脉宽调制matlab仿真
6正弦波脉宽调制逆变器的MATLAB仿真
6 正弦波脉宽调制逆变器的MATLAB仿真6.1正弦波脉宽调制逆变器的原理和仿真模型6.1.1正弦波脉宽调制逆变器的原理由于期望的逆变器输出是一个正弦电压波形,可以把一个正弦半波分作N 等分。
然后把每一等分的正弦曲线与横轴所包围的面积都用个与此面积相等的等高矩形脉冲来代替,矩形脉冲的中点与正弦波每一等分的中点重合。
这样,由N 个等幅不等宽的矩形脉冲所组成的波形为正弦的半周等效。
同样,正弦波的负半周也可用相同的方法来等效。
这一系列脉冲波形就是所期望的逆变器输出SPWM波形。
由于各脉冲的幅值相等,所以逆变器可由恒定的直流电源供电,也就是说,这种交一直一交变频器中的整流器采用不可控的二极管整流器就可以了(见图6-1,6-2,6-3 )。
逆变器输出脉冲的幅值就是整流器的输出电压。
当逆变器各开关器件都是在理想状态下工作时,驱动相应开关器件的信号也应为与形状相似的一系列脉冲波形,这是很容易推断出来的。
从理论上讲,这一系列脉冲波形的宽度可以严格地用计算方法求得,作为控制逆变器中各开关器件通断的依据。
但较为实用的办法是引用通信技术中的“调制”这一概念,以所期望的波形(在这里是正弦波)作为调制波(ModulationWave ),而受它调制的信号称为载波(Carrier Wave )。
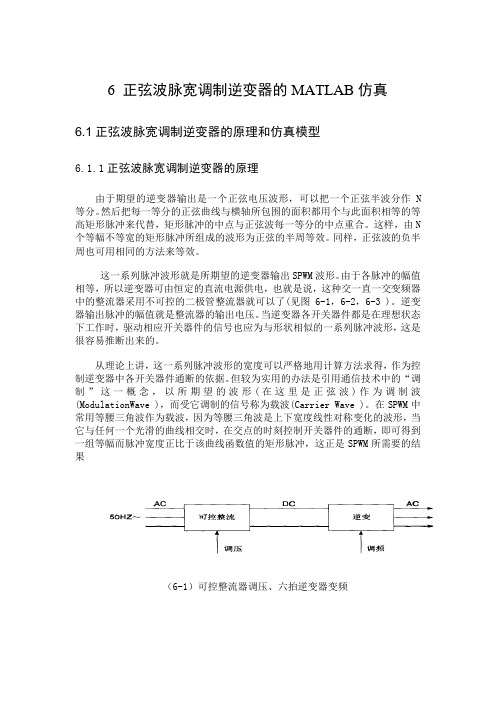
在SPWM中常用等腰三角波作为载波,因为等腰三角波是上下宽度线性对称变化的波形,当它与任何一个光滑的曲线相交时,在交点的时刻控制开关器件的通断,即可得到一组等幅而脉冲宽度正比于该曲线函数值的矩形脉冲,这正是SPWM所需要的结果(6-1)可控整流器调压、六拍逆变器变频(6-2)不控整流、斩波器调压、六拍逆变器变频(6-3)不控整流、PWM逆变器调压调频1.工作原理图6-4是SPWM变频器的主电路,图中VTl-VT6是逆变器的六个功率开关器件(在这里画的是IGBT),各由一个续流二极管反并联,整个逆变器由恒值直流电压U供电。
图6-5是它的控制电路,一组三相对称的正弦参考电压信号由参考信号发生器提供,其频率决定逆变器输出的基波频率,应在所要求的输出频率范围内可调。
基于MATLAB模拟调制系统的仿真设计
基于MATLAB模拟调制系统的仿真设计调制是无线通信系统中的重要环节,主要用于在传输信号过程中对信号进行编码和解码,以实现信号的传输和接收。
MATLAB作为一种强大的数学仿真工具,可以方便地进行调制系统的仿真设计。
调制系统一般包括三个主要部分:调制器、信道和解调器。
调制器负责将发送信号进行编码,以适应信道传输的需求;信道主要是指无线信号在传输过程中的传播环境,会受到各种影响,如多径效应、噪声等;解调器对接收到的信号进行解码,恢复出原始信号。
在MATLAB中,可以利用其信号处理、通信和仿真工具箱来进行调制系统的仿真设计。
以下是一个基于MATLAB的调制系统的仿真设计流程:1.确定调制方式:首先确定要使用的调制方式,比如常见的调制方式有调幅(AM)、调频(FM)、相位调制(PM)等。
根据需求选择合适的调制方式。
2.信号生成:使用MATLAB的信号处理工具箱生成原始信号。
可以选择不同的函数生成不同的信号,如正弦信号、方波信号、高斯脉冲等。
3.调制器设计:根据选择的调制方式,设计相应的调制器。
比如对于AM调制,可以通过将原始信号与载波进行乘法运算来实现;对于FM调制,可以通过改变载波频率的方式来实现。
在MATLAB中,可以使用相关函数来实现这些调制方式。
4.信号传输:将调制后的信号传输到信道中。
可以在仿真中模拟不同的信道情况,如加入噪声、多径效应等。
MATLAB提供了相关函数来模拟这些信道效应。
5.解调器设计:设计相应的解调器以恢复原始信号。
解调器的设计与调制器的设计相对应。
在MATLAB中,可以使用相关函数来实现解调器。
6.信号分析:对仿真结果进行分析。
可以通过绘制波形图、功率谱密度图等来观察信号在传输过程中的变化。
除了上述基本的仿真设计流程外,还可以在仿真过程中加入其他功能,如信号压缩、信号变换等。
MATLAB提供了大量的工具箱,可以方便地实现这些功能。
总之,基于MATLAB的调制系统仿真设计可以方便地模拟调制系统的工作过程,以及对不同信道效应的影响。
双闭环可逆直流脉宽PWM调速系统设计及MATLAB仿真验证

双闭环可逆直流脉宽PWM调速系统设计及MATLAB仿真目录目录 (1)中英文摘要 (2)摘要 (2)Abstract (2)正文 (3)双闭环可逆直流脉宽PWM调速系统设计 (3)设计分析 (3)主电路设计 (8)电流调节器参数计算 (9)信号产生电路 (11)GTR驱动电路原理 (12)辅助回路设计 (13)转速给定电路设计 (13)转速检测设计 (14)MATLAB仿真设计 (15)双闭环调速系统仿真框图 (15)仿真结果 (15)结果分析 (19)总结 (20)参考文献 (21)中英文摘要摘要直流电机由于具有速度控制容易,启、制动性能良好,且在宽范围内平滑调速等特点而在冶金、机械制造、轻工业等工业部门中得到广泛应用。
直流时机转速的控制方法可以分为两类,即励磁控制法与电枢电压控制法。
本文主要研究直流调速系统,它主要由三部分组成,包括控制部分、功率部分、直流电动机。
长期以来,直流电动机因其具有调节转速比较灵活、方法简单等特点,一直在传动领域占有统治地位。
本文对双闭环可逆直流PWM调速系统进行了较深入的研究,从直流调整系统原理出发,逐步建立了闭环直流PWM调整系统的模型。
AbstractWith dc motor speed control is easy, rev, braking performance is good, smooth and in wide range speed adjustment characteristics in metallurgy, machinery manufacturing, light industry, etc. Is widely used in the industrial sector. The rotational speed of dc timing control method can be divided into two categories, namely excitation control method with the armature voltage control method. This paper mainly studies the dc speed regulation system, it mainly consists of three parts, including parts, power control, direct current motor. For a long time, the dc motor because of its adjustment speed is more flexible, simple method and so on, have been occupied dominant position in the field of transmission.In this paper, the double closed-loop irreversible dc PWM speed regulating system, a further study from the principle of dc adjusting system, gradually establish a closed-loop dc PWM adjustment model of the system.正文双闭环可逆直流脉宽PWM调速系统设计设计分析双闭环调整系统的传动系统结构图直流PWM控制系统是直流脉宽调制式调速控制系统的简称,与晶闸管直流调速系统的区别在于用直流PWM变换器取代了晶闸管变流装置,作为系统的功率驱动器,系统构成原理图如下所示:直流PWM传动系统结构图其中属于脉宽调制调速系统主要由调制波发生器GM、脉宽调制器UPM、逻辑延时环节DLD和电力晶体管基极的驱动器GD和脉宽调制(PWM)变换器组成。
基于MATLAB/Simulink的电压空间矢量脉宽调制(SVPWM)逆变器的仿真

基于MATLAB/Simulink的电压空间矢量脉宽调制(SVPWM)逆变器的仿真基于MATLAB,Simulink的电压空间矢量脉宽调制(SVPWM)逆变器的仿真 .32-2001年第4期《电机电器技术》?计算机与自动控制?基于MATLAB/Simulink的电压空间矢量脉宽调制(SVPWM)逆变器的仿真王潞钢,陈林康(广东工业大学,广州510090)摘要:介绍了电压空间矢量脉宽调制(SVPWb1)技术,并对恒压频比且为同步调制时的SVpWbl,进行了细致的推导.最后详细讨论了如何用MATLAB中的 Simulink进行仿真的具体步骤.关键词:逆变器;电压空间矢量脉宽调制;仿真SVPWMInverterSireulationBasedon MATLAB/SimulinkWANGLa—gang,CHENLin—kAbstract:1KspaperintroducesthespacevectorPwM(SVPWM),anddeducesitwhen theoutputfrequencyisproportionaltothelinevoltageandthemodulafonissynchr o— nized.ThesimulationbySimulinkinMATLABisdiscussedindetail.Keywords:inve~ion;SVPWM;shm~fion 中图分类号:TP391.9文献标识码:A 1引言作为电力电子装置的核心技术,PWM技术被广泛地应用于变频调速电气传动中.技术中应用最为普遍的是正弦脉宽调制(SPW'M)和电压空间矢量脉宽调制(SVP.WM)相比SPWM而言,SVP~'2d具有更低的高次谐波和电压利用率高等优点,所以越来越受到人们的重视.在控制系统通用计算机仿真软件中, MathWorks公司的MATLAB软件最为流行. 它的Simulink工具箱是一种优秀的仿真软件,具有模块化,可重载,可封装,面向结构图编程以及高度可视化等特性.其最为显着的特点是,具有控制系统模型图形组态输入与仿真功能,只需在图形窗口画出所需分析,设计的控制系统方框图,软件本身就能对模型系统进行线性化处理与仿真.这一特点使得一个非常复杂系统的仿真建模变得相当容易. 文章编号:1004—0056[2001)04—0032一OO4 值得指出的是,M丑.AB/SimL1link具有开放的编程环境,它允许用户开发自己所需的模块, 可通过S—function模块和MATKM3提供的模板,用ICt,a2XAB或c语言程序来编出用户需要的复杂算法,比如SVPWM的算法. 28个空间矢量三相电压源逆变器可由图l所表示的6 个开关元件来等效表示.逆变器桥臂的上下开关元件在任何一时刻不能同时导通.不考虑死区时,上下桥臂的开关呈互逆状态. 圉1三相电压源逆变器模型u,v,W为输出的三相电压,以图l所示.计算机与自动控制?《电机电器技术》2001年第4期?33?1]刈2磁链空间矢量空间矢量的幅值为:当?为零矢量~-~,-(ooo)与?(111) 时.I?l-0当?为其余的六种有效矢量时j~-~,-j?亏??亏udcT空间矢量的空间位置如图2所示,两相邻有效矢量的夹角为60~.3电压空间矢量脉宽调制《SVPWM) 当三相电动机由三相对称余弦波电压供电时,根据文献1可知,磁链为一顺时针旋转的圆形,起始点在如图2所示的q轴的负方向,半径I{0==ul/~o(1)其中u为线电压,m为角速度.3.1有效矢量的空间分配图q轴负方向为旋转起点,顺时针旋转, 可得出六种有效矢量对应的空间分配图,如图3所示.在磁链空间中,每60.范围内由图 3所示的两种相邻有效矢量线性合成SVP- WM氨AlP…(i0n1/\础AlP"./\O.0}},/?,010)0l1)011)001)图3有效矢量的空间分配圈3.2空间矢量作用时间的推导图4如图4所示,在0.一60.空间范围内,例取,矢量?(100),m矢量?(110),则Tf 为矢量,作用时间,为矢量m作用时间. 本例中,设0为磁链旋转起点所对应的角度,?T为磁链旋转过?0角度时所对应的时间.对三角形~.ABC,由三角形正弦定理有五吾百芒五芒.i({一中)一sin(中._m(寻)34?2001耳第4期《电机电器技术》?计算机与自动控制?其中西=0+/"0/2=+<o/',T/2面=/2uT丽=?{ITmAC一~,T/2可推导得:TkATsin({.中)(2)Tm=kA%in(~)(3)其中k=拒/udc,代人式(1j得k=42u~/Uao零矢量作用时阅To=?T—Tj—Tm,其选取原则为选取使开关变化量最小的零矢量. T0的作用点(以0表示)简单起见,如图 4所示.需要注意下一段时问AT时,用的有效矢量的顺序相反了,为m矢量,矢量(如图4所示).这两段作用时阔2?T称为一个矢量周期,开关频率fs1.3.3V/F控制且同步调制时空间矢量作用时间考虑变压变频V/F控制时,不计电压补偿,输出频率f与线电压ul为比例关系(恒压频比):f=gUl其中g为比例系数,由此可容易推出: =V~2ut一=蠹设N=fJf为载波比则k/',T=2gua=青,所由式(2),(3)j, 得:耻如(})(4)盏如(西)(5)取N为6的倍数,此肘的SVqPWM为同步调制.计算在,6o.范围肉的中值t其它范围母的计算同此):=詈专={+2+吉={莆由上可知,值的大小只与N有关.所以由式(4),(5)可推得:保持"不变.当输出频率f与U为比例关系,且为同步调制时,TI 与T的大小仅与载波比N有关.若f与'同步变化,则TI与Tm太小不变.4MATLAB仿真实现在整个MA?AB/simulink仿真过程中, 只需要三个独立的输入变量:输出频率f,同步载波比N(一定要是6的倍数),等效直流电压u这些都可以用恒值输出模块(ODD. stailt)来手工赋值,可添加一个S—function模块来编程实现当N不是6的倍数时的自动整定.仿真步骤:T1'a,取以享()为周期的单边三角渡为时向基数,如图5所示.可用MAT. LAB中的S—function模块来自行构造,例程如下:在S—function模块附带的模板中的函数functionsys=mdloutputs(t,x,u)里添加:1'1 =floor((/2));sys=t—n*2;即可实现图5的三角载波.?计算机与自动控制?《电机电器技术》2001年第4期?35?b,在一个作用周期T2完成后,按公式 (4),(5)计算_rl,的值c,用一开关变量(例如,设定onoff=0或 1)来实现:在下一段作用周期/2来临时, 做出如图5所标出的有效作用矢量顺序的自动切换.d,当时间来临时,判断上一时刻的有效输出(用状态量来保存),从而确定输出的零矢量是?(000)还是/,,-,it(111) e,每隔磁链空间印.,即N/6个_r口后,按表(1)换取一对有效矢量.此时中重新置零,则,T2,L.的值仍可按公式(4),(5)来计算.此时运行Simulink时,MA?.AB的Coin. maud窗口会提示正在使用的是离散时间解题器(dieretetimesolver).推荐使用固定步长 (fixed—step),可以估算一下,例取f=10,, =lkHz时,最小的有效矢量的持续时问为1. 6,若选用变步长(variable—step),最大步长 (maxstepsize)选用auto时,若平滑因子refine factor不是足够的大时,会出现丢失有效矢量的现象,所以固定步长虽然速度慢一些,但设定的恰当,肯定不会出现丢失有效矢量的现象.取f=2(】,N=48,图6为0,0.008秒问,开关sasbs的输出图形:S一Sb—S囝6f,若对图6的三个输出加上三个积分器,进行3—2变换后,可绘出svPwM所形成的圆形磁链轨迹.因为此时整个仿真系统是由离散系统与连续系统的合成的混合系统, 推荐在固定步长(fLxed—step)中选取odel (euler)即可.仍取f=20Hz,N=48,磁链如图 O05115225囝7g,选用静止—B建立起来的电动机等效模型,电机参数:极对数P=2,L=0.844H,Lt=086H,=0.795H,=1.2n,R=0.0312,转动惯量J=0.004k~.取f= 20Fh,N=48,g=7.6,U=700V,恒转矩负载TL=1.9Nm,可得出转速曲线图8. t)圈85结论本文对电压空间矢量调制(SVPWM)在恒压频比且为同步调制时进行了细致的推导.并详细讨论了如何用MATLAB中的 Simulink进行仿真的步骤与注意事项,所得出的SVPWM输出开关图,磁链图,转速曲线图等都与实际相吻合,具有很高的参考价值参考文献:[1]吴守箴等电气传动蚋脉宽调制技术机械工业出版杜.1995.[2]Ymarai.NewPvnnmethodforfullydigitledinvertem.IEEETRANSIA.1987[3:施阳国等语言精要厦动态仿真工具 SIMELINK.西北工,l大学出版牡1997.口。
PWM脉宽直流调速系统设计及matlab仿真验证
PWM脉宽直流调速系统设计及matlab仿真验证————————————————————————————————作者:————————————————————————————————日期:目录1.MATLAB简介 (3)3系统设计及参数计算 (5)3.1系统总体设计 (5)3.1.1 H型双极式PWM原理 (5)3.1。
2双闭环调速系统结构图 (7)3.1。
3双闭环调速系统启动过程分析 (8)3。
2电流调节器设计及参数计算 (9)3。
3转速调节器设计及参数计算 (11)4 MATLAB仿真验证 (14)4.1稳定运行时电流环突然断线仿真分析 (14)参考文献 (19)PWM脉宽直流调速系统设计及matlab仿真验证1.MATLAB简介MATLAB是由美国mathworks公司发布的主要面对科学计算、可视化以及交互式程序设计的高科技计算环境。
它将数值分析、矩阵计算科学数据可视化以及非线性动态系统的建模和仿真等诸多强大功能集成在一个易于使用的视窗环境中,为科学研究、工程设计以及必须进行有效数值计算的众多科学提供了一种全面的解决方案,并在很大程度上摆脱了传统非交互式程序设计语言的编辑模式,代表了当今国际科学计算软件的先进水平。
[MATLAB和MATHEMATICA、MAPLE并称为三大数学软件。
它在数学类科技应用软件中在数值计算方面首屈一指。
MATLAB的基本数据单位是矩阵,它的指令表达式与数学、工程中常用的形式十分相似,故用MATLAB来解算问题要比用C,FORTRAN等语言完成相同的事情简捷得多,并且MATLAB也吸收了像MAPLE等软件的优点,使MATLAB成为一个强大的数学软件。
2 设计分析直流双闭环调速系统调节器包括转速调节器(ASR)和电流调节器(ACR),从而分别引入了转速负反馈和电流负反馈以调节转速和电流,二者之间实行串级连接.把转速调节器的输出当作电流调节器的输入,再用电流调节器的输出去控制电力电子变换器UPE。
PWM脉宽调制直流调速系统设计及MATLAB仿真验证

PWM 脉宽调制直流调速系统设计及MATLAB 仿真验证第一章 系统概述1.1 设计目的1. 掌握转速,电流双闭环控制的双极式PWM 直流调速原理。
2. 掌握并熟练运用MATLAB 对系统进行仿真。
1.2 设计题目转速,电流双闭环控制的H 型双极式PWM 直流调速系统,已知:直流电动机:48, 3.7,200/min,nom nom nom U V I A n r ===允许过载倍数λ=2;时间常数:L T =0.015s ,m T =0.2s ;PWM 环节的放大倍数:S K =4.8,;电枢回路总电阻:R=3Ω;电枢电阻Ra=2Ω。
调节器输入输出电压**nm im U U ==10V.采用MATLAB 对双闭环系统进行仿真,绘制直流调速系统(Id=const )稳定运行时转速环突然断线(1、有ACR 限幅值;2、无ACR 限幅值)仿真框图,仿真得出启动转速,起动电流,直流电压Ud ,ASR,ACR 输出电压的波形。
并对结果进行分析。
1.3 设计内容1 简述设计题目及对题目的分析;2 简述双极式PWM 直流调速系统原理;3 简述电流环,转速环的控制原理;4 对电流环、转速环的参数进行计算选取;5 根据电流环、转速换的参数进行MATLAB 仿真;第二章 转速、电流双闭环式的双极式PWM 直流调速系统2.1 双极式PWM 调速原理可逆PWM 变换器主电路有多种形式,最常用的是桥式(亦称H 形)电路,如图2-1所示,电动机M 两端电压AB U 的极性随全控型电力电子器件的开关状态而改变。
图2-1 桥式可逆PWM 变换电路双极式控制可逆PWM 变换器的四个驱动电压的关系是:1423g g g g U U U U ==-=-。
在一个开关周期内,当0≤t<on t 时 ,AB S U U =,电枢电流id 沿回路1流通;当on t ≤t<T 时,驱动电压反号,id 沿回路2经二极管续流,AB S U U =-。
调制解调的Matlab仿真实现

调制解调的Matlab仿真实现摘要在通信过程中,调制与解调占有十分重要的地位。
假如没有调制与解调技术,就没有通信,没有广播和电视,也没有今天的BP 寻呼、手持电话、传真、电脑通信及Internet 国际互联网。
本设计是基于MATLAB来实现调制与解调的仿真。
主要设计思想是利用MATLAB 这个强大的数学软件工具方便快捷灵活的功能实现模拟调制解调中的幅度调制和角度调制及数字调制解调中的FSK和DPSK的调制解调设计。
首先,先介绍这几种模拟和数字调制解调的产生、频谱、解调等过程及原理,接着就编写相应的m文件先后对模拟调制中的幅度调制和角度调制里面的频率调制的进行仿真,并对仿真得出调试及仿真结果并进行分析。
FM调制的时候是让基带信号去控制振荡电路的频率,AM是用基带信号去控制载波的幅度。
无论哪一种调制方式,采用相干解调的性能优于非相干解调的性能。
而且D PSK可以消除PSK的“倒 ”现象。
DPSK的系统性能要优于FSK系统。
相干系统要求本地载波与发送信号之间保持同步,否则误码率增加。
因此,在高质量的数字通信系统中多采用相干解调,而对抗噪声性能要求不高的就采用较为简单的非相干解调。
关键词:MA TLAB;调制解调;AM;FM;FSK;DPSKSIMULATION OF MODEM IN MATlABABSTRACTIn the communication process, modulation and demodulation is very important position. If there is no modulation and demodulation technology, there is no communication, no radio and television, nor did the BP pager, handheld phone, fax, computer communications and Internet Internet.The design is based on MATLAB to achieve modulation and demodulation of the simulation. The main design idea is the use of MATLAB software, this powerful mathematical tool for convenient and flexible function for analog modulation and demodulation of amplitude modulation and angle modulation and digital modulation and demodulation of FSK and DPSK modem design. First of all, to introduce these types of analog and digital modulation and demodulation of the resulting spectrum, demodulator,etc. Then the preparation of the corresponding document has m analog modulation of the amplitude modulation and angle modulation frequency modulation inside the simulation, and simulation debugging and simulation results obtained and analyzed.FM modulation is the time base-band signal to control the frequency of oscillator circuit, AM base-band signals used to control the range of carrier. No matter what kind of modulation, the use of the performance of coherent demodulation is superior to the performance of non-coherent demodulation. DPSK can remove the "anti-π" phenomenon of PSK. DPSK system performance is superior to FSK system. The local carrier coherent system requirements and to maintain synchronization between the transmitted signal, Otherwise, increase the bit error rate. So, In high-quality digital communication systems use coherent demodulation, and noise performance of low-resistance on the use of relatively simple non-coherent demodulation.Key words: matlab; modem; am; fm; fsk; dpsk目录1 绪论 (1)1.1 课题发展的现状 (1)1.2 课题研究的内容和目的 (2)1.3 课题研究的步骤 (2)2 调制解调原理 (3)2.1 实现AM的调制解调的原理 (3)2.2 实现FM的调制解调的原理 (4)2.3 实现FSK的调制解调的原理 (6)2.4 实现DPSK的调制解调的原理 (8)3 调制与解调的MATLAB仿真实现 (10)3.1 仿真工具MATLAB的介绍 (10)3.1.1 MATLAB软件 (10)3.1.2 M文件 (11)3.2 AM的仿真实现 (11)3.2.1 未加噪声时的AM调制解调 (11)3.2.2 叠加噪声时的AM调制解调 (13)3.2.3 AM系统的抗噪声性能 (16)3.3 FM的仿真实现 (17)3.3.1 未加噪声的FM解调实现 (17)3.3.2 叠加噪声时的FM解调 (20)3.4 FSK的调制解调的实现 (23)3.4.1 FSK调制实现 (23)3.4.2 FSK相干解调实现 (25)3.5 DPSK的调制解调的实现 (26)4 总结 (28)参考文献 (31)附录 (33)附录A (33)附录B (36)附录C (38)附录D (40)附件1 开题报告 (42)附件2 译文和原文影印件 (49)1 绪论1.1课题发展的现状调制在通信系统中具有重要的作用。
基于MATLAB模拟调制系统的仿真设计
基于MATLAB模拟调制系统的仿真设计摘要:本文基于MATLAB平台,通过建立调制系统的仿真模型,实现了对调制系统的仿真设计。
首先对调制系统的基本原理进行了介绍,然后建立了调制系统的数学模型。
接着使用MATLAB对模型进行了仿真分析,包括调制信号的产生、载波信号的产生、调制信号与载波信号的混合调制、调制后的信号的传输等过程。
最后,通过仿真结果的分析,对调制系统的性能进行了评估,并提出了优化方案。
本文的研究对于调制系统的设计和优化具有一定的参考意义。
关键词:调制系统;MATLAB仿真;混合调制;性能评估;优化方案一、引言调制是无线通信中的一项基本技术,通过将信息信号与载波信号进行合成,使信息信号能够被传输到远距离的通信接收端。
调制系统是实现调制技术的关键,其性能直接影响到通信系统的可靠性和传输质量。
因此,对调制系统的研究和优化具有重要的意义。
二、调制系统的基本原理调制系统的基本原理是将信息信号经过调制器与载波信号进行混合调制,形成调制后的信号。
调制过程中,需要考虑到载波频率、调制信号幅度、调制信号频率等参数的选择。
常见的调制方式有幅度调制(AM)、频率调制(FM)、相位调制(PM)等。
三、调制系统的数学模型调制系统的数学模型是根据调制原理建立的,一般可表示为:$s(t) = A_c \cdot (1 + m \cdot \cos(f_m \cdot t)) \cdot\cos(f_c \cdot t)$其中,$s(t)$表示调制后的信号,$A_c$为载波幅度,$m$为调制系数,$f_m$为调制信号频率,$f_c$为载波频率。
四、MATLAB仿真设计4.1调制信号的产生通过MATLAB生成调制信号,并将其绘制出来,以便后续的仿真分析。
4.2载波信号的产生通过MATLAB生成载波信号,并将其绘制出来,以便后续的仿真分析。
4.3调制信号与载波信号的混合调制将调制信号与载波信号进行混合调制,并将调制后的信号绘制出来,以便后续的仿真分析。
基于MATLAB的脉宽调制(PWM,SPWM,SVPWM)

第1章绪论1.1 脉宽调制技术的研究背景——电气传动的发展随着电力电子技术、微处理器技术的发展以及材料技术尤其是永磁材料技术的进步,电气传动系统,包括交、直流电动机调速及伺服系统,正在向系统高性能、控制数字化、一体化机电的方向发展。
直流传动系统控制简单、调速特性好,一直是调速传动领域中的重要组成部分。
现代的直流传动系统的发展方向是电动机主极永磁化及换向无刷化,而无刷直流电动机正是在这样的趋势下所发展起来的机电一体化电动机系统。
一般意义上的无刷直流电动机(Bruhless DC Motor,BLDCM)是指方波无刷直流电动机,其特征是只需简单的开关位置信号即可通过逆变桥驱动永磁电动机工作。
1975年无刷直流电动机首次出现在NASA报告中。
之后,由于高性能、低成本的第三代永磁材料的出现,以及大功率、全控型功率器件的出现,使无刷直流电动机系统获得了迅速的发展。
1977年,出现了采用钐钻永磁材料的无刷直流电动机。
之后不久,无刷直流电动机系统开始广泛采用高磁能积、高矫顽力、低成本的第三代NdFeB永磁材料,且采用霍尔元件作位置传感器,采用三相全桥驱动方式,以提高输出转矩,使其更加实用。
1986年,H.R.Bolton对方波无刷直流电动机系统进行了全面的总结,这标志着方波无刷直流电动机系统在理论上、驱动控制方法上已基本成熟。
近年来,虽然永磁直流电动机也随着永磁材料技术的发展而得到了性能的提高,依然在直流传动系统中被广泛应用,但直流传动系统已经处于无刷直流电动机大规模普及与应用的阶段。
现代交流传动系统已经由感应电动机为主发展为多机种,尤其是以永磁同步电动机的发展最为显著。
一方面,由感应电动机构成的交流调速系统性能依然不断提高,变压变频(VVVF)技术及矢量控制技术完全成熟。
通过模仿直流电动机中转矩控制的思路,采用坐标变换,把交流感应电动机的定子电流分解成励磁分量和转矩分量,并通过对磁通和转矩的独立控制、使感应电动机获得类似直流电动机的控制特性。
PWM脉宽直流调速系统设计及matlab仿真验证
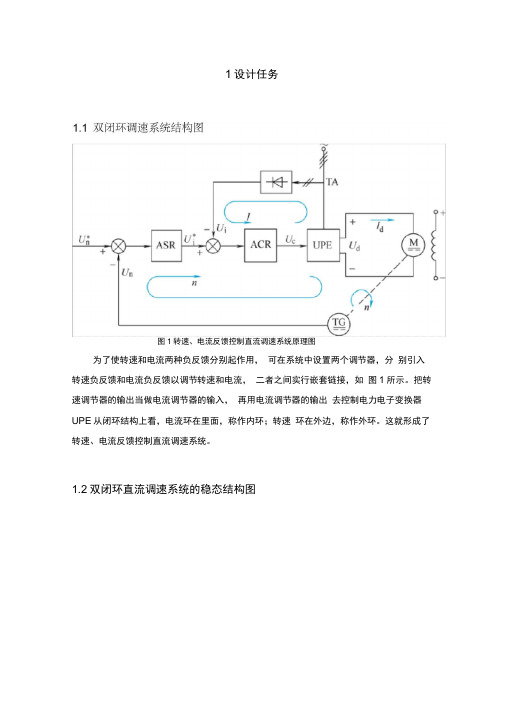
1设计任务图1转速、电流反馈控制直流调速系统原理图为了使转速和电流两种负反馈分别起作用,可在系统中设置两个调节器,分别引入转速负反馈和电流负反馈以调节转速和电流,二者之间实行嵌套链接,如图1所示。
把转速调节器的输出当做电流调节器的输入,再用电流调节器的输出去控制电力电子变换器UPE从闭环结构上看,电流环在里面,称作内环;转速环在外边,称作外环。
这就形成了转速、电流反馈控制直流调速系统。
1.2双闭环直流调速系统的稳态结构图双闭环直流调速系统的稳态结构图如图2所示,两个调节器均采用带限幅作用的PI 调节器。
转速调节器ASR的输出限幅电压U m决定了电流给定的最大值,电流调节器ACR的输出限幅电压U cm限制了电力电子变换器的最大输出电压Udm。
当调节器饱和时,输出打到限幅值,输入量的变化不再影响输出,除非有反向的输入信号使调节器退出饱和。
当调节器不饱和时,PI调节器工作在线性调节状态,其作用是使输入偏差电压U在稳态时为零。
为了实现电流的实时控制和快速跟随,希望电流调节器不要进入饱和状态,因此对于静特性来说,只有转速调节器饱和与不饱和两种情况。
1.3双闭环直流调速系统的动态结构图图3双闭环直流调速系统的动态结构图双闭环直流调速系统的动态结构图如图3所示,图中W ASR(S)和W ACR(S)分别表示转速调节和电流调节器的传递函数双闭环直流调速系统起动过程的转速和电流波形如图所示如图4所示,电机的起动过程中转速调节器 ASF 经历了不饱和、饱和、退饱 和三种情况:第I 阶段(0-b )是电流上升阶段;第U 阶段(t i -t 2)是恒流升速阶段;第 川阶段(t2以后)是转速调节阶段双闭环直流调速系统的起动过程有以下三个特点:1) 饱和非线性控制 2) 转速超调 3) 准时间最优控制1.4系统参数选取1.4.1整流电路平均失控时间常数T s设定PWM 勺开关频率为1KH z ,故H 型双极式PWM8流的调制周期为:T=1/f=0.001s 1.4.2电流滤波时间常数和转速滤波常数H 桥式电路每个波头的时间为°.5ms,为了基本滤平波头,应有 (1 ~ 2)T oi 0.5ms ,因此取 T oi 0.0004s 。
SVPWM控制算法MATLAB仿真
摘要随着全控型快速半导体自开关器件和智能型高速微控制芯片的发展,使得数字化PWM成为PWM控制技术发展的趋势。
但是传统的SPWM法比较适合模拟电路实现,不适应于现代电力电子技术数字化的发展趋势。
电压空间矢量脉宽调制(Space Vector Pulse Width Modulation,简称SVPWM)控制技术是一种优化了的PWM控制技术,和传统的PWM法相比,不但具有直流利用率高(比传统的SPWM 法提高了约15%),输出谐波少,控制方法简单等优点,而且易于实现数字化。
本文首先对脉宽调制技术的发展现状进行了综述,在此基础上分析了电压空间矢量脉宽调制技术的发展现状,接着对空间电压矢量脉宽调制技术(SVPWM)的基本原理进行了详细的分析和推导。
最后介绍了SVPWM的基本原理及其传统的实现算法,并通过SVPWM的算法构建了Matlab/Simulink仿真模型,仿真结果验证了该算法的正确性和可行性。
关键字:空间矢量脉宽调制;仿真;建模;算法;Matlab/SimulinkAbstractTogether with the continual development of all-controlled fast semiconductor self-turn-off devices and intelligent high speed micro-control chip, the digitized PWM is becoming the trend of PWM control technique development .However, the traditional SPWM method is more suitable for analog circuits, and the traditional SPWM can not adapt to the development trend of the digitization of the modem power and electric.Space-vector pulse width modulation (SVPWM)is a kind of superiorized PWM control technique: achieving the effective utilization of the DC supply voltage(compared with the traditional SPWM, reduced by 15.47%), having little harmonic output and the easy control method, furthermore easy to realize the digitization.The article presents the developing condition of PWM and SVPWM firstly.The theory of SVPWM is discussed in detail.Finally, the basic principle of SVPWM and the traditional algorithm are introduced, and constructing Matlab/Simulink simulation model by SVPWM algorithm .In the end, the simulation on results verifies the correctness and feasibility of the algorithm.Keywords:svpwm;simulation;modeling;algorithm;Matlab/Simulink目录摘 要 (1)Abstract (2)目录 (3)第一章 概述 (4)1.1 MA TLAB 动态仿真工具SIMULINK 简介 (4)1.2 SVPWM 的控制算法 (5)1.3 参考电压矢量ref U 所处扇区N 的判断 (7)第二章 SVPWM 控制算法分析 (10)2.1 常规SVPWM 模式下,计算Y X T T , (10)2.2计算A ,B ,C 三相相应的开关时间321,,cm cm cm T T T (12)第三章 SVPWM 的SIMULINK 实现 (13)3.1SVPWM 控制算法原理图 (13)第四章 SVPWM 的SIMULINK 仿真结果 (18)4.1 波形图 (18)总 结 (20)参考文献 (21)第一章概述1.1 MATLAB动态仿真工具SIMULINK简介随着控制理论和控制系统的迅速发展,对控制效果的要求越来越高,控制算法也越来越复杂,因而控制器的设计也越来越困难。
6正弦波脉宽调制逆变器的MATLAB仿真
6 正弦波脉宽调制逆变器的MATLAB仿真6.1正弦波脉宽调制逆变器的原理和仿真模型6.1.1正弦波脉宽调制逆变器的原理由于期望的逆变器输出是一个正弦电压波形,可以把一个正弦半波分作N 等分。
然后把每一等分的正弦曲线与横轴所包围的面积都用个与此面积相等的等高矩形脉冲来代替,矩形脉冲的中点与正弦波每一等分的中点重合。
这样,由N 个等幅不等宽的矩形脉冲所组成的波形为正弦的半周等效。
同样,正弦波的负半周也可用相同的方法来等效。
这一系列脉冲波形就是所期望的逆变器输出SPWM波形。
由于各脉冲的幅值相等,所以逆变器可由恒定的直流电源供电,也就是说,这种交一直一交变频器中的整流器采用不可控的二极管整流器就可以了(见图6-1,6-2,6-3 )。
逆变器输出脉冲的幅值就是整流器的输出电压。
当逆变器各开关器件都是在理想状态下工作时,驱动相应开关器件的信号也应为与形状相似的一系列脉冲波形,这是很容易推断出来的。
从理论上讲,这一系列脉冲波形的宽度可以严格地用计算方法求得,作为控制逆变器中各开关器件通断的依据。
但较为实用的办法是引用通信技术中的“调制”这一概念,以所期望的波形(在这里是正弦波)作为调制波(ModulationWave ),而受它调制的信号称为载波(Carrier Wave )。
在SPWM中常用等腰三角波作为载波,因为等腰三角波是上下宽度线性对称变化的波形,当它与任何一个光滑的曲线相交时,在交点的时刻控制开关器件的通断,即可得到一组等幅而脉冲宽度正比于该曲线函数值的矩形脉冲,这正是SPWM所需要的结果(6-1)可控整流器调压、六拍逆变器变频(6-2)不控整流、斩波器调压、六拍逆变器变频(6-3)不控整流、PWM逆变器调压调频1.工作原理图6-4是SPWM变频器的主电路,图中VTl-VT6是逆变器的六个功率开关器件(在这里画的是IGBT),各由一个续流二极管反并联,整个逆变器由恒值直流电压U供电。
图6-5是它的控制电路,一组三相对称的正弦参考电压信号由参考信号发生器提供,其频率决定逆变器输出的基波频率,应在所要求的输出频率范围内可调。
基于MATLAB的脉宽调制(PWM,SPWM,SVPWM)
第1章绪论1.1 脉宽调制技术的研究背景——电气传动的发展随着电力电子技术、微处理器技术的发展以及材料技术尤其是永磁材料技术的进步,电气传动系统,包括交、直流电动机调速及伺服系统,正在向系统高性能、控制数字化、一体化机电的方向发展。
直流传动系统控制简单、调速特性好,一直是调速传动领域中的重要组成部分。
现代的直流传动系统的发展方向是电动机主极永磁化及换向无刷化,而无刷直流电动机正是在这样的趋势下所发展起来的机电一体化电动机系统。
一般意义上的无刷直流电动机(Bruhless DC Motor,BLDCM)是指方波无刷直流电动机,其特征是只需简单的开关位置信号即可通过逆变桥驱动永磁电动机工作。
1975年无刷直流电动机首次出现在NASA报告中。
之后,由于高性能、低成本的第三代永磁材料的出现,以及大功率、全控型功率器件的出现,使无刷直流电动机系统获得了迅速的发展。
1977年,出现了采用钐钻永磁材料的无刷直流电动机。
之后不久,无刷直流电动机系统开始广泛采用高磁能积、高矫顽力、低成本的第三代NdFeB永磁材料,且采用霍尔元件作位置传感器,采用三相全桥驱动方式,以提高输出转矩,使其更加实用。
1986年,H.R.Bolton对方波无刷直流电动机系统进行了全面的总结,这标志着方波无刷直流电动机系统在理论上、驱动控制方法上已基本成熟。
近年来,虽然永磁直流电动机也随着永磁材料技术的发展而得到了性能的提高,依然在直流传动系统中被广泛应用,但直流传动系统已经处于无刷直流电动机大规模普及与应用的阶段。
现代交流传动系统已经由感应电动机为主发展为多机种,尤其是以永磁同步电动机的发展最为显著。
一方面,由感应电动机构成的交流调速系统性能依然不断提高,变压变频(VVVF)技术及矢量控制技术完全成熟。
通过模仿直流电动机中转矩控制的思路,采用坐标变换,把交流感应电动机的定子电流分解成励磁分量和转矩分量,并通过对磁通和转矩的独立控制、使感应电动机获得类似直流电动机的控制特性。
基于matlab直流脉宽调速系统仿真研究

内蒙古科技大学控制系统仿真设计说明书题目:直流脉宽调速系统仿真研究学生姓名:学号:专业:测控技术与仪器班级:测控08—1班从七十年代开始,由于晶闸管直流调速系统的高效、无噪音和快速响应等优点而得到广泛应用。
采用PI调节的单个转速闭环直流调速系统可以在保证系统稳定的前提下实现转速无静差。
但是,如果对系统的动态性能要求高,例如要求快速启制动,突加负载动态速降等等,单闭环系统就难以满足需要。
这是因为单闭环系统不能随心所欲的控制电流和转矩的动态过程。
双闭环直流调速系统是一个典型的系统,该系统一般含晶闸管可控整流主电路、移相控制电路、转速电流双闭环调速控制电路、以及缺相和过流保护电路等.给定信号为0~10V直流信号,可对主电路输出电压进行平滑调节。
采用双PI调节器,可获得良好的动静态效果。
电流环校正成典型I型系统。
为使系统在阶跃扰动时无稳态误差,并具有较好的抗扰性能,速度环设计成典型Ⅱ型系统。
根据转速、电流双闭环调速系统的设计方法,用Simulink做了带电流变化率内环的三环直流调速系统进行仿真综合调试,分析系统的动态性能,并进行校正,得出正确的仿真波形图。
关键词:MATLAB;直流调速;双闭环;转速调节器;电流调节器;干扰摘要 (II)第一章前言 (1)1.1 直流电动机简介 (1)第二章总体方案设计 (2)2.1 技术要求 (2)2.2 设计方案的选择 (2)2.3 直流电动机的数学模型 (3)第三章直流调速双闭环控制系统仿真 (5)3.1 闭环直流调速控制系统介绍 (5)3.2 电流调节器的设计 (5)3.2.1 电流环结构框图的化简 (5)3.2.2 电流调节器结构的选择 (6)3.2.3 确定时间常数 (6)3.2.4 选择电流调节器结构 (7)3.2.5 校验近似条件 (7)3.2.6 计算调节器电阻和电容 (8)3.3 速度调节器设计 (8)3.3.1 确定时间常数 (9)3.3.2 选择转速调节器结构 (9)3.3.3 计算转速调节器参数 (10)3.3.4 校验近似条件 (10)3.3.5 计算调节器电阻和电容 (10)3.3.6 校核转速超调量 (11)第四章系统建模及仿真 (12)4.1 MATLAB仿真软件介绍 (12)4.2 仿真建模及实验 (12)4.3 双闭环仿真实验 (12)4.4 仿真波形分析 (14)第五章系统过程 (16)5.1 实验内容 (16)第六章总结 (17)第一章前言1.1 直流电动机简介直流电动机具有良好的起、制动性能,宜于在广泛范围内平滑调速,在轧钢机、矿井卷扬机、挖掘机、海洋钻机、金属切削机床、造纸机、高层电梯等需要高性能可控电力拖动的领域中得到了广泛的应用。
电力电子实验三

分析电路的工作原理,并画出电路图。
2. 熟悉 SimPowerSystems 的功能模块,灵活运用,举一反三练习。
实验要求:
1. 熟悉 Matlab 的电力系统仿真集成工具 SimPowerSystems 的使用方法;
2. 独立建立仿真模型;
3. 进行参数设置;
4. 独立完成仿真实验内容。
实验内容及步骤:
一)新用到的元件提取路径: SimPowerSystems/Extra Library/ Discrete Control Blocks/ Discrete 1-phase PLL SimPowerSystems/Extra Library/ Discrete Control Blocks/ Discrete 3-phase PWM Generator SimPowerSystems/Extra Library/ Discrete Control Blocks/Discrete 3-phase Programmable Source SimPowerSystems/Power Electronics/ Three-Level Bridge SimPowerSystems/Extra Library/Three-Phase Library/ Three-phase Linear Transformer 12-terminals SimPowerSystems/Elements/ 3-Phase Parallel RLC Load Simulink/ Signal Routing/Bus Creator SimPowerSystems/Connectots/Bus Bar (thin horiz)
分析实验结果:
设置仿真时间为:0.1s、采用 ode23s (stiff/Mod. Rosenbrock)算法。
PWM脉宽直流调速系统设计及matlab仿真验证

PWM脉宽直流调速系统设计及matlab仿真验证摘要双闭环(电流环、转速环)调速系统是一种当前应用广泛的电力传动系统。
它具有动态响应快、抗干扰能力强等优点。
反馈闭环控制系统具有良好的抗扰性能,它对于被反馈环的前向通道上的一切扰动作用都能有效的加以抑制。
采用转速负反馈和PI调节器的单闭环的调速系统可以在保证系统稳定的前提下实现转速无差。
但如果对系统的动态性能要求较高,例如要求起制动、突加负载动态速降较小等,单闭环系统就难以满足要求。
这主要是因为在单闭环系统中不能完全按照需要来控制动态过程的电流或转矩。
在单闭环系统中,只有电流截止负反馈环节是专门用来控制电流的。
但它只是在超过临界电流值以后,强烈的负反馈作用限制电流的冲击,并不能很理想的控制电流的动态波形。
在实际工作中,我们希望在电机最大电流限制的条件下,充分利用电机的允许过载能力,最好是在过度过程中始终保持电流(转矩)为允许最大值,使电力拖动系统尽可能用最大的加速度启动,达到稳定转速后,又让电流立即降下来,使转矩马上与负载相平衡,从而转入稳态运行。
这时,启动电流成方波形,而转速是线性增长的。
这是在最大电流转矩条件下调速系统所能得到的最快启动过程。
关键字:PWM脉宽直流调速 matlab仿真Abstract:Dual closed loop speed control system is a widely used electric power transmission system (current loop, speed loop). It has the advantages of fast dynamic response, anti-interference ability. The feedback loop control system has a good anti-interference performance, it is for all the perturbation effects on the prior to the passage of the feedback loop can be effectively suppressed. Single negative feedback and PI regulator speed closed-loop speed control system can guarantee the system stability under the premise of speed without error. But if the higher requirements of the dynamic performance of the system, such as requiring braking, sudden load dynamic downhill smaller, single closed-loop system would be difficult to meet the requirements. This is primarily because in a single closed-loop system is notcompletely in accordance with the need to control the current or torque of the dynamic process. Single closed-loop system, the only the current deadline negative feedback link is designed to control current. But it is only after more than the critical current value, a strong negative feedback effect limit the impact of the current, and is not very satisfactory control current dynamic waveform. We hope that the maximum current limit of the motor under the conditions, make full use of the motor allows overload capacity, it is best to always keep in the over-the process of current (torque) to allow the maximum, so that the electric drive system as much as possible in the actual work, start with the greatest acceleration, reach a steady speed, letting the current immediately down the torque immediately be balanced with the load, and thus transferred to the steady-state operation. At this time, the starting current square-wave, while the speed is linear growth. This is a speed control system under conditions of maximum current torque can get the fastest boot process.Keywords: PWM pulse width DC speed matlab imitationPWM脉宽直流调速系统设计及matlab仿真验证1设计任务1.1双闭环调速系统结构图图1 转速、电流反馈控制直流调速系统原理图为了使转速和电流两种负反馈分别起作用,可在系统中设置两个调节器,分别引入转速负反馈和电流负反馈以调节转速和电流,二者之间实行嵌套链接,如图1所示。
基于Matlab脉宽调制方法的研究

三相逆变电路的SPWM
U ab1 Ud
0.612M
第5页/共28页
用MATLAB对三相桥式逆变电路进行仿真
第6页/共28页
SPWM仿真结果-线电压
当Ud=250V,M=08时,线电压 基波为:
U ab1 0.612MU d 0.612 0.8 250 122.4V
第7页/共28页
主要内容
1
SPWM原理分析
2
SVPWM原理分析
3
仿真模块搭建
4
仿真结果和分析
第1页/共28页
PWM控制原理
• PWM(Pulse Width Modulation)控制就是对脉冲的宽度进行调制的技 术。即通过对一系列脉冲的宽度进行调制,来等效地获得所需要的波形(含 形状和幅值)。
第2页/共28页
PWM控制技术的重要理论基础
原则
使每一次的开关切换只涉及一个开关,降低开关频率
七段空间矢量合成方式
均以零矢量(000)开始和结束,中间用零矢量(111), 其余时间有效矢量合理安排
TS
零矢量 (000)
矢量A
矢量B
零矢量 (111)
矢量B
零矢量 矢量A (000)
第15页/共28页
以1扇区为例
Tx、Ty两个非零矢量的作用时间
第19页/共28页
Click to edit title style
致谢
在本篇论文即将完成之时,在此要感谢我的导师XXX老师,本 论文是在XXX的悉心指导下完成的。XXX认真负责的态度、治学严 谨的精神激励着我,使我获益匪浅。 感谢学院里给与我帮助的老师和同学,感谢你们为我所做的一切。 最后我衷心的感谢各位老师和同学,并致以我崇高的敬意和美好的 祝愿!祝愿大家身体健康,工作顺利,学业进步。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
中国为何陷入1956-1976之迷茫二十年?
1949年建国之初,中国的经济层面有这样一组数据:1亿户小农经济,并且由于长时间的社会动荡,经济脆弱,民生凋敝,生产水平和前代相比,仍是二牛抬犁的状况(在现在的农村,这种情况仍相当普遍),工业基础只是起步。
全民唯一可以自豪的是:我们是自己的主人,我们满腔热情,我们信心满满。
在这样的基础之上,中国如何强国?在这个问题上,民族开始了痛苦的探索历程。
从1951年到1956年,中国在恢复生产与经济发展方面做出了巨大努力,并取得相当大的成就,完成了经济的“社会主义改造”。
就经济现实来看,这一段时期应该是对当时中国经济各业(主流还是自给自足农业)的修复与发展,并同时发展与建设新生行业。
在经济的发展与延伸——即在中国各业很好地得以恢复之后,进而跨入现代之多元立体交互的网状经济模式(市场经济)时,以共产党为代表的决策层,没有将巨大而古老又富有朝气的中国顺势带入现代国家的行列,或者更确切的讲,全国人民都没有做好进入现代国家的准备,没有对现代国家形成比较理性客观的认识,也没有这方面的打算,相关的人才储备与培养都没有进行。
一切因素都要等待历史的再准备。
事实上,当时的中国面临二难抉择:
在政治地位上翻身的农民对现代经济模式几乎一无所知,而借鉴西方现代经济手段与经验至少有两方面的冲突:一、国外列强为了发展多元经济,在从19世纪初、中期开始到20世纪中期的100多年的时间里,对中国极尽蹂躏之能事,从而使全民几代人都对西方充满敌视,包括其经济形式,这方面以美国与日本为代表。
二、几千年受到奴役与压迫的中华民族因马克思主义的思想指导而得到解放,但是没有深入地转变经济形式,而片面地对社会主义性质的盲目固持,致使“眼睛里揉不下沙子”,当时国人认为借鉴西方资本主义性质的经济手段意味着放弃社会主义,而再次陷入剥削与压迫的苦海深渊。
受尽几千年官僚、地主压迫,与近代西方列强侵凌和中国新官僚买办资本家剥削的中国百姓,在拒绝了西方的社会模式的同时,将整个现代经济形式也一并置入否决之列,尽管西方经济模式不足以整个地代表现代经济理念,但当时,我们似乎没有看的这么远。
最为主要的是整个中国的经济仍以农业为主、分散生产,对发展多元经济并使之合理交换以刺激经济增长之认识麻木,从经济基础和观念都没有准备好,关于现代国家之方向模糊。
熟悉中国历史的毛泽东应该隐约感觉到中国已经过早来到了“历史周期律”的节点——中国历朝历代的自给自足经济发展到顶峰的时候,就会走下坡路。
西汉武帝时代、隋文帝杨坚时期、大唐开元盛世时期、大清康乾盛世时期,这些最著名的盛世之后,国家都迅速衰弱并解体。
毛泽东应该有这种深层的恐慌,不然不能解释他何以要一再不切实际地“鼓励”人民积极性搞生产并默许全国性地吹牛皮——一向实事求是的他认为不能伤害人民积极性,过段时间一切会好起来;并祭起他的第一法宝“民主”(当年在延安时期,他回答黄炎培如何摆脱历史周期律时所说)。
毛泽东依赖人民的团结与积极性建立了新中国,他深信再次人民的积极性与“民主”也可以摆脱历史周期律,让中国实现质的飞跃。
由于忽视了基本的经济规律,也忽视了民主的基本基础——市场经济,所以中国不仅搞乱了经济也搞乱了民主(人民的生活方式与基本观念都不具备民主的要求)。
事实上,这些在当时也不可能被认识。
在1956年-1966年这10年的努力过后,中国经济不增反降,固执的毛泽东认为人民思想实现还未转化,需要深度洗礼,于是中国进入了“文革”。
综上,在创造财富,增强经济实力的愿望力驱动下,中国自然而然地忽略了现代经济的诸多要素(即在保证各业能自由公平交换的基础上,刺激各业的再发展,而产生整个经济的繁荣局面。
国家承认并支持私人资产,银行业和保险业加入到经济发展与保障经济风险的行列。
使各方面的人才各自优化集中,以提高经济单元的经济效益与竞争力,闲置资金被尽量用于投资。
用民法约束在经济上普遍发生关联的个人之间的关系),而在自给自足经济的基础上,在国家计划调配下,开始了使得经济持续增长的“征程”!
所以,尽管中国做了各个方面主观的努力,却只能导致“浮夸风”、“大跃进”、“文革”等一拨未平,一拨又起的社会混乱。
在一方面竭力保持认识粗浅的社会主义性质(就是可以自给自足地生活!)的同时,幻想在经济实效方面达到盲干之后的预期效果,发展到全国上下的互吹互擂,进而发展到相互攻击的地步。
但经济现实却是不会哄人的,中国在最基本的问题上的认识不清,乱了方寸后,自酿了惨痛的恶果。
由于中国推迟了进入市场经济的时间,所以也就推迟了人民充实到人民政权框架的时间。
但是,历史的形成都有其深刻的原因在,主要是思想观念的滞后,推迟了这一进程——社会是社会结构与思想体系的双变合体。
1956年到1976年,中国最根本的目的是在保持“社会主义”性质(不转变国家“计划”统摄下的“自给自足”经济;生活观念也还是“自给自足”观念;以盲目的“人民民主”给其“镀色”)的前提下,把经济搞上去,增强国家力量。
我们说过,人民民主只有发展市场经济才有真正实现的可能,因为其真正实现还需要用相应的思想体系来引导,以提升民主的程度——实现真正的人民政权。
所以中国的经济走向迂回曲折了二十年,影响到人民政权的建设也滞后了二十年,思想体系的建设也是如此——中国的社会整体前进滞后了。
这是历史的必经之路,谁也不能在如此复杂的局面影响下,将视界准确地拓向未来。
1956年到1966年间,中国最基本的问题是想在茫然强国的愿望驱使下,想借助全民建设社会主义的积极性、发挥全民的力量,在不改变经济模式(仍旧是自给自足经济)的情况下,把经济搞上去!确实,在之前,正是借助全民的积极性,使得中国走完艰苦的武装革命历程。
但此时,把全民积极性等量代换到经济层面时,却导致了刚恢复的经济层面出现大紊乱。
发展经济得尊重经济自身的规律,高效的现代经济必须要在优化发展各业的基础上,建立完善的市场交换体制,从而刺激各业的再投资,使价值增值,“因天下力生天下财——王安石”。
将所有因素忽视,那只能造成南辕北辙的结果。
1966年到1976年,传统上称之为“文革”时期,由于前一个“十年”内经济上的盲动,又牵涉到文化层面,力图通过思想文化的整肃和提升、转变而渡过难关,从而将盲动的范围与“无序度”增大。
造成整个国家的“十年浩劫”。
56年——66年,中国陷入经济层面的盲动,66年——76年,又将盲动的范围扩大到思想文化领域。
此后的两年,是面对盲动之后的一片狼藉而归总教训、理性反思的时间。
关于社会主义性质的问题、及经济现代化的问题,在78年十一届三中全会之后,我国终于逐渐回到冷静、客观的立场上来(以传统自给自足
生活观念支持的“社会主义”激情趋向衰落)予以面对,开始在重视经济现实的基础上,逐渐正视经济规律,解放思想、谋求发展。