理论力学第七版十四章2PPT课件
合集下载
理论力学 ppt课件
相对运动:动点相对于动系的运动。
相对速度用
vr
;
牵连运动:动系相对于静系的运动。
牵连速度用
ve
;
二、牵连速度的概念:牵连点的速度; 牵连点: 1、瞬时量;
2、在动系上;
三、点的速度合成定理:
3、与动点相重合的那一点;
四、用速度合成定理解题的步骤:
A、选取动点和动系:注意动点必须与动系有相对运动,
FN
FN'
rW 且知F '
fsR
max
rW R
代入上式
F1min
1 a
(FN'
b
Fmax c)
F1min
Wr ( aR
b fs
c)
ppt课件
FOy FOx
F’N
F1 F’max
19
[练2] 结构如图,AB=BC=L,重均为P,A,B处为铰链,
C处靠在粗糙的铅垂面上。平衡时两杆与水平面的夹角均为α,
方向:
R
aa
ae
ωαB
避开 ar ,向垂直于 ar 的方向投影得
aRen
M
ar
aa cos aan sin aC ae
求:C处的摩擦系数fS=?
FAx
A
P
解:1)分析整体
M
A
0,
FNC
2L sin
2P
L 2
cos
0
2)分析BC
FAy
α α
B
FNC
C
Fmax
P
FBy FBx
M
B
0,
FNC
L
sin
Fmax
L
cos
《理论力学课件》PPT课件
1、物体的受力分析:分析物体(包括物体系)受哪些力, 每个力的作用位置和方向,并画出物体的受力图。
2、力系的等效替换(或简化):用一个简单力系等效代替 一个复杂力系。 3、力系的平衡条件:建立各种力系的平衡条件,并应用这 些条件解决一些工程实际问题 。
.
14
在各种工程中,都有大量的静力学问题。 起重机
8
上课时主动思考,跟上教学进度。尽量不缺课。
按时独立做好布置的作业,作业中的图要画清楚,算式 要写清楚。
要做大量的习题和思考题。
.
9
2 在学习中遇到困难怎么办?
阅读相关教材和习题解答 找老师答疑 答疑时间: 答疑地点:
发送电子邮件 Email: cyliu@
访问扬州大学理论力学教学网 /course2/lllx
.
7
理论力学的学习方法
1 如何学好理论力学
学习理论力学必须深刻地反复地理解它的基本概念和公 理或定律
要透彻理解由基本概念、公理或定律导出的定理和结论, 以及由这些定理和结论引出的基本方法,它们是理论力 学的主要内容。
掌握抽象化的方法,理论联系实际,要逐步培养把具体 实际问题抽象成为力学模型的能力
.
但是这种变形,往往非常小,在研究平衡问题以及研究力与运 动变化关系的问题时,可以完全忽略。因此在理论力学中,通 常我们假设所处理的对象均为刚体。
.
21
§0-3 结构的构件与分类
工程结构:由工程材料制成的构件,按合理方式组成为能支承 荷载,传递力,起骨架作用的整体或某一部分。 构件按几何特征可分为三类:杆、板壳、块体
理论力学课件
扬州大学水利科学与工程学院
.
1
绪论
*理论力学的研究对象和内容 *学习目的和学习方法 *教学参考书
2、力系的等效替换(或简化):用一个简单力系等效代替 一个复杂力系。 3、力系的平衡条件:建立各种力系的平衡条件,并应用这 些条件解决一些工程实际问题 。
.
14
在各种工程中,都有大量的静力学问题。 起重机
8
上课时主动思考,跟上教学进度。尽量不缺课。
按时独立做好布置的作业,作业中的图要画清楚,算式 要写清楚。
要做大量的习题和思考题。
.
9
2 在学习中遇到困难怎么办?
阅读相关教材和习题解答 找老师答疑 答疑时间: 答疑地点:
发送电子邮件 Email: cyliu@
访问扬州大学理论力学教学网 /course2/lllx
.
7
理论力学的学习方法
1 如何学好理论力学
学习理论力学必须深刻地反复地理解它的基本概念和公 理或定律
要透彻理解由基本概念、公理或定律导出的定理和结论, 以及由这些定理和结论引出的基本方法,它们是理论力 学的主要内容。
掌握抽象化的方法,理论联系实际,要逐步培养把具体 实际问题抽象成为力学模型的能力
.
但是这种变形,往往非常小,在研究平衡问题以及研究力与运 动变化关系的问题时,可以完全忽略。因此在理论力学中,通 常我们假设所处理的对象均为刚体。
.
21
§0-3 结构的构件与分类
工程结构:由工程材料制成的构件,按合理方式组成为能支承 荷载,传递力,起骨架作用的整体或某一部分。 构件按几何特征可分为三类:杆、板壳、块体
理论力学课件
扬州大学水利科学与工程学院
.
1
绪论
*理论力学的研究对象和内容 *学习目的和学习方法 *教学参考书
理论力学精品课程第十四章 动能定理

d(1 2mivi2)Wi
dTWi
质点系动能的增量,等于作用于质点系全部力所作的元功的
和
微分形式。
T2T1 Wi
质点系在某一段运动过程中动能的改变量,等于作用于质点
系全部力所作功的和
积分形式。
第十四章 动能定理
3. 理想约束
dr
F′ O
F
B A
W F d r F d r 0
第14章 动能定理
※ 力的功 ※ 质点和质点系的动能 ※ 动能定理 ※ 势力场·势能·机械能守恒定律 ※ 功率·功率方程·机械效率 ※ 质点系普遍定理的综合应用 ※ 结论与讨论
第十四章 动能定理
§14-1 力的功
a. 常力的功
WFcoss
F
M
M1
M2
S
功是代数量,其国际单位制为 J(焦耳)。
d1
dt
1,
d1
dt
1
Ⅱ M2
1(M1M i122) (J1iJ1222)
主动力的功:
W 12M 11M 2 2(M 1M i122)1
由动能定理得: 1 2(J1iJ1 222) 1 20(M 1M i12 2) 1
第十四章 动能定理
Ⅰ M1
driC
d
Mi
C
§14-2 质点和质点系的动能
质点的动能
T 1 mv 2 2
动能和动量都是表征机械运动的量,前者与质点速度的平 方成正比,是一个标量;后者与质点速度的一次方成正比,是 一个矢量,它们是机械运动的两种度量。动能与功的量纲相同 ,也为 J 。
质点系的动能
第十四章 动能定理
T
b. 变力的功
第十四章理论力学PPT教学课件
2、运动分析:
虚位移(按虚
速度对应法分析);
rrBA
BP AP
3、建立动力学关系:虚位移原理;
F A δrAF B δrB0
4、求解:
FAFBtan
2020/12/12
13
例14-2
已知:如图所示曲柄压榨机构中,M=50Nm,
OA=r,
BD=DC=ED=l, ; A
若杆重均不计、
B
忽略各处摩擦, E
W F r
(2)集中力偶的虚功: W M
2)约束力:
(1)光滑面、光滑铰链、固定端等约束力的功:
2020/12/12
s
F
做功均为零;
8
(2)滑动摩擦力的功: A、静滑动摩擦力的功:为零; 如:只滚不滑;
Fs
B、动滑动摩擦力的功:不为零; 4、理想约束:
1)做功为零的约束称为理想约束:光滑面、光滑铰 链、静滑动摩擦力等;
且机构在图示 求位:置求平压衡榨.力 P。
o M
D C
P
2020/12/12
14
PPT教学课件
谢谢观看
Thank You For Watching
15
第十四章 虚位移原理
虚位移原理 一种用动力学的原理求解静 力学问题的方法;
§14-1 约束 · 虚位移 · 虚功
一、几个基本概念:
1、自由度:空间物体在三维空间内自由运 动的程度;
2、完全自由的物体在三维空间内的自由度:
2020/12/12
1
完全自由的物体在空间可以沿三根独立的坐标
轴做移动运动、同时还可以绕三根坐标轴做转动运
故,非完全自由的物体的自由度为:6-约 束方程的个数。
理论力学说课PPT课件
机械运动实例
总结词
机械运动是理论力学的传统应用领域,涉及 各种实际机械系统的运动规律。
详细描述
机械运动是理论力学中最为常见的应用领域 之一。各种实际机械系统,如汽车、飞机、 机器和机器人等的运动规律,都需要通过理 论力学进行分析和描述。通过研究机械运动, 可以深入理解力矩、动量、动能等力学概念, 以及它们在机械系统中的具体应用。
自我评价
通过本课程的学习,我掌握了理论力 学的基本知识和分析方法,对物理学
的理解更加深入
我认为自己的逻辑思维、抽象思维和 创新能力得到了提高,解决问题的能 力也有所增强
建议
建议增加一些与实际应用相关的案例 和实验,以更好地理解理论力学的应 用价值
对于一些较难理解的概念和公式,希 望能够有更多的解释和练习题
详细描述
力的分析方法包括矢量表示法、直角坐标表示法和极坐标表 示法等。通过力的合成与分解,可以确定物体运动状态的变 化。力矩的计算则涉及到转动惯量、角速度和动量矩等概念 。
运动分析方法
总结词
运动分析方法主要研究物体运动轨迹、速度和加速度等参数。
详细描述
运动分析方法包括对质点和刚体的运动学分析,通过求解运动微 分方程或积分方程,可以确定物体的运动轨迹、速度和加速度等 参数。这些参数对于理解力学系统的运动规律和相互作用至关重 要。
本课程总结
提高了学生解决实际问题的能力 改进方向
针对不同专业需求,调整教学内容和深度,更好地满足学生需求
本课程总结
01
加强实验和实践环节,提高学生 的动手能力和实践经验
02
引入更多现代技术和方法,更新 教材和教学方法,保持课程的前 沿性
力学发展历程与展望
力学发展史
哈尔滨工业大学 第七版 理论力学.14
将 FI 值代入,得
m2 g )l sin ϕ − FI l cos ϕ = 0 2
ω2 =
2m1 + m2 g tan ϕ 2m1 (a + l sin ϕ )
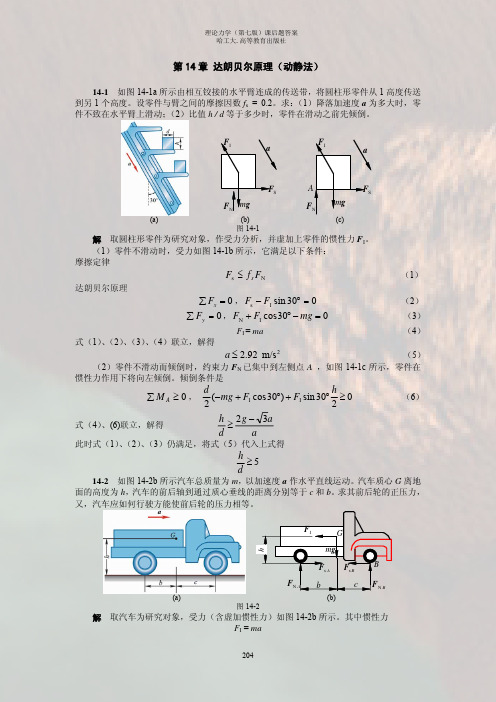
14-5 曲柄滑道机械如图 14-5a 所示,已知圆轮半径为 r,对转轴的转动惯量为 J,轮上 作用 1 不变的力偶 M,ABD 滑槽的质量为 m,不计摩擦。求圆轮的转动微分方程。
∑ M x = 0, M − 2 FI ⋅ l cos ϕ = 0
其中 代入前式得
FI = m ⋅ l sin ϕ ⋅ ω 2
209
理论力学(第七版)课后题答案 哈工大.高等教育出版社
k (ϕ − ϕ 0 ) − 2 ⋅ m ⋅ l sin ϕ ⋅ ω 2 ⋅ l cos ϕ = 0
ω=
k (ϕ − ϕ 0 ) ml 2 sin 2ϕ
y
m2 g 2
FAy
A FI
FAx
x
ϕ
m1 g
(a) 图 14-4
(b)
解
取调速器外壳为研究对象,由对称可知壳与圆盘接触处所受约束力为 FN = m2 g/2
取左圆盘为研究对象,受力如图 14-4b 所示,惯性力为
FI = m1 ⋅ (a + l sin ϕ )ω 2
由动静法
∑ M A = 0, (m1 g +
FI
a
FI
a
FS FN mg
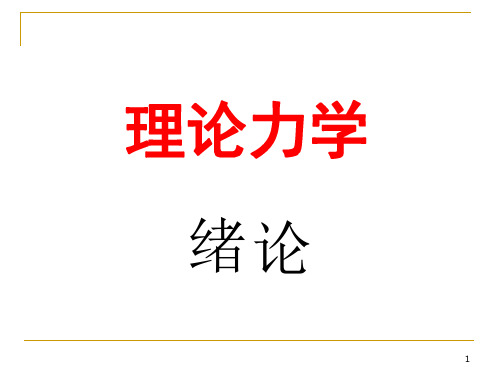
(a) (b) 图 14-1
A FN mg
(c)
FS
解 取圆柱形零件为研究对象,作受力分析,并虚加上零件的惯性力 FI。 (1)零件不滑动时,受力如图 14-1b 所示,它满足以下条件: 摩擦定律
Fs ≤ f s FN
m2 g )l sin ϕ − FI l cos ϕ = 0 2
ω2 =
2m1 + m2 g tan ϕ 2m1 (a + l sin ϕ )
14-5 曲柄滑道机械如图 14-5a 所示,已知圆轮半径为 r,对转轴的转动惯量为 J,轮上 作用 1 不变的力偶 M,ABD 滑槽的质量为 m,不计摩擦。求圆轮的转动微分方程。
∑ M x = 0, M − 2 FI ⋅ l cos ϕ = 0
其中 代入前式得
FI = m ⋅ l sin ϕ ⋅ ω 2
209
理论力学(第七版)课后题答案 哈工大.高等教育出版社
k (ϕ − ϕ 0 ) − 2 ⋅ m ⋅ l sin ϕ ⋅ ω 2 ⋅ l cos ϕ = 0
ω=
k (ϕ − ϕ 0 ) ml 2 sin 2ϕ
y
m2 g 2
FAy
A FI
FAx
x
ϕ
m1 g
(a) 图 14-4
(b)
解
取调速器外壳为研究对象,由对称可知壳与圆盘接触处所受约束力为 FN = m2 g/2
取左圆盘为研究对象,受力如图 14-4b 所示,惯性力为
FI = m1 ⋅ (a + l sin ϕ )ω 2
由动静法
∑ M A = 0, (m1 g +
FI
a
FI
a
FS FN mg
(a) (b) 图 14-1
A FN mg
(c)
FS
解 取圆柱形零件为研究对象,作受力分析,并虚加上零件的惯性力 FI。 (1)零件不滑动时,受力如图 14-1b 所示,它满足以下条件: 摩擦定律
Fs ≤ f s FN
理论力学知识点ppt课件
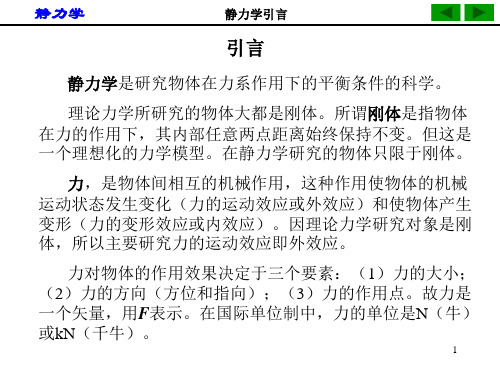
图 (a)
图 (b)
图 (c)
6
静力学
第一章 静力学公理和物体的受力分析
由此可见,对于刚体来说,作用其上力的三要素是:力的 大小、方向和作用线。此时,力是一个滑动矢量。
公理3 力的平行四边形法则
作用于物体上同一点的两个力,可以合成一个合力。合力 的作用点仍在该点,其大小和方向由这两个力为边构成的平行 四边形的对角线来确定。如图(a)所示。即
பைடு நூலகம்
FR=F1+F2
也可以由力的三角形来确定合力的大小和方向,如图 (b)(c )。
图(a)
图(b)
7
图(c)
静力学
第一章 静力学公理和物体的受力分析
推论 三力平衡汇交定理
作用于刚体上三个相互平衡的力,若其中任意两个力 的作用线汇交于一点,则第三个力的作用线必交于同一点, 且三个力的作用线在同一平面内。
5
静力学
第一章 静力学公理和物体的受力分析
由此公理可以导出下列推论: 推论 力的可传性
作用于刚体上某点的力,可以沿其作用线移到刚体内 任意一点,并不改变该力对刚体的作用。
证明:刚体上的点A处作用有力F,如图(a)所示。根 据公理2,可在力F的作用线上任取一点B,加上一对平衡 力F1和F2,使其 F=F2 = - F1 ,如图 (b)所示。再根据公 理2,去掉一对平衡力系F和 F1 ,这样只剩下力 F2 = F,如 图 (c )所示,即将力 F沿其作用线移到了点B。
根据力的定义,约束对其被约束物体的作用,实际上就 是力的作用,这种力称为约束力。它的大小是未知的,以后 可用平衡条件求出,但它的方向必与该约束对被约束的物体 所能阻止的位移方向相反。
11
静力学
理论力学(第七版)哈工大高等教育出版社教学课件

图如图(b)所示
取左拱 AC,其受力图如图
(c)所示
系统整体受力图如图 (d)所示
考虑到左拱 AC三个力作用下
平衡,也可按三力平衡汇交定
理画出左拱 AC的受力图,如
图(e)所示
此时整体受力图如图(f) 所示
讨论:若左、右两拱都考 虑自重,如何画出各受力 图?
如图 (g)(h)(i)
例1-5 不计自重的梯子放在光滑水 平地面上,画出梯子、梯子 左右两部分与整个系统受力 图.图(a)
一般不必分析销钉受力,当要分析时,必须把销钉单独 取出.
(3) 固定铰链支座
约束特点:
由上面构件1或2 之一与地面或机架固定而成. 约束力:与圆柱铰链相同 以上三种约束(经向轴承、光滑圆柱铰链、固定铰链支 座)其约束特性相同,均为轴与孔的配合问题,都可称 作光滑圆柱铰链.
固定铰链支座
F
Fy
Fx
i 1
.
.
.
.
.
.
.
.
.
n
FR FRn1 Fn Fi Fi
i1
二.平面汇交力系平衡的几何条件
平衡条件 Fi 0
平面汇交力系平衡的必要和充分条件是:该力系 的力多边形自行封闭.
例2-1
已知:AC=CB,P=10kN,各杆自重不计;
求:CD杆及铰链A的受力.
可用二个通过轴心的正交分力 Fx , Fy 表示.
(2)光滑圆柱铰链
约束特点:由两个各穿孔的构件及圆柱销钉组成,如剪 刀.
光滑圆柱铰链约束
A B
F A
B
约束力:
光滑圆柱铰链:亦为孔与轴的配合问题,与轴承一样,可用 两个正交分力表示.
取左拱 AC,其受力图如图
(c)所示
系统整体受力图如图 (d)所示
考虑到左拱 AC三个力作用下
平衡,也可按三力平衡汇交定
理画出左拱 AC的受力图,如
图(e)所示
此时整体受力图如图(f) 所示
讨论:若左、右两拱都考 虑自重,如何画出各受力 图?
如图 (g)(h)(i)
例1-5 不计自重的梯子放在光滑水 平地面上,画出梯子、梯子 左右两部分与整个系统受力 图.图(a)
一般不必分析销钉受力,当要分析时,必须把销钉单独 取出.
(3) 固定铰链支座
约束特点:
由上面构件1或2 之一与地面或机架固定而成. 约束力:与圆柱铰链相同 以上三种约束(经向轴承、光滑圆柱铰链、固定铰链支 座)其约束特性相同,均为轴与孔的配合问题,都可称 作光滑圆柱铰链.
固定铰链支座
F
Fy
Fx
i 1
.
.
.
.
.
.
.
.
.
n
FR FRn1 Fn Fi Fi
i1
二.平面汇交力系平衡的几何条件
平衡条件 Fi 0
平面汇交力系平衡的必要和充分条件是:该力系 的力多边形自行封闭.
例2-1
已知:AC=CB,P=10kN,各杆自重不计;
求:CD杆及铰链A的受力.
可用二个通过轴心的正交分力 Fx , Fy 表示.
(2)光滑圆柱铰链
约束特点:由两个各穿孔的构件及圆柱销钉组成,如剪 刀.
光滑圆柱铰链约束
A B
F A
B
约束力:
光滑圆柱铰链:亦为孔与轴的配合问题,与轴承一样,可用 两个正交分力表示.
理论力学完整ppt课件

理论力学
主讲 王卫东
可编辑课件PPT
1
可编辑课件PPT
2
绪
论
一、理论力学的研究对象和内容 二、理论力学发展简史 三、学习理论力学的目的 四、理论力学的研究方法
可编辑课件PPT
3
可编辑课件PPT
真汽 车 碰 撞 仿
4
可编辑课件PPT
5
可编辑课件PPT
6
一、理论力学的研究对象和内容
理论力学——研究物体机械运动规律的科学。
可编辑课件PPT
15
都江堰
岷江上的大型引水枢纽工程,也是现有世界上历史最长的无坝 引水工程。始建于公元前256~前251年。
可编辑课件PPT
16
赵州桥(安济桥)
591~599年,跨度37.4米,采用拱高只有7米的浅拱-敞肩拱,
敞肩拱的运用为世界桥梁史上的首创,并有“世界桥梁鼻祖”
的美誉。
可编辑课件PPT
3 随着科学技术的发展,交叉学科的地位也越来越 重要。力学与其它学科的渗透形成了生物力学、爆 炸力学、物理力学等边缘学科,这就需要我们有坚 实的理论力学基础。
4 培养分析问题、解决问题的方法。
可编辑课件PPT
24
四、理论力学的研究方法
是从实践出发,经过抽象化、综合、归纳、建立 公理,再应用数学演绎和逻辑推理而得到定理和结论, 形成理论体系,然后再通过实践来验证理论的正确性。
17
张衡与地动仪
东汉时期,中国发生地震的次数是比较多的,为了测定地
震方位,及时地挽救人民的生命财产,公元126年,张衡在第二
ቤተ መጻሕፍቲ ባይዱ
次担任太史令之后, 就注意掌握收集地震的情报和记录,经过
多年的潜心研究,终于在公元132年(东汉顺帝阳嘉元年),发明
主讲 王卫东
可编辑课件PPT
1
可编辑课件PPT
2
绪
论
一、理论力学的研究对象和内容 二、理论力学发展简史 三、学习理论力学的目的 四、理论力学的研究方法
可编辑课件PPT
3
可编辑课件PPT
真汽 车 碰 撞 仿
4
可编辑课件PPT
5
可编辑课件PPT
6
一、理论力学的研究对象和内容
理论力学——研究物体机械运动规律的科学。
可编辑课件PPT
15
都江堰
岷江上的大型引水枢纽工程,也是现有世界上历史最长的无坝 引水工程。始建于公元前256~前251年。
可编辑课件PPT
16
赵州桥(安济桥)
591~599年,跨度37.4米,采用拱高只有7米的浅拱-敞肩拱,
敞肩拱的运用为世界桥梁史上的首创,并有“世界桥梁鼻祖”
的美誉。
可编辑课件PPT
3 随着科学技术的发展,交叉学科的地位也越来越 重要。力学与其它学科的渗透形成了生物力学、爆 炸力学、物理力学等边缘学科,这就需要我们有坚 实的理论力学基础。
4 培养分析问题、解决问题的方法。
可编辑课件PPT
24
四、理论力学的研究方法
是从实践出发,经过抽象化、综合、归纳、建立 公理,再应用数学演绎和逻辑推理而得到定理和结论, 形成理论体系,然后再通过实践来验证理论的正确性。
17
张衡与地动仪
东汉时期,中国发生地震的次数是比较多的,为了测定地
震方位,及时地挽救人民的生命财产,公元126年,张衡在第二
ቤተ መጻሕፍቲ ባይዱ
次担任太史令之后, 就注意掌握收集地震的情报和记录,经过
多年的潜心研究,终于在公元132年(东汉顺帝阳嘉元年),发明
14理论力学讲义-第十四讲2004.11.02-20页精选文档

ve
C
A
θ
O’ O
2)选动系(与动点不在同一构件上) 凸轮
3)运动分析系(Va、Ve、Vr) x’ ?
v v v x
a
e
r
退出
vr θ v ve a
vavect gvc3t0 g3v
§9-3 点的速度合成定理
12 12
例9-3: 刨床急回机构如图
所示;曲柄 OA的一端与滑快 A 用铰链联接。当曲柄 OA以匀 角速度ω绕定轴O转动时,滑块 在 摇 杆 O1B 的 槽 中 滑 动 , 并 带 动 摇 杆 O1B 绕 固 定 轴 O1 转 动 。 设 曲 柄 长 OA=r , 两 轴 间 距 离 OO1=L , 求 曲 柄 在 水 平 位 置 的 瞬时,摇杆O1B绕Ol轴转动的角 速度ωl及滑块A对于摇杆O1B的 相对速度。
1)选动点(研究对象:联接点) A(OA上) 2)选动系(与动点不在同一构件上) 摇杆O1B
ωO
va
r
vr
A
3)运动分析系(Va、Ve、Vr)
? ? ve va sin
v v v s 1 a i O n v 1eA e c lro r2s irvs r2 n v va al 2 c orr s2 r2
牵连速度 vr0vave
ve0vavr
§9-3
8 8
点的速度合成定理
点的速度合成定理
动点的绝对速度等于它的牵连速度与相对速度的矢量
和。
vavevr
z
C1
证明:
牵连位移、相对位移、绝
C’
对位移的矢量关系知:
B
CC1CC'C'C1
z’ x’A1 y’
(PPT幻灯片版)理论力学课件
F1
刚体
大小相等 | F1 | = | F2 | 方 向相反 F1 =-F2 (矢量) 且 在同一直线上。
F2
说明:①对刚体来说,上面的条件是充要的; ②对变形体来说,上面的条件只是必要条件。
绳子
F2
平衡
F1
F2 不平衡
F1
F2
绳子
不平衡
F1
对多刚体不成立
理论力学
中南大学土木建筑学院
11
③二力构件:只在两个力作用下平衡的刚体叫二力构件。
中南大学土木建筑学院
57
[例] 画出下列各构件的受力图
D
F2
B
F1
A
FAy FBy FBx B
E
FAx
FCx
C
FCy F2
E
FB
FE
FD F3
G
F3 FC
G FCx
FBy
B
F1 二力构件
F1 二力杆
F2
F2
注意:二力构件是不计自重的。
公理3 加减平衡力系原理
在已知的任意力系上加上或减去任意一个平衡力系, 并不改变原力系对刚体的作用。
理论力学
中南大学土木建筑学院
12
推论1:力的可传性 作用于刚体上的力可沿其作用线移到同一刚体内的任一
点,而不改变该力对刚体的作用效应。
A F B 等效 A F F B F 等效 A F F B F
理论力学
中南大学土木建筑学院
46
理论力学
中南大学土木建筑学院
47
(3)止推轴承(圆锥轴承)
约束特点:止推轴承比径向轴承多一个轴向的位移限制。 约束力:比径向轴承多一个轴向的约束力,亦有三个正
理论力学14

v1+ vr1= v2+ vr2
vr2
A C α M
D
vr1
B
v1
a2
vM
v2
上式沿⊥CD方向投影得
v1 vr1 v2 vr 2
v1cosα + vr1sin α =v2 vr1=(v2-v1cosα )/ sin α
ar2
A C α M
D B
ar1
a2
(2) 求加速度,牵连运动为平动。则: ae1=a1=0 , ar1 沿AB,则 aM=ar1 动系AB:
vr2
A C
α D
M
vr1 vM v2
B
v1
a2
vr2
A C α M
D
vr1
B
v1
a2
vM
v2 解:设动点为交点M, 分别取AB和CD为动系, 地为定系。 (1) 求速度
ve1=v1 , vr1 沿AB,则 vM v1 vr1 动系AB: ve2=v2 , vr2 沿CD,则 vM v2 vr 2 动系CD:
2
习题: 5.9,5.10,5.11,5.12,
5. 如图示,已知 h、 、ω和 , 求小园 环M的绝对加速度。
O
M
h
B
解: (1) 动点: 园环 M , 定系: 地面 , 动系: OB。 (2) 运动分析
相对运动: 直线运动 绝对运动: 直线运动 牵连运动: 定轴转动 (3) 速度分析 vM
aen r
2 2
其中, a e 0
a rn r 2
a C 2r
将上式沿CA方向投影:
a r
vr2
A C α M
D
vr1
B
v1
a2
vM
v2
上式沿⊥CD方向投影得
v1 vr1 v2 vr 2
v1cosα + vr1sin α =v2 vr1=(v2-v1cosα )/ sin α
ar2
A C α M
D B
ar1
a2
(2) 求加速度,牵连运动为平动。则: ae1=a1=0 , ar1 沿AB,则 aM=ar1 动系AB:
vr2
A C
α D
M
vr1 vM v2
B
v1
a2
vr2
A C α M
D
vr1
B
v1
a2
vM
v2 解:设动点为交点M, 分别取AB和CD为动系, 地为定系。 (1) 求速度
ve1=v1 , vr1 沿AB,则 vM v1 vr1 动系AB: ve2=v2 , vr2 沿CD,则 vM v2 vr 2 动系CD:
2
习题: 5.9,5.10,5.11,5.12,
5. 如图示,已知 h、 、ω和 , 求小园 环M的绝对加速度。
O
M
h
B
解: (1) 动点: 园环 M , 定系: 地面 , 动系: OB。 (2) 运动分析
相对运动: 直线运动 绝对运动: 直线运动 牵连运动: 定轴转动 (3) 速度分析 vM
aen r
2 2
其中, a e 0
a rn r 2
a C 2r
将上式沿CA方向投影:
a r
相关主题
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
7
例题:14-3
(3) 虚速度法
定义: vAdrtA, vBdrtB
为虚速度
代入到
F iri0中 ,得
FBvBFAvA0
由速度投影定理,有
vBco s vA si,n
代入上式,
得 FAFBtan
8
例题:14-4
如图所示机构,不计各构件自重与各处摩擦,
求: 机构在图示位置平衡时,主动力偶矩M与主动 力F之间的关系。(15-11d2)
You Know, The More Powerful You Will Be
13
结束语
感谢聆听
不足之处请大家批评指导
Please Criticize And Guide The Shortcomings
讲师:XXXXXX
XX年XX月XX日
14
第十四章 虚位移原理
1
例题:14-2
图中所示结构,各杆自重不计,在G点作用一铅直
向上的力F,
A C C C E C D D B G G lE
求:支座B的水平约束力。
2
例题:14-2
解:解除B端水平约束,以力FBx 代替,如图 (b)
wF FBxxBFyG0
xB2lcos, yG3lsin
9
例题:14-4
解: 给虚位移 , rc
w F M F r c 0
由图中关系有
ra
re sin
r e O B sh i n,r C r a s h 2 i n
代入虚功方程得
M
Fh
sin2
10
例题:14-4
用虚速度法:
v e O B sh i n, v a v Csh 2 in
代入到 M FCv 0中 ,亦得 M sF i2 nh
代入虚功方程,有
F A corB s F BrB 0
即 FAFBtan
6
例题:14-3
(2) 用解析法。建立 坐标系:
F xx i i F yy i i F zz i i0
有 FBxBFAyA0
xB lc o, syA ls in
xB lsin ,yA lco s
得 FAFBtan
图所示椭圆规机构中,连杆AB长为L,滑块A,B与
杆重均不计,忽略各处摩擦,机构在图示位置平衡。 求:主动力 FA与FB 之间的关系。(09-10-2)
5
例题:14-3
解: (1) 给虚位移 rA,rB,
Firi 0
F A rAF B rB0
由 rBco srAsin( rA,rB 在A,B连线上投影相等)
xB2lsin, yG3lcos
带入虚功方程
F B x 2 lsin F 3 lco s 0
FBx
3 2
Fcot
讨论:坐标系的选取 3
例题:14-2 扩展讨论来自如图在CG间加一弹簧,刚度K,且已有伸长量 0 ,
仍求FBx 。
在弹簧处也代之 以力,如
图(b),其中
FCFGk0 WF0 FBxxBFCyCFGyGFyG0
用建立坐标,取变分的方法,有
M F xC 0
xC h cot BC
xC
h sin 2
解得
M
Fh
sin2
11
例题:14-5
求图所示无重组合梁支座A的约束力。
求:FA
12
写在最后
经常不断地学习,你就什么都知道。你知道得越多,你就越有力量 Study Constantly, And You Will Know Everything. The More
xB2 lc o, syC lsi,nyG 3 lsin
xB 2 lsin, yClc os , yG3 lc os
F B ( 2 l x si k n 0 l co k 0 3 l s c o F 3 l c so 0 s
解得 FBx2 3Fcotk0cot
4
例题:14-3
例题:14-3
(3) 虚速度法
定义: vAdrtA, vBdrtB
为虚速度
代入到
F iri0中 ,得
FBvBFAvA0
由速度投影定理,有
vBco s vA si,n
代入上式,
得 FAFBtan
8
例题:14-4
如图所示机构,不计各构件自重与各处摩擦,
求: 机构在图示位置平衡时,主动力偶矩M与主动 力F之间的关系。(15-11d2)
You Know, The More Powerful You Will Be
13
结束语
感谢聆听
不足之处请大家批评指导
Please Criticize And Guide The Shortcomings
讲师:XXXXXX
XX年XX月XX日
14
第十四章 虚位移原理
1
例题:14-2
图中所示结构,各杆自重不计,在G点作用一铅直
向上的力F,
A C C C E C D D B G G lE
求:支座B的水平约束力。
2
例题:14-2
解:解除B端水平约束,以力FBx 代替,如图 (b)
wF FBxxBFyG0
xB2lcos, yG3lsin
9
例题:14-4
解: 给虚位移 , rc
w F M F r c 0
由图中关系有
ra
re sin
r e O B sh i n,r C r a s h 2 i n
代入虚功方程得
M
Fh
sin2
10
例题:14-4
用虚速度法:
v e O B sh i n, v a v Csh 2 in
代入到 M FCv 0中 ,亦得 M sF i2 nh
代入虚功方程,有
F A corB s F BrB 0
即 FAFBtan
6
例题:14-3
(2) 用解析法。建立 坐标系:
F xx i i F yy i i F zz i i0
有 FBxBFAyA0
xB lc o, syA ls in
xB lsin ,yA lco s
得 FAFBtan
图所示椭圆规机构中,连杆AB长为L,滑块A,B与
杆重均不计,忽略各处摩擦,机构在图示位置平衡。 求:主动力 FA与FB 之间的关系。(09-10-2)
5
例题:14-3
解: (1) 给虚位移 rA,rB,
Firi 0
F A rAF B rB0
由 rBco srAsin( rA,rB 在A,B连线上投影相等)
xB2lsin, yG3lcos
带入虚功方程
F B x 2 lsin F 3 lco s 0
FBx
3 2
Fcot
讨论:坐标系的选取 3
例题:14-2 扩展讨论来自如图在CG间加一弹簧,刚度K,且已有伸长量 0 ,
仍求FBx 。
在弹簧处也代之 以力,如
图(b),其中
FCFGk0 WF0 FBxxBFCyCFGyGFyG0
用建立坐标,取变分的方法,有
M F xC 0
xC h cot BC
xC
h sin 2
解得
M
Fh
sin2
11
例题:14-5
求图所示无重组合梁支座A的约束力。
求:FA
12
写在最后
经常不断地学习,你就什么都知道。你知道得越多,你就越有力量 Study Constantly, And You Will Know Everything. The More
xB2 lc o, syC lsi,nyG 3 lsin
xB 2 lsin, yClc os , yG3 lc os
F B ( 2 l x si k n 0 l co k 0 3 l s c o F 3 l c so 0 s
解得 FBx2 3Fcotk0cot
4
例题:14-3