成“染色体”,“染色体”实际上是 DA 基因B 适应度函数C 种群D 用编码表示的字符串8.哪种遗传算法的操作,可以从父代双亲中继承部分遗传信息,传给子代 AA 交叉B 变异C 复制D 共享9.下面哪种类型的学习能够用于移动机器人的路径规划 DA 多层前向神经网络B PID神经网络C 自适应线性神经网络D 遗传算法10.轮盘赌技术可用于 BA 选择最好的“染色体”B 随机选择“染色体”C 交叉所选择的“染色体”D 变异“染色体”的适应度11.遗传算法将问题的求解表示成“染色体”,“染色体”实际上是 CA 种群B 存在于细胞核中能被碱性染料染色的物质C 用编码表示的字符串D 各种数值12.在遗传算法中,复制操作可以通过 B 的方法来实现 A 解析B 随机C 交叉匹配D 变异判断题第一章绪论1.与传统控制相比较,智能控制方法可以较好地解决非线性系统的控制问题; √2.智能控制系统采用分层递阶的组织结构,其协调程度越高,所体现的智能也越高; √3.分层递阶智能控制按照自下而上精确程度渐减、智能程度渐增的原则进行功能分配; √4.智能系统是指具备一定智能行为的系统; √5.智能控制的不确定性的模型包括两类,一类是模型未知或知之甚少;另一类是模型的结构和参数可能在很大范围内变化; √第二章专家系统1.在专家系统中,数据库是领域知识的存储器,是系统的核心部分之一;√2.在设计专家系统时,知识工程师的任务是提供解决问题的知识和经验;×3.数据库和推理机是专家系统的核心部分;应为知识库×4.按照执行任务分类,专家系统有解释型、预测型、诊断型、调试型、维修型等多种类型; √5.专家系统实质上是一种数学计算系统; ×6.在设计专家系统时,知识工程师的任务是模仿人类专家,运用他们解决问题的知识和经验; √第三章模糊控制1.模糊控制只是在一定程度上模仿人的模糊决策和推理,用它解决较复杂问题时,还需要建立数学模型; ×2.在模糊控制中,为把输入的确定量模糊化,需要建立模糊控制规则表; 应该是确定模糊集合×3.在模糊集合的向量表示法中,隶属度为0的项必须用0代替而不能舍弃;√4.从模糊控制查询表中得到控制量的相应元素后,乘以比例因子即为控制量的变化值; √5.与传统控制相比,智能模糊控制所建立的数学模型因具有灵活性和应变性,因而能胜任处理复杂任务及不确定性问题的要求; ×6.在模糊语言变量中,语义规则用于给出模糊集合的隶属函数; √7.模糊控制对被控对象参数的变化不敏感,可用它解决非线性、时变、时滞系统的控制; √8.普通关系是模糊关系的推广,它描述元素之间的关联程度; ×9.模糊控制就是不精确的控制; ×10.在模糊控制中,为把输入的确定量模糊化,需要建立语言变量赋值表;√11.模糊控制规则是将人工经验或操作策略总结而成的一组模糊条件语句√12.通常,模糊控制器的输入、输出语言变量分别取为控制系统的误差和误差变化率; ×13.模糊控制器的输入语言变量一般可取控制系统的误差及其变化率;√14.模糊控制只是在一定程度上模仿人的模糊决策和推理,用它解决较复杂问题时,还需要建立数学模型; ×15.T-S模糊控制系统采用系统状态变化量或输入变量的函数作为IF-THEN模糊规则的后件,不可以描述被控对象的动态模型;×16.Mamdani型模糊控制器,通过模糊推理得到的结果是精确量; ×17.在模糊控制中,隶属度是根据对象的数学模型来确定的; ×18.模糊控制中,语言变量的值可用“负大、负小、零”等表示; √19.模糊控制在一定程度上模仿人的模糊决策和推理,用它解决较复杂问题时,不需要建立数学模型; √第四章神经网络1.可以充分逼近任意复杂的非线性函数关系是神经网络的特点之一;√2.一般情况下,神经网络系统模型的并联结构可以保证系统辨识收敛;×3.反馈型神经网络中,每个神经元都能接收所有神经元输出的反馈信息;√4.运算效率高,收敛速度快是BP神经网络的主要特点之一; ×5. 神经元的各种不同数学模型的主要区别在于采用了不同的转移函数,从而使神经元具有不同的信息处理特性; √6.离散Hopfield网络的两种工作方式是同步和异步工作方式; √7.神经网络已在多种控制结构中得到应用,如PID控制、内模控制、直接逆控制等; √8.一般情况下,神经网络系统模型的串-并联型结构不利于保证系统辨识模型的稳定性; ×9.BP神经网络是一种多层全互连型结构的网络; ×10.离散型单层感知器的转移函数一般采用阈值符号函数; √ 11.Hopfield网络的吸引子是指网络的稳定状态; √12.两关节机械手的控制可应用小脑神经网络直接逆模型控制; √13.神经网络用于系统正模型辨识的结构只有串联结构一种; ×14.连续型Hopfield网络是多层前馈型神经网络,每一节点的输出均反馈至节点的输入; ×第五章遗传算法1.遗传算法的复制操作可以通过随机方法来实现,可使用计算机,也可使用轮盘赌的转盘; √2.在遗传算法中,初始种群的生成不能用随机的方法产生; ×3.遗传算法的复制操作有严格的程序,不能通过随机方法来实现;×4.遗传算法具有进化计算的所有特征,其主要用途是数值计算; ×5.遗传算法中,适配度大的个体有更多机会被复制到下一代; √ 6.在遗传算法中,初始种群的生成不能用随机的方法产生; ×名词解释第一章1. 智能控制有知识的“行为舵手”,它把知识和反馈结合起来,形成感知-交互集、以目标为导向的控制系统;第二章1. 专家系统一种包含知识和推理的人工智能的计算机程序系统,这些程序软件具有相当于某个专门领域专家的知识和经验水平,同时具有处理该领域问题的能力2. 语义网络通过概念及相互间语义关系,图解表示知识网络;3. 专家控制系统应用专家系统的概念、原理和技术,模拟人类专家的控制知识和经验而建造的控制系统;第三章1. 模糊控制模糊控制是把人类专家对特定的被控对象或过程的控制策略总结成一系列的控制规则,通过模糊推理得到控制作用集,作用于被控对象或过程;它无需建立系统模型,是解决不确定系统的一种有效途径;2. 模糊系统一种基于知识或基于规则的系统;它的核心就是有IF-THEN 规则形成的知识库;3. 模糊集合论域U 上的模糊集A 用一个在区间0,1上取值的隶属度函数Au 来表示;4. 隶属度某元素属于模糊集合A 的程度称为隶属度,用隶属度函数Ax 描述;隶属度函数的值是闭区间0,1上的一个数,表示元素x 属于模糊集合A 的程度;5. 模糊关系X 与Y 直积 (){},|, X Y x y x X y Y ⨯=∈∈中一个模糊子集R ,称为从X 到Y 的模糊关系;第四章1.神经网络神经元互连组成的网络,从微观结构和功能上对人脑抽象、简化,是模拟人类智能的一条重要途径,反映人脑功能的若干特征,如并行处理、学习联想、分类等;2.小脑模型神经网络由局部调整、相互覆盖接收域的神经元组成,模拟人的小脑学习结构;是一种基于表格查询式输入输出多维非线性映射能力;3. Hopfield 神经网络全连接型反馈动态神经网络,分为离散型和连续型两种,网络达到稳定状态时,其能量函数达到最小;第五章1.变异操作模拟生物在自然遗传环境下由于各种偶然因素引起的基因突变,它以很小的概率随机改变遗传基因表示染色体的符号串的某一位的值;2.适应度函数遗传算法中某个个体对环境的适应程度,适应值函数可由目标函数变换而成;3.遗传算法建立在自然选择和群体遗传学机理基础上的随机迭代和进化,具有广泛适用性的搜索方法;简答题第一章1.智能控制的主要功能特点是什么;1多层递阶的组织结构2多模态控制3自学习能力4自适应能力5自组织能力2.智能控制的研究对象具备哪些特点3.不确定性的模型;高度的非线性;复杂的任务要求;4.与传统控制相比,智能控制的主要特点是什么1处理复杂性、不确定性问题的能力;2描述系统的模型更为广泛;3具有学习、适应、组织的功能;4具有分层信息处理和决策机构;5控制其与对象、环境没有明显的分离;5.智能控制有哪些主要类型(1)模糊控制(2)神经网络控制(3)专家控制(4)分层递阶智能控制第二章1.专家系统中,知识表示方法有哪些常用形式2.3.;1.设max max max,则比例因子K u= u max/n2.设计一个模糊控制器必须要解决哪三个关键问题1 设计模糊控制器要解决的第一个问题是如何把确定量转换为对应的模糊量;2 根据操作者的控制经验制定模糊控制规则,并执行模糊逻辑推理,以得到一个输出模糊集合,这一步称为模糊控制规则形成和推理;3 需要为模糊输出量进行解模糊判决,实现控制;3.在模糊控制器的设计中,常用的模糊判决方法有哪些(1)最大隶属度法(2)加权平均法(3)重心法(4)取中位数法4.模糊控制中,描述语言变量常见的语言值有哪几种语言变量常见的语言值是负大NB、负中NM、负小NS、负零NO、正零PO、正小PS、正中PM、正大PB;。
人工智能与科学之美智慧树知到答案章节测试2023年湘潭大学

绪论单元测试1.2016年被称为人工智能元年。
()A:错B:对答案:B第一章测试1.在《列子·汤问》一书中在记载了人们对智能机器人的早期幻想,文中机器人是由什么时期的能工巧匠建造而成?()A:商朝时期B:西汉时期C:东汉时期D:西周时期答案:D2.()不属于百度大脑核心技术。
A:视觉技术B:数据加工C:语音技术D:深度学习答案:B3.下面关于图灵测试,哪种说法是错误的。
()A:图灵测试在我们还无法用科学的、可量化的标准对人类智慧这个概念做一个定义的时候,给出了一个可行的确定对方是否具备人类智慧的测试方法,推动了计算机科学和人工智能的发展.B:图灵测试是由一个叫做艾伦·图灵的人提出的,是人工智能科学最重要的任务和事件之一。
C:1950年图灵提出了著名的图灵测试:如果一台机器能够与人类展开对话(通过电传设备)而不能被辨别出其机器身份,那么称这台机器具有智能。
D:图灵预测称:到2000年,人类应该可以用10GB的计算机设备,制造出可以在10分钟的问答中骗过20%成年人的人工智能。
答案:D4.以下()属于人工智能领域。
A:专家系统B:自动化C:语音识别D:图像识别答案:ACD5.连接主义依赖于软件路线,通过启发性程序设计,实现知识工程和各种智能算法。
()A:错B:对答案:A6.我们现在处于人工智能的哪个阶段?()。
A:知识应用期B:形成期C:暗淡期D:集成发展期答案:D7.人工智能的三大学派中,适合做推理的是()。
A:符号主义B:行为主义C:连接主义D:数字主义答案:A8.属于人工智能产品的有()。
A:医疗机器人B:扫地机器人C:普通汽车D:小爱同学答案:ABD9.()为形式逻辑奠定了基础。
A:亚里士多德B:弗雷格C:莱布尼兹D:维纳答案:A10.个人助理有四大作用,包括语音输入、语音助理、陪护机器人、家庭管家。
()A:错B:对答案:B第二章测试1.以下哪些是规则?()A:如果头痛且流涕,则可能患了感冒B:太阳从东边升起C:一年有春夏秋冬四个季节D:雪是白色的答案:A2.知识具有的不确定性有哪些类型?()A:由不完全性引起的不确定性B:由模糊性引起的不确定性C:由经验引起的不确定性D:由随机性引起的不确定性答案:ABCD3.以下选项中,()是知识图谱的一种通用表示方式。
智能控制技术-第三章

一个简单的求中间隶属度值的求取。
在模糊控制系统中,变量的量化给出了控 制器计算的简化和控制值的平滑之间的一 个折衷,为了消除大的误差,在量化级之 间的一些插值运算是必要的。
一个简单的方法是引入一个权系数w(.):对 于一个连续的测量值可以通过相邻两个离 散值的加权运算得到模糊度的值。
模糊控制器结构指的是输入输出变 量、模糊化算法、模糊推理规则和精确 化计算方法。
控制器的设计第一步首先确定控制器的输 入输出变量。
1、控制器输入输出变量
主要讲单输入-单输出模糊控制结构。
单输入-单输出模糊控制结构指的是系 统控制量只有一个,系统输出量只有一个。
单输入-单输出模糊控制结构又分一维模糊 控制器、二维模糊控制器和多维模糊控制 器。
m
vik i
v0
i1 m
ki
i1
ki视情况而定。如果,那么加权平均法就变为重 心法。
面积重心法对于不同的隶属度函数形状会
有不同的推理输出结果。最大隶属度函数 法对隶属度函数的形状要求不高。
第二节 模糊控制系统设计
一、模糊控制器的结构设计 在设计模糊控制器前,首先根据被
控对象的具体情况来确定模糊控制器的 结构。
设被控对象用以下三个控制规律描述:
规律1: 如果Yn=PM 且Un=PM 那么Yn+1=PB; 规律2: 如果Yn=PS 且Un=NS 那么Yn+1=ZE; 规律3: 如果Yn=NS 且Un=PS 那么Yn+1=ZE; 规律4: 如果Yn=NM 且Un=NM 那么Yn+1=NB; 其中Y是输出,U是控制,n是离散时间。
例如:两个输出变量A、B下的一个模糊空 间划分示意图。
3第三章 分级递阶智能控制

2011-9-22
9
3.1 递阶智能控制基本原理
一、递阶控制的基本原理 一、递阶控制的基本原理 2.递阶控制的基本原理 递阶控制的基本原理是把一个总体问题 P 分解成若干有限 数量的子问题 Pi ( i=1, 2 , … , n )。总体问题 P 的目标是 使复杂系统的总体性能指标取得极值,当不考虑各子问题之间 的关联时,有 [P1, P2, … , Pn]的解 ⇒ P 的解 考虑到子问题之间因存在关联而可能产生冲突(即耦合作 用),现引入一个协调参数,以解决关联产生的目标冲突。用
8
3.1 递阶智能控制基本原理
一、递阶控制的基本原理 一、递阶控制的基本原理 递阶控制系统主要有以下3种基本的递阶形式: 种基本的递阶形式 ①多重描述(Stratified description):主要从建模角 多重描述 度考虑; ②多层描述(Multilayer description):把一个复杂的 多层描述 决策问题进行纵向分解; ③多级描述(Multilevel description):考虑各子系统 多级描述 之间的关联,将每一层的决策问题横向分解。 这三种递阶形式可以单独或组合存在于一个大系统之中。
2011-9-22 4
3.1 递阶智能控制基本原理
一、递阶控制的基本原理 一、递阶控制的基本原理 ①集中控制系统
在集中控制系统中,控制中心直接控制每个子系统,每个子系 统只得到整个系统的部分信息,控制目标相互独立。其优点是系统 运行的有效性较高,便于分析与设计;缺点是一旦控制中心出现故 障,则整个系统将瘫痪。集中控制系统的一般结构如图3.1所示。
2011-9-22 14
3.1 递阶智能控制基本原理
二、分级递阶智能控制系统的基本结构 二、分级递阶智能控制系统的基本结构 ☞ 协调级一般由多个协调控制器和分配器组成,每个协调控 制器既接受组织级的命令,又负责多个执行级控制器的协调。 ☞ 分配器的任务是将组织级给定的基本事件(任务)的顺序 变换成面向协调器的控制动作,并在适当时刻把它们分配给相 应的协调器。在完成任务后,分配器也负责生成反馈信息,送 回给组织级。 ☞ 协调级是组织级与执行级之间的接口,运算精度相对较 低,但有较高的决策能力与一定的学习能力。
(完整word版)智能控制技术(第三章)答案
3—1 模糊逻辑控制器由哪几部分组成?各完成什么功能?答:模糊控制系统的主要部件是模糊化过程、知识库(数据库和规则库)、推理决策和精确化计算.1、模糊化过程 模糊化过程主要完成:测量输入变量的值,并将数字表示形式的输入量转化为通常用语言值表示的某一限定码的序数.2、知识库 知识库包括数据库和规则库。
1)、数据库 数据库提供必要的定义,包含了语言控制规则论域的离散化、量化和正规化以及输入空间的分区、隶属度函数的定义等。
2)、规则库 规则库根据控制目的和控制策略给出了一套由语言变量描述的并由专家或自学习产生的控制规则的集合。
它包括:过程状态输入变量和控制输出变量的选择,模糊控制系统的建立。
3、推理决策逻辑 推理决策逻辑是利用知识库的信息模拟人类的推理决策过程,给出适合的控制量。
(它是模糊控制的核心).4、精确化过程 在推理得到的模糊集合中取一个能最佳代表这个模糊推理结果可能性的精确值的过程称为精确化过程。
{模糊控制器采用数字计算机。
它具有三个重要功能:1) 把系统的偏差从数字量转化为模糊量(模糊化过程、数据库两块); 2) 对模糊量由给定的规则进行模糊推理(规则库、推理决策完成);3)把推理结果的模糊输出量转化为实际系统能够接受的精确数字量或模拟量(精确化接口)。
3—2 模糊逻辑控制器常规设计的步骤怎样?应该注意哪些问题? 答:常规设计方法设计步骤如下:1、 确定模糊控制器的输入、输出变量2、 确定各输入、输出变量的变化范围、量化等级和量化因子3、 在各输入和输出语言变量的量化域内定义模糊子集。
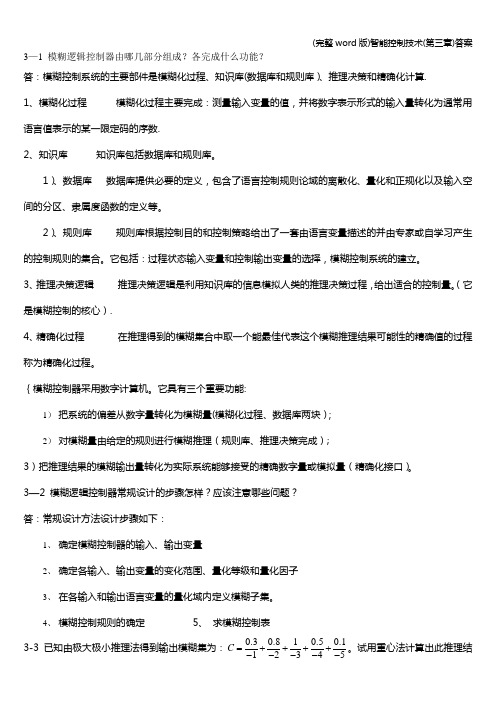
4、 模糊控制规则的确定5、 求模糊控制表3-3 已知由极大极小推理法得到输出模糊集为:0.30.810.50.112345C =++++-----。
试用重心法计算出此推理结果的精确值z. 重心法重心法 是取模糊隶属度函数的曲线与横坐标围城面积的重心为模糊推理最终输出值。
连续:0()()v VvVv v dvv v dvμμ=⎰⎰ 离散:101()()mkvkk mvkk v v v v μμ===∑∑采用离散重心法:101()()0.3(1)0.8(2)1(3)0.5(4)0.1(5)0.30.810.50.10.3(1)0.8(2)1(3)0.5(4)0.1(5)2.7=-2.7407mkvkk mvkk v v v v μμ===⨯-+⨯-+⨯-+⨯-+⨯-=++++⨯-+⨯-+⨯-+⨯-+⨯-=∑∑ 3—5 设在论域(){42024}e =--误差,,,,和控制电压{024,6,8}u =,,上定义的模糊子集的隶属度函数分别如图3—21、图3—22所示。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
.
3-1 模糊逻辑控制器由哪几部分组成各完成什么功能
答:模糊控制系统的主要部件是模糊化过程、知识库(数据库和规则库)、推理决策和精确化计算。
1、模糊化过程 模糊化过程主要完成:测量输入变量的值,并将数字表示形式的输入量转化为通常用语言值表示的某一限定码的序数。
2、知识库 知识库包括数据库和规则库。
1)、数据库 数据库提供必要的定义,包含了语言控制规则论域的离散化、量化和正规化以及输入空间的分区、隶属度函数的定义等。
2)、规则库 规则库根据控制目的和控制策略给出了一套由语言变量描述的并由专家或自学习产生的控制规则的集合。
它包括:过程状态输入变量和控制输出变量的选择,模糊控制系统的建立。
3、推理决策逻辑 推理决策逻辑是利用知识库的信息模拟人类的推理决策过程,给出适合的控制量。
(它是模糊控制的核心)。
4、精确化过程 在推理得到的模糊集合中取一个能最佳代表这个模糊推理结果可能性的精确值的过程称为精确化过程。
—
{模糊控制器采用数字计算机。
它具有三个重要功能:
1) 把系统的偏差从数字量转化为模糊量(模糊化过程、数据库两块); 2) 对模糊量由给定的规则进行模糊推理(规则库、推理决策完成); 3)把推理结果的模糊输出量转化为实际系统能够接受的精确数字量或模拟量(精确化接口)。
3-2 模糊逻辑控制器常规设计的步骤怎样应该注意哪些问题 答:常规设计方法设计步骤如下:
1、 确定模糊控制器的输入、输出变量
2、 确定各输入、输出变量的变化范围、量化等级和量化因子
3、
.
4、 在各输入和输出语言变量的量化域内定义模糊子集。
5、 模糊控制规则的确定 5、 求模糊控制表
3-3 已知由极大极小推理法得到输出模糊集为:0.30.810.50.1
12345
C =
++++
-----.试用重心法计算出此推理结果的精确值z 。
重心法
重心法 是取模糊隶属度函数的曲线与横坐标围城面积的重心为模糊推理最终输出值。
连续:0()()v V
v
V
v v dv
v v dv
μμ=
⎰⎰ 离散:101
()
()
m
k
v
k
k m
v
k
k v v v v μμ===
∑∑
采用离散重心法:
101
()
()
0.3(1)0.8(2)1(3)0.5(4)0.1(5)0.30.810.50.1
0.3(1)0.8(2)1(3)0.5(4)0.1(5)2.7
=-2.7407
m
k
v
k
k m
v
k
k v v v v μμ===
⨯-+⨯-+⨯-+⨯-+⨯-=
++++⨯-+⨯-+⨯-+⨯-+⨯-=
∑∑ 3-5 设在论域(){42024}e =--误差,,,,和控制电压{024,6,8}u =,,上定义的模糊子集的隶
属度函数分别如图3-21、图3-22所示。
'
已知模糊控制规则:
规则1: 如果误差e 为ZE ,则u 为ZE ; 规则2: 如果误差e 为PS ,则u 为NS ;
试应用玛达尼推理法计算当输入误差0.6e =时,输出电压u =(精确化计算采用重心法) 解:
根据输入和输出变量的个数,所需规则的最大数目。
由于 *
规则1: 如果误差e 为ZE ,则u 为ZE ; 规则2: 如果误差
e 为PS ,则u 为NS ; 解:
1)
*
2) 模糊化过程 当输入误差e 为,
看图1,0.6e =,正小u1= 零u2=
3) 模糊逻辑推理
~
根据已知模糊控制规则:
规则1: 如果误差e 为ZE ,则u 为
ZE ; 规则2: 如果误差e 为PS ,则u 为NS ;
对应规则库对应规则1:误差e 为ZE 的隶属度是,那么u 为ZE 的隶属度0.7μ= 对应规则2:误差e 为PS 的隶属度是,那么u 为NS 的隶属度0.3μ= 4) 精确化计算: 重心法
输出的电压u 为
0.6
2.6
3.4
4.662
00.6 2.6 3.4 4.60.6 2.6 3.4 4.6600.6 2.6 3.4 4.6()()1260.30.7()222126
0.30.7()2228.06 2.42003.3306
U
u U
u u udu u u du
u u u du udu udu udu udu u u udu du du du du μ
μ
=
--++++-=--++++-=
=⎰⎰⎰⎰⎰⎰⎰⎰⎰⎰⎰⎰ 输出电压为。