雷达舰操图
船用雷达的操作和使用

4、海浪抑制的调整
按出海浪抑制(A/C SEA)旋钮,并 慢慢右旋,海浪杂波表现为零碎的小点, 以便使隐藏在海浪杂波里的小目标能识别 到,之后,可将按下旋钮锁定。
一般经验是使得船顺风一侧的海浪 杂波消失,迎风一侧的海浪杂波变小些。
第六章 船用导航雷达的操作使用
三、目标的测量
(一)目标距离的测量 1、利用固定距标圈粗略估测目标的距离
2、利用“+”字游标测量目标的距离
使“+”字游标的中心与回波内侧相重
3、利合用“VRM”精确测量目标的距 离 使“VRM”圈与回波内侧相切
第六章 船用导航雷达的操作使用
三、目标的测量
(二)目标方位的测量
1、利用“+”字游标测量估测目标的方位
使“+”字游标的中心与回波中心相重 合,从CRT底部中间读出目标的方位
2、利用“EBL”精确测量目标的方位
将“+”字游标的中心与回波中心相重 合,按一次“EBL”,使电子方位线在 回波中心,从CRT左下角读出方位。
测报格式:× ×号目标,方位(右舷或 左舷) × × × 度,距离× × × 海里。
第六章 船用导航雷达的操作使用
雷达关机
1、关闭所有打开的功能; 2、将“增益”(GAIN)反时针旋转到底; 3、按“TX/OFF”按键,关闭发射; 4、同时按下“POWER/OFF”和 “TX/ 5、切O断F整F流”器键电,源关或闭船雷电达。电源;
海浪控制 抑制 海浪引起的杂波
增益 调整接收 机的增益
Anti-Clutter Sea,通过减小 近距离目标增益实现的 (R≤4nm)
适当调整增益,可提高目 标分辨力
第六章 船用导航雷达的操作使用
雷达标绘

幻灯片1雷达标绘●雷达标绘与作图的用途●通过雷达标绘与作图,可以充分发挥雷达在避碰中的作用,确保船舶在能见度不良时的安全航行。
在避碰中雷达标绘与作图有如下作用:●能获得碰撞危险的早期警报;●能准确获得两船的最近会遇距离和会遇时间;●可精确求得来船的航向和航速;●可求出本船有效的避让措施;可判断来船的行动及双方避让行动是否有效。
幻灯片2碰撞案例分析幻灯片3碰撞案例分析●碰撞危险判断:幻灯片8舰操绘算图●使用舰操绘算图作相对运动图,具有标绘迅速、方便等优点。
图上印有等距离圈、方位圈、比例尺及对数比例尺等,可以直接使用。
幻灯片9一、求来船的运动要素(航向与航速)●作出本船航向线。
●根据两次观测得来的来船的方位和距离,在舰操绘算图上标出第一次的A点和第二次的C点,连接AC并延长。
如果两次观测的时间间隔为t,则相对运动速度,相对运动方向为矢量。
●根据我船的航向和航速,过A点作我船航向的反航向线,截取(V0为我船的航速),连接BC,则矢量即为来船的航向和航速。
BC的长度为来船在时间间隔t内的航程,来船航速为。
将矢量平移至原点O,在方位圈上读取的度数即为来船的航向。
幻灯片10一、求来船的运动要素(航向与航速)●例题1:设本船真航向010°,航速12节,雷达观测来船回波资料如下:●1030真方位050°,距离8.′0海里●1040真方位049°,距离6.′5海里●求来船的航向和航速。
●解:(参见图9—3)●作出本船航向线。
●在舰操图上分别标出A点(050°,8.′0)和C点(049°,6.′5),连接A点和C点得相对运动线AC。
●过A点作本船航向的反航向线AB,AB等于我船在时间t(t=1min)内的航程,即海里。
●连接BC,量得BC=1.4海里,则来船航速节;将BC平移至原点O,得来船航向为321°。
幻灯片11一、求来船的运动要素(航向与航速)幻灯片12二、求最近会遇距离与会遇时间(DCPA和TCPA)●由图9—2可知,是相对运动线,即●它是判断会遇最近距离及到达会遇最近的时间的重要依据。
船载雷达真机实操(1)
雷达基本操作与设置
评估时间:(每人不超过5分钟)
评估要求:(此项评估需在真实雷达设备上进行,操作、回答基本正确,方可及格。
此项评估合格后方可进行后继评估。
)
一、调整雷达状态
1、雷达开机前的准备。
(口述)
2、正确开机,核实传感器数据、并调整到最佳观测状态。
(实操)
3、指出雷达主要旋钮的名称、作用和使用方法:海浪干扰抑制、雨雪干扰抑制。
(口述+实操)
4、正确关机。
(实操)
二、测量物标位置
1、根据评估员指定的物标,准确测量该物标的距离。
(实操)
2、根据评估员指定的物标,准确测量该物标的方位。
(实操)。
舰操图 习题集
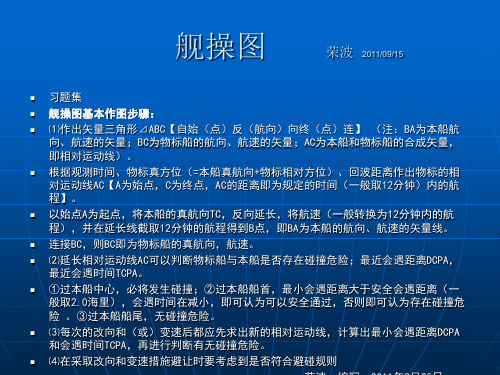
思考题4
本船雾中航行,真航向120°,航速10节,雷达测得来船真方位与 距离如下: 0800 140°-------9.0′ 0806 139°-------7.5′ 0812 138°-------6.0′ 此时本船右转,稳定在150°新航向上,于0818测得来船真方位 130°,距离4.75海里,若来船保向保速,试作相对运动图并求取: ⑴来船的航向、航速和本船转向后DCPA,TCPA。 ⑵为保持2.0海里通过,何时恢复航向? 答案:⑴TC=359°,V=7.2节 ⑵DCPA=2.6′,TCPA=0832 ⑶0828恢复原航向
例) 本船的TC=000°,V=12节,雷达测得回波数据如 下: 时间 TB D 0800 050° 11.0′ 0806 050° 9.5′ 0812 050° 8.0′ 0818本船停船避让,本船的停车冲车为1.5′,历 时12分钟,问本船停住后的DCPA为多少? 答案:DCPA=3.5′;他船过本船船首时间:0844
例题3
例题3 (P170) 本船TC=000°,V=12节,雷达测得他船的回波如 下: 时间 TB D 0800 050° 8.0′ 0806 050° 6.5′ 0812 050° 5.0′ 0812他船向右改向30°,0818本船又减速一半, 则:两船采取行动后的DCPA为多少?本船何时恢 复原航向,使他船从本船前方2.0海里通过? 答案:DCPA=3.4′;恢复原航向时间:0826.5
例题8
例题8 (P176) 已知本船雾中行驶,TC=100°,V=12节,雷达测得A、B两船数据如下: 时间 A船 B船 1012 140°---11.0′ 210°----4.0′ 1018 140°----9.0′ 210°----4.0′ 1024 140°----7.0′ 210°----4.0′ 1024时,A船用VHF告诉本船,他改向至010°,航速不变,12分钟后, 本船发现与A船会遇距离过小,遂向右改向40°,设B船保向保速。求: ⑴A船的原航向、航速; ⑵两船改向后,本船与A船的DCPA和TCPA; ⑶本船与A船到达最近会遇距离时,B船的方位与距离; 答案:⑴A船原航向358°;原航速:13.5节; ⑵DCPA=2.0′,TCPA=1043.5 ⑶B船的方位210°,距离2.9′
雷达标绘

幻灯片1雷达标绘●雷达标绘与作图的用途●通过雷达标绘与作图,可以充分发挥雷达在避碰中的作用,确保船舶在能见度不良时的安全航行。
在避碰中雷达标绘与作图有如下作用:●能获得碰撞危险的早期警报;●能准确获得两船的最近会遇距离和会遇时间;●可精确求得来船的航向和航速;●可求出本船有效的避让措施;可判断来船的行动及双方避让行动是否有效。
幻灯片2碰撞案例分析幻灯片3碰撞案例分析●碰撞危险判断:幻灯片8舰操绘算图●使用舰操绘算图作相对运动图,具有标绘迅速、方便等优点。
图上印有等距离圈、方位圈、比例尺及对数比例尺等,可以直接使用。
幻灯片9一、求来船的运动要素(航向与航速)●作出本船航向线。
●根据两次观测得来的来船的方位和距离,在舰操绘算图上标出第一次的A点和第二次的C点,连接AC并延长。
如果两次观测的时间间隔为t,则相对运动速度,相对运动方向为矢量。
●根据我船的航向和航速,过A点作我船航向的反航向线,截取(V0为我船的航速),连接BC,则矢量即为来船的航向和航速。
BC的长度为来船在时间间隔t内的航程,来船航速为。
将矢量平移至原点O,在方位圈上读取的度数即为来船的航向。
幻灯片10一、求来船的运动要素(航向与航速)●例题1:设本船真航向010°,航速12节,雷达观测来船回波资料如下:●1030真方位050°,距离8.′0海里●1040真方位049°,距离6.′5海里●求来船的航向和航速。
●解:(参见图9—3)●作出本船航向线。
●在舰操图上分别标出A点(050°,8.′0)和C点(049°,6.′5),连接A点和C点得相对运动线AC。
●过A点作本船航向的反航向线AB,AB等于我船在时间t(t=1min)内的航程,即海里。
●连接BC,量得BC=1.4海里,则来船航速节;将BC平移至原点O,得来船航向为321°。
幻灯片11一、求来船的运动要素(航向与航速)幻灯片12二、求最近会遇距离与会遇时间(DCPA和TCPA)●由图9—2可知,是相对运动线,即●它是判断会遇最近距离及到达会遇最近的时间的重要依据。
舰操图题库及答案

1.某轮真航向030°,航速10节,雷达测得来船真方位与距离如下:时间真方位距离0800 050° 7´.00806 046º 5´.70812 040º 4´.0试求;(1)来船运动要素,DCPA, TCPA 及会遇情况。
(2)0816来船的方位,距离(3)来船接近4´.0时的时间和方位(4)来船过某船船首的时间,方位和距离答案:(1)来船的TC=295°,V=8´,DCPA=2´.1,TCPA=0830(2) TB=034°,距离为3´.7(3)time=0814 ,TB=036 °(4)time=0818,距离为3´.42.本船真航向270°,航速9´,雷达测得A,B,C三船的相对方位和距离数据如下:A船 B船 C船时间方位距离方位距离方位距离0404 000° 10´.2 022° 4´.0 270° 1´.50410 000° 8´.2 024° 3´7 285° 1´.60416 000° 6´.4 026° 3´4 299° 1´.7试判断出各船运动要素,DCPA和运动态势答案:(1)A船TC=090° V=10´ DCPA=0.0,当头对驾驶(2)B船TC=270° v=6´ DCPA=1´.5 同向追越船(3)C船TC=270° V=13´DCPA=1´.5 同向追越船(4)time=0818,距离为3´.43.本船真航向000°,雾中航速9节,雷达测得来船的真方位余距离如下:时间方位距离0800 045° 7´.00806 045° 6´.00812 045° 5´.0试求:(1)为让来船从本船左弦2´.0最近距离通过,预定0815向右改向,应改驶什么新航向?(2)为让来船从本船前2´.0最近距离通过,预定0815减速,应改驶什么新航速?(3)如预定于来船相距4´.5时改向,让让船从本船左弦2´.0最近距离通过,则应驶什么航向?答案:(1)本船TC=059°(2)本船新航速=2´.8 (3)本船TC=052°4.本船雾中航行,真航向120°,航速10´,雷达测得来船的真方位与距离如下:时间方位距离0800 140° 9´.00806 139° 7´.50812 138° 6´.0此时本船右转,稳定在150°新航向上,于0818测得来船的真方位130°,距离4´.75,若来船保向保速,试作相对运动图并求取:(1)来船的航向,航速河本船转向后的DCPA,TCPA(2) 为保持2´通过,何时恢复航向?答案:(1)TC=359° V=7´.2(2)DCPA=2´.6 A=0832(3)0828恢复原航向5.雾中航行本船真航向100°,航速9´,雷达测得来船真方位和距离如下:时间方位距离0400 145° 7´.00405 145° 6´.00410 145° 5´.0试求:(1)本船于0415向右改向175°航向,速不变,则DCPA为多少?若欲与来船保持2海里安全驶过让清,何时恢复原航向?(2)若本船与来船接近到3´.5时停车避让,本船停车冲程为1´.0历时9分钟,则DCPA为多少?若欲与本船保持1´.5安全驶过,何时恢复原航向?答案:(1)DCPA=2´.5 0428恢复原航向(2)DCPA=1´.6 0439恢复原航向6.某轮镇真航向220°,雾中航速11节,雷达观测来船真方位与距离如下:时间方位距离0800 240° 11´.00806 240° 9´.00812 240° 7´.00812来船用VHF告诉某轮,他已向右转向30°某轮经判断与来船存在碰撞的危险。
雷达标绘

幻灯片 1雷达标绘●雷达标绘与作图的用途●通过雷达标绘与作图,可以充分发挥雷达在避碰中的作用,确保船舶在能见度不良时的安全航行。
在避碰中雷达标绘与作图有如下作用:●能获得碰撞危险的早期警报;●能准确获得两船的最近会遇距离和会遇时间;●可精确求得来船的航向和航速;●可求出本船有效的避让措施;可判断来船的行动及双方避让行动是否有效。
幻灯片2碰撞案例分析幻灯片3碰撞案例分析●碰撞危险判断:SHAPE \*MERGEFORMAT幻灯片8舰操绘算图●使用舰操绘算图作相对运动图,具有标绘迅速、方便等优点。
图上印有等距离圈、方位圈、比例尺及对数比例尺等,可以直接使用。
幻灯片9一、求来船的运动要素(航向与航速)●作出本船航向线。
●根据两次观测得来的来船的方位和距离,在舰操绘算图上标出第一次的A点和第二次的C点,连接AC并延长。
如果两次观测的时间间隔为t,则相对运动速度,相对运动方向为矢量。
●●根据我船的航向和航速,过A点作我船航向的反航向线,截取(V0为我船的航速),连接BC,则矢量即为来船的航向和航速。
BC的长度为来船在时间间隔t内的航程,来船航速为。
将矢量平移至原点O,在方位圈上读取的度数即为来船的航向。
幻灯片10一、求来船的运动要素(航向与航速)●例题1:设本船真航向010°,航速12节,雷达观测来船回波资料如下:●1030真方位050°,距离8.′0海里●1040真方位049°,距离6.′5海里●求来船的航向和航速。
●解:(参见图9—3)●作出本船航向线。
●在舰操图上分别标出A点(050°,8.′0)和C点(049°,6.′5),连接A点和C点得相对运动线AC。
●过A点作本船航向的反航向线AB,AB等于我船在时间t(t=1min)内的航程,即海里。
●●连接BC,量得BC=海里,则来船航速节;将BC平移至原点O,得来船航向为321°。
幻灯片11一、求来船的运动要素(航向与航速)幻灯片12二、求最近会遇距离与会遇时间(DCPA和TCPA)●由图9—2可知,是相对运动线,即●它是判断会遇最近距离及到达会遇最近的时间的重要依据。
福建船政职院雷达操作与模拟器课件02自动雷达标绘仪(ARPA)-1绪论

SHM
两船保速保向时预计的视运动
VR
B
VT
A(目标)
V0
D
CPA C
DCPA O (本船) 图2-1-1人工标绘图
SHM 两船保速保向时预计的视运动
VR
B
VT
A(目标)
V0
D
CPA C
DCPA O (本船) 图2-1-1人工标绘图
人工标绘进行避碰的步骤
1、选择要进行标绘的相遇船回波(A) 2、监视该目标回波的移动 3、隔一定时间间隔(6min)标出B点 4、作图并求碰撞及航行参数 ① 碰撞参数: DCPA:最接近会遇距离 TCPA:到达最接近点的时间
② 航行参数:
◆目标船相对速度(REL SPD)、相对航向( REL CRS)、真速度(TRUE SPD)和真航向(TRUE CRS) 5、CPA TCPA安全界限值( MINCPA 、 MINTCPA ) ① MINCPA(CPA安全界限值) 允许目标安全通过本船所需要求的最小会遇距 ② MINTCPA(TCPA的安全界限值) 允许目标到达CPA点的最小时间
第一章 绪 论
第一章 绪论
1-1 普通船用雷达用于船舶避碰的局限性 1-2 ARPA系统的组成及各部分作用 1-3 ARPA系统的分类
第一章 教学目的要求
1、掌握普通船用雷达用于船舶避碰的方法 2、充分认识普通船用雷达用于船舶避碰的
局限性 3、了解ARPA的发展概况和基本类型 4、掌握ARPA系统的组成及各部分作用 5、 知道ARPA有哪些输入输出信息
人工标绘的局限性
1)费时(3——7分钟)、麻烦 2)不直观、不准确 3)难以应付复杂局面 2、真运动雷达用于船舶避碰
二、普通船用雷达用于船舶避碰的局限性
雷达操作与模拟器专业培训

(观测值小数点后保留一位)
作图注意事项 (1)用来标绘的回波资料至少应为3次以上的观测所获得 的资料; (2)若标绘所得三船位点不在一直线上,如果时间允许, 可再观测一次,以便核查误差所在或判断来船是否采取了 某种行动,若排除后者的可能性,可进行误差处理; (3)切线的选择。圆外一点向圆作切线有两条,主要是根 据本船所采取的避让行动是向左转向还是向右转向; (4)允许误差。角度:±5° 速度:±2kn 时间:±1min
T.M.L
B VT
V0
A
O (本船)
T VR
R.M.L
一、海上相对运动原理
以本船为参照系,则有速度矢量三角形关系:
VT VR Vo
TB TA AB
式中: VR:来船相对速度矢量 VT:来船真速度矢量 Vo:本船速度矢量
T.M.L
SHM
B VT
V0
A
O (本船)
的记录如下:
观测时间080°
距离
8'.0 6'.5
0112
试求:
077°
5'.0
(1)来船的航速、航速 (2)DCPA,TCPA。
作图方法
(1)先在作图纸上确定本船的位置,记为O1; (2)在O1点上标绘本船航向线; (3)根据本船的航速,在本船航向线上标定本船在不同的 观测时间的船位点,并分别记为O2,O3 ; (4)根据本船在不同观测时间获得的本船的回波方位与距 离,分别以各观测船位点为基点标绘来船的船位,并分别记 为T1,T2 ,T3; (5)连接T1,T3点,矢量T1T3的方向为他船的真航向,长度 为他船在T1,T3两观测点时间间隔(12min)内的航程,并将 其转换成来船的航速。来船的航向TC= ,V= ;
雷达标绘评估标准的确立与完善

雷达标绘评估标准的确立与完善尹相达【摘要】在探讨雷达标绘评估标准确立的必要性的基础上,比较研究国内几所高校评估标准的优点与不足,并尝试提出一套较为完善的雷达标绘评估标准.【期刊名称】《航海教育研究》【年(卷),期】2010(027)003【总页数】3页(P58-60)【关键词】雷达标绘;评估标准;比较研究【作者】尹相达【作者单位】青岛远洋船员学院,航海系,山东,青岛,266071【正文语种】中文【中图分类】U676.2雷达标绘(plotting)是以一定的时间间隔标注物标回波的距离和方位,以求得来船的航向、航速、CPA、TCPA,从而判断是否存在碰撞危险的一种方法。
雷达标绘不仅可以判断两船是否存在碰撞危险,而且还可以核查避让行动的有效性,直到碰撞危险过去为止。
在雷达标绘评估系统中,评估结果将受到雷达使用者的水平、观测结果的正确性、多物标时对重点目标的选择的正确性、学员做舰操图的误差以及船舶操纵性能等多种因素的影响,因而建立一套切实可行而又公平合理的评估标准显得尤为重要。
具体评分标准如下:(1)舰操图考试40分,及格分数为24分;(2)航向误差<±5°正确,±5°≤误差< ±10°扣1分,±10°≤误差< ±15°扣2分,误差≥±15°扣3分;(3)航速误差<±1 kn正确,±1 kn≤误差<±2 kn扣1分,±2 kn≤误差<±3 kn扣2分,误差≥±3 kn扣3分;(4)CPA误差<±1 n mile正确,±1 n mile≤误差<±2 n mile扣1分,±2 n mile≤误差< ±3 n mile扣 2分,误差≥±3 n mile扣3分;(5)避让目标船新航向、新航速评分标准同(2)(3)中航向、航速;(6)要求15分钟完成以上所有任务,每增加一分钟扣一分,超过20分钟不及格;(7)真矢量和相对矢量混淆不及格,重点船选错不及格。
《雷达标绘》幻灯片

§8、双物标的标绘
一、作图原那么
1、重点船的判断: 当多物标标绘时,首要的原那么是重点船的
判断。判断时应综合考虑DCPA,TCPA,以及 来船与本船的距离等因素。
2、关键: 本船对重点船的避让措施应移至其他物标进
展计算或判断,本船的措施幅度对其他物标而言 如果不够,那么应加大措施幅度。
二、例子:以右前和左前双物标作图为例
〔6〕判断1〕来船过本船首过/尾过 —— 相对运动 线
2〕最近会遇点在左舷
309º
pT15节 p0
p
o1
பைடு நூலகம்
o3 o2
L3
o'
L2 L1
3
经标绘:DCPA=1.25n mile
TCPA=0131
§6、雷达相对运动作图
一、作图原理
1、原理: 本船固定于一点,为参照系,那么来船相
对位置标绘在雷达运动纸上。
2、关键: 本船相对静止,本船速度反向叠加在来船
上。
二、作图方法:
1、方法口诀:自始返航向终连。
2、目的:求取标绘6个目的。
〔1〕求相对运动线:判断是否存在碰撞危险
* AC的延长线即为相对运动线,其会进入本船的最 小平安距离圈〔通常设置为2´〕者即判定存在碰撞 危险,否那么,即不存在碰撞危险。
5′.0
二、作图方法:
〔1〕确定一点〔本船点〕,画本船航向、航程。
〔2〕在各观测点上标绘出来船的相应位置点。
〔3〕求得来船运动要素 V
如图来船航向TC=L1L2
速度V =L1L2
〔4〕同理可以求出本船及来船未来某个时间的位置 及相对关系,如O4,L4
〔5〕求来船与本船的相对关系,即双方运动势态。
雷达试操船操作方法

雷达试操船操作方法一、雷达设备的基础知识雷达设备是一种基于雷达原理实现的电子设备,用于测量目标物体的距离、方向和相对速度等参数。
雷达设备主要由雷达控制器、雷达天线、显示器等组成,下面分别介绍这些部分的功能:1. 雷达控制器雷达控制器是雷达设备的主控制部分,用于控制雷达的发射和接收信号,以及对接收的信号进行处理和显示。
控制器通常包括发射器、接收器、信号处理器等模块。
2. 雷达天线雷达天线主要用于发射和接收雷达信号,它可以通过旋转或者升降来改变信号的覆盖范围和方向。
雷达天线的高度和角度也会影响信号的传播和接收效果。
3. 雷达显示器雷达显示器用于显示雷达航行数据、目标跟踪信息等相关信息。
显示器通常具有纵向和横向两个显示模式,可以根据需要进行切换。
二、雷达航行雷达航行是指通过雷达设备来实现船只的导航和航行,主要涉及以下几个步骤:1. 确定雷达航行范围首先需要根据船只的航行情况和雷达设备的特点,选择合适的雷达航行范围。
一般来说,雷达航行范围会根据船舶的载重量、航行区域、航行速度和天气条件等因素来确定。
2. 调整雷达参数根据船只的航行情况和雷达设备的特点,需要调整雷达参数,包括雷达频率、功率、天线角度等参数。
这些参数的调整将影响雷达信号的传输和接收效果。
3. 监测雷达显示器在航行过程中,需要时刻监测雷达显示器上显示的航行数据和目标信息,以及关注船只的周围环境和水文气象条件。
如果发现异常情况,需要及时调整船只航行方向和速度,以确保航行安全。
三、雷达目标跟踪雷达目标跟踪是指通过雷达设备来实现对目标物体的跟踪和定位,主要涉及以下几个步骤:1. 发现目标物体首先需要通过雷达设备来扫描周围环境,尝试发现目标物体。
如果发现目标物体,需进一步确定目标物体的位置、速度和方向等参数。
2. 目标锁定一旦确定目标物体的位置和参数,需要将雷达设备锁定在目标物体上,以确保能够对其进行持续跟踪和监测。
3. 监测目标位置和移动在目标物体锁定后,需要时刻监测其位置和移动情况,并对其进行持续跟踪。
《雷达操作》幻灯片

三、有关杂波抑制的控钮
1.海浪干扰抑制〔Anti-Clutter Sea 或 Sea-Echo Suppression〕:
〔Sencitivity Time Contor——STC〕 6 ~ 8 n mile 2.雨雪干扰抑制〔Anti-Clutter Rain/Snow〕 :
distortion is inevitable.
EBL
Ring (6 Total)
Fig. Range & bearing measurement
Range: 12 nm
180 Radar
picture
Periphery of CRT
第四章 船用雷达的操作
第四章 船用雷达的操作
第一节 控钮符号作用及操作要点
一、有关电源的开关
1.船电闸刀〔Ships Power Switch〕:合上驱潮、维 护断开 2.雷达开关〔Radar Power Switch〕 :Off-Stand-
二、O3.n天有线关开图关象〔质Sc量an的ne控r P钮ower 或 Antenna Power 〕:
一1.亮般度无〔Brilliance Tube 或 Intensity Sweep〕:扫描 线刚好看不见 2.调谐〔Tuning 或 Tune〕:1〕指示最大;2〕图象最 饱满、清晰 3.增益〔Gain 或 Sensitivity〕:噪声斑点刚好可见 4.脉冲宽度〔Pulse Length Selector〕:选择长、中、
90°
Own ship
Target 245°
Island
Chart
270
form
Δt=123.5μs 0 Scan direction
雷达舰操图课件(2024版)

D
O
C
A
B
A’
第10题
第11题
E
M P
B
A
C D
A’’ A’
O
M1 P1
B1 A1(C1,D1)
A1’
第12题
P
B1
A1(C1,D1)
A1’
D C C’
B A
A’
B2 A2
C2
C B
B1 A
C1 A1
第13题
A
B
C
D E
C1
E1
A1
D1
B1
第14题
A
A1 A1’
C
A’ B
C1 B1
M’
M
P P’
NP
O
M
O1
D
C
B
A A’
第4题
解题步骤:
第一问: 1) 算出本船在该时间段(12Min)内的 矢量长度OO1。描点、并连接得相对运 动线AC,自始反航向钟连得BC ,BC为来 船的真矢量。
2)0818:本船右转,过B点做BA’,BA’= BA+40°=160°,连接A’C,A’C为0818 后的来船相对本船的相对运动线。
第二问: 过D点做DE的平行线A’’C,交AB与点
A’’,BA’’为我船应改驶的新航速, BA’’=2.8kn。
第三问: 过D1点(AC与4.5海里圆的交点)作
2海里圆的切线D1E1,过C点做D1E1的 平行线A’’’C,以B点为圆心,以BA为半 径画弧,交A’’’C与点A’’’, BA’’’为我船应 改驶的新航向,BA’’’=052°。
第15题
第16题
P E
D C
B
雷达舰操绘算方法教程

雷达舰操绘算方法教程
雷达舰操绘是一种模拟雷达操作算法的高级工程技术,它得益于雷达系统的关键技术,可以准确高效地提供大范围内的空间分布信息。
雷达舰操绘的关键是采用一种特殊的参数分
析技术,使用一系列的算法,进行量化和数学运算,可以从多个观测系统中收集到反射谱
数据,以计算雷达舰在不同方向上的振动特性,并使用经过提高的算法,以确定最佳的雷
达舰操绘算法。
首先,我们必须考虑到雷达舰操绘的第一个步骤是使用相关性分析技术来计算反射谱数据
的特性,即使用接收频率密度和总反射功率密度来评价反射谱数据的特性。
然后,运用一
系列的数学算法,可以实现从反射谱数据提取空间分布信息。
通常采用特定的傅里叶变换、高斯函数和多边形曲面解算性能限制计算,从而实现“连续”探测和识别,有效地实现雷达
舰操绘。
此外,雷达舰操绘还需要考虑因地形和气象条件而引起的外来信号,以及推测舰船的最佳
航线,以进行最佳的航行追踪。
为此,采用一系列算法,并结合地球物理学原理,可以测
量出天空的地形特性,并考虑海拔和气象差异,从而最大限度地消除多普勒效应,有效地实现雷达舰操绘。
综上所述,雷达舰操绘是一种复杂而精密的模拟技术,它利用反射谱数据,结合地球物理学原理以及一系列数学算法,最终实现高精度雷达数据处理和分析,并运用特定算法判断
最佳的雷达舰操绘算法。
舰操图习题

第三部分雷达标绘习题1.本船雾中航行,航向350°,航速10kn,雷达观测他船数据如下:时间T 方位B 距离R1400 285°7.5′1406 282° 6.5′1412 278° 5.5′求他船的航向、航速?2.本船雾中航行,航向030°,航速10kn,雷达观测他船数据如下:时间T 方位B 距离R0800 050°7.0′0806 046° 5.7′0812 040° 4.5′求:(1)他船的航向、航速、DCPA、TCPA?(2)0816时来船的方位、距离?3.本船雾中航行,航向230°,航速8kn,雷达观测他船数据如下:时间T 方位B 距离R0800 290°7.6′0815 283° 6.0′0830 273° 4.6′求他船的航向、航速、DCPA、TCPA?4.本船雾中航行,航向060°,航速8kn,雷达观测他船数据如下:时间T 方位B 距离R1500 080°7.0′1508 080° 6.0′1516 080° 5.0′(1)求他船的航向、航速?(2)本船1516转向使他船从本船左舷3′处通过,求本船新航向?5.本船雾中航行,航向030°,航速10kn,雷达观测他船数据如下:时间T 方位B 距离R1100 060°11.0′1106 060°9.0′1112 060°7.0′(1)求他船的航向、航速?(2)若本船于1115向右转向30°避让,求转向后的DCPA、TCPA?6.本船雾中航行,航向120°,航速9kn,雷达观测他船数据如下:时间T 方位B 距离R1006 160°11.4′1012 160°10.2′1018 160°9.0′(1)求他船的航向、航速?(2)若本船于1028向右转向30°避让,求转向后的DCPA、TCPA?7.本船雾中航行,航向220°,航速8kn,雷达观测他船数据如下:时间T 方位B 距离R0800 220°9.0′0806 218°7.5′0812 216° 6.0′(1)求他船的航向、航速、DCPA、TCPA?(2)若本船于0816向右转向60°避让,求转向后的DCPA、TCPA?8.本船雾中航行,航向030°,航速10kn,雷达观测他船数据如下:时间T 方位B 距离R1000 050°7.0′1006 046° 5.7′1012 040° 4.5′(1)求他船的航向、航速、DCPA?(2)求他船过本船船首的时间、距离、方位?9.本船雾中航行,航向355°,航速15kn,雷达观测他船数据如下:时间T 方位B 距离R1140 055°8.0′1146 055°7.0′1152 055° 6.0′本船于1152开始改驶新航向035°,并减半速航行,1158时稳定在新航向上和新航速7.5kn,此时他船回波真方位049°,距离5′(1)求他船的航向、航速及采取行动后的DCPA、TCPA?(2)求1158时刻他船的相对运动航向?10.本船雾中航行,航向185°,航速12kn,雷达观测他船数据如下:时间T 方位B 距离R0830 220°10.0′0836 219.5°8.5′0842 219°7.0′(1)求他船的航向、航速、DCPA、TCPA?(2)本船于0846时刻向右转向30°避让,求本船转向后与他船的DCPA?(3)若本船与他船保持DCPA=2海里通过,何时可以恢复原航向?11.本船雾中航行,航向220°,航速11kn,雷达观测他船数据如下:时间T 方位B 距离R1000 240°11.0′1006 240°9.0′1012 240°7.0′本船于1015时减速一半,1021时他船向右转向30°(1)求他船的原航向、航速?(2)求双方采取措施后的DCPA、TCPA?12.本船雾中航行,航向120°,航速9kn,雷达观测他船数据如下:时间T 方位B 距离R1006 150°11.0′1012 150°9.5′1018 150°8.0′本船于1024时向右转向20°,此时他船也向右转向20°求双方采取措施后的DCPA、TCPA?13.本船雾中航行,航向000°,航速6kn,雷达观测他船数据如下:时间T 方位B 距离R1200 020°12.0′1205 020°11.0′1210 020°10.0′本船于1210时向右转向35°,并增速至12kn(1)求他船的航向、航速?(2)求转向变速后的DCPA、TCPA?14.本船雾中航行,航向090°,航速12kn,雷达观测他船数据如下:时间T 方位B 距离R0800 120°9.0′0810 120°7.0′0820 120° 5.0′(1)求他船的航向、航速?(2)0820本船向右转向30°,若使他船以DCPA为3海里通过,本船须减速到多少?(3)求转向变速后他船的TCPA?15.本船雾中航行,航向000°,航速10kn,雷达观测他船数据如下:时间T 方位B 距离R0800 050°10.0′0806 049°8.0′0812 048° 6.0′(1)求他船的航向、航速、DCPA、TCPA?(2)本船于0815时向右转向避让,若使他船的DCPA为2海里通过,求本船新航向?(3)若本船于0815时采取保向减半速避让,求与他船的DCPA?16.本船雾中航行,航向190°,航速8kn,雷达观测他船数据如下:时间T 方位B 距离R0800 122°10.0′0810 122°8.0′0820 122° 6.0′本船于0820时减速为4kn,0831减速为2kn,0837时停车?(1)求他船的原航向、航速?(2)求他船过本船船首向的时间和距离?17.本船雾中航行,航向090°,航速12kn,雷达观测他船数据如下:时间T 方位B 距离R0800 120°10.0′0806 122°8.0′0812 125° 6.0′(1)求他船的原航向、航速、DCPA、TCPA?(2)0815本船得知他船改驶新航向342°,求此时与他船的DCPA、TCPA?(3)0815本船为避让他船立即改驶新航向130°,求此时的DCPA、TCPA?18.本船雾中航行,航向090°,航速12kn,雷达观测他船数据如下:时间T 方位B 距离R2030 120°9.0′2040 120°7.0′(1)求他船的航向、航速?(2)本船于2055时向右转向30°,若使DCPA=2′通过,本船还须减速到几节?19.本船雾中航行,航向120°,航速10kn,雷达观测他船数据如下:时间T 方位B 距离R2000 140°9.0′2006 139°7.5′2012 138° 6.0′此时本船右转,稳定在新航向150°上,并于2018时测得来船的真方位130°,距离5′,若来船保向保速,试作相对运动图求:(1)来船的航向、航速和本船转向后的DCPA、TCPA?(2)为保持2海里通过,何时恢复原航向?20.本船雾中航行,航向030°,航速15kn,雷达观测他船数据如下:时间T 方位B 距离R1610 320°10.0′1614 320°8.5′1618 320°7.0′若本船停车冲程为1.5海里,冲时为12分钟,求本船何时停车才能使他船在相距2海里穿越本船前方?21.本船雾中航行,航向300°,航速9kn,雷达观测他船数据如下:时间T 方位B 距离R2000 000°11.0′2006 359°9.5′2012 358°8.0′本船欲于2024时以最近会遇距离3′驶过,求应如何改向?与此同时,发现来船向左改变航向,结果致使来船相对航向线不变,继续逼近,求来船改向到多少度?22.本船雾中航行,航向170°,航速12kn,雷达观测他船数据如下:时间T 方位B 距离R1400 198.5°12.0′1406 198°10.5′1412 197°9.0′(1)求来船航向、航速、DCPA、TCPA?(2)本船距来船8.5′处改向至200°,若来船保向保速,当本船见来船回波真方位为170°时恢复原航向,求此时DCPA和TCPA?23.本船雾中航行,航向000°,航速22kn,雷达观测他船数据如下:时间T 方位B 距离R0100 040°10.0′0106 040°8.5′0112 040°7.0′求:(1)当来船距本船4海里时,本船从22kn减速到8kn,不计冲程,求DCPA?(2)如果考虑冲程,其冲程为1.83海里,冲时9分钟,求DCPA?24.本船雾中航行,航向070°,航速15kn,雷达观测他船数据如下:时间T 方位B 距离R0806 090°12.0′0818 090°8.0′(1)本船于0818时开始减速,4分钟后稳定在新航速上,若0822时他船的真方位仍为090°,距离7.5海里若使DCPA=2′,求本船新航速?(2)若他船保速,0834他船真方位仍为090°,求他船转向多少?(3)0834本船停车避让,冲程1′,时间10分钟,求DCPA、TCPA25.本船雾中航行,航向280°,航速10kn,雷达观测他船数据如下:时间T 方位B 距离R2000 330°11.0′2006 328°9.0′2012 325°7.0′(1)求他船的航向、航速、DCPA?(2)本船于2016时得知他船改驶新航向165°,求此时的DCPA?(3)若本船在与他船相距5海里时向右转向,使DCPA=2海里通过,求本船新航向?26.本船雾中航行,航向100°,航速9kn,雷达观测他船数据如下:时间T 方位B 距离R0430 145°7.0′0435 145° 6.0′0440 145° 5.0′(1)本船于0445向右转向走175°避让,保持DCPA=2′通过,求本船何时可以恢复原航向?(2)若本船保向,当与他船相距3.5海里时停车避让,冲程为1海里,冲时为9分钟,若保持最近会遇距离为1.5海里通过,求本船何时可以恢原航速?雷达标绘习题答案1.他船航向061°、航速8.2kn2.(1)航向295°,航速8kn,DCPA=2.1′,TCPA=0830;(2)方位034°距离3.7′3.他船航向186°、航速10kn、DCPA=2.9′、TCPA=09004.(1)他船航向350°、航速2.7kn;(2)本船新航向101°5.(1)他船航向265°、航速12.5kn;(2)转向后DCPA=1.4′、TCPA=11316.(1)他船航向028°、航速7.8kn;(2)转向后DCPA=1.9′、TCPA=10577.(1)他船航向056°、航速7.5kn、DCPA=1.3′、TCPA=0833;(2)转向后DCPA=3.5′、TCPA=08318.(1)航向295°航速8kn、DCPA=2.1′;(2)时间1018距离3.4′方位030°9.(1)航向314°、航速13.2kn、DCPA=4′TCPA=1210;(2)相对航向283°10.(1)航向096°、航速9kn、DCPA=0.4′、TCPA=0910;(2)转向后DCPA=2.3′;(3)0902恢复原航向11.(1)他船航向079°、航速11kn;(2)采取措施后DCPA=2.4′TCPA=103812.采取措施后DCPA=2.3′TCPA=104813.(1)他船航向218°、航速6.7kn;(2)DCPA=2.8′、TCPA=124114.(1)他船航向016°、航速6kn;(2)新航速6.6kn;(3)TCPA=084315.(1)航向262°,航速16kn,DCPA=0.55′,TCPA=0830;(2)051°;(3)DCPA=1.716.(1)航向262°、航速11.7kn(2)过船首向的时间0847、距离3.0′17.(1)航向319°、航速10kn、DCPA=1.3′、TCPA=0829;(2)DCPA=0.4′、TCPA=0832;(3)DCPA=1.5′、TCPA=082818.(1)航向015°、航速6kn;(2)本船须减速到9节19.(1)航向359°、航速7.2kn、DCPA=2.6′、TCPA=2032;(2)2028时恢复原航向20.(1)162321.本船改向到012°,来船改向到182°22.(1)航向075°,航速8kn,DCPA=0.8′,TCPA=1436;(2)新DCPA=2.5′,TCPA=142723.(1)DCPA=3.6′;(2)DCPA=3.0′24.(1)本船新航速6kn;(2)他船左转25°;(3)DCPA=0.9′、TCPA=090225.(1)航向188°、航速17.5kn、DCPA=1.65′;(2)DCPA=0.1′;(3)345°26.(1)0457;(2)0509。
利用“EBL”和“VRM”进行“雷达标绘”

利用“EBL”和“VRM”进行“雷达标绘”
汪如涛
【期刊名称】《世界海运》
【年(卷),期】1998(021)006
【摘要】传统的在舰操图上进行的人工雷达标绘法,因其过程繁琐,耗时长,影响了望。
本文提出的利用“EBL”和“VRM”在雷达荧光屏上进行的雷达标绘法,因其简便实用,精度可靠等特点,因而具有相当高的实用价值。
【总页数】1页(P18)
【作者】汪如涛
【作者单位】青岛远洋运输公司
【正文语种】中文
【中图分类】U675.74
【相关文献】
1.利用案例推理(CBR)方法对雷达图像进行土地利用分类 [J], 黎夏;叶嘉安;廖其芳
2.利用空间相关性进行天气雷达波束阻挡数据的识别和订正 [J], 黄兴友;马雷;杨敏;印佳楠;刘燕斐
3.利用shearlet变换对探月雷达数据进行月壤结构的重建 [J], 张领;刘财;胡斌;张泽强;徐晨阳;曾昭发;王德利;徐懿
4.利用边缘技术探测进行激光布里渊散射雷达频移分析 [J], 邓怀勇
5.利用边缘技术探测进行船载激光布里渊散射雷达频移分析 [J], 李桂波;王枚
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
M O
P
F
ED C
B
A
精品文A档’
第6题
O
B
CD M
P
A’
C’
A
精品文档
C
D E
A A’
B
P
S1 F1
E1
K1
D1 C1
A1
I H
A1’ B1
第7题
精品文档
A1
B1
C1
D1 E1
M M1 P
O
A1’ C
ED
A C’ C’ C ’’’’ C
B
O
第9题
精品文档
B1
A1
2)DM/TMD=A’C/12; TMD=10Min; TM=0818+10=0828。
O
O1
P
M
D C
B
A
精品文A档’
第5-1题
解题步骤: 第一问: 1) 算出本船在该时间段(10Min)内的 矢量长度OO1。描点、并连接得相对运 动线AC,自始反航向钟连得BC ,BC为来 船的真矢量。
2)
第5-2题
3)单方位距离定位,找到来船在0818 时相对本船的位置点D,过D点做A’C的 平形线PD.过O点作OP垂直DP,OP为来 船得DCPA。
DCPA=2.6’。
4)PD/TPD=A’C/12 TPD=14Min TCPA=0818+TPD=0818+14min=0832
第二问:
1)本船恢复原航向后,来船相对本船的 相对运动线为AC,作//AC并与2海里圆 相切的切线MN交PD于点M,即点M 为本 船恢复原航向的时间点。
A1’
C1’
D1 C1
M1
P1 N1
P M
D
O
C
A
B
A’
第10题
精品文档
第11题
E
M P
B
A
C D
A’ A ’ ’
O
M1 P1
B1 A1(C1,D1)
A1’
精品文档
第12题
P
B1
A1(C1,D1)
A1’
D C C’
B A
A’
精品文档
B2 A2
C2
C B
B1 A
C1 A1
精品文档
第13题
A
B
C
D E
C1
E1
A1
D1
B1
第14题
精品文档
A
A1 A1’
C
A’ B
C1 B1
M’
M
P P’
第15题
精品文档
第16题
P E
D C
B
A” A A’
精品文档
T1
O1
C
O
A B
第17题
精品文档
第18题
A A’
C D
B
A1
’’
P
A1
C1
A1’
D1
P1
B1
P0
精品文档
第19题
G1 F1
E1
H1 I1
D1 C1
精品文档
NP
O
M
O1
D
C
B
A A’
精品文档
第4题
解题步骤: 第一问: 1) 算出本船在该时间段(12Min)内的 矢量长度OO1。描点、并连接得相对运 动线AC,自始反航向钟连得BC ,BC为来 船的真矢量。
2)0818:本船右转,过B点做BA’,BA’= BA+40°=160°,连接A’C,A’C为0818 后的来船相对本船的相对运动线。
第二问:
过D点做DE的平行线A’’C,交AB与点 A’’,BA’’为我船应改驶的新航速, BA’’=2.8kn。
第三问:
过D1点(AC与4.5海里圆的交点)作 2海里圆的切线D1E1,过C点做D1E1的 平行线A’’’C,以B点为圆心,以BA为半 径画弧,交A’’’C与点A’’’, BA’’’为我船应 改驶的新航向,BA’’’=052°。
E E1
O1
O
C D1 D
A A’
A ’’ ’’ A’
B
第3题
解题步骤: 第一问:
1) 算出本船在该时间段(10Min)内的 矢量长度OO。描点、并连接得相对运动 线AC,自始反航向钟连得BC ,BC为来船 的真矢量。
2)0815:来船相对本船位置为D点, CD/5=AB/10,得CD=2mile。延长AC至点 D,使CD=2mile。 3)过D点做2海里圆切线DE,并过C点做 DE的平行线A’C,以B点为圆心,BA为 半径,画弧交A’C与A’点,BA’为我船应 改驶的新航向,BA’=059°。
C1’
B1
A1
A1’
D C
B
A
A’
精品文档
E
A’
A
C D
B
P2
P1
D1 C1
A1 B1
精品文档
第20题