石油化工安全仪表系统设计规范内容
石油化工仪表供气设计规范简介

石油化工仪表供气设计规范简介石油化工仪表供气设计规范简介引言:石油化工行业是一个复杂而庞大的领域,其中仪表供气设计起到至关重要的作用。
仪表供气设计规范旨在指导相关工程师在设备选择、设计和安装过程中遵循的标准和规范。
本文将介绍石油化工仪表供气设计规范的基本原则、要求和流程。
通过深入探讨关键概念和技术,帮助读者对该规范有更全面、深入和灵活的理解。
正文:一、基本原则1. 安全性:仪表供气设计必须符合国家和地方的安全法规以及石油化工行业的相关标准。
保证供气系统的安全操作是最重要的原则之一。
2. 可靠性:仪表供气系统必须具备良好的可靠性,以确保在生产过程中持续和稳定地提供所需的气体。
3. 经济性:仪表供气系统的设计应考虑成本效益,努力实现在技术可行的范围内,用最低的成本满足生产要求。
二、要求1. 设备选择:根据工艺要求和气体流量,选择适当的仪表设备,包括流量计、压力计、温度计和液位计等。
2. 管道设计:合理设计供气管道,考虑气体流速、压力损失和泄漏等因素。
管道应使用适当的材料和连接方式,确保供气系统的稳定和可靠。
3. 阀门和阀组选择:选择符合流程要求的阀门和阀组,以便调节和控制气体流量、压力和温度。
4. 进气系统设计:合理设计进气系统,确保气体的质量和纯度。
包括过滤、除湿和去除杂质等处理设备的选型和配置。
5. 安全系统:为供气系统设计必要的安全设备和紧急阀门,以应对突发情况和意外事件。
三、流程1. 设计前准备:明确工艺要求、气体性质和流量要求等基本参数,进行前期调研和准备工作。
2. 设备选择:根据前期准备的参数和要求,选择适当的仪表设备。
3. 管道设计:绘制供气管道的平面布置图,计算泵站和管道的压力损失,确定合适的管径和材料。
4. 阀门和阀组选择:根据需求选择合适的阀门和阀组,考虑流量调节和控制的需要。
5. 进气系统设计:根据气体性质和纯度要求,选择适当的进气处理设备,并合理配置。
6. 安全系统设计:根据安全要求,设计必要的安全设备和紧急阀门,并合理布置。
《石油化工仪表系统防雷设计规范》

《石油化工仪表系统防雷设计规范》
《石油化工仪表系统防雷设计规范》主要针对石油化工企业相关仪表系统,提出了针对防雷设计要求,具体要求如下:
一、仪表系统的参数
1. 建立仪表系统的参数表,其中应包括仪表功能、工作特性及电气参数等;
2. 按照相关安全规定设置设备保护水平,以确保安全操作;
3. 根据功能特点,确定与仪表系统有关的所有信号和设备插座的防雷要求;
二、雷击保护措施
1. 在石油化工仪表系统的安装地点设置放电装置,放电装置的性能必须满足《济南市低压电器认证验收标准》的相关要求;
2. 根据安装地点区域,确定合理的接地要求,并配备专用的接地装置,连接合理可靠;
3. 在仪表系统的进线端安装相应的进线保护器,并确保性能合格;
4. 对潜在危险的仪表插座要采取必要的防雷措施,可搭配保险裤以防雷电击入;
三、保护设备操作要求
1. 安装设备时必须遵守《石油化工仪表系统设计规范》、《安全技术制度》以及其他有关安全规范;
2. 外电缆接线要紧固牢固,设备接地极安全有效,连接可靠并平坦光洁;
3. 各保护器的线路连接要牢固,不能采用电抗材料连接;
4. 各防雷装置要定期维护,相关记录和操作要按照《电工安全技术操作规程》的规定实施;
四、系统测试检查
1. 对石油化工仪表系统的所有电气元件有责任人员进行测试和检查;
2. 检查放电装置的电流接头是否符合装置标准要求;
3. 检查仪表系统的各种仪器及插座的接线是否牢固,是否有明显的热源或异常情况;
4. 检查进线保护器的送供电系统和控制系统的联结情况,故障回路是否结实;
5. 合理检查及维修各层级的安全联锁装置,确保可靠性。
石油化工安全仪表系统设计规范
石油化工安全仪表系统设计规范
石油化工安全仪表系统设计规范是石油化工行业安全监控,运行及操
作的基本原则。
它不仅保障石油化工行业的正常开展,而且也丰富了
行业研究和开发,提高了行业效率。
一、安全仪表系统设计原则
1、设备安装、调试和测试应符合有关产品国家相关标准及国家质量、
安全和环保标准。
2、系统应确保正常报警功能。
3、系统应拥有安全报警预警功能,及时预警用户风险状况,进而采取
必要的预防措施。
4、系统应具有适当的火焰非同步控制功能,以检测非同步噪声和正常
的运行条件。
5、系统应拥有适当的电力负荷检测功能,可以检测石油化工设备电气
负荷情况,以免发生安全事故。
二、安全仪表系统设计标准
1、安全仪表系统设计采用有认证的安全仪表,其通过 EMC 认证才能
投入使用。
2、安全仪表系统所有涉及的安全设备和系统的设计,安装,检查,测试,检修等应符合国家规定。
3、安全仪表系统设计应根据实际情况,完整地考虑系统的结构,控制,保护,记录,数据管理,安装及使用等方面的要求,使仪表系统具有
准确,可靠,安全,高效的特点。
4、安全仪表系统使用范围应根据实际工况环境选择合适的技术参数和
功能性能等,以保证系统可靠性、安全性和高性能要求。
石油化工安全仪表的系统设计规范,既可以保障石油化工行业的正常开展,也丰富了行业研究和开发,提高了行业效率,同时也为现代社会的正常存在和发展提供了保障。
只有当符合上述规范的安全仪表系统被设计和使用,才能使石油化工行业安全生产,经济繁荣。
1217石化行业仪表安装设计规范
石化行业仪表安装设计规范石油化工中仪表具有监测,预警及指示等功能,安装不当不仅会影响整个工程的正常运行,严重时会发生化工事故,威胁化工人生命安全。
接下来带大家熟悉一下石化行业仪表安装规范,为大家提供一个安装参考。
一般规定1现场仪表的安装位置应满足以下要求:1、易于接近、观察及操作,必要时设置专用的操作平台和梯子。
2、避开高温、强烈振动的场所。
3、避开静电干扰和电磁干扰,当无法避开时,应采取适当的抗静电干扰、电磁干扰的措施。
4、具有适应现场环境的防护措施。
5、非防水仪表设在室外时,应安装于仪表保护箱内。
6、非防爆仪表用于爆炸危险场所时,应安装于正压式仪表柜内或采取其它防爆措施,并符合有关防爆规范要求。
2仪表与工艺过程的连接应满足以下要求:1、工艺管道上或设备上的仪表连接头 (管嘴) 、法兰及仪表引压管道的材质和压力等级不应低于工艺管道或设备上连接件的材质和压力等级。
2、除设计另有规定外,仪表测量用介质引压管道的连接法兰最低公称压力,应符合下列规定:a)A级管道法兰的公称压力,不宜低于5. 0MPa;b)B、C 级管道法兰的公称压力,不宜低于2.0MPa;3、设计压力不大于0. 6M Pa的蒸汽、空气和水管道,其法兰的公称压力,不宜低于1. OM Pae4、除设计另有规定外,法兰密封用垫片应符合下列规定:a)一般公称压力低于5. OM Pa的法兰可采用石棉橡胶板垫片或聚四氟乙烯包覆垫片;b)剧毒,可燃介质或温度高、温差大、受机械振动或压力脉动的管道宜采用缠绕式垫片,并符合表1的使用条件:表1 缠绕式垫片使用条件c)高温、高压管道宜采用金属环垫,其材质应满足介质防腐要求及法兰硬度要求。
5、法兰紧固件材料选用应符合表2的规定。
表2 常用紧固件材料注: ①斜线上方为螺柱或螺检材料,斜线下方为螺母材杆;②软质垫片系指予紧比压y≤31MPa, 垫片系数M≤2的垫片。
具有更高Y和M的垫片均属非软质垫片.6、仪表连接头 (管嘴) 的长度应根据工艺管道或设备的隔热层厚度确定。
《石油化工安全仪表系统设计规范》解读
c h e mi c a l e n gi n e e r i n g” a r e b r i e f l y i n t r o d u c e d . Th e a c t i v i t i e s a n d d e s i g n p r i n c i p l e s o f s a f e t y
ma i n t e n a n c e . Th e d e s i g n p r i n c i p l e s o f s a f e t y i n s t r u me n t e d s y s t e m s e n s o r ,f i n a l e l e me n t ,l o g i c
Hu a n g Bu y u ,F a n Zo n g h a i ,M a L e i
( S i n o p e c E n g i n e e r i n g I n c o r p o r a t i o n ,B e i j i n g , 1 0 0 1 0 1 , C h i n a )
e n g i n e e r i n g d e s i g n , i n t e g r a t i o n, c o mm i s s i o n i n g a n d a c c e p t a n c e t e s t , o p e r a t i o n a n d
石油化工安全仪表设计规范-GB_T50770-2013
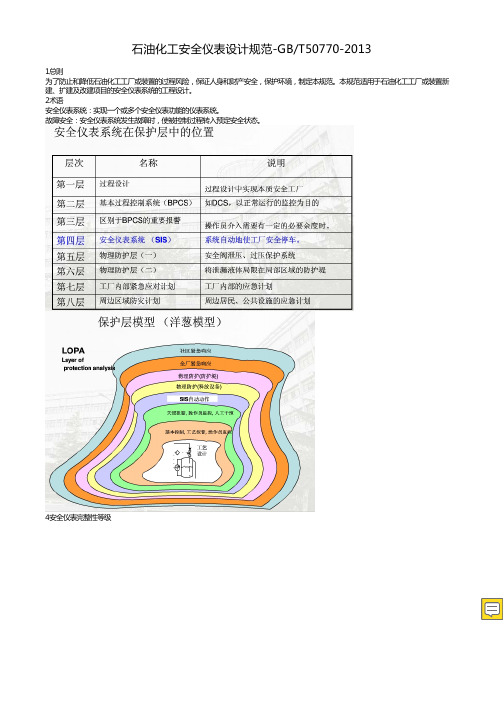
故障安全:安全仪表系统发生故障时,使被控制过程转入预定安全状态。
4安全仪表完整性等级安全完整性等级为SIL1-SIL4共四级。
石油化工工厂或装置的安全完整性等级最高为SIL3级。
SIL等级越高,安全仪表功能失效的概率越低。
SIL1级:很少发生事故,如发生事故,对装置和产品有轻微的影响,不会立即造成环境污染和人员伤亡,经济损失不大。
SIL2级:偶尔发生事故,如发生事故,对装置和产品有较大的影响,并有可能造成环境污染和人员伤亡,经济损失较大。
SIL3级:经常发生事故,如发生事故,对装置和产品将造成重大的影响,并造成严重的环境污染和人员伤亡,经济损失严重。
5设计基本原则5.1安全仪表系统应由测量仪表、逻辑控制器和最终元件等组成。
5.2石油化工工厂或装置的安全完整性等级不应高于SIL3级。
5.3安全仪表系统可实现一个或多个安全仪表功能,多个安全仪表功能可使用同一个安全仪表系统。
当多个安全仪表功能在同一个安全仪表系统内实现时,系统内的共用部分应符合功能中最高安全完整性等级要求。
5.4安全仪表系统不应介入或取代基本过程控制系统的工作。
5.5安全仪表系统应设计成故障安全型。
当安全仪表系统内部产生故障时,安全仪表系统应能按设计预定方式,将过程转入安全状态。
5.6安全仪表系统的中间环节应少。
5.7逻辑控制器的中央处理单元、输入输出单元、通信单元及电源单元等,应采用冗余技术。
5.8安全仪表系统的交流供电宜采用双路不间断电源的供电方式。
5.9安全仪表系统的接地应采用等电位连接方式。
5.10当安全仪表系统输入、输出信号线路中有可能存在来自外部的危险干扰信号时,应采取隔离器、继电器等隔离措施。
6测量仪表6.1测量仪表包括模拟量和开关量测量仪表,安全仪表系统宜采用模拟量测量仪表。
6.2测量仪表宜采用4-20ma叠加HART传输信号的只能变送器。
6.3在爆炸危险场所,测量仪表应采用隔爆型或本安型。
当采用本安系统时,应采用隔离式安全栅。
石油化工仪表接地设计规范

石油化工仪表接地设计规范1范围本规范规定了仪表接地分类、接地方法、接地系统、接地连接方法、接地系统接线、接地电阻等内容。
本规范规定的仪表及控制系统接地种类有:保护接地、工作接地、本质安全系统接地(以下简称:本安系统接地)、防静电接地和防雷接地。
本规范适用于石油化工企业新建及扩建项目的仪表及自动控制系统工程的仪表、分散型控制系统①CS)、可编程序控制系统(PLC)、工业控制计算机系统(IPC)、安全仪表系统(SIS)、火灾及可燃气体和有毒气体检测系统(FGS)、过程控制计算机系统(PCCS)等的接地系统设计。
改造设计可参照执行。
2接地分类2.1保护接地2.1.1 保护接地(也称为安全接地)是为人身安全和电气设备安全而设置的接地。
仪表及控制系统的外露导电部分,正常时不带电,在故障、损坏或非正常情况时可能带危险电压,对这样的设备,均应实施保护接地。
2. 1. 2低于36V供电的现场仪表,可不做保护接地,但有可能与高于36V电压设备接触的除外。
2.1.3 当安装在金属仪表盘、箱、柜、框架上的仪表,与已接地的金属仪表盘、箱、柜、框架电气接触良好时,可不做保护接地。
2.2 工作接地2.2.1仪表及控制系统工作接地包括:仪表信号回路接地和屏蔽接地。
本规定中的工作接地,均指仪表及控制系统工作接地。
2.2.2隔离信号可以不接地。
这里的“隔离”是指每一输入信号(或输出信号)的电路与其它输入信号(或输出信号)的电路是绝缘的、对地是绝缘的,其电源是独立的、相互隔离的。
2.2.3 非隔离信号通常以直流电源负极为参考点,并接地。
信号分配均以此为参考点。
2.2.4仪表工作接地的原则为单点接地,信号回路中应避免产生接地回路,如果一条线路上的信号源和接收仪表都不可避免接地,则应采用隔离器将两点接地隔离开。
2.3本安系统接地2.3.1 采用隔离式安全栅的本质安全系统,不需要专门接地。
2.3.2 采用齐纳式安全栅的本质安全系统则应设置接地连接系统。
SIS 标准与规范介绍

一、“安全仪表系统设计规范”简介
2.10 容错 fault tolerant 功能模块在出现故障或错误时,仍继续执行特 定功能的能力。
2.11表决 voting 用多数原则确定结论.
2.12故障安全 fail to safe 安全仪表系统发生故障时,使被控制过程转入 预定安全状态。
3
可靠性范围 0.9~0.99 0. 99~0.999 0. 999~0.9999
平均故障率范围 10-1~10-2 10 -2~10-3
10 -3~10 -4
2.5 最终执行元件 final element
安全仪表系统的一部分,执行必要的动作,使过程达 到安全状态.
2.6 逻辑运算器 logic solver
6.1 安全仪表系统的逻辑运算器可由继电器系统或可编程 序电子系统构成,也可由其混合构成。
6.2 逻辑运算器的技术选择原则
6.2. 1 继电器系统
继电器系统用于输入输出点较少、逻辑功能简单的场合.
6.2.2 可编程序电子系统
a) 可编程序电子系统用于下列场合:
1) 输入输出点较多;
2) 逻辑功能复杂;
一、“安全仪表系统设计规范”简介
2.13显性故障 overt fault 能够显示自身存在的故障。
2.14 隐性故障 covert fault 不能显示自身存在的故障。
2.15 平均故障间隔时间 mean time between failures (MTBF) 相邻故障间隔的平均时间(包括平均失效时间和平均 修复时间)
安全仪表系统提供。 5.4.6 安全仪表系统的电磁阀宜采用隔爆型。
一、“安全仪表系统设计规范”简介
(完整版)石油化工仪表接地设计要求规范

石油化工仪表接地设计规范1范围本规范规定了仪表接地分类、接地方法、接地系统、接地连接方法、接地系统接线、接地电阻等内容.本规范规定的仪表及控制系统接地种类有:保护接地、工作接地、本质安全系统接地(以下简称:本安系统接地)、防静电接地和防雷接地。
本规范适用于石油化工企业新建及扩建项目的仪表及自动控制系统工程的仪表、分散型控制系统(DCS)、可编程序控制系统(PLC)、工业控制计算机系统(IPC)、安全仪表系统(SIS)、火灾及可燃气体和有毒气体检测系统(FGS)、过程控制计算机系统(PCCS)等的接地系统设计。
改造设计可参照执行。
2接地分类2.1保护接地2.1.1 保护接地(也称为安全接地)是为人身安全和电气设备安全而设置的接地.仪表及控制系统的外露导电部分,正常时不带电,在故障、损坏或非正常情况时可能带危险电压,对这样的设备,均应实施保护接地。
2.1.2 低于36V供电的现场仪表,可不做保护接地,但有可能与高于36V电压设备接触的除外。
2.1.3 当安装在金属仪表盘、箱、柜、框架上的仪表,与已接地的金属仪表盘、箱、柜、框架电气接触良好时,可不做保护接地。
2.2 工作接地2.2.1 仪表及控制系统工作接地包括:仪表信号回路接地和屏蔽接地。
本规定中的工作接地,均指仪表及控制系统工作接地。
2.2.2 隔离信号可以不接地。
这里的“隔离"是指每一输入信号(或输出信号)的电路与其它输入信号(或输出信号)的电路是绝缘的、对地是绝缘的,其电源是独立的、相互隔离的。
2.2.3 非隔离信号通常以直流电源负极为参考点,并接地.信号分配均以此为参考点.2.2.4 仪表工作接地的原则为单点接地,信号回路中应避免产生接地回路,如果一条线路上的信号源和接收仪表都不可避免接地,则应采用隔离器将两点接地隔离开.2.3本安系统接地2.3.1 采用隔离式安全栅的本质安全系统,不需要专门接地。
2.3.2 采用齐纳式安全栅的本质安全系统则应设置接地连接系统。
石油化工安全仪表专业系统设计标准规范内容
2.19平均失效时间Mean time to failure (MTTF)
指功效单元实现要求功效失效平均时间。
2.20可用性Availability(A)
指系统能够使用工作时间概率。
2.21可靠性Reliability(R)
指系统在要求时间间隔内发生故障概率.
3.2安全仪表系统包含传感器,逻辑单元和最终实施元件;当过程达成预定条件时,安全仪表系统动作,将过程带入安全状态。
3.3依据对过程危险性分析,人员、过程、设备及环境保护要求及安全度等级要求确定安全仪表系统功效。
3.4安全仪表系统可根据安全度等级要求分为1,2,3级。安全等级越高,安全仪表系统安全功效越强。
DIN V 19250 Programmable safety system.
IEC 61131 Programmable controller.
1.4实施本标按时,尚应符合国家现行相关标准要求。
2
下列术语适适用于本规范:
2.1危险故障Dangerous Failure
指能够造成安全仪表系统处于危险或失去功效故障。
系统故障时性能递减方法:4-2-O
系统中二个控制模块各有二个CPU,同时工作又相对独立。当一个控制模块中CPU被检测出故障时,该CPU 被切除,切换到2-0工作方法;其它一个控制模块中二个CPU以1oo2D方法投入运行,若这一个控制模块中再有一个CPU被检测出故障时,系统停车。
3. 基础标准
3.1安全仪表系统独立于过程控制系统,独立完成安全保护功效。
2.2安全仪表系统 Safety InstrumentedSystem (SIS)
指能实现一个或多个安全仪表功效系统。系统包含传感器,逻辑运算器和最终实施元件。
石油化工安全仪表系统设计规范
石油化工安全仪表系统设计规范
石油化工安全仪表系统是石油化工生产过程中非常重要的一部分,它的设计规
范直接关系到生产过程中的安全性和稳定性。
在设计石油化工安全仪表系统时,需要考虑到各种因素,包括工艺流程、环境条件、安全要求等,以确保系统能够准确、可靠地监测和控制生产过程中的各种参数。
首先,在设计石油化工安全仪表系统时,需要充分考虑工艺流程的特点。
不同
的工艺流程对安全仪表系统的要求也会有所不同,因此需要根据具体的工艺流程来确定系统的类型、数量和布置方式。
同时,还需要考虑到工艺流程中可能出现的各种异常情况,如高温、高压、腐蚀等,以确保系统能够在各种恶劣条件下正常运行。
其次,在设计石油化工安全仪表系统时,需要充分考虑环境条件的影响。
石油
化工生产现场通常环境条件较为复杂,可能会受到高温、高压、腐蚀、振动等因素的影响,因此需要选择能够适应恶劣环境的安全仪表设备,并采取相应的防护措施,以确保系统能够稳定可靠地运行。
另外,在设计石油化工安全仪表系统时,需要充分考虑安全要求。
石油化工生
产过程中安全性是首要考虑的因素,因此安全仪表系统的设计需要符合相关的安全标准和规范,确保系统能够及时准确地监测和控制各种参数,及时发现并处理各种异常情况,以确保生产过程的安全稳定。
总之,设计石油化工安全仪表系统需要充分考虑工艺流程、环境条件和安全要
求等因素,以确保系统能够在各种恶劣条件下稳定可靠地运行,保障生产过程的安全性和稳定性。
希望本文所述的设计规范对相关从业人员有所帮助,谢谢阅读。
化工仪表安装设计规范
化工仪表安装设计规范化工仪表的安装应符合《石油化工仪表安装设计规范》(SH/T3104)的要求,相关规定如下。
一、安装位置(1)现场仪表的安装位置应便于接近、观察、维修及操作;在需要时,应设置专用的平台、梯子。
(2)现场仪表的防护等级和防爆等级应满足安装位置处的防护和防爆要求。
(3)现场仪表应避免安装在以下位置。
01、高温、腐蚀、浸泡的位置。
02、强烈振动的位置。
03、有较强的电磁干扰的位置。
04、阳光曝晒的位置,尤其在环境温度较高的地区。
05、易受雷击的位置,尤其在强雷区、多雷区。
06、专用通道,如消防通道、人行通道、检修通道等。
二、过程连接(1)仪表过程连接处的材质不应低于过程连接处的工艺管道或设备的材质。
(2)仪表过程连接处的压力等级不应低于过程连接处的工艺管道或设备的压力等级。
(3)除另有规定外,有毒、可燃介质测量仪表过程连接法兰的最低公称压力应符合以下规定。
01、SHA级管道,最低公称压力不宜低于PN50。
02、SHB、SHC级管道,最低公称压力不宜低于PN20。
(4)除另有规定外,仪表过程连接处的法兰的垫片与紧固件应满足过程介质温度、防腐的要求并符合以下规定。
01、公称压力低于等于PN50的法兰,宜采用聚四氟乙烯包覆式垫片或缠绕式垫片厂。
02、公称压力大于等于PN110的法兰,宜采用金属环垫,材质应满足介质的防腐要求及法兰的硬度要求。
03、剧毒、可燃性介质,温度高、温差大、机械振动以及压力脉动的管道宜采用缠绕式垫片。
(5)测量有毒介质的仪表不得采用螺纹过程接口。
(6)仪表过程连接的位置宜方便安装与检修;当必要时,应设置专用的操作平台、梯子。
(7)用于安全保护功能测量的一次取源阀应独立设置。
三、导压管(1)导压管的材质和压力等级不应低于过程连接处的管道或设备材质和压力等级。
(2)导压管应尽量短,Pipe导压管的长度不宜超过15m,Tube导压管的长度不宜超过12m。
(3)在操作条件以及当地极端环境温度下,在测量介质出现结冻、冷凝、凝固,结晶或汽化情况下,导压管应采取伴热或绝热措施。
SH30182003石油化工安全仪表系统设计规范(Word)
中华人民共和国石油化工行业标准SH/T 3018-2003代替SH 3018-1990石油化工安全仪表系统设计规范2004-03-10发布 2004-07-01实施中华人民共和国国家发展和改革委员会发布目次前言 (Ⅲ)1 范围 (1)2 术语和定义 (1)3 基本原则 (3)4 传感器 (3)5 最终执行元件 (4)6 逻辑运算器 (4)7 通信接口 (5)8 人机接口 (5)9 过程接口 (6)10 软件组态 (6)11 工程设计 (6)附录A(资料性附录)安全仪表系统规格书编制提纲 (8)用词说明 (11)附:条文说明 (13)石油化工安全仪表系统设计规范1范围1.1本规范适用于新建、改扩建石油化工装置(或工厂)安全仪表系统的工程设计。
储运系统、公用工程及辅助设施等工程设计可参照执行。
1.2安全仪表系统的工程设计必须满足石油化工装置(或工厂)安全度等级的要求。
1.3相关标准如下:IEC 61508 Functional safety of electrical/electornic/programmable electronic safety-related systemsIEC 61511 Functionalsafety: safety instrumented systems for the process industry sectorANSI/ISA-84.01 Application of safety instrumented system for the process industriesDIN V 19250 Porgrammable safety systemIEC 61131 Programmable controller1.4执行本标准时,尚应符合国家现行有关强制性标准规范的要求。
2术语和定义下列术语和定义适用于本规范2.1危险故障 dangerous failure能够导致安全仪表系统处于危险或失去功能的故障。
石油化工储运罐区安全仪表系统的设计和使用
二. 项目流程及考虑的主要问题
2. 可行性研究报告 可行性研究报告的主要内容: 3 安全仪表系统现状与需求 1. 安全仪表系统现状 2. 系统联锁逻辑的现状 3. 需求分析及存在问题
5. 逻辑控制器及人机接口 12.文档管理
6. 应用软件
13.系统停用
7. 测量仪表
二. 项目流程及考虑的主要问题
1. 立项报告 安全仪表系统的立项一般跟随工艺装置的建设或改
造一起立项。 只有单独对安全仪表系统改造或升级时才做专门的
立项报告。
二. 项目流程及考虑的主要问题
2. 可行性研究报告 安全仪表系统的工程设计应满足石油化工工厂或装
完成安全仪表功能。 安全仪表系统不应介入或取代基本过程控制系统的
工作。 基本过程控制系统不应介入安全仪表系统的运行或
逻辑运算。
二. 项目流程及考虑的主要问题
2. 可行性研究报告 安全仪表系统应设计成故障安全型。当安全仪表系
统内部产生故障时,安全仪表系统应能按设计预定 方式,将过程转入安全状态。 安全仪表系统的逻辑控制器应具有硬件和软件自诊 断功能。 逻辑控制器的中央处理单元、输入输出单元、通信 单元及电源单元等,应采用冗余技术。
正式发布版本。 安全仪表系统软件、编程、升级或修改等文档应备
份。 安全仪表系统内的设备宜设置同一时钟。
二. 项目流程及考虑的主要问题
2. 可行性研究报告 在大型石油化工项目中设置多套安全仪表系统时,
每套系统应能独立工作。 当安全仪表系统输入、输出信号线路中有可能存在
来自外部的危险干扰信号时,应采取隔离器、继电 器等隔离措施。
析,人员、过程、设备及环境的安全保护,以及安 全完整性等级等要求确定。
二. 项目流程及考虑的主要问题
石油化工安全仪表系统设计规范-SIL确定依据
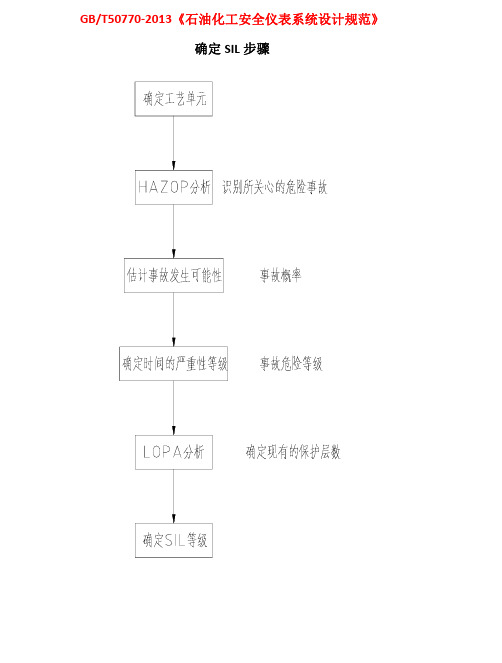
GB/T50770‐2013《石油化工安全仪表系统设计规范》
确定SIL步骤
危险事件可能性
危险事件严重等级
LOPA与HAZOP对比
LOPA的信息 HAZOP的信息
影响事件 后果
严重性等级 后果的严重性(S)
引发原因 原因
危险事件可能性 事故发生概率(L)
保护层 现有措施
要求的附加减轻 建议措施
SIL等级的区别:
SIL 1:测量仪表、最终元件可与基本过程控制系统共用,可采用单一 仪表;逻辑单元宜与过程控制系统分开,可采用冗余;(单个传感器、
单个逻辑控制器、单个执行元件,容错容冗)
SIL 2:测量仪表、最终元件宜与基本过程控制系统分开,宜采用冗余
;逻辑单元应与过程控制系统分开,宜采用冗余;(多个传感器、
多个逻辑控制器、多个执行元件,容错)
SIL 3:测量仪表、最终元件应与基本过程控制系统分开,应冗余 ;
逻辑单元应与过程;控制系统分开,应冗余;(多个传感器、多个逻
辑控制器、多个执行元件)
SIL1‐SIL4安全完整性的要求(失效率来控制)。
石油化工仪表供气设计规
石油化工仪表供气设计规范石油化工厂作为重要的工业生产基地,其生产过程中涉及到大量的气体控制和流量计量。
因此,石油化工厂在建设和运营过程中,需要有专门的仪表系统来进行气体供给和流量控制。
本文将分析石油化工仪表供气设计规范,包括仪表选择、管道设计以及压力控制等方面。
一、仪表选择石油化工仪表的选择应当根据生产工艺要求来确定。
根据需要测量的气体类型和流量范围,选择合适的仪表种类,包括流量计、压力变送器、压力表、温度计等。
在选择仪表时,应当考虑到其可靠性、精度、耐久性和易维护等方面。
同时,仪表的生产厂家应当是经过认证的知名厂家,产品符合国家标准,并能够提供完善的售后服务。
二、管道设计气体管道设计应当考虑到气体流量、压力、温度等参数,并根据对应的规范进行设计。
管道的选材应当满足耐高压、耐腐蚀、耐高温等特殊要求,一般以大直径无缝钢管为主。
在管道布局设计时,应当合理进行分布,尽量减少管道长度、防止弯曲和减少过多的接头。
此外,管道的支架和固定设备也应当考虑到气体流量和保障安全的要求。
三、压力控制在气体供气系统中,压力控制是非常重要的环节。
为了保证供气稳定,压力控制设备必须按照规范进行选型和设置。
在压力控制系统中,应当设置压力传感器、调节阀和报警器等设备,以确保目标压力得到精确的控制和调节。
此外,在压力控制的过程中,应当对系统中出现的压力波动进行监测,并及时采取措施加以调整。
这样可以有效地避免压力失控造成的安全事故。
总之,石油化工仪表供气设计规范的确立和执行可以保障气体供给的安全和稳定,大大提升石油化工厂的生产效率和可靠性。
在执行过程中,我们需要注意仪表选择、管道设计和压力控制等方面,以确保系统的完整和稳定。
以上就是石油化工仪表供气设计规范的相关介绍,希望对你有帮助。
石化行业仪表安装设计规范
石化行业仪表安装设计规范石油化工中仪表具有监测,预警及指示等功能,安装不当不仅会影响整个工程的正常运行,严重时会发生化工事故,威胁化工人生命安全。
一、一般规定(一)现场仪表的安装位置应满足以下要求:1、易于接近、观察及操作,必要时设置专用的操作平台和梯子。
2、避开高温、强烈振动的场所。
3、避开静电干扰和电磁干扰,当无法避开时,应采取适当的抗静电干扰、电磁干扰的措施。
4、具有适应现场环境的防护措施。
5、非防水仪表设在室外时,应安装于仪表保护箱内。
6、非防爆仪表用于爆炸危险场所时,应安装于正压式仪表柜内或采取其它防爆措施,并符合有关防爆规范要求。
(二)仪表与工艺过程的连接应满足以下要求:1、工艺管道上或设备上的仪表连接头(管嘴)、法兰及仪表引压管道的材质和压力等级不应低于工艺管道或设备上连接件的材质和压力等级。
2、除设计另有规定外,仪表测量用介质引压管道的连接法兰最低公称压力,应符合下列规定:a)A级管道法兰的公称压力,不宜低于5.OMPa;b)B、C级管道法兰的公称压力,不宜低于2.OMPa;3、设计压力不大于0.6MPa的蒸汽、空气和水管道,其法兰的公称压力,不宜低4、除设计另有规定外,法兰密封用垫片应符合下列规定:a)一般公称压力低于5.OMPa的法兰可采用石棉橡胶板垫片或聚四氟乙烯包覆垫片;b)剧毒,可燃介质或温度高、温差大、受机械振动或压力脉动的管道宜采用缠绕式垫片;c)高温、高压管道宜采用金属环垫,其材质应满足介质防腐要求及法兰硬度要求。
5、仪表连接头(管嘴)的长度应根据工艺管道或设备的隔热层厚度确定。
6、仪表连接头(管嘴)的位置应便于切断阀或测量元件安装和检修,必要时应设置专用的操作平台或梯子。
(三)静压式测量仪表引压管道应满足以下要求:1、导压管宜采用①14x2,中18x3的不锈钢管道或碳钢管道,也可采用其他管道。
2、导压管的连接可采用承插焊方式、对焊方式或卡套方式连接,也可采用其他连接方式:根部取源阀应采用焊接方式。
SH30182019石油化工安全仪表系统设计规范-8页精选文档

中华人民共和国石油化工行业标准SH/T 3018-2019代替SH 3018-1990 石油化工安全仪表系统设计规范2019-03-10发布2019-07-01实施中华人民共和国国家发展和改革委员会发布目次前言 (Ⅲ)1 范围 (1)2 术语和定义 (1)3 基本原则 (3)4 传感器 (3)5 最终执行元件 (4)6 逻辑运算器 (4)7 通信接口 (5)8 人机接口 (5)9 过程接口 (6)10 软件组态 (6)11 工程设计 (6)附录A(资料性附录)安全仪表系统规格书编制提纲 (8)用词说明 (11)附:条文说明 (13)石油化工安全仪表系统设计规范1范围1.1本规范适用于新建、改扩建石油化工装置(或工厂)安全仪表系统的工程设计。
储运系统、公用工程及辅助设施等工程设计可参照执行。
1.2安全仪表系统的工程设计必须满足石油化工装置(或工厂)安全度等级的要求。
1.3相关标准如下:IEC 61508 Functional safety of electrical/electornic/programmable electronic safety-related systemsIEC 61511 Functionalsafety: safety instrumented systems for the process industry sectorANSI/ISA-84.01 Application of safety instrumented system for the process industriesDIN V 19250 Porgrammable safety systemIEC 61131 Programmable controller1.4执行本标准时,尚应符合国家现行有关强制性标准规范的要求。
2术语和定义下列术语和定义适用于本规范2.1危险故障dangerous failure能够导致安全仪表系统处于危险或失去功能的故障。
石油化工安全仪表系统设计
石油化工安全仪表系统设计Code for design of safety instrumented system C d f d i f f t i t t d tin petrochemical engineering中华人民共和国国家标准中华人共和家标准中华人民共和国国家标准GB/T 50770 -2013《石油化工安全仪表系统设计规范》Code for design of safety instrumented systemin petrochemical engineeringin petrochemical engineering2013-02-07发布2013-09-01 实施中华人民共和国住房和城乡建设部联合发布中华人民共和国国家质量监督检验检疫总局编制依据建标[2008] 105号文2008年工程建设标准制订、修订计划(第二批)中华人民共和国住房和城乡建设部2008年国标编制及参加单位主管部门:中华人民共和国住房和城乡建设部主管部门主编部门:中国石油化工集团公司主编单位:中国石化工程建设公司主编单位中化程建设公参编单位:中国石油寰球工程公司中国石化集团宁波工程有限公司北京康吉森自动化设备技术有限责任公司中石化-霍尼韦尔(天津)有限公司参加单位:中国石化集团洛阳石油化工工程公司中国石化集团上海工程有限公司中国石油天然气华东勘察设计研究院中国石油集团大庆石化工程公司中国石化扬子石化分公司上海黑马安全自动化系统有限公司北京天时盈达自动化设备有限公司编制工作进程2008年1月中国石化工程建设公司向中国石化集团公司工程部申请立项《石油化工安全仪表系统设计规范》国家标准编制项目,由中国石化集团公司上报住房和城乡建设部2008年6月住房和城乡建设部[2008]105号文《2008年工程建设标准制订、住房和城乡建设部[2008]105号文《2008年工程建设标准制订修订计划(第二批)》批准了《石油化工安全仪表系统设计规范》制定项目申请2008年12月在中国石化集团公司工程部组织领导下,成立由中国石化工程建设公司为主编单位,中国寰球工程公司、中国石化宁波工程建设为主编单位中寰球程中化宁波程公司、北京康吉森自动化设备技术有限责任公司、中石化-霍尼韦尔(天津)有限公司为参编单位的编制组,确定了主编及参编人员、分工及编制提纲2010年1月《石油化工安全仪表系统设计规范》征求意见稿完成,上报中国石化集团公司工程部,以函审及上网形式向全国石化行业自动化专家广泛征求意见2010年9月中石化、中石油、中海油、中化等设计、制造、应用方面36位年月中石化中石油中海油中化等设计制造应用方面位石化自动化专家共提出479条意见和建议,采纳212条2010年10月《石油化工安全仪表系统设计规范》送审稿完成,上报中国石化集团公司工程部编制工作进程2010年10月住房和城乡建设部和中国石化集团公司工程部在重庆主持召开国家标准《石油化工安全仪表系统设计规范》送审稿审查会,32个单位43名石油化工自动化专家参加会议2011年1月编制组根据送审稿审查纪要进行修改和完善,《石油化工安全仪表系统设计规范》报批稿完成,上报中国石化集团公司工程部2011年4月住房和城乡建设部和中国石化集团公司工程部在上海主持召开《石油化工安全仪表系统设计规范》报批稿定稿会,24位石油化工自动化专家参加会议2011年8月编制组根据报批稿定稿会的纪要进行修改和完善,《石油化工安全仪表系统设计规范》报批稿完成,报请住房和城乡建设部予以审批2011年12月编制组根据住房和城乡建设部专家最终审查意见修改和完善,《石油化工安全仪表系统设计规范》最终报批稿完成,上报住房和城乡建设部审批发布实施编制工作进程国家标准《石油化工安全仪表系统设计规范》GB/T507702013 国家标准《石油化工安全仪表系统设计规范》GB/T50770-2013发布实施,是中国石化行业石油化工自动化专家,设计、制造、应用方面专家智慧的结晶,是各方团结协作努力的结果;规范和细化了石油化工安全仪表系统设计工作。
石油化工安全仪表系统设计规范
石油化工安全仪表系统设计规范中华人民共和国石油化工行业标准SH/T 3018-2003代替SH 3018-1990石油化工安全仪表系统设计规范2004-03-10发布 2004-07-01实施中华人民共和国国家发展和改革委员会发布目次前言……………………………………………………………………………? 1 范围………………………………………………………………………… 1 2 术语和定义………………………………………………………………… 1 3 基本原则…………………………………………………………………… 3 4 传感器………………………………………………………………………3 5 最终执行元件………………………………………………………………4 6 逻辑运算器………………………………………………………………… 4 7 通信接口……………………………………………………………………5 8 人机接口…………………………………………………………………… 5 9 过程接口……………………………………………………………………6 10 软件组态........................................................................... 6 11 工程设计........................................................................... 6 附录A(资料性附录)安全仪表系统规格书编制提纲..................... 8 用词说明.............................................................................. 11 附:条文说明 (13)石油化工安全仪表系统设计规范1范围1(1本规范适用于新建、改扩建石油化工装置(或工厂)安全仪表系统的工程设计。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.总则1.1 本规范适用于新建、改扩建石油化工装置(或工厂)安全仪表系统的工程设计。
石油化工厂公用工程及辅助设施等工程设计可参照执行。
1.2 安全仪表系统的工程设计必须满足石油化工装置(或工厂)安全等级的要求。
1.3 相关标准如下:IEC 61508 “Functional safety of electrical/electronic/programmable electronic safety-related systems.”IEC 61511 “Functional safety: safety instrumented systems for the process industry sector.”ANSI/ISA-84.01 Application of safety instrumented system for the process industries.DIN V 19250 Programmable safety system.IEC 61131 Programmable controller.1.4 执行本标准时,尚应符合国家现行有关标准的要求。
2.名词术语下列术语适用于本规范:2.1 危险故障 Dangerous Failure指能够导致安全仪表系统处于危险或失去功能的故障。
2.2 安全仪表系统 Safety Instrumented System (SIS)指能实现一个或多个安全仪表功能的系统。
系统包括传感器,逻辑运算器和最终执行元件。
2.3 安全度等级 Safety Integrity Level(SIL)指用于描述安全仪表系统安全的等级,共4级, 4为最高级, 1为最低级。
2.4 最终执行元件 Final Element指安全仪表系统的一部分,执行必要的动作,使系统达到安全状态。
2.5 逻辑功能 Logic Function指将一个或多个输入信息转换为一个或多个输出信息的功能。
2.6 逻辑运算器 Logic Solver指安全仪表系统或过程控制系统中完成一个或多个逻辑功能的部件。
2.7 过程危险 Process Risk指由过程引起的危险或由过程和过程控制系统相互干扰引起的危险。
2.8 可编程电子系统 Programmable Electronic System (PES)指由一个或多个可编程电子设备组成,用于控制、保护或监视的系统。
该系统包括电源,中央处理单元,输入设备,数据高速通道和其它通信部件,输出设备等。
2.9 安全故障 Safe Failure指不会导致安全仪表系统处于危险或故障状态。
2.10 过程控制系统 Process Control System(PCS)指用于直接或间接控制过程及相关设备的控制系统,系统包括分散控制系统(DCS)、现场总线控制系统(FCS)、可编程控制系统(PLC)等。
2.11 冗余 Redundancy指为实现同一功能,使用多个相同功能的模块或部件。
2.12 容错 Fault Tolerant指功能模块在出现故障时,仍能继续正确执行特定功能的能力。
2.13 表决 Voting指系统中将每路数据进行比较和修正,用多数原则确定结论。
例如:2OO3 (2 out of 3) 3取22.14 故障安全 Fail to Safe指系统发生故障时被控制过程回到预定安全状态。
2.15 显性故障 Overt Fault指能够显示自身存在的故障。
2.16 隐性故障 Covert Fault指不能显示自身存在的故障。
2.17 平均故障间隔时间 Mean time between Failures(MTBF)指相邻故障间隔的平均时间。
(包括平均失效时间和平均修复时间)2.18 平均修复时间 Mean time to repair(MTTR)指故障修复所需要的平均时间(包括诊断,确认及等待时间)2.19 平均失效时间 Mean time to failure (MTTF)指功能单元实现规定功能失效平均时间。
2.20 可用性 Availability(A)指系统可以使用工作时间的概率。
2.21 可靠性 Reliability(R)指系统在规定的时间间隔内发生故障的概率.2.22 传感器 Sensor指用于测量过程变量的单一或组合设备(例如变送器,过程开关,位置开关等)2.23 三取二2oo3 (2 out of 3)系统故障时性能递减方式:3-2-O采用三取二表决方式,即三个CPU中若一个运算结果与其它两个不同,该CPU 故障,其余两个继续工作;若其余两个CPU运算结果再有不同时,则无法表示出哪一个是正确,系统停车。
2.24 二取一带自诊断 1oo2D 1 out of 2 with Diagnostic系统故障时性能递减方式:2-1-O当一个CPU被检测出故障时,该CPU 被切除,另一个CPU继续工作;若第二个CPU再被检测出故障时,系统停车。
2.25 双重化二取一带自诊断 2oo4D 2 out of 4 with Diagnostic系统故障时性能递减方式:4-2-O系统中二个控制模块各有二个CPU,同时工作又相对独立。
当一个控制模块中CPU被检测出故障时,该CPU 被切除,切换到2-0工作方式;其余一个控制模块中二个CPU以1oo2D方式投入运行,若这一个控制模块中再有一个CPU被检测出故障时,系统停车。
3. 基本原则3.1 安全仪表系统独立于过程控制系统,独立完成安全保护功能。
3.2 安全仪表系统包括传感器,逻辑单元和最终执行元件; 当过程达到预定条件时,安全仪表系统动作,将过程带入安全状态。
3.3 根据对过程危险性分析,人员、过程、设备及环境的保护要求及安全度等级要求确定安全仪表系统的功能。
3.4 安全仪表系统可按照安全度等级的要求分为1,2,3级。
安全等级越高,安全仪表系统的安全功能越强。
3.5 安全仪表系统应设计成故障安全型。
3.6 安全仪表系统采用经TüV认证的可编程序控制器系统。
3.7 安全仪表系统应具有硬件和软件诊断和测试功能。
3.8 安全仪表系统构成应使中间环节最少。
3.9 安全仪表系统的传感器、最终执行元件宜单独设置。
3.10 安全仪表系统应能与过程控制系统、工厂管理系统进行通信。
3.11 安全仪表系统应提供独立于逻辑单元的手动设施,直接操作最终执行元件。
3.12 安全仪表系统应设计成当能源中断又恢复后,过程不应自动再起动。
3.13 当多个单元的保护功能在一套安全仪表系统内完成时,其共用部分应符合最高安全等级要求。
3.14 安全仪表系统的人机接口宜与过程控制系统相同。
4.传感器4.1 传感器的独立设置原则如下:4.1.1 1级安全仪表系统,其传感器可与过程控制系统共用;4.2.2. 2级安全仪表系统,其传感器宜与过程控制系统分开;4.2.3. 3级安全仪表系统,其传感器应与过程控制系统分开;4.2 传感器的冗余设置原则如下:4.2.1. 1级安全仪表系统,可采用单一的传感器;4.2.2. 2级安全仪表系统,宜采用冗余的传感器;4.2.3. 3级安全仪表系统,应采用冗余的传感器;4.3 传感器的冗余方式选用如下:4.3.1 当重点考虑系统的安全性时,应采用“或”逻辑结构;4.3.2 当重点考虑系统的可用性时,应采用“与”逻辑结构;4.3.3 当系统的安全性和可用性均需保障时,宜采用三取二逻辑结构;4.4 安全仪表系统的传感器输出信号宜采用4~20 mA.DC, 不宜采用开关信号。
4.5 安全仪表系统和过程控制系统共用一个过程变量时,可采用二个传感器。
4.6 安全仪表系统和过程控制系统共用一个传感器时,宜采用安全仪表系统供电。
5.最终执行元件5.1 最终执行元件可以是安全仪表系统用的切断阀,与过程控制系统共用的控制阀或电动阀等。
气动控制阀或气动切断阀均应带接受安全仪表系统控制信号的电磁阀。
5.2 阀门的独立设置原则如下:5.2.1 1级安全仪表系统,其阀门可与过程控制系统共用,应确保安全仪表系统的动作优先过程控制系统的动作;5.2.2 2级安全仪表系统,其阀门宜与过程控制系统分开;5.2.3 3级安全仪表系统,其阀门应与过程控制系统分开;5.3 阀门的冗余设置原则如下:5.3.1 1级安全仪表系统,可采用单一的阀门;5.3.2 2级安全仪表系统,宜采用冗余的的阀门,如采用单一的阀门,配套的电磁阀门宜冗余配置;5.3.3 3级安全仪表系统,应采用冗余的的阀门,配套的电磁阀门宜冗余配置;5.3.4 冗余配置的阀门,可采用一个控制阀和一个切断阀,均带电磁阀;5.4 电磁阀的设置原则如下:1. 控制阀上的电磁阀应安装在阀门定位器与执行机构之间;2. 电磁阀放空口应有防护措施;3. 当重点考虑系统的安全性时,冗余电磁阀宜采用串联连接;4. 当重点考虑安系统的可用性时,冗余电磁阀宜采用并联连接;5.电磁阀应采用长期带电型,电磁阀电源应由安全仪表系统提供。
5.5 电动阀的配置原则如下:1. 电动阀可共用于安全仪表系统和过程控制系统,可共用电动阀。
2. 电动阀不采用冗余配置,必要时可采用冗余的接点接入电气控制回路。
6.1 安全仪表系统的逻辑单元可由继电器系统或可编程序电子系统构成,也可由其混合构成。
6.2 逻辑单元的技术选择原则如下:6.2.1 继电器系统继电器系统用于输入输出点较少、逻辑功能简单的场合。
6.2.2 可编程序电子系统(1) 可编程序电子系统用于下列场合:1) 输入输出点较多;2) 逻辑功能复杂;3) 与过程控制系统进行数据通信;(2) 可编程序电子系统可以是可编程序逻辑控制器(PLC)、分散型控制系统(DCS)或其它专用系统。
6.3 逻辑单元的独立原则如下:6.3.1. 1级安全仪表系统,其逻辑单元宜与过程控制系统分开;6.3.2. 2级安全仪表系统,其逻辑单元应与过程控制系统分开;;6.3.3. 3级安全仪表系统,其逻辑单元必须与过程控制系统分开;6.3.4 专用的控制系统(如透平机控制系统)中有保护功能和控制功能,则该系统应符合安全度等级要求。
6.4 逻辑单元的冗余原则如下:6.4.1 1级安全仪表系统,可采用单一的逻辑单元;6.4.2 2级安全仪表系统,宜采用冗余的逻辑单元,其中央处理单元,电源单元,通信系统等应冗余配置,输入/输出模宜冗余配置。
6.4.3 3级安全仪表系统,应采用冗余容错的逻辑单元,其中央处理单元,电源单元,,输入/输出模块及通信系统等应冗余配置;6.4.4 专用的控制系统(如透平机控制系统)中含有安全保护功能和过程控制功能,该控制系统宜采用冗余容错的逻辑单元。
6.5安全仪表系统应具有符合安全度等级要求的故障诊断措施。
故障诊断应包括安全仪表系统的传感器、逻辑单元和最终执行元件。