焊接机器人及其柔性夹具控制系统.
工业机器人柔性夹具实际应用与展望

社科研究17作者简介:聂波(1982.9— ),男,汉族,湖北咸宁人,硕士。
主要研究方向:机电一体化、工业机器人。
课题项目:一种多功能工业机器人末端执行器的设计研究(项目编号:2019B002)。
现代制造业的先进性是传统工业生产的集成化、自动化越来越普遍。
工业机器人主要应用于航空、汽车等高附加值、高附加值行业。
随着计算机系统、数控加工和柔性制造技术的不断改进,工业机器人的成本逐渐降低。
因此,工业机器人逐渐应用于各种传统产品行业,附加值并不一定高。
然而,铜川通用工业机械端部夹具无法满足市场对个性化产品生产的巨大需求,传统的专用夹具也不适合,因此柔性夹具成为解决这一明显弊端的必然途径。
柔性夹具是指同一夹具在改变工件形状和尺寸后,调整参数后仍能适应变化。
柔性夹具在数控加工中具有多品种少数量的特点,值得学习。
一、柔性夹具元件柔性夹具是一套具有不同形状、尺寸和功能的预制构件和组合件。
在精加工中能较好地保证工件的定位基准和加工农业表面的定位精度。
它还可以保证夹具能使刀具根据数控和加工中心机床工作面的要求尽可能接近加工台,甚至所有加工面都能减少机床的停机时间。
在加工中,一次夹多种物件进行依次加工。
它可以缩短夹具、刀具和工件系统的调整时间,减少刀具更换次数和刀具调整时间,更好地发挥数控机床和加工中心机床的高效性能。
柔性夹具元件可通过组装、使用、拆卸和重新组装等方式重复使用。
二、工业机器人柔性夹具的发展根据工业发展要求,设计制造了基于组合夹具的柔性夹具。
柔性夹具的特点是:统一的零件规格、多功能的零件性能、简单的零件结构、模块化、夹紧工件的快速自动化、可调的重用、微机化的装配管理。
高强度、高刚度、高精度,为了提高劳动生产率,缩短工件加工时间,工件加工朝着高速化、人性化的切削量方向发展,工艺高度集中。
工件定位夹紧后,依次完成铣、钻、锉等多工序加工。
切削力的大小和方向不断变化,这就要求柔性夹具本身具有较高的使用强度和刚度,以满足工件的加工精度。
基于PLC的焊接机器人柔性控制系统

作 站 的 控 制 采 用 三菱 Q 系 P C L ,机 器 人 本 体 采 用
F N CR 3i A U 一 0 .焊 接 控 制 器 博 世 B S 2 0 O 6 0 ,触 摸 屏 采
用西 门子 T 2 0 ( 以直 接设定 数据 ,比如数据 寄存 P7 可
器 、I 等 , 而 且 报 警 信 息 ) 这 样 ,在 触 摸 屏 上 阅 读 信 息 ,一 目 了然 ,简 化 。
了操 作 。
装 配 的必 然 发 展 方 向 ,要 求 发 展 生 产 周 期 短 、加 工 成 本 低 、产 品 质 量 高 的柔 性 装 备 系 统 。焊 接 机 器 人 具 有 焊 缝 轨 迹 重 复 性 好 、焊 接 质 量 稳 定 性 高 等 优 点 ,已 经 广 泛应 用 于 汽 车 、工 程 机 械 、通用 机 械 和 兵 器 工 业 等 领 域[1 是 在 大 型 焊 接结 构 生 产 应 用 中 仍 存 在 着 4。但 , 5 许 多 问 题 ,需 要 进 一 步 提 高 机 器 人 控 制 系 统 的 柔 性
作 为 机 器 人 的 核 心 部 分 ,控 制 系 统 是 影 响 机 器 人 性 能 的关 键 部分 之一 , 它从 一 定 程 度 上 影 响 着 机 器 人 的 发 展 ,对 于 不 同结 构 的 机 器 人 ,控 制 系 统 的 设 计 方 案 也 不 同 。本 研 究 主要 研 究 焊 接 机 器 人 控 制 系 统 的设
Ke r :rb t PLC;c nr ls se wedng y wo ds o o ; o to y tm; li
1 引 言
自从 16 9 0年 初 第 一 台 工 业 机 器 人 问 世 至 今 ,机
器 人 技 术 得 到 了迅 猛 发 展 。随 着 机 器 人 技 术 的 日趋 成
川崎点焊机器人介绍

川崎焊接机器人系统 介绍
基本轴1种,手腕轴1种 优异的轴的密封性
手腕容许转矩大
容许惯性力矩大 标准叉车搬运孔, 安装便利
※机器人本体规格
2.控制柜(E控制柜)
外部构造
2.控制柜(E控制柜)续
内部构造
※川崎焊接机器人应用事例
川崎点焊机器人辅助设备
1.集成管道
标准配置Z系列机器人
装配集成管道后的Z系列机器人
1.1.集成管道外形
1.2.配管线缆示例
1 1 1 5 2 3 7 4 5 7 6 6 6 1.焊接线缆 (4AWG/ 3pairs, OD- 17mm) 2.伺服焊枪电机线缆 (OD-10 mm) 3.伺服焊枪编码器线缆 (OD-10 mm) 4.焊枪温度检测线 2根 (OD-11 mm) 5.信号线 2根 (OD-8.9mm) 6.冷却水回流管 3根 (OD-12mm/ID-8mm) 7.冷却水流通管 3根 (OD-12mm/ID-8mm)
用多台带空气焊枪的机器人进行点焊. 空气焊枪系统
加压冲击力大
由于加压冲击力大,需对工件使用坚 固的,大型的夹具进行固定.
夹具的种类繁多,导致现场环境复杂.
伺服焊枪系统 使用伺服焊枪 ・降低了加压冲击力 ・高精度定位
电极磨耗修正
软着陆
夹具简单化
无需均衡器
伺服焊枪 与 空气焊枪 打点工作对比视频
焊枪设计流程
焊接机器人在不锈钢车体制造中应用[论文]
![焊接机器人在不锈钢车体制造中应用[论文]](https://img.taocdn.com/s3/m/36b4bffcba0d4a7302763a62.png)
焊接机器人在不锈钢车体制造中的应用【摘要】由于机器人制造具有柔性化、智能化程度高的特点,焊接机器人是国际上面向21世纪的先进制造技术。
本文分析了焊接机器人在b型地铁不锈钢车体制造中的应用情况,综述了不锈钢车体厂房的工艺布局,焊接机器人的基本原理与构成,焊接机器人的本体技术,机器人编程技术。
【关键词】电阻焊工业机器人焊钳不锈钢车体由于轨道车辆不锈钢车体与汽车车体存在的差异,轨道车辆车体更长,更宽,更高,对工件及工装夹具的精度要求更高。
工业机器人在轨道交通行业中的应用还属于刚刚起步阶段,技术还不完全成熟。
在国内也仅有长春,青岛等车辆厂具有相对完善工业机器人不锈钢车体生产线。
城轨车辆不锈钢车体由梁、柱、板等各种型材上千个组成,焊点上万个,其中95%均为电阻点焊。
点焊所产生的有毒气体,金属飞溅致使工作环境恶劣。
特殊部位喉深达到1650mm大型焊钳的应用。
如果手动操作的话,给工人带来不便增加了劳动强度。
焊接机器人的应用不仅使工人远离有毒烟尘和飞溅,而且不需搬运笨重的c型焊钳,把工人从繁重的体力劳动中解放出来,充分做到以人为本,深刻理解科学发展观,把科学发展践行到实际的经济生产中。
1 天津公司焊接机器人生产线介绍中国北车天津工业园内的车体车间规划成具有完整生产能力的不锈钢车体生产线,可以满足各类不锈钢轨道车辆车体的制造。
此生产线包括端墙,侧墙,车顶,底架及车体总组成台位,是一条现代化程度高的流水线式生产线,各大部件在不同台位间有序流转,大大提高了生产效率,符合现代精益化生产的要求。
2 焊接机器人系统构成及工作原理焊接机器人是高度柔性化加工系统,主要由以下几大部分组成:1.机器人本体。
2.机器人控制柜。
3.焊钳。
4.焊接逆变器。
5.焊接监控单元。
6.空压机。
7.水冷机等。
车体车间所采用的焊接机器人均采用示教再现(teaching-playing)的编程控制方法。
示教方式有手把手示教(walk-through)和示教盒示教(lead-through)两种。
PLC在弧焊机器人控制系统中的应用
PLC在弧焊机器人控制系统中的应用闫海兰【摘要】弧焊机器人在现代制造业中的应用越来越广泛,且发挥着不可替代的作用.开发功能全面、开放性强、可靠性高的弧焊机器人控制系统至关重要.在分析和研究了国内外工业机器人控制系统的基础上,搭建了新型的弧焊机器人控制系统.整个系统由西门子315-2 DP PLC控制,机器人与PLC间通过PROFIBUS-DP总线通讯,机器人与焊机通过Devicenet总线通讯.焊接实验表明:该系统具有可靠性高、柔性好以及长期运转稳定性强等特点.【期刊名称】《兰州石化职业技术学院学报》【年(卷),期】2018(018)002【总页数】4页(P23-26)【关键词】弧焊机器人;315-2DPPLC;人机界面;控制系统【作者】闫海兰【作者单位】兰州石化职业技术学院电子电气工程学院,甘肃兰州 730060【正文语种】中文【中图分类】TP242.2目前,工业机器人逐渐成为现代制造业必备的自动化设备,越来越广泛的应用于摩托车、汽车、电子信息、工程机械、化工和家电等行业。
主要用途为搬运、码垛、加工、喷漆和焊接等。
其中,焊接机器人是在工业机器人的基础上发展起来的先进焊接设备,已占机器人投入使用量的45%以上[1,2] 。
按焊接方式的不同,焊接机器人大致可以分为点焊机器人、弧焊机器人和激光焊机器人。
近年来,尤其弧焊机器人以其能保证焊接作业的高效率和高稳定性等优点被普遍应用于焊接制造中。
然而,在实际的焊接生成中,如装配和加工上的误差会造成焊缝尺寸和位置的变化,焊接条件的变化会使熔透不均或焊道变形。
为了克服机器人焊接过程中各种不确定因素对焊接质量的影响,提高长期作业的可靠性、稳定性和柔性,而且还能实现焊接参数的在线检测、调整和焊缝质量的实时控制[3,4]。
利用计算机进行实时监测和控制时,普通的工业PC机在此环境下抗干扰能力较差。
而PLC电压范围宽、抗干扰能力强、适应环境温度范围广,在焊接环境下不需要采取特殊电源隔离和屏蔽措施。
基于PLC的焊接机器人控制系统设计
基于PLC的焊接机器人控制系统设计扬州大学广陵学院本科生毕业设计毕业设计题目基于PLC的焊接机器人控制系统设计学生姓名专业班级指导教师完成日期摘要焊接机器人作为工业机器人应用的一个重要领域,对提高企业的工作效率、提升产品质量、降低企业的生产成本等方面都有着非常重要的意义。
根据焊接机器人的控制需要,设计了基于PLC的焊接机器人控制系统。
焊接机器人控制系统是焊接机器人的核心部分,它是机器人控制柜和主控制柜以及夹具操作台之间通讯的桥梁,它可控制伺服的启动、暂停、旋转速度等,从而控制夹具翻转;可控制机器人和夹具之间的联动,使焊接动作能够自动的运行,并且能实现任意的暂停再启动和紧急停止再启动。
系统经过调试,联系焊接样件可知,本课题所设计的控制系统能良好的运行,适应各种环境干扰,能够较为准确的沿着示教的轨迹进行焊接,而且焊接质量达到了产品的质量要求。
关键字:焊接机器人、控制系统、PLC、伺服控制AbstractWelding robot as an important field of industrial robot applications, to improve the efficiency of enterprises, improve product quality, reduce the production cost of enterprises have a very important significance. According to the control of welding robot, designed a welding robot control system based on PLC. Welding robot control system is the core part of the welding robot, it is a bridge of communication between the robot control cabinet and main control cabinet and the jig operation platform, it can control servo motor start, pause, such as rotation speed, so as to control the fixture turnover; can control the robot and the linkage between the clamp, welding operation can be run automatically, and can realize any pause and restart and emergency stop and restart. The system after the debugging, the contact welding sample, control system designed by this paper can run in good, adapt to various environment interference, can accurately along the teaching track welding, and welding quality meets the quality requirement of products.Key words:Welding robot、control system、PLC、servo control目录第一章绪论 (1)1.1 引言 (1)1.2 焊接机器人的国内外研究现状 (1)1.3选题背景和意义 (2)1.4课题的主要研究内容 (3)第二章焊接机器人 (4)2.1 焊接机器人的组成 (4)2.2 焊接机器人的分类 (4)2.3 焊接机器人的常用控制方式 (7)2.4 焊接机器人的应用 (8)2.5 焊接机器人的发展趋势 (9)第三章控制系统 (10)3.1 伺服控制系统 (10)3.1.1 伺服控制系统的概述 (10)3.1.2 伺服控制系统的机构组成 (10)3.1.3 伺服控制系统的技术要求 (11)3.2 PLC控制系统 (11)3.2.1 PLC控制系统的概述及其特点 (11)3.2.2 PLC的基本结构及其分类 (13)3.2.3 PLC的型号选择 (20)3.2.4 PLC的性能指标与发展趋势 (24)3.2.5国内外PLC产品简介 (26)第四章硬件电路的设计 (28)4.1 PLC的选取 (28)4.2元器件的选择 (33)4.2.1断路器的选择 (33)4.2.2继电器的选择 (34)4.2.3 交流接触器的选取 (35)4.3 PLC的主控柜接线图 (37)第五章软件设计 (38)5.1 I/O的分配 (38)5.2 触摸屏的设计 (40)5.2.1 HMI的概述 (40)5.2.2 触摸屏画面的设计 (42)5.3 伺服控制 (47)5.4梯形图 (49)5.4.1程序梯形图见附录 (53)第六章系统安装与调试 (54)6.1引言 (54)6.2 焊接机器人的系统安装于调试 (54)6.2.1 焊接机器人的系统安装 (54)6.2.2 焊接机器人的调试 (54)6.3 机器人焊接实验 (55)6.3.1 焊接机器人的焊接实验 (55)6.3.2 焊接机器人实验及其结果分析 (58)6.4 小结 (59)第七章总结 (60)参考文献 (61)致谢 (62)第一章绪论1.1 引言焊接时一种将材料永久连接起来,成为具有给定功能的结构的制造技术。
塞拉门弧焊机器人柔性工作站夹具与变位机设计

由此可产 生显著 的社会效 益 和经济效 益 。 在从 事塞拉 门铝镁 硅合金 框架 弧焊机 器人柔 性 工
作 站 的研 发过程 中 ,夹 具 与变位机 在弧焊 机器人 工作 站中发挥 着重要 作用 ,很 多机 器人柔 性工作 站设 计 的 成 败均取 决于此 。
焊接机 器人柔性 工作站总体 平面简 图如 图1 所
城 市地 铁 、高 速列车 的迅猛 发展使 得塞 拉 门需 求
焊 接 方 法 :TG焊 或 MI ;焊缝 拼 条 :5 8 I G焊 ~ 条/
门 ;焊 缝 形式 :角接 或对 接 焊缝 ;焊缝 条 数 :5 ~ 5 O 8 条/面 ・ ) ( 门 ;焊 缝平 均长度 :l ~ 0mm。 0 4
图2 示 的焊 接夹 具 布 置 图 中 。考 虑 到 l 多 种规 所 O
格 门框 的尺寸 结构差 异 。外 围的夹具 相对 于工作 台安
装轴 心 线呈 对 称结 构 分布 。内部 的2 夹具 分 布 于轴 个
中 的应 用 。焊接 生 产 的柔 性 化 越 来越 引起 人 们 的重
线两 侧 。但 不完 全对 称 。
器 人 自动 焊接 、人工 下料 3 工 序 ,从 而 实 现上 下料 个
级换代 的关键 。
同类 产 品国外造价 过高 ,研 发铝镁 硅 弧焊机 器人 柔 性工 作站 可使 国产塞 拉 门产 品逐步 走 入 国 内市 场 ,
与 焊 接 时 间 的 重 叠 ,达 到既 经 济 可 行 ,又保 质高 效
维普资讯
We ig e h o g o. o1 F b 2 0 l n c nl y V 1 7 N . e . 0 8 d T o 3
・ 焊接 设 备 与 材 料 ・ 3 1
焊接机器人控制系统

焊接机器人运动控制系统作为焊接机器人的用户,为正确选择、合理使用并做到能常规维护焊接机器人,必须对焊接机器人的运动控制系统有一定层次的了解。
1.对机器人运动控制系统的一般要求机器人控制系统是机器人的重要组成部分,主要用于对机器人运动的控制,以完成特定的工作任务,其基本功能如下:1.1 记忆功能:存储作业顺序、运动路径、运动方式、运动速度和与生产工艺有关的信息。
1.2 示教功能:离线编程、在线示教、间接示教。
在线示教包括示教盒和导引示教两种。
1.3 与外围设备联系功能:输入和输出接口、通信接口、网络接口、同步接口。
1.4 坐标设置功能:有关节坐标系、绝对坐标系、工具坐标系和用户自定义四种坐标系。
1.5 人机接口:示教盒、操作面板、显示屏。
1.6 传感器接口:位置检测、视觉、触觉、力觉等。
1.7 位置伺服功能:机器人多轴联动、运动控制、速度和加速度控制、动态补偿等。
1.8 故障诊断安全保护功能:运行时系统状态监视、故障状态下的安全保护和故障自诊断。
2 焊接机器人运动控制系统(硬件)的组成焊接机器人运动控制系统中的硬件(图4)一般包括:2.1 控制计算机。
控制系统的调度指挥机构。
一般为微型机,其微处理器有32位、64位等,如奔腾系列CPU以及其他类型CPU;2.2 示教盒。
示教焊接机器人的工作轨迹和参数设定,以及所有人机交互操作。
示教盒拥有自己独立的CPU以及存储单元,与主计算机之间以串行通信方式实现人机信息交互; 2.3 操作面板。
由各种操作按键、状态指示灯构成,只完成基本功能操作;2.4 硬盘和软盘存储器。
存储焊接机器人工作程序以及各种焊接工艺参数数据库的外围存储器;2.5 数字和模拟量输入输出。
各种状态和控制命令的输入或输出。
2.6 打印机接口。
记录需要输出的各种信息。
2.7 传感器接口。
用于信息的自动检测,实现机器人柔顺控制,一般为力觉、触觉和视觉传感器。
对一般的点焊或弧焊机器人来说,控制系统中并不设置力觉、触觉和视觉传感器。
基于PLC的机器人自动焊接设备控制系统的设计与研究
基于PLC的机器人自动焊接设备控制系统的设计与研究程明权;秋钰洁;江鸣;龚盈
【期刊名称】《自动化应用》
【年(卷),期】2024(65)6
【摘要】基于欧姆龙NJ-501系列PLC、电装6轴机器人,构建了机器人自动焊接设备控制系统。
在只使用6轴机器人控制柜标配的32个I/O端口的情况下,采用了一种I/O组合通信的方法,解决了机器人自动焊接设备控制系统的PLC与6轴机器人之间存在的通信问题,满足了设备的控制需求,并最终批量上线生产。
经过总结并验证,该I/O组合通信方法已推广应用到撕膜机、收料机等其他自动化设备。
【总页数】3页(P75-77)
【作者】程明权;秋钰洁;江鸣;龚盈
【作者单位】宁德新能源科技有限公司
【正文语种】中文
【中图分类】TP271.4
【相关文献】
1.基于PLC的发热电缆线芯自动焊接设备控制系统设计
2.基于PLC的双工位自动焊接设备控制系统设计研究
3.基于S7-1200PLC的机器人自动分拣控制系统设计
4.基于S7-1200PLC的机器人自动上下料控制系统的设计
5.基于PLC和ABB机器人的自动码垛生产线控制系统设计
因版权原因,仅展示原文概要,查看原文内容请购买。
焊接工程基础
16、号料:是用放样所取得的样板或样杆,在原材料或经粗加工的坯料上划下料 线、加工线、检查线及各种位置线的工艺过程。 17、边缘加工:边缘加工是将工件的边缘或端面加工成符合工艺要求的形状和尺 寸精度的加工工序。 18、定位:定位就是将待装配的零件按图样的要求保持正确的相对位置的方法。 19、夹紧:夹紧就是借助于外力使零件准确到位,并将定位后的零件固定。 20、测量:测量是指在装配过程中对零件间的相对位置和各部尺寸进行一系列的 技术测量,以衡量定位的准确性和夹紧的效果,以指导装配工作。 21、定位器:定位器是将待装配零件在装焊夹具中固定在正确位置的器具,亦可 称定位元件。 22、随装随焊:即先将若干个零件组装起来,随之焊接相应的焊缝,然后再装配 若干个零件,再进行焊接,直至全部零件装完并焊完,成为符合要求的构件。 23、分部件装配:将结构件分解成若干个部件,先由零件装配焊接成部件,然后 再由部件装配焊接成结构件。 24、焊接变位机械:是改变焊件、焊机或焊工空间位置来完成机械化、自动化焊 接的各种机械装备。 25、焊接中心:主要由焊接电源、焊机或机头、焊机变位机、焊件变位机、焊接 辅助装置、焊缝自教跟踪和焊丝干伸长自动调节装置,以及它们的综合电气控制 系统等组成。 26、焊接机器人:焊接机器人是机器人与现代焊接技术相结合的,是自动化焊装 生产线中的基本单元,并常和其他设备一起组成机器人柔性作业系统 ,如弧焊机 器人工作站。 27、压力容器:压力容器是容器的一种,是指最高工作压力 p≥0.1MPa ,容积 V ≥25L,工作介质为气体、液化气体或最高工作温度高于或等于标准沸点液体的 容器。 28、全面质量管理:全面质量管理就是由企业全体人员参加的、用全面工作质量 去保证生产全过程质量的管理括动。 29、未熔合:在焊接过程中,焊道与母材间、焊道间金属未完全熔化的现象, 称 为未熔合,也称为“假焊” 。 30、自燃:可燃物质受热升温而不需要明火的作用就能自行着火的现象称自燃。 1、 简述焊接结构生产的特点? 1) 以焊接为主要生产工艺内容的生产加工过程 2) 焊接结构的基本材料是各种金属材料; 3)对轧制的、具有一定断面的金属材料 进一步加工和应用;4)大都用于大型工业生产装备、储运设备的制造;5)需大 型加工设备;6)焊接结构的生产过程是一个具有多种工艺内容的综合性生产加 工过程。 2、在制造重要结构和压力容器施焊前必须进行焊接工艺评定凡有下列情况之一 者,施焊前必须进行焊接工艺评定。1)施焊单位首次焊接的钢种,或钢材类别号 改变时。 2)改变焊接方法时。 3)改变焊接材料时,如改变焊条、焊丝的类型;改 变焊剂的类型或成分;改变填充材料的化学成分等。4)改变焊接坡口形式或焊接 程序时。 5)改变焊前预热温度或层间温度 6)改变焊后热处理规范参数时。 3、简述为了实现气割应满足哪些条件? 1)钢材的气割过程主要是嫩烧过程,所 以金属在氧气中的燃点应低于熔点, 这是保证气割进行的基本条 2)燃烧后形成的 金属氧化物的熔点应低于金属的熔点,且流动性好,粘度要小,便于高压氧气流 从割缝中将其吹掉 3)金属燃烧时应能放出大量的热, 以预热下层金属是实现连续 切割的条件。4)金属应有较低的热导率,否则热量散失较快,切口处温度降低, 低于金属的熔点,使切割无法继续进行。5)金属中含有阻碍气割过程进行和增大 金属淬硬性的成分及杂质要少。 4、简述桥式起重机箱形工艺流程。由于箱形主梁是一个封闭式结构,所以必须 先焊梁内的长、短肋板,然后再焊翼板。具体焊接顺序如下:1)先焊接上翼板与 长、短肋板间的焊缝,以免产生主梁的扭曲变形,造成矫形困难。2)装两侧腹板, 焊接Π形梁的内部焊缝, 两条较长的纵向焊缝暂不焊接。 3)装配下翼板后焊接上、 下翼板的纵向角焊缝,应先焊下翼板与腹板间的两条纵向角焊缝,要求两面对称 同时进行焊接,以减小焊接变形。若下翼板装配后上拱度超过工艺规定,可以先 焊上翼板的两条纵向角焊缝。 填空:Q 进行焊接结构定位、夹紧和测量三个基本条件。 Q 设计夹紧装置时, 必 须满足的基本要求有:正、牢、快、简。Q 从功能角度分析可将机器人分解成四 个部分:操作机、 末端执行器、 传感器系统和控制器。 Q 压力容器是容器的一种, 是指最高工作压力 p≥0.1MPa ,容积 V≥25LQ 全面质量管理的工作内容主要包 括设计试制过程的质量管理、制造过程的质量管理和使用过程的质量管理等 Q 选用焊接材料时,应遵循等同性能、改善性能和改善焊接性三原则。Q 焊接生产 过程中主要接触到的污染有:弧光辐射、有毒气体、粉尘、高频电磁场、射线和 噪声等六类。Q 在焊接电弧的高温主要有臭氧、氮氧化物、一氧化碳和氟化氢。 Q 燃烧是有条件的,它必须在可燃物质、助燃物质和火源这三个 Q 手弧焊用的 电焊机空载电压限制在 90 V 以下。
三维柔性焊接平台的工艺
三维柔性焊接平台的工艺概述三维柔性焊接平台是一种三维自由度机器人系统,它能实现大范围灵活运动,并能针对复杂工件进行自适应控制,满足压接/焊接等工艺需求。
本篇文章将对三维柔性焊接平台的工艺进行探讨,包括系统结构、自适应控制技术、并行控制等方面。
系统结构三维柔性焊接平台主要由控制系统、机器人系统、测量系统、安装系统等部分组成。
其中,控制系统主要负责控制机器人的运动状态、位置、速度等参数,测量系统用于实时监测机器人的运动情况,调整机器人运动轨迹,安装系统为机器人设立固定点,实现运动的精度和稳定性。
自适应控制技术三维柔性焊接平台的自适应控制技术主要包括力控制和视觉控制两部分。
力控制是指机器人系统针对工件的力学特性,通过控制机器人的力量来保持均衡,达到压接/焊接等操作的效果。
视觉控制则是机器人系统通过视觉传感器获取工件的状态,实时调整机器人的运动轨迹并保证精度,从而实现对工件的精细加工。
并行控制三维柔性焊接平台的并行控制是指通过将多个独立机器人协调起来,实现大范围灵活运动。
在实际操作中,每个机器人担任不同的任务,通过协同作业完成工件的加工。
这种方式可以大幅提高工作效率,同时增加系统的可靠性和鲁棒性。
工艺优化在实际应用中,三维柔性焊接平台的工艺也需要进行优化,以满足不同工件的加工需求。
对于焊接工艺来说,最为重要的是焊接参数的选择,包括焊接电流、焊接速度、焊接压力等。
此外,材料的选择、设备的维护等方面也需要充分考虑,以实现最佳焊接效果。
结论三维柔性焊接平台是现代制造业中的重要设备之一,它能够灵活适应不同工件的加工需求,具有广阔的应用前景。
通过对工艺的分析和优化,可以进一步提高设备的性能和效率,为工业生产带来更加可靠、精准的服务。
焊接机器人的运动控制系统设计与实现

焊接机器人的运动控制系统设计与实现随着现代工业的发展,焊接机器人的应用越来越广泛,成为工业自动化生产的重要组成部分。
焊接机器人的运动控制系统设计和实现是焊接机器人技术的核心,影响着焊接机器人的性能和使用效果。
本文将从焊接机器人的运动控制系统设计和实现这一重要方面,进行详细的阐述。
一、焊接机器人的运动控制系统概述焊接机器人通常由机械手臂、控制器和焊接装置等组成。
其运动控制系统主要包括位置控制、速度控制和力控制三大部分。
其中,位置控制是指控制机器人末端执行器的位置;速度控制是指控制机器人末端执行器的速度;力控制是指控制机器人末端执行器施加在工件上的力。
焊接机器人的运动控制系统设计和实现是通过控制器来完成的。
控制器负责解决机器人的运动路径规划、运动轨迹控制以及运动过程中出现的干扰问题等。
在运动控制系统中,还需要根据焊接需求来设计相应的控制策略,以保证焊接质量,提高焊接效率。
二、焊接机器人的运动控制系统设计方案在焊接机器人的运动控制系统设计中,需要考虑以下几个方面:1. 焊接机器人的末端执行器设计末端执行器是指连接焊接机器人末端的操作工具,通常由焊钳或焊枪等组成。
末端执行器的设计需要考虑焊接工件的形状、尺寸及重量等因素,并进行适当的优化以提高焊接效果和质量。
通常,末端执行器的设计需要与焊接机器人的运动系统、力控制系统紧密结合,以确保末端执行器能够稳定、精准地对焊接工件进行焊接。
2. 焊接机器人的运动系统设计焊接机器人的运动系统是指焊接机器人的机械手臂及其各类传动装置。
运动系统的设计需要考虑机械器件的刚度、精度及稳定性等因素,以确保机器人能够准确地运动到预定位置,并能够稳定地进行焊接操作。
3. 焊接机器人的控制器设计控制器是焊接机器人运动控制系统的核心,负责焊接机器人的运动控制和装置状态的监测。
焊接机器人的控制器需要根据焊接工艺的需求来设计相应的控制算法,并采用先进的控制器硬件平台来保证焊接机器人的稳定性和可靠性。
机器人焊接自动线技术标准
机器人焊接自动线技术标准随着科技的快速发展,机器人技术已经深入到各行各业,其中,焊接领域尤其引人注目。
机器人焊接自动线技术以其高效、精准、稳定的特点,正在改变着传统的焊接方式。
本文将详细介绍机器人焊接自动线技术的标准。
机器人焊接自动线通常由机器人本体、焊接设备、夹具、控制系统等组成。
其中,机器人本体是焊接自动线的核心,其精度和稳定性直接影响到焊接质量。
焊接设备包括焊枪、焊丝等,是完成焊接任务的关键部件。
夹具用于固定待焊接工件,保证焊接过程中工件的位置精度。
控制系统则是整个自动线的灵魂,它通过对机器人本体和其他设备的精确控制,实现整个焊接过程。
机器人焊接自动线的精度和稳定性是评价其性能的重要指标。
一般来说,六轴工业机器人的精度在1mm左右,重复定位精度在05mm以内。
对于需要更高精度的场合,可以考虑使用更先进的机器人技术,如双臂协同机器人(Cobots)或者并联结构机器人(Parallel Structures Robots)。
焊接设备包括焊枪、焊丝等,其质量和性能对焊接结果有着重要影响。
在选择焊接设备时,要重点其功率、效率、稳定性等参数。
同时,对于不同的材料和厚度,需要选择合适的焊枪和焊丝。
夹具是保证工件位置精度的关键设备,其设计和制造精度直接影响到焊接质量。
夹具的设计应考虑工件的形状、大小、重量等因素,同时要保证装夹方便、定位准确。
制造夹具的材料应选择耐磨、耐高温的材料,如硬质合金、陶瓷等。
控制系统是机器人焊接自动线的核心,其软硬件性能直接影响到整个系统的稳定性和精度。
控制系统的硬件应选择高性能的处理器和可靠的执行器,同时要保证电源供应的稳定性。
软件方面,要采用成熟稳定的控制算法和优化策略,保证对机器人本体和其他设备的精确控制。
安全性是任何工业生产线的基础要求,对于机器人焊接自动线尤为重要。
生产线应设计成全封闭式,以防止操作人员接触危险区域。
还需定期对生产线进行安全检查和维护,确保所有设备都处于安全状态。
焊接自动化设备的控制系统设计与实现
焊接自动化设备的控制系统设计与实现随着科技的不断发展,各行各业也迎来了自动化的时代。
焊接自动化设备作为一项重要的制造工具,在工业生产中也被广泛应用。
与此同时,焊接自动化设备的控制系统也发生了较大的变化。
本文将从设计与实现的角度对焊接自动化设备的控制系统进行探讨。
一、控制系统的设计1.1 系统概述控制系统是用于控制焊接自动化设备的核心设备。
该控制系统包括硬件和软件两部分。
其中硬件包括主控板、输入输出模块、传感器、执行器等;软件则是对这些硬件进行控制的程序。
1.2 系统组成焊接自动化设备控制系统的组成包括三个方面:(1)输入部分:输入部分主要是对焊接自动化设备进行数据采集。
其中包括压力传感器、温度传感器、气流传感器等。
(2)处理部分:处理部分是对输入数据进行处理以得出相应控制指令的部分。
其中包括主控板、运算器等。
(3)输出部分:输出部分主要是将控制指令传递给执行器,控制焊接自动化设备完成相应工作的部分。
其中包括电机、步进电机等驱动执行器的设备。
1.2 系统工作流程焊接自动化设备控制系统的工作流程包括数据采集、数据处理及执行器响应三个环节。
具体流程如下:(1)采集环节:此环节通过传感器采集焊接自动化设备的各种数据信号,包括电气信号、机械信号、气动信号等。
(2)处理环节:此环节将采集到的各种数据信号进行处理,得到相应的控制指令,并把这些指令传递给执行器。
(3)执行器响应环节:此环节接收控制指令,对焊接自动化设备进行相应的操作,完成整个流程。
这一环节同时也是测试环节,用于检验控制系统的性能是否满足设计要求。
二、控制系统的实现2.1 系统设计原则在设计焊接自动化设备控制系统的时候,应该遵循以下原则:(1)高可靠性:焊接自动化设备是在生产线中长时间作业,为了确保工作的安全性,控制系统必须拥有高可靠性。
(2)高效性:对于焊接自动化设备的控制系统来说,高效性十分关键。
控制系统需要在较短时间内完成数据采集、处理并输出控制信号,确保设备正常运转。
焊接机器人控制系统设计王艳刘晓兰金月_1

焊接机器人控制系统设计王艳刘晓兰金月发布时间:2021-11-22T07:00:13.486Z 来源:基层建设2021年第25期作者:王艳刘晓兰金月[导读] 随着自动化技术和信息化技术的快速发展哈尔滨华德学院 150025摘要:随着自动化技术和信息化技术的快速发展,汽车制造领域中智能化、柔性化及精益化方面得到迅速提升,得益于焊接机器人在汽车制造中发挥重要作用。
本文以西门子 S7-300PLC 为核心控制器,以西门子 TP1200 触摸屏为 HMI 界面对设备运行进行监控和操作,实现 ABB 工业焊接机器人的有效控制。
文中围绕控制系统软件设计、硬件选型及 HMI 界面设计完成 ABB 工业焊接机器人的精确、稳定控制,提升了汽车制造焊接工作效率、确保了焊接质量的稳定性、降低了人工劳动强度,对焊接机器人控制系统设计具有一定的实践意义。
关键词:ABB 机器人;焊接;S7-300PLC;HMI引言随着“工业 4.0”和“中国制造 2025”的提出和快速推进,智能化制造、柔性化制造及精益化制造成为制造领域的主要发展趋势。
在汽车生产制造过程中,白车身焊接过程会产生大量的烟尘、火花、飞溅,不仅会影响车身焊接质量和生产效率,而且会对现场工作人员身体健康造成一定的伤害,为提升汽车生产制造效率和焊接质量稳定性,我国多数整车制造基地引进 ABB 机器人应用于冲压、焊装、喷涂等各个环节,以提高汽车制造的自动化水平,保证汽车制造质量,同时降低汽车制造员工的工作强度及改善工作环境。
基于 PLC 的汽车自动焊接控制系统是运用 PLC作为核心控制器,以触摸屏+PC 站为人机操作界面对 ABB工业焊接 Robot(机器人)进行操作及远程监控,以提升白车身焊接质量和工作效率。
作为汽车制造焊接相关技术人员,进行积极有效的探究白车身焊接工业 Robot 控制系统设计,以保证白车身焊接质量的不断提升具有较高的实践意义。
1 白车身焊接控制系统设计思路ABB 焊接 Robot 是具有较高自动控制水平的焊接操作机,能够重复多次进行设计编程,通常用于 3 个以上的编程的轴,通过其安装在管线包里面的通讯、动力电缆及控制系统的通信,实现主计算机及轴计算机对 Robot 的控制。
焊接机器人

点焊机器人一、点焊机器人概述点焊机器人的典型应用领域是汽车工业。
一般装配每台汽车车体大约需要完成 3000 —4000 个焊点,而其中的 60 %是由机器人完成的。
在有些大批量汽车生产线上,服役的机器人台数甚至高达 150 台。
汽车工业引入机器人已取得了下述明显效益:(1)改善多品种混流生产的柔性;(2)提高焊接质量;(3)提高生产率;把工人从恶劣的作业环境中解放出来。
最初,点焊机器人只用于增强焊点作业 ( 往已拼接好的工件上增加焊点 ) 。
后来,为了保样,点焊机器人逐渐被要求具有更全的作业性能。
具体来说点焊机器人优点:(1)安装面积小,工作空间大。
(2)快速完成小节距的多点定位 ( 例如每 0.3~ 0.4s 移动 30 ~50mm 节距后定位 )。
(3)定位精度高( ±0.25mm),以确保焊接质量。
(4)持重大 (300 ~ 1000N),以便携带内装变压器的焊钳。
(5)示教简单,节省工时;安全可靠性好。
二、点焊机器人系统的基本构成点焊机器人虽然有多种结构形式,但大体上都可以分为 3 大组成部分,即机器人本体、控制系统以及由阻焊变压器、焊钳、点焊控制器和水、电、气路等组成的焊接系统。
点焊机器人本体主要指其机械部分。
机械部分通常由机体、臂、手腕和焊钳(末端执行器)组成。
关节式机器人的前三个自由度,即机体腰轴的回转,肩(大臂和机体连接处)轴的仰俯和肘(大臂和小臂连接处)轴的屈伸可把焊钳送到一定的空间位置;后三个自由度,即售完的三个关节运动使焊钳以一定的角度(姿态)对准焊点。
点焊机器人的控制系统由本体控制部分及焊接控制部分组成。
本体控制部分主要实现示教在线、焊点位置及精度控制。
点焊作业一般可采用点位控制,又称点到点控制(point to point 简写为PTP),它仅考虑原始点和目标点的位置,而不考虑经由何途径到达目标点,即点焊时只要求点击到达焊点位置准确,重复定位精度为正负0.2—0.4mm,而对电极运动轨迹并无严格要求。
汽车座椅骨架自动焊接系统的设计
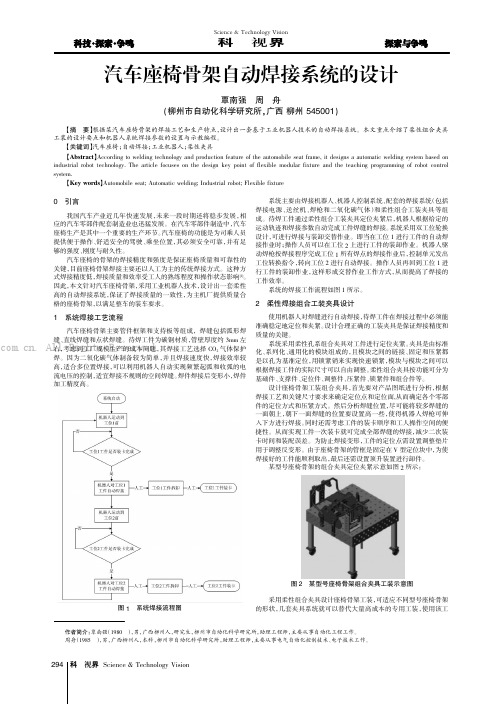
Science &Technology Vision科技视界汽车座椅骨架自动焊接系统的设计覃南强周舟(柳州市自动化科学研究所,广西柳州545001)【摘要】根据某汽车座椅骨架的焊接工艺和生产特点,设计出一套基于工业机器人技术的自动焊接系统。
本文重点介绍了柔性组合夹具工装的设计要点和机器人系统焊接参数的设置与示教编程。
【关键词】汽车座椅;自动焊接;工业机器人;柔性夹具【Abstract 】According to welding technology and production feature of the automobile seat frame,it designs a automatic welding system based on industrial robot technology.The article focuses on the design key point of flexible modular fixture and the teaching programming of robot control system.【Key words 】Automobile seat;Automatic welding;Industrial robot;Flexible fixture0引言我国汽车产业近几年快速发展,未来一段时期还将稳步发展,相应的汽车零部件配套制造业也迅猛发展。
在汽车零部件制造中,汽车座椅生产是其中一个重要的生产环节。
汽车座椅的功能是为司乘人员提供便于操作、舒适安全的驾驶、乘坐位置,其必须安全可靠,并有足够的强度、刚度与耐久性。
汽车座椅的骨架的焊接精度和强度是保证座椅质量和可靠性的关键,目前座椅骨架焊接主要还以人工为主的传统焊接方式。
这种方式焊接精度低,焊接质量和效率受工人的熟练程度和操作状态影响[1]。
因此,本文针对汽车座椅骨架,采用工业机器人技术,设计出一套柔性高的自动焊接系统,保证了焊接质量的一致性,为主机厂提供质量合格的座椅骨架,以满足整车的装车要求。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
焊接机器人及柔性夹具控制系统焊接机器人及柔性夹具控制系统在结构上主要由两部分组成:机械系统和控制系统。
机械系统包括机器人工作房、机器人本体、机器人外轴回转台及机器人周边设备等;控制系统可分为机器人控制系统、工装夹具识别及控制系统、人机界面等辅助单元。
机械结构1.机器人工作房机器人工作房的布置及主要部件如图1所示,工作房外形为六边梯形,房间由方管框架加薄铁板焊接而成,焊接机器人在房间中央位置,左右对称位置各有一个工作台,分别由两个机器人外轴电机直接驱动。
两工作台之间有30°左右的夹角,机器人工作时可在两工位之间切换,即机器人在左侧工位焊接时,操作工可在右侧工位上下料,同样,当机器人在右侧工位工作时,操作工可在左侧装拆工件,这样可使机器人停机等待时间大大减少,从而提高生产效率。
在机器人和回转台之间有气缸驱动的隔离装置,它可以遮挡弧焊时产生的弧光和焊渣,并保护操作者在另一侧操作时不受影响。
在两工位外侧开了两个门,以便操作,该门上方安装了气动门帘,焊接时可自动关上,以遮挡弧光和焊渣。
图1 机器人工作房顶视图两工位外侧分别有一个双手启动操作盒,用以操作焊接夹具盒启动机器人进行焊接工作。
在整个工作房的前侧有一个主操作面板,上面安装了触摸屏和若干按钮,在此可以对系统进行设置和操作。
机器人工作房的外观如图2所示。
图2 机器人工作房图2.机器人本体我们采用的FANUC ROBOWELD 100i系列焊接机器人是标准的六轴机器人,具有六个自由度,理论上可以达到运动范围内的任意一点,其臂展范围为1440mm,配以松下的焊枪,足以满足本系统的需要。
另外,汽车零部件的焊接对机器人轨迹的重复定位精度有一定要求,一般应小于0.5mm,而该机器人可达到0.2mm,可以满足生产需要。
此外,整车厂商对及时供货和零库存的要求决定了零部件厂商对生产效率的关注,所以对设备的自动化程度和零件生产节拍有近乎苛刻的要求,FANUC机器人2000mm/s的直线速度可以大大减少机器人轨迹中空行程所浪费的时间。
机器人本体外形如图3所示。
图3 机器人本体3.机器人外轴回转台外轴回转台由支架、驱动电机、减速器和回转框架等构成,焊接夹具就固定在该框架上。
回转由机器人外轴直接控制,除去了以往由PLC控制的转台单独回转、位置确认以及与机器人通信等过程所增加的许多时间。
由于该回转台主动侧和从动侧之间的跨度较大(1800mm),而且在工作时转速又很高,因此对回转台在回转时的跳动范围是有一定要求的,需认真调校才能使回转台在工作时运转平稳,否则很容易引起电机过载、过热等情况,严重时将损坏设备。
4.机器人周边设备机器人焊接时还需要用到其他辅助设备来使生产顺利进行,并减少停机时间、降低设备故障率、提高安全性等,所以,该机器人工作房中还安装了一些周边设备,如焊丝剪切装置、喷硅油装置、焊枪清洗装置、光电保护装置、焊丝管平衡吊空装置等。
控制系统该机器人工作房的控制系统可分为主控系统和机器人控制系统两个层次,其总体结构如图4所示。
图4 控制系统结构简图1.主控系统主控系统采用OMRON CQM1H系列中小型PLC,该机种采用非机架结构的模块拼装方式,从左向右分别由电源模块PM、CPU模块、功能模块、输入输出模块及终端盖板组成。
根据应用系统的不同,用户可以选择相应的模块来组成所需的控制系。
由于CQM1H系列PLC的模块种类丰富,功能齐全,几乎可以适应控制系统的各种需求,由其组成的系统也具有相当的柔性化程度。
本控制系统采用的模块及其功能如下:电源模块PA206:提供稳定的直流工作电源给各模块使用。
CPU模块CQM1H-CPU51:这是整个系统的核心部分,支持最大数量为512点的I/O;支持OMRON 特殊指令如PID控制、浮点数运算、宏指令、脉冲指令等;支持Compobus/S和AS接口的多种主从网络模块;支持OMRON最新版编程软件CXP3.1;程序容量最大可达15.2K;内建16点直流12~24V 的输入点。
将编制好的程序下载运行后可维持系统的自动运行。
该模块提供一个RS232端口,和两个内装板插槽,RS232端口可以和其他串口设备进行通讯,该系统中纳入的一个触摸屏TP,就是通过CPU 上自带的RS232串口进行通讯的;内装板插槽上最多可以安装两块特殊功能卡,由于本系统无特殊功能需求,所以该槽上是空着的。
网络主模块CQM1-SRM21-V1:系统采用OMRON Compobus/S网络结构,可以大大减少现场接线工作量,并有效延长连接电缆的使用寿命,增加可靠性。
机器人工作房内两个回转台上各安装一块远程从模块,通过网络电缆和主模块进行通信,交换信息(I/O状态刷新)。
从模块为16点的远程输入模块,其中低8位分配给该工位夹具上的气缸检测夹紧和松开状态使用,高八位分配给系统用于识别夹具编号,进而设定和储存夹具控制信息,然后系统可以根据此信息来对不同夹具进行相应控制。
I/O输入输出模块:输入模块用于接收机器人工作房中各按钮、传感器等信号,输出模块用于控制各种执行器件,如气缸、电机、机器人等根据工艺要求进行动作,满足生产和安全的需要。
机器人的控制由主控系统通过与机器人控制器之间的I/O信号交换来实现。
2.机器人控制系统机器人控制系统由机器人控制器、外轴控制器、焊机等构成;在控制属性上,机器人控制系统是下层,是被控制的对象,它受上层主控系统的指挥和调用,处于被动地位。
机器人控制器由电源模块、CPU、伺服控制单元、输入输出模块、焊机接口模块等组成,用以控制机器人本体的自如运动,控制方法为程序示教和再现法,这是通过连接于控制器上的TP (Teach-Pandent示教器) 来实现的。
外轴控制器它是机器人控制器的扩展,内含一个伺服放大模块,可以同时控制两个外轴的运动。
由于这两个外轴是机器人控制器的一部分,所以它们可以在机器人本体移动的同时进行转动,从而将焊接轨迹中通常需要由外轴单独回转的时间节约下来,提高了焊接效率。
焊机控制器用于控制弧焊时的规范,如电流、电压、焊丝的送给、焊接保护气体通断等,对焊接质量的控制起关键作用。
关键控制方法研究客户要求中关键及难点在于:多套夹具能在一套系统中共存,夹具的更换时间不应超过五分钟,新制夹具加入系统时,无需改动PLC程序,做到自动识别和控制(即所谓的柔性控制),且系统中的夹具可扩展容量不应小于100台/套。
1.夹具控制字的形成(1) 控制对象特点主要控制对象为夹具上的气缸,每套夹具上的气缸数量可能不一样,但总数不超过4组,每组气缸使用一个三位五通电磁阀,这样每套夹具有2x4=8个输出点控制电磁阀动作,有两个工位总共16个输出点;同时为了检测气缸的夹紧或松开状态,每组气缸配有两个传感器(干簧管磁性开关),每套夹具2x4=8点输入;鉴于夹具识别的需要,另分配8点输入用于以两进制识别不同夹具,这样每个工位上的16点远程输入模块正好用足,且夹具最大可扩展数量为20+21+…+26+27=28=256,理论上两工位有2x256=512套夹具容量,已足够。
(2) 控制特征夹具上四组气缸分别称为第1、2、3、4组,在控制上的特征是:夹紧时的顺序为1号夹紧,1号夹紧到位后2号夹紧,依此类推,全部气缸都夹紧后启动机器人进行焊接作业;待机器人焊接完成后气缸逐次松开,通常的顺序与夹紧时相反。
根据夹具制造时的使用要求和工件焊接工艺的不同,有些夹具气缸数量可能少于四;有些气缸的夹紧或松开位置可能不必要进行检测等情况,设想在程序数据区中开辟若干存储区间,分别用于存放该套夹具上的每组气缸实际是否存在,每组气缸的传感器是否需要检测等信息。
(3) 数据储存方式为了适应更多的情况,每类信息分别形成数据后在相邻的数据区储存,每套夹具包含的信息暂定为3类:气缸使用字、夹紧检测字、松开检测字,再加上1个备用字,故夹具控制字长度为四个字;该信息可存放于以夹具编号作为索引间接寻址的数据区内,当需要控制时可由系统将夹具信息再次寻址调出,按固定格式对夹具气缸进行控制,具体内容见表1:表1 夹具控制字结构2.夹具自动识别的实现(1) 硬件组成主要依赖夹具接线盒中的识别芯片,该芯片其实只是一块小线路板,装了一块8位DIP拨码开关,通过二进制方式来表明该夹具的编号,每套夹具上都安装了一个接线盒,通过这种方式从硬件上来实现对夹具的编码,既简单也实用,且容易实现。
(2) 软件实现PLC程序上,每次程序循环中都对远程模块上对应于夹具编号的输入点进行扫描,并放入暂存区,同时与记忆区中的夹具编号进行比较。
如果两者相同,则表明该工位上的夹具状态正常,无需任何动作;如果不同,则提示夹具编号变化,需操作员确认,此时又分为两种情况:①有新夹具换上工作台,且系统已经正确识别出新放入的夹具的编号,那么操作员需要在触摸屏上确认该夹具编号的正确性。
如果放上的夹具以前从未在该系统中使用过,则需对该夹具的控制字进行正确设置后写入PLC数据区;如果该夹具曾经在本系统中使用过至少一次,即数据区中保留有该夹具号对应的控制信息,那么操作员在确认夹具编号后,该夹具的控制信息会由系统以间接寻址方式自动调用出来,并显示在触摸屏上,确认无误,即可开始生产。
②由于硬件故障(连线断裂、网络故障等)造成自动识别出的夹具编号与实际不符时,(识别出错)可通过强行写入正确夹具编号的方式来让系统进入正常工作模式进行生产,待完成任务后再进行维修等操作,以缓解生产压力。
综合①②两点可知,夹具识别流程如图5:图5 夹具识别流程图3.多夹具系统气缸柔性控制根据夹具控制特点,各气缸由电磁阀控制,按工艺要求进行先后动作,编制程序如图6:图6 夹具夹紧流程梯形图在程序条“0”中,200通道为夹紧流程控制字,需要夹紧时将1写入200通道,则200.00位成为一号气缸夹紧动作标志位;条“1”中,HR40.00为根据间接寻址查表得到的该夹具控制字中一号气缸的启用标志,如果该标志为1,则在200.00位为1的条件下,右侧的输出201.00为ON,此时一号气缸夹紧电磁阀通电,产生气缸夹紧动作;当程序检测到该气缸夹紧后,一号夹紧标志位HR65.00为ON,所以输出200.01为ON,并自保,同时切断201.00的通路,使201.00为OFF,一号气缸夹紧电磁阀断电,不再动作,此时一号气缸夹紧动作完成;当然,如果一号气缸的启用标志HR40.00为0,则201.00始终为OFF,同时由于HR40.00的非并与一号气缸夹紧指示标志位下方,故程序直接接通200.01为ON,进行下一步动作。
与一号气缸夹紧过程完全类似,当所有气缸都夹紧后,进入夹紧控制流程的结束控制位,当该位为ON后,程序将对通道清零,至此夹具的夹紧控制已告完成。
以上编程方法,可触类旁通,再编写出夹具松开流程的控制程序,然后分别做出两工位各自的夹具夹紧和松开程序,那么这部分的功能就算完全实现了。