一种超小型水下推进器的研究与开发
海底采矿机器人研发生产方案(二)

海底采矿机器人研发生产方案一、实施背景随着陆地矿产资源的日益枯竭,海洋成为新的矿产资源发掘地。
据统计,海洋中蕴藏的矿产资源是陆地的数十倍,尤其是海底的矿产资源,具有极高的开采价值。
但是,由于海底环境的复杂性和不可预测性,传统的海底采矿技术面临诸多挑战。
因此,研发海底采矿机器人成为解决这一问题的关键。
二、工作原理海底采矿机器人主要由以下几个部分组成:1.水下推进系统:该系统由一组高性能的推进器组成,能够在各种水深条件下稳定运行,同时保证机器人的灵活性和稳定性。
2.感知与导航系统:该系统集成了多种传感器,如水深传感器、水温传感器、流速传感器等,能够实时感知并反馈海底环境信息,实现精准定位和导航。
3.机械臂与采集系统:配备高精度机械臂,可抓取和搬运各种重物;采集系统则负责将采集的矿产资源运送上岸。
4.能源供应系统:采用长效锂电池供电,同时设计有太阳能板和水力发电机作为备用能源。
三、实施计划步骤1.研发阶段:进行技术研究和产品设计,包括水下推进系统、感知与导航系统、机械臂与采集系统的设计和集成。
2.实验测试阶段:在实验水池和近海实际环境中进行机器人性能测试,不断优化各项性能指标。
3.生产制造阶段:批量生产机器人,并进行实地部署和调试。
4.商业推广阶段:与矿产公司和海洋资源开发公司合作,推广和应用海底采矿机器人。
四、适用范围本研发生产方案适用于以下情况:1.矿产资源勘探:机器人可深入海底勘探矿产资源分布情况,为后续开采提供数据支持。
2.海底矿产采集:根据前期勘探结果,机器人可进行高效率的矿产采集工作。
3.海洋环境监测:利用机器人的感知与导航系统,实时监测海底环境变化,预防自然灾害。
五、创新要点1.集成化的水下推进系统:实现了在复杂海底环境下的稳定运行和灵活操作。
2.精准的感知与导航系统:确保了机器人的精准定位和导航,大大提高了采矿效率。
3.高效的机械臂与采集系统:能够快速地抓取和搬运矿产资源,提高了采矿速度。
水下机器人技术的研究现状及应用前景
水下机器人技术的研究现状及应用前景近年来,随着科技的不断进步,水下机器人成为了重要的科技研究领域之一。
这项技术的应用广泛,其技术难度也逐渐提高。
在海洋资源的开发、环境保护、科学研究、军事防御等方面,水下机器人都有着广泛的应用前景。
本文将重点介绍水下机器人技术的研究现状及其应用前景。
一、水下机器人的发展历程水下机器人是指可以在水下执行各种任务的机器人,包括潜水器和自主运动水下机器人。
它主要由机械臂、推进器、计算机控制系统、感应器等部分组成。
水下机器人自问世以来,经历了几个历程。
20世纪70年代,水下机器人主要用于海洋科学研究和救援任务。
但由于原材料稀缺、科技水平不高,水下机器人的生产成本非常高,同时该技术也只在美国和苏联这两个国家中得到应用。
20世纪80年代中期,水下机器人技术得到了飞速发展,尤其是计算机和传感器技术的进步,使得机器人的智能化程度得到了很大提高。
随着水下机器人技术的飞速发展,它的应用范围也逐渐扩大,包括海洋资源勘测、管线巡检、深海采矿、海底油气勘探等。
21世纪以来,随着深海研究和资源勘探任务的不断增加,水下机器人技术又得到了快速发展。
人们开始制造大型、高效、自主控制的水下机器人,例如蛟龙号、深海勇士号等。
这些水下机器人的应用范围更为广泛,技术也更加成熟。
二、水下机器人技术的研究现状目前,水下机器人的研究主要集中在以下几个方面:1. 感应器技术水下机器人的感应器技术是指通过不同的感应器来获取水下信息,包括声纳、激光雷达、高清相机、水下磁力计等。
随着感应器技术的不断进步,水下机器人的探测能力也在不断提高。
2. 自主控制技术自主控制技术是指水下机器人具备自主学习和决策的能力,能够自主规划路径、避障、完成任务等。
自主控制技术可以大大提高水下机器人的执行能力。
3. 能源技术水下机器人的能源技术主要包括传统化石能源、太阳能以及海底热能等。
在当今环保的大趋势下,太阳能和海底热能技术更为可持续且环保。
水下机器人的设计及动力学建模

水下机器人的设计及动力学建模水下机器人是一种能够在水下执行各种任务的自主移动机器人,它在海洋科学研究、水下勘探、海底资源开发等领域具有重要的应用价值。
本文将探讨水下机器人的设计及动力学建模,以期深入了解其原理和技术。
一、水下机器人的设计要点水下机器人的设计要点包括机体结构、推进器、电力系统和控制系统。
机体结构通常采用防水材料,并具有抗压性能,以确保在深海环境下的正常运行。
推进器是水下机器人的动力来源,常见的推进方式包括涡轮推进器、喷水推进器和螺旋桨推进器等。
电力系统则需要满足机器人长时间工作的需求,通常采用锂电池或氢燃料电池。
控制系统则是水下机器人的大脑,通过传感器获取环境信息,并根据预设的任务执行算法,实现机器人的自主控制。
二、水下机器人的动力学建模水下机器人的动力学建模是指建立机器人在水下环境中的运动方程和动力学特性模型。
动力学模型对水下机器人的运动和控制具有重要的指导作用。
常用的动力学方法包括牛顿运动定律、流体动力学和控制理论等。
在建立动力学模型时,首先需要考虑水下机器人的质量、惯性矩阵和力矩阵。
质量通常通过对机械结构进行建模,计算机模拟可以辅助计算。
惯性矩阵则是描述机器人在旋转运动时的惯性特性。
力矩阵则包括机器人的操作力矩和环境力矩,通常通过测力传感器获取。
其次,还需要考虑水下机器人与环境的相互作用。
水下环境中存在水流和水压等因素对机器人运动的影响,流体动力学是解决这一问题的关键。
通过建立动态压力平衡方程和运动方程,并结合流体力学原理,可以分析水下机器人在水中的稳定性和操控性。
最后,在动力学建模中,还需要考虑控制系统的设计和算法。
控制系统的设计与动力学模型紧密相关,合理的控制策略可以提高水下机器人的运动性能和稳定性。
常用的控制方法包括PID控制、模糊控制和自适应控制等。
三、水下机器人的应用前景水下机器人的应用前景广阔,具有重要的科研和商业价值。
在海洋科学研究领域,水下机器人可以用于海洋生物调查、水文数据采集和海洋环境监测等。
新型水下集成电机推进装置的泵喷射推进器结构原理及特点分析 (1)
分体结构,质量和体积大,总效率较低,且噪声很
大,航迹比较明显。近年,国外出现了一种新型动 力电机和泵喷射推进器结构一体化的水下推进装
置一一集成电机推进器(IMP一一Integrated Motor
统,也可用于其他水下航行器的动力推进。
Propulsor)
0
IMP 最初由美海军水下作战中心和
周围的静压,推迟了叶梢空泡的起始。 3) 操纵性
导管加厚,对整个流场产生影响。因此在设计时 应注意对流场的分析,优化设计结构。
(2) 在设计中,泵喷射推进器需要足够大的 过流面积,这就对电机的定子辄、转子辄和磁极的
厚度有一定的限制O
(3) 电机工作在水中,因此要做好电机导线
和绕组部分的绝缘工作,同时还要考虑密封问题。
件下,推进泵的流量在鱼雷不同航速下的变化并
置传感器的无刷电机。
3
3.1
泵喷射推进技术发展与应用
泵喷射推进技术发展
不大。这和普通的螺旋桨有很大区别。导管的另 一个优点是它可以保护转子不受一般海沙石的损 害,在极区航行时避免冰块的损害。
由于导管可使叶片安装在端部而不会减小推 力,因此喷射泵直径比同等级敞开式螺旋桨的直 径要小得多 O 此外,由于喷射泵的导管限制了转 子和定子的运行范围,这就使在优化设计低噪声
该充分的利用这部分被带入的流体中的能量。根
据牛顿第二定律和牛顿第二定律,可以在螺旋桨 周围适当的设置一个管道(导管) ,利用被带入的
使螺旋桨的效率大大降低。泵喷射推进技术中采 用了导管技术。导管不仅分割流场还会起到推 力增值的作用。同时导管的存在可以有效地利用
流体对其做功产生额外推力 [4]O 这就是泵喷射
水下机器人技术的研究及应用
水下机器人技术的研究及应用一、引言随着科技的发展,水下机器人技术逐渐成为研究热点,水下机器人技术具有重要的军事和民用价值。
水下机器人在深海探测、海洋环境监测、潜艇打捞、海底管道维修、海底采矿等领域拥有广阔的应用前景。
本文将介绍水下机器人的相关技术和应用。
二、水下机器人技术的研究1. 基础技术水下机器人的基本结构包括机械结构、推进器、电力系统、控制系统和传感器等,其中机械结构是机器人最基本的组成部分。
同时,水下机器人还需要具备足够的航行能力和自主控制能力才能完成各项任务。
推进器分为螺旋桨、翼型、喷水推进器等多种类型,电力系统则需要充分考虑水下运行的特殊环境。
传感器是水下机器人的“眼睛”和“耳朵”,可以通过声学、光电等方式感知周围环境。
2. 遥控技术水下机器人通常由地面遥控台掌控,遥控技术的发展对水下机器人的研究和应用至关重要。
目前,水下机器人遥控技术主要采用有线和无线遥控方式,无线遥控方式又分为声学和电磁两种。
有线遥控方式适用于近海和浅海环境,而无线遥控方式则可以覆盖更远的距离。
3. 自主控制技术自主控制技术是水下机器人发展的重要方向,可以使机器人具备更高的灵活性和自主性。
自主控制技术主要包括自主导航和自主探测等方面。
水下机器人需要进行自主导航以完成复杂的任务,其技术包括导航软件研发、传感器融合和位置估计等方面。
三、水下机器人应用1. 深海探测水下机器人在深海探测中具有良好的应用前景,可以对深海生物、深海地形和海洋底层资源等进行调查和勘探。
我国自主研发的“海龙”号载人潜水器、神舟号载人深潜器和深海鱼类等水下机器人在深海探测方面已经取得了重要的进展。
2. 海洋环境监测水下机器人可以通过配备一定的传感器来对海洋环境进行实时监测,包括水温、盐度、流速等参数。
这些数据对于海洋环境保护和气象预报等方面具有重要的作用。
3. 潜艇打捞海洋中漂浮的物品,如海底沉船、船只和飞机残骸等由于环境复杂、深海水压大等问题,传统的打捞方法难以实现,此时水下机器人就可以发挥重要的作用。
一种船用无轴轮缘推进器的设计研究

一种船用无轴轮缘推进器的设计研究设计研究报告:船用无轴轮缘推进器一、引言船舶推进器是船舶动力系统中的重要组成部分,直接影响船舶的航行性能,特别是在船舶的速度、操纵性和节能性方面具有重要的作用。
无轴轮缘推进器是一种新型的船舶推进器,能够有效减少水流对轮缘的阻力,提高推进效率,减小船舶耗能,因此备受关注。
本文将对船用无轴轮缘推进器的设计研究进行详细讨论。
二、传统轮缘推进器的缺陷及无轴轮缘推进器的优势传统的轮缘推进器存在一些缺陷,例如轮缘表面存在船体表面阻力、漩涡损失和压力波损失等问题,导致推进效率低下。
而无轴轮缘推进器采用了全新的推进原理,能够减少水流对轮缘的阻力,提高推进效率,降低能耗,具有较大的优势。
三、无轴轮缘推进器的结构和工作原理无轴轮缘推进器由轮缘、扁平薄壁等组成。
其工作原理是利用薄壁的特性,在扁平薄壁的阻挡面上产生对水流的引导作用,从而达到推进的目的。
该设计有效减少了水流对轮缘的阻力,提高了推进效率。
四、无轴轮缘推进器的设计要点1.轮缘的形状设计:要设计适合水流流动的轮缘形状,减小水流对轮缘的阻力;2.薄壁的选择:要选择适合的薄壁材料,既要保证薄壁的强度,又要保证轻盈的特性;3.轮缘与扁平薄壁的组合设计:要充分考虑轮缘与扁平薄壁之间的结合方式,确保结构牢固、无漏水;4.推进效率的优化设计:要通过有效的流体动力学分析与计算,优化推进器的设计,提高推进效率。
五、实验验证通过实验验证,无轴轮缘推进器的推进效率明显优于传统轮缘推进器,在不同船速下,无轴轮缘推进器的能耗明显减小,推进效率提高。
六、结论无轴轮缘推进器是一种具有较大发展潜力的船舶推进器,其推进原理新颖、推进效率显著提高。
通过合理的设计和优化,可以进一步提高无轴轮缘推进器的性能,为船舶的节能减排提供重要支持。
综上所述,船用无轴轮缘推进器的设计研究具有重要的意义和价值,有望成为未来船舶推进器的重要发展方向。
希望本文能够对相关领域的研究者和工程师们有所启发,激发更多创新思路,推动该领域的发展和进步。
一种基于微小型水下机器人推进器的控制系统设计

一
、
引言
控 制 系 统 是 水 下机 器 人 的 重 要 组 成 部 分 ,其 性 能 的 优 劣 直 接 关 系 到 机器 人 的 运 转 及 水 下 作 业 的准 确 性 。设 计 一 款 响 应 迅速 、性 能 稳 定 的 控 制 系 统 ,是 保 证 水 下 机 器 人 安 全 的需 要 , 也 是 提 升 其 工 作 效 率 的 必 然 选 择 。微 小 型 水 下 机 器 人 体 积 小 巧 、 机 动 灵 活 、 成 本 低 廉 、 搭 载 方 便 , 已成 为 水 下 系 统 装 备 中 不 可 或 缺 的 组 成 部 分 。现 在 已广 泛 应 用 于 堤 坝 、大 型 水 罐 、 河 道 、 浅 海 等 环 境 监 测 工 作 中 。嵌 入 式 计 算 机 具 有 系 统 精 简 、 实 时 性 高 、 专 用 性 强 等 特 点 ,能 够 出色 的 完成 数 据 采 集 、 网络 通 信 等 任 务 ,将 其 安 装 在 水 下 机 器 人 上 ,充 分 发 挥 嵌 入 式 系 统 体 积 小 、 功 耗 低 的优 势 ,对 微 小 型水 下机 器 人
—
2 通 信 程 序 设 计 .
式中U 表示电 a 机端电 I表示电 压,a 机电流, a ∑R是电
机 电路 总 电阻 。为 每 级 磁 通 量 ( WB) C 为 电机 常 数 。 , e
控 制 程 序 分 为 水 面 平 台 控 制 程 序 和 水 下 机 器 人 执 行 程 序 。 水 面 平 台 控 制 程 序 主 要 完成 操 纵 杆 数 据 的采 集 ,并 使 用
几种水下推进器的介绍与超小型水下推进器开发设计说明
几种水下推进器装置水下机器人又称为水下无人潜器,分为遥控、半自治及自治型。
水下机器人是典型的军民两用技术,不仅可用于海上资源的勘探和开发,而且在海战中也有不可替代的作用。
为了争夺制海权,各国都在开发各种用途的水下机器人。
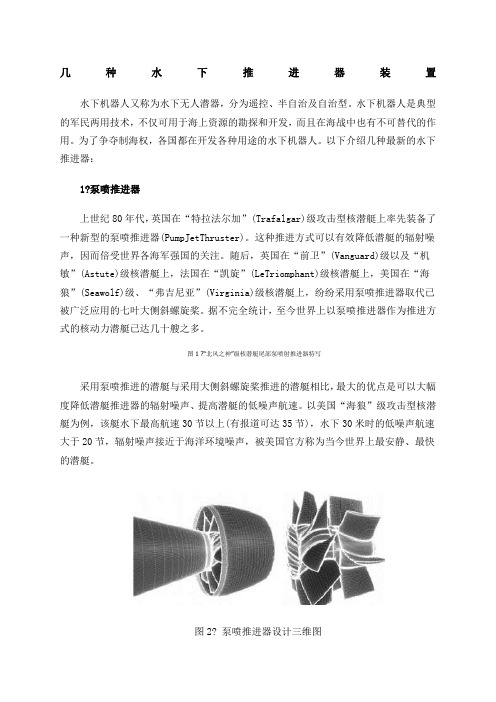
以下介绍几种最新的水下推进器:1 泵喷推进器上世纪80年代,英国在“特拉法尔加”(Trafalgar)级攻击型核潜艇上率先装备了一种新型的泵喷推进器(PumpJetThruster)。
这种推进方式可以有效降低潜艇的辐射噪声,因而倍受世界各海军强国的关注。
随后,英国在“前卫”(Vanguard)级以及“机敏”(Astute)级核潜艇上,法国在“凯旋”(LeTriomphant)级核潜艇上,美国在“海狼”(Seawolf)级、“弗吉尼亚”(Virginia)级核潜艇上,纷纷采用泵喷推进器取代已被广泛应用的七叶大侧斜螺旋桨。
据不完全统计,至今世界上以泵喷推进器作为推进方式的核动力潜艇已达几十艘之多。
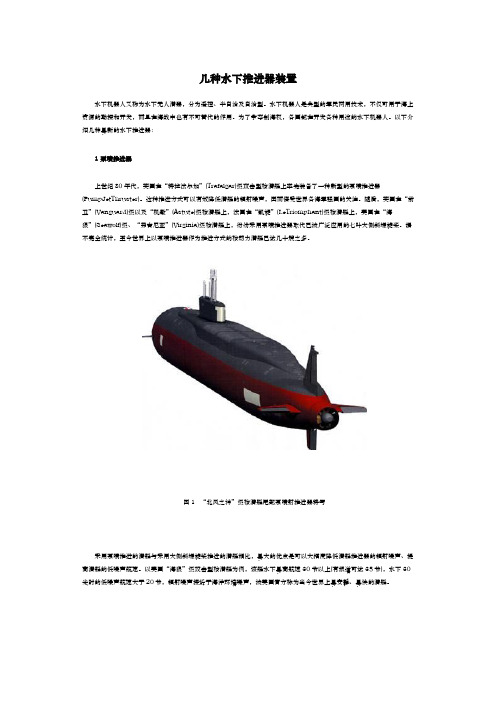
图1 “北风之神”级核潜艇尾部泵喷射推进器特写采用泵喷推进的潜艇与采用大侧斜螺旋桨推进的潜艇相比,最大的优点是可以大幅度降低潜艇推进器的辐射噪声、提高潜艇的低噪声航速。
以美国“海狼”级攻击型核潜艇为例,该艇水下最高航速30节以上(有报道可达35节),水下30米时的低噪声航速大于20节,辐射噪声接近于海洋环境噪声,被美国官方称为当今世界上最安静、最快的潜艇。
图2 泵喷推进器设计三维图随着声探测技术的飞速进步,在未来海战中,核潜艇的声隐身性能将是决定战斗胜负的关键,努力降低核潜艇的噪声必将成为潜艇研究的主要课题,而推进器是核潜艇的一个主要噪声源,低噪声推进器的研究和应用势在必行。
因此,具有低噪声优势的泵喷推进器,将成为未来几十年核潜艇推进器的一个重要发展方向。
2 WT系列蛙人助推器武汉维纳凯朴工程技术有限公司生产的商用水下推进器(DPV),也叫蛙人助推器,是潜水爱好者或者特种部队进行潜水航行的重要援助手段之一,广受国内外使用者的青睐。
一种小型水下机器人平台的设计与实现
一种小型水下机器人平台的设计与实现1. 引言1.1 背景介绍水下机器人是一种能在水下环境中执行任务的自主机器人,近年来受到越来越多的关注和研究。
随着海洋资源的日益枯竭和海洋环境的日益恶化,水下机器人的应用需求不断增长。
水下机器人可用于海洋科学研究、海底资源勘探、海底管道检测与维护等领域,具有广阔的应用前景。
传统的水下机器人平台大多体积庞大、成本高昂,操作复杂,限制了其在某些特定环境下的应用。
设计一种小型水下机器人平台成为了目前研究的热点之一。
小型水下机器人平台体积小、便于携带、操作简单,可以在狭窄的水下空间中自由穿梭,适用范围更广。
本文将重点介绍一种小型水下机器人平台的设计与实现,旨在研究其硬件系统设计、软件系统设计、实验验证和性能分析,以期为未来小型水下机器人的研究和开发提供参考。
【引言结束】1.2 研究意义小型水下机器人平台可以实现对不同水下环境的快速响应和灵活适应,能够在狭小空间下进行精准操作,有助于提高工作效率和作业质量。
小型水下机器人平台在海洋勘测和海洋科学研究中具有较高的适用性,能够实现海底地形测绘、水下探测等任务,有助于拓展海洋科学研究的深度和广度。
小型水下机器人平台可以应用于海洋资源的勘探和开发领域,为海洋经济的发展提供技术支持。
研究和设计一种小型水下机器人平台能够推动海洋技术的发展,促进海洋资源的合理开发利用,具有重要的科研和应用价值。
对小型水下机器人平台的设计与实现具有重要意义,有助于推动相关领域的发展和进步。
2. 正文2.1 水下机器人平台设计要点1. 压力防水设计:水下机器人在深海中工作需要承受极大的水压,因此平台的设计必须考虑到防水性能。
选择高强度、耐腐蚀的材料,并进行严密的密封设计,确保机器人内部能够长时间稳定工作。
2. 浮力控制系统:水下机器人需要确保在水下能够保持平衡并进行稳定的潜行。
设计一个高效的浮力控制系统,可以通过调整进气或排水量来实现机器人在水中的浮力平衡,从而提高机器人在水中的灵活性和稳定性。
水下航行器对转螺旋桨用双转子永磁推进电机研究
水下航行器对转螺旋桨用双转子永磁推进电机研究水下航行器是一种能够在水中自主航行的机器人,有着广泛的应用领域。
在水下环境中,传统的燃油推进技术面临着许多问题,例如能源供应的限制、噪声污染、对水下生态的破坏等。
因此,如何开发高效、低噪声的水下航行器成为了水下技术研究的一大挑战。
转螺旋桨是一种高效的水下推进器,广泛应用于水下航行器、潜水器等领域。
在传统的转螺旋桨推进系统中,通常采用柴油发动机或燃气涡轮发动机作为动力源,用机械传动的方式将动力传递到螺旋桨上,推动水下航行器前进。
然而,这种传统的推进系统存在一些问题,例如噪声大、污染严重、耗能高等。
为了克服这些问题,研究者们开始尝试使用电动推进系统。
在电动推进系统中,通过电机将电能转化为动力,驱动转螺旋桨转动,从而推动水下航行器前进。
电动推进系统比传统的机械传动推进系统具有许多优点,例如启动快速、噪声低、环保等,因此在水下航行器领域受到了广泛关注。
双转子永磁推进电机是一种高效、低噪声的电动推进系统。
在这种电动推进系统中,通过使用两个转子和一个定子的结构,将电能转化为机械能。
转子上采用永磁材料,可在无需外部磁场的情况下产生磁通。
与传统感应电机相比,双转子永磁推进电机具有响应速度快、效率高、结构紧凑等优点。
同时,在使用这种电机时,也能够将其与转螺旋桨相结合,形成一种高效的、低噪声的水下推进系统。
使用双转子永磁推进电机作为水下航行器的推进系统,不仅可以实现高效的推进,同时也能够降低水下环境中的噪声污染,保护水下生态环境。
这种推进系统具有启动快速、响应速度快、维护成本低等优点,因此在水下航行器领域十分有前景。
总之,双转子永磁推进电机是一种高效、低噪声的水下推进系统,在水下航行器的开发中具有重要的应用价值。
未来,随着技术的不断发展,这种推进系统将会得到更广泛的应用,并成为水下技术研究的重要一环。
以下是关于转螺旋桨用双转子永磁推进电机的相关数据:1.效率:双转子永磁推进电机的效率高达95%以上,远高于传统的机械传动推进系统,大大降低了能源消耗并提高了推进效率。
专业水下推进器推荐信(3篇)

第1篇尊敬的[接收方姓名或机构名称]:您好!在此,我非常荣幸地向您推荐一款专业水下推进器——[推进器型号]。
作为一名长期从事水下探测、作业和研究的专业人士,我对这款推进器有着深刻的了解和高度的评价。
以下是我对这款推进器的详细推荐理由:一、技术先进,性能卓越[推进器型号]采用国际领先的水下推进技术,具有以下特点:1. 高效节能:该推进器采用先进的推进电机和高效的水泵,能够在保证强劲推力的同时,实现低能耗,有效降低运营成本。
2. 高可靠性:推进器采用高品质材料,经过严格的质量控制,确保在复杂的水下环境中长期稳定运行。
3. 强大的推力:该推进器能够提供强大的推力,满足各类水下作业的需求,如水下航行、水下挖掘、水下救援等。
4. 智能控制:推进器具备智能控制系统,可根据作业需求自动调整推进力和转向,提高作业效率。
二、适用范围广泛,满足多种水下作业需求[推进器型号]适用于以下领域:1. 水下航行:可为水下机器人、潜水器等提供稳定的推进力,实现远距离航行。
2. 水下挖掘:适用于海底油气资源开发、海底隧道建设等水下挖掘作业。
3. 水下救援:可为救援人员提供快速、稳定的推进力,提高救援效率。
4. 水下探测:适用于海洋地质、海洋生物等水下探测领域。
三、优质售后服务,保障用户权益1. 售前咨询:我们提供专业的技术支持,根据用户需求推荐合适的推进器型号。
2. 售中服务:提供安装、调试、培训等服务,确保用户顺利使用。
3. 售后保障:提供全面的售后服务,包括备件供应、维修保养等,确保用户无忧使用。
综上所述,[推进器型号]是一款技术先进、性能卓越的水下推进器,具备广泛的适用范围和优质的售后服务。
我坚信,这款推进器将为我国水下作业领域带来巨大的推动力,为我国海洋事业的发展贡献力量。
在此,我郑重推荐[推进器型号]给贵单位。
如有需要,请随时与我联系,我将竭诚为您服务。
敬请审阅!推荐人:[您的姓名]职务:[您的职务]单位:[您的单位]联系方式:[您的电话号码]日期:[推荐信日期]第2篇尊敬的[收信人姓名]:您好!在此,我谨代表[推荐单位名称]向您强烈推荐一款专业水下推进器——[产品名称]。
水下机器人的设计与制造技术研究
水下机器人的设计与制造技术研究水下机器人是一种能够在水下环境中自主运动和执行任务的机器人,是现代机器人技术的一种重要分支。
水下机器人的应用范围广泛,包括海洋勘探、深海科学研究、海洋资源开发、水下维修和救援等领域。
水下机器人的发展对人类了解海洋、保护海洋和利用海洋资源具有重要意义。
本文将从水下机器人的设计和制造两个方面进行分析和探讨。
一、水下机器人的设计水下机器人的设计需要考虑机器人的目标任务和使用环境,从而选择合适的动力系统、控制系统、传感器和执行器等组成机器人的硬件系统,并编写合适的软件系统,实现机器人对环境的感知和对任务的执行。
1. 动力系统水下机器人的动力系统是机器人实现运动和执行任务的重要组成部分。
通常采用的动力系统包括电池、内燃机、氢燃料电池等。
其中,电池是目前应用最为广泛的动力系统之一,其优点是体积小、重量轻、使用方便,但缺点是续航时间短。
氢燃料电池则是一种新型的动力系统,具有高效、环保、无噪音等优点,但目前其成本较高。
2. 控制系统水下机器人的控制系统是机器人实现自主运动和任务执行的关键。
控制系统包括机器人的计算机、电子控制板、传感器和执行器等。
机器人的计算机通常使用嵌入式系统,使得机器人具有高效的数据处理和控制能力。
电子控制板则负责机器人的运动和任务执行,通过与机器人的传感器和执行器的交互实现对机器人的控制。
传感器和执行器则是实现机器人对环境的感知和对任务的执行的重要设备。
3. 传感器水下机器人的传感器是实现机器人对环境感知和实现任务执行的必要设备。
传感器常用的类型包括摄像头、激光雷达、超声波传感器、压力传感器等。
其中,摄像头是最常用的传感器之一,可以为机器人提供视觉信息,使机器人能够感知周围的环境和目标。
激光雷达则可以实现对目标物体的精确探测和距离测量。
超声波传感器则可以实现机器人对水下环境的测量和距离测量,压力传感器可以实现对水下深度的测量。
4. 执行器水下机器人的执行器是实现任务执行的关键。
水下机器人推进系统动力学分析

水下机器人推进系统动力学分析一、水下机器人推进系统概述水下机器人,也被称为无人水下航行器(UUV),是一种能够在水下自主或遥控操作的设备,广泛应用于海洋探测、科学研究、事侦察以及水下作业等领域。
水下机器人的推进系统是其核心组成部分,直接影响到机器人的机动性、稳定性和效率。
本文将对水下机器人推进系统的动力学进行分析,探讨其设计原理、性能特点以及影响因素。
1.1 水下机器人推进系统的作用与分类水下机器人的推进系统主要负责提供动力,使机器人能够在水下进行前进、后退、上浮和下潜等运动。
根据推进方式的不同,水下机器人的推进系统可以分为螺旋桨推进、喷水推进、机械臂推进等类型。
1.2 水下机器人推进系统的设计要求设计水下机器人推进系统时,需要考虑多个因素,如推进效率、噪音水平、操控性、可靠性以及成本等。
这些因素共同决定了推进系统的性能和适用性。
1.3 水下机器人推进系统的性能指标评价水下机器人推进系统性能的指标包括推力、速度、响应时间、能耗和稳定性等。
这些指标对于机器人在不同水下环境中的作业能力至关重要。
二、水下机器人推进系统的动力学原理水下机器人推进系统的动力学分析是理解其工作原理和优化设计的基础。
动力学分析涉及到流体力学、结构力学和控制理论等多个领域。
2.1 流体动力学基础水下机器人在水下运动时,其推进系统与周围水体相互作用,产生推力和阻力。
流体动力学是研究这种相互作用的科学,涉及到速度场、压力场和边界条件等概念。
2.2 推进系统动力学模型建立水下机器人推进系统的动力学模型,可以描述其运动状态和响应特性。
模型通常包括质量、刚度、阻尼和外力等元素,通过数学方程表达。
2.3 推进系统控制策略为了实现水下机器人的精确控制,需要设计合适的控制策略。
控制策略涉及到推进速度、方向和力度的调节,以适应不同的任务需求和环境条件。
三、水下机器人推进系统的设计优化与应用水下机器人推进系统的设计优化是提高其性能和适应性的关键。
水下机器人推进器设计

水下机器人推进器设计引言水下机器人是现代科技的一大创新,它们在海洋科学研究、海洋资源开发和环境监测等领域发挥着重要作用。
而推进器作为水下机器人的核心部件之一,具有关键的推进功能。
本文将介绍一种水下机器人推进器的设计方案。
设计原理水下机器人推进器的设计原理可以分为两类:螺旋桨型和喷水推进器型。
本方案采用螺旋桨型推进器设计。
螺旋桨型推进器螺旋桨型推进器通过螺旋桨的旋转产生推进力,将水流向后推,从而推动水下机器人前进。
其优点包括推进力大、效率高,适用于各种深度和潜航速度。
推进器设计要求水下机器人推进器的设计要求如下:1. 推进器应具备良好的推进效率,以提高水下机器人的速度和航行时间;2. 推进器应具备可靠性和稳定性,能够在水下环境中长时间工作;3. 推进器应具备较小的尺寸和重量,以便适应水下机器人的整体设计要求;4. 推进器应采用可调节推力的设计,以适应不同工作场景下的需求。
设计方案本设计方案采用三叶螺旋桨型推进器设计,具体设计步骤如下:1. 根据水下机器人的要求确定推进器的尺寸和推力范围;2. 选择合适的材料,并进行结构设计;3. 通过数值模拟和实验验证,优化推进器的性能;4. 设计电机驱动系统,提供足够的转速和扭矩;5. 安装推进器并进行航行测试,验证设计方案的可行性。
结论本文介绍了一种水下机器人推进器的设计方案。
通过采用螺旋桨型推进器,可以实现水下机器人的高效推进和稳定航行。
该设计方案满足推进器的设计要求,对于水下机器人的性能提升具有重要意义。
参考文献1. Smith, J. (2018). Underwater Robotics: Design, Fabrication, and Testing. Springer.2. Johnson, R. (2020). Design Principles for Underwater Robots. Proceedings of the IEEE, 108(6), 835-849.。
水下矢量推进器研究综述

水下矢量推进器研究综述张 帅,肖晶晶(厦门大学 航空航天学院,福建 厦门 361102)摘要: 本文结合水下潜器和水上船舶的水下矢量推进器,对具有不同矢量推进方式的螺旋桨矢量推进器和喷水矢量推进器进行分类整理和展开描述,概述部分矢量推进器的发展历史,阐明国内外各类不同方式的水下矢量推进器的工作原理及特点,最后总结了水下矢量推进器的发展趋势,对未来水下矢量推进器的设计和应用具有一定的参考价值。
关键词:矢量;推进器;螺旋桨中图分类号:U664.1 文献标识码:A文章编号: 1672 – 7649(2019)04 – 0001 – 05 doi:10.3404/j.issn.1672 – 7649.2019.04.001Review of underwater vector propulsion devicesZHANG Shuai, XIAO Jing-jing(School of Aerospace Engineering, Xiamen University, Xiamen 361102, China)Abstract: The various forms of propeller vector thruster and waterjet vector thruster are sorted out and expanded espe-cially for underwater vehicles and ships in this paper. The development history of part of the vector propulsion devices are summarized, and the operation mechanism and the features of the various types of vector propulsion devices are also illus-trated in detail. Finally, the development trend of underwater vector propulsion devices is summarized. There is a certain ref-erence value for future design and application of the underwater propulsion devices in this paper.Key words: vector;thruster;propeller0 引 言海洋属于国家非常重要的战略资源,在生存资源日益枯竭的当下,海洋资源显得尤为重要。
水下矢量推进器系统的设计与分析
2 . 中南大学机电工 程学 院 , 湖南 长沙 4 1 0 0 8 3 )
摘 要: 运用三维软件 P R O E设计 了一种基 于杆件传动的液压驱动 矢量推进 装置 , 提 出了通过控制 液压缸驱动 来达 到控
行 器 .
图 1 矢量推进器三维图及结构简图 由图 1可知有 8个 构件 , 7个活 动构件 , 3个 移动 副 ( 自 由度为 1 ) , 7个球面副(自由度为 3 ) . 空 间 自由度 的计算为
F :6 n— c i: 6 ( 1 )
Байду номын сангаас
本文基于传统 的螺旋桨 推进技 术设计 了一 种液压 驱动 的新型推进系统 , 该装置利用 三个液压 缸系统作 为装 置 的驱 动 系统 , 通过控 制三个 活塞杆位 移控 制壳体 的偏 转方 向, 达
制壳体 的偏 转方向的方案. 通过建立数学模型和 MA T L A B计算 , 证 明 了偏 转角度与 液压缸位移 量一一 对应的 关 系. 通过 A D — A MS仿真进一步证明 了这种矢量推进装置应用于水下运载器的可行性 , 该装置能降低 运载器推进 系统的复杂性. 关键 词 : 矢量推进装置 ; 运动 学 ; 螺旋桨
平 台, 本文设计 的系统所 采用 的推进 方式是传统 的螺旋桨推 进技术 J . 支撑 螺旋 桨的机构 应该要 具备 两个方 面 的功能.
一
是要输 出轴能实现全方位 的姿态调 整 ; 二是要 把驱动器 的
运 动转换 为螺旋桨 的空 间运动 . 齿 轮传动 有着效 率高 , 机 构 紧凑 , 传动稳定等优 势 , 国 内很 多研究传 统螺旋 桨技 术 的大
基于科恩达效应的水下无桨叶推进器的实验与研究
基于科恩达效应的水下无桨叶推进器的实验与研究
科恩达效应(CoandăEffect)是指一种流体动力学现象,即流体在经过一个曲面的时候,会沿着曲面继续流动,而不是沿着原来的方向继续流动。
该效应可以应用在各种工程
设计中,包括飞机机翼和水下推进器等。
水下无桨叶推进器是一种利用科恩达效应产生推力的装置。
该推进器不像传统的螺旋
桨或水轮机那样有旋转的叶片,而是通过一个具有曲面形状的装置来引导流体,并利用科
恩达效应产生推力。
相比传统的螺旋桨推进器,水下无桨叶推进器具有结构简单、无震动、无噪音等优点。
为了研究水下无桨叶推进器的效果,进行了一系列实验。
在实验室中使用模型进行研究。
模型是一个具有曲面形状的装置,通过改变曲面的形状和角度来观察推进器的推力效果。
实验中使用水作为模拟液体,通过控制水流的流速和压力,以及改变模型的曲面形状
和角度,记录下推力的大小和方向。
实验结果显示,水下无桨叶推进器的推力效果与曲面
的形状和角度密切相关,合适的曲面形状和角度可以获得较大的推力。
在进行实验和研究的还进行了数值模拟分析。
通过建立水动力学模型,模拟了水下无
桨叶推进器在不同条件下的推力效果。
通过数值模拟的计算结果,可以更加详细地了解推
进器的工作原理和推力产生机制,优化推进器的设计参数。
基于科恩达效应的水下无桨叶推进器通过实验和研究,证明了其在水下推进领域具有
较大的应用潜力。
随着对科恩达效应的深入研究和推进器性能的优化,相信水下无桨叶推
进器将进一步发展,并在水下交通、海洋工程等领域发挥更大的作用。
几种水下推进器介绍及超小型水下推进器开发设计
水下机器人又称为水下无人潜器,分为遥控、半自治及自治型。
水下机器人是典型的军民两用技术,不仅可用于海上资源的勘探和开发,而且在海战中也有不可替代的作用。
为了争夺制海权,各国都在开发各种用途的水下机器人。
以下介绍几种最新的水下推进器:1?泵喷推进器上世纪80年代,英国在“特拉法尔加”(Trafalgar)级攻击型核潜艇上率先装备了一种新型的泵喷推进器(PumpJetThruster)。
这种推进方式可以有效降低潜艇的辐射噪声,因而倍受世界各海军强国的关注。
随后,英国在“前卫”(Vanguard)级以及“机敏”(Astute)级核潜艇上,法国在“凯旋”(LeTriomphant)级核潜艇上,美国在“海狼”(Seawolf)级、“弗吉尼亚”(Virginia)级核潜艇上,纷纷采用泵喷推进器取代已被广泛应用的七叶大侧斜螺旋桨。
据不完全统计,至今世界上以泵喷推进器作为推进方式的核动力潜艇已达几十艘之多。
图1 ?“北风之神”级核潜艇尾部泵喷射推进器特写采用泵喷推进的潜艇与采用大侧斜螺旋桨推进的潜艇相比,最大的优点是可以大幅度降低潜艇推进器的辐射噪声、提高潜艇的低噪声航速。
以美国“海狼”级攻击型核潜艇为例,该艇水下最高航速30节以上(有报道可达35节),水下30米时的低噪声航速大于20节,辐射噪声接近于海洋环境噪声,被美国官方称为当今世界上最安静、最快的潜艇。
图2? 泵喷推进器设计三维图随着声探测技术的飞速进步,在未来海战中,核潜艇的声隐身性能将是决定战斗胜负的关键,努力降低核潜艇的噪声必将成为潜艇研究的主要课题,而推进器是核潜艇的一个主要噪声源,低噪声推进器的研究和应用势在必行。
因此,具有低噪声优势的泵喷推进器,将成为未来几十年核潜艇推进器的一个重要发展方向。
2 WT系列蛙人助推器武汉维纳凯朴工程技术有限公司生产的商用水下推进器(DPV),也叫蛙人助推器,是潜水爱好者或者特种部队进行潜水航行的重要援助手段之一,广受国内外使用者的青睐。