电梯控制模型
电梯控制模型
采用步进电机作为本设 计的执行元件 ,步进电机在定位性 能方面十分优越 。步进 电机是一种感应 电机 , 它的工作原理是利 用 电子 电路 , 将直 流 电变成分 时供 电的 , 多相 时序控制 电流 , 用 这种 电流为步进 电机供 电 , 步进电机才能正常工作 , 驱动器就是 为步进电机分时供 电的 , 多相时序控制器 。 步进 电机和普通电机 的区别主要就在于其脉 冲驱动 的形式 , 正是这个特点 , 步进 电机 可 以和现代 的数字控制 技术相结合 。因为步进 电机不需要 A D / 转换 , 能够直接将数字脉冲信号转化成为角位移 。 如果给步进 电 机发一个控制脉 冲, 它就转一步 , 再发一个 脉冲 . 它会再转一步 。
一
我们所用 的是 步进 电机是二 相电机 ,所 以需要 放大两路驱 动信号 。 采 用 专 用 步 进 电 机 驱 动 器 WZ 2 0 2 . M一 H 4 M M一 H 4 M WZ 2 0 2
23 显 示 模 块 .
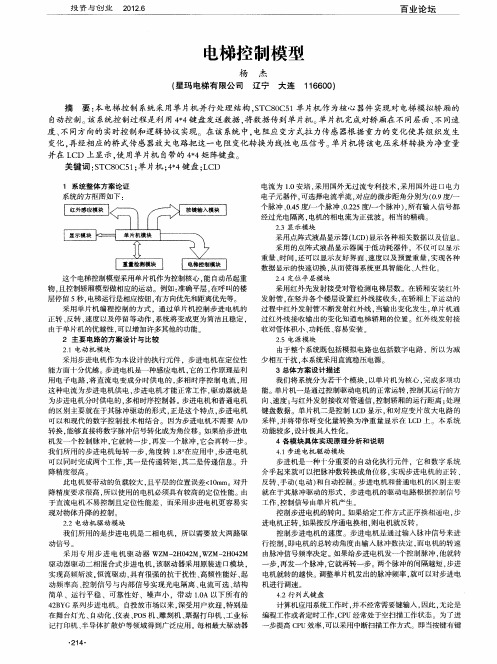
采用点阵式液晶显示器 ( c 显示各种相关数据以及 信息 。 L D) 采用 的点阵式液 晶显示器属 于低功耗器件 ,不仅 可以显示 重 量 、 间 , 可 以显 示友 好 界 面 、 度 以及 预置 重 量 , 现 各 种 时 还 速 实 数据显示 的快速切换 , 从而使得系统更 具智 能化 、 人性化 。 这个 电梯控制模型采用单 片机作为控制核心 . 自动 吊起重 能 物, 且控制轿厢模型做相应 的运动。例如 : 准确平层 , 在呼叫的楼 层停 留 5 , 秒 电梯运行是相应按钮 , 有方向优先和距离优先等 。 采用 单片机编程控制的方式 ,通过单 片机控制步进 电机 的
24定位 平 层 模 块 .
采用 红外先发射接受对管检测 电梯层数 。在轿厢 安装 红外 发射管 , 在竖井各个楼层设置 红外线接 收头 , 在轿厢上下运动的 过程 中红外发射管不断发射红外线 。 当输 出变化发 生 , 单片机通
《2024年基于PLC的八层电梯模型控制系统设计与实现》范文
《基于PLC的八层电梯模型控制系统设计与实现》篇一一、引言随着城市化进程的加快,高层建筑日益增多,电梯作为垂直交通工具,其安全、高效、稳定的运行显得尤为重要。
本文旨在设计并实现一个基于PLC(可编程逻辑控制器)的八层电梯模型控制系统,以提高电梯的运行效率及安全性。
二、系统设计1. 硬件设计本系统采用PLC作为核心控制器,配合电梯的各种传感器、执行器以及输入输出设备,实现电梯的启动、停止、定向、加速、减速、平层等功能的控制。
此外,系统还包括门禁系统、通信系统等辅助设备,以提高系统的智能化程度和安全性。
(1)PLC选择:选择一款适合电梯控制的高性能PLC,确保系统运行稳定、可靠。
(2)传感器选择:选用合适的楼层传感器、门传感器、超载传感器等,以实时监测电梯的运行状态。
(3)执行器选择:选择高性能的电机驱动器,以及门机等执行器,以实现电梯的各项动作。
2. 软件设计软件设计是本系统的关键部分,主要包括PLC程序设计、上位机监控软件设计等。
(1)PLC程序设计:采用结构化程序设计方法,将程序分为多个功能模块,如启动模块、停止模块、定向模块、平层模块等。
每个模块负责实现特定的功能,提高程序的可读性和可维护性。
(2)上位机监控软件设计:设计一款上位机监控软件,实现对电梯运行状态的实时监测、故障诊断、历史记录等功能。
同时,通过友好的人机界面,方便用户操作和管理。
三、系统实现1. PLC程序设计实现根据软件设计的要求,编写PLC程序。
程序采用梯形图和指令表相结合的方式,实现对电梯的启动、停止、定向、加速、减速、平层等功能的控制。
同时,通过程序实现对各种故障的诊断和处理。
2. 上位机监控软件实现上位机监控软件采用C/S或B/S架构,通过与PLC进行通信,实时获取电梯的运行状态和故障信息。
软件具有友好的人机界面,方便用户操作和管理。
同时,软件还具有历史记录功能,方便用户查询和分析电梯的运行情况。
四、系统测试与调试在系统实现后,进行系统测试与调试,确保系统的各项功能正常运行。
电梯控制模型
电梯控制模型
“电梯控制模型”是“电器控制与可编程序控制器”课程实验必备设备。
现有天津源峰科技公司提供的“电梯控制模型”样机一台,但功能尚不完善,可以自行研发制造。
“电梯控制模型”主体结构制作及主要技术指标:
(1)主体结构重新设计,确定为以六层结构为主(天津源峰科技公司“电梯控制模型”主体结构为四层),考虑再增加设计
并制作两台10层“电梯控制模型”主体,目的是为电梯群
控研究做准备。
(2)增加如下必备功能:
层楼数字显示功能;
层楼到站指示功能;
上下行指示功能;
开关门状态显示功能;
门电机调速功能;(*)
运行电机调速功能;(*)
每层楼呼梯信号显示功能;
(*)号部分功能为条件允许时可再增加的功能。
安放地点:信息科学与工程学院信息工程实验室。
电梯控制模型

电子设计报告摘要本电梯控制系统采用单片机并行处理结构, AT89C52单片机作为核心器件实现对电梯模拟轿厢的自动控制。
用按键代替电梯的上下指示,每一个按键旁边连接一个小灯泡。
按下电键灯泡亮,表示有呼叫。
单片机根据程序控制电机的转动方向和转动圈数来控制模拟电梯的上下和应到达的楼层。
在到达目的地后,单片机给蜂鸣器一信号使之发出声响给出提示。
单片机与各部分的联系都是通过编译器实现的。
另外本系统在箱内部分用黄灯表示向上运行,用绿灯表示向下运行。
在平层过程中没有象他人那样采用光电传感器来判断是否平层或到达那一层。
我们采取用记录电机转动的圈数来计算电梯运行的距离,来判断是否平层或到达某一层,因为每一层的距离是相等的。
但这样做的不足是使误差变大。
1.总体方案设计与论证方案一:采用可编程控制器(PLC)作为主要器件来控制电机的运动、电梯内外按键的响应、按键后的电路显示等等。
用PLC编程较简单,电路也不复杂,但此方案的各个模块的费用都比较高,考虑到我们组员对PLC的控制和编程都不太熟悉且所学知识不够全面。
故我们决定不采用本方案,而采用我们熟悉的且价格比较低的单片机实现本系统。
方案二:采用一个单片机控制所有的按键、LED、数码管显示、电动机的转动等等。
并对以上所有信号进行处理。
这样做的优点是电路比较简单,工作量小。
系统将变得更为简洁且稳定,题目所要求的所有功能都较易实现,而且片机的优越性,可以增加许多其他的功能。
综合二者,本系统采用单片机作为控制核心。
2.单元电路的设计与论证由上面的分析可知,此系统的各个模块可以简化如图1.1.2所示:图12.1) 单片机系统AT89C52单片机的系统结构框图如图2图2 图3为AT89C52单片机引脚图图3关于AT89C52单片机的最小系统的连接图和电路及AT89C52单片机芯片内部结构相关教材上已介绍的很详细,在这里我们不再赘述。
2.2)电机及驱动模块步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
模拟电梯模型(正式版)
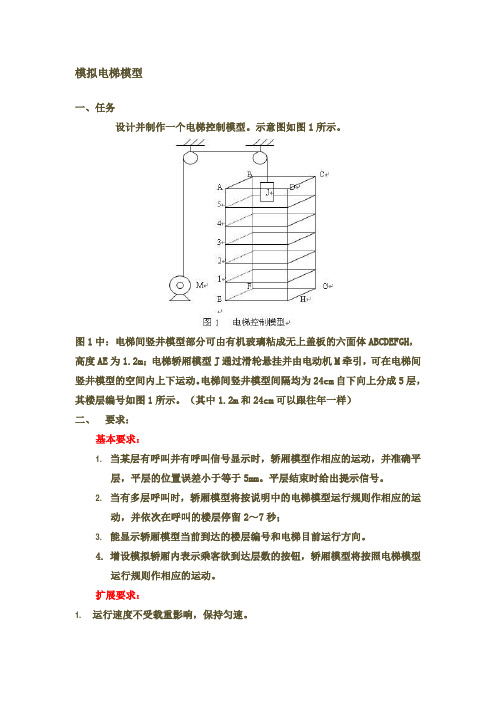
模拟电梯模型一、任务设计并制作一个电梯控制模型。
示意图如图1所示。
图1中:电梯间竖井模型部分可由有机玻璃粘成无上盖板的六面体ABCDEFGH,高度AE为1.2m;电梯轿厢模型J通过滑轮悬挂并由电动机M牵引,可在电梯间竖井模型的空间内上下运动。
电梯间竖井模型间隔均为24cm自下向上分成5层,其楼层编号如图1所示。
(其中1.2m和24cm可以跟往年一样)二、要求:基本要求:1. 当某层有呼叫并有呼叫信号显示时,轿厢模型作相应的运动,并准确平层,平层的位置误差小于等于5mm。
平层结束时给出提示信号。
2. 当有多层呼叫时,轿厢模型将按说明中的电梯模型运行规则作相应的运动,并依次在呼叫的楼层停留2~7秒;3. 能显示轿厢模型当前到达的楼层编号和电梯目前运行方向。
4.增设模拟轿厢内表示乘客欲到达层数的按钮,轿厢模型将按照电梯模型运行规则作相应的运动。
扩展要求:1. 运行速度不受载重影响,保持匀速。
2. 快、中、慢三种电梯运行速度(可用时间代替,但是都要求能明显区别开)并且不受载重影响。
3. 增设可以延长和缩短轿厢楼层停留时间的按钮(用于延长开门时间或缩短开门时间)4.停电时紧急操作。
当市电电网停电时,用备用电源将电梯运行到最近楼层待机不响应呼叫并开门。
5.高峰运行限制。
在上班高峰期上行不响应;下班高峰期下行不响应;其他时段上行下行都响应。
所有时段无响应一段时间(时间长短自己定义)后均自动返回基层。
6.采用适当的人机界面(如采用触摸屏、语音辨识等),使界面与用户的交互性良好,操作简易,运行迅速,适合各类人群。
7.提供维修人员管理操作模式,即提供管理人员的身份认定系统,并在管理人员身份认定正确后,管理人员能修改电梯运行参数,如修改轿厢运行速度、增减合法用户等等。
8.其他创新功能三、题目要求的说明1、控制电机类型不限,其安装位置及安装方式自定。
2、关键电路版(不包括最小核心板以及相关发射板)必须是自行制作的模块,功能电路板安装位置不限。
基于单片机的电梯控制模型设计
基于单片机的电梯控制模型设计
电梯是现代城市生活中不可或缺的交通工具,可以方便地将人们从一层楼移到另一层楼。
但是,如果电梯没有合适的控制系统,将会导致一系列的问题,比如电梯的过载、运行不平稳等等。
基于单片机的电梯控制模型设计可以解决这些问题。
首先,我们需要考虑电梯的控制模型。
在电梯中,需要实现的基本功能包括上行、下行、停止等等。
这些功能可以通过单片机的控制程序实现。
首先,我们需要对电梯运行的状态进行监控,包括电梯的位置和当前载重情况,将其作为输入信号传递给单片机,然后单片机进行判断,根据当前状态进行控制。
其次,我们需要考虑电梯的安全问题。
电梯运行中需要注意过载、防止急停等问题,对此,可以通过单片机的程序控制电梯的载重和速度,避免电梯的过载和急停现象。
在电梯的运行过程中,需要实现的功能还有接梯,即在每一层楼进行人员上下电梯的控制。
这需要在电梯门的开关和电梯本身的运行状态中进行判断,如果有人乘坐或者等待,就需要开启或关闭电梯门,同时根据楼层传感器的信号判断电梯的上行或下行。
在设计基于单片机的电梯控制程序时,还需要考虑一些额外的功能,比如异常处理、维修等。
在电梯故障时,需要进行异常处理,可以通过单片机程序对异常问题进行检测和处理;而维修功能可以检测各种传感器是否工作正常,确保电梯的顺畅运行。
总之,基于单片机的电梯控制模型设计可以保证电梯安全、顺畅地运行。
而且,这个模型还可以通过网络进行监控、调试和升级,方便工程师进行维护和修理。
在未来的电梯技术中,这个模型可以作为参考,提升电梯的可靠性、安全性和智能化。
我们做的是自控组的电梯控制模型
我们做的是自控组的电梯控制模型,现在由我来介绍我们的设计思路和原理。
首先是硬件部分,我们整个电路的核心是STC单片机,由它延伸出去的I/O口实现各个功能。
考虑到所使用的I/O数目已经超过32个,所以必须扩展,如何扩展???
根据题目的要求,需要两组按键,一组是1到5层的按键,还有一组是“强制向上”和“强制向下”的按键,分别用P0.0-P0.4 和P3.2、P3.3(至于为什么用这两个端口,软件部分会说明)
需要两组LED,一组是各楼层呼叫的指示灯,一共5层,还有一组是电梯运行状况的指示灯,停和行两个LED,共需要7个I/O口.这个是为了实现某层呼叫时,须有相应楼层信号灯亮的要求,以及电梯运行,绿灯亮,电梯停,红灯亮的要求。
我们用1602小液晶做显示部分,主要显示的是电梯的出发楼层和所要到达的楼层,以及电梯运行的时间和电梯某层停留的时间,单位是(秒)。
接下来讲的是语音部分:我们是打算用ISD1420这块语音芯片来实现桥厢到达每楼层有语音功能的要求。
退而求其次,我们决定用一个蜂鸣器来代替,只能提示,没有语音的功能。
最重要的不部分是电梯模型以及电机部分:我们打算用298驱动一个两相步进电机,该电机的功率大,可以实现每层运行时间不超过5秒,1到5层单程时间不超过12秒的要求。
这是方案一
还有一种方案就是用ULN2003驱动一个四相步进电机,也可以实现部分要求。
整个电梯模型由桥厢和竖井组成,桥厢用纸板做成,竖井则是由一个简易的杆子和滑轮就可以构成了,在简易的杆子上贴好标记,每层20厘米。
教学电梯模型控制系统的研究
教学电梯模型控制系统的研究近年来,随着科技的不断进步,电梯作为现代城市中不可或缺的交通工具,得到了广泛的应用和发展。
为了提高电梯的安全性和运行效率,研究人员开始关注电梯模型控制系统的研究。
本文将探讨教学电梯模型控制系统的研究现状和未来发展趋势。
教学电梯模型控制系统是指将实际电梯的运行原理和控制方法通过模型化的方式呈现给学生,以便他们更好地理解和掌握电梯控制的基本原理。
该系统通常由三部分组成:电梯模型、控制器和监控界面。
电梯模型是一个简化的物理模型,可以模拟电梯的运行过程;控制器是用来控制电梯的设备,可以根据电梯的状态和外界条件做出相应的决策;监控界面是用来显示电梯状态和控制器输出的信息。
目前,教学电梯模型控制系统的研究主要集中在以下几个方面。
首先,研究人员致力于开发更加精确和可靠的电梯模型,以提高系统的仿真效果和学习效果。
其次,他们还在探索更加高效和灵活的控制算法,以提高电梯的运行效率和响应速度。
此外,研究人员还致力于改进监控界面的设计,使其更加直观和易于操作。
未来,教学电梯模型控制系统的研究将朝着以下几个方向发展。
首先,研究人员将进一步完善电梯模型的建模方法和仿真技术,以提高模型的准确性和可靠性。
其次,他们将继续改进控制算法,使其能够更好地适应不同的电梯运行情况和外界条件。
此外,研究人员还将探索新的监控界面设计理念,以提高用户的学习体验和操作便利性。
总之,教学电梯模型控制系统的研究为电梯控制的理论和实践提供了有益的参考和借鉴。
通过该系统,学生可以更加深入地了解电梯的运行原理和控制方法,为他们今后从事相关领域的工作打下坚实的基础。
随着科技的不断进步,相信教学电梯模型控制系统在未来会有更加广阔的应用前景。
电梯控制模型
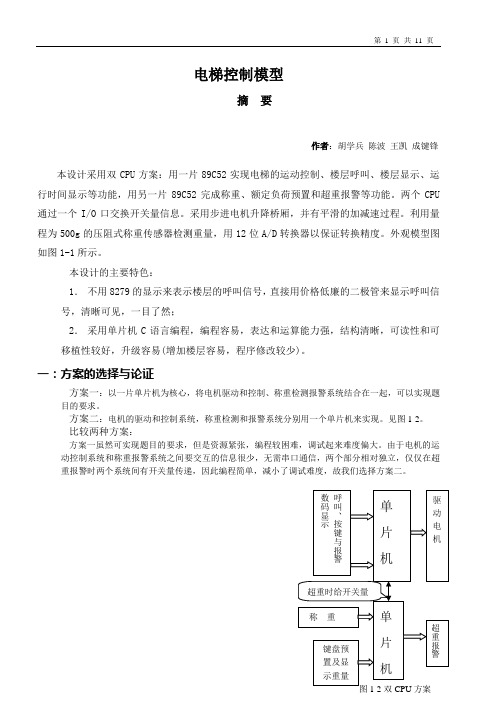
电梯控制模型摘要作者:胡学兵陈波王凯成键锋本设计采用双CPU方案:用一片89C52实现电梯的运动控制、楼层呼叫、楼层显示、运行时间显示等功能,用另一片89C52完成称重、额定负荷预置和超重报警等功能。
两个CPU 通过一个I/O口交换开关量信息。
采用步进电机升降桥厢,并有平滑的加减速过程。
利用量程为500g的压阻式称重传感器检测重量,用12位A/D转换器以保证转换精度。
外观模型图如图1-1所示。
本设计的主要特色:1.不用8279的显示来表示楼层的呼叫信号,直接用价格低廉的二极管来显示呼叫信号,清晰可见,一目了然;2.采用单片机C语言编程,编程容易,表达和运算能力强,结构清晰,可读性和可移植性较好,升级容易(增加楼层容易,程序修改较少)。
一:方案的选择与论证方案一:以一片单片机为核心,将电机驱动和控制、称重检测报警系统结合在一起,可以实现题目的要求。
方案二:电机的驱动和控制系统,称重检测和报警系统分别用一个单片机来实现。
见图1-2。
比较两种方案:方案一虽然可实现题目的要求,但是资源紧张,编程较困难,调试起来难度偏大。
由于电机的运动控制系统和称重报警系统之间要交互的信息很少,无需串口通信,两个部分相对独立,仅仅在超重报警时两个系统间有开关量传递,因此编程简单,减小了调试难度,故我们选择方案二。
图1-1 电梯模型图二:模块电路的设计与比较1.电机驱动与控制模块1.1控制电机的选择:方案一:采用步进电机:步进电机是纯粹的数字控制电动机。
它将电脉冲转化为角位移。
即给一个脉冲信号,它就转动一个角度(称为“步距角”),它的旋转是以固定的角度一步一步运行的,因此非常适合单片机控制。
步进电机的动态响应快,易于起停、正反转及变速。
而且速度可以在相当宽的范围内平滑调节,低速下仍能保证获的大转距。
可以通过控制发送脉冲数量来控制电机角位移量,从而达到准确定位的目的,由于步进电机步距角一般为0.36-1.8度,故其精度很高,而且步进电机在不走步时可将转子锁定,这样就保证了电梯可平稳而精确的停在我们需要的楼层。
三层电梯模型PLC控制系统设计与调试带程序注释
三层电梯模型PLC控制系统设计与调试(带程序注释)一、控制要求:1.系统应具备:有司机、无司机、消防三种工作模式。
2.系统应具备下列几项控制功能:1)自动响应层楼召唤信号(含上召唤和下召唤)。
2)自动响应轿厢服务指令信号。
3)自动完成轿厢层楼位置显示(二进制方式)。
4)自动显示电梯运行方向。
5)具有电梯直达功能和反向最远停站功能。
3.系统提供的输入控制信号:AYS向上行驶按钮AYX向下行驶按钮YSJ有/无司机选择开关1YC 一楼行程开关2YC二楼行程开关3YC三楼行程开关A1J 一楼指令按钮A2J二楼指令按钮A3J三楼指令按钮AJ指令专用开关(直驶)ZXF置消防开关A1S 一楼上召唤按钮A2S二楼上召唤按钮A2X二楼下召唤按钮A3S三楼上召唤按钮A3X三楼下召唤按钮4.系统需要输出的开关控制信号:KM开门显示GM关门显示MGB门关闭显示DCS上行显示DCX下行显示S上行继电器(控制电动机正转)X下行继电器(控制电动机反转)YX 运行显示A LED七段显示器a段发光二极管B LED七段显示器b段发光二极管C LED七段显示器c段发光二极管D LED七段显示器d段发光二极管E LED七段显示器e段发光二极管F LED七段显示器f段发光二极管G LED七段显示器g段发光二极管1DJA 一楼指令信号登记显示2DJA二楼指令信号登记显示3DJA三楼指令信号登记显示1DAS 一楼上召唤信号登记显示2DAS二楼上召唤信号登记显示2DAX二楼下召唤信号登记显示3DAS三楼上召唤信号登记显示3DAX三楼下召唤信号登记显示二、课题要求:1.按题意要求,画出PLC端子接线图及控制梯形图。
2.完成PLC端子接线工作,并利用编程器输入梯形图控制程序,完成调试。
3.完成课程设计说明书三、答辩问题:1.阐明程序设计思想及工作流程。
2.当层楼数增加,开关量输入和输出的点数将作如何变化?3.若需要电梯只服务于奇数楼层,梯形图将作如何变换?4.若需要电梯只服务于偶数层楼,梯形图将作如何变换?5.若正常运行方式作为方式A,上述3、4题运行方式作为方式B、方式C、方式D,如何采用两个输入开关来任选其中一个作为当前运行方式6.电梯控制中清除召唤登记的条件是什么?7.电梯控制中清除指令登记的条件是什么?下面是图纸:1、线路部分轿幅恻尧全回路打通竞全回路机房安全回陛10 12 一1KMT-2、主回路图DC1L0Y --- 0 01 3 PLC接线图Q"220 V安金回路丁1" JY!矫顶工1机房工2轿内商上平层YPs-F 平层可二L.邛YPK' ----JL娶门—L- 1 1 1 1 AGM 开门” AKM 下强减c 1KW1u上强减_______ n'1_■12KV n ______消号/L- AC n________明因_- YK_______________ Ci_---「-、 __2 ---~~7;S 2YGI (3YG■ ---L.一楼愚应器 二楼感应盟 三楼愚应器 门锁—楼指导J kTlJ — A1JC二楼指岁4^ -------------- QJ — A2J O ---------------- 三楼指旗彳 --------- O J_ A3J1二1----------------J_ A1S_ L+fe |_- rt . b ___________________________ n-ht J__tr •二楼上百0 ---------------- □ 」 A2S O ------------- -低下禹An.1— A3K三搂下召 ----------- 口 U ----------------N S4V- 24V+ RUKCOMK0 KI、也S3'K4X5X6 KT K10KllK12 K1.3K14 K16X16X17K20 X21X23’X24X25鹿6 X2-7FX2n4 PLC 接线图FX2n 5 FX2n-48MR 程序COMl! :WCOMSCOM3RBYLL JGMY12D1JD3JD2XD5HKD5——用201202 AC 22°VCOM4Y14T15TieY17i i---- 1 _F,1L--------- 1卜COMSY2QY21Y22Y23Y24Y2SY26Y2?11*1 111*---- 1|---- 1|--------- 1--------- 卜Y13sotAC 24V丁GM302DHD2DISTKM KENKOU(Y016-一褛灯,< M502 ]使用艇01』初3做楼层控制继电器,可以保德梯失电后,仍凝忆建电前楼层所在/ Y01T m二楼灯-■: M50S , ?-三楼-.;- Y020 ,?-三褛灯”FX2n-48MR 程序开X003 X004 MO M2 YOU 百B 感应下平P 感应启茹E 一曲—有总电器YonoTHT1O< Y010 1开门继电需向下按钮XOOTX010nisi H-F 锁梯<T10 KI00开门限时bTll KI00 :关门限时 "YOU : 门缝电嚣7 FX2n-48MR 程序 Y014 (M51 〕 "锁梯'门4 K100锁梯延时{SETI侬1输出禁止 (M80?4 '禁止输M52 "J输出禁止8 FX2n-48MR 程序Ml I I_Y014:I__肩幼上古由灯X005X002.9 FX2n-48MR 程序M5CI1¥021¥02£ M5O2Y023 M5O3216 xoia 二楼感应肥xaiT7…X0L5 寻U应器 M3Y0L4YD15z 1灯下,扁723-7停站建时就 电器<T12K1O停站延时时 间TIP惇站送时时司F TLIlZ民耀电器10 FX2n-48MR 程序Y002X001TR245T 口叫;爵随时i 帕快生延时: 省器快车延时建 电第< T002 ] 块车接触嘲快车硅时缝 期需<T13 K1Q一快车延时时 演MOL Y003飞由慢车为赢YOOZX002:11 FX2n-48MR 程序¥002快车接触器1T 。
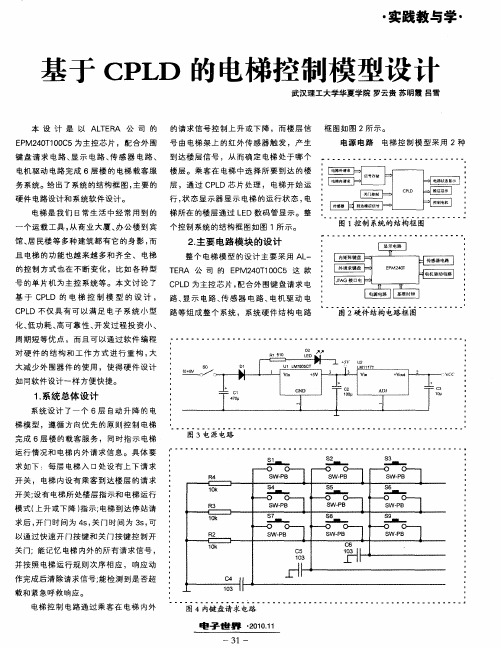
基于CPLD的电梯控制模型设计
R 4
S —B W P
S B W P
SW — B P
1 0 k
R3
_ _ S I _ 4 I ■
I ——_ ) ( O— — ——_) <
S 8
--■‘一
兰- -
O— —- o
S 9
_-■■一
O—
S ・B W P
S .B W P
SW - PB
‘
。
。
。
。
。
-
I
———— V —
、,———一
—— —— —
、 —— —
——— — — 1
一
开 关 ,电梯 内设 有乘客 到达 楼层 的请 求 开关: 设有 电梯 所处楼层指 示和 电梯运行 模式 ( 上升 或下降 ) 示: 指 电梯到达 停站请
求后 , 门时 间为 4 , 门时间 为 3 , 开 s关 s 可 以通 过 快 速 开 门按 键 和 关 门按 键 控 制 开
载和 紧急呼救响应。
_ - - - ・ ’ _ _ - _ - - ・ 0 _ I _ _ _ ・ _ - …
C 5
13 I 0 l
1 0 3
I I
上 I I
c I 4 l
上 l 一 I
-
-
-
_
・
-
_
.
-
_
-
-
・
.
_
-
-
-
-
・
-
-
_
_
.
-
-
-
-
_
_
J
电梯 控 制 电 路 通 过 乘 客 在 电梯 内 外
电梯控制模型
±3V~±18V
UA741CP
70
~
±7V~±36V
由于传感器输出信号是用于A/D采样,所以要求精度较高的放大器,而且输出信号的噪声电压在10mV以内,输出信号峰峰值在0~5V之间,通过对桥式传感电路的测试,放入500g的砝码,可以得到100mV的电压,放大400倍,即可用于A/D采样。选用OP07D组成两极反相放大器。第一级U10A,U10B,U11A组成仪用放大器。第二级U11B为反相放大器,放大倍数为20倍。C28,C31,C30是输出去耦,AN0为输出端,由于电路中积累了电荷,使得AN0电压变化缓慢,所以在AN0端接入R=10K的电阻作负载。电路中的D5、D6组成限幅器,C7,C8,C2,C1是电源去耦电路。
电压放大倍数计算如下:
即整个电路的放大倍数约为400倍。
2.4.2)机械部分:
我们在实际调试过程中发现:由于砝码与应变片的接触面积较大,导致应变片的形变不能正确反应出砝码的质量。故我们经过讨论后决定采用天平称重部分的原理,特制做一个托盘。这样砝码与应变片就可以进行“点”接触,称重的误差较小。具体示意图如图2.4.2所示:其中的竖直挡板用于防止在运动过程中砝码的掉落,水平挡板上加一个较软的皮片,防止托盘晃动。
2.2)电机及驱动调速模块:
方案一:电机选用直流电机。
驱动部分采用电阻网络或数字电位器调整电动机的分压,从而达到调速的目的。但是电阻网络只能实现有级调速,而数字电阻的元器件价格比较昂贵。再加上一般电动机的电阻很小,但电流很大,分压不仅会降低效率,而且实现很困难。更为主要的问题是一般电动机如直流电机很难使其立即停止,达不到电梯的在定点停止的效果。
此最小系统除了具有一般单片机最小系统的功能如地址锁存、输入输出控制外,另外它的主要特点是它的输出口部分接有液晶显示,可以数字显示各要输出的状态和数据,系统板的P1,P2,P3口经过三级管和发光二级管相接,可以显示各口线的实时工作状态。关于单片机最小系统的连接图和电路,由于教材上已介绍的很详细,在这里我们不再多述。
电梯模型控制实验报告
一、实验目的1. 了解电梯模型的基本结构和工作原理。
2. 掌握电梯模型控制系统的组成和功能。
3. 熟悉电梯模型控制实验的操作步骤和注意事项。
4. 通过实验,提高对电梯控制系统设计的实际操作能力。
二、实验原理电梯模型控制系统采用可编程控制器(PLC)实现逻辑智能控制,交流变频调速(VVVF)驱动,其硬件结构的组成及功能与实际电梯完全一样。
电梯模型具有自动平层、自动开门关门、顺向响应轿厢内外呼梯信号、直驶、电梯安全运行保护以及电梯急停、慢上、慢下、照明、风扇等功能。
三、实验设备1. 电梯模型一套2. PLC编程器一台3. 交流变频调速器一台4. 电源一台5. 测量工具(万用表、示波器等)四、实验步骤1. 搭建电梯模型,确保电梯模型运行平稳、可靠。
2. 连接PLC编程器和电梯模型,设置好PLC的输入输出端口。
3. 编写PLC控制程序,实现电梯模型的基本功能。
4. 将编写好的PLC程序下载到PLC编程器中。
5. 检查PLC输入输出端口,确保电梯模型运行正常。
6. 进行电梯模型控制实验,观察实验结果。
五、实验内容1. 电梯模型的基本功能实验:(1)自动平层实验:观察电梯模型在不同楼层自动停靠的情况。
(2)自动开门关门实验:观察电梯模型在到达指定楼层时自动开门和关门的情况。
(3)顺向响应轿厢内外呼梯信号实验:观察电梯模型对轿厢内外呼梯信号的响应情况。
(4)直驶实验:观察电梯模型在指定楼层之间直驶的情况。
2. 电梯模型的安全运行保护实验:(1)电梯急停实验:观察电梯模型在急停按钮按下时,是否能够立即停止运行。
(2)慢上慢下实验:观察电梯模型在慢上慢下模式下的运行情况。
(3)照明和风扇实验:观察电梯模型在照明和风扇功能下的运行情况。
六、实验结果与分析1. 自动平层实验:电梯模型在不同楼层能够自动停靠,符合预期效果。
2. 自动开门关门实验:电梯模型在到达指定楼层时自动开门和关门,符合预期效果。
3. 顺向响应轿厢内外呼梯信号实验:电梯模型对轿厢内外呼梯信号的响应迅速准确,符合预期效果。
毕业设计(论文)-电梯控制模型硬件设计

电梯控制模型硬件设计摘要:本设计是利用电梯控制模型的教学实验仪器模拟电梯,以电梯的运动作为设计重点。
本电梯控制模型是采用Cygnal MCS51单片机作为核心器件,实现对电梯模拟轿厢的自动控制。
该系统控制过程是利用红外脉冲测速的方法, 采用H型脉冲宽度调制电路对电机驱动调速,实现转速和方向的控制;轿厢测重用一片电阻应变片吊拉方式,保证承受能力; LED与LCD同时多变量显示及超重报警、语音提示。
系统能够响应楼层呼叫、准确到位、自动记录、显示楼层编号及运行时间。
轿厢模型能够显示并存储物体重量,可以预置额定负荷,可发超重报警信号,厢内能够表示乘客欲达到的层数按钮,可按电梯模型运行规则做相应的运动。
关键词:CygnalMCS51脉冲宽度调制电阻应变片Hardware Design of Elevator Control Model ABSTRACT: In this paper, the elevator control model adopts Cygnal MCS51 single chip as the chief part to realize the automatic mechanical action of the simulate elevator car. The systemic controlling process makes use of the infrared to measure the speed, and transmits the signal to a single chip. The electrical machine drives adopts the pulse width modulation electro circuit which can simply realize the controlling of turning speed and direction. The elevator car assures the bearing ability with the way of hanging a resistor. The LED and LCD can variably display and phonically report with the alarm system. The system can respond to the floor calling signal and record the number of floor and the running time accurately and automatically. The model of elevator car can show the weight of the object in it, prearrange a limit weight, and send out the signal of overweight. The floor number button inside the car can also drive the car commendably.Keywords: CygnalMCS51; Pulse width modulation; Strain resistor目录前言 (1)一电梯的发展趋势及选题背景 (2)1电梯的发展趋势 (2)2选题背景 (3)二系统设计与方案论证 (5)1系统整体设计与方案论证 (5)2单片机控制模块设计与方案论证 (6)3电机驱动调速模块设计与方案论证 (6)4轿厢称重模块设计与方案论证 (8)5液晶显示模块设计与方案论证 (8)6键盘输入模块设计与方案论证 (9)三系统的原理概述 (10)1电机转速测控部分的工作原理 (10)2轿厢称重部分工作原理 (13)四系统硬件设计 (16)1单片机核心设计 (16)2直流电机驱动电路的设计 (18)3键盘显示电路的设计 (20)4电源部分的设计 (22)5超重报警及语音提示电路的设计 (23)五系统软件设计 (25)1程序总框架流程图 (25)2轿厢称重流程图 (27)六系统调试 (28)1用户样机硬件调试 (28)2用户样机软件的设计、调试 (29)总结 (31)致谢 (32)参考文献 (33)前言随着高层建筑的兴建,电梯作为一种垂直运输载人交通工具,近几年得到迅速发展。
电梯控制模型
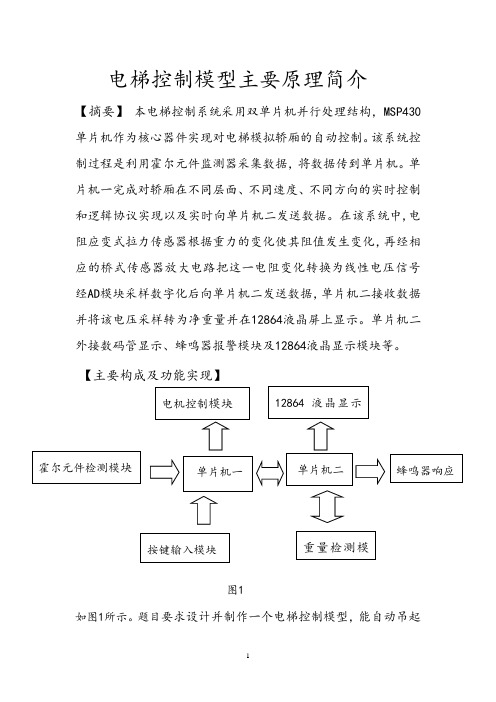
电梯控制模型主要原理简介【摘要】 本电梯控制系统采用双单片机并行处理结构,MSP430单片机作为核心器件实现对电梯模拟轿厢的自动控制。
该系统控制过程是利用霍尔元件监测器采集数据,将数据传到单片机。
单片机一完成对轿厢在不同层面、不同速度、不同方向的实时控制和逻辑协议实现以及实时向单片机二发送数据。
在该系统中,电阻应变式拉力传感器根据重力的变化使其阻值发生变化,再经相应的桥式传感器放大电路把这一电阻变化转换为线性电压信号经AD 模块采样数字化后向单片机二发送数据,单片机二接收数据并将该电压采样转为净重量并在12864液晶屏上显示。
单片机二外接数码管显示、蜂鸣器报警模块及12864液晶显示模块等。
【主要构成及功能实现】图1 如图1所示。
题目要求设计并制作一个电梯控制模型,能自动吊起12864液晶显示按键输入模块单片机一 电机控制模块 霍尔元件检测模块 重量检测模单片机二 蜂鸣器响应重物,且控制轿厢模型作相应的运动。
主要模块(1)电机控制模块电机选择采用直流减速电机作为本设计的执行元件,直流机配以不同减速比减速箱可以实现不同速度的要求,而且减速箱具有自锁功能(电机不动时锁定转子),具有扭矩大,定位准的好处。
电机驱动采用LM298电机驱动模块该芯片能放大四相0 到5 伏控制信号,控制5 到24 伏范围的电源驱动电机,实现正反转;具有适用电压范围大、控制精准等好处。
(2)定位平层模块传感器选择霍尔元件,是一种基于霍尔效应的磁传感器。
可以用它检测磁场变化。
其具有结构牢固,体积小,重量轻等好处。
我们在每一层安装霍尔元件,在电梯轿厢上附以磁铁。
当轿厢运动到特定位置,竖井上的磁铁接近霍尔元件探测磁场,其输出发生变化,单片机通过输出的变化知道电梯轿厢平层的位置。
(3)称重模块采用电阻应变式拉力传感器,将物理信号转变为电信号再经AD模块采集后转变为数字量向单片机二发送信号,单片机二获得的数据后,将其处理后在液晶显示屏上显示出当前重量。
设计5 四层电梯模型

设计5 四层电梯模型控制
一、设计目的
1.设计出PLC控制的四层四站电梯实际模型系统;
2.掌握PLC控制实际系统的程序设计与调试的方法;
3.进一步培养学生的综合设计能力、分析问题与解决问题能力。
二、系统组成
本电梯模型由“四层四站电梯对象、包括电机、正反向继电器、轿厢、内选召唤按钮、外选召唤按钮、外呼指示灯、内选指示灯、楼层显示、上下行显示、平层电磁传感器检测、接线盒”等组成,采用PLC可编程进行控制,实现对电机驱动、系统实时控制、自动平层、响应呼梯信号、保护等功能。
供给学生进行设计、实习、控制、分析问题与解决问题之用。
三、设计原则
程序总体设计时,充分考虑到乘客乘坐电梯时的随机性、突发性和不确定性;也充分考虑到乘客的思维方式与习惯动作等因素,采用智能逻辑控制策略,实现电梯的全数字化控制,其目的是使电梯的运行能反映人的智慧。
控制程序设计遵循的原则是:
1. 电梯由乘客控制执行;
2. 行车方向由内选信号和外呼梯信号决定,顺向优先执行;
3. 无论电梯运行于何种状态,只要有内选信号时,优先响应内选行车方向;
4. 停层时有自动开门信号;
5. 平层精确定位控制;
6. 楼层自动控制与显示;
7. 上、下行自动控制与显示。
四、学生自行设计
1.到实验室熟悉电梯实物模型;
2.系统实验线路图设计;
3.控制程序框图与控制程序设计;
4.系统调试与解决问题的方案。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
表1
电梯系统正常情况脚本
· 用户A在3楼按上行按钮呼叫电梯,用户A希望到7楼去
· 上行按钮示灯亮
· 一部电梯到达3楼,电梯内的用户B已按下了到9楼的按 钮 · 上行按钮指示灯熄灭 · 电梯开门
· 用户A进入电梯
· 用户A按下电梯内到7楼的按钮
· 7楼按钮指示灯亮 · 电梯关门 · 电梯到达7楼 · 7楼按钮指示灯熄灭 · 电梯开门 · 用户A走出电梯 · 电梯在等待时间到后关门 ·电梯载着用户B继续上行到达9楼
3. 把策略形式化
在以上这段描述非形式化策略的文字中,共有八 个不同的名词:按钮、电梯、楼层、运动、大厦、指 示灯、请求和门。这些名词所代表的事物可作为控制 对象的初步候选者。其中,楼层和大厦是处于问题边 界之外的,因此可以忽略;运动、指示灯、请求和门 可以作为其他类的属性,例如,指示灯(的状态)可作 为按钮类的属性,门(的状态)可作为电梯类的属性。 经过上述筛选后只剩下两个候选类,即电梯和按钮。 补充了电梯控制器类之后,得到了图1所示的对象 模型。
图1电梯系统对象模型的第一次迭代
图2 电梯系统对象模型的第二次迭代
三、
建立动态模型
1. 编写脚本 这一步的目的是,决定每一个类应该做的操作。 达到这个目的的一种有效的方法,是列出用户和系统
之间相互作用的典型情况,即写出脚本(包括正常情况
脚本和异常情况脚本)。表1和表2分别是正常情况脚本 和异常情况脚本。
图5
电梯系统对象模型的第三次迭代
楼层,当到达由按钮指定的楼层时指示灯熄灭。
C2:除了大厦的最低层和最高层之外,每层楼都有两个 按钮分别指示电梯上行和下行。当这两个按钮之一被 按下时相应的指示灯亮,当电梯到达此楼层时灯熄灭, 电梯向要求的方向移动。
C3:当电梯无升降动作时,关门并停在当前楼层。
二、 建立模型 分析的第一步是构造控制对象模型。在这个步骤 中将抽象出控制对象和它的属性,并用模型图描绘控 制对象及它们彼此之间的关系。控制对象所提供的服 务将在分析后期或设计阶段再确定下来。 为了抽象出问题域中包含的控制对象,可以用下 述三个过程产生候选对象,并对所得到的结果加以精 化。 1、精确地定义问题 应该尽可能简洁地定义所需要的产品,最好只用 一句话来描述目标系统。例如,对电梯系统可以像下 面那样描述。 在一个m层楼的大厦里,用每层楼的按钮和电梯内 的按钮来控制n部电梯的移动。
表2
电梯系统异常情况脚本
· 用户A在3楼按上行按钮呼叫电梯,但是用户A希望到1
楼
· 上行铵钮指示灯亮 · 一部电梯到达3楼,电梯内用户B已按下了到9楼的按钮 · 上行按钮指示灯熄灭 · 电梯开门 · 用户A进入电梯 · 用户A按下电梯内到1楼的按钮
· 电梯内1楼按钮指示灯亮 · 电梯在等待超时后关门
图3 电梯控制器类的动态模型
四、建立功能模型
五、
进一步完善
根据从功能模型中获得的信息,重新审查对象模型
(图2)和动态模型(图3),以便进一步完善控制对象分 析的结果。 增加了“电梯门”类和“请求”类之后,得到对象
模型的第三次求精结果,如图5所示。
修改了对象模型之后,必须重新审查动态模型和 功能模型,看看是否需要进一步求精。显然,必须修 改功能模型,把数据存储“电梯门”和“请求”标识 为可做类.
· 电梯上行到达9楼
· 电梯内9楼按钮指示灯熄灭
· 电梯开门
· 用户B走出电梯 · 电梯在等待超时后关门 · 电梯载着用户A下行驶向1楼
2. 画状态转换图 电梯控制器是在电梯系统中起核心控制作用的类, 我们将画出这个类的状态转换图。为简单起见,仅考 虑一部电梯(即n=1)的情况。电梯控制器的动态模 型如图3所示,这个状态图的画法读者可对照电梯系统 的脚本来理解它。
2. 提出非形式化策略
为了提出一种解决上述问题的非形式化策略,必 须确定问题的约束条件。在上面已经对电梯问题提出 了三种约束。最好能用一小段文字把非形式化策略清 楚地表达出来,对电梯问题来说,解决问题的非形式
化策略可表达如下。
在一幢有m层楼的大厦里,用电梯内的和每个楼 层的按钮来控制n部电梯的运动。当按下电梯按钮以请 求在某一指定楼层停下时,按钮指示灯亮;当请求获 得满足时,指示灯熄灭。当电梯无升降操作时,关门 并停在当前楼层。
电梯控制分析
一、 需求陈述 我们将要讨论的是电梯的控制问题,下面给出对 这个问题的描述。 在一幢有m层楼的大厦中需要一套控制n部电 梯的产品,要求这n部电梯根据下列约束条件在楼层间 移动。
C1:每部电梯有m个按钮,每个按钮代表一个楼层。当按 下一个按钮时该按钮指示灯亮,同时电梯驶向相应的