直流无刷电机制动知识点吐血总结
无刷直流电机运行基本知识与基本控制方法

几个术语解释
T3
T5
T1
D1
D3
D5
Ud
Cd A
B
C
T4
T6
T2
D4
D6
D2
ia
ib
ic
ea
eb
ec
o
3
+
位置传 感器
-
无刷直流电机的组成
B ’
C
V1
V2
AC ’ B
A ’
V3
无刷直 流电机
无刷直流电机组成部分: 电机本体、位置传感器、 电子开关线路;
电机本体在结构上与永磁 同步电动机相似;
0 L M iC eC
7
无刷直流电机的数学模型
u AN R 0 0 iA L M 0
u BN
0
R
0
iB
p
0
LM
0 iA eA uON
0
iB
eB
u
ON
uCN 0 0 RiC 0
0 L M iC eC uON
uON
eAN
eBN
eCN eA
3
eB
13
无刷直流电机的换流模式
T1
t T1
t
T4
t T4
t
T3
t T3
t
T6
t T6
t
T5
t T5
t
T2
t T2
t
0 60 120 180 240 300 360 420
0 60 120 180 240 300 360 420
(1) pwm-on型调制方式 (2)on-pwm型调制方式
14
无刷直流电机的换流模式
3-31直流电动机的制动

五、他励直流电动机四象限运行的 分析方法
见p81图3-35 图
习题:p97
3-37,3-38 思考题:3-16~3-22,3-39~3-42
能耗制动运行(位能性负载运行): 2、能耗制动运行(位能性负载运行):
他励直流电动机拖动位能性负载运行时, 在达到 他励直流电动机拖动位能性负载运行时, 位能性负载运行时 上述零点时(电磁转矩为零), ),由于负载转矩不为 上述零点时(电磁转矩为零),由于负载转矩不为 结果,在负载转矩的作用下, 零,结果,在负载转矩的作用下, 电机开始反转, 电机开始反转,如图 随着转速的升高, 随着转速的升高, E a , I a , T 均逐渐增大, 均逐渐增大,最后和负载转 矩相等时稳定运行, 矩相等时稳定运行,这种 过程叫做能耗制动运行 过程叫做能耗制动运行。
U 机械特性分析: = 0, Φ = Φ N ,这时电动机的机 机械特性分析: 械特性方程式为
Ra + Rc Ra + Rc n=− T =− Ia 2 CeCT Φ N Ce Φ N
是一条过原点的直线, 是一条过原点的直线,如图 在由运行点到停转的制动 过程中,转速并非稳定 过程中, 在某一数值, 在某一数值,而是一直 在变化中, 在变化中,因此称为能 耗制动过程。
U N − Ea Ia = Ra
反接后: 反接后: 所以: 所以: I
'
U = −U N
a
= −
U
N
+ Ea Ra
因此反接后电流的数值将非常大,为了限 因此反接后电流的数值将非常大, 制电枢电流, 制电枢电流,所以反接时必须在电枢回路 串入一个足够大的限流电阻。 串入一个足够大的限流电阻。
Rmin
bldc无刷电机刹车原理
bldc无刷电机刹车原理摘要:1.BLDC 无刷电机简介2.BLDC 无刷电机刹车的原理3.BLDC 无刷电机刹车的实现方式4.BLDC 无刷电机刹车的优点与应用正文:【1.BLDC 无刷电机简介】BLDC(Brushless Direct Current)无刷直流电机,又称为无刷电机,是一种采用直流电源驱动的电机。
与传统的有刷电机相比,BLDC 无刷电机具有更高的效率、更低的噪音、更长的寿命以及更小的体积等优点。
因此,BLDC 无刷电机在众多领域得到了广泛应用,如电动汽车、工业自动化、家用电器等。
【2.BLDC 无刷电机刹车的原理】BLDC 无刷电机刹车,也称为BLDC 无刷电机制动,主要是通过改变电机的电源频率或电压,从而改变电机的转速,实现刹车的目的。
其原理可以分为以下两种:(1)变频刹车:通过改变电机供电频率,使电机转速下降,从而实现刹车。
当电机转速降至一定程度时,电机将停止转动。
(2)直流刹车:通过改变电机供电电压,使电机转速下降,从而实现刹车。
当电机转速降至零时,电机将停止转动。
【3.BLDC 无刷电机刹车的实现方式】BLDC 无刷电机刹车的实现方式主要有以下两种:(1)采用变频器:变频器是一种用于调整交流电机转速的设备,通过改变输出电压和频率,实现对电机转速的控制。
因此,可以通过变频器实现对BLDC 无刷电机的刹车。
(2)采用直流电源:通过改变直流电源的电压,可以实现对BLDC 无刷电机转速的控制。
当电源电压降至一定程度时,电机将停止转动。
【4.BLDC 无刷电机刹车的优点与应用】BLDC 无刷电机刹车具有以下优点:(1)刹车响应速度快:与传统的有刷电机相比,BLDC 无刷电机刹车响应速度更快,可以实现更精确的控制。
(2)刹车性能稳定:BLDC 无刷电机刹车性能稳定,可以实现可靠的制动。
(3)能耗低:BLDC 无刷电机刹车的能耗相对较低,可以降低系统的能耗。
直流电机的制动方法
直流电机的制动方法一、直流电机制动的重要性。
1.1 就像汽车需要刹车一样,直流电机也需要制动。
直流电机在很多设备里就像一颗跳动的心脏,不停地转动来带动其他部件工作。
可是呢,当不需要它转的时候,或者要让它快速停下来的时候,制动就非常关键了。
要是没有有效的制动,就好比一辆车停不下来,那可就乱套了。
1.2 从安全的角度来说,在一些设备里,如果直流电机不能及时制动,可能会引发危险。
比如说在一些起重设备中,电机要是突然失控,那吊起来的重物可就像脱缰的野马,后果不堪设想。
所以制动方法的研究和应用是直流电机使用中不可或缺的部分。
2.1 能耗制动。
这就好比是让电机自己把自己的能量消耗掉从而停下来。
当电机要停止转动的时候,把它的电枢从电源断开,然后接到一个电阻上。
这时候电机就像一个泄了气的皮球,它原本储存的能量就通过这个电阻以热能的形式散发出去。
就像一个人在跑步的时候突然被拉住,他还会往前冲一段,但是因为有阻力(这里就是电阻),慢慢地就停下来了。
这种方法简单易行,在很多小型直流电机设备中经常使用,就像那些小型的电动玩具车之类的。
2.2 反接制动。
这个方法有点像“背道而驰”。
就是把电机的电枢电压突然反接,这样电机就会受到一个和原来转动方向相反的转矩。
这就好像你本来向前走,突然有一股很大的力量把你往后拉。
不过这种方法有个缺点,就是在制动的时候电流会很大,就像洪水猛兽一样,很容易对电机和电路造成损害。
所以在使用的时候往往要在电路里加上限流电阻,就像给洪水加上堤坝一样,来限制这个过大的电流。
这种制动方法制动效果很明显,能让电机快速停下来,在一些对制动速度要求比较高的设备中会用到,像一些机床设备。
2.3 回馈制动。
这可是一种比较“聪明”的制动方法。
当电机的转速高于理想空载转速的时候,电机就会像一个小发电机一样,把电能回馈到电源端。
这就像一个懂得节约的人,把多余的东西回收利用起来。
这种方法既能够实现制动,又能把能量回收,一举两得。
直流无刷电机工作原理详解无刷电机中的专业知识点

直流⽆刷电机⼯作原理详解⽆刷电机中的专业知识点⽆刷电机⼯作原理电磁学基本知识⾸先给⼤家复习⼏个基础定则:左⼿定则、右⼿定则、右⼿螺旋定则。
左⼿定则这个是电机转动受⼒分析的基础,简单说就是磁场中的载流导体,会受到⼒的作⽤。
⽤于判断导线在磁场中受⼒的⽅向:伸开左⼿,使拇指与其他四指垂直且在⼀个平⾯内,让磁感线从⼿⼼流⼊,四指指向电流⽅向,⼤拇指指向的就是安培⼒⽅向(即导体受⼒⽅向)。
右⼿定则这是产⽣感⽣电动势的基础,跟左⼿定则的相反,磁场中的导体因受到⼒的牵引切割磁感线产⽣电动势。
⽤于判断在磁场中运动的导体产⽣的电流⽅向:伸开右⼿,使⼤拇指跟其余四个⼿指垂直并且都跟⼿掌在⼀个平⾯内,把右⼿放⼊磁场中,让磁感线垂直穿⼊⼿⼼,⼤拇指指向导体运动⽅向,则其余四指指向感⽣电动势的⽅向。
也就是切割磁感线的导体会产⽣反电动势,实际上通过反电动势定位转⼦位置也是普通⽆感电调⼯作的基础原理之⼀。
右⼿螺旋定则(安培定则)⽤于判断通电线圈的磁场极性:⽤右⼿握螺线管,让四指弯向螺线管中电流⽅向,⼤拇指所指的那端就是螺线管的N极。
直线电流的磁场的话,⼤拇指指向电流⽅向,另外四指弯曲指的⽅向为磁感线的⽅向。
为什么要讲感⽣电动势呢?不知道⼤家有没有类似的经历,把电机的三相线合在⼀起,⽤⼿去转动电机会发现阻⼒⾮常⼤,这就是因为在转动电机过程中产⽣了感⽣电动势,从⽽产⽣电流,磁场中电流流过导体⼜会产⽣和转动⽅向相反的⼒,⼤家就会感觉转动有很⼤的阻⼒。
不信可以试试。
三相线分开,电机可以轻松转动三相线合并,电机转动阻⼒⾮常⼤看完了三⼤定则,我们接下来先看看电机转动的基本原理。
第⼀部分:直流电机模型我们找到⼀个中学物理学过的直流电机的模型,通过磁回路分析法来进⾏⼀个简单的分析。
状态1当两头的线圈通上电流时,根据右⼿螺旋定则,会产⽣⽅向指向右的外加磁感应强度B(如粗箭头⽅向所⽰),⽽中间的转⼦会尽量使⾃⼰内部的磁感线⽅向与外磁感线⽅向保持⼀致,以形成⼀个最短闭合磁⼒线回路,这样内转⼦就会按顺时针⽅向旋转了。
直流电动机的制动
直流电动机的制动一台生产机械工作完毕就需要停车,因此需要对电机进行制动。
最简洁的停车方法是断开电源,靠摩擦损耗转矩消耗掉电能,使之渐渐停下来,这叫做自由停车法。
自由停车一般较慢,特殊是空载自由停车,更需较长的时间,如盼望快速停车,可使用电磁制动器,俗称“抱闸”。
也可使用电气制动方法,分三种,能耗制动、反接制动和回馈制动1.能耗制动停车时,不只是断电,而且将电枢马上接到上(为限制电流过大)由于磁场保持不变(书中为并励)由于惯性,n存在且与电动时相同,所以与电动时方向相同。
电流方向相反。
所以反向。
由于转矩与电动状态相反,产生一制动性质的转矩,使其快速停车。
制动过程是电机靠惯性发电,将动能变成电能,消耗在电枢总电阻上,因此称之为能耗制动。
能耗制动操作简洁,但低速时制动转矩很小。
图1 并励电动机能耗制动接线图图2 并励电动机反接制动接线图2.反接法采纳以上能耗制动方法,在低速时效果差,如采纳反接制动,可得到更剧烈的制动效果。
利用反向开关将电枢反接,反接同时串入电阻(为限制电流过大)为负,所以为负反接制动时最大电流不得超过2,则应使对于能耗制动缺点:能量损耗大,转速下降到零时,必需准时断开电源,否则将有可能反转。
3.回馈制动当为负,为负。
例如电车下坡时的运行状态电车在平路上行驶时,摩擦转矩是制动性质的系统运行于a点。
这时。
当电车下坡时,仍存在(暂不考虑数值变化),车重产生的转矩是关心运动的,如,合成转矩与n方向相同,因而n上升,当,使变负,使变负,为负此时电机进入发电状态,发出电能,回馈到电网,称为回馈制动,稳定运行在b点。
总之,电气制动是电机本身产生一制动性质的转矩,使电机快速停转。
直流电机的制动与控制
一、引言从广义上讲,电机是电能的变换装置,包括旋转电机和静止电机。
旋转电机是根据电磁感应原理实现电能与机械能之间相互转换的一种能量转换装置;静止电机是根据电磁感应定律和磁势平衡原理实现电压变化的一种电磁装置,也称其为变压器。
这里我们主要讨论旋转电机,旋转电机的种类很多,在现代工业领域中应用极其广泛,可以说,有电能应用的场合都会有旋转电机的身影。
与内燃机和蒸汽机相比,旋转电机的运行效率要高的多;并且电能比其它能源传输更方便、费用更廉价,此外电能还具有清洁无污、容易控制等特点,所以在实际生活中和工程实践中,旋转电机的应用日益广泛。
不同的电机有不同的应用场合,随着电机制造技术的不断发展和对电机工作原理研究的不断深入,目前还出现了许多新型的电机,例如,美国EAD公司研制的无槽无刷直流电动机,日本SERVO公司研制的小功率混合式步进电机,我国自行研制适用于工业机床和电动自行车上的大力矩低转速电机等。
1 旋转电机分类在旋转电机中,由于发电机是电能的生产机器,所以和电动机相比,它的种类要少的多;而电动机是工业中的应用机器,所以和发电机相比,人们对电动机的研究要多的多,对其分类也要详细的多。
实际上,我们通常所说的旋转电机都是狭义的,也就是电动机——俗称“马达”。
众所周知,电动机是传动以及控制系统中的重要组成部分,随着现代科学技术的发展,电动机在实际应用中的重点已经开始从过去简单的传动向复杂的控制转移;尤其是对电动机的速度、位置、转矩的精确控制。
由此可见,对于一个电气工程技术人员来说,熟悉各种电机的类型及其性能是很重要的一件事情。
通常人们根据旋转电机的用途进行基本分类。
下面我们就从控制电动机开始,逐步介绍电机中最有代表性、最常用、最基本的电动机——控制电动机和功率电动机以及信号电机。
2 控制电动机2.1 伺服电动机伺服电动机广泛应用于各种控制系统中,能将输入的电压信号转换为电机轴上的机械输出量,拖动被控制元件,从而达到控制目的。
无刷直流电机的原理和控制介绍

无刷直流电机的原理和控制介绍contents •无刷直流电机概述•无刷直流电机的工作原理•无刷直流电机的驱动与控制•无刷直流电机的性能与优化•无刷直流电机的应用案例与发展趋势•总结与展望目录CHAPTER无刷直流电机概述01020304高效率长寿命低噪音高性能电动汽车航空航天家用电器工业机器人无刷直流电机的应用领域CHAPTER无刷直流电机的工作原理转子霍尔传感器或编码器定子电机的基本构造电机的工作原理详解电机以恒定转速运行,通过闭环控制系统保持转速稳定。
恒速模式调速模式正反转控制制动状态根据负载变化或其他控制需求,通过改变定子绕组电流的频率和幅值,实现电机转速的调节。
通过改变定子绕组电流的相序,实现电机的正转和反转。
当电机需要停止时,可以通过短路定子绕组或反向通电等方式实现快速制动。
电机的工作模式与运行状态CHAPTER无刷直流电机的驱动与控制电机驱动电路的基本构成功率电子器件01控制芯片02电源和保护电路03六步换相法通过脉宽调制(PWM)技术,可以调整绕组的通电时间,从而实现电机转速的连续调节。
PWM控制传感器反馈控制电机控制策略与算法先进的电机控制技术场向量控制(FOC)直接转矩控制(DTC)智能控制技术CHAPTER无刷直流电机的性能与优化电机性能参数介绍转矩转速效率功率密度电机的性能优化方法磁场设计优化散热设计优化智能控制算法利用智能控制算法,如神经网络、遗传算法等,可以学习和优化控制规则,实现更加智能化的电机控制,提升性能和适应性。
现代控制理论应用应用现代控制理论,如自适应控制、鲁棒控制等,可以实时调整控制参数,提高电机的抗干扰能力和适应性。
预测控制技术通过引入预测控制技术,如模型预测控制(MPC),可以实时预测电机的未来行为,并优化控制决策,提高电机的动态响应和稳定性。
电机控制算法的优化与改进CHAPTER无刷直流电机的应用案例与发展趋势典型应用案例分析电动汽车航空航天工业自动化1 2 3高性能化智能化绿色化无刷直流电机的发展趋势技术挑战无刷直流电机的技术门槛较高,如何降低成本、提高生产效率,同时保持高性能是未来的技术挑战。
bldc无刷电机刹车原理

bldc无刷电机刹车原理摘要:一、无刷电机刹车原理简介1.无刷电机的概念2.刹车原理的重要性3.常见刹车方式简介二、BLDC无刷电机刹车原理详解1.BLDC无刷电机的结构和工作原理2.刹车原理的实现3.刹车方式的比较和选择三、BLDC无刷电机刹车技术的应用1.工业领域应用2.交通运输领域应用3.日常生活领域应用四、BLDC无刷电机刹车技术的发展趋势1.技术发展方向2.国内外政策推动3.对未来产业的影响正文:BLDC无刷电机刹车原理详解与应用发展一、无刷电机刹车原理简介无刷电机,即brushless direct current motor,是一种采用电子换向技术替代传统刷式换向器的电机。
相较于传统电机,无刷电机具有更高的效率、更长的寿命和更低的噪音。
在许多应用场景中,无刷电机的刹车功能尤为重要。
本文将详细介绍BLDC无刷电机的刹车原理。
二、BLDC无刷电机刹车原理详解1.BLDC无刷电机的结构和工作原理BLDC无刷电机主要由转子、定子和电子换向器组成。
通过电子换向器,电机可以实现正反转和调速。
当需要刹车时,电子换向器会改变输出信号,使电机运行在发电状态,将转矩能量转化为电能消耗。
2.刹车原理的实现BLDC无刷电机刹车原理主要通过两种方式实现:能耗制动和回馈制动。
能耗制动是通过改变电机输入电压或电流,使电机在发电状态下运行,将转矩能量消耗在制动电阻上。
回馈制动则是通过电机逆变器将电机转矩能量回馈到电网,实现制动。
3.刹车方式的比较和选择能耗制动和回馈制动各有优缺点。
能耗制动制动效果明显,但能量损耗较大;回馈制动能量损耗较小,但需要更复杂的控制系统。
在实际应用中,需要根据具体需求选择合适的刹车方式。
三、BLDC无刷电机刹车技术的应用1.工业领域应用BLDC无刷电机刹车技术广泛应用于各类工业设备,如自动化生产线、起重设备等。
在这些场景中,刹车功能可以保障设备安全、提高生产效率。
2.交通运输领域应用BLDC无刷电机刹车技术在交通运输领域也有广泛应用,如电动汽车、电动自行车等。
直流无刷电机刹车原理

直流无刷电机刹车原理直流无刷电机是一种常见的电机类型,它采用电子换相技术来实现转子的转动。
而在一些场景中,我们需要对电机进行刹车,以便快速停止转子的运动。
那么,直流无刷电机的刹车原理是什么呢?刹车是指通过施加一定的力或阻力来减慢或停止物体的运动。
在直流无刷电机中,刹车是通过改变电机的工作模式来实现的。
具体来说,刹车主要通过两种方式来实现:电流刹车和反电动势刹车。
我们来了解一下电流刹车的原理。
电流刹车是通过改变电机输入的电流来实现的。
在正常工作状态下,电机通过电子换相技术不断改变相位来驱动转子转动。
而在刹车状态下,电机会停止换相,也就是不再给电机提供正常的电流输入。
这样一来,电机的转子就会因为没有驱动力而逐渐减速,最终停止转动。
我们来了解一下反电动势刹车的原理。
反电动势是指当电机转子在磁场中旋转时,由于感应效应产生的电动势。
在正常工作状态下,电机的电流会通过电子换相技术控制,以保持电机的稳定运行。
而在刹车状态下,电机的电流会被切断,但是转子仍然会在磁场中旋转。
由于转子的旋转会产生反电动势,这个反电动势会产生一个逆向的电流,从而形成一个阻力,减慢转子的转动速度。
最终,转子会因为受到的阻力而停止转动。
需要注意的是,直流无刷电机的刹车原理是通过改变电机的工作模式来实现的,而不是通过外部施加力或阻力来实现的。
这是因为直流无刷电机是由电子换相技术控制的,通过改变相位来改变电流的方向和大小,从而实现电机的转动。
因此,在刹车状态下,只需要切断或改变电流的输入,就可以实现电机的刹车。
总结起来,直流无刷电机的刹车原理主要包括电流刹车和反电动势刹车。
电流刹车是通过切断电流的输入来实现的,而反电动势刹车是利用转子在磁场中旋转产生的反电动势来减慢转子的转动速度。
这两种刹车方式都是通过改变电机的工作模式来实现的,而不是通过外部施加力或阻力来实现的。
这些刹车原理的应用可以使直流无刷电机在需要快速停止或减速的场景中发挥重要作用。
直流无刷培训资料
直流无刷培训资料在现代电气技术的领域中,直流无刷电机以其高效、可靠、调速性能好等诸多优点,成为了众多应用场景中的热门选择。
从工业自动化到家用电器,从电动汽车到航空航天,直流无刷电机的身影无处不在。
为了让大家更好地理解和掌握直流无刷电机的相关知识,本文将为您提供一份全面的直流无刷培训资料。
一、直流无刷电机的基本原理直流无刷电机的工作原理与传统的有刷直流电机有一定的相似性,但又有着显著的区别。
传统的有刷直流电机通过电刷和换向器来实现电枢绕组中电流的换向,从而使电机持续旋转。
然而,电刷和换向器的存在不仅会产生摩擦和磨损,降低电机的效率和可靠性,还会限制电机的转速和使用寿命。
直流无刷电机则采用电子换向装置来代替电刷和换向器。
它通常由定子、转子和位置传感器组成。
定子上布置有绕组,而转子则由永磁体构成。
位置传感器用于检测转子的位置,并将信号反馈给电子换向装置,从而控制定子绕组中电流的通断和方向,实现电机的持续旋转。
二、直流无刷电机的结构特点1、定子定子铁芯:一般由硅钢片叠压而成,以减少涡流损耗。
定子绕组:常见的有集中绕组和分布绕组两种形式。
2、转子永磁体:提供磁场,常见的有钕铁硼、钐钴等高性能永磁材料。
磁钢安装方式:可以分为表贴式和内嵌式。
3、位置传感器霍尔传感器:是一种常见的位置传感器,具有成本低、响应速度快等优点。
光电编码器:精度较高,但成本也相对较高。
三、直流无刷电机的优点1、高效节能由于没有电刷和换向器的摩擦损耗,直流无刷电机的效率通常比有刷直流电机高。
2、调速性能好通过改变输入电压或控制信号的频率,可以实现电机转速的平滑调节。
3、可靠性高没有电刷和换向器的磨损,减少了故障点,提高了电机的可靠性和使用寿命。
4、低噪音、低振动运行平稳,产生的噪音和振动较小,适用于对环境要求较高的场合。
四、直流无刷电机的控制方式1、方波控制也称为六步换向控制,控制方式简单,但电机运行时转矩脉动较大。
2、正弦波控制能够实现更加平滑的转矩输出,减小转矩脉动,但控制算法相对复杂。
直流无刷电机刹车原理

直流无刷电机刹车原理直流无刷电机是一种将电能转化为机械能的装置,广泛应用于电动车、无人机、机床等领域。
在实际应用中,为了确保安全和精确控制,对电机的刹车功能提出了要求。
本文将从直流无刷电机刹车的原理、应用以及未来发展趋势三个方面进行阐述。
一、直流无刷电机刹车原理直流无刷电机的刹车是通过改变电机的工作状态来实现的。
一般来说,直流无刷电机的刹车方式主要有短接刹车、反电动势刹车和电流刹车三种。
1. 短接刹车短接刹车是通过将电机的A、B两个绕组直接短接,使电机的转子产生阻尼转动,从而实现刹车的效果。
在短接刹车的过程中,电机的电流会迅速增大,反应出较强的刹车力矩。
但由于短接刹车时电流急剧增大,可能会对电机和电源产生较大的冲击,因此在实际应用中需要注意保护措施。
2. 反电动势刹车反电动势刹车是通过改变电机的工作方式,使电机在刹车时产生反电动势,从而实现刹车的效果。
具体的方法是将电机的两个绕组连接成一个回路,使电机的反电动势电流形成一个封闭回路。
通过这种方式,电机的转子会受到反电动势的作用,从而产生阻尼转动,实现刹车效果。
3. 电流刹车电流刹车是通过改变电机的供电方式,实现刹车的效果。
具体的方法是将电机的供电电源短接,并加上一个电阻负载。
这样在刹车过程中,电机的电流会通过电阻负载流动,产生刹车力矩。
电流刹车在刹车力矩的控制上较为灵活,可以通过改变电阻负载的大小来调整刹车力矩的大小。
二、直流无刷电机刹车的应用直流无刷电机的刹车功能在很多领域都有广泛的应用。
以下是几个常见的应用场景:1. 电动车电动车在行驶过程中需要频繁刹车以确保安全,直流无刷电机的刹车功能能够快速响应刹车指令,并产生较大的刹车力矩,从而保证行驶的平稳和安全。
2. 无人机无人机在飞行过程中需要进行姿态控制和精确定位,直流无刷电机的刹车功能可以实现无人机的快速停止和精确悬停,提高飞行的稳定性和安全性。
3. 机床机床在进行切削加工时需要精确控制工件的位置和速度,直流无刷电机的刹车功能可以实现工件的快速停止和定位,提高加工的精度和效率。
最全无刷电机干货,一篇文章带你了解其控制原理

最全⽆刷电机⼲货,⼀篇⽂章带你了解其控制原理我们常⽤的⽆刷电机⾥⾯究竟有些什么技术、如何解释那些专业名词、以及各种参数和设备之间究竟有什么区别和联系呢?⽆刷电机的基本概念根据电机的结构和⼯作原理,我们可以将电机分为有刷电机、内转⼦⽆刷电机和外转⼦⽆刷电机。
有刷电机:我们也称为直流电机或者碳刷电机,是历史最悠久的电机类型,也是⽬前数量最多的电机类型。
电机⼯作时,线圈和换向器旋转,磁钢和碳刷不转,线圈电流⽅向的交替变化是随电机转动的换相器和电刷来完成的。
这种电机具有造价相对较低、扭⼒⾼、结构简单、易维护等优点。
不过由于结构限制,所以缺点也⽐较明显:1、机械换向产⽣的⽕花引起换向器和电刷摩擦、电磁⼲扰、噪声⼤、寿命短。
2、结构复杂、可靠性差、故障多,需要经常维护。
3、由于换向器存在,限制了转⼦惯量的进⼀步下降,影响了动态性能。
所以在模界主要应⽤于速度较慢和对震动不敏感的车模、船模上⾯,航模很少采⽤有刷电机。
⽆刷电机:这是模界中除了有刷电机以外⽤的最多的⼀种电机,⽆刷直流电机不使⽤机械的电刷装置,采⽤⽅波⾃控式永磁同步电机,以霍尔传感器取代碳刷换向器,以钕铁硼作为转⼦的永磁材料,性能上相较⼀般的传统直流电机有很⼤优势。
具有⾼效率、低能耗、低噪⾳、超长寿命、⾼可靠性、可伺服控制、⽆级变频调速等优点,⾄于缺点嘛……就是⽐有刷的贵、不好维护,⼴泛应⽤于航模、⾼速车模和船模。
不过,单个的⽆刷电机不是⼀套完整的动⼒系统,⽆刷基本必须通过⽆刷控制器也就是电调的控制才能实现连续不断的运转。
普通的碳刷电机旋转的是绕组,⽽⽆刷电机不论是外转⼦结构还是内转⼦结构旋转的都是磁铁。
所以任何⼀个电机都是由定⼦和转⼦共同构成的。
⽆刷电机的定⼦是产⽣旋转磁场的部分,能够⽀撑转⼦进⾏旋转,主要由硅钢⽚、漆包线、轴承、⽀撑件构成;⽽转⼦则是黏贴钕铁硼磁铁,在定⼦旋转磁场的作⽤进⾏旋转的部件,主要由转轴、磁铁、⽀持件构成。
除此之外,定⼦与转⼦组成的磁极对数还影响着电机的转速与扭⼒。
电机直流制动原理

电机直流制动原理
直流电机的制动原理是利用电机的间接耗散能量来实现制动。
当直流电机通电运转时,它就相当于一个发电机,当我们切断电源,电机的旋转能量就会变成电能,并通过电机的绕组产生感应电动势。
这个时候,如果我们将绕组闭合,通过加载一个电阻,就会使电能转化为热能并耗散掉,从而实现制动的效果。
具体来说,实现直流电机的制动分为电刹制动和回动电路制动两种方式。
电刹制动是利用电刹器将电源直接切断,使电机失去电源供应,从而停止旋转。
回动电路制动则是利用一个特殊的回路来使电机的旋转速度迅速降低,从而实现制动。
在电刹制动中,电刹器是一个能够将电源供应断开的开关装置。
当我们切断电源,电机的旋转能量会变成电能,并通过电机的绕组产生感应电动势。
此时,电流会通过电刹器,形成一个电路回路,使电能通过电刹器耗散,并最终耗散为热能。
这样就实现了电机的制动。
在回动电路制动中,通过调节电枢回路的参数,使得电机的旋转速度迅速降低,从而实现制动效果。
一种常见的回动电路制动方法是将负载电阻接入电枢回路,使得电枢能够通过外部电路耗散掉电能。
另一种方法是将电枢回路与外部反接,使电枢成为电源供电的一部分。
通过调节电枢回路的电阻和电源电压等参数,可以使电机的转速迅速减小,达到制动的目的。
总的来说,直流电机的制动原理是通过调节电机电源供应或电枢回路参数来实现制动,以使电机的旋转能量转化为电能并通
过外部电路耗散掉。
这样可以使电机迅速停止或减速,实现制动效果。
直流电机怎样制动
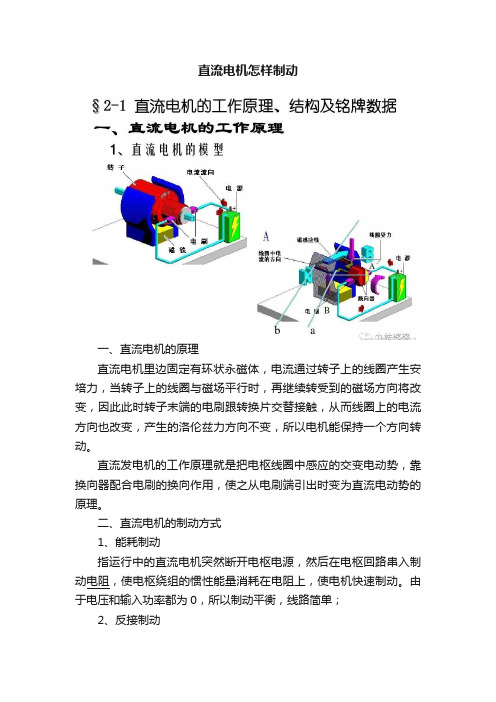
直流电机怎样制动一、直流电机的原理直流电机里边固定有环状永磁体,电流通过转子上的线圈产生安培力,当转子上的线圈与磁场平行时,再继续转受到的磁场方向将改变,因此此时转子末端的电刷跟转换片交替接触,从而线圈上的电流方向也改变,产生的洛伦兹力方向不变,所以电机能保持一个方向转动。
直流发电机的工作原理就是把电枢线圈中感应的交变电动势,靠换向器配合电刷的换向作用,使之从电刷端引出时变为直流电动势的原理。
二、直流电机的制动方式1、能耗制动指运行中的直流电机突然断开电枢电源,然后在电枢回路串入制动电阻,使电枢绕组的惯性能量消耗在电阻上,使电机快速制动。
由于电压和输入功率都为0,所以制动平衡,线路简单;2、反接制动为了实现快速停车,突然把正在运行的电动机的电枢电压反接,并在电枢回路中串入电阻,称为电源反接制动。
制动期间电源仍输入功率,负载释放的动能和电磁功率均消耗在电阻上,适用于快速停转并反转的场合,对设备冲击力大。
3、倒拉反转反接制动适用于低速下放重物制动时在电路串入一个大电阻,此时电枢电流变小,电磁转矩变小。
由于串入电阻很大,可以通过改变串入电阻值的大小来得到不同的下放速度。
反接制动时,切换极性相反的电源电压,使电枢回路内产生反向电流:反接制动时,从电源输入的电功率和从轴上输入的机械功率转变成的电功率一起消耗在电枢回路制动电阻上。
4、回馈制动(再生制动、发电制动)电动状态下运行的电动机,在某种条件下会出现由负载拖动电机运行的情况,此时出现n〉n0、Ea〉U、Ia反向,电机由驱动变为制动。
从能量方向看,电机处于发电状态——回馈制动状态。
正向回馈:当电机减速时,电机转速从高到低所释放的动能转变为电能,一部分消耗在电枢回路的电阻上,一部分返回电源;反向回馈:电机拖位能负载(如下放重物)时,可能会出现这种状态。
重物拖动电机超过给定速度运行,电机处于发电状态。
电磁功率反向,功率回馈电源。
电动状态下运行的电动机,在某种条件下(如电动机拖动的机车下坡时)会出现运行转速n高于理想空载转速n0的情况,此时Ea>U,电枢电流反向,电磁转矩的方向也随之改变:由驱动转矩变成制动转矩。
直流电机的制动

方法 课堂练习
方法 课堂练习
反接制动
❖1、优点:设备简单,成本低 制动可靠
❖2、缺点:浪费能量 制动时间较长
适用于需快速制动的小型直流电动机。
返回目录 定义
方法 课堂练习
再生制动
❖1、基本原理:转速升高(下坡车轮转速加 快),反向电动势大于电网电压,发电机 运行状态,能量反馈,限制转速继续上升 ,电动机得以稳定转速(下坡时车速得以 控制)。
答
请说出直流电动机制动方法有几种?
2 请简要表述出直流电动机制动的定义。 3 能否简要说明制动与调速、反转的区别吗?
返回目录 定义
方法 课堂练习
课堂练习
下面题目 被选前, 你可选其 中一题 作
答
1、请说出能耗制动的优缺点 。 2、请说出反接制动的优缺点。 3、请说出再生制动的优缺点 。
返回目录 定义
定义 方法 课堂练习
返回目录 定义
方法 课堂练习
制动
定义:
在生产过程中,经常需要采取一些措施使 电动机尽快停转,或者从某高速运转降到低速 运转,又或者是限制负载在某一转速下稳定运 转,这就是电动机的制动。
返回目录 定义
方法
课堂练习
制动的分类
机械制动
电气制动
能耗制动 反接制动 再生制动
返回目录 定义
方法 气 制 动 方 法
返回目录 定义
方法 课堂练习
能耗制动
❖1、切断电源,串入适当电阻。电动机由于 惯性继续旋转,产生反向电流(反向转矩 ),使得电动机得以很快停转。
❖2、电动机变换为发电机的运行状态,只不 过发出来的电能消耗在串入的电阻上。
返回目录 定义
❖2、这种从电动机状态转变为发电机状态, 把机械能转变为电能,向电源反馈送回, 称为回馈制动或再生制动或发电制动。
开拔小编呕血总结,电机知识干货大集合!

开拔小编呕血总结,电机知识干货大集合!来源:一、常用的电机控制算法1、BLDC电机控制算法无刷电机属于自换流型(自我方向转换),因此控制起来更加复杂。
BLDC电机控制要求了解电机进行整流转向的转子位置和机制。
对于闭环速度控制,有两个附加要求,即对于转子速度/或电机电流以及PWM信号进行测量,以控制电机速度功率。
BLDC电机可以根据应用要求采用边排列或中心排列PWM信号。
大多数应用仅要求速度变化操作,将采用6个独立的边排列PWM信号。
这就提供了最高的分辨率。
如果应用要求服务器定位、能耗制动或动力倒转,推荐使用补充的中心排列PWM信号。
为了感应转子位置,BLDC电机采用霍尔效应传感器来提供绝对定位感应。
这就导致了更多线的使用和更高的成本。
无传感器BLDC控制省去了对于霍尔传感器的需要,而是采用电机的反电动势(电动势)来预测转子位置。
无传感器控制对于像风扇和泵这样的低成本变速应用至关重要。
在采有BLDC电机时,冰箱和空调压缩机也需要无传感器控制。
空载时间的插入和补充大多数BLDC电机不需要互补的PWM、空载时间插入或空载时间补偿。
可能会要求这些特性的BLDC应用仅为高性能BLDC伺服电动机、正弦波激励式BLDC电机、无刷AC、或PC同步电机。
控制算法许多不同的控制算法都被用以提供对于BLDC电机的控制。
典型地,将功率晶体管用作线性稳压器来控制电机电压。
当驱动高功率电机时,这种方法并不实用。
高功率电机必须采用PWM控制,并要求一个微控制器来提供起动和控制功能。
控制算法必须提供下列三项功能:用于控制电机速度的PWM电压用于对电机进整流换向的机制利用反电动势或霍尔传感器来预测转子位置的方法脉冲宽度调制仅用于将可变电压应用到电机绕组。
有效电压与PWM占空度成正比。
当得到适当的整流换向时,BLDC的扭矩速度特性与一下直流电机相同。
可以用可变电压来控制电机的速度和可变转矩。
功率晶体管的换向实现了定子中的适当绕组,可根据转子位置生成最佳的转矩。
003-2直流电机的制动

第三章 直流电机的工作原理及特性
3.6.3 能耗制动
正转状态 正常接线 可有三种运转状态 正转
正常接线 可有三种运转状态 反转
接线方法不同 四象限对应反转状态
第三章 直流电机的工作原理及特性
小
•
重点和难点
结
– 重点 ①机械特性是分析启动、调速和制动特性的 依据,所以机械特性是电动机内容的重中之 重 ②他励直流电动机的启动特性 ③他励直流电动机的调压调速特性 – 难点 本章较难理解的内容是电流、电势的换 向过程和电动机的制动过程;电动机在各种 运转状态下电磁转矩 TM 、负载转矩TL 、转 速n、电枢电流Ia和电势E等符号的确定。
3.6.1 反馈制动 降压调速过程中的反馈制动
U1 E U2 E Ia Ib Ra Rad Ra Rad
n02 n1 TM TL U 2 E I b I b T TL n n2
第三章 直流电机的工作原理及特 性
3.6.1 反馈制动 调磁通调速过程中的反馈制动
第三章 直流电机的工作原理及特性
3.6直流他励电动机的制动 特性 制动─是从稳定转速开始减速到停止
或者限制位能负载下降速度的一种运转状态。 电动状态:电动机发出的T和n 方向相同;
制动状态:(发电状态)转矩T 与转速n方向相反。
稳定的制动状态 (n=C) 过渡的制动状态(n 是变化的)
第三章 直流电机的工作原理及特性
第三章 直流电机的工作原理及特性
3.6.3 能耗制动(U=0串接Rad)
E I a Ra Rad
3.26
n
Ra Rad K e K t
2
T
3.27
注意: Rad不能 太小
吐血整理最通俗易懂的电机控制讲解(二)

吐血整理最通俗易懂的电机控制讲解(二)对于新能源电驱系统,大家关注更多的是高压驱动电机。
实际上,除了这些“大电机”以外,还有很多“小电机”。
比如,之前谈到的驻车系统中的驻车电机-Parking Motor。
这些“小电机”越来越多的采用无刷直流电机,即BLDC电机。
与无刷直流电机相对应的是有刷直流电机。
在这里,这个“刷”通指的是碳刷。
无论是无刷直流电机还是有刷直流电机,都属于永磁同步电机:转子磁场由永磁体固定产生,定子磁场通过电流励磁产生。
温故一下永磁同步电机的工作原理,可简单由下图来描述。
此时,中间磁铁在磁场的作用下,受到来自顺时针方向的转矩。
如果中间磁铁的极性保持不变,那么最终中间磁铁会处于水平状态。
这种情况下,电机是无法实现360°旋转。
为了解决这个问题,需要对中间磁铁的极性进行切换,即所谓的换向,如下图所示。
在有刷电机中,换向是通过碳刷来实现,这也就是为什么被称为有刷电机的原因。
而无刷直流电机换向是通过控制器,同驱动大电机。
无刷直流电机和有刷直流电机两者工作原理基本相同,唯一的不同在于无刷直流电机需要一个更加复杂的控制器来实现将直流电转换为三相交流电(无碳刷实现换向),而有刷直流电机通过直流电压轻松控制(碳刷实现换向)。
看在这里,大家可能会有疑惑。
既然都属于永磁同步电机,为什么小电机被叫做“BLDC”,而驱动电机通常被叫做“PMSM”。
这样的区分对待有点怪怪的,但又不知道怪在哪。
这个问题确实对电机入学者而言,非常不友好,极易产生混淆。
从结构上来说无刷直流小电机和永磁同步大电机是一样的,都存在电机控制器、电机转子、电机定子、轴承及附件。
从能源输入来说,无刷直流小电机和永磁同步大电机是一样的,都是直流转交流。
不卖关子了,真正区分两者的参数是'反电势'。
我们常说电机反电势是电机设计中最重要的一个参数之一,是因为反电势是电机的身份证。
当电机设计冻结后,其反电势也就确定了。
直流无刷电机制动知识点吐血总结

直流无刷电机制动知识点吐血总结1. 电动车用永磁无刷直流电动机电气制动分析与仿真(1) 反接制动电流大,不回馈能量;回馈制动可以设置适当的占空比,利用电感的升压作用,向直流侧回馈能量。
(2) 反接制动过程分析:续流电动过程,向直流侧电容回馈能量,电感释放能量;反接制动过程,电感处于储能状态,电机吸收电功率,不能向直流侧回馈能量。
(3) 回馈制动过程分析:续流制动过程,电感储能;回馈制动过程,电感释放能量,给电源充电。
(4) U端电压?eA?eB?2RI2E?2RI? 此时假定I恒定;选择适当的占空比D值,就1?D1?DeA?eB2E?1?D1?D可以使开关管截止时,AB间的端电压大于电源电压,从而实现能量反馈。
如果忽略电枢电阻R,则,U端电压?(5) 结论:如果快速制动,则可以采用反接制动,但是,需要采取相应的电流限幅措施;对于频繁启动制动装置或者电动车而言,采用回馈制动,可以有效的回收能源。
2. 电动汽车制动与能量回馈技术研究(1) 当控制器接收到刹车信号时,电机从电动状态切换到制动状态。
(2)回馈制动的控制原理是升压斩波,即在一个PWM周期内,如图4所示,当t0-t1时,绕组电感积蓄磁场能量,导致回路电流上升,此时的系统状态称为续流状态;当t1-t2时,定子绕组电感放电,向蓄电池充电,导致回路电流下降,称为充电状态.(3) (4) 当控制器工作在电动状态时,转把信号有效,刹车信号无效;当控制器工作在制动状态时,转把信号无效,刹车信号有效。
(5) 提出了一种简单有效的方法来实现直流无刷电机的制动与能量回馈。
电动状态与制动状态的切换通过控制器内部控制策略完成,无需做任何硬件变动.(6)(7)3.题目:电动汽车无刷直流电动机的回馈制动控制(1)实际的回馈能量还与制动方式和回馈系统各环节的效率因子有关; 能量回馈系统各个环节的效率因子主要包括逆变器的效率、电动机的效率和蓄电池的充电效率等.(2)在实际应用中,对于PI调节器的输出(即占空比COMP)应加以滤波,防止COMP出现比较大的跳跃,这样做的目的主要是一方面防止转矩突变,另一方面可以防止电流尖峰.(3)在低于一定的车速时,由于车辆本身的动能很小,使得电动机无法输出较大的制动扭矩,回馈制动效果非常微弱,故实际系统中需要确定一个回馈制动临界转速,控制系统在车速低于此转速时不予回馈制动.(4)4. 题目:电动汽车永磁无刷直流电机驱动系统低速能量回馈制动的研究感谢您的阅读,祝您生活愉快。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.电动车用永磁无刷直流电动机电气制动分析与仿真
(1)反接制动电流大,不回馈能量;回馈制动可以设置适当的占空比,利用电感的升压
作用,向直流侧回馈能量。
(2)反接制动过程分析:续流电动过程,向直流侧电容回馈能量,电感释放能量;反接
制动过程,电感处于储能状态,电机吸收电功率,不能向直流侧回馈能量。
(3)回馈制动过程分析:续流制动过程,电感储能;回馈制动过程,电感释放能量,给
电源充电。
(4)
e222RI
11D
A B
e RI E
U
D
---
≈=
--
端电压
此时假定I恒定;选择适当的占空比D值,就可以使开关管截止时,AB间的端电压大于电源电压,从而实现能量反馈。
如果忽略电枢电阻R,则,
e2
11D
A B
e E
U
D
-
≈=
--
端电压
(5)结论:如果快速制动,则可以采用反接制动,但是,需要采取相应的电流限幅措施;
对于频繁启动制动装置或者电动车而言,采用回馈制动,可以有效的回收能源。
2.电动汽车制动与能量回馈技术研究
(1)当控制器接收到刹车信号时,电机从电动状态切换到制动状态。
(2)
回馈制动的控制原理是升压斩波,即在一个PWM周期内,如图4所示,当t0-t1时,绕组电感积蓄磁场能量,导致回路电流上升,此时的系统状态称为续流状态;当t1-t2时,定子绕组电感放电,向蓄电池充电,导致回路电流下降,称为充电状态.
(3)
(4)当控制器工作在电动状态时,转把信号有效,刹车信号无效;当控制器工作在制动
状态时,转把信号无效,刹车信号有效。
(5)提出了一种简单有效的方法来实现直流无刷电机的制动与能量回馈。
电动状态与制
动状态的切换通过控制器内部控制策略完成,无需做任何硬件变动.
(6)
(7)
3.题目:电动汽车无刷直流电动机的回馈制动控制
(1)实际的回馈能量还与制动方式和回馈系统各环节的效率因子有关; 能量回馈系统各个环节的效率因子主要包括逆变器的效率、电动机的效率和蓄电池的充电效率等.
(2)在实际应用中,对于PI调节器的输出(即占空比COMP)应加以滤波,防止COMP 出现比较大的跳跃,这样做的目的主要是一方面防止转矩突变,另一方面可以防止电流尖峰.
(3)在低于一定的车速时,由于车辆本身的动能很小,使得电动机无法输出较大的制动扭矩,回馈制动效果非常微弱,故实际系统中需要确定一个回馈制动临界转速,控制系统在车速低于此转速时不予回馈制动.
(4)
4. 题目:电动汽车永磁无刷直流电机驱动系统低速能量回馈制动的研究
(1) 在电机转速低于空载额定转速(即相感应电势最大幅值E<ud/2)时可实现电磁制动,同时向电源回馈能量.电动汽车需要电气制动的场合主要有以下两种:从高速到低速;下坡时限速。
这两种场合中,电机转速都低于其空载额定转速。
(2) 综上所述,低速回馈制动的实质,是在VT管导通时,将汽车的动能转化为磁场能量存
储在电感2(L一M)中;在VT截止时,将汽车的动能及前半周期内存储在电感中的磁场能量相加,转化为电能,通过电感的升压作用,向蓄电池回馈能量。
与此同时,由于电机电流方向在整个周期内都与电动运行时相反,故,获得制动性的电磁转矩,实现汽车的电气制动。
这种升压斩波回馈制动方式的平均制动强度与电机电流的平均值成正比,它可能达到的最大制动强度与电机的限流值及车速成正比。
当车速很低时,制动作用减弱,需辅以机械制动.
5. 混合动力中无刷直流电机反接制动PWM调制方式的研究
(1) 针对反接制动时电流无法控制的问题,该文指出反电动势短接回路的存在是造成再生电流无法控制的主要原因。
从而提出采用双管调制的方法可以对制动电流进行有效的控制. (2) 在减速或制动过程中,通过控制再生制动电流可以使系统获得平稳的制动转矩。
但当电机发生换相时,由于相电感对电流的抑制作用,使得电机在换相过程中存在转矩脉动情况。
(3)
6 题目:电动摩托车用永磁无刷电机半桥斩波式能量回馈制动实验研究
1. 由于电池电压在回馈制动时变化不大,因此回馈电流与回馈能量近似成正比.
2. 平均回馈电流与PWM占空比间关系式推导
忽略非换向区的三相导通现象,由于实际电路中电感L值不可能为无穷大路具有电机电枢电流断续和连续两种工作状态;
I为单调递增函3. 当电枢电流断续,即占空比a<1一Q时,直流母线上的平均回馈电流
ave
数;当电枢电流连续,即a ≥1一Q 时,ave I 为具有最大值的二次抛物线函数。
4.实验研究:在实验中,将永磁无刷电机与直流电机组成一个可逆拖动系统来模拟半桥斩波回馈制动工况,即令直流电机作电动运行,永磁无刷电机作发电运行。
5. 在同一占空比下,转速越高,平均回馈电流越大;随着转速的上升,使平均回馈电流达到最大值的最佳占空比逐渐减小。
6. 当PWM 占空比为(12E U
)时,平均回馈电流达到最大值为(24E UR )。
可见,随着转速的上升,最大平均回馈电流逐渐增大,对应的最佳占空比逐渐减小。
7 题目:动叉车用无刷直流电机混合制动的研究
1 确定一个回馈制动临界转速min n ,当转速高于min n 时,采用低速回馈制动;当转速低于min n 时,采用反接制动。
制动状态中,既能在高速时回馈能量.又能在低速时保持定的制动转矩,实现快速制动.
2结果采用回馈制动时.制动时间为4s :采用混合制动时,制动时间为2s ;采用自由停车制动时,制动时间为1s 。
8 题目:电动汽车电动与回馈制动下逆变电路的分析
9 题目:电动汽车用直流无刷电机能量回馈研究(addition)
1按照回馈的不同方式,将直流无刷的能量回馈分为自然回馈、全桥回馈和半桥回馈三种类型.
2。