交流异步电动机变频调速系统设计
起重机交流异步电动机变频调速系统的设计
优 点 ,笔 者 使 用 J 5 3 N 1 9模 块 进行 Zg e 技 术 的开 i e B
~ … …
…
21 ̄ 3 01 月 总口 , 分 别 是 J A v p v nH n l , J A vtc Z _ A p E e t a de r Z — Sak
E e t Z _ P r hrl vn ,J A A K p0 jc, vn,J A v e p ea E e t Z — f v be t i b
机 械 工 业 出 版 社 ,0 3 2 0 ( 任 编辑 责 李 洋 )
系统 中采 用 了转 速徽 分 负 反馈 技 术 ,而这 一 功
能 仍 利 用 A R 来 完 成 。 带 d /t 反 馈 的 A R 电 S nd 负 S
( 文 部 分 下转 第 9 英 2页 ) 科撞 创葡与生产力 {
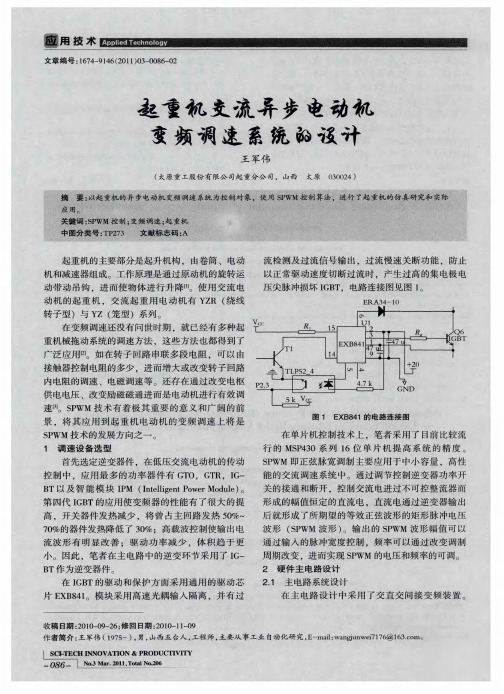
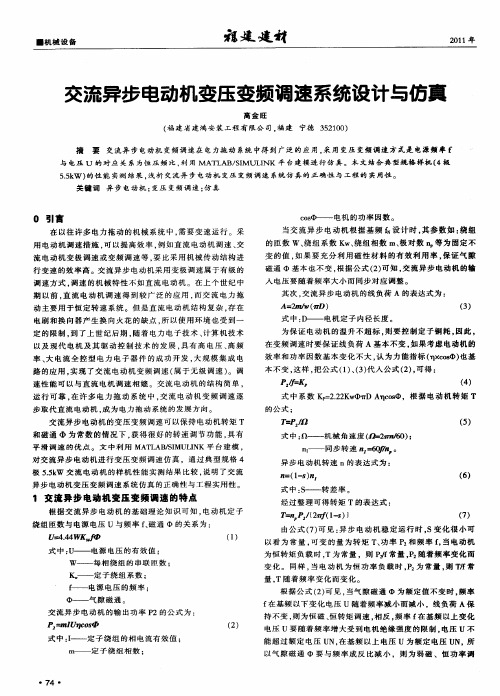
图 2 交 直 交 变 频 器 电 路
核 心 的单 片机 应 用 系统 。笔者 通过 软 硬 件相 结 合 实 现 起重 机异 步 电动 机 S WM 变频 调 速 ,不 仅使 硬件 P 简 单 降低 了产 品成本 ,而且 软 件代 码 较 少 ,从 而大 大 缩短 了开 发 时 间。
参考文献 :
图 3 ASR 电 路 图
路 ,改 变 微分 反 馈 环 节 参 数 C x d便 可 按 要 求 抑 dR
制 突 加给 定启 动 时转 速 的超 调 量 .经 调试 微 分 时 间
常 数取 值 = . 01 S 2.
S WM 调 制波 的 载波 比越 高 。所 含 的低 次 谐 波 P 的 分 量越 小 、5 z 波 所 占的 份 额越 大 .逆 变 器 0H 基 的效 率 就提 高 、同时 逆变 器 所需 的滤 波器 的尺 寸也
异步电动机的变频调速系统的设计与仿真word
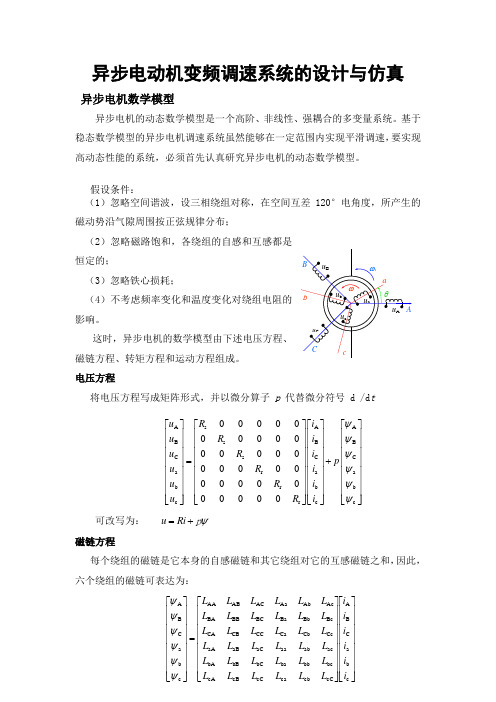
异步电动机变频调速系统的设计与仿真异步电机数学模型异步电机的动态数学模型是一个高阶、非线性、强耦合的多变量系统。
基于稳态数学模型的异步电机调速系统虽然能够在一定范围内实现平滑调速,要实现高动态性能的系统,必须首先认真研究异步电机的动态数学模型。
假设条件:(1)忽略空间谐波,设三相绕组对称,在空间互差120°电角度,所产生的磁动势沿气隙周围按正弦规律分布;(2)忽略磁路饱和,各绕组的自感和互感都是恒定的;(3)忽略铁心损耗;(4)不考虑频率变化和温度变化对绕组电阻的影响。
这时,异步电机的数学模型由下述电压方程、磁链方程、转矩方程和运动方程组成。
电压方程将电压方程写成矩阵形式,并以微分算子 p 代替微分符号 d /d tA A A sB B B sC C C s a a a r b b b r c c c r 000000000000000000000000000u i R u i R u i R p u i R u i R u i R ψψψψψψ⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎣⎦可改写为: u Ri ψ=+p 磁链方程每个绕组的磁链是它本身的自感磁链和其它绕组对它的互感磁链之和,因此,六个绕组的磁链可表达为:⎥⎥⎥⎥⎤⎢⎢⎢⎢⎡⎥⎥⎥⎥⎤⎢⎢⎢⎢⎡=⎥⎥⎥⎥⎤⎢⎢⎢⎢⎡C B A Cc Cb Ca CC CBCA Bc Bb Ba BC BB BA Ac Ab Aa AC AB AA C B A i i i i L L L L L L L L L L L L L L L L L L L L L L L L ψψψψ ABCu A u Bu Cω1ωu au b u ca bcθ可改写为: Li ψ=由于折算后定、转子绕组匝数相等,且各绕组间互感磁通都通过气隙,磁阻相同,故可认为:Lms Lmr =对于每一相绕组来说,它所交链的磁通是互感磁通与漏感磁通之和,因此,定子各相自感为转子各相自感为可得完整的磁链方程:sssr s s rsrr r r LL i L L i ψψ⎡⎤⎡⎤⎡⎤=⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦ 转矩方程根据机电能量转换原理,在多绕组电机中,在线性电感的条件下,磁场的储能和磁共能为:'m m 1122T T W W i i L ψ===而电磁转矩等于机械角位移变化时磁共能的变化率 (电流约束为常值),且机械角位移 θm = θ / n p ,于是:''rssr mme pp r s s r mconst.const.12T T i i L L W W T n n i i i i θθθθ==∂∂∂∂⎡⎤===⋅+⋅⎢⎥∂∂∂∂⎣⎦异步电机数学模型的过程中可以看出,这个数学模型之所以复杂,关键是因为有一个复杂的 6⨯6 电感矩阵,它体现了影响磁链和受磁链影响的复杂关系。
(完整版)异步电动机变频调速系统..
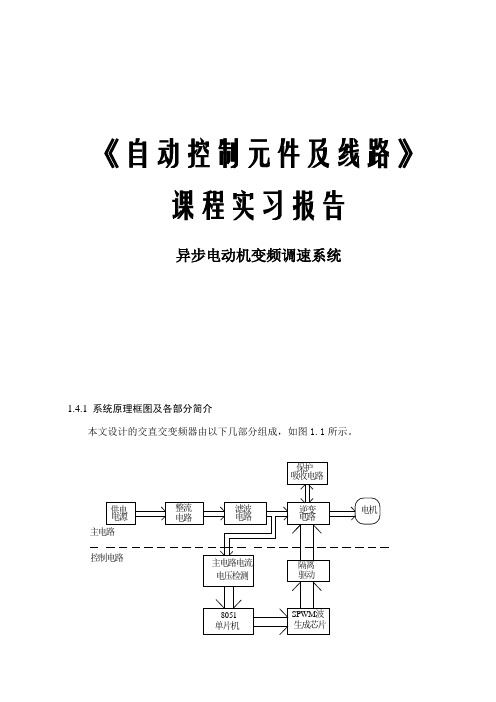
《自动控制元件及线路》课程实习报告异步电动机变频调速系统1.4.1 系统原理框图及各部分简介本文设计的交直交变频器由以下几部分组成,如图1.1所示。
图1.1 系统原理框图系统各组成部分简介:供电电源:电源部分因变频器输出功率的大小不同而异,小功率的多用单相220V,中大功率的采用三相380V电源。
因为本设计中采用中等容量的电动机,所以采用三相380V电源。
整流电路:整流部分将交流电变为脉动的直流电,必须加以滤波。
在本设计中采用三相不可控整流。
它可以使电网的功率因数接近1。
滤波电路:因在本设计中采用电压型变频器,所以采用电容滤波,中间的电容除了起滤波作用外,还在整流电路与逆变电路间起到去耦作用,消除干扰。
逆变电路:逆变部分将直流电逆变成我们需要的交流电。
在设计中采用三相桥逆变,开关器件选用全控型开关管IGBT。
电流电压检测:一般在中间直流端采集信号,作为过压,欠压,过流保护信号。
控制电路:采用8051单片机和SPWM波生成芯片SA4828,控制电路的主要功能是接受各种设定信息和指令,根据这些指令和设定信息形成驱动逆变器工作的信号。
这些信号经过光电隔离后去驱动开关管的关断。
1.4.2 变频器主电路方案的选定变频器最早的形式是用旋转发电机组作为可变频率电源,供给交流电动机。
随着电力半导体器件的发展,静止式的变频电源成为了变频器的主要形式。
静止式变频器从变换环节分为两大类:交-直-交变频器和交-交变频器。
1.交-交型变频器:它的功能是把一种频率的交流电直接变换成另一种频率可调电压的交流电(转换前后的相数相同),又称直接式变频器。
由于中间不经过直流环节,不需换流,故效率很高。
因而多用于低速大功率系统中,如回转窑、轧钢机等。
但这种控制方式决定了最高输出频率只能达到电源频率的1/3~1/2,所以不能高速运行。
2.交-直-交型变频器:交-直-交变频器是先把工频交流通过整流器变成直流,然后再直流变换成频率电压可调的交流,又称间接变频器,交-直-交变频器是目前广泛应用的通用变频器。
交流异步电动机变频调速系统设计报告

交流异步电动机变频调速系统设计报告一、引言异步电动机在工业生产中具有广泛的应用,通过变频调速系统可以实现对异步电动机的精确控制,提高生产效率和控制精度。
本文将详细介绍异步电动机变频调速系统设计的原理和过程。
二、系统设计原理异步电动机通过变频器驱动,实现调速功能。
变频器将交流电源转换为直流电源,通过PWM技术将直流电转换为交流电,进而控制电机的转速。
变频器的主要组成部分包括整流器、中间环节直流母线、逆变器和控制电路。
整流器将交流电源转换为直流电源,并通过滤波电路削波,保持直流电的稳定性。
中间环节直流母线存储电能,为逆变器提供稳定的电源。
逆变器将直流电源转换为交流电源,并通过PWM调制技术调整交流电的频率和幅值,从而控制电机的转速。
控制电路通过传感器采集电机的运行状态,并通过对逆变器的控制信号实现控制目标。
三、系统设计步骤1.确定系统需求:根据应用场景和任务要求,确定对异步电动机的调速要求,包括速度范围、控制精度等。
2.选择电机和变频器:根据系统需求,选择适合的异步电动机和变频器,确保其参数和性能满足需求。
3.设计电路连接:根据电机和变频器的技术规格,设计电机与变频器的连线方式和电路连接,确保信号传输畅通。
4.设计控制系统:根据系统需求,设计控制系统包括传感器、控制电路和控制算法等,确保对电机的精确控制。
5.实施系统调试:将设计好的电路和控制系统进行组装和调试,确保系统能够正常工作。
6.测试系统性能:对系统进行性能测试,包括速度响应、负载变化等测试,验证系统的设计目标是否达到。
7.优化系统性能:根据测试结果,对系统进行调整和优化,提高系统的性能和稳定性。
8.编写设计报告:整理系统设计过程、实施步骤和测试结果,撰写设计报告。
四、系统设计考虑因素1.变频器和电机的匹配性:选择变频器时需要考虑其输出能力是否足够满足电机的需求,包括最大输出功率、额定电流等。
2.控制系统的精确性:设计控制系统时需要考虑传感器的精度、控制器的计算性能等因素,确保控制系统能够精确控制电机的转速。
交流异步电动机变压变频调速系统设计与仿真
交流异步电动机变压变频调速系统设计与仿真异步电动机变压变频调速系统是一种常见的电动机调速系统,可以实现电动机转速的精确控制和调节。
本文将介绍异步电动机变压变频调速系统的设计和仿真。
首先,异步电动机的调速原理简要介绍。
异步电动机是一种常用的交流电动机,其转速通常由额定电压和频率决定。
通过改变电动机的电压和频率,可以实现对电动机的调速。
变压变频调速系统通过调节电压和频率的大小,改变电动机的转速。
在设计异步电动机变压变频调速系统之前,首先要确定电动机的参数。
电动机的参数包括额定功率、额定电压、额定电流等,这些参数可以从电动机的标牌上获取。
另外,还需要确定变压变频器的参数,包括额定电压范围、频率范围等。
这些参数将决定整个系统的性能。
设计异步电动机变压变频调速系统的关键是选取合适的变压变频器。
变压变频器是将电网的交流电转换为可调频率和可调电压的交流电的装置。
根据电动机的额定电压和变压变频器的额定电压范围,选取合适的变压变频器,以满足调速系统的要求。
设计异步电动机变压变频调速系统的下一步是进行系统的电路设计。
电路设计包括电动机的接线和变压变频器的接线。
电动机的接线要根据电动机的型号和相数来进行,确保电机的正常运行。
变压变频器的接线要根据变压变频器的接线图进行,确保变压变频器与电动机的连接正确。
完成电路设计后,还需要进行系统的控制设计。
控制设计包括电机的启动和停止控制、电机的转速控制等。
启动和停止控制一般采用按钮控制或者遥控控制,可以通过按钮或者遥控装置来启动和停止电动机。
转速控制一般采用PID控制器进行,通过调节变压变频器的输出电压和频率,来实现对电动机转速的控制和调节。
完成设计后,可以使用仿真软件进行系统的仿真。
常用的仿真软件有MATLAB/Simulink、PSIM等。
通过仿真可以验证系统的设计是否正确,并进行性能评估。
仿真结果可以用来优化系统的设计,提高系统的性能。
综上所述,异步电动机变压变频调速系统的设计和仿真是一个系统工程,需要从确定电动机和变压变频器的参数开始,进行电路设计和控制设计,最后进行仿真验证。
交流异步电动机变频调速设计
交流异步电动机变频调速设计异步电动机是工业生产过程中广泛使用的一种电机,widely used in industrial production. 它的运转速度受到电源的频率和极数的影响,因此在一些应用场合需要采取变频调速技术,以满足不同负载下的运转需求。
本文将介绍异步电动机变频调速设计的基本原理和具体实现方法。
一、异步电动机变频调速的原理异步电动机通过电源提供的交流电源驱动,其转速 n与电网频率 f 和定子极数 P 相关,公式为:n=60f/P 。
如图1所示,当电网频率为50Hz、极数为4极时,异步电动机的转速为1500 rpm。
当需要在同一台异步电动机下实现不同转速时,可以采用变频调速技术。
变频调速的原理是通过变频器改变电网电源的频率和电压,从而改变异步电动机的转速。
变频器通过将电源中的直流信号转换成相应的交流信号进行调节,例如通过将电源中的50Hz的电信号转换为30~50Hz的交流信号,使得异步电动机的转速得到调节。
二、异步电动机变频调速的实现方法1.输入电源与三相异步电动机连接。
2.将电源中的交流信号转换为直流信号,通过功率恒定的逆变器将直流信号转换为变频输出的交流信号。
3.通过多种控制方法调节电压频率,从而实现异步电动机转速的控制。
通常采用矢量控制和定速控制两种控制方式。
3.1 矢量控制矢量控制是一种高精度、高性能的控制方法,可以使异步电动机在不同的负载下达到相同的速度和扭矩。
矢量控制适用于较高的调速要求,可以在满足较高控制精度的同时,实现更好的动态性能。
3.2 定速控制定速控制是一种简单、常用的变频控制方法。
该方法通过设定电机的运行速度来调节输出频率和电压,使得异步电动机具有稳定的转速和扭矩。
三、结论本文通过介绍异步电动机变频调速的原理和实现方法,可以实现异步电动机在不同负载条件下达到相同的转速和扭矩,提高了运行效率和能源利用率。
异步电动机变频调速技术的应用将得到更加广泛的推广和应用。
实验二 三相交流异步电动机变频调速实验

实验二三相交流异步电动机变频调速实验一、实验目的1.学习和掌握变频器的操作及控制方法;2.深入了解三相异步电动机变频调速性能;3.进一步学习PLC控制系统硬件电路设计和程序设计、调试。
二、实验原理1.三相交流异步电动机变频调速原理通过改变三相异步电动机定子绕组电压的频率,可以改变转子的旋转速度,当改变频率的同时改变电压的大小,使电压与频率的比值等于常数,则可保证电动机的输出转矩不变。
变频器就是专用于三相异步电动机调频调速的控制装置。
它的输入为单相交流电压(控制750W及以下的小功率电动机)或三相交流电压(控制750W以上的大功率电动机),而输出为幅值和频率均可调的三相交流电压供给三相异步电动机。
变频器的生产厂家很多,产品也很多,但基本原理相同。
本实验中采用的是松下小型变频器VFO 200W,有如下几种操作模式。
(1)运行/停止、正转/反转的操作模式:对于电动机的启动/停止以及正反转的控制有外部操作和面板操作两种模式,通过专用参数的设定来实现。
面板操作模式:通过变频器自带面板上的操作键实现运行/停止、正转/反转控制;外部操作模式:通过接在变频器专用输入端开关信号的接通、断开实现运行/停止、正转/反转。
(2)频率设定模式:频率的设定分为面板设定、外部设定两种,通过专用参数的设定来实现。
面板设定模式是根据面板上的电位器或专用键来设定频率的大小。
外部设定模式可以通过变频器上专用输入端上的电位器、电压信号、电流信号、开关编码信号以及PWM信号来实现频率的设定。
2.实验电路图本次实验的主要内容为“外部控制和外部电位器频率设定”。
实验电路图如图17.1所示。
图17.1 三相交流异步电动机变频调速实验电路图由图17.1可知,运行时,PLC程序要使Y4为1,停止时要使Y4为0,频率大小通过改变1、2、3端连接的电位器位置来调节。
3.电路接线表本实验的电路接线表如下表17.1(注:图17.1中方框内的接线已经在内部接好,不需再接线)表17.1 三相交流异步电动机变频调速实验电路接线图三、实验步骤1.按表17.1接线(为了安全起见,接线时请务必断开QF4);2.征得老师同意后,合上断路器QF2和QF4,接通操作面板上的电源开关;3.运行PC机上的PLC工具软件FXGP_WIN-C,输入课前编好的PLC程序(或直接打开已经编制好的,路径为:HJD-DJ1 \程序\实验17\变频调速.PMW),确认程序无误后,将其写入到PLC并运行。
「异步电动机变频调速系统的设计与仿真」

「异步电动机变频调速系统的设计与仿真」异步电动机变频调速系统是一种常见的电力传动系统,具有调速范围广、动态响应好、控制精度高等优点。
本文将介绍异步电动机变频调速系统的设计与仿真,包括系统的结构、控制方案以及仿真结果评估。
首先,异步电动机变频调速系统由变频器、电机、传动装置以及控制系统组成。
变频器作为系统的核心,通过改变输入电压的频率和幅值,控制电机的转速。
电机是系统的执行器,通过转动输出机械功。
传动装置用于将电机的转动传递到负载物体上。
控制系统则根据系统的反馈信号来调节变频器的输出,实现对电机转速的精确控制。
在控制方案的设计中,可以采用电流矢量控制算法。
该算法通过测量电机的转子电流和转速,根据电机的模型推算出合适的电压矢量,以实现对电机转速的控制。
具体的控制步骤包括电机速度测量、电机参数辨识、电机模型预测、电压矢量计算和电压输出等。
为了评估异步电动机变频调速系统的性能,需要进行仿真实验。
仿真实验可以通过模拟各种状态和故障条件,得到系统的输出结果,并评估控制方案的有效性和性能。
在进行仿真实验时,可以设定电机的负载变化、输入电压变化等参数,并根据实际应用需求设定系统的性能指标。
通过对系统的输出结果进行分析和比较,可以评估系统的控制性能和稳定性,并进行相应的调整和优化。
总之,异步电动机变频调速系统的设计与仿真是一个复杂的过程,需要考虑到电机的特性、负载情况以及控制系统的性能指标。
通过合理的设计和仿真实验,可以得到一个性能优越的调速系统,满足实际应用需求。
4章 交流异步电动机变频调速系统

为交流异步电动机转矩系数,其中Nr为转子绕组有效匝数;
φr为转子功率因数角。
可见,转矩控制的困难体现在以下几点: T T ① m 是由定子电流is iA , iB , iC 和转子电流 ir ia , ib , ic 共同产生的,它的
空间位置相对于定子和转子都是运动的。 ② m 与 I r 是两个相互耦合的变量,且 I 对于一般的鼠笼形异步电机是无法 r ③ r 是与转速相关的时变量(与转差s有关), 且当电机运行时转子电阻 Rr 随温度变化而变化, Te 也随之变化。除此以外,式中的 Te 只是平均转矩的概念, 对平均转矩的控制已十分困难了,更何况瞬时转矩。对转速的控制实质上就是 对转矩的控制,转矩控制的困难是实现交流电机高性能调速的主要障碍,也是 过去限制交流调速系统获得广泛应用的主要原因。 2)调速装置中器件发展的限制:调速装置中两大组成部件是主电路和控制电路。 主电路中的主要器件—电力电子功率器件在近五十年来更新换代了五代之多,以 适应变频调速(PWM脉宽调制)的需要。控制电路中的主要器件—微处理器在 近二十年中运算速度提高了数倍,以适应高性能变频调速复杂算法的需要。交流 调速系统的发展依赖于新型电力电子器件的应用、微电子技术的发展。
直流调速系统中各部分分别为5%,40%和55%,而交流调速系统中各部分分别 为10%,60%和30%。特别是当功率大于500 kW,交流调速系统的成本比直流 调速系统的成本明显降低。 4.1.2交流电动机的调速方法及其主要应用领域 1.交流电动机的调速方法 由电机学可知,交流电动机的同步转速表达式为 60 f s (4.6) ns np ns 为同步转速。 式(4.6)中,np为电机极对数;fs为电机定子供电频率; (1) 同步电动机的调速方法 可见,均匀地改变同步电动机的定子供电频率fs,就可以平滑地调节电动机
完整版《三相异步电动机变频调速系统设计》

完整版《三相异步电动机变频调速系统设计》
一、异步电动机变频调速系统简介
异步电动机变频调速系统是一种基于变频器技术完成频率控制的调速系统,其结构组成主要包括:异步电动机、变频器、控制器和传动机构等组成。
本系统可以实现对电动机的输出功率、转速和负载的关系,从而提高机器的能源利用率,减少电机输出的能耗。
二、异步电动机变频调速系统组成
1.异步电动机:异步电动机是一种由能量变换设备的机械部分,它通过电能激励的电磁作用而可发生转动,其结构由定子、转子及密封装置等组成。
该部件能够接受输入的直流电压,完成外界功率转换。
2.变频器:变频器是由变频技术控制异步电动机输出电压和频率的装置,其特性是能够将低电压变高,将低频率调整到高频率,使输出电压与频率可以随着被控制设备的运行状况而灵活变化,能有效节省电源能耗,减少设备故障。
3.控制器:控制器是负责控制变频器给异步电动机提供指令的,它的功能有:对异步电动机的转矩与频率进行控制;实现变频器与异步电动机的细微调整;实现较快速度的反应。
实验四 异步电动机变频调速系统
1.通过实验掌握异步电动机带速度传感器矢量控制系统的组成及工作原理; 2.掌握异步电动机带速度传感器矢量控制系统静、动特性。 3.掌握数字化测速的原理。
二、异步电动机带速度传感器矢量控制系统工作原理
异步电动机的动态数学模型是一个高阶、 非线性、 强耦合的多变量系统, 虽然通过坐标变换可使之降阶并化简, 但并没有改变其非线性、多变量的本质。因此,需要异步电动机调速系统具有高动态性能时,必须面向这样一个动 态模型。经过多年的研究和实践,有几种控制方案已经获得了成功的应用,其中应用最多的方案之一,就是按转子 磁链定向的矢量控制系统。 在研究异步电动机的时候,如果以产生同样的旋转磁动势为准则,在三相坐标系上的定子交流电流iA,iB,iC 通过三相-两相变换可以等效成两相静止坐标系上的交流电流iα 和iβ ,再通过同步旋转变换,可以等效成同步旋转 坐标系上的直流电流id 和iq。如果观察者站到铁心上与坐标系一起旋转,他所看到的便是一台直流电动机。通过控 制,可是交流电动机的转子总磁通Φ r 就是等效直流电动机的励磁磁通,如果把d 轴定位于Φ r 的方向上,称作M (Magnetization)轴,把q 轴称作T(Torque)轴,则M 绕组相当于直流电动机的励磁绕组,im相当于励磁电流,T 绕组相当于伪静止的电枢绕组,it 相当于与转矩成正比的电枢电流。 如此一来,我们就可以模仿直流电动机的控制策略,得到直流电动机的控制量,经过相应的坐标反变换,就能 够控制异步电动机了。如图中所示,给定和反馈信号(转速、电枢电流)经过类似于直流调速系统所用的控制器,
控制类型的设置: 1.变频器菜单 1.4 电机控制→电机控制类型→选择“FVC” 给定方式的设置: 1.变频器菜单” 1.6 命令→给定1 通道→图形终端给定。 3.带速度传感器矢量控制系统静特性的测定 合上电源,调节给定频率至50Hz、30 Hz、15 Hz,使电机空载运行,负载电阻置最 大,调节实验台左侧单相调压器,使发电机励磁电流不大于0.57A,然后调节负载电阻, 将电机加至额定负载(变频器图形显示终端转矩显示为100% T),读取被测电动机转速 n,电流Ia,转矩T,逐渐减小发电机励磁电压直至为零,测取变频调速系统实验
三相的异步电动机变频调速系统设计的及仿真

三相的异步电动机变频调速系统设计的及仿真引言:在现代工业生产中,电动机作为一种重要的动力设备,广泛应用于各种机器和设备中。
为了满足不同工艺和运行要求,需要调节电动机的运行速度。
传统的方法是通过改变电源的频率来达到调速的目的。
然而,这种方法存在一定的局限性,无法实现精确的调速效果。
因此,引入变频调速系统成为了提高电机调速性能的有效手段。
本文将对三相异步电动机变频调速系统的设计及仿真进行详细介绍。
一、系统设计:1.变频器设计:变频器是变频调速系统的核心部分,用于将输入电源的频率和电压变换成适合电动机工作的频率和电压。
变频器由整流器、滤波器和逆变器组成。
整流器将输入的交流电变换成直流电,滤波器用于平滑输出电压,逆变器将直流电转换成可控的交流电输出。
变频器还包括控制模块,用于实现调速功能。
2.控制系统设计:控制系统包括速度传感器、PID控制器和功率放大器。
速度传感器用于实时测量电机转速,PID控制器根据设定转速和实际转速之间的差异,调节变频器的输出频率和电压,以实现电机的准确调速。
二、系统仿真:为了验证设计的可行性和调速性能,可以使用MATLAB/Simulink进行系统仿真。
具体的仿真流程如下:1. 搭建电机模型:根据电机的参数和等效电路,搭建电机的MATLAB/Simulink模型,包括电机的输入端口、输出端口和机械负载。
2. 设计控制系统:在Simulink中添加速度传感器、PID控制器和功率放大器,并与电机模型连接起来。
3.设定仿真参数:设置电机的参数、控制系统的参数和仿真时间等参数。
4.进行仿真实验:根据实际需求,设置不同的转速设定值,观察电机的响应情况,如稳态误差和调速时间等。
5.优化系统性能:根据仿真结果,调整参数和控制策略,优化系统的调速性能,如减小稳态误差和调速时间。
三、结论:三相异步电动机变频调速系统是一种能够实现精确调速的调速方案。
通过合理设计和仿真验证,可以得到一个性能稳定、调速精度高的变频调速系统。
三相异步电机交流变频调速系统设计实验
三相异步电机交流变频调速系统设计实验指导书仇国庆编写重庆邮电大学自动化学院测控技术实验中心2010/11/2三相异步电机交流变频调速系统设计实验指导书一、实验目的:1. 了解三相异步电机调速的方法;2. 熟悉交流变频器的使用;3. 掌握三相异步电机交流变频调速系统设计。
4. 交流异步电动机机械特性及变频调速特性测试二、控制系统设计要求系统设计要求能够实现三相异步电动机的如下状态的控制:正转;反转;停止;点动;加速;减速。
图1 控制系统硬件结构图三、基本知识:1.异步电动机调速系统种类很多,常见的有:(1)降电压调速;(2)电磁转差离合器调速(3)绕线转子异步电机转子串电阻调速(4)绕线转子异步电机串级调速(5)变极对数调速(6)变频调速等等。
2.三相交流异步电动机2.1 异步电动机旋转原理异步电动机的电磁转矩是由定子主磁通和转子电流相互作用产生的。
n转速顺时针旋转,转子绕组切割磁力线,产生转子电流⑴磁场以⑵通电的转子绕组相对磁场运动,产生电磁力⑶ 电磁力使转子绕组以转速n 旋转,方向与磁场旋转方向相同2.2 旋转磁场的产生旋转磁场实际上是三个交变磁场合成的结果。
这三个交变磁场应满足:⑴ 空间位置上互差rad 3/2π电度角。
由定子三相绕组的布置来保证⑵ 在时间上互差rad 3/2π相位角(或1/3周期)。
由通入的三相交变电流来保证。
2.3 电动机转速产生转子电流的必要条件:是转子绕组切割定子磁场的磁力线。
因此,转子的转速n 必须低于定子磁场的转速0n 。
两者之差称为转差:n n n -=∆0转差与定子磁场转速(常称为同步转速)之比,称为转差率:0/n n s ∆=同步转速0n 由下式决定:p f n /600=上式中,f 为输入电流的频率,p 为旋转磁场的极对数。
由此可得转子的转速:p s f n /)1(60-=3.异步电动机调速由转速p s f n /)1(60-=可知异步电动机调速有以下几方法:(1) 改变磁极对数p (变极调速)定子磁场的极对数取决于定子绕组的结构。
完整版《三相异步电动机变频调速系统设计》
完整版《三相异步电动机变频调速系统设计》三相异步电动机变频调速系统是一种应用广泛的电机控制系统,通过对电机的供电频率和电压进行调整,实现电机的调速功能。
本文将对三相异步电动机变频调速系统进行详细的设计。
1.系统结构三相异步电动机变频调速系统主要由电机、变频器和控制系统三部分组成。
电机作为执行元件,接受变频器输出的电压和频率进行运行;变频器则负责将输入的电网电压和频率转换为适合电机运行的电压和频率;控制系统则完成对变频器的控制和监测,实现对电机的精确调速。
2.硬件设计在硬件设计方面,需要选择适合电机的变频器和控制器,并完成相应的接线和连接。
变频器通常需要选择带有电压和频率调节功能的型号,以满足不同工作条件下的电机要求。
控制器则需要选择具备快速响应和稳定性能的型号,以确保系统的准确调速。
3.变频器参数设置变频器的参数设置对于电机的工作性能影响较大。
在设置参数时,首先需要根据电机的额定功率和工作特性确定变频器的额定输出功率。
同时,还需要根据电机的额定电压和额定转速设置变频器的额定输出电压和额定输出频率。
此外,还需要根据电机的负载特性设置变频器的过载保护和反馈调节参数。
4.控制系统设计控制系统的设计主要包括速度信号检测、计算和反馈控制三个步骤。
速度信号检测可以通过安装编码器或霍尔传感器等装置实现。
根据检测到的速度信号,控制系统可以计算出电机的当前转速,并与设定的目标转速进行比较,得到误差信号。
通过对误差信号进行PID控制,控制系统可以调整变频器的输出频率和电压,以实现对电机转速的控制。
5.保护措施设计三相异步电动机变频调速系统在运行过程中需要考虑到一些保护措施,以防止电机过载、短路等故障。
常见的保护措施包括过载保护、过流保护、过热保护和失速保护等。
通过在控制系统中添加相应的保护逻辑和监测装置,可以及时发现并处理电机故障,保证系统的安全运行。
总之,三相异步电动机变频调速系统设计涉及到硬件设计、变频器参数设置、控制系统设计和保护措施设计等方面。
交流异步电动机变压变频调速系统设计与仿真
在 变 频 调 速 时 要 保 证 线 负 荷 A基 本 不 变 , 如果 考虑 电动 机 的
效 率 和 功 率 因 数 基 本 变 化 不 大 , 为 力 能 指 标 ( x oO) 认 " cs 也基 q
本不变 , 样 , 公式 ()() 这 把 1 、3 代入 公 式 ( ) 可 得 : 2 ,
P / Ke 2= f -
的公式 :
() 4
运 行 可 靠 . 许 多 电力 拖 动 系统 中 , 流 电动 机 变 频 调 速 逐 在 交
步 取 代直 流 电 动机 , 为 电力 拖 动 系统 的发 展 方 向 。 成
调 速方 式 。 速 的机 械 特 性 不 如 直 流 电 动 机 。 在 上 个 世 纪 中 调 期 以 前 , 流 电动 机 调 速 得 到 较 广 泛 的 应 用 , 交 流 电 力 拖 直 而 动 主要 用 于恒 定 转 速 系 统 。 但 是 直 流 电 动 机 结 构 复 杂 , 在 存
磁 通 基 本 也 不 变 , 据 公 式 ( ) 知 , 流 异 步 电 动 机 的输 根 2可 交
入 电压 要 随 着 频 率 大 小 而 同 步对 应 调 整 。
流 电 动机 变 极 调 速 或 变 频 调 速 等 , 比 采用 机 械 传 动 结 构 进 要 行 变 速 的效 率 高 。交 流 异 步 电动 机 采 用 变 极 调 速属 于有 级 的
关 键 词 异 步 电动机 : 变压 变频调 速 ; 真 仿
0 引言
在 以往 许 多 电 力 拖 动 的 机 械 系 统 中 , 要 变 速 运 行 。采 需
交流异步电动机变频调速设计

交流异步电动机变频调速设计异步电动机是目前工业中最常用的一种电动机,广泛应用于各个领域。
异步电动机的调速是为了满足不同工况下的要求,提高电机的效率和运行稳定性。
变频调速是目前常用的一种调速方法,可以灵活调节电机的转速和负载。
异步电动机变频调速的基本原理是通过改变电机的供电频率和电压来实现调速。
传统的调速方法是通过改变电源电压来实现调速,但是这种方法的调速范围有限,效果也不好。
而变频调速可以通过改变电源的频率来实现调速,调速范围广,效果好。
异步电机的变频调速系统主要由变频器、电机和控制系统组成。
变频器是用来改变电源的频率和电压的设备,可以根据实际需要灵活调节电机的转速和负载。
控制系统是用来控制变频器的工作状态和参数的,可以根据实际需要设置电机的转速和负载要求。
在异步电机的变频调速设计中,需要考虑以下几个方面:1.变频器的选择:变频器是异步电机变频调速的关键设备,需要选择合适的变频器。
在选择变频器时,需要考虑电机的功率、转速范围和负载要求等因素,以确定变频器的额定功率和频率范围。
2.变频器参数的设置:根据实际需要设置变频器的工作参数,如频率、电压、转速等。
这些参数的设置要根据电机的特性和负载要求来确定,以保证电机的运行稳定性和效率。
3.电机的选型:根据实际需要选择合适的异步电机。
在选择电机时,需要考虑电机的功率、转速范围和负载要求等因素,以确定电机的额定功率和转速范围。
4.控制系统的设计:控制系统是异步电机变频调速的核心部分,用于控制变频器的工作状态和参数。
控制系统需要根据实际需要设计合适的控制算法和参数,以实现电机的准确控制和调速要求。
5.系统的稳定性和安全性:异步电机变频调速系统需要保证系统的稳定性和安全性。
在设计过程中,需要考虑各种故障情况的处理和保护措施,以确保系统的可靠性和安全性。
通过以上几个方面的设计,可以实现异步电动机的变频调速,提高电机的效率和运行稳定性。
异步电动机变频调速在工业领域有着广泛的应用前景,可以适应不同工况下的要求,提高生产效率和降低能耗。
基于matlab的交流异步电机变频调速运行设计

基于matlab的交流异步电机变频调速运行设计
交流异步电机是一种常见的电动机,它可以通过变频调速运行来实现转速控制。
在MATLAB中,我们可以使用Simulink来
进行交流异步电机的变频调速运行设计。
以下是一个基于MATLAB的交流异步电机变频调速运行设计
的简单步骤:
1. 创建模型:在MATLAB/Simulink中创建一个新的模型。
2. 添加组件:通过拖拽、双击等方式添加交流异步电机模型、PID控制器、变频器等组件到模型中。
3. 连接组件:使用连线工具将组件连接起来,包括将PID控
制器的输出连接到变频器的输入,将变频器的输出连接到交流异步电机模型的输入等。
4. 参数设置:根据实际需求,设置各个组件的参数,包括PID
控制器的比例、积分、微分系数,变频器的输出频率等。
5. 仿真运行:在Simulink中点击运行按钮,进行仿真运行。
通过观察仿真结果,可以评估交流异步电机的转速控制性能。
6. 优化调试:根据仿真结果,对PID控制器参数、变频器输
出频率等进行优化调试,以达到所需的转速控制效果。
需要注意的是,具体的设计步骤和方法可能因实际情况而有所不同。
在实际应用中,还需要考虑电机的额定功率、转矩特性、电压、电流等因素,并结合电机的特性曲线进行调试和优化设计。
三相异步电动机变频调速控制系统设计
三相异步电动机变频调速控制系统设计一、引言三相异步电动机广泛应用于工业生产中,以其结构简单、制造成本低、容量大、耐用等优点而受到青睐。
然而,传统的电动机调速方式并没有很好地满足各种应用场景的需求。
变频调速系统是一种能够根据不同需求实现高效调速的解决方案。
本文将介绍三相异步电动机变频调速控制系统的设计方案,包括系统的原理、硬件设计、软件设计及性能测试等内容。
二、系统原理系统主要由以下几个部分组成:1.变频器:负责将输入的电源交流电转换为可调的电压和频率,供给电动机使用。
变频器通常包括整流器、逆变器和滤波器等电路。
2.控制电路:包括信号输入、测量电路、调速逻辑电路等。
其中,信号输入模块负责接收用户的控制信号;测量电路负责测量电动机的转速和电流等参数;调速逻辑电路负责根据用户控制信号和测量参数计算出变频器的控制信号。
3.电机驱动:负责将变频器输出的电压和频率传送给电动机,驱动电动机工作。
三、硬件设计硬件设计包括电路的选型和布局。
其中,变频器的选型需要考虑电源电压和频率、电机额定参数、控制精度等因素。
控制电路的设计需要选择合适的传感器和控制芯片,保证调速系统的稳定性和性能。
硬件布局上,需要合理布置各个电路模块,使得信号传输和功率传输互不干扰。
同时,还需考虑防护措施,确保系统的安全性。
四、软件设计软件设计主要包括控制算法和用户界面设计。
控制算法根据用户的设定值和实际测量值,计算出变频器的控制信号。
控制算法一般采用闭环控制方法,包括PID控制、模糊控制等。
用户界面设计可采用上位机软件,通过图形界面实现对调速系统的设置和监控。
五、性能测试为了验证系统设计的可行性和性能,需要进行性能测试。
性能测试包括静态特性测试和动态特性测试。
静态特性测试主要是测量系统的静态输出特性,如电机的转速、电流和功率等。
动态特性测试则是模拟实际工况下的负载变化情况,测试系统的动态响应和稳定性。
六、总结三相异步电动机变频调速控制系统的设计方案包括系统原理、硬件设计、软件设计和性能测试四个方面。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
湖南工程学院应用技术学院毕业设计说明书目:题专业班级:号:学学生姓名:完成日期:指导教师:评阅教师:2011 年 6 月院术学学院应用技湖南工程务任书(论文)毕业设计设计(论文)题目:交流异步电机的调速控制系统设计姓名专业班级学号指导老师职称教研室主任一、基本任务及要求:主要设计完成可控硅交流调压调速系统的设计,主要完成:(1)交流调压调速的原理和调压调速的静、动态性能分析;(2)系统组成与工作原理;(3)主电路与控制电路设计;(4)元器件选型及参数计算;(5)软件设计;(6)系统应用与调试说明。
二、进度安排及完成时间:(1)第一至第三周:查阅资料,撰写文献综述和开题报告。
(2)第四周至第五周:毕业实习。
(3)第六周至第七周:交流调压调速的原理和调压调速的静、动态性能分析。
(4)第八周至第九周:系统组成与工作原理;主电路与控制电路设计。
(5)第十周至第十二周:元器件选型及参数计算;软件设计;系统应用与调试说明。
(6)第十三周至第十五周:撰写毕业设计论文。
(7)第十六周:毕业设计答辩目录摘要 .................................................................. . (I)ABSTRACT ............................................................ .. (II)第1章绪论 (1)1.1 变频调速技术简介 .................................................11.2 变频器的发展现状和趋势 (2)1.2.1 变频器的发展现状 .............................................21.2.2 变频器技术的发展趋势 .........................................21.2 研究的目的与意义 .................................................31.3 本次设计方案简介 (4)1.3.1 变频器主电路方案的选定 .......................................41.3.2 系统原理框图及各部分简介 .....................................51.3.3 选用电动机原始参数 ...........................................6第2章交流异步电动机变频调速原理及方法 (7)2.1 三相异步电机工作的基本原理 (7)2.1.1 异步电机的等效电路 ..........................................72.1.2 异步电动机的转矩 ............................................92.1.3 异步电动机的机械特性 ........................................92.1.4 异步电机变频调速原理 .......................................102.2 变频调速的控制方式及选定 ........................................112.2.1 压频比恒定控制 .............................................112.2.2 其它控制方式 ...............................................16第3章变频器主电路设计 (18)3.1 主电路的工作原理 .................................................183.1.1 主电路各部分的设计 ..........................................183.1.2 变频器主电路设计的基本工作原理 ..............................203.2 主电路参数计算 ...................................................223.3 IGBT及驱动模块介绍 ...............................................223.3.1 IGBT简介及驱动要求 (22)3.3.2 EXB840的内部结构 (24)3.3.3 采用EXB840的IGBT驱动电路 (26)第4章控制回路设计 (27)4.1 驱动电路设计 .....................................................274.1.1 SPWM调制技术简介 (27)4.1.2 SPWM波生成芯片特点和引脚功能 (29)4.1.3 SA4828内部结构及工作原理 (30)4.2 保护电路 .........................................................324.2.1 过、欠压保护电路设计 (32)4.2.2 过流保护设计 ................................................344.3 控制系统的实现 ...................................................34第5章变频器软件设计 (37)5.1 流程图 ...........................................................375.2 SA4828的编程 .....................................................385.2.1 初始化寄存器编程 ............................................385.2.2 控制寄存器编程 ..............................................40第6章系统应用与调试说明 (49)6.1交流电动机模型与MATLAB实现 .......................................496.1.1交流电动机与交流调速系统介绍 (49)6.1.2交流电动机调速原理 (49)6.1.3交流电动机模型在Malab中的实现 (49)6.2异步电机调压调速系统与MATLAB 实现 ................................536.2.1异步电机调压调速原理 (53)6.2.2异步电机调压调速的闭环控制系统 (54)6.2.3 基于转速负反馈控制异步电机调压调速系统的MATLAB 实现 (54)6.3异步电动机变频调速系统与MATLAB 实现 ..............................556.3.1异步电动机变频调速系统介绍 (55)6.3.2变频调速控制方式 (55)6.3.3 矢量控制变频调速仿真 ........................................56结论 .................................................................. (60)参考文献 (61)致谢 .................................................................. (62)湖南工程学院毕业设计(论文)交流异步电动机变频调速系统设计交流电机变频调速及其相关技术的研究己成为现代电气传动领域的一个近年来,摘要:并且随着新的电力电子器件和微处理器的推出以及交流电机控制理论的发重要课题,展,交流变频调速技术还将会取得巨大进步。
产生原理进行了研究,在此基础上设计了一本文对变频调速理论,逆变技术,SPWM为控制核心,SA4828SPWM变频调速系统,以8051控制专用集成芯片种新型数字化三相整流电路采用二极管,的驱动电路,EXB840构成IGBTIGBT采用作为主功率器件,同时采用可使功率因数接近1,并且只用一级可控的功率环节,电路结构比较简单。
V恒控制,同时,软件程序使得参数的输入和变频器运本文在控制上采用f 行方式的改变极为方便,新型集成元件的采用也使得它的开发周期短。
另外,本文对SA4828三相SPWM波发生器的使用和编程进行了详细介绍,完成了整个系统控制部分的软硬件设计。
V控制;SA4828波形发生器变频调速;正弦脉宽调制;关键字:fI湖南工程学院毕业设计(论文)AC INDUCTION MOTOR SPEED-ADJUSTED SYSTEM DESIGN Recently, the research of variable frequency speed variation of AC motor and :ABSTRACTthe with in electrical drive field, relevant technology has become an important issueappearance of new power electron apparatus and microprocessor and the development of themore improve speed variation will control theory, the technology of variable frequencyrapidly.This thesis has a research on these technologies: Variable V oltage Variable Frequency motor drive, inverter, and the creation principle of SPWM, Based on the results of the study, Iuses system. It drive digital three phases VVVF motor of designed a system a new IGBT as power device, controlled by 8051 as main controlling core, it usesASIC-SA4828power makes converting circuit unit, which as and uses EXB840 as drive. It uses diodesfactor close to 1. Because I only need to control inverter, the whole circuit is very simple.V operation. At the same time, it of I adopt the means linear is very convenient to finput parameters or change the drive's operating mode due to the software procedure. Moreover, owing to the advantages of the new integrated parts, it costs less time to developthis motor drive.This thesis has also detail introduced the method of the usage and the programs of the three phases SPWM wave generator SA4828. The software and the hardware of the controlpart in system have been completed.V ,,Sine Pulse Width Modulation (SPWM) variable frequency speedcontrol Keywords:foperation; SA4828 Wave GeneratorII交流异步电动机变频调速系统设计第1章绪论1.1 变频调速技术简介变频调速技术是一种以改变交流电动机的供电频率来达到交流电动机调速目的的技术。