STM32的485最简单例程
(完整word版)STM32的485最简单例程
485最基本的半双工通信配置采用STM32F103ZET6串口3连接485芯片通信口,485芯片的A,B通过485转串口模块与电脑相连,完成在串口软件上输入输出功能。
串口3,配置函数:void USART3_Config(void){GPIO_InitTypeDef GPIO_InitStructure;USART_InitTypeDef USART_InitStructure;NVIC_InitTypeDef NVIC_InitStructure;RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB | RCC_APB2Periph_AFIO, ENABLE);RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART3, ENABLE);// USART3_TX —> PB10 , USART3_RX —> PB11GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;GPIO_InitStructure。
GPIO_Mode = GPIO_Mode_AF_PP;GPIO_InitStructure。
GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB,&GPIO_InitStructure);GPIO_InitStructure。
GPIO_Pin = GPIO_Pin_11;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB, &GPIO_InitStructure);USART_ART_BaudRate = 115200; // 1200;USART_ART_WordLength = USART_WordLength_8b;USART_ART_StopBits = USART_StopBits_1;USART_ART_Parity = USART_Parity_No; //USART_Parity_Even;USART_ART_HardwareFlowControl = USART_HardwareFlowControl_None;USART_InitStructure。
rt_thread 下485组件的接收范例
rt_thread 下485组件的接收范例一、概述本范例介绍如何在RT-Thread实时操作系统下使用485组件接收数据。
RT-Thread是一个开源的实时操作系统,广泛应用于嵌入式系统开发。
本范例将通过示例代码,展示如何配置和使用485组件接收数据。
二、准备工作1.确保已安装RT-Thread实时操作系统,并配置好开发环境。
2.准备用于测试的485设备,并确保其已连接到目标硬件。
三、代码示例以下是一个简单的代码示例,展示了如何在RT-Thread中使用485组件接收数据:```c#include<rtthread.h>#include<rtdevice.h>intmain(){//初始化485设备rt_device_t*dev=rt_device_find(0,"48500");//假设设备编号为0,设备名称为"48500"if(!dev){rt_kprintf("Failedtofind485device.\n");return-1;//配置485设备参数rt_device_open(dev,0);//打开设备rt_device_write(dev,0,"mode=rs485,rts_level_for_tx=1",21) ;//设置485模式为RS485,rts线在发送数据时保持高电平//进入接收模式rt_device_set_rx_threshold(dev,1024);//设置接收阈值为1024字节rt_device_enable_rx(dev);//开启接收模式//循环接收数据while(1){rt_uint8_tdata[1024];//用于存储接收到的数据rt_size_tsize=rt_device_rx(dev,data,sizeof(data));//接收数据,返回实际接收到的字节数if(size>0){//处理接收到的数据...//这里可以根据实际需求对接收到的数据进行解析、存储或发送给其他设备等操作}}return0;}上述代码中,我们首先通过`rt_device_find`函数找到对应的485设备,并使用`rt_device_open`函数打开设备。
STM32F407VGT6的485通信程序【SP34

【SP3485芯片&xx接收】本例程为STM32F4XX(M4内核)的485通信程序,采用串口1发送和接收数据,中断接收,将接收到的数据重新发送出去。
主函数文件如下:#include ""/**********************************************************\**文件名:****************************************库版本:***********工作环境:RealView MDK-ARM ***********************作者:曾有根***************************************生成日期:2012-08-03 ************************************功能:RS485通过串口1发送,中断接收!将接收到*****的数据通过再次发送出去*********************\************************************************ **********/extern void uart_init(void);extern void USART1_SendByte(u8 Data);extern unsigned char UART1_GetByte(u8 GetData);extern void delay(unsigned int dl);void delay(unsigned int dl){unsigned int i,y;for(i = 0; i < 5000; i++){for(y = 0; y < dl; y++);}}static void led_init(void){GPIO_InitTypeDef GPIO_InitStructure;/* Enable the GPIO_LED Clock */RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOE, ENABLE);/* Configure the GPIO_LED pin */= GPIO_Pin_7 | GPIO_Pin_8 ;= GPIO_Mode_OUT;= GPIO_OType_PP;= GPIO_PuPd_UP;= GPIO_Speed_50MHz;GPIO_Init(GPIOE, &GPIO_InitStructure);}int main(void){uart_init();led_init();while (1){USART1_SendByte(0x12);GPIO_SetBits(GPIOE, GPIO_Pin_7 ); //LED1灯闪烁,表示数据发送完成delay(1000);GPIO_ResetBits(GPIOE, GPIO_Pin_7 );delay(1000);}}串口配置程序,文件如下:#include ""extern void delay(unsigned int dl);#define TX_485 GPIO_SetBits(GPIOA,GPIO_Pin_8);#define RX_485 GPIO_ResetBits(GPIOA,GPIO_Pin_8);void USART1_SendByte(u8 SendData){TX_485;//打开发送控制端delay(10);//延时,这个必须加上,不加会导致数据出错USART_SendData(USART1,SendData);//发送数据while(USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);//等待数据发送完成delay(10);RX_485;//关闭发送控制端}unsigned char UART1_GetByte(u8 MidData){RX_485;//打开接收控制端delay(10);//延时,同样必须加上MidData = USART_ReceiveData(USART1);//接收数据delay(10);TX_485;//关闭接收控制端return MidData;}void USART1_IRQHandler(u8 GetData){u8 BackData;if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET)//中断产生{GetData = UART1_GetByte(BackData);//直接读取寄存器的数据也行GetData = USART1->DR;USART1_SendByte(GetData);//发送数据GPIO_SetBits(GPIOE, GPIO_Pin_8 );//LED2灯闪烁,表示数据接收成功且发送完成delay(1000);GPIO_ResetBits(GPIOE, GPIO_Pin_8 );}}void uart_init(void){USART_InitTypeDef USART_InitStructure;NVIC_InitTypeDef NVIC_InitStructure;GPIO_InitTypeDef GPIO_InitStructure;/* Enable GPIO clock */RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);/* Enable USART clock */RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);/* Connect USART pins to A9\10 */GPIO_PinAFConfig(GPIOA, GPIO_PinSource9,GPIO_AF_USART1);GPIO_PinAFConfig(GPIOA, GPIO_PinSource10,GPIO_AF_USART1);/* Configure USART Tx and Rx as alternate function push-pull */= GPIO_Pin_9;//输出TX= GPIO_Speed_50MHz;= GPIO_Mode_AF;//必须为AF,OUT不行= GPIO_OType_PP;= GPIO_PuPd_UP;GPIO_Init(GPIOA, &GPIO_InitStructure);= GPIO_Pin_10;//输入RX= GPIO_Mode_AF;//必须为AF,与M3不同GPIO_Init(GPIOA, &GPIO_InitStructure);= GPIO_Pin_8 ;//485使能端配置= GPIO_Mode_OUT;= GPIO_OType_PP;= GPIO_PuPd_UP;= GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure);= 115200;= USART_WordLength_8b;= USART_StopBits_1;= USART_Parity_No;= USART_HardwareFlowControl_None;= USART_Mode_Rx | USART_Mode_Tx;USART_Init(USART1, &USART_InitStructure); NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1); = USART1_IRQn;= 1;= 0;= ENABLE;NVIC_Init(&NVIC_InitStructure);/* Enable USART */USART_Cmd(USART1, ENABLE);USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);USART_ClearFlag(USART1, USART_FLAG_TC);}说明:已经经本人下载至STM32F4的开发板上成功调试,并且能够正确的收发数据!可供广大奋斗在前线的机油们参考!。
发个STM32的MODBUS主节点程序

发个STM32的MODBUS主节点程序由于课题的原因被强迫用了STM32(本来打算2440的),因此认识阿莫电子,看到了版上一众高手,并学了不少知识。
在课题中很多芯片资料的细节都是来源于阿莫电子,快毕业了,潜水了太久,就分享一点STM32的程序,反正很多都是从坛子里学的,我只是整理下拿来用了,献丑了。
处理器STM32F103ZET6是买论坛上一摄像头大师的(感谢免费帮我修了次3232),软件用的KEIL3.5。
我的MODBUS是驱动变频器的,做主节点用,主要实现03功能号和06功能号。
#define RS485Read (GPIO_WriteBit(GPIOG, GPIO_Pin_13,Bit_RESET))#define RS485Write (GPIO_WriteBit(GPIOG, GPIO_Pin_13,Bit_SET))//MODBUS的06功能号,读多个寄存器void ReadInverter(UINT16 Addr,UINT8 N,UINT16 *Values){UINT8 i,l;UINT16 tmp;UINT16 *p;//在发送缓冲里面填数据Inverter.SendBuf[0]=InverterAddr;Inverter.SendBuf[1]=ReadID;Inverter.SendBuf[2]=Addr>>8;Inverter.SendBuf[3]=Addr&0XFF;Inverter.SendBuf[4]=0;Inverter.SendBuf[5]=N;//计算CRC16,填入发送缓冲尾CalCRC(Inverter.SendBuf,6,Inverter.SendBuf+6);//置RS485发送状态RS485Write();//发送数据缓冲Uart_Send(InverterUart,Inverter.SendBuf,8);//清发送缓冲PurgeRecvBuf();m=LISTENING;//关定时器TIM5TIM_Cmd(TIM5, DISABLE);USART_ITConfig(InverterUart,USART_IT_RXNE,ENABLE);RS485Read();Delay(200,m);//既定延时400ms,若m的值变化则退出ResetInverterComm();m=TIME_OUT;//接收缓冲中数据长度为0,则表示超时无应答if(Inverter.Length==0){Inverter.Error=TIME_OUT; //("变频器应答超时");return ;}m=FINISHED;//长度校验if(Inverter.RecvBuf[2]!=Inverter.Length-5){Inverter.Error=FrameErr;return ;//("变频器数据长度错误");}CalCRC(Inverter.RecvBuf,Inverter.Length-2,CRC16);//CRC校验if(*(UINT16 *)(CRC16)!=*(UINT16 *)(Inverter.RecvBuf+Inverter.Length-2)) {Inverter.Error=CheckErr;return ;//("变频器校验错误");}else if(Inverter.RecvBuf[1]==ReadID+0X80){//("变频器读错误,错误号在第三个字节");switch(Inverter.RecvBuf[2]){case Invalid_Func:i =Invalid_Func; break;case Invalid_Addr:i =Invalid_Addr; break;case Invalid_Data:i =Invalid_Data; break;case InverterErr :i =InverterErr ; break;case InverterBusy:i =InverterBusy; break;case CheckErr :i =CheckErr ; break;default :i =UnknowErr ; break;}Inverter.Error=i;return ;}//校验一切正常,变频器操作成功else if(Inverter.RecvBuf[1]==ReadID){l=Inverter.RecvBuf[2]+3;p=(UINT16 *)Values;//接收数据for(i=3;i<l;i+=2){tmp=Inverter.RecvBuf[i];tmp=tmp<<8;tmp=tmp+Inverter.RecvBuf[i+1];*p=tmp;p++;}Inverter.Error=MODBUS_OK;//("读入参数成功:");return ;}//校验一切正常,变频器操作失败else if(Inverter.RecvBuf[1]!=ReadID&&Inverter.RecvBuf[1]!=ReadID+0X80) {Inverter.Error=UnknowErr;//("变频器应答错误");return ;}return ;}void TIM5_IRQHandler(void){if(TIM_GetITStatus(TIM5,TIM_IT_Update)!=RESET){TIM_ClearITPendingBit(TIM5, TIM_IT_Update);TIM_ClearFlag(TIM5, TIM_IT_Update);m=FINISHED;TIM_Cmd(TIM5, DISABLE);USART_ITConfig(InverterUart,USART_IT_RXNE,DISABLE);}}void USART3_IRQHandler(void){if(USART_GetITStatus(USART3, USART_IT_RXNE) != RESET){USART_ClearITPendingBit(USART3, USART_IT_RXNE);if(Inverter.Length<=17){Inverter.RecvBuf[Inverter.Length]=USART_ReceiveData(USART3);Inverter.Length++;}TIM_Cmd(TIM5, ENABLE);TIM_SetCounter(TIM5,0x0000);}}。
基于STM32的485通讯实验(f103)
基于STM32的485通讯实验(f103)1.前⾔-单⽚机的通讯在单⽚机通讯⽅式多种多样的今天,基本可以划分为两类,即同步和异步通信。
单⽚机要正常交流(即交换数据和读写命令)离不开通讯,单⽚机之间或者单⽚机与及外设之间的通讯都离不开这两类通讯。
通讯⽅式的分类同步和异步通信怎么区别?带时钟同步信号传输的是同步传输,不带时钟同步信号的是异步传输(此时要求通讯双⽅同波特率)。
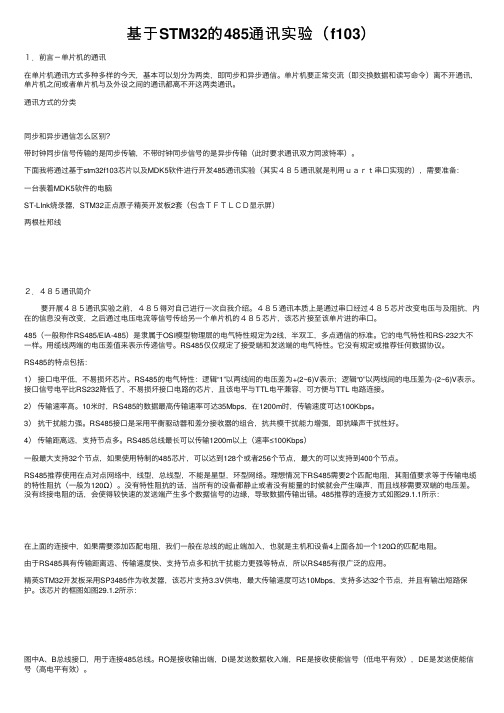
下⾯我将通过基于stm32f103芯⽚以及MDK5软件进⾏开发485通讯实验(其实485通讯就是利⽤uart串⼝实现的),需要准备:⼀台装着MDK5软件的电脑ST-LInk烧录器,STM32正点原⼦精英开发板2套(包含TFTLCD显⽰屏)两根杜邦线2.485通讯简介要开展485通讯实验之前,485得对⾃⼰进⾏⼀次⾃我介绍。
485通讯本质上是通过串⼝经过485芯⽚改变电压与及阻抗,内在的信息没有改变,之后通过电压电流等信号传给另⼀个单⽚机的485芯⽚,该芯⽚接⾄该单⽚进的串⼝。
485(⼀般称作RS485/EIA-485)是⾪属于OSI模型物理层的电⽓特性规定为2线,半双⼯,多点通信的标准。
它的电⽓特性和RS-232⼤不⼀样。
⽤缆线两端的电压差值来表⽰传递信号。
RS485仅仅规定了接受端和发送端的电⽓特性。
它没有规定或推荐任何数据协议。
RS485的特点包括:1)接⼝电平低,不易损坏芯⽚。
RS485的电⽓特性:逻辑“1”以两线间的电压差为+(2~6)V表⽰;逻辑“0”以两线间的电压差为-(2~6)V表⽰。
接⼝信号电平⽐RS232降低了,不易损坏接⼝电路的芯⽚,且该电平与TTL电平兼容,可⽅便与TTL 电路连接。
2)传输速率⾼。
10⽶时,RS485的数据最⾼传输速率可达35Mbps,在1200m时,传输速度可达100Kbps。
3)抗⼲扰能⼒强。
RS485接⼝是采⽤平衡驱动器和差分接收器的组合,抗共模⼲扰能⼒增强,即抗噪声⼲扰性好。
4)传输距离远,⽀持节点多。
stm32 485 信号协议格式

stm32 485 信号协议格式STM32是意法半导体公司推出的一款32位微控制器,广泛应用于工业自动化领域。
其中,STM32 485实现了RS-485通信协议,是一种常用的串行通信协议,适用于长距离通信和多节点通信。
RS-485是电气特性协议,它定义了通信设备之间的电信号行为。
在RS-485协议中,通信设备可以同时工作在主动(发送数据)和被动(接收数据)模式下,适用于两个或多个设备之间的全双工通信。
RS-485支持多达32个设备,每个设备都有一个唯一的地址。
RS-485采用差分信号传输,即发送方将数据以高电平和低电平的形式发送,接收方通过比较两个信号的电平差异来判断接收到的数据。
这样的传输方式使得RS-485具有很强的抗干扰能力,适用于在噪声环境下进行可靠的通信。
对于STM32 485而言,它是集成了RS-485通信功能的STM32微控制器。
具体的信号协议格式如下:1.物理层连接:使用双绞线进行通信,其中A和B线为信号线,D线为数据线,G线为地线。
2.数据帧格式:数据帧由起始位、数据位、奇偶校验位和停止位组成。
起始位和停止位的作用是标识数据帧的开始和结束,数据位是实际传输的数据,奇偶校验位用于检测数据传输过程中的错误。
3.传输速率:RS-485支持多种传输速率,常用的有9600、19200、38400、57600、115200等。
通过STM32的串口配置可以设置传输速率。
4.数据格式:RS-485支持8位数据字节的传输,其中1位为起始位,8位为数据位,1至2位为停止位。
5.控制信号:RS-485中还定义了一些控制信号,包括RTS(请求发送)、CTS(清除发送)、DTR(数据终端就绪)、DSR(数据设备就绪)等。
这些信号可以用于控制数据的发送和接收。
6.通信寻址:RS-485支持多节点通信,每个节点都有一个唯一的地址。
在通信过程中,发送方需要将目标节点的地址包含在数据帧中,接收方根据地址来判断该数据帧是否为自己所需的。
【STM32H7教程】第31章STM32H7的USART应用之RS485
【STM32H7教程】第31章STM32H7的USART应⽤之RS485第31章 STM32H7的USART应⽤之RS485本章教程为⼤家讲解USART应⽤之485总线。
虽然这⼏年⽆线⽹络的使⽤率有所上升,有线的串⾏⽹络仍然提供最有⼒、最可靠的通信,特别是在恶劣的环境中。
在需要抗噪、抗静电、抗电压故障的⼯业,建筑⾃动化领域仍然是有线通信的天下。
31.1 初学者重要提⽰31.2 RS485基础知识31.3 RS485硬件设计31.4 RS485驱动设计31.5 RS485板级⽀持包(bsp_uart_fifo.c)31.6 RS485驱动移植和使⽤31.7 使⽤例程设计框架31.8 实验例程说明(MDK)31.9 实验例程说明(IAR)31.10 总结31.1 初学者重要提⽰1. 学习本章节前,务必优先学习第30章,RS485⽤到的串⼝FIFO也是建⽴在30章的基础上。
2. 了解了本章31.2和31.3⼩节的基础知识后,强烈推荐看此贴的两个⽂档,对RS485讲解的⽐较透彻,中⽂版:。
3. STM32H7⽀持RS485的硬件流控制,即有⼀个专门的引脚来控制485 PHY的收发状态切换。
V7开发板⽤的USART3,需要⽤PD12来控制,⽽这个引脚要⽤于FMC,所以⽤的是⼀个通⽤IO。
4. 经常会有⽹友咨询为什么程序⾥⾯收发切换没有做延迟处理,这⾥就涉及到⼀个关键的知识点TXE发送空中断和TC发送完成中断的区别,详细看教程中说明即可。
31.2 RS485的基础知识背景知识(了解即可)智能仪表是随着80年代初单⽚机技术的成熟⽽发展起来的,现在世界仪表市场基本被智能仪表所垄断。
究其原因就是企业信息化的需要,企业在仪表选型时其中的⼀个必要条件就是要具有联⽹通讯接⼝。
最初是数据模拟信号输出简单过程量,后来仪表接⼝是RS232接⼝,这种接⼝可以实现点对点的通信⽅式,但这种⽅式不能实现联⽹功能。
随后出现的RS485解决了这个问题。
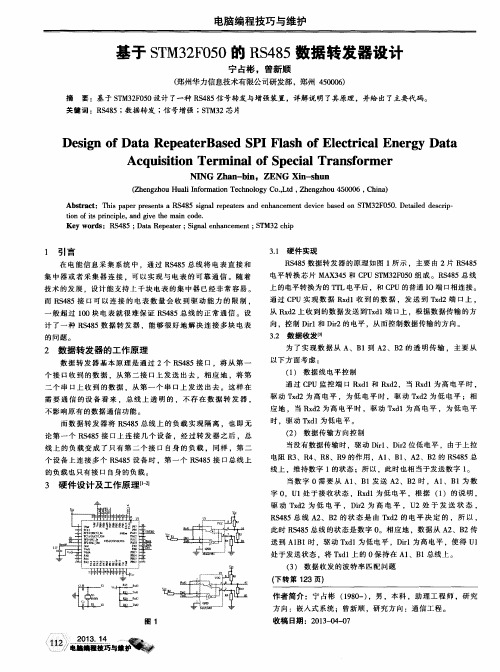
基于STM32F050的RS485数据转发器设计
1 引言
在 电 能 信 息 采 集 系 统 中 ,通 过 R S 4 8 5总 线 将 电表 直 接 和
3 . 1 硬 件 实 现
R S 4 8 5数 据 转 发 器 的 原 理 如 图 1所 示 .主 要 由 2片 R S 4 8 5 电平 转 换 芯 片 MA X 3 4 5和 C P U S T M3 2 F O 5 0组 成 。R S 4 8 5总 线 上 的电 平转 换 为 的 r I T r L电平 后 ,和 C P U 的普 通 1 0端 口相 连 接 。
的负 载 也 只有 接 口 自身 的 负 载 。
( 2 ) 数据传输方 向控制
当没 有 数据 传 输 时 ,驱 动 D i r l 、D i r 2 位 低 电平 , 由于 上 拉
般超过 1 0 0块 电表 就 很 难 保 证 R S 4 8 5总线 的 正 常 通 信 。设
计 了一 种 R S 4 8 5数 据 转 发 器 .能 够 很 好 地 解 决 连 接 多 块 电 表
的问题。
3 . 2 数据收发口 】 为 了实 现 数 据 从 A、B 1到 A 2 、B 2的 透 明 传 输 。主 要 从
以 下方 面考 虑 : ( 1 ) 数 据 线 电平 控 制 通过 C P U监控 端 口 R x d l和 R x d 2 ,当 R x d l 为高 电平时 , 驱动 T x d 2为 高 电 平 ,为 低 电 平 时 ,驱 动 T x d 2为 低 电 平 ;相 应 地 ,当 R x d 2为 高 电平 时 ,驱 动 T x d l为 高 电 平 ,为 低 电 平 时 。驱 动 T x d 1 为低电平。
集 中 器 或 者 采 集 器 连 接 .可 以 实 现 与 电 表 的 可 靠 通 信 。随 着
(7)STM32使用HAL库实现RS485通讯(全双工串口)

(7)STM32使⽤HAL库实现RS485通讯(全双⼯串⼝)⼀、硬件如下图所⽰,485芯⽚链接到单⽚机的USART2上,但是默认的USART2并不是在PD5和PD6上,这⾥是需要重映射的。
另外PG4作为485收发的控制(在485协议中,RE、DE同时为⾼电平那么芯⽚使能发送,如果同时为低电平那么芯⽚使能接收)⼆、软件设计1.软件功能默认485芯⽚是接收功能,每隔1s发送⼀个0x88,如果接收到0x55那么返回0x01,如果接收到的数据不是0x55就返回0x00。
2.CubeMX操作(1)时钟(2)调试注意:这⾥⼀定要选择上,否则会导致Jlink⽆法下载,Cube这⾥默认是不使能的,那么调试引脚就会被配置成普通IO。
(3)usart2(4)重映射(5)配置485芯⽚使能引脚-PG4(6)配置时钟,这个要根据具体的芯⽚与晶振来配置(7)配置串⼝,这⾥默认就⾏(8)配置串⼝中断(9)配置485收发使能引脚PG4默认是接收功能,所以是低电平(10)点击⽣成⼯程3.软件设计(1)根据功能,系统要每⼀秒发送⼀个0x88出去,那么就在main的while(1)循环中填写如下代码:while (1){//将485芯⽚设置为发送模式HAL_GPIO_WritePin(GPIOG, GPIO_PIN_4, GPIO_PIN_SET);TxByte = 0x88;//发送数据HAL_UART_Transmit(&huart2, (uint8_t *)&TxByte, 1, 0xFF);//将485芯⽚设置为接收模式HAL_GPIO_WritePin(GPIOG, GPIO_PIN_4, GPIO_PIN_RESET);HAL_Delay(1000);}(2)如果接收到0x55那么返回0x01,如果接收到的数据不是0x55就返回0x00。
这⾥⽤到中断,写⼀个中断回调函数如下:void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart){if (0x55 == RxByte){TxByte = 0x01;HAL_GPIO_WritePin(GPIOG, GPIO_PIN_4, GPIO_PIN_SET);HAL_UART_Transmit(&huart2, (uint8_t *)&TxByte, 1, 0xFF);}else{TxByte = 0x02;HAL_GPIO_WritePin(GPIOG, GPIO_PIN_4, GPIO_PIN_SET);HAL_UART_Transmit(&huart2, (uint8_t *)&TxByte, 1, 0xFF);}HAL_GPIO_WritePin(GPIOG, GPIO_PIN_4, GPIO_PIN_RESET); //重新使能串⼝接收中断HAL_UART_Receive_IT(&huart2, (uint8_t *)&RxByte, 1);}(3)默认是要使能485接收的,那么串⼝接收中断默认应该也是开启的,所以在main函数的while(1)之前添加上下⾯的代码:HAL_UART_Receive_IT(&huart2, (uint8_t *)&RxByte, 1);齐活,下载验证:。
485通讯使用STM32串口DMA发送数据丢失字节的问题
STM32F10x单片机串口DMA发送485数据问题
开启串口DMA发送数据,使能DMA发送完成中断,实测进入DMA发送完成中断后,有两个字节数据并没有通过串口发送出去;使用485发送数据时,当在DMA发送完成中断中,使能485接收,会造成485传输丢失两个字节;现通过以下方法解决了该问题:
在DMA发送完成中断中,
首先判断串口发送寄存器空标志是否有数据未移入到移位寄存器可用while(!USART_GetFlagStatus( USART2, USART_FLAG_TXE));等待移
入完成;因该标志默认状态下为1,且数据由硬件移入,故不会造成死循环,个人认为;
再判断,串口发送完成标志是否是发送未完成状态,如果为发送未完成,开启发送完成中断;否则,使能485接收(该处未验证不确定);
在串口发送完成中断中,使能485发送。
实测可用;有不合理之处欢迎指教。
stm32 rs485解析程序实例
stm32 rs485解析程序实例在STM32中实现RS485通信,你需要使用UART(通用异步收发器)硬件模块,并配置其RS485模式。
下面是一个简单的RS485解析程序实例,以STM32 HAL库为例。
首先,你需要配置UART并开启RS485模式。
以下是一个示例:```cvoid MX_RS485_UART_Init(void){= USART2;= 115200;= UART_WORDLENGTH_8B;= UART_STOPBITS_1;= UART_PARITY_NONE;= UART_MODE_TX_RX;= UART_HWCONTROL_NONE;= UART_OVERSAMPLING_16;if (HAL_UART_Init(&huart2) != HAL_OK){Error_Handler();}// Enable RS485 mode__HAL_UART_ENABLE_IT(&huart2, UART_IT_REACK); __HAL_UART_DISABLE_IT(&huart2, UART_IT_TEACK); __HAL_UART_ENABLE_IT(&huart2, UART_IT_RWUID); __HAL_UART_ENABLE_IT(&huart2, UART_IT_RXNE); __HAL_UART_ENABLE(&huart2);}```然后,你可以在中断服务程序中处理接收到的数据:```cvoid USART2_IRQHandler(void){HAL_UART_IRQHandler(&huart2);}```在`HAL_UART_IRQHandler`函数中,你可以处理接收到的数据:```cvoid HAL_UART_IRQHandler(UART_HandleTypeDef huart){if(__HAL_UART_GET_FLAG(huart, UART_FLAG_REACK) != RESET) // RS485 Receiver Mode ACK reception{__HAL_UART_CLEAR_FLAG(huart, UART_FLAG_REACK);// Handle received data here...}}```以上代码只是一个基本的示例,你可能需要根据你的实际需求进行修改。
STM32串口实现485双机通信的原理
STM32 串口实现485 双机通信的原理
RS485 通信想必大家都知道,在学习RS232 时,都会拿485(RS485 下文就用485 代替)和其作对比。
485 优缺点不说,网上有。
我用的是STM32 库函数学的485 通信,所以接下来就讲讲STM32 串口实现485 双机通信的原理:
485 和232 都是基于串口的通讯接口,在数据的收发操作上都是一致的。
但是他两的通讯模式却大不相同~!232 是全双工(例:A->B 的同时B->A,瞬时同步)工作模式,而485 是半双工(发时不能收,收时不能发)工作模式。
在232 通信中,主机在发送数据的同时可以收到从机发过来的数据;但在485 通信中,收发要经过模式位的切换来进行,譬如,发送数据时,会把模式为置‘1’,表示为发送模式,此时不能接收;当接收数据时,会把模式位置‘0’,
表示为接收模式,此时不能发送。
在讲STM32 串口实现485 双机通信的原理之前,先来复习一下串口中的中断知识点:。
485通信程序实例

bdata uchar Repeater_Address _at_ 0x26; //中继器地址
sbit RA_0 = Repeater_Address^0;
sbit PaOData4 = PaOData^4;
sbit PaOData5 = PaOData^5;
sbit PaOData6 = PaOData^6;
sbit PaOData7 = PaOData^7;
s; //收到上位机对下位机的广播信号(时间、日期)
sbit Com1Data_Sent = Status2^5; //串口1已发送一字节
sbit tem_bit = Status2^6; //临时位变量
sbit Com1_Finished = Status2^7; //串口1数据已接收完毕
bdata uchar Status3 _at_ 0x22; //中继器状态标志
sbit Alarm_Over = Status3^0; //掉电时下位机侧传来的报警数据结束
sbit RA_7 = Repeater_Address^7;
bdata uchar Repeater_Status _at_ 0x27; //中继器状态标志位
sbit DHead_Arrived = Repeater_Status^0;
uchar data R_P_Data_Buf1 _at_ 0x33; //Com2读数据缓冲区指针1
uchar data W_P_Data_Buf2 _at_ 0x34; //并口写数据缓冲区指针2
uchar data R_P_Data_Buf2 _at_ 0x35; //并口读数据缓冲区指针2
基于STM32与RS485网络的直流电机驱动模块设计

1 . 1 主控 芯片 选择 模 块 主 控 芯 片选 择 S T 公司3 2 位 增 强 型 系列 微 控 制
器S T M3 2 F 1 0 3 C8 T 6 。
收稿 日期:2 0 1 4 -1 0 - 2 0 基金项 目:河北省科学技 术厅基于I E C 6 1 8 5 0 协议的智能化配电系统研制 ( 1 2 2 1 3 5 1 2 D) 作者简介:林丹 ( 1 9 8 7一),女,吉林长岭 人,硕士 ,研究方向为嵌入式系统应用。
功 能均 为 电机 高精 度控 制提 供保 证 。片 上集 成温 度传 感 器 、U S A R T 接 口等 资源 ,大 大 简化 硬 件 设 计 ,系 统 总选 择
双 闭环 控制 参数 易于 调整 ,抗 负载 扰动 及抗 电网 电
制器 核心 设 计具 有高抗 干扰 能 力 的数字 式直 流 电机 驱 动 模块 ;采 用 先进 数字 电流传 感器 及温 度传 感 器实现 故 障 诊 断及保 护 功能 、 电机 精确 控制 及 事后 数据 可靠 分析 ;
D o i :1 0 . 3 9 6 9 / J . i s s n . 1 0 0 9 0 1 3 4 . 2 0 1 5 . 0 3 ( 下) . 2 8
0 引言
随着 控制 科 学、计 算机 科 学、 网络及 通 信技术 的发
控制器基于C o r t e x — M3 内 核 ,最 高 工 作 频 率 可 达 7 2 MH z ,单周 期乘 法 和 自带 硬件 除法 器 ,运 算 能 力 大
换 ,最 终实现 分布 式远 程控 制 。
1 方案设计
模 块 由主控 芯 片 、 电源 电路 、 电流采 样 电路 、编码
) K + ) + e ( n ) ] }
STM32F407VGT6的485通信程序【SP34
【SP3485芯片&xx 接收】本例程为 STM32F4XX (M4 内核)的 485通信程序,采用串口 1 发送和接收 数据,中断接收,将接收到的数据重新发送出去。
主函数文件如下:#include ""/**********************************************************\**名 :**************************************** 工作环境 :RealView MDK-ARM************************************功能:RS485通过串口 1发送,中断接收!将接收到 ***** 的数据通过再次发送出去*********************、************************************************ **********/extern void uart_init(void);extern void USART1_SendByte(u8 Data);extern unsigned char UART1_GetByte(u8 GetData);extern void delay(unsigned int dl);void delay(unsigned int dl){unsigned int i,y; for(i = 0; i < 5000; i++){for(y = 0; y < dl; y++);}static void led_init(void){** 库版本: ********* ** 作者:曾有根 *************************************** 生成日期 :2012- 文件 ********************* 08-03GPIO_InitTypeDef GPIO_InitStructure;/* Enable the GPIO_LED Clock */RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOE, ENABLE);/* Configure the GPIO_LED pin */= GPIO_Pin_7 | GPIO_Pin_8 ;= GPIO_Mode_OUT;= GPIO_OType_PP;= GPIO_PuPd_UP;= GPIO_Speed_50MHz;GPIO_Init(GPIOE, &GPIO_InitStructure);}int main(void){uart_init();led_init();while (1){USART1_SendByte(0x12);GPIO_SetBits(GPIOE, GPIO_Pin_7 ); //LED1 灯闪烁,表示数据发送完成delay(1000);GPIO_ResetBits(GPIOE, GPIO_Pin_7 ); delay(1000);}} 串口配置程序,文件如下:#include "" extern void delay(unsigned int dl);#define TX_485 GPIO_SetBits(GPIOA,GPIO_Pin_8);#define RX_485 GPIO_ResetBits(GPIOA,GPIO_Pin_8); void USART1_SendByte(u8 SendData){TX_485;〃打开发送控制端delay(10);〃延时,这个必须加上,不加会导致数据出错USART_SendData(USART1,SendData);// 发送数据while(USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);// 等待数据发送完成delay(10);RX_485;〃关闭发送控制端unsigned char UART1_GetByte(u8 MidData) {RX_485;〃打开接收控制端delay(10);〃延时,同样必须加上MidData = USART_ReceiveData(USART1);// 接收数据delay(10);TX_485;〃关闭接收控制端return MidData;}void USART1_IRQHandler(u8 GetData){u8 BackData;if(USART_GetlTStatus(USART1, USART_IT_RXNE) != RESE断产生{GetData = UART1_GetByte(BackData);// 直接读取寄存器的数据也行GetData = USART1->DR;USART1_SendByte(GetData);// 发送数据GPIO_SetBits(GPIOE, GPIO_Pin_8 );//LED2 灯闪烁,表示数据接收成功且发送完成delay(1000);GPIO_ResetBits(GPIOE, GPIO_Pin_8 );}}void uart_init(void){USART_InitTypeDef USART_InitStructure;NVIC_InitTypeDef NVIC_InitStructure;GPIO_InitTypeDef GPIO_InitStructure;/* Enable GPIO clock */RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);/* Enable USART clock */RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);/* ConnectUSART pins to A9\10 */GPIO_PinAFConfig(GPIOA, GPIO_PinSource9,GPIO_AF_USART1);GPIO_PinAFConfig(GPIOA, GPIO_PinSource10,GPIO_AF_USART1);/* Configure USART Tx and Rx as alternate function push-pull */= GPI0_Pin_9;/输出TX= GPIO_Speed_50MHz;=GPIO_Mode_AF;/必须为AF,OUT不行= GPIO_OType_PP;= GPIO_PuPd_UP;GPIO_Init(GPIOA, &GPIO_InitStructure);=GPIO_Pin_10;/输入RX=GPIO_Mode_AF;/必须为AF与M3 不同GPIO_Init(GPIOA, &GPIO_InitStructure);= GPIO_Pin_8 ;//485使能端配置= GPIO_Mode_OUT;= GPIO_OType_PP;= GPIO_PuPd_UP;= GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure);= 115200;= USART_WordLength_8b;= USART_StopBits_1;= USART_Parity_No;= USART_HardwareFlowControl_None;= USART_Mode_Rx | USART_Mode_Tx;USART_Init(USART1, &USART_InitStructure);NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1);= USART1_IRQn;= 1;= ENABLE;NVIC_Init(&NVIC_InitStructure);/* Enable USART */USART_Cmd(USART1, ENABLE);USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);USART_ClearFlag(USART1, USART_FLAG_TC);}说明:已经经本人下载至STM32F 4的开发板上成功调试,并且能够正确的收发数据!可供广大奋斗在前线的机油们参考!= 0;。
STM32的RS485通信
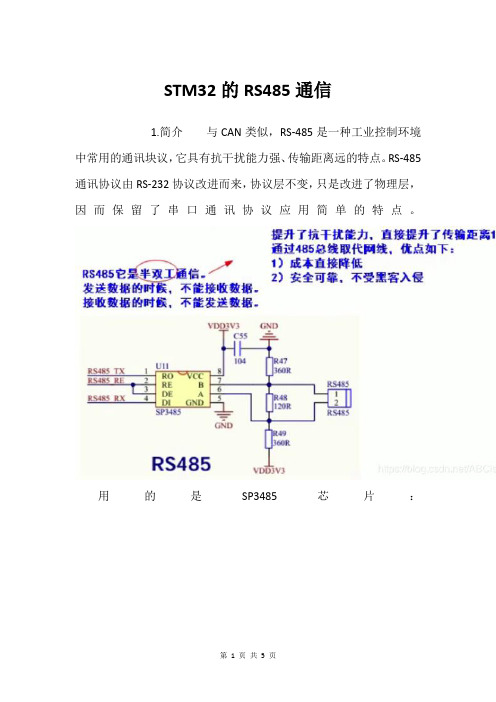
STM32的RS485通信1.简介与CAN类似,RS-485是一种工业控制环境中常用的通讯块议,它具有抗干扰能力强、传输距离远的特点。
RS-485通讯协议由RS-232协议改进而来,协议层不变,只是改进了物理层,因而保留了串口通讯协议应用简单的特点。
用的是SP3485芯片:通信的时候,A端口连接另一个设备的A端口,B端口连接B端口,不是交叉相连。
最多能够连接128个设备,所以在某种情况下可以取代网络,RE引脚用来控制通讯数据的方向,要么进行接收,要么进行发送。
本质还是串口通信RS485_RE为高电平的时候,DE为高电平有效,允许发送数据RS485_RE为低电平的时候,RE为低电平有效,允许接收数据所以当你要发送数据的时候,需要将与RE连接的引脚置为高电平、2.编码所以我们大致可以得到一个程序模板:发送数据函数void rs485_send(uint8_t *pbuf,uint32_t len) { //设置RS458为发送模式,将所连引脚设置高电平输出PGout(2)=1; //调用串口2的库函数发送数据... //延时100us delay_us(100); //设置RS485为接收模式PGout(2)=0;} 接收函数,使用中断接收void USART2_IRQHandler(void) { uint8_t data=0; if(USART2_GetITStatus(USART2,USART_IT_RXNE)!=RESET) data = USART2_ReceiveData(USART2);}下面是演示代码,供参考#include "stm32f4xx.h" #include "stm32f4xx_gpio.h" #include "stm32f4xx_rcc.h" #include "stm32f4xx_usart.h"//模式控制#define RS485_TX_ENPGout(8)//485模式控制.0,接收;1,发送. static GPIO_InitTypeDef GPIO_InitStructure; static USART_InitTypeDef USART_InitStructure; static NVIC_InitTypeDef NVIC_InitStructure;void USART1_Init(uint32_t baud) { RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA,ENABLE); //使能GPIOA时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);//使能USART1时钟//串口1对应引脚复用映射GPIO_PinAFConfig(GPIOA,GPIO_PinSource9,GPIO_AF_USART1);//GPIOA9复用为USART1 GPIO_PinAFConfig(GPIOA,GPIO_PinSource10,GPIO_AF_USART1);//GPIOA10复用为USART1 //USART1端口配置GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9 | GPIO_Pin_10; //GPIOA9与GPIOA10 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;//复用功能GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;//速度50MHz GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽复用输出GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉GPIO_Init(GPIOA, //初始化PA9,PA10//USART1 初始化设置USART_ART_BaudRate = baud;//波特率设置USART_ART_WordLength = USART_WordLength_8b;//字长为8位数据格式USART_ART_StopBits = USART_StopBits_1;//一个停止位USART_ART_Parity = USART_Parity_No;//无奇偶校验位USART_ART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制USART_ART_Mode = USART_Mode_Rx | USART_Mode_Tx;//收发模式USART_Init(USART1, //初始化串口 1 USART_Cmd(USART1, ENABLE); //使能串口 1 USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//开启相关中断//Usart1 NVIC 配置NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;//串口1中断通道NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3;//抢占优先级3 NVIC_InitStructure.NVIC_IRQChannelSubPriority =3;//子优先级3 NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;//IRQ通道使能NVIC_Init(//根据指定的参数初始化VIC寄存器}void USART1_WriteBytes(uint8_t *pbuf,uint32_t len) { uint32_t i =0; for(i=0; iDRUSART1_WriteBytes( } }。
stm32 485 信号协议格式

stm32 485 信号协议格式STM32微控制器与RS485通信协议的结合在工业自动化、数据传输和远程监控等领域有着广泛的应用。
RS485是一种差分信号传输协议,具有远距离、高速率和多节点通信的优势。
当STM32与RS485接口进行通信时,需要设置相应的信号协议格式。
一般而言,STM32使用的RS485信号协议格式为9600-N-8-1,这是一种常见的串口通信协议格式。
下面将详细解释这一格式的含义和设置方法:1. 9600:指的是通信的波特率(Baud Rate),即每秒传输的位数。
9600波特率意味着每秒可以传输9600位数据。
在实际应用中,可以根据通信需求选择不同的波特率,如4800、19200、38400等。
2. N:表示没有校验位(No Parity)。
校验位用于检测数据传输过程中的错误,常见的有奇校验(Odd)和偶校验(Even)。
但在某些情况下,为了提高通信效率,可以选择不使用校验位。
3. 8:表示数据位为8位。
数据位是实际传输的数据的长度,常见的数据位有7位和8位。
在大多数情况下,使用8位数据位可以提供更稳定的数据传输。
4. 1:表示停止位为1位。
停止位用于标识一个字节的结束,常见的停止位有1位、1.5位和2位。
在大多数应用中,使用1位停止位即可满足要求。
在STM32中设置RS485信号协议格式通常涉及以下几个步骤:1. 初始化串口协议:通过调用相关函数(如“HAL_UART_Init()”)来初始化串口协议,设置波特率、数据位、停止位等参数。
2. 配置硬件部分:在初始化函数中调用“HAL_UART_MspInit()”来配置串口的硬件部分,包括引脚配置、中断设置等。
3. 数据传输:使用STM32的串口发送和接收函数来进行数据的传输和接收。
需要注意的是,具体的设置方法可能会因使用的STM32型号和开发环境而有所不同。
因此,在实际应用时,建议参考相关的技术手册和开发指南,以确保正确配置和使用RS485信号协议格式。
modbus报文解析实例
Modbus 报文解析实例:基于 STM32+485 的实现
一、Modbus 协议概述
Modbus 是一种常用的工业控制协议,主要用于自动化控制、数据采集等领域。
Modbus 协议采用主从结构,由主站控制通信,子站只能响应主站的查询请求。
Modbus 协议采用报文通信,报文包括功能码、数据地址、数据长度、校验码等字段。
Modbus 协议的传输介质可以是串口、以太网、485 总线等。
二、STM32+485 实现 Modbus 协议
STM32 是一种常用的微控制器,具有高性能、低功耗、多功能、易扩展等优点。
本文以 STM32+485 为例,详细解析了 Modbus 协议的实现过程。
1.硬件设计
硬件设计主要包括 STM32 单片机、485 总线、收发器、电源等组成部分。
其中,STM32 单片机通过 485 总线与收发器相连,收发器再将信号转换成数字信号,并通过总线传输到其他设备。
2.软件设计
软件设计主要包括串口通信、Modbus 协议解析、485 总线控制等组成部分。
其中,串口通信用于实现单片机与收发器之间的数据传输;Modbus 协议解析用于解析接收到的报文,并进行数据解析和处理;485 总线控制用于控制收发器的传输状态,确保通信的顺利进行。
三、总结
在物联网和互联网的时代,不懂 Modbus 如何玩转物联网?本文
介绍了 Modbus 报文的基本结构和实现方式,并以 STM32+485 为例,详细解析了 Modbus 协议的实现过程。
通过本文,读者可以深入了解Modbus 协议的实现方式,为物联网的开发打下坚实的基础。
STM32(三十九)RS485串口通信

STM32(三⼗九)RS485串⼝通信⼀、概述(1)介绍 RS485接⼝组成的半双⼯⽹络,⼀般是两线制,多采⽤屏蔽双绞线传输,这种接线⽅式为总线式拓扑结构在同⼀总线上最多可以挂接32个结点。
我们知道,最初数据是模拟信号输出简单过程量,后来仪表接⼝是RS232接⼝,这种接⼝可以实现点对点的通信⽅式,但这种⽅式不能实现联⽹功能,随后出现的RS485解决了这个问题。
在RS485通信⽹络中⼀般采⽤的是主从通信⽅式,即⼀个主机带多个从机。
很多情况下,连接RS-485通信链路时只是简单地⽤⼀对双绞线将各个接⼝的“A”、“B”端连接起来,⽽忽略了信号地的连接,这种连接⽅法在许多场合是能正常⼯作的,但却埋下了很⼤的隐患,原因1是共模⼲扰:RS-485接⼝采⽤差分⽅式传输信号⽅式,并不需要相对于某个参照点来检测信号,系统只需检测两线之间的电位差就可以了,但容易忽视了收发器有⼀定的共模电压范围,RS-485收发器共模电压范围为-7到+12V,只有满⾜上述条件,整个⽹络才能正常⼯作;当⽹络线路中共模电压超出此范围时就会影响通信的稳定可靠,甚⾄损坏接⼝;原因⼆是EMI的问题:发送驱动器输出信号中的共模部分需要⼀个返回通路,如没有⼀个低阻的返回通道(信号地),就会以辐射的形式返回源端,整个总线就会像⼀个巨⼤的天线向外辐射电磁波。
(2)电⽓特性逻辑“1”以两线间的电压差为+(2-6)V表⽰;逻辑“0”以两线间的电压差为-(2-6)V表⽰。
接⼝信号电平⽐RS-232-C降低了,就不易损坏接⼝电路的芯⽚,且该电平与TTL电平兼容,可⽅便与TTL电路连接。
RS-485的数据最⾼传输速率为10MbpsRS-485接⼝是采⽤平衡驱动器和差分接收器的组合,抗共模⼲能⼒增强,即抗噪声⼲扰性好。
RS-485接⼝的最⼤传输距离标准值为4000英尺,实际上可达3000⽶,另外RS-232-C接⼝在总线上只允许连接1个收发器,即单站能⼒。
⽽RS-485接⼝在总线上是允许连接多达128个收发器。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
485最基本的半双工通信配置采用STM32F103ZET6串口3连接485芯片通信口,485芯片的A,B通过485转串口模块与电脑相连,完成在串口软件上输入输出功能。
串口3,配置函数:void USART3_Config(void){GPIO_InitTypeDef GPIO_InitStructure;USART_InitTypeDef USART_InitStructure;NVIC_InitTypeDef NVIC_InitStructure;RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB | RCC_APB2Periph_AFIO, ENABLE);RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART3, ENABLE);// USART3_TX -> PB10 , USART3_RX ->PB11GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB, &GPIO_InitStructure);GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB, &GPIO_InitStructure);USART_ART_BaudRate = 115200; // 1200;USART_ART_WordLength = USART_WordLength_8b;USART_ART_StopBits = USART_StopBits_1;USART_ART_Parity = USART_Parity_No; //USART_Parity_Even;USART_ART_HardwareFlowControl = USART_HardwareFlowControl_None;USART_ART_Mode = USART_Mode_Rx | USART_Mode_Tx;USART_Init(USART3, &USART_InitStructure);NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);NVIC_InitStructure.NVIC_IRQChannel = USART3_IRQn;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;NVIC_Init(&NVIC_InitStructure);#ifdef PDU_USART3_DMAUSART_ITConfig(USART3, USART_IT_IDLE, ENABLE);#else// Enable the USART Receive interrupt: this interrupt is generated when the//USART3 receive data register is not empty//USART_ClearITPendingBit(USART3, USART_IT_TC);USART_ClearFlag(USART3,USART_FLAG_TC);USART_ITConfig(USART3, USART_IT_RXNE, ENABLE);USART_ITConfig(USART3, USART_IT_TC, ENABLE);//USART_ITConfig(USART3, USART_IT_TXE, ENABLE);USART_ClearFlag(USART3,USART_FLAG_TC);#endifUSART_Cmd(USART3, ENABLE);USART_ClearFlag(USART3,USART_FLAG_TC);RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOE | RCC_APB2Periph_AFIO, ENABLE);GPIO_InitStructure.GPIO_Pin = GPIO_Pin_15;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOE, &GPIO_InitStructure);RS_485_TX_ENABLE();}PUTCHAR_PROTOTYPE{/* Place your implementation of fputc here *//* e.g. write a character to the USART */USART_SendData(USART3, (uint8_t) ch);//USART_SendData(USART1,(uint8_t)ch);/* Loop until the end of transmission *///while (USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET)while (USART_GetFlagStatus(USART3, USART_FLAG_TXE) == RESET){}return ch;}中断函数:void USART3_IRQHandler(void){if(USART_GetITStatus(USART3, USART_IT_IDLE) != RESET) {USART_ClearITPendingBit(USART3, USART_IT_IDLE);}if(USART_GetFlagStatus(USART3, USART_FLAG_RXNE)!=RESET) {USART_ClearFlag(USART3,USART_FLAG_RXNE);TIM3_Init(1000, 7200);BLUE_ON();if(cnt>=32){cnt=0;}else{data[cnt]=USART_ReceiveData(USART3);cnt++;}}if ((USART_GetITStatus(USART3, USART_IT_TC) != RESET) ||(USART_GetITStatus(USART3, USART_IT_TXE) != RESET) ){USART_ClearITPendingBit(USART3, USART_IT_TC);USART_ClearITPendingBit(USART3, USART_IT_TXE);// USART_SendData(USART3, 0XFFFF);}}void TIM3_IRQHandler(void){if (TIM_GetITStatus(TIM3, TIM_IT_Update) != RESET) {TIM_ClearITPendingBit(TIM3, TIM_IT_Update);TIM3_DeInit();BLUE_OFF();// printf("\r\n %x",cnt);cnt=0;}}static void NVIC_TIM3Configuration(void){NVIC_InitTypeDef NVIC_InitStructure;/* Set the Vector Table base address at 0x08000000 *///NVIC_SetVectorTable(NVIC_VectTab_FLASH, 0x0000);/* Enable the TIM3 gloabal Interrupt */NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;NVIC_Init(&NVIC_InitStructure);}定时器:void TIM3_Init(uint16_t tcon, uint16_t psc){TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;// TIM3 clock enableRCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);// reset timerTIM_DeInit(TIM3);// Time base configuration// value to reloadTIM_TimeBaseStructure.TIM_Period = (tcon - 1);// pre-scaler value against system clockTIM_TimeBaseStructure.TIM_Prescaler = (psc - 1);// scaler value against system clockTIM_TimeBaseStructure.TIM_ClockDivision = 0;// counting modeTIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;// init timerTIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure);// Clear TIM3 update pending flagTIM_ClearITPendingBit(TIM3, TIM_IT_Update);// TIM IT enable of over-countingTIM_ITConfig(TIM3, TIM_IT_Update, ENABLE);// config timer's interruption functionNVIC_TIM3Configuration();// Enable TIM3 counterTIM_Cmd(TIM3, ENABLE);}void TIM3_DeInit(void){// Disable TIM3 counterTIM_Cmd(TIM3, DISABLE);// Reset timerTIM_DeInit(TIM3);// Disable TIM3 clockRCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, DISABLE);//tim3_stat = 0x00;}主函数:#ifdef __GNF__#ifdef __GNUC__/* With GCC/RAISONANCE, small printf (option LD Linker->Libraries->Small printf set to 'Yes') calls __io_putchar() */#define PUTCHAR_PROTOTYPE int __io_putchar(int ch)#else#define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)#endif /* __GNUC__ */#endif /* __GNF__ */void Delay(uint32_t tick){while(tick--);}/* Private function prototypes -----------------------------------------------*/extern unsigned char data[size];extern volatile unsigned char cnt;/************************************************************************** ****** Function Name : main* Description : Main program* Input : None* Output : None* Return : None* Attention : None*************************************************************************** ****/int main(void){/*USART configuration*/USART3_Config();RED_ON();BLUE_ON();GREEN_ON();Delay(100000);BLUE_OFF();RED_OFF();GREEN_OFF();/* Infinite loop */while (1){uint8_t i=0;RS_485_TX_ENABLE();printf("\r\n up up day! ");for(i=0;i<50;i++){GREEN_ON();Delay(500000);GREEN_OFF();Delay(500000);}RS_485_RX_ENABLE();while(data[0]==0x00){RED_ON();Delay(500000);RED_OFF();Delay(500000);}memset(data,0,size);}}。