05、电力电子技术matlab仿真-PWM调制方法2
应用Matlab仿真单相PWM整流器的一种简单方法

1引言在高功率因数PWM 整流器的设计中,通常需要对控制策略进行仿真。
常用的电力电子仿真工具中,Pspice,Saber 仿真时间长,产生大量的中间数据,占用资源多,会引起不收敛问题,适合于电路级仿真[1]。
而Matlab 以描述功率变换的状态方程为基础,有了状态方程,电路很容易用Matlab 中的Simulink 里的函数模块来表述,而且各种控制算法容易实现,而不必应用实际的元器件模型,减小了仿真运算的难度。
由于PWM 型功率变换器是一类强非线性(电子开关器件在一个周期中既工作在饱和区又工作在截止区)或断续(即按时间分段线性,在几个时间段内电路都是线性的,但拓扑结构不同)或时变(电子开关器件导通时的电阻很小,截止时的电阻很大)的电路[3]。
因此,变换器电路动态特性的解析分析方法较复杂,阻碍了这类变换器系统的动态分析与设计的顺利进行。
而把状态空间平均法应用于功率变换器的建模,是一种简单有效的研究方法。
当变流器运行于连续导电模式,并忽略其开关过程,即认为开关动作是瞬时完成的,这样,一个工作于连续导电模式下的PWM 变流器可以用两个线性非时变电路来表示。
它们与一个周期中的两种开关状态相对应,设其状态空间方程分别为1)在时间间隔DT (0≤t ≤t 0):=A 1X2)在时间间隔(1-D )T (t 0≤t ≤T ):=A 2X式中T 为PWM 开关周期,D 是其占空比,X 为状态向量,A 1,A 2为系统矩阵,将上述两个开关模型综合为一个平均模型为=[DA 1+(1-D )A 2]X2单相PWM 整流器的数学模型单相PWM 整流器主电路如图1所示。
忽略电感中的等效电阻,在仿真中用理想开关S 来代替实际器件,并把与开关器件并联的快恢复二极管的作用融入到理想开关中,当其中之一导通时,即认为该理想开关导通。
用以下方式来定义开关函数:S m =1(S m ′=0)上桥臂理想开关导通,下桥臂理想开关关断S m =0(S m ′=1)上桥臂理想开关关断,下桥臂理想开关导通。
PWM脉宽直流调速系统设计及matlab仿真验证

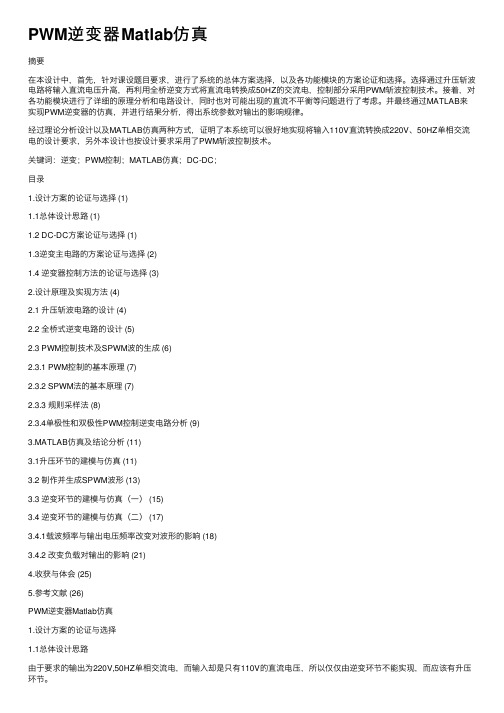
PWM脉宽直流调速系统设计及matlab仿真验证1设计任务1.1双闭环调速系统结构图图1输出功率、电流反馈控制直流变频系统原理图为了使转速和电流两种负反馈分别起作用,可在系统中设置两个调节器,分别引入转速负反馈和电流负反馈以调节转速和电流,二者之间实行嵌套链接,如图1所示。
把转速调节器的输出当做电流调节器的输入,再用电流调节器的输出去控制电力电子变换器upe。
从闭环结构上看,电流环在里面,称作内环;转速环在外边,称作外环。
这就形成了转速、电流反馈控制直流调速系统。
1.2双闭环直流变频系统的稳态结构图1图2双闭环直流变频系统的稳态结构图双闭环直流调速系统的稳态结构图如图2所示,两个调节器均采用带限幅作用的pi调节器。
转速调节器asr的输出限幅电压电流调节器acr的输出限幅电压udmucm?uim同意了电流取值的最大值,限制了电力电子变换器的最大输出电压。
当调节器饱和状态时,输入踢至限幅值,输入量的变化不再影响输入,除非存有反向的输入信号使调节器退出饱和。
当调节器不饱和时,pi调节器工作在线性调节状态,其作用是使输入偏差电压?u在稳态时为零。
为了同时实现电流的实时控制和快速追随,期望电流调节器不要步入饱和状态,因此对于静特性来说,只有输出功率调节器饱和状态与不饱和两种情况。
1.3双闭环直流调速系统的动态结构图图3双闭环直流变频系统的动态结构图双闭环直流调速系统的动态结构图如图3所示,图中表示转速调节和电流调节器的传递函数。
2wasr(s)和wacr(s)分别双闭环直流调速系统起动过程的转速和电流波形如图所示:图4双闭环直流调速系统起动过程的转速和电流波形例如图4右图,电机的再生制动过程中输出功率调节器asr经历了不饱和、饱和状态、脱饱和状态三种情况:第ⅰ阶段(0-t1)是电流上升阶段;第ⅱ阶段(t1-t2)是恒流升速阶段;第ⅲ阶段(t2以后)是转速调节阶段。
双闭环直流变频系统的再生制动过程存有以下三个特点:1)饱和状态非线性掌控2)输出功率市场汇率3)科东俄时间最优控制1.4系统参数选取1.4.1整流电路平均值失控时间常数ts设定pwm的开关频率为1khz,故h型双极式pwm整流的调制周期为:t=1/f=0.001s1.4.2电流滤波时间常数和输出功率滤波常数h桥式电路每个波头的时间为0.5ms,为了基本滤平波头,应有3(1~2)toi?0.5ms,因此取toi?0.0004s。
PWM脉宽直流调速系统设计及matlab仿真验证
PWM脉宽直流调速系统设计及matlab仿真验证————————————————————————————————作者:————————————————————————————————日期:目录1.MATLAB简介 (3)3系统设计及参数计算 (5)3.1系统总体设计 (5)3.1.1 H型双极式PWM原理 (5)3.1。
2双闭环调速系统结构图 (7)3.1。
3双闭环调速系统启动过程分析 (8)3。
2电流调节器设计及参数计算 (9)3。
3转速调节器设计及参数计算 (11)4 MATLAB仿真验证 (14)4.1稳定运行时电流环突然断线仿真分析 (14)参考文献 (19)PWM脉宽直流调速系统设计及matlab仿真验证1.MATLAB简介MATLAB是由美国mathworks公司发布的主要面对科学计算、可视化以及交互式程序设计的高科技计算环境。
它将数值分析、矩阵计算科学数据可视化以及非线性动态系统的建模和仿真等诸多强大功能集成在一个易于使用的视窗环境中,为科学研究、工程设计以及必须进行有效数值计算的众多科学提供了一种全面的解决方案,并在很大程度上摆脱了传统非交互式程序设计语言的编辑模式,代表了当今国际科学计算软件的先进水平。
[MATLAB和MATHEMATICA、MAPLE并称为三大数学软件。
它在数学类科技应用软件中在数值计算方面首屈一指。
MATLAB的基本数据单位是矩阵,它的指令表达式与数学、工程中常用的形式十分相似,故用MATLAB来解算问题要比用C,FORTRAN等语言完成相同的事情简捷得多,并且MATLAB也吸收了像MAPLE等软件的优点,使MATLAB成为一个强大的数学软件。
2 设计分析直流双闭环调速系统调节器包括转速调节器(ASR)和电流调节器(ACR),从而分别引入了转速负反馈和电流负反馈以调节转速和电流,二者之间实行串级连接.把转速调节器的输出当作电流调节器的输入,再用电流调节器的输出去控制电力电子变换器UPE。
PWM脉宽调制直流调速系统设计及MATLAB仿真验证

PWM 脉宽调制直流调速系统设计及MATLAB 仿真验证第一章 系统概述1.1 设计目的1. 掌握转速,电流双闭环控制的双极式PWM 直流调速原理。
2. 掌握并熟练运用MATLAB 对系统进行仿真。
1.2 设计题目转速,电流双闭环控制的H 型双极式PWM 直流调速系统,已知:直流电动机:48, 3.7,200/min,nom nom nom U V I A n r ===允许过载倍数λ=2;时间常数:L T =0.015s ,m T =0.2s ;PWM 环节的放大倍数:S K =4.8,;电枢回路总电阻:R=3Ω;电枢电阻Ra=2Ω。
调节器输入输出电压**nm im U U ==10V.采用MATLAB 对双闭环系统进行仿真,绘制直流调速系统(Id=const )稳定运行时转速环突然断线(1、有ACR 限幅值;2、无ACR 限幅值)仿真框图,仿真得出启动转速,起动电流,直流电压Ud ,ASR,ACR 输出电压的波形。
并对结果进行分析。
1.3 设计内容1 简述设计题目及对题目的分析;2 简述双极式PWM 直流调速系统原理;3 简述电流环,转速环的控制原理;4 对电流环、转速环的参数进行计算选取;5 根据电流环、转速换的参数进行MATLAB 仿真;第二章 转速、电流双闭环式的双极式PWM 直流调速系统2.1 双极式PWM 调速原理可逆PWM 变换器主电路有多种形式,最常用的是桥式(亦称H 形)电路,如图2-1所示,电动机M 两端电压AB U 的极性随全控型电力电子器件的开关状态而改变。
图2-1 桥式可逆PWM 变换电路双极式控制可逆PWM 变换器的四个驱动电压的关系是:1423g g g g U U U U ==-=-。
在一个开关周期内,当0≤t<on t 时 ,AB S U U =,电枢电流id 沿回路1流通;当on t ≤t<T 时,驱动电压反号,id 沿回路2经二极管续流,AB S U U =-。
直流PWM调速系统MATLAB仿真

《单片机原理及接口技术》课程设计报告课题名称直流PWM调速系统的MATLAB仿真学院自动控制与机械工程学院专业机械设计制造及自动化班级姓名(学号)时间2016-1-9摘要直流电机具有良好的启动性能和调速特性,它的特点是启动转矩大,能在宽广的范围内平滑、经济地调速,转速控制容易,调速后效率很高。
本文设计的直流电机调速系统,主要由51单片机、电源、H桥驱动电路、LED液晶显示器、霍尔测速电路以及独立按键组成的电子产品。
电源采用78系列芯片实现+5V、+15V对电机的调速采用PWM波方式,PWM是脉冲宽度调制,通过51单片机改变占空比实现。
通过独立按键实现对电机的启停、调速、转向的人工控制,LED实现对测量数据(速度)的显示。
电机转速利用霍尔传感器检测输出方波,通过51单片机对1秒内的方波脉冲个数进行计数,计算出电机的速度,实现了直流电机的反馈控制。
关键词:直流电机调速;H桥驱动电路;LED显示器;51单片机ABSTRACTDC motor has a good startup performance and speed characteristics, it is characterized by starting torque, maximum torque, in a wide range of smooth, economical speed, speed, easy control, speed control after the high efficiency. This design of DC motor speed control system, mainly by the microcontroller 51, power supply, H-bridge driver circuits, LED liquid crystal display, the Hall velocity and independent key component circuits of electronic products. Power supply with 78 series chip +5 V, +15 V for motor speed control using PWM wave mode, PWM is a pulse width modulation, duty cycle by changing the MCU 51. Achieved through independent buttons start and stop the motor, speed control, turning the manual control, LED realize the measurement data (speed) of the display. Motor speed using Hall sensor output square wave, by 51 seconds to 1 microcontroller square wave pulses are counted to calculate the speed of the motor to achieve a DC motor feedback control.Keywords: DC motor speed control;H bridge driver circuit;LED display目录第1章引言1.1 概况现代工业的电力拖动一般都要求局部或全部的自动化,因此必然要与各种控制元件组成的自动控制系统联系起来,而电力拖动则可视为自动化电力拖动系统的简称。
基于MATLAB的脉宽调制(PWM,SPWM,SVPWM)

第1章绪论1.1 脉宽调制技术的研究背景——电气传动的发展随着电力电子技术、微处理器技术的发展以及材料技术尤其是永磁材料技术的进步,电气传动系统,包括交、直流电动机调速及伺服系统,正在向系统高性能、控制数字化、一体化机电的方向发展。
直流传动系统控制简单、调速特性好,一直是调速传动领域中的重要组成部分。
现代的直流传动系统的发展方向是电动机主极永磁化及换向无刷化,而无刷直流电动机正是在这样的趋势下所发展起来的机电一体化电动机系统。
一般意义上的无刷直流电动机(Bruhless DC Motor,BLDCM)是指方波无刷直流电动机,其特征是只需简单的开关位置信号即可通过逆变桥驱动永磁电动机工作。
1975年无刷直流电动机首次出现在NASA报告中。
之后,由于高性能、低成本的第三代永磁材料的出现,以及大功率、全控型功率器件的出现,使无刷直流电动机系统获得了迅速的发展。
1977年,出现了采用钐钻永磁材料的无刷直流电动机。
之后不久,无刷直流电动机系统开始广泛采用高磁能积、高矫顽力、低成本的第三代NdFeB永磁材料,且采用霍尔元件作位置传感器,采用三相全桥驱动方式,以提高输出转矩,使其更加实用。
1986年,H.R.Bolton对方波无刷直流电动机系统进行了全面的总结,这标志着方波无刷直流电动机系统在理论上、驱动控制方法上已基本成熟。
近年来,虽然永磁直流电动机也随着永磁材料技术的发展而得到了性能的提高,依然在直流传动系统中被广泛应用,但直流传动系统已经处于无刷直流电动机大规模普及与应用的阶段。
现代交流传动系统已经由感应电动机为主发展为多机种,尤其是以永磁同步电动机的发展最为显著。
一方面,由感应电动机构成的交流调速系统性能依然不断提高,变压变频(VVVF)技术及矢量控制技术完全成熟。
通过模仿直流电动机中转矩控制的思路,采用坐标变换,把交流感应电动机的定子电流分解成励磁分量和转矩分量,并通过对磁通和转矩的独立控制、使感应电动机获得类似直流电动机的控制特性。
PWM逆变器Matlab仿真设计

PWM逆变器MATLAB仿真1设计方案的选择与论证从题目的要求可知,输入电压为110V直流电,而输出是有效值为220V的交流电,所以这里涉及到一个升压的问题,基于此有两种设计思路第一种是进行DC-DC升压变换再进行逆变,另一种是先进行逆变再进行升压。
除此之外,要得到正弦交流电压还要考虑滤波等问题,所以这两种方案的设计框图分别如下图所示:图1-1方案一:先升压再逆变图1-2方案二:先逆变,再升压方案选择:方案一:采用DC-DC升压斩波电路其可靠性高、响应速度、噪声性能好,效率高,但不适用于升压倍率较高的场合,另外升压斩波电路在初期会产生超调趋势(这一点将在后文予以讨论),在与后面的逆变电路相连时必须予以考虑,我们可以采用附加控制策略的办法来减小超调量同时达到较短的调节时间,但这将增加逆变器的复杂度和设计成本。
方案二:采用变压器对逆变电路输出的交流电进行升压,这种方法效率一般可达90%以上、可靠性较高、抗输出短路的能力较强,但响应速度较慢,体积大,波形畸变较重。
从以上的分析可以看出两种方案有各自的优缺点,但由于方案二设计较为简便,因此本论文选择方案二作为最终的设计方案,但对于方案一的相关内容也会在后文予以讨论。
2逆变主电路设计2.1逆变电路原理及相关概念逆变与整流是相对应的,把直流电变为交流电的过程称为逆变。
根据交流侧是否与交流电网相连可将逆变电路分为有源逆变和无源逆变,在不加说明时,逆变一般指无源逆变,本论文针对的就是无源逆变的情况;根据直流侧是恒流源还是恒压源又将逆变电路分为电压型逆变电路和电流型逆变电路,电压型逆变电路输出电压的波形为方波而电流型逆变电路输出电流波形为方波,由于题目要求对输出电压进行调节,所以本论文只讨论电压型逆变电路;根据输出电压电流的相数又将逆变电路分为单相逆变电路和三相逆变电路,由于题目要求输出单相交流电,所以本论文将只讨论单相逆变电路。
2.2逆变电路的方案论证及选择从上面的讨论可以看出本论文主要讨论单相电压型无源逆变电路,电压型逆变电路的特点除了前文所提及的之外,还有一个特点即开关器件普遍选择全控型器件如IGBT,电力MOSFET等,有三种方案可供选择,下面分别予以讨论:方案一:半桥逆变电路,如下图所示,其特点是有两个桥臂,每个桥臂有一个可控器件和一个反并联二极管组成。
基于MATLAB的电力电子技术虚拟实验仿真平台的设计
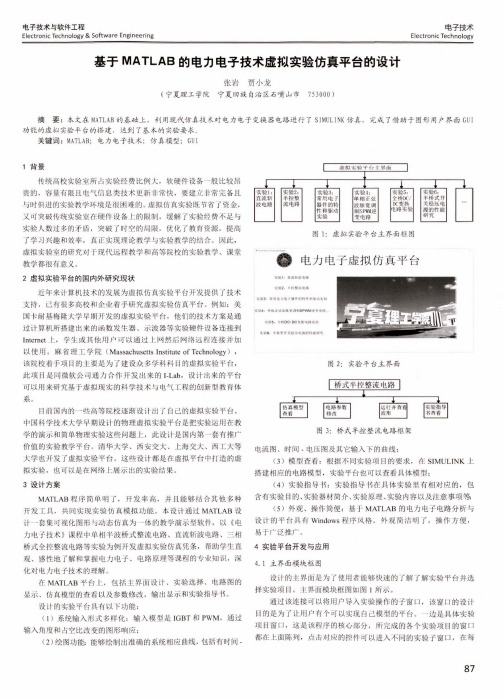
电子技术与软件工程Electronic Technology&Software Engineering电子技术Electronic Technology基于MATLAB的电力电子技术虚拟实验仿真平台的设计张岩贾小龙(宁夏理工学院宁夏回族自治区石嘴山市753000)摘要:本文在MATLAB的基础上,利用现代仿真技术对电力电子变换器电路进行了SIMULINK仿真,完成了借助于图形用户界面GUI 功能的虚拟实验平台的搭建,达到了基本的实验要求。
关键词:MATLAB;电力电子技术;仿真模型;GUI1背景传统高校实验室所占实验经费比例大,软硬件设备一般比较昂贵的,容量有限且电气信息类技术更新非常快,要建立非常完备且与时俱进的实验教学环境是很困难的。
虚拟仿真实验既节省了资金,又可突破传统实验室在硬件设备上的限制,缓解了实验经费不足与实验人数过多的矛盾,突破了时空的局限,优化了教育资源,提高了学习兴趣和效率,真正实现理论教学与实验教学的结合。
因此,虚拟实验室的研究对于现代远程教学和高等院校的实验教学、课堂教学都很有意义。
2虚拟实验平台的国内外研究现状近年来计算机技术的发展为虚拟仿真实验平台开发提供了技术支持,已有很多高校和企业着手研究虚拟实验仿真平台。
例如:美国卡耐基梅隆大学早期开发的虚拟实验平台,他们的技术方案是通过计算机所搭建出来的函数发生器、示波器等实验硬件设备连接到Internet上,学生或其他用户可以通过上网然后网络远程连接并加以使用。
麻省理工学院(Massachusetts Institute of Technology),该院校着手项目的主要是为了建设众多学科科目的虚拟实验平台,此项目是同微软公司通力合作开发出来的I-Lab,设计出来的平台可以用来研究基于虚拟现实的科学技术与电气工程的创新型教育体系。
目前国内的一些高等院校逐渐设计出了自己的虚拟实验平台。
中国科学技术大学早期设计的物理虚拟实验平台是把实验运用在教学的演示和简单物理实验这些问题上,此设计是国内第一套有推广价值的实验教学平台。
PWM逆变器Matlab仿真
PWM逆变器Matlab仿真摘要在本设计中,⾸先,针对课设题⽬要求,进⾏了系统的总体⽅案选择,以及各功能模块的⽅案论证和选择。
选择通过升压斩波电路将输⼊直流电压升⾼,再利⽤全桥逆变⽅式将直流电转换成50HZ的交流电,控制部分采⽤PWM斩波控制技术。
接着,对各功能模块进⾏了详细的原理分析和电路设计,同时也对可能出现的直流不平衡等问题进⾏了考虑。
并最终通过MATLAB来实现PWM逆变器的仿真,并进⾏结果分析,得出系统参数对输出的影响规律。
经过理论分析设计以及MATLAB仿真两种⽅式,证明了本系统可以很好地实现将输⼊110V直流转换成220V、50HZ单相交流电的设计要求,另外本设计也按设计要求采⽤了PWM斩波控制技术。
关键词:逆变;PWM控制;MATLAB仿真;DC-DC;⽬录1.设计⽅案的论证与选择 (1)1.1总体设计思路 (1)1.2 DC-DC⽅案论证与选择 (1)1.3逆变主电路的⽅案论证与选择 (2)1.4 逆变器控制⽅法的论证与选择 (3)2.设计原理及实现⽅法 (4)2.1 升压斩波电路的设计 (4)2.2 全桥式逆变电路的设计 (5)2.3 PWM控制技术及SPWM波的⽣成 (6)2.3.1 PWM控制的基本原理 (7)2.3.2 SPWM法的基本原理 (7)2.3.3 规则采样法 (8)2.3.4单极性和双极性PWM控制逆变电路分析 (9)3.MATLAB仿真及结论分析 (11)3.1升压环节的建模与仿真 (11)3.2 制作并⽣成SPWM波形 (13)3.3 逆变环节的建模与仿真(⼀) (15)3.4 逆变环节的建模与仿真(⼆) (17)3.4.1载波频率与输出电压频率改变对波形的影响 (18)3.4.2 改变负载对输出的影响 (21)4.收获与体会 (25)5.参考⽂献 (26)PWM逆变器Matlab仿真1.设计⽅案的论证与选择1.1总体设计思路由于要求的输出为220V,50HZ单相交流电,⽽输⼊却是只有110V的直流电压,所以仅仅由逆变环节不能实现,⽽应该有升压环节。
数字化PWM可逆直流调速系统MATLAB仿真
1.要求
设计一个转速、电流双闭环控制PWM可逆直流调速系统。电动机控制电源采用H型PWM功率放大器,其占空比变化为0~0.5~1时,对应输出电压为-264V~0~264V,为电机提供最大电流25A。速度检测采用光电编码器(光电脉冲信号发生器),且其输出的A、B两相脉冲经光电隔离辩相后获得每转1024个脉冲角度分辨力和方向信号。电流传感器采用霍尔电流传感器,其原副边电流比为1000:1,额定电流50A。已知:
Keywords:DCTimingSystem; PWM;Double CloseLoop; PI Adjust
六、成绩评定
指导教师评语:
指导教师签字:
2012年月日
项目
评价
项目
评价
调查论证
工作量、工作态度
实践能力
分析、解决问题能力
质量
创新
得分
七、答辩记录
答辩意见及答辩成绩:
答辩小组教师(签字):
2012年月日
5.肖阳.基于DSP的伺服电机的调速系统的控制设计[D].武汉:武汉理工大学硕士论文,2009.
6.洪乃刚.电力电子和电力拖动控制系统的MATLAB仿真.北京:机械工业出版社,2006.
四、课程设计(学年论文)摘要(中文)
本文介绍双闭环PWM直流调速系统原理基础上,根据系统的动、静态性能指标采用工程设计方法设计调节器参数。调速方案的优劣直接关系到系统调速的质量,根据电机的型号及参数选择最优方案,以确保系统能够正常,稳定地运行。并运用MATLAB的Simulink和Power System工具箱、面向系统电气原理结构图的仿真方法,实现了转速电流双闭环PWM直流调速系统的建模与仿真。文章重点介绍了调速系统的建模和PWM发生器、直流电机模块互感等参数的设置。给出了PWM直流可逆调速系统的仿真模型和仿真结果,验证了仿真模型及调节器参数设置的正确性。
用MATLAB语言对PWM调制波的计算机仿真

用MATLAB语言对PWM调制波的计算机仿真
李少军
【期刊名称】《济南大学学报:社会科学版》
【年(卷),期】1999(000)005
【摘要】阐明在MATLAB语言环境下,运用SIMULINK工具对PWM脉宽调制进行计算机仿真分析,是研究、开发PWM的最简捷、最经济的方法之一。
它在教研、高新产品的开发等方面具有重要性
【总页数】5页(P16-20)
【作者】李少军
【作者单位】济南大学机电系!山东济南250002
【正文语种】中文
【中图分类】TP391.9
【相关文献】
1.标准正弦波电源的SPWM调制方式的实现 [J], 陈燕;王岩崧;张庆祥
2.PWM调制波的多层感知神经网络音频识别 [J], 刘晓杰;章怀宇;董和磊
3.毫米波Rotman透镜天线的计算机仿真设计 [J], 刘敏;丁君;郭陈江
4.双极性SPWM调制的单相工频正弦波逆变器的设计 [J], 石新春;陈雷;张玉平
5.基于相位补偿技术SVPWM调制波构造及嵌入式实现 [J], 张恩寿;张茹;薛文娟;韩朝
因版权原因,仅展示原文概要,查看原文内容请购买。
电力电子技术中的PWM调制技术详解
电力电子技术中的PWM调制技术详解在现代工业领域中,电力电子技术扮演着至关重要的角色。
PWM (脉宽调制)技术作为电力电子技术的核心之一,已经广泛应用于各种电源和驱动系统中。
本文将深入探讨PWM调制技术的原理、应用和优势。
1. PWM调制技术的原理PWM调制技术是通过改变脉冲宽度的方式来控制电路输出的一种方法。
其基本原理是将模拟信号转换为脉冲信号,通过调整脉冲的宽度来控制输出电压或电流的大小。
PWM信号的脉冲宽度与所需输出信号的幅值成正比。
在PWM调制技术中,常用的脉冲产生方法包括比较器法、计数器法和改进型PWM等。
其中,比较器法是最常用的一种方法。
该方法通过一个比较器将输入信号与一定频率、恒定幅度的三角波进行比较,从而产生脉冲宽度调制的信号。
2. PWM调制技术的应用PWM调制技术已经广泛应用于各种电力电子设备和系统中。
以下是几个常见的应用领域:2.1 变频调速系统PWM调制技术在变频调速系统中起到了关键作用。
通过调整PWM 信号的脉冲宽度,可以实现对电机转矩和转速的精确控制。
这种技术的应用使得电机的运行更加稳定、高效,并且节省能源。
2.2 电力逆变器电力逆变器是将直流电能转换为交流电能的设备,广泛应用于太阳能发电、风能发电等领域。
PWM调制技术能够有效地控制逆变器的输出波形质量,提高逆变器的效率和稳定性。
2.3 电源管理系统在电源管理系统中,PWM调制技术能够实现电源的高效转换和稳定输出。
通过精确控制PWM信号的脉冲宽度,可以实现电源的输出电压的调节和稳定,以满足不同电器设备的需求。
3. PWM调制技术的优势PWM调制技术相比传统的模拟控制方法具有以下优势:3.1 高精度控制PWM调制技术能够精确调节输出信号的幅度,通过调整脉冲宽度来实现高精度控制。
这种精准性在很多需要精确控制的领域非常重要,比如电机调速系统和逆变器控制系统。
3.2 高效能转换由于PWM调制技术只有两种状态(高电平和低电平),因此能量损耗相对较小,能够实现高效率的能量转换。
(完整版)电力电子技术MatLab仿真.
本文前言MATLAB的简介MATLAB是一种适用于工程应用的各领域分析设计与复杂计算的科学计算软件,由美国Mathworks公司于1984年正式推出,1988年退出3.X(DOS)版本,19992年推出4.X(Windows)版本;19997年腿5.1(Windows)版本,2000年下半年,Mathworks公司推出了他们的最新产品MATLAB6.0(R12)试用版,并于2001年初推出了正式版。
随着版本的升级,内容不断扩充,功能更加强大。
近几年来,Mathworks公司将推出MATLAB语言运用于系统仿真和实时运行等方面,取得了很多成绩,更扩大了它的应用前景。
MATLAB已成为美国和其他发达国家大学教学和科学研究中最常见而且必不可少的工具。
MATLAB是“矩阵实验室”(Matrix Laboratory)的缩写,它是一种以矩阵运算为基础的交互式程序语言,着重针对科学计算、工程计算和绘图的需要。
在MATLAB中,每个变量代表一个矩阵,可以有n*m个元素,每个元素都被看做复数摸索有的运算都对矩阵和复数有效,输入算式立即可得结果,无需编译。
MATLAB强大而简易的做图功能,能根据输入数据自动确定坐标绘图,能自定义多种坐标系(极坐标系、对数坐标系等),讷讷感绘制三维坐标中的曲线和曲面,可设置不同的颜色、线形、视角等。
如果数据齐全,MATLAB通常只需要一条命令即可做图,功能丰富,可扩展性强。
MATLAB软件包括基本部分和专业扩展部分,基本部分包括矩阵的运算和各种变换、代数和超越方程的求解、数据处理和傅立叶变换及数值积分风,可以满足大学理工科学生的计算需要,扩展部分称为工具箱,它实际上使用MATLAB的基本语句编成的各种子程序集,用于解决某一方面的问题,或实现某一类的新算法。
现在已经有控制系统、信号处理、图象处理、系统辨识、模糊集合、神经元网络及小波分析等多种工具箱,并且向公式推倒、系统仿真和实时运行等领域发展。
电力电子技术matlab仿真实验报告
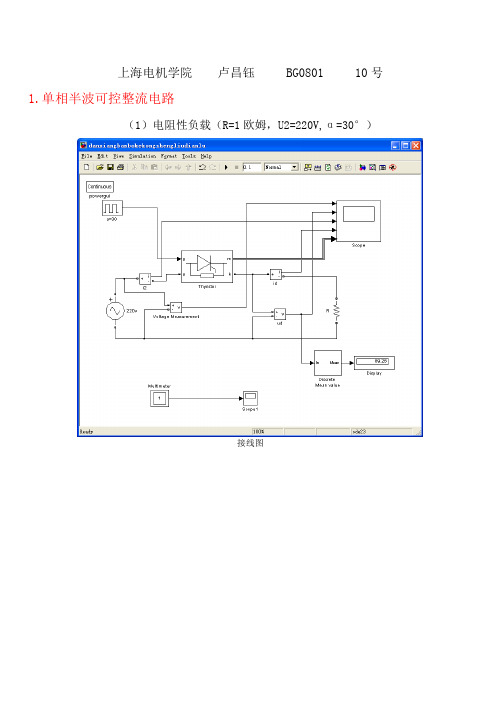
上海电机学院卢昌钰 BG0801 10号1.单相半波可控整流电路(1)电阻性负载(R=1欧姆,U2=220V,α=30°)接线图电阻性负载二次电压,输出电压,二次电流,输出电流,晶闸管电压曲线输入电压与输出电压波形(2)阻感负载(R=1欧姆,L=0.05H,U2=220V,α=30°)接线图阻感负载二次电压,输出电压,二次电流,输出电流,晶闸管电压曲线输入电压与输出电压波形(3)阻感负载+续流二极管(R=1欧姆,L=0.05H,U2=220V,α=30°)有问题接线图阻感负载二次电压,输出电压,二次电流,输出电流,晶闸管电压曲线输入与输出电压波形2.单相桥式全控整流电路(1)电阻性负载(R=1欧姆,U2=220V,α=60°)电阻性负载电路图搭建电阻负载输入电压和输出电压对比电阻负载直流电压和电流波形电阻负载时晶闸管T1的波形电流i2的曲线(2)电感性负载(R=1欧姆,L=0.05H,α=60°,U2=220V,)阻感负载电路图搭建阻感负载电压输入与输出波形阻感负载输出电流id阻感负载输出电压ud阻感负载交变时的电流i2阻感负载交变时的电压u2阻感负载VT1的电压波形(3)电感性负载+续流二极管(R=1欧姆,L=0.05H,α=60°,U2=220V,)电感性负载+续流二极管接线图输入和输出电压波形负载电流负载电压二次侧电流晶闸管两端电压3.单相桥式半空整流电路(1)电阻负载(R=1欧姆,α=60°,U2=220V,)接线图二次侧电压,负载电压,二次侧电流,负载电流,晶闸管电压,二极管电压,二极管电流波形图(2)阻感负载(R=1欧姆,L=0.05H,α=60°,U2=220V,)接线图二次侧电压,负载电压,二次侧电流,负载电流,晶闸管电压,二极管电压,二极管电流波形图(3)阻感负载+续流二极管(R=1欧姆,L=0.05H,α=60°,U2=220V,)接线图二次侧电压,负载电压,二次侧电流,负载电流,晶闸管VT1电压,二极管VD4电压,二极管VD4电流波形图4.三相半波可控整流电路电阻负载接线图(0°)三相输入电压输出电流和电压晶闸管1的电流电压输出波形(电阻0°)三相输入电压输出电流和电压晶闸管1的电流电压输出波形(电阻30°)阻感负载接线图(30°)三相输入电压输出电流和电压晶闸管1的电流电压输出波形(阻感30°)阻感负载+续流二极管接线图(30°)5.三相全控整流电路电阻负载接线图(30°导通角)三相输入输出电压对比,晶闸管1电压,输出电流电压图形(30°)阻感负载接线图(30°导通角)三相输入输出电压对比,晶闸管1电压,输出电流电压图形(30°)阻感负载+续流二极管接线图(30°导通角)6 降压BUCK电路降压斩波电路(电流连续)接线图BUCK变换器电感电流连续时仿真波形BUCK变换器电感电流断续时仿真波形7 升压Boost电路升压Boost变换器仿真接线图升压Boost变换器连续工作升压Boost变换器断续工作8 单相全桥方波逆变电路单相全桥方波电阻负载逆变电路接线图电阻负载逆变器直流侧电流,输出交流电压电流方波波形单相全桥方波阻感负载逆变电路接线图阻感负载逆变器直流侧电流,输出交流电压电流方波波形9 三相方波逆变电路三相方波逆变电路接线图三相方波逆变电路仿真波形(感性无功=100Var)10单极性的PWM方式下的单相全桥逆变电路在下:输出电压,电流和直流侧电流波形。
基于Matlab的直流电机PWM调速仿真
%限流电阻
% 电源电压
%转速状态方程 %通过PWM器件调制后的输出电压
%电流状态方程
6
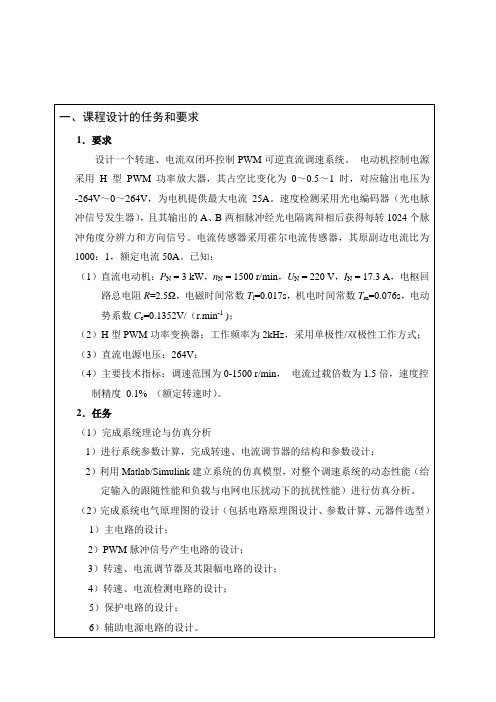
五、matlab仿真结果
分析:在以上参数选取的条件下 ①电流i=3.5A(此时电机启动尖峰电流为18A,持续时 间小于2s因此电机启动是安全的) ②转速为23.5r/s=1410r/min(转速也在额定转速内)
谢谢大家
i R
i
n
2
di =(-R ii + k Rn - u) / L (3) dt dn =(k ii - k nn2 ) / J dt (4)
图一、系统简化电路图
(3)(4)即为电路系统微分方程表达式,由于(4) 为非线性的,所以,不能写成状态方程形式。
2
二、电路系统参数设置
① ② ③ ④ ⑤ 电源电压u设为:U0=30V 额定转速n设为: Nm=1500转/分=25转/秒 回路参数设为: L=0.065H; Ri=0.72Ω; 转动惯量设为: J=0.36 PD参数设为: kr=1.0; ki=0.5;kn=0.0027; kp=0.05;kd=0.33;
图一、系统简化电路图
3
三、电路系统原理分析
仿真时PD参数的选取是难点,其对系统的影响至关 重要。在选择PD参数时应综合考虑kp、ki、kd 的 变化给系统带来的影响,具体可以按照先比例后积 分再微分的顺序反复调试参数。
电网电源 速度指令 速度 U* n 调节器 + ASR Un * Ui + Ui La 电流 Uc 调节器 ACR 电流内环 电力开关 变流装置 UPE 电流反馈 速度反馈 U d Id Ra M
5
四、matlab仿真程序
f%子函数定义 unction [dx]=F(x,Nm) L=0.065; J=0.36; R=0.72; kr=1.0; ki=0.5; kn=0.0027; U0=30; i=x(1); n=x(2); kp=0.05; kd=0.33; dn=(ki*i-kn*n^2)/J; du=kd*(kp*(Nm-n)-dn); P=du; di=(-R*i-kr*n+P)/L; dx(1)=di; dx(2)=dn; if(P>U0) P=U0; end if(P<U0) P=0;直流调速系统的一般结构
电力电子技术中的PWM调制技术是什么

电力电子技术中的PWM调制技术是什么在电力电子技术领域中,脉宽调制(PWM)技术是一种常用的调节电压或电流的方法。
PWM技术通过改变电压或电流的占空比(即高电平与总周期的比值)来实现对输出的调整。
本文将介绍PWM调制技术的基本原理及其应用。
一、PWM调制技术的基本原理PWM调制技术的基本原理是通过调节信号的脉冲宽度来控制输出电压或电流的大小。
PWM信号通常由一个固定频率的基准信号和一个可变宽度的调制信号叠加而成。
根据调制信号的宽度,可以将基准信号分为高电平和低电平两部分,从而实现对输出信号的控制。
PWM调制技术的原理可以通过以下公式来表示:V_avg = (D/T) * V_ref其中,V_avg表示输出电压(或电流)的平均值,D表示调制信号的脉冲宽度,T表示基准信号的周期,V_ref表示基准电压(或电流)。
通过调整调制信号的占空比D/T,可以实现对输出信号的精确控制。
当D/T=0时,输出信号的平均值为0;当D/T=1时,输出信号的平均值等于基准信号的幅值。
通过改变D/T的值,可以在这两个极限之间调节输出信号的大小。
二、PWM调制技术的应用1. 电力转换器在电力转换器中广泛应用PWM调制技术。
通过PWM技术,可以精确控制电力转换器的输出波形,以满足不同的需求。
例如,在直流-交流变换器(DC-AC)中,PWM技术可以用来实现对输出交流电压的频率和幅值的调节。
在交流-直流变换器(AC-DC)中,PWM技术可以用于实现对输出直流电压的稳定控制。
2. 变频驱动器PWM调制技术也被广泛应用于变频驱动器中。
变频驱动器通过调节电机的频率和电压,实现对电机转速的控制。
PWM技术可以精确地控制电机供电的电压和频率,从而实现对电机转速的调节。
这种调制方法可以提高电机的效率和响应速度。
3. LED调光在LED照明领域,PWM调制技术被用于实现LED的调光。
通过改变PWM信号的占空比,可以控制LED的亮度。
由于LED的亮度与电流的关系是非线性的,PWM调制技术可以提供更精确的亮度控制,而且可以降低功耗。
电力电子技术中的PWM调制方法及其优缺点

电力电子技术中的PWM调制方法及其优缺点电力电子技术在现代电力系统中扮演着重要的角色,PWM调制方法作为其中的重要技术手段之一,广泛应用于各类电力电子设备中。
本文将介绍PWM调制方法的基本原理,不同类型的PWM调制技术,并探讨其优缺点。
一、PWM调制方法的基本原理PWM(Pulse Width Modulation)调制方法是一种通过改变脉冲信号的宽度来控制输出电压的技术。
其基本原理是将模拟信号转换为数字信号,然后通过改变数字信号的脉冲宽度来控制输出信号的幅值。
二、常见的PWM调制技术1. 脉冲位置调制(PPM)脉冲位置调制是通过改变脉冲信号的位置来控制输出电压的技术。
它的特点是脉冲宽度不变,只改变脉冲的位置。
优点是调制电路简单,缺点是对于非线性负载的适应性较差。
2. 脉冲幅度调制(PAM)脉冲幅度调制是通过改变脉冲信号的幅度来控制输出电压的技术。
它的特点是脉冲位置固定,只改变脉冲的幅度。
优点是控制精度高,缺点是谐波较多。
3. 脉冲宽度调制(PWM)脉冲宽度调制是通过改变脉冲信号的宽度来控制输出电压的技术。
它的特点是脉冲幅度固定,只改变脉冲的宽度。
与前两种调制技术相比,PWM调制具有调制电路简单、波形失真小、谐波含量低等优点。
三、PWM调制方法的优点1. 高效性:PWM调制方法可以实现高效能的能量转换,通过控制功率开关器件的通断,可以大大提高能量转换效率。
2. 控制精度高:PWM调制方法可以精确地控制输出电压或电流的大小,使电力电子设备在工作过程中具有良好的稳定性和可靠性。
3. 可调性强:PWM调制方法可以根据需要灵活调节输出信号的幅度和频率,满足不同场合下的需求。
四、PWM调制方法的缺点1. 电磁干扰:由于PWM调制方法通过纯数字控制开关器件的通断,会产生高频的脉冲信号,可能引起电磁干扰问题。
2. 谐波问题:PWM调制方法产生的输出信号中含有较多的谐波成分,可能对其他设备产生干扰。
3. 开关损耗:当PWM调制方法需要高频切换时,开关器件的通断损耗会增加,会造成能量的浪费。
Matlab在电力电子与变频控制中的应用技巧
Matlab在电力电子与变频控制中的应用技巧在现代工业和家庭用电中,电力电子技术和变频控制技术的应用日益广泛。
而Matlab作为一款功能强大的数学建模和仿真软件,为电力电子和变频控制领域的工程师们提供了极大的便利。
本文将探讨Matlab在电力电子与变频控制中的应用技巧,并介绍一些常见的实例。
一、电力电子控制系统建模与仿真电力电子控制系统建模与仿真是电力电子领域研究的重要基础。
Matlab提供了强大的工具箱,如Simulink和Simscape Power Systems,可用于建模和仿真电力电子系统。
对于电力电子器件的建模,可以使用Simulink提供的基本电路元件进行搭建,也可以根据实际情况自定义建模组件。
例如,对于一个常见的单相桥式整流器,可以使用Simulink中的电阻、电感、二极管和开关器件进行建模,然后通过连接和设置参数来完成整流器的搭建。
仿真过程中,可以设定输入信号,如交流电源电压,然后观察系统输出的变化。
通过分析仿真结果,可以评估系统的性能,并进行优化设计。
此外,Matlab还提供了丰富的信号处理和数据分析功能,可用于进一步对仿真结果进行处理和评估。
二、PWM控制技术的应用脉宽调制(PWM)是电力电子技术中常用的控制技术之一,在交流电机调速、逆变器和变频器等系统中广泛应用。
Matlab提供了PWM信号生成和分析的工具,可用于设计和调试PWM控制系统。
使用Matlab可以轻松生成不同调制方式的PWM信号,如基本的正弦PWM、三角边沿推挽PWM以及空间矢量调制PWM等。
通过设定合适的参数,如调制比和基波频率,可以满足不同系统的需求。
同时,Matlab还提供了查看和分析PWM信号的功能,如相位谱和频谱分析,帮助工程师们对PWM信号进行评估和优化。
三、电力电子器件特性分析与优化设计电力电子器件的特性分析和优化设计是电力电子工程中的重要环节。
Matlab提供了用于电力电子器件特性分析和优化设计的工具箱,如Power System Toolbox和Optimization Toolbox。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
单极性调制用一条正弦控制波与 一条在正弦波正半周的极性为正 、在正弦波负半周的极性为负的 等腰恒幅三角波进行比较,从而 得到SPWM波的调制方式
西南交通大学
6
Modeling and Simulation of Power Electronics System
Bipolar SPWM Technology
18
西南交通大学
三相桥式逆变器的结构
RECTIFIER DC LINK INVERTER
3-PHASE SUPPLY
3-Phase AC Load
19
西南交通大学
三相桥式SPWM逆变电路的控制
用一条等腰三角波与三条 幅值及频率相同但相位各 相差2/3的正弦波进行比 较,从而得到三个桥臂的 控制信号
20
西南交通大学
单极性PWM逆变器的建模
21
three_phase_SPWM.mdl
西南交通大学
线电压分析
线电压基波分量:
U AB(1) Ud ma 3 cos c t 2 3
线电压基波幅值:
U ABM(1) 3 maU d 2
线电压基波有效值:
U AB(1) 3 2 2 maU d 0.612maU d
西南交通大学
Modeling and Simulation of Power Electronics System
Single Polar SPWM
单极性SPWM (P172)
11
西南交通大学
单极性PWM
用一条等腰三角波与两条幅值及频率相同相位差180 的正弦波进行比较,两个桥臂是分开控制的,同一桥臂 上的两个开关在控制上仍然互补。在输出电压的半个周 期内,电压极性只在一个方向变化,故称为单极性控制
22
西南交通大学
Modeling and Simulation of Power Electronics System
Pulse Width Modulation (PWM) Technology
PWM调制方法
1 西南交通大学
PWM控制的基本原理
冲量相等而形状不同的窄脉冲加在具有 惯性的环节上时,其效果基本相同。
西南交通大学
3
正弦脉宽调制的实现
三角波—载波 正弦波—调制波 载波频率 fc 调制波频率 fr
通常三角波的频率与幅值固定, 正弦波的幅值与频率是调节量。
调制度——正弦信号的幅值与三角波信号的幅值之比称为 幅值调制比,用ma表示 。 载波比——三角波信号的频率与正弦控制信号的频率之比 称为频率调制比,用mf表示。 mf= fc /fr 改变正弦控制信号的幅值和频率就可以同时改变输出电压 中基波幅值和频率。 西南交通大学
单边调制与双边调制
锯齿波作载波时,一条边 垂直,只有一个边可调, 故称“单边调制”
5
采用等腰三角波作载 波,可实现“双边调 制”
西南交通大学
单极性与双极性PWM调制
双极性调制利用一个控制信号( 通常是正弦波,也称为调制波) 与一个较高频率的等腰三角波( 或称载波)相比较,以产生开关 的通断控制信号。
西南交通大学
15
线性调制——过调制——方波调制
当幅值调制比ma≤1时,输出 电压的基波分量随着ma的增 大而增大,称为线性调制 当ma>1后,基波电压与ma 间失去线性关系,称为过调制 随着ma的增大,输出电压波 形逐渐向方波演变,最终变成 方波模式
16 西南交通大学
讨论2
问题:载波和调制波的频率变化,SPWM波将如何变化? 改变频率调制比(载波比mf)
改变正弦信号的频率时,就改变了输出波形的频 率,也就同时改变了基波分量的频率。 载波比越大,输出波形所含的谐波分量越少。
17
西南交通大学
Modeling and Simulation of Power Electronics System
Three-Phase SPWM
三相SPWM (P189)
双极性SPWM (P165)
7
西南交通大学
双极性PWM
在双极性控制方式中,开关 T1、T3与T2、T4总是成对互 补的,输出电压uo在其半个 周期内,电压极性在两个极 性间变化,所以又称为“双 极性控制”
西南交通大学
双极性PWM逆变器的动画演示
9
西南交通大学
双极性PWM逆变器的建模
10
bipolar_SPWM.mdl
西南交通大学
单极性PWM逆变器的工作演示
13
西南交通大学
单极性PWM逆变器的建模
14
single_polar_SPWM.mdl
西南交通大学
讨论1
问题:调制度与载波比发生变化,SPWM波将如何变化? 改变幅值调制比(调制度ma )
改变正弦信号的幅值,就改变了输出波形的基波分 量的幅值 当ma在0~1之间变化时,输出波形的基波分量与 ma成线性关系。 过调制:当ma超过1后,脉冲宽度按正弦规律变化 的性质将被破坏,称为过调制。 实际上,正弦调制电压幅值不应超过三角波载波电 压的幅值,否则会使输出脉冲相连,造成贯穿短路
指窄脉冲的面积 指环节的输出响应波形基本相同
f (t)
f (t )
f (t)
f (t)
(t)
O
t
O
b)方波窄脉冲
t
O
c) 三角波窄脉冲
tOtFra biblioteka)单位冲击函数
d)正弦半波窄脉冲
形状不同而冲量相同的各种窄脉冲
西南交通大学
正弦脉宽调制(SPWM)的基本原理
脉宽调制是用脉冲宽度不等但 幅值相等的一系列矩形脉冲去 逼近一个所需要的电压或电流 波形。 将一个正弦半波N等分,将正 弦曲线每等分所包围的面积都 用一个与其面积相等的等幅矩 形脉冲代替,这样得到一串脉 冲高度不变但宽度按正弦规律 变化的脉冲列,这一过程称为 正弦脉宽调制(SPWM)