创意之星配置一览表
哈工大暑期机器人课设答辩报告
机器人创新设计与制作课程设计题目车载机械臂四轮小车设计与制作专业机器人工程班号组号 1713402 第4组学生姓名仲帅郑倩陈宇航指导教师刘亚欣答辩日期 2019年7月23日哈尔滨工业大学(威海)课程设计成绩基本信息班号: 1713402 组号: 4 地点: Y315 课程设计时间: 2019 年 7 月 15 日至 7 月 28 日装订顺序页码1、封面2、课程设计成绩Ⅰ3、课程设计任务书Ⅱ4、目录Ⅲ5、正文 16、参考文献7、图纸和程序清单课程设计成绩竞赛排名:成绩:设计分工表学生成绩教师签字: 2019年07月 23日哈尔滨工业大学*********任务书指导教师签字:李哲2019年1月3日第1章绪论1.1课题背景与意义第三次信息技术革命以来,随着微电子、信息、计算机等技术的快速发展,人工智能技术的发展速度越来越快,智能化产品不断进入人们的生活。
中国自1978年把“智能模拟”作为国家科学技术发展规划的主要研究课题,开始着力研究智能。
从概念的引进到实验室研究的实现,再到现在军事、航天航空、勘探等高端领域的应用,为智能化理论的全面发展奠定基石。
人工智能的理论方案、分析方法及特色创新都可以为国内采矿勘探机器人、自动运输机器人、家用自动清洁机器人等自动半自动机器人的设计与普及提供一定的参考。
人类可以利用自己的听觉、视觉、味觉、触觉等功能获取事物的信息,人类的大脑再根据已经掌握的知识对这些信息进行综合分析,从而全面了解认知事物。
这样一个认识事物、分析事物和处理信息的过程称之为信息融合过程。
多传感器信息融合的基本原理就是模仿人类大脑的这个过程,得到一个对复杂对象的一致性解释或结论。
多传感器信息融合是协调多个分布在不同地点,相同或不同种类的传感器所提供的局部不完整观测量信息加以综合,协调使用,消除可能存在的冗余和矛盾,并加以互补,以减少不确定性,得到对物体或环境的一致性描述的过程。
智能小车包含周围环境探测、识别和自动控制等功能的综合系统,以单片机芯片作为其控制核心,由控制器控制其进行相应的动作。
创意之星搭建手册

1 零件清单- 1.1 创意之星-机器人套件(入门版)- 1.1 创意之星-机器人套件(入门版)由于“创意之星”模块化机器人套件具有多种版本,并有丰富的选购件可供选用,因此您可能会发现您手头的部分零件不足以组装出您所需要的机器人构型。
本手册第6~10页列出了适用于不同版本的构型。
请根据您选购的产品版本来选择适合的组装范例,由于产品升级、配置更改可能导致本手册内容不尽准确,敬请谅解!产品光盘中包含有本手册中所有范例的3D实体模型。
在您动手组装前,您可以使用Unigraphics、ProEngineer、SolidWorks 等软件,在计算机上搭建3D虚拟样机。
这将帮助您熟悉本产品,并对搭建出的样机的外观有直观的体验。
本手册不包含机器人控制方面的教程。
关于如何对机器人进行编程控制,将在配套的《实验指导书》中详细介绍。
关于本手册或者本产品的任何疑问,请登录/,“技术论坛”发帖子请求帮助,博创科技的技术人员将为您及时解答。
技术服务电话:86-10-82114870/4887/4890技术服务邮箱:robot_service@目录1 零件清单 (4)1.1 创意之星-机器人套件(入门版) (4)1.2 创意之星-机器人套件(标准版) (5)1.3 创意之星-机器人套件(高级版) (6)2 本教程适用范围 (7)2.1 适用于入门版的范例 (7)2.1 适用于标准版的范例 (9)1 零件清单- 1.1 创意之星-2.1 适用于高级版的范例.3 准备工作.3.1 工具3.2 安全4 基本构型 (14)4.1 基本连接 (14)4.2 舵机相关 (16)4.3 传感器 (21)4.5 控制器 (21)4.6 机械手 (24)5 初级搭建示例 (25)5.1 3DOF-简易机械臂 (25)5.2 4DOF-简易人型机器人 (29)5.3 4DOF-简易四轮小车 (32)5.4 5DOF-全向四驱车(全向轮) (35)6 高级搭建示例 (40)6.1 7DOF-六关节机械手 (40)6.2 10DOF-四足机器人2 (45)6.3 9DOF-全向四驱车(普通) (49)6.4 8DOF-履带式机器人 (51)6.5 18DOF-六足机器人 (56)6.6 13DOF-蛇形机器人 (60)6.7 16DOF-机器恐龙 (63)- 1.1 创意之星-机器人套件(入门版)1 零件清单- 1.2 创意之星-1.2 创意之星-机器人套件(标准版)机器人套件(高级版)- 1.3 创意之星-2 本教程适用范围 - 2.12 本教程适用范围2.1 适用于入门版的范例- 2.1 适用于入门版的范例2 本教程适用范围- 2.12.1 适用于标准版的范例- 2.1 适用于标准版的范例2 本教程适用范围 - 2.12.1 适用于高级版的范例- 2.1 适用于高级版的范例3 准备工作- 3.1 工具3 准备工作3.1 工具十字螺丝刀,尖嘴钳,工具刀3.2 安全用力过猛可能造成零件崩裂注意尖锐的地方放到婴儿拿不到的地方细小零件防止吞食.4 基本构型- 4.1 基本连接4 基本构型- 4.1 基本连接4 基本构型- 4.2 舵机相关4 基本构型 - 4.2 舵机相关4 基本构型- 4.2 舵机相关4 基本构型- 4.2 舵机相关4 基本构型- 4.2 舵机相关4 基本构型 - 4.3 传感器4.3 传感器4.5 控制器控制卡与底板连接的3种方式4 基本构型- 4.5 控制器4 基本构型- 4.5 控制器控制卡与L型件连接4 基本构型- 4.6 机械手5 初级搭建示例 - 5.1 3DOF-5 初级搭建示例5.1 3DOF-简易机械臂零件清单*以下附件均为实际尺寸。
专为创意人群设计年最适合创作的CPU排行

专为创意人群设计年最适合创作的CPU排行随着科技的发展,计算机已经成为创作领域中不可或缺的工具。
对于创意人群来说,一台强大的计算机是他们实现想法、创作作品的重要保障。
在计算机中,CPU(中央处理器)被认为是整个系统的“大脑”,它的性能对于创意创作的流畅度和效率起到至关重要的作用。
本文将为您介绍2021年专为创意人群设计的最适合创作的CPU排行榜,以供选择参考。
一、Intel Core i9-10900K作为Intel旗下的一款高性能CPU,Intel Core i9-10900K在创意领域中备受瞩目。
这款十核心处理器采用了14nm工艺制程,基础频率为3.7GHz,最大睿频频率可达5.3GHz。
它搭载了Intel的超线程技术,可同时处理20个线程,提供出色的多任务处理能力。
对于需要处理大型设计文件、编辑高分辨率图像和视频的创意人群来说,i9-10900K的强大性能将带来顺畅的创作体验。
二、AMD Ryzen 9 5950X作为AMD最新一代的旗舰CPU,AMD Ryzen 9 5950X也是创意人群的不二选择。
它采用了7nm Zen 3架构,拥有16个核心和32个线程。
基础频率为3.4GHz,最高睿频频率可达4.9GHz。
5950X还配备了AMD的Precision Boost技术,可根据工作负载自动提升处理器频率,以达到更高的性能。
对于进行3D建模、渲染、视频编辑等高强度创作任务的用户来说,AMD Ryzen 9 5950X的优异性能将大大提升工作效率。
三、Intel Core i7-10700K如果您的预算有限又需要一台强大的CPU来满足创作需求,那么Intel Core i7-10700K是不错的选择。
这款CPU采用了10nm工艺制程,拥有8个核心和16个线程。
基础频率为3.8GHz,最高睿频频率为5.1GHz。
虽然相比于i9系列,i7-10700K的核心数量较少,但它仍然具有不错的性能表现。
多媒体电脑DIY配置清单

多媒体电脑DIY配置清单多媒体电脑DIY配置清单1. 概述为了满足多媒体需求,DIY(Do It Yourself)组建一台多媒体电脑是一个不错的选择。
本文档提供了一份详细的配置清单,供参考用途。
请根据自身需求进行适当调整。
2. 处理器(CPU)- 品牌: Intel / AMD- 型号: 根据预算和需求选择合适的型号- 核心数量: 至少4核- 主频: 根据需求选择合适的主频- 建议: 高性能的处理器可以更好地处理多媒体任务,如视频编辑和游戏。
3. 主板(Motherboard)- 品牌: 根据个人喜好选择- 接口类型: ATX / Micro ATX / Mini ITX- 插槽数量: 根据需求选择合适的插槽数量,以支持所需的扩展卡、内存和存储设备。
- 建议: 选择具有足够的PCIe插槽、USB接口和扩展槽的主板,以满足多媒体设备的需求。
4. 内存(RAM)- 容量: 至少16GB- 类型: DDR4- 速度: 根据主板支持的最高速度选择合适的内存条- 建议: 多媒体应用程序通常需要占用大量内存,因此选择足够的内存容量是必要的。
5. 图形卡(Graphics Card)- 品牌: NVIDIA / AMD- 显存容量: 至少4GB- 接口: PCI Express 3.0 x16- 输出接口: HDMI / DisplayPort- 建议: 多媒体应用程序和游戏通常需要良好的图形性能,选择一块高性能的图形卡是重要的。
6. 存储设备(Storage)- 硬盘驱动器(HDD): 根据需求选择合适的容量,以存储大量的媒体文件。
- 固态硬盘(SSD): 至少256GB,用于操作系统和常用应用程序。
- 建议: 选择SSD作为系统盘可以提升系统的启动速度和应用程序的加载速度。
7. 电源(Power Supply)- 额定功率: 根据所选硬件的功耗和扩展计算合适的额定功率。
- 80 PLUS认证: 选择具有高能效的电源可以减少能量浪费。
创意之星机器人说明

v1.0 可编辑可修改创意之星机器人说明书目录1结构套件简介 ............................................................................ .. (3)结构件概述 ............................................................................ (3)C o n n F L E X连接结构 ............................................................................ (3)不同版本 ............................................................................ . (4)使用零件3D模型 ............................................................................ . (6)2控制器及电源 ............................................................................ .. (7)M u l t i F L E X™2-A V R控制器 ............................................................................ (8)M u l t i F L E X™2-P X A270控制器 ............................................................................ (9)电池和直流电源 ............................................................................ (12)3传感器............................................................................. .. (12)传感器的信号类型及电气规范 ............................................................................ (13)“创意之星”传感器接口 ............................................................................ (14)接近传感器 ............................................................................ .. (16)测距传感器 ............................................................................ . (19)声音传感器 ............................................................................ . (24)碰撞传感器 ............................................................................ . (26)倾覆传感器 ............................................................................ . (26)温度传感器 ............................................................................ . (27)光强传感器 ............................................................................ . (27)灰度传感器 ............................................................................ (28)视觉和语音传感器 ............................................................................ (28)4执行器............................................................................. (29)C D S5516机器人舵机 ............................................................................ .. (29)C D S5401大扭矩R/C舵机 ............................................................................ .. (32)B D M C1203电机驱动模块 ............................................................................ (33)F a u l h a b e r大功率减速电机............................................................................. .. (34)5N o r t h S T A R图形化开发环境 ............................................................................ (35)安装及使用介绍 ............................................................................ . (35)使用流程图开发 ............................................................................ (39)手写代码开发 ............................................................................ . (46)调试与在线监控 ............................................................................ (47)6其它部件............................................................................. (54)U P-D e b u g g e r下载调试器 ............................................................................ .. (54)W i F i无线网卡或以太网线缆............................................................................. (55)Z i g B e e无线模组 ............................................................................ .. (56)1结构套件简介结构件概述“创意之星”是一种模块化机器人组件,其特点是组成机器人的各种零件都是通用、可重组的,各个零件之间有统一的连接方式,零件之间可以自由组合,从而构建出各种各样的机器人构型。
创意之星机器人套件介绍(1)
创意之星机器人套件适用领域■作为大学工科学生的创新实训课程教具和实验器材。
■作为大学工科学生的课程设计或者毕业设计平台。
■作为机器人研究者用于验证理论算法、验证学术论文的快速原型。
■作为机器人研究者用于开发新机器人之前搭建理论样机,验证原理和可行性的快速原型。
■作为机器人发烧友用于创作机器人的模块化机器人套件。
■作为大学生参加校内、省级、全国机器人比赛的实训平台。
【创意之星的定义:教具、实验器材、快速原型、模块化套件、比赛平台】UP-InnoSTAR™创意之星™机器人套件是一套用于高等工程创新实践教育的模块化机器人套件。
是一套数百个基本“积木”单元的组合套件包。
用这些“积木”可以搭建出各种发挥想象力的机器人,并可为自己搭建出的机器人编程。
几十种、数百个精密高强度ABS材质的结构零件包括轮子、杆件、法兰、L形、U形零件等多个结构件,提供了强大的结构扩展创意空间,可以任意组装;提供了10多个不同原理、功能各异的传感器,以及十多个数字舵机(电机)用作执行器可作为机器人关节动力或者轮子、履带的动力;这些部件通过一块功能强大的MultiFLEX2控制卡连接起来,开发环境流程图与C语言混合编程支持Microsoft VPL,源代码和电路图开放,提供全部组件的三维实体模型(IGES格式),可用于PRO/E等软件搭建机器人3D虚拟样机,或用于3D CAD、CAM课程、以及模具设计课程教学实例。
配有《构型搭建指南》和《机器人编程实验指导书》、数据手册等文档,并提供所有构件的3D模型,以及20多种典型构型的装配体3D模型,便于学习,并可用于搭建虚拟样机;可以根据提供的技术资料搭建3D虚拟样机、开发自己的机器人控制卡、传感器等等,经由模仿,走向自主创新!● NorthSTAR集成开发环境支持流程图编程,无需编写代码即可开发机器人程序。
流程图和Ansi C混合编程,完整支持数组、位操作、指针、结构体等特性。
同时支持流程图中自定义函数和自定义代码,流程图编程也能拥有手工编程的灵活性!●流程图产生的程序为编译执行。
多媒体电脑DIY配置清单
多媒体电脑DIY配置清单多媒体电脑DIY配置清单一、引言本文档提供一个多媒体电脑DIY配置清单,以帮助用户在自己组装电脑时选择合适的硬件组件和配件。
二、硬件要求⒈处理器●推荐使用Intel Core i5或更高级别的处理器●需要支持多核心和超线程技术●频率应至少为3GHz⒉主板●需要支持选定的处理器型号●提供足够的PCIe插槽和扩展槽●支持最新的USB和SATA标准⒊内存●推荐8GB或更多的内存●需要支持选定的主板的内存类型和频率⒋显卡●推荐使用独立显卡,如NVIDIA GeForce GTX或AMD Radeon系列●需要至少4GB显存●支持选定的显示器的分辨率和刷新率⒌存储●需要至少256GB的SSD作为系统盘●需要至少1TB的HDD作为数据存储盘⒍电源●提供足够的功率供应所有硬件组件●需要具备良好的能效和稳定性⒎显示器●推荐使用27英寸或更大尺寸的显示器●支持1080p或更高的分辨率●提供多个视频输入端口⒏声卡●需要支持选定的主板和操作系统●提供清晰的音频输出和输入三、周边设备⒈键盘和鼠标●推荐使用机械键盘和高精度鼠标●需要支持选定的操作系统和连接方式⒉扬声器和耳机●推荐使用具有良好音质和低噪音的扬声器和耳机●需要支持选定的声卡和连接方式⒊摄像头和麦克风●推荐使用高分辨率的摄像头和清晰的录音麦克风●需要支持选定的操作系统和连接方式四、附件本文档附带以下附件:⒈图片:多媒体电脑DIY配置示意图⒉表格:多媒体电脑DIY配置清单法律名词及注释⒈处理器:计算机中负责执行指令和处理数据的核心部件。
⒉主板:计算机的重要组成部分,用于安装处理器、内存、硬盘等。
⒊内存:计算机用于暂时存储数据的部件,对系统性能具有重要影响。
⒋显卡:计算机中负责图像处理的硬件设备。
⒌ SSD:固态硬盘,使用闪存存储数据,速度较传统的机械硬盘更快。
⒍ HDD:机械硬盘,使用旋转磁盘存储数据。
⒎电源:为计算机提供电力的设备。
⒏机械键盘:使用机械开关作为触发机制的键盘,具有较好的手感和反馈。
多媒体电脑DIY配置清单

多媒体电脑DIY配置清单本文档涉及附件:附件1:产品图片附件2:价格表附件3:产品说明书本文所涉及的法律名词及注释:1.版权:指对作品享有的独占权利,包括复制、分发、展览、修改等。
2.商标:指用于标识商品或服务来源的标记,如品牌名称、标志图案等。
3.专利:指对发明技术的一种保护,确保发明人享有独占权利。
4.隐私权:指个人的私人信息不被他人获得及使用的权利。
正文:一、引言多媒体电脑的DIY配置清单为了满足用户对于高质量音视频娱乐的需求,以及能够处理图形和视频编辑任务的需要。
本文档将详细介绍DIY配置的硬件和软件要求。
二、硬件配置要求1.处理器:推荐选择最新一代的英特尔或AMD处理器,如Intel Core i7或AMD Ryzen 7等,确保足够的处理能力。
2.主板:选择支持最新处理器架构的主板,提供多个PCI-Express插槽,以支持显卡、声卡等扩展卡。
3.内存:至少16GB的DDR4内存,用于提供足够的内存容量。
4.显卡:为了满足高质量的视频和图形处理需求,建议选择高性能显卡,如NVIDIA GeForce RTX系列或AMD Radeon RX系列。
5.存储:选择大容量、高速的固态硬盘(SSD)作为系统盘,同时配备较大容量的机械硬盘(HDD)作为数据存储。
6.显示器:根据需求选择高分辨率(如2K或4K)的显示器,确保优质的图像显示效果。
7.声卡:选择支持多声道音频输出的声卡,以提供更好的音频效果。
8.电源:选择功率稳定、效率高的电源,确保系统的供电安全和稳定。
9.散热系统:为了保持系统散热,选择高效率的散热器、风扇等散热设备。
三、软件配置要求1.操作系统:选择适合的操作系统,如Windows 10或MacOS,以确保兼容性和稳定性。
2.多媒体软件:选择适合的多媒体软件,如Adobe Creative Suite、Final Cut Pro等,以满足视频和图像编辑等需求。
3.驱动程序:安装最新版本的硬件驱动程序,以确保硬件设备的正常工作和优化性能。
diy公司岗位及员工人数安排表
diy公司岗位及员工人数安排表(实用版)目录1.引言:介绍 DIY 公司的背景和岗位及员工人数安排表的重要性2.公司各部门岗位设置及其对应的员工人数3.各部门员工人数的合理性分析4.结论:总结 DIY 公司的岗位及员工人数安排表,并提出建议正文DIY 公司是一家专注于手工艺品制作与销售的企业,为了更好地实现公司发展目标,提高生产效率,公司制定了一套完善的岗位及员工人数安排表。
本文将对该安排表进行分析,以评估其合理性,并提出相应建议。
首先,让我们了解一下 DIY 公司的组织架构及各部门岗位设置。
根据安排表,公司共设有五个部门,分别为:生产部、销售部、设计部、采购部和人力资源部。
以下是各部门的主要岗位及其对应的员工人数:1.生产部:生产经理(1 人)、生产主管(2 人)、生产员(20 人)2.销售部:销售经理(1 人)、销售主管(2 人)、销售员(10 人)3.设计部:设计经理(1 人)、设计师(5 人)4.采购部:采购经理(1 人)、采购员(3 人)5.人力资源部:人力资源经理(1 人)、人事专员(2 人)接下来,我们将分析各部门员工人数的合理性。
从以上数据可以看出,生产部门是公司人数最多的部门,这也是合理的,因为生产部门是公司实现产品生产的核心部门,需要保证足够的人力来完成生产任务。
而设计部门和销售部门的员工人数相对较少,但考虑到 DIY 公司的产品特点,设计部门需要有足够的设计师来保证产品的创新和独特性,销售部门则需要有能力强的销售员来推动产品销售。
在评估了各部门员工人数的合理性之后,我们认为 DIY 公司的岗位及员工人数安排表整体上较为合理。
然而,仍存在一些可以改进的地方。
例如,在销售部门,可以考虑增加一些市场营销方面的岗位,以便更好地拓展市场。
此外,在人力资源部,可以适当增加培训专员等岗位,以便更好地为员工提供培训和发展机会。
总之,DIY 公司的岗位及员工人数安排表整体上较为合理,但在某些方面仍有改进的空间。
创意之星机器人套件实验
创意之星机器⼈套件实验实验⼀熟悉创意之星机器⼈套件实验⼀、实验题⽬熟悉创意之星机器⼈套件实验⼆、实验⽬的1、熟悉创意之星软硬件结构及其编程环境。
2、了解各种机器⼈传感器。
3、熟悉季了解机器⼈执⾏器—舵机。
了解其⼯作原理。
三、实验器材标准版控制器⼀个、外接直流电源⼀个、灰度传感器⼀个、红外接近传感器⼀个、数字舵机⼀个、舵机线两个、多功能调试器⼀个四、实验要求1、认识标准版控制器各部分功能。
2、掌握NorthStar编程环境的基本操作。
3、学会使⽤标准版控制器的IO接⼝。
4、学会使⽤标准版控制器的AD接⼝。
5、学会使⽤标准版控制器的舵机接⼝。
6、学会编写、下载并运⾏简单的程序。
五、实验内容1、熟悉NorthStar软件中各功能模块。
NorthSTAR 是⼀个图形化交互式机器⼈控制程序开发⼯具。
在NorthSTAR 中,通过⿏标的拖动类似逻辑框的控件和对控件做简单的属性设置,就可以快捷的编写机器⼈控制程序。
程序编辑完后,可以编译并下载到机器⼈控制器中运⾏。
从NorthStar的“⽂件”菜单或者⼯具栏选择“新建”,将会弹出⼯程设置对话框,如下图,控制卡选项⾥点选“MultiFlex2-PXA270”,构型选项点选“⾃定义”;点击“下⼀步”按钮进⼊舵机设置。
1、设置舵机ID,控制舵机。
下图为CDS5500 机器⼈舵机:设置舵机个数为2,将ID 为2 的舵机设置为电机模式。
点击“下⼀步”按钮进⼊AD设置:置IO个数为2:点击“完成”完成⼯程设置。
2、通过NorthStar环境查询传感器数据。
结构零件构成了“创意之星”机器⼈的躯体,控制器是“创意之星”机器⼈的⼤脑,⽽传感器就是“创意之星”机器⼈的感知器官:⽪肤、眼睛、⽿朵、⿐⼦和⾆头等等。
传感器能够将机器⼈⾃⾝的电流、电压、位置信息,外部的距离、温度、湿度、光线、声⾳、图像等信息转化为电信号。
传感器内部的电路对这些电信号经过预处理之后转化为能够为控制器所采集或读取的电压、脉冲、数据信号。
新校区配置表-编程猫新校区配置表-多媒体教室

品名
编程猫校区基本设施设备配备目录(校配
参考规格
单位
墙壁文化 1
文化墙
一体机:65英寸、120G固态硬盘、Win7系统
2
一体机或电视
、48kg、170W,赠移动支架 电视:65英寸、能联网、有USB接口、具备
台
HDMI接口
3
白板
推荐:鸿合i382(88寸)1710*1217*45教室中 白板悬挂时必须必须距地0.3m
1
根据实际情况购买 每个教室3-5个
当地
1
当地
5
个
4
音响设备
套
5
电脑
操作系统:win10,内存:4G 或以上
硬盘:20G 或以上(剩余空间) CPU:i5或同等级别的amd系列 或以上
套
摄像头:需要,麦克锋:需要
硬件设施 6
课桌课椅
木质桌椅,双人桌桌面尺寸120cm*60cm
套
7
空调
1匹作用范围10-15㎡、1.5匹作用范围16-26㎡ 、2匹作用范围20-37㎡、3匹作用范围30-58㎡
台
8
监控
根据实际情况购买
个
9
饮水机
10
盆栽
冷热型、立式
台
以小盆栽为主,绿萝、吊篮
株
设备配备目录(校配)
配备标准
对接方
全校实际配备情况
数量
备注
当地
一台
当地
1
每个教室一个
当地
1
根据实际情况购买
当地
1ቤተ መጻሕፍቲ ባይዱ
根据实际情况购买
网上
双人桌每两张为一组共3组 当地或网上
6
多媒体电脑DIY配置清单
多媒体电脑DIY配置清单关键信息:1、 CPU 型号及参数:____________________________2、主板型号及参数:____________________________3、内存容量及类型:____________________________4、硬盘类型及容量:____________________________5、显卡型号及参数:____________________________6、显示器尺寸及分辨率:____________________________7、机箱类型及材质:____________________________8、电源功率及品牌:____________________________9、散热器类型:____________________________10、键盘鼠标类型:____________________________11 CPU 选择111 为满足多媒体处理的需求,推荐选择英特尔酷睿 i7 或 AMD 锐龙 7 系列的处理器。
这些处理器具有多核心和高主频的特点,能够轻松应对视频编辑、图形设计等多媒体任务。
112 例如,英特尔酷睿 i7-13700K 拥有 16 核心 24 线程,基础频率34GHz,最大睿频 54GHz,具备强大的计算能力。
113 AMD 锐龙 7 7700X 也是一个不错的选择,8 核心 16 线程,基础频率 45GHz,最大加速频率 54GHz,在多线程任务处理方面表现出色。
12 主板121 主板的选择应与所选的 CPU 兼容,并且具备良好的扩展性和稳定性。
122 对于英特尔平台,可以考虑华硕 PRIME Z790-P 主板,支持DDR5 内存,拥有多个 M2 接口和丰富的 USB 接口。
123 对于 AMD 平台,技嘉 AORUS B650 AERO G 主板是个不错的选择,具备强大的供电系统和优秀的散热设计。
创意之星模块化机器人套件培训资料

┃ ║
┃ ╠═RobotServoTerminal_help 帮助文档
┃ ║
┃ ╚═RobotServoTerminal中英文版本说明
║ 20131211 V1.0 ║
║ ║
╰═════════════════════════════╯
┃ ╠═WinAVR 软件安装文件
┃ ║
┃ ╠═安装说明
┃ ║
┃ ╚═《舵机知识汇总》介绍舵机的相关知识。
┃
┣━━创意之星教学(文件夹)
┃ ║
┃ ║
┃ ╠═标准版 LED灯 培训样例程序
┃ ║
┃ ╚═高级版MP3 培训样例程序
┃
════════════════╮
║ ║
║ "创意之星"模块化机器人套件培训资料 ║
┃ ╠═参考样例 包括避障小车、机器狗、六足、四足爬虫、自平衡和寻线小车样例可以参考
┃ ║
┃ ╚═入门视频 包括NorthStar软件及配件的使用
┃
《创意之星培训》(文件夹)
┃
┣━━创意之星.PPT 培训PPT文档
┃ ║
┃ ╠═NorthStar常见问题解决方案
┃ ║
┃ ╚═readme 说明文档
┃
┣━━2、舵机调试软件(文件夹)
┃ ║
《创意之星安装》(文件夹)
┃
┣━━1、NorthStar图形化集成开发环境(文件夹)
┃ ║
┃ ╠═NorthStar2.2.10.511_Setup 图形化机器人编程环境安装程序
中学生创客大赛套件清单
5/7
49
颜色传感器模块
TCS230 工作电压:2.7-5.5v 颜 色 识 别 , 频 率 输 出 10kHz-12kHz 检测距离 10mm
颜色值与频率输 出相关,用于条 码扫描,静态物 体颜色识别
50
称重传感器模块
HX711 24 位高精度 AD 转换,内部 集成 128 倍可编程放大器, 壳配置桥式供压适合称重 50 公斤半桥结构 误差 0.1%F.S, 灵敏度 1mv/V 工作电压;10V DS18B20 工作电压:5v 分辨率调整范围:9-12v 温度测量范围:-55--+125℃ 单总线 DHT11 工作电压 3.3-5v 湿度测量范围:20-90%RH 温度测量范围:0-50℃ 精度±5%RH, ±2℃ 响应时间:<5s DS1302 时分秒,年月日,星期及调 整,工作电压;2-5.5,300nA 三线通信
检测环境声音强 度
4/7
39
水位水滴传感器模 块
工作电压 3-5v 模拟量输出
水量大小,水位 检测报警
45 , 46,原 理同
40
干簧管磁控开关模 块 门磁开关报警器
电压 5v 磁铁接近 10mm 闭合,输出 低电平 MC-38 动作距离:18mm 开关输出:常闭 负载电流:500mA
用于磁性靠近检 测 用于门窗和保险 柜开启检测,报 警
产生单音频提示
64
2.4G 无线收发器模 块
NRF24L01+ 1.9-3.6V, SPI 接口, 内置 2.4G 天线,125 频点,速率 2Mbps
用于 2.4G 无线 传输
65
2 路继电器模块
工作电压 5V,电流大于 100mA 负 载 : 250v/10A 交 流 或 30v/10A 直流 低电平吸合高电平释放 带 2 路光耦隔离 双面 34 格便携元件
东方创意之星设计大赛评分标准

东方创意之星设计大赛评分标准
1. 创意性,评委会通常会评估参赛作品的创意水平,包括设计
理念、创新性和独特性等方面。
创意性高的作品往往能够吸引人们
的注意,并展现出设计师的独特思维和想象力。
2. 执行力,参赛作品的执行力也是评分的重要因素之一。
这包
括设计的技术水平、制作工艺、材料运用等方面。
一个好的设计不
仅要有创意,还需要能够被实际制作出来,并且具有实用性和美观性。
3. 实用性,设计作品的实用性也是评分的考量因素之一。
参赛
作品需要能够满足特定的使用需求,符合人体工程学,能够为用户
带来便利和舒适。
4. 可持续性,在当今社会,可持续发展理念日益受到重视。
因此,评委会通常也会考虑参赛作品的可持续性,包括材料的环保性、设计的生命周期等方面。
5. 用户体验,参赛作品的用户体验也是评分的重要考量因素。
设计师需要考虑到用户的使用习惯、心理需求等方面,使得作品能
够为用户带来良好的体验。
以上是一般设计大赛评分标准的一些方面,不同的比赛可能会有些许差异,但总体来说,创意性、执行力、实用性、可持续性和用户体验是设计大赛评分的重要考量因素。
创意之星配置一览表
交流适配器:提供机器人外接电源,电流5A。
1
7.4v锂电池组:机器人锂电池组,可内置在控制器里,控制器内置充电器。
1
USB下载调试器:可下载AVR程序,通讯,舵机调试三合一调试器
1
3
执行部分
CDS5516总线式机器人舵机,扭矩16Kgf.cm
14
橡胶轮胎:ABS轮毂橡胶轮胎
4
LED指示灯
4
4
传感部分
1
交流适配器:提供机器人外接电源,电流5A
1
7.4v锂电池组:机器人锂电池组,可内置在控制器里,控制器内置充电器。
1
USB下载调试器:可下载AVR程序,通讯,舵机调试三合一调试器
1
3
执行部分
CDS5516总线式机器人舵机,扭矩16Kgf.cm
20
橡胶轮胎:ABS轮毂橡胶轮胎
4
液晶屏模块:RS-422接口的单色液晶屏
十字螺丝刀1个电缆套管2创意之星高级版明细表序号名称参数数量结构件部分高级版结构件组50多种800多个控制部分32位控制卡multiflex2pxa270主频520mhz包含网线一条本身不带电池
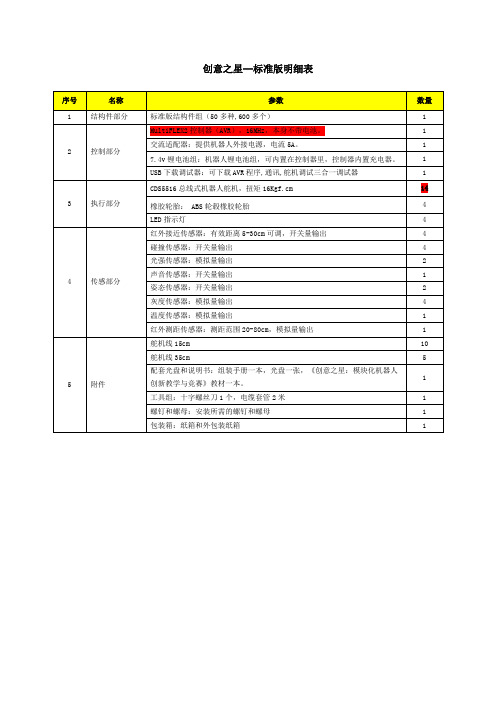
创意之星--标准版明细表
序号
名称
参数
数量
1
结构件部分
标准版结构件组(50多种,600多个)
1
2
控制部分
MultiFLEX2控制器(AVR),16MHz,本身不带电池。
红外接近传感器:有效距离5-30cm可调,开关量输出
4
碰撞传感器:开关量输出
4
光强传感器:模拟量输出
2
声音传感器:开关量输出
1
姿态传感器:开关量输出
2
灰度传感器:模拟量输出
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
序号
名称
参数
数量
1
结构件部分
标准版结构件组(50多种,600多个)
1
2
控制部分
MultiFLEX2控制器(AVR),16MHz,本身不带电池。
1
交流适配器:提供机器人外接电源,电流5A。
1
7.4v锂电池组:机器人锂电池组Βιβλιοθήκη 可内置在控制器里,控制器内置充电器。
1
USB下载调试器:可下载AVR程序,通讯,舵机调试三合一调试器
序号
名称
参数
数量
1
结构件部分
高级版结构件组(50多种,800多个)
1
2
控制部分
32位控制卡(MultiFLEX2-PXA270),主频520MHz,包含网线一条,本身不带电池。
1
交流适配器:提供机器人外接电源,电流5A
1
7.4v锂电池组:机器人锂电池组,可内置在控制器里,控制器内置充电器。
1
USB下载调试器:可下载AVR程序,通讯,舵机调试三合一调试器
1
3
执行部分
CDS5516总线式机器人舵机,扭矩16Kgf.cm
14
橡胶轮胎:ABS轮毂橡胶轮胎
4
LED指示灯
4
4
传感部分
红外接近传感器:有效距离5-30cm可调,开关量输出
4
碰撞传感器:开关量输出
4
光强传感器:模拟量输出
2
声音传感器:开关量输出
1
姿态传感器:开关量输出
2
灰度传感器:模拟量输出
4
温度传感器:模拟量输出
1
红外测距传感器:测距范围20-80cm,模拟量输出
1
5
附件
舵机线15cm
10
舵机线35cm
5
配套光盘和说明书:组装手册一本,光盘一张,《创意之星:模块化机器人创新教学与竞赛》教材一本。
1
工具组:十字螺丝刀1个,电缆套管2米
1
螺钉和螺母:安装所需的螺钉和螺母
1
包装箱:纸箱和外包装纸箱
1
创意之星--高级版明细表
1
工具组:十字螺丝刀1个,电缆套管2米
1
螺钉和螺母:安装所需的螺钉和螺母
1
包装箱:纸箱和外包装纸箱
1
摄像头和麦克风、喇叭:USB摄像头、麦克风和喇叭各1个(270控制器必配)
1
1
3
执行部分
CDS5516总线式机器人舵机,扭矩16Kgf.cm
20
橡胶轮胎:ABS轮毂橡胶轮胎
4
液晶屏模块:RS-422接口的单色液晶屏
1
LED指示灯
4
4
传感部分
红外接近传感器:有效距离5-30cm可调,开关量输出
4
碰撞传感器:开关量输出
4
光强传感器:模拟量输出
2
声音传感器:开关量输出
2
姿态传感器:开关量输出
2
灰度传感器:模拟量输出
4
温度传感器:模拟量输出
1
红外测距传感器:测距范围20-80cm,模拟量输出
2
霍尔接近传感器:开关量输出
1
UP-Sonar5KN:RS-422接口输出的超声测距传感器
1
5
附件
舵机线15cm
15
舵机线35cm
5
配套光盘和说明书:组装手册一本,光盘一张,《创意之星:模块化机器人创新教学与竞赛》教材一本。