超声波测距仪说明书
超声波测试仪使用说明概要
超声波测试仪使用说明:
1.正确放置电池后,把右边推置拨下来(20M)的位置,产品上面立即显示70.0和电池的电量。
2.当需要测量驱鼠器的超声波的时候,把测试器正对着驱鼠器,LCD上就会显示测量的数据。
3.LCD的显示范围从70.0 - 150.0 ,这个数据只是给测量者提供一个参考的声压数据。
和实际的数据可能会有出入,但不影响演示使用。
4.测量完成后,请把推置拨回到OFF位置。
5.在开机后,5分钟后,产品将自动关机。
如果在20M位置自动关机,请把推置先拨回到OFF位置,再拨回到20M位置,产品将重新开机。
6.此产品是从测距仪上改制过来的,所以产品正面有一些按键。
但是产品正面所有按键功能均无效。
7.如果LCD显示电池电量不足,请更换新电池。
如果长时间不使用,请把电池拿出来,以免电池漏液损坏仪器。
超声波测距器的设计说明书模板
超声波测距器的设计摘要用单片机控制超声波的发射,通过单片机记录和读取发射超声波和接收到的回波的时间差,进而计算出测量的距离。
文中详细论述了超声波测距的原理、测量电路和程序设计的方案。
关键词:超声波测距仪单片机目录摘要................................................Ⅰ1前言.................................................1 1.1 设计任务.............................................1 1.2本设计的应用意义.....................................1 2总体设计方案.............................................2 2.1设计原理...................................................3 2.2总体设计框图...............................................4 3电路原理的设计...............................................5 3.1超声波传感器....................................5 3.2超声波发射电路设计........................................7 3.3超声波回波接收处理电路设计.................................8 3.4LED显示电路设计...................................9 3.5键盘电路设计.............................................10 4软件设计.............................................12 4.1超声波测距原理........................................124.1.1超声波脉冲法测距原理...................................204.1.2超声波信号测量..................................21 4.2程序框架.......................................174.3测距控制程序...............................18 4.416Hz时基中断处理程序.............................194.6EXT1外部中断程序......................................22 4.7显示刷新程序.........................................23 4.8主程序.........................................23 5系统调试...........................................245.1硬件电路调试.........................................245.2软件程序调试.........................................255.2.1调试的主要方法.................................265.2.2调试中遇到的问题.................................275.3综合调试.............................................28 6 设计总结.......................................................29 致...........................................................30 参考文献.......................................................31 附录A:超声波测距器电路原理图....................................32 附录B:程序清单...................................................321 前言1.1 设计任务本设计实现超声波测距,要求测距围为100cm~500cm,用LED 数码管显示测量结果,以厘米为单位,精度为1 厘米;测量用按键触发:(1)开机时数码管显示000;(2)按下键盘则进行一次测量,并把测量结果显示在LED 数码管上。
超声波测距仪使用方法说明书

超声波测距仪使用方法说明书1. 概述超声波测距仪是一种常用的测量仪器,通过发射超声波脉冲并接收其回波来测量距离。
本说明书将详细介绍超声波测距仪的使用方法,以便用户能够正确、高效地操作该仪器。
2. 准备工作在开始测量之前,确保以下准备工作已经完成:2.1 确认超声波测距仪的电源已经连接,并处于正常工作状态。
2.2 确认被测物体与测距仪之间没有遮挡物,以保证测量的准确性。
2.3 选择合适的工作模式和单位,根据实际需要进行相应的设置。
3. 测量步骤3.1 启动仪器按下电源开关,待超声波测距仪正常启动后,屏幕上将显示相关的操作提示。
3.2 定位测量目标将测距仪对准待测物体,使其成为屏幕上的测量目标。
可以通过调整测距仪的方向和角度来精确定位。
3.3 发射超声波脉冲按下“发射”按钮,超声波测距仪将发射一组超声波脉冲,并记录下发送时刻。
3.4 接收回波当超声波脉冲遇到物体并被反射回来时,测距仪将接收到回波,并记录下接收时刻。
3.5 计算距离根据发送和接收时刻之差,超声波测距仪可以计算出测量目标与仪器之间的距离。
4. 测量注意事项4.1 避免测量目标表面有较强的光照或强烈的声音,以免影响超声波的传播和接收。
4.2 在测量长距离时,要保持仪器与测量目标之间的直线视线,以减小测量误差。
4.3 对于不规则形状的物体,建议进行多次测量并取平均值,以提高测量结果的准确性。
4.4 定期检查超声波测距仪的探头是否清洁,避免灰尘或其他杂质的影响。
5. 故障排除在使用超声波测距仪过程中,可能会遇到一些常见的故障情况,以下是一些常见问题的排除方法:5.1 无法启动或显示异常:检查电源连接是否正常,试试更换电池或充电。
5.2 测距不准确:确认测量目标与测距仪之间没有遮挡物,并确保仪器正确定位。
5.3 回波信号弱:检查探头是否干净,并调整适当的增益和灵敏度。
5.4 其他问题:如有其他问题,请参考产品说明书或联系售后服务。
6. 常见应用场景超声波测距仪在多个领域具有广泛的应用,包括建筑工程、机械制造、物流仓储等。
EM310-UDL 超声波测距传感器用户手册说明书

超声波测距传感器EM310-UDL用户手册安全须知为保护产品并确保安全操作,请遵守本使用手册。
如果产品使用不当或者不按手册要求使用,本公司概不负责。
严禁拆卸和改装本产品。
请勿将产品放置在不符合工作温度、湿度等条件的环境中使用,远离冷源、热源和明火。
请勿使产品受到外部撞击或震动。
本产品不可作为计量工具使用。
为了您的设备安全,请及时修改设备默认密码(123456)。
产品符合性声明EM310-UDL系列符合CE,FCC和RoHS的基本要求和其他相关规定。
版权所有©2011-2022星纵物联保留所有权利。
如需帮助,请联系星纵物联技术支持:邮箱:*********************电话:************传真:************总部地址:厦门市集美区软件园三期C09栋深圳:深圳市南山区高新南一道TCL大厦A709文档修订记录日期版本描述2021.9.6V1.0第一版2021.12.30V1.1更新品牌Logo目录一、产品简介 (4)1.1产品介绍 (4)1.2产品亮点 (4)二、产品结构介绍 (4)2.1包装清单 (4)2.2外观概览 (5)2.3产品尺寸 (5)2.4电源按钮与指示灯 (5)三、产品配置 (6)3.1NFC配置 (6)3.2LoRaWAN®基本配置 (6)3.3常用设置 (9)3.4高级设置 (9)3.4.1校准设置 (9)3.4.2阈值设置 (10)3.5维护 (10)3.5.1升级 (10)3.5.2备份 (11)3.5.3重置 (12)四、产品安装 (12)五、数据通信协议 (13)5.1设备信息 (13)5.2传感器数据 (14)5.3下行指令 (14)一、产品简介1.1产品介绍EM310-UDL 是一款功能强大的超声波测距传感器,采用双探头设计,利用超声波测距原理,以非接触方式精准测量传感器与目标间的距离。
同时产品还内置MEMS 三轴加速度计,可用于监控设备姿态。
超声波测距仪说明书

湄洲湾职业技术学院超声波测距仪说明书系别: 自动化工程系年级:10级专业: 电气自动化技术姓名: 郑学号:**********导师姓名: 李志杰职称: 讲师2013年05月29日目录1 前言 (1)2 系统设计参数要求 (2)3 系统设计 (3)3.1系统设计总体框图 (3)3.2超声波测距原理 (4)3.3系统构成 (5)3.4硬件电路设计 (5)3.5传感器介绍 (6)3.5.1超声波传感器原理 (6)4 系统模块 (7)4.1超声波发射模块 (7)4.2超声波接收模块 (8)4.3LCD显示模块 (9)4.4系统印刷电路板的制作图 (9)5 系统软件设计 (10)5.1超声波测距的算法 (10)5.2程序流程图 (10)5.3超声波温度补偿子程序流程图 (11)5.4超声波测距子程序流程图 (12)5.5系统操作说明 (13)5.6系统操作注意事项 (13)参考文献 (14)致谢语 (15)系统附录 (16)附录一原理总图 (16)附录二印刷电路图 (17)附录三元件清单 (18)附录四程序流程 (19)1 前言本设计是以单片机技术为基础,实现对前方物体距离的测量。
根据超声波指向性强,能量消耗慢,在介质中传播距离远的特点,利用超生波传感器对前方物体进行感应,经过单片机中的程序对超声波传感器发射和接收的超声波信号进行分析和计算处理,最后将处理结果在LCD1602上显示。
STC89C52单片机的超声波测距系统,此系统根据超声波在空气中传播反射原理,把超声波传感器作为接口部件,利用超声波在空气中传播的时间差来测量距离,设计了一套超声波检测系统。
该系统设计主要由主控制器模块、超声波发射模块、超声波接收模块和显示模块等四个基本模块构成,用接收部分接收超声波。
本设计利用两个中断,在发射信号时,打开定时器中断0和外部中断0使定时器计时,接收到发射超声波信号时,外部中断0关闭中断,这时定时器中断0计录的时间就为超声波传播经过测距仪到前方物体的来回时间。
MaxBotix XL-MaxSonar-EZ AE 高性能超声波距离测量器产品说明书

High Performance Sonar Range Finder ArrayMB1200, MB1210, MB1220, MB1230, MB1240, MB1260, MB12618time auto calibration forEZ/AE sensors have a low powerClose Range OperationApplications requiring 100% reading-to-reading reliability should not use MaxSonar sensors at a distance closer than20cm. Although most users find MaxSonar sensors to work reliably from 0 to 20cm (25cm select models) for detecting objects in many applications, MaxBotix® Inc. does not guarantee operational reliability for objects closer than the minimum reported distance. Because of ultrasonic physics, these sensors are unable to achieve 100% reliability at close distances.______________________________________________________________________________________________________________________________________ Warning: Personal Safety ApplicationsWe do not recommend or endorse this product be used as a component in any personal safety applications. This product is not designed, intended or authorized for such use. These sensors and controls do not include the self-checking redundant circuitry needed for such use. Such unauthorized use may create a failure of the MaxBotix® Inc. product which may result in personal injury or death. MaxBotix®Inc. will not be held liable for unauthorized use of this component.Our ultrasonic sensors are in air, non-contact object detection and ranging sensors that detect objects within an area. These sensors are not affected by the color or other visual characteristics of the detected object. Ultrasonic sensors use high frequency sound to detect and localize objects in a variety of environments. Ultrasonic sensors measure the time of flight for sound that has been transmitted to and reflected back from nearby objects. Based upon the time of flight, the sensor then outputs a range reading._______________________________________________________________________________________________________________________________________ Pin OutPin 1-BW-Leave open (or high) for serial output on the Pin 5 output. When Pin 1 is held low the Pin 5 output sends a pulse (instead of serial data), suitable for low noise chaining.Pin 2-PW– For the MB1200 (EZ) sensor series, this pin outputs a pulse width representation of range. To calculate distance, use the scale factor of 58uS per cm.For the MB1300 (AE) sensor series, this pin outputs the analog voltage envelope of the acoustic wave form. The output allows the user to process the raw waveform of the sensor.Pin 3-AN– For the 7.6 meter sensors (all sensors except for MB1260, MB1261, MB1360, and MB1361), this pin outputs analog voltage with a scaling factor of (Vcc/1024) per cm. A supply of 5V yields ~4.9mV/cm., and 3.3V yields ~3.2mV/ cm. Hardware limits the maximum reported range on this output to ~700cm at 5V and ~600cm at 3.3V. The output is buffered and corresponds to the most recent range data.For the 10 meter sensors (MB1260, MB1261, MB1360, MB1361), this pin outputs analog voltage with a scaling factor of (Vcc/1024) per 2 cm. A supply of 5V yields ~4.9mV/2cm., and 3.3V yields ~3.2mV/2cm. The output is buffered and corresponds to the most recent range data.Pin 4-RX– This pin is internally pulled high. The XL-MaxSonar-EZ sensors will continually measure range and output if the pin is left unconnected or held high. If held low the will stop ranging. Bring high 20uS or more for range reading. Pin 5-TX-When Pin 1 is open or held high, the Pin 5 output delivers asynchronous serial with an RS232 format, except voltages are 0-Vcc. The output is an ASCII capital “R”, followed by three ASCII character digits representing the range in centimeters up to a maximum of 765, followed by a carriage return (ASCII 13). The baud rate is 9600, 8 bits, no parity, with one stop bit. Although the voltage of 0-Vcc is outside the RS232 standard, most RS232 devices have sufficient margin to read 0-Vcc serial data. If standard voltage level RS232 is desired, invert, and connect an RS232 converter such as a MAX232.When Pin 1 is held low, the Pin 5 output sends a single pulse, suitable for low noise chaining (no serial data).Pin 6-+5V-Vcc – Operates on 3.3V - 5V. The average (and peak) current draw for 3.3V operation is 2.1mA (50mA peak) and at 5V operation is 3.4mA (100mA peak) respectively. Peak current is used during sonar pulse transmit. Please reference page 4 for minimum operating voltage verses temperature information.Pin 7-GND- Return for the DC power supply. GND (& V+) must be ripple and noise free for best operation._______________________________________________________________________________________________________________________________________ Product Release NotesFor all MB1260/MB1360 sensors sold after Feb 20, 2013, the minimum reported distance is 25cm.For all MB1261/MB1361 sensors sold after Feb 20, 2013, the minimum reported distance is 25cm.For all MB1200/MB1300 sensors sold after Oct 01, 2013, the minimum reported distance is 25cm.For all MB1210/MB1310 sensors sold after Oct 01, 2013, the minimum reported distance is 25cm.The sensor minimum reported distance is 20cm 1 (7.87 inches). However, the XL -MaxSonar -EZ will range and report targets to the front sensor face. Large targets closer than 20cm 1 will typically range as 20cm 1.Sensor Operation from 6-inches to 20-inchesBecause of acoustic phase effects in the near field, objects between 20cm and 50cm may experience acoustic phasecancellation of the returning waveform resulting in inaccuracies. These effects become less prevalent as the target distance increases, and has not been observed past 50cm. For this reason, industrial users that require the highest sensor accuracy are encouraged to mount the XL -MaxSonar -EZ from objects that are farther than 50cm.Range “0” LocationThe XL -MaxSonar -EZ reports the range to distant targets starting from the front of the sensor as shown in the diagram below.In general, the XL -MaxSonar -EZ will report the range to the leading edge of the closest detectable object. Target detection has been characterized in the sensor beam patterns.____________________________________________________________________________________________________________________________________Mechanical Dimensions____________________________________________________________________________________________________________________________________Real -Time Auto CalibrationEach time before the XL -MaxSonar sensor takes a range reading it calibrates itself. The sensor then uses this data to range to objects. If the temperature, humidity, or applied voltage changes during operation, the sensor will continue to function normally. The sensor does not apply compensation for the speed of sound change versus temperature to any range readings.Temperature CompensationThe speed of sound in air increases about 0.6 meters per second, per degree centigrade. The XL -MaxSonar -EZ sensors are not equipped with an internal temperature compensation. If temperature compensation is desired, contact MaxBotix and request the temperature compensation formula PDF. This will allow users to compensation for speed of sound changes.Range ZeroThe graph below shows minimum operating voltage of the sensor verses temperature.While the XL-MaxSonar® is designed to operate in the presence of noise, best operation is obtained when noise strength is low and desired signal strength is high. Hence, the user is encouraged to mount the sensor in such a way that minimizes outside acoustic noise pickup. In addition, keep the DC power to the sensor free of noise. This will let the sensor deal with noise issues outside of the users direct control (in general, the sensor will still function well even if these things are ignored). Users are encouraged to test the sensor in their application to verify usability.For every ranging cycle, individual filtering for that specific cycle is applied. In general, noise from regularly occurring periodic noise sources such as motors, fans, vibration, etc., will not falsely be detected as an object. This holds true even if the periodic noise increases or decreases (such as might occur in engine throttling or an increase/decrease of wind movement over the sensor). Even so, it is possible for sharp non-periodic noise sources to cause false target detection. In addition, *(because of dynamic range and signal to noise physics,) as the noise level increases, at first only small targets might be missed, but if noise increases to very high levels, it is likely that even large targets will be missed.*In high noise environments, if needed, use 5V power to keep acoustic signal power high. In addition, a high acoustic noise environment may use some of the dynamic range of the sensor, so consider a part with less gain such as the MB1220/MB1320 MB1230/MB1330 or MB1240/MB1340. For applications with large targets, consider a part with ultra clutter rejection like the MB7369._____________________________________________________________________________________________________________________________________ Typical Performance to Target_____________________________________________________________________________________________________________________________________ Typical Performance in clutterPower Up TimingSensor Free-Run TimingReal-Time OperationTiming Description175mS after power-up, the XL-MaxSonar is ready to begin ranging. If Pin-4 is left open or held high (20uS or greater), the sensor will take a range reading. The XL-MaxSonar checks the Pin-4 at the end of every cycle. Range data can be acquired once every 99mS. Each 99mS period starts by Pin-4 being high or open, after which the XL-MaxSonar calibrates and calculates for 20.5mS, and after which, twenty 42KHz waves are sent.At this point, for the MB1260, the pulse width (PW) Pin-2 is set high and until an object is detected after which the pin is set low. If no target is detected the PW pin will be held high for up to 44.4mS1 (i.e. 58uS * 765cm) or 62.0mS2 (i.e. 58uS * 1068cm). (For the most accurate range data, use the PW output.)For the MB1300 sensor series, The analog envelope output, Pin-2, will show the real-time signal return information of the analog waveform.For both parts, the remainder of the 99mS time (less 4.7mS) is spent adjusting the analog voltage to the correct level, (and allowing the high acoustic power to dissipate). During the last 4.7mS, the serial data is sent.When using multiple ultrasonic sensors in a single system, there can be interference (cross-talk) from the other sensors. MaxBotix Inc., has engineered a solution to this problem for the XL-MaxSonar-EZ sensors. The solution is referred to as chaining. We have 3 methods of chaining that work well to avoid the issue of cross-talk.The first method is AN Output Commanded Loop. The first sensor will range, then trigger the next sensor to range and so on for all the sensor in the array. Once the last sensor has ranged, the array stops until the first sensor is triggered to range again. Below is a diagram on how to set this up.The next method is AN Output Constantly Looping. The first sensor will range, then trigger the next sensor to range and so on for all the sensor in the array. Once the last sensor has ranged, it will trigger the first sensor in the array to range again and will continue this loop indefinitely. Below is a diagram on how to set this up.The final method is AN Output Simultaneous Operation. This method does not work in all applications and is sensitive to how the other sensors in the array are positioned in comparison to each other. Testing is recommend to verify this method will work for your application. All the sensors RX pins are conned together and triggered at the same time causing all the sensor to take a range reading at the same time. Once the range reading is complete, the sensors stop ranging until triggered next time. Below is a diagram on how to set this up.The XL -MaxSonar -EZ sensors have the capability to operating independently when the user desires. When using the XL -MaxSonar -EZ sensors in single or independent sensor operation, it is easiest to allow the sensor to free -run. Free -run is the default mode of operation for all of the MaxBotix Inc., sensors. The XL -MaxSonar -EZ sensors have three separate outputs that update the range data simultaneously: Analog Voltage, Pulse Width, and RS232 Serial. Below are diagrams on how to connect the sensor for each of the three outputs when operating in a single or independent sensor operating environment._____________________________________________________________________________________________________________________________________Selecting a XL -MaxSonar -EZ/AEDifferent applications require different sensors. The XL -MaxSonar -EZ/AE product line offers varied sensitivity to allow you to select the best sensor to meet your needs.The diagram above shows how each product balances sensitivity and noise tolerance. This does not effect the maximum range, pin outputs, or other operations of the sensor. To view how each sensor will function to different sized targets reference the XL -MaxSonar -EZ BeamPatterns._______________________________________________________________________________________________________________________________________Beam CharacteristicsBackground Information Regarding our Beam PatternsEach XL -MaxSonar -approximate detection pattern shown in this datasheet. This allows end users to select the partnumber that matches their given sensing application. Each part number has a consistent field ofdetection so additional units of the same part number will have similar beam patterns. The beamplots are provided to help identify an estimated detection zone for an application based on theacoustic properties of a target versus the plotted beam patterns.Each beam pattern is a 2D representation of the detection area of the sensor. The beam pattern isactually shaped like a 3D cone (having the same detection pattern both vertically and horizontally). Detection patterns for dowels are used to show the beam pattern of each sensor. Dowels are longfor a given size target which allows easy comparison of one MaxSonar sensor to another MaxSonar sensor.For each part number, the four patterns (A, B, C, and D) represent the detection zone for a given target size. Each beam pattern shown is determined by the sensor’s part number and target size.The actual beam angle changes over the full range. Use the beam pattern for a specific target at any given distance to calculate the beam angle for that target at the specific distance. Generally, smaller targets are detected over a narrower beam angle and a shorter distance. Larger targets are detected over a wider beam angle and a longer range.MB1200/MB1300Applications and Uses∙ Great for people detection ∙ Security ∙ Motion detection ∙ Used with battery power ∙ Autonomous navigation ∙ Educational and hobby robotics ∙ Collision avoidanceThe wide beam makes this sensor ideal for a variety of applications including people detection, autonomous navigation, and wide beam applications.______________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________MB1200/MB1300Features and Benefits∙ Widest and most sensitive beampattern in XL -MaxSonar -EZ/AE line∙ Low power consumption ∙ Easy to use interface∙ Will pick up the most noise clutterof any of the sensors in XL -MaxSonar -EZ/AE line∙ Detects smaller objects∙ Best sensor to detect soft object inXL -MaxSonar -EZ line∙ Requires use of less sensors to dosame job∙ Can detect people up toapproximately 18 feet∙ 3.3v to 5.5v operational voltageNote: All sensors sold after Oct 01, 2013 have a minimum reported distance of 25cm. All sensors soldbefore this date have a 20cm minimum reported distance.MB1210/MB1310Applications and Uses∙ Great for people detection ∙ Security ∙ Motion detection ∙ Used with battery power ∙ Autonomous navigation ∙ Educational and hobby robotics ∙ Collision avoidance makes the MB1210/MB1310 an ideal sensor for applications in which the MB1200/MB1300 are too sensitive. _____________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________MB1210/MB1310Features and Benefits ∙ Great for applications in which the MB1200/MB1300 are too sensitive ∙ Low power consumption ∙ Easy to use interface ∙ Detects small objects ∙ Can detect people up to approximately 11 feet∙ 3.3v to 5.5v operational voltage Note: All sensors sold after Oct 01, 2013 have a minimum reported distance of 25cm. All sensors soldbefore this date have a 20cm minimum reported distance.MB1220/MB1320Applications and Uses∙ Great for people detection ∙ Security ∙ Motion detection ∙ Landing flying objects ∙ Used with battery power ∙ Autonomous navigation ∙ Educational and hobby robotics ∙ Collision avoidanceThis sensor balances sensitivity and detection to targets of different sizes. This sensor is a good comprise between sensitivity and side object rejection.______________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________MB1220/MB1320Features and Benefits∙ Recommended for users unsure ofwhich sensor to use in their application∙ Low power consumption ∙ Easy to use interface∙ Good balance of sensitivity and sideobject rejection∙ Can detect people up toapproximately 10 feet∙ 3.3v to 5.5v operational voltageMB1230/MB1330Applications and Uses∙ Great for people detection ∙ Security ∙ Motion detection ∙ Landing flying objects ∙ Used with battery power ∙ Autonomous navigation ∙ Educational and hobby robotics ∙ Collision avoidanceMB1230/MB1330 sensor a good choice in applications where the MB1240/MB1340 do not have enough sensitivity______________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________MB1230/MB1330Features and Benefits∙ Slightly more sensitive then theMB1240/MB1340∙ Low power consumption ∙ Easy to use interface ∙ Large Object detection∙ Requires use of less sensors to dosame job∙ Can detect people up toapproximately 8 feet∙ 3.3v to 5.5v operational voltageMB1240/MB1340Applications and Uses∙ Great for people detection ∙ Security ∙ Motion detection∙ Recommended for multi -copters andUAV’s∙ Used with battery power ∙ Autonomous navigation ∙ Educational and hobby robotics ∙ Collision avoidanceThis makes the senor great for applications in which there is a large amount of acoustic. The MB1240/MB1340 sensor is also recommended in applications where only large target detection is required.______________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________MB1240/MB1340Features and Benefits∙ Narrowest beam in theXL -MaxSonar -EZ/AE sensor line∙ Low power consumption ∙ Easy to use interface ∙ Large target detection ∙ Acoustic noise rejection ∙ 3.3v to 5.5v operational voltageMB1260/MB1360Applications and Uses∙ Great for people detection ∙ Security ∙ Motion detection ∙ Used with battery power ∙ Autonomous navigation ∙ Educational and hobby robotics ∙ Collision avoidance ∙ Long range detectionrange of 1068cm to large targets. This sensor is recommended for long range measurement to large targets. ______________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________MB1260/MB1360Features and Benefits∙ Shares same beam pattern withMB1200/MB1300∙ Maximum range of 1068cm to largetargets∙ Low power consumption ∙ Easy to use interface∙ Can detect people to approximately18feet∙ 3.3v to 5v operational voltageNote: Firmware rev 1.6b and newer have a 25cm minimum reported distance. This applies to all sensorssold after February 20, 2013. All sensors sold before this date have a 20cm minimum reported distance.MB1261/MB1361Applications and Uses∙ Great for people detection ∙ Security ∙ Motion detection ∙ Used with battery power ∙ Autonomous navigation ∙ Educational and hobby robotics ∙ Collision avoidance ∙ Long range detectiona longer maximum range of 1068cm to large targets. This sensor is recommended for applications in which the MB1210/MB1310 do not have a long enough detection distance.______________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________MB1261/MB1361Features and Benefits∙ Same beam pattern as the MB1210/MB1310∙ Long range of 1068cm to largetargets∙ Low power consumption ∙ Easy to use interface ∙ Detects smaller objects∙ Requires use of less sensors to dosame job∙ Can detect people up toapproximately 11 feet∙ 3.3v to 5v operational voltageAll part numbers are a combination of a six -character base followed by a dash and a three -digit product code. Please review the following table for more information on the three -digit product code.The following table displays all of the active and valid part numbers for this product.-We offer Technical Support on all of our products even if you purchased them through one of our many vendors worldwide.You can fill out a Technical Support form for assistance on a sensor here --> Technical SupportNot sure which sensor you need for your application?We offer Sensor Selection Assistance, click the link here to fill out a form for support --> Sensor Selection Help Looking for tutorials to help you get started?Frequently Asked Questions about Our SensorsWe receive many questions about our products and services. This resource offers answers to common inquiries we receive about our product lines and their application.Fully Calibrated Beam PatternsAll of our sensors are factory calibrated to provide consistent beam patterns, detection zones, to fit into a wide variety of applications. In our product lines, each model number comes with a different beam pattern that reflects the sensitivity and the detection zone of how it sees a target. Additionally, we strive to maintain consistency be-tween our finished products, and you will see little to no deviation between sensors of the same model. This al-lows you to have confidence in your final application when using multiple sensors.Understanding Range ReadingsThe success of an application may hinge upon knowing the exact location of a target. However, a sensor may report one meter even if the target is not exactly one meter away from the sensor. Sensor specifications, such as resolution, precision, and accuracy, help you to understand sensor performance.How to Use Multiple Ultrasonic SensorsThis guide covers three ways to run your sensors in a Multiple Sensor environment and issues you may face. Contact us now with any questions at ****************** or call +1-218-454-0766.Please call during our preferred business hours of 8:00 am – 4:30 pm EST on Monday through Thursday and 8:00 am – 2:00 pm EST on Friday, or you may leave us a voicemail anytime.。
超声波测距仪操作指南说明书

超声波测距仪操作指南说明书一、产品概述超声波测距仪是一种使用超声波技术进行测距的仪器。
该仪器可以广泛应用于建筑、工程、仓储、物流等领域,用于测量物体与测距仪之间的距离。
二、产品特点1. 高精度测量:超声波测距仪采用先进的超声波技术,能够精确测量物体与测距仪之间的距离,并具备高精确度。
2. 快速响应:该测距仪具有快速响应的能力,可以及时给出测量结果。
3. 多功能设计:超声波测距仪尤其适用于需要进行反复测量的环境,它不仅可以测量距离,还可以提供体积、面积等其他相关数据。
4. 易于操作:该测距仪采用简单的操作界面,用户可以轻松进行操作,并能够快速上手。
三、产品使用步骤1. 打开超声波测距仪:按下开关按钮,开启测距仪。
2. 进行初步设置:进入设置菜单,根据实际需求选择测量单位(如厘米、米)以及其他设置选项。
3. 对准测量目标:将测距仪对准待测量的目标物体,确保无遮挡物干扰,距离尽量垂直测量。
4. 进行测量:按下“测量”按钮,测距仪将向目标物体发出超声波信号,并通过测量回波时间计算出距离。
5. 查看测量结果:测距仪会在显示屏上显示测得的距离数值,并可在菜单中设置是否显示其他相关数据,如体积、面积。
6. 关闭超声波测距仪:在使用完毕后,按下开关按钮,关闭测距仪。
四、使用注意事项1. 避免使用在极端环境下:超声波测距仪对于极端高温、低温、潮湿等环境不适用,应避免在此类环境中使用。
2. 避免测量透明物体:超声波无法准确测量透明物体的距离,应避免对透明物体进行测量。
3. 避免测量不规则形状物体:对于形状不规则的物体,测量结果可能存在误差,应注意。
4. 避免测量过程中晃动:在测量过程中,避免手部晃动或移动,以确保测量结果的准确性。
5. 定期校准:为了确保测量结果的准确性,定期进行校准是必要的。
五、常见问题解答1. 为什么测量结果不准确?可能是测距仪与目标物之间存在遮挡物,或者测量时手部晃动等原因导致测量结果不准确。
JSN-SR04T-2.0 一体化超声波测距模块说明书

JSN-SR04T-2.0一体化超声波测距说明书1、产品特点:JSN-SR0T4-2.0超声波测距模块可提供20cm-600cm的非接触式距离感测功能,测距精度可达高到2mm;模块包括收发一体的超声波传感器与控制电路组成。
模式一的用法与本司的HC-SR04模块谦容。
本产品采用工业级一体化超声波探头设计,防水型,性能稳定,谦容市场上所有的MCU工作。
1、体积小,使用便捷2、供电范围宽,低功耗3、测量精度高,分辨率高4、探测盲区小,距离更远5、输出方式多样化,脉宽输出,串口输出。
2、实物图:3、规格参数:脉宽输出串口输出工作电压DC: 3.0-5.5V工作电流小于8mA探头频率40kHz最远射程600cm最近射程20cm远距精度±1cm分辨率1mm测量角度75度输入触发信号1、10uS以上的TTL脉冲2、串口发送指令0X55输出回响信号输出脉宽电平信号,或TTL接线方式3-5.5V(电源正极) Trig (控制端)RX Echo(输出端)TX GND(电源负极产品尺寸L42*W29*H12 mm工作温度-20℃—+70℃产品颜色PCB板为蓝色4、功能说明:本模块共有三种工作模式可以选择,客户可根据自己实际需要进行切换或实验。
如下图模式一:R27=open 即是不用焊接。
该模式说明如下1、基本工作原理:(1)采用IO口TRIG触发测距,给最少10us的高电平信呈。
(2)模块自动发送8个40khz的方波,自动检测是否有信号返回;(3)有信号返回,通过IO口ECHO输出一个高电平,高电平持续的时间就是超声波从发射到返回的时间。
测试距离=(高电平时间*声速(340M/S))/2;(4)模块被触发测距后,如果接收不到回波(原因超过所测范围或是探头没有正对被测物),ECHO口会在60MS后自动变为低电平,标志着此次测量结束,不论成功与否。
(5)LED指示灯说明,LED非电源指示灯,它在模块接收到触发信号后才会亮,此时模块处于工作状态。
希玛超声波测距仪说明书
希玛超声波测距仪说明书一、介绍希玛超声波测距仪是一种利用超声波技术进行测量的仪器。
它可以精确测量物体与测距仪之间的距离,并将结果显示在仪器的屏幕上。
希玛超声波测距仪具有测量范围广、精度高、反应迅速等特点,广泛应用于工业、建筑、交通等领域。
二、工作原理希玛超声波测距仪采用超声波脉冲回波测距原理。
当测距仪发出超声波脉冲时,脉冲经过空气传播到目标物体表面,然后被目标物体反射回来。
测距仪接收到反射回来的脉冲后,通过计算时间差来确定物体与测距仪之间的距离。
三、使用方法1. 打开测距仪电源开关,确保仪器正常启动。
2. 将测距仪对准目标物体,使其与目标物体保持一定距离。
3. 按下测量按钮,测距仪发出超声波脉冲,并开始计时。
4. 等待测距仪接收到反射回来的脉冲,停止计时。
5. 仪器屏幕上显示的数值即为目标物体与测距仪之间的距离。
四、注意事项1. 使用测距仪时,需要保持测距仪与目标物体之间的直线传播路径。
避免有障碍物阻挡。
2. 测距仪的测量范围和精度会受到环境条件的影响。
在复杂环境中使用时,需要根据实际情况进行调整和修正。
3. 长时间不使用测距仪时,建议关闭电源开关,以节省电量并延长仪器寿命。
4. 使用测距仪时,应避免将其暴露在潮湿、高温或强磁场等恶劣环境中,以免损坏仪器。
五、常见问题解答1. 问:测距仪显示的距离有误差,怎么办?答:可能是因为使用环境不理想或操作不当导致的。
可以尝试重新调整测距仪位置,或者进行校准操作。
2. 问:测距仪是否可以测量非常小的距离?答:希玛超声波测距仪的测量范围通常为几厘米到几十米,对于非常小的距离可能不太适用。
3. 问:测距仪可以在暗处使用吗?答:测距仪的工作原理是利用超声波进行测量,与光线无关,因此可以在暗处正常使用。
六、总结希玛超声波测距仪是一种精确、方便的测量工具,广泛应用于各个领域。
使用希玛超声波测距仪时,需要注意使用环境和操作方法,以确保测量结果的准确性。
希玛超声波测距仪的优点在于测量范围广,精度高,反应迅速,可以满足不同场景下的测量需求。
超声波测距仪说明书

自动测量及控制综合课程设计说明书题目超声波测距仪学院机械工程学院班级学生姓名学号指导老师2015年1月18日目录1绪论 (3)1.1课题设计及意义 (3)1.2设计内容 (3)2超声波测距设计原理及方案选择 (3)2.1超声波测距原理 (3)2.2设计方案 (4)3硬件选择与设计 (5)3.1单片机的选择 (6)3.2超声波模块的选择 (6)3.2.1 HC-SR04超声波模块时序图 (7)3.2.2 HC-SR04模块的使用 (8)3.3数码管的选择 (8)3.4硬件电路的设计 (9)4软件部分设计 (9)5数据处理及误差分析 (11)6设计体会与总结 (11)附录 (13)附录Ⅰ:超声波测距仪系统实物图................ 错误!未定义书签。
附录Ⅱ:程序代码 (13)附录Ⅲ:参考文献 (15)1绪论1.1课题设计及意义随着科学技术的快速发展,超声波将在测距仪中的应用越来越广。
但就目前水平说,人们可以具体利用的测距技术还十分有限,因此,这是一个正在蓬勃发展而又有无限前景的技术及产业领域。
展望未来,超声波测距仪作为种新型的非常重要的工具在各方面都将有很大的发展空间,它将朝着更加高定位高精度的方向发展,以满足日益发展的社会需求,如声纳的发展趋势基本为:研制具有更高定位精度的被动测距声纳,以满足水中武器实施全隐蔽攻击的需要;继续发展采用低频线谱检测的潜艇拖曳线列阵声纳,实现超远程的被动探测和识别;研制更适合于浅海工作的潜艇声纳,特别是解决浅海水中目标识别问题;降低潜艇噪声,改善潜艇声纳的工作环境。
无庸置疑,未来的超声波测距仪将与自动化智能化接轨,与其他的测距仪集成和融合,形成多测距仪。
随着测距仪的技术进步测距仪将从具有单纯判断功能发展到具有学习功能,最终发展到具有创造力。
在新的世纪里,面貌一新的测距仪将发挥更大的作用。
1.2设计内容超声波测距仪的设计,由单片机控制超声发射装置发射超声波,当超声波遇到障碍物时,发生反射,再由接受装置接受超声波,由单片机计算从发射到接受的时间并计算出障碍到超声波发射器的距离。
超声波测距模块使用说明
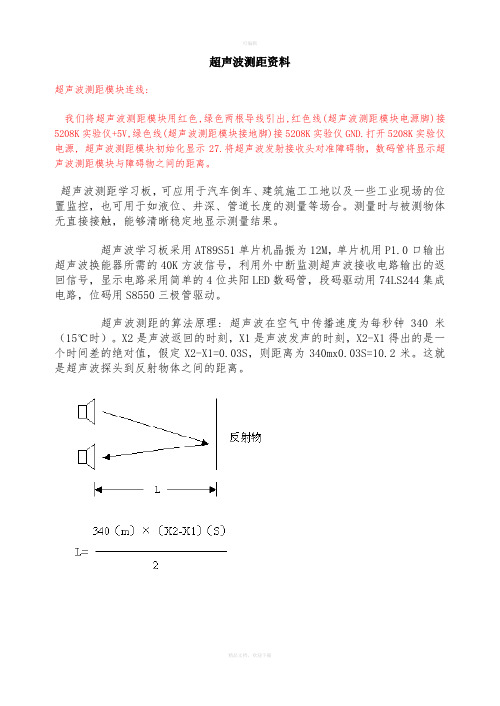
超声波测距资料超声波测距模块连线:我们将超声波测距模块用红色,绿色两根导线引出,红色线(超声波测距模块电源脚)接5208K实验仪+5V,绿色线(超声波测距模块接地脚)接5208K实验仪GND.打开5208K实验仪电源, 超声波测距模块初始化显示27.将超声波发射接收头对准障碍物,数码管将显示超声波测距模块与障碍物之间的距离。
超声波测距学习板,可应用于汽车倒车、建筑施工工地以及一些工业现场的位置监控,也可用于如液位、井深、管道长度的测量等场合。
测量时与被测物体无直接接触,能够清晰稳定地显示测量结果。
超声波学习板采用AT89S51单片机晶振为12M,单片机用P1.0口输出超声波换能器所需的40K方波信号,利用外中断监测超声波接收电路输出的返回信号,显示电路采用简单的4位共阳LED数码管,段码驱动用74LS244集成电路,位码用S8550三极管驱动。
超声波测距的算法原理: 超声波在空气中传播速度为每秒钟340米(15℃时)。
X2是声波返回的时刻,X1是声波发声的时刻,X2-X1得出的是一个时间差的绝对值,假定X2-X1=0.03S,则距离为340mx0.03S=10.2米。
这就是超声波探头到反射物体之间的距离。
产品性能特点:成品板上自带:超声波收发传感器、接收放大电路、四位LED数码显示、四位按键(四个按钮和蜂鸣器属于功能预留,程序中无定义),电源部分自带整流、滤波、稳压电路,允许交流7~15V或者直流9~16V输入,经过实际测试,测量范围可达27~250厘米,测量精度为1厘米。
下图是超声波测距学习板的元件布局图,以下是部分汇编源程序;/////////////////////////////////////////////////////// ; USE BY :超声波测距器; IC :AT89C51; TEL :; OSCCAL :XT (12M); display :共阳LED显示;/////////////////////////////////////////////////////// ;测距范围7CM-11M,堆栈在4FH以上,20H用于标志;显示缓冲单元在40H-43H,使用内存44H、45H、46H用于计算距离;VOUT EQU P1.0 ; 红外脉冲输出端口speak equ p1.1;********************************************;* 中断入口程序 *;********************************************;ORG 0000HLJMP STARTORG 0003HLJMP PINT0ORG 000BHretiORG 0013HRETIORG 001BHLJMP INTT1ORG 0023HRETIORG 002BHRETI;;********************************************;* 主程序 *;********************************************;START: MOV SP,#4FHMOV R0,#40H ;40H-43H为显示数据存放单元(40H为最高位)MOV R7,#0BHCLEARDISP: MOV @R0,#00HDJNZ R7,CLEARDISPMOV 20H,#00HMOV TMOD,#11H ;T1为 T0为16位定时器MOV TH0,#00H ;65毫秒初值MOV TL0,#00HMOV TH1,#00HMOV TL1,#00HMOV P0,#0FFHMOV P1,#0FFHMOV P2,#0FFHMOV P3,#0FFHMOV R4,#04H ;超声波肪冲个数控制(为赋值的一半)SETB PX0SETB ET1SETB EASETB TR1 ;开启测距定时器start1: LCALL DISPLAYJNB 00H,START1 ;收到反射信号时标志位为1CLR EALCALL WORK ;计算距离子程序clr EAMOV R2,#32h;#64H ;测量间隔控制(约4*100=400MS)LOOP: LCALL DISPLAYDJNZ R2,LOOPCLR 00Hsetb et0mov th0,00hmov tl0,00hSETB TR1 ;重新开启测距定时器SETB EASJMP Start1;;**************************************************** ;* 中断程序* *;****************************************************;T1中断,发超声波用 ;T1中断,65毫秒中断一次INTT1: CLR EAclr ex0MOV TH0,#00HMOV TL0,#00HMOV TH1,#00HMOV TL1,#00HSETB ET0SETB EASETB TR0 ;启动计数器T0,用以计intt11:CPL VOUT ;40KHZnopnopnopnopnopnopnopnopnopDJNZ R4,intt11;超声波发送完毕,MOV R4,#04Hlcall delay_250 ;延时,避开发射的直达声波信号SETB EX0 ;开启接收回波中断RETIOUT: RETI;外中断0,收到回波时进入PINT0: nopjb p3.2,pint0_exitCLR TR0 ;关计数器CLR EA ;CLR EX0 ;MOV 44H,TL0 ;将计数值移入处理单元MOV 45H,TH0 ;mov th0,#00hmov tl0,#00hjnb p3.2,$SETB 00H ;接收成功标志pint0_exit:RETI;;****************************************************;* 显示程序 *;****************************************************; 40H为最高位,43H为最低位,先扫描高位DISPLAY: MOV R1,#40H;GMOV R5,#7fH;GPLAY: MOV A,R5MOV P0,#0FFHMOV P2,AMOV A,@R1MOV DPTR,#TABMOVC A,@A+DPTRMOV P0,ALCALL DL1MSINC R1MOV A,R5JNB ACC.4,ENDOUT;GRR AMOV R5,AAJMP PLAYENDOUT: MOV P2,#0FFHMOV P0,#0FFHRET;TAB: DB 18h, 7Bh, 2Ch, 29h, 4Bh, 89h, 88h, 3Bh, 08h, 09h,0ffh ;共阳段码表 "0" "1" "2" "3" "4" "5""6" "7" "8" "9" "不亮""A""-" ;;**************************************************** ;* 延时程序 *;**************************************************** ;DL1MS:push 06hpush 07hMOV R6,#14HDL1: MOV R7,#19HDL2: DJNZ R7,DL2DJNZ R6,DL1pop 07hpop 06hRET;;**************************************************** ;* 距离计算程序 (=计数值*17/1000cm) *;**************************************************** ;work: PUSH ACCPUSH PSWPUSH BMOV PSW, #18hMOV R3, 45HMOV R2, 44HMOV R1, #00DMOV R0, #17DLCALL MUL2BY2MOV R3, #03HMOV R2, #0E8HLCALL DIV4BY2LCALL DIV4BY2MOV 40H, R4MOV A,40HJNZ JJ0MOV 40H,#0AH ;最高位为零,不点亮JJ0: MOV A, R0MOV R4, AMOV A, R1MOV R5, AMOV R3, #00DMOV R2, #100DLCALL DIV4BY2MOV 41H, R4MOV A,41HJNZ JJ1MOV A,40H ;次高位为0,先看最高位是否为不亮SUBB A,#0AHJNZ JJ1MOV 41H,#0AH ;最高位不亮,次高位也不亮JJ1: MOV A, R0MOV R4, AMOV A, R1MOV R5, AMOV R3, #00DMOV R2, #10DLCALL DIV4BY2MOV 42H, R4MOV A,42HJNZ JJ2MOV A,41H ;次次高位为0,先看次高位是否为不亮SUBB A,#0AHJNZ JJ2MOV 42H,#0AH ;次高位不亮,次次高位也不亮JJ2: MOV 43H, R0POP BPOP PSWPOP ACCRET;;**************************************************** ;* 两字节无符号数乘法程序 *;**************************************************** ; R7R6R5R4 <= R3R2 * R1R0超声波专用发射接收头,有T字样的是发射头,标有R字样的是接收头.。
超声波测距模块使用说明

超声波测距资料超声波测距模块连线:我们将超声波测距模块用红色,绿色两根导线引出,红色线(超声波测距模块电源脚)接5208K实验仪+5V,绿色线(超声波测距模块接地脚)接5208K实验仪GND.打开5208K实验仪电源, 超声波测距模块初始化显示27.将超声波发射接收头对准障碍物,数码管将显示超声波测距模块与障碍物之间的距离。
超声波测距学习板,可应用于汽车倒车、建筑施工工地以及一些工业现场的位置监控,也可用于如液位、井深、管道长度的测量等场合。
测量时与被测物体无直接接触,能够清晰稳定地显示测量结果。
超声波学习板采用AT89S51单片机晶振为12M,单片机用P1.0口输出超声波换能器所需的40K方波信号,利用外中断监测超声波接收电路输出的返回信号,显示电路采用简单的4位共阳LED数码管,段码驱动用74LS244集成电路,位码用S8550三极管驱动。
超声波测距的算法原理: 超声波在空气中传播速度为每秒钟340米(15℃时)。
X2是声波返回的时刻,X1是声波发声的时刻,X2-X1得出的是一个时间差的绝对值,假定X2-X1=0.03S,则距离为340mx0.03S=10.2米。
这就是超声波探头到反射物体之间的距离。
产品性能特点:成品板上自带:超声波收发传感器、接收放大电路、四位LED数码显示、四位按键(四个按钮和蜂鸣器属于功能预留,程序中无定义),电源部分自带整流、滤波、稳压电路,允许交流7~15V或者直流9~16V输入,经过实际测试,测量范围可达27~250厘米,测量精度为1厘米。
下图是超声波测距学习板的元件布局图,以下是部分汇编源程序;/////////////////////////////////////////////////////// ; USE BY :超声波测距器; IC :AT89C51; TEL :; OSCCAL :XT (12M); display :共阳LED显示;/////////////////////////////////////////////////////// ;测距范围7CM-11M,堆栈在4FH以上,20H用于标志;显示缓冲单元在40H-43H,使用内存44H、45H、46H用于计算距离;VOUT EQU P1.0 ; 红外脉冲输出端口speak equ p1.1;********************************************;* 中断入口程序 *;********************************************;ORG 0000HLJMP STARTORG 0003HLJMP PINT0ORG 000BHretiORG 0013HRETIORG 001BHLJMP INTT1ORG 0023HRETIORG 002BHRETI;;********************************************;* 主程序 *;********************************************;START: MOV SP,#4FHMOV R0,#40H ;40H-43H为显示数据存放单元(40H为最高位)MOV R7,#0BHCLEARDISP: MOV @R0,#00HINC R0DJNZ R7,CLEARDISPMOV 20H,#00HMOV TMOD,#11H ;T1为 T0为16位定时器MOV TH0,#00H ;65毫秒初值MOV TL0,#00HMOV TH1,#00HMOV TL1,#00HMOV P0,#0FFHMOV P1,#0FFHMOV P2,#0FFHMOV P3,#0FFHMOV R4,#04H ;超声波肪冲个数控制(为赋值的一半)SETB PX0SETB ET1SETB EASETB TR1 ;开启测距定时器start1: LCALL DISPLAYJNB 00H,START1 ;收到反射信号时标志位为1CLR EALCALL WORK ;计算距离子程序clr EAMOV R2,#32h;#64H ;测量间隔控制(约4*100=400MS)LOOP: LCALL DISPLAYDJNZ R2,LOOPCLR 00Hsetb et0mov th0,00hmov tl0,00hSETB TR1 ;重新开启测距定时器SETB EASJMP Start1;;**************************************************** ;* 中断程序* *;****************************************************;T1中断,发超声波用 ;T1中断,65毫秒中断一次INTT1: CLR EACLR TR0clr ex0MOV TH0,#00HMOV TL0,#00HMOV TH1,#00HMOV TL1,#00HSETB ET0SETB EASETB TR0 ;启动计数器T0,用以计intt11:CPL VOUT ;40KHZnopnopnopnopnopnopnopnopnopDJNZ R4,intt11;超声波发送完毕,MOV R4,#04Hlcall delay_250 ;延时,避开发射的直达声波信号SETB EX0 ;开启接收回波中断RETIOUT: RETI;外中断0,收到回波时进入PINT0: nopjb p3.2,pint0_exitCLR TR0 ;关计数器CLR EA ;CLR EX0 ;MOV 44H,TL0 ;将计数值移入处理单元MOV 45H,TH0 ;mov th0,#00hmov tl0,#00hjnb p3.2,$SETB 00H ;接收成功标志pint0_exit:RETI;;**************************************************** ;* 显示程序 *;**************************************************** ; 40H为最高位,43H为最低位,先扫描高位DISPLAY: MOV R1,#40H;GMOV R5,#7fH;GPLAY: MOV A,R5MOV P0,#0FFHMOV P2,AMOV A,@R1MOV DPTR,#TABMOVC A,@A+DPTRMOV P0,ALCALL DL1MSINC R1MOV A,R5JNB ACC.4,ENDOUT;GRR AMOV R5,AAJMP PLAYENDOUT: MOV P2,#0FFHMOV P0,#0FFHRET;TAB: DB 18h, 7Bh, 2Ch, 29h, 4Bh, 89h, 88h, 3Bh, 08h, 09h,0ffh ;共阳段码表 "0" "1" "2" "3" "4" "5""6" "7" "8" "9" "不亮""A""-" ;;****************************************************;* 延时程序 *;****************************************************;DL1MS:push 06hpush 07hMOV R6,#14HDL1: MOV R7,#19HDL2: DJNZ R7,DL2DJNZ R6,DL1pop 07hpop 06hRET;;****************************************************;* 距离计算程序 (=计数值*17/1000cm) *;****************************************************;work: PUSH ACCPUSH PSWPUSH BMOV PSW, #18hMOV R3, 45HMOV R2, 44HMOV R1, #00DMOV R0, #17DLCALL MUL2BY2MOV R3, #03HMOV R2, #0E8HLCALL DIV4BY2LCALL DIV4BY2MOV 40H, R4MOV A,40HJNZ JJ0MOV 40H,#0AH ;最高位为零,不点亮JJ0: MOV A, R0MOV R4, AMOV A, R1MOV R5, AMOV R3, #00DMOV R2, #100DLCALL DIV4BY2MOV 41H, R4MOV A,41HJNZ JJ1MOV A,40H ;次高位为0,先看最高位是否为不亮SUBB A,#0AHJNZ JJ1MOV 41H,#0AH ;最高位不亮,次高位也不亮JJ1: MOV A, R0MOV R4, AMOV A, R1MOV R5, AMOV R3, #00DMOV R2, #10DLCALL DIV4BY2MOV 42H, R4MOV A,42HJNZ JJ2MOV A,41H ;次次高位为0,先看次高位是否为不亮SUBB A,#0AHJNZ JJ2MOV 42H,#0AH ;次高位不亮,次次高位也不亮JJ2: MOV 43H, R0POP BPOP PSWPOP ACCRET;;****************************************************;* 两字节无符号数乘法程序 *;****************************************************; R7R6R5R4 <= R3R2 * R1R0超声波专用发射接收头,有T字样的是发射头,标有R字样的是接收头。
测距仪中文说明

超声波测距仪在国外称之为'电子尺'是完全适用于家庭装修、买空调时计算面积体积、房地产代理商或建筑工人所必须的、需要的快速测量房间和房间面积的工具,超声波测距仪能够测量直线距离从0.50M到18M。
(1.5英尺—60英尺) 超声波测距仪是利用发射超声波到被测物体,然后计算超声波往返时间来确定测量距离的。
测量范围:50cm-18m最大测量距离:18m最大距离之和:180.00m最大计算面积:18×18㎡最大计算体积:1800.0m³电池:9v干电池发射频率:40kHz精确度:±0.5%分辨率:0.01m工作温度:0℃-50℃1. 按照电池室箭头的方向去放.2. 盖是推滑开的,电池室里有正负(+和-)两极,3. 当显示电量低时或者测距仪不能运行时请更换电池。
4.打开此仪器,请按“MEASURER”即使在黯淡的光线下也能很容易显示屏幕,等电压稳定了,就可以看到当时的环境温度。
(30秒如果不用就自动关闭。
)5.测量时请按一下“MEASURE”,此仪器的雷达将会测出仪器到达所要测的另一端。
6.使仪器的底部靠近墙壁,大概是天花板到地板的距离。
确保你测量的距离之间没有障碍物,你的头或者你的手不要在测量仪的前面。
7.重复按“FEET”或者“METER”,“FEET”表示以英尺测量,或者是出现“METER”表示以米测量。
1.超声波测距仪测试的是障碍物离机器底部的距离,而不是顶部距离,如果以顶部为准,你会发现显示距离与实际距离永远有那么10几cm的误差,呵呵。
2.测量时机身与墙壁尽量保持垂直,尤其是所测距离较远时,越垂直,测量数据精度越高,反之斜度越大,误差越大。
长距离测量时建议开一下激光定位以尽量保持垂直.3.测量仪的显示一般是在30秒左右,如果你更换另一个模式也是要30秒左右。
如果你测量的范围小于2英尺(0.5米)或者是大于60英尺(18.288米)将会显示“ERROR”4.如果是一个月或者是一个月以上不用,请把电池取出,以免电池长时间不用漏液损坏仪器。
杭州联测 U-DCSDS-LCCN2 超声波测距传感器 使用说明书
2、0~5V: 蓝线: V +
黄线: V–
3、485/232 通讯: 黄线:T/R+ 蓝线: T/R–
4、继电器信号: 蓝线
黄线
4
6.信号说明
5、NPN 信号: 蓝线: NPN+ 黄线:NPN 6、PNP 信号: 蓝线: PNP+ 黄线: PNP备注:1、输出信号选择(1~6)其中一种;
2、要将黑线可靠接地; 3、当测距传感器为 mA 模块时,也可将黄线(mA-)接地;
产品包装内容
序号
物品名称
数量
备注
1
超声波测距传感器
1
2
说明书
1
3
合格证
1
II
目录
1. 产品简介.......................................................................................................1 2. 超声波测距原理...........................................................................................1 3. 产品特点.......................................................................................................1 4. 主要技术指标...............................................................................................2 5. 安装指南.......................................................................................................2
超声波测距仪课程设计说明书 精品

长沙学院《单片机原理及应用》课程设计说明书题目超声波测距仪系(部) 电信系专业(班级) 电气一班姓名周鹏学号2010042113指导教师刘辉、王新辉起止日期2013.6.10—6.21《单片机原理及应用》课程设计任务书21系(部):电信系专业:2010级电气工程指导教师:王新辉、刘辉课题名称超声波测距仪设计设计内容及要求(1)课题内容:设计一个以 STC89C52单片机为核心控制的超声波测距仪。
功能要求:1.测量距离范围要求为0.10~5.00m;2.测量精度为1cm;3.用12864液晶屏显示相关信息,液晶屏的第一行显示“超声波测距仪”,第二行显示设计者姓名和学号,第三行显示测量的距离值。
(2)要求:完成该系统的硬件和软件的设计,用单片机开发板进行验证。
最后就课程设计本身提交一篇课程设计说明书。
设计工作量1、汇编或C51语言程序设计;2、程序调试;3、在单片机开发板上进行下载调试;4、提交一份完整的课程设计说明书,包括设计原理、程序设计、程序分析、调试过程,参考文献、设计总结等。
进度安排起止日期(或时间量)设计内容(或预期目标)备注第一天课题介绍,答疑,收集材料,C51介绍第二天设计方案论证,练习编写C51程序第三天~第六天程序设计第六天~第八天程序调试、仿真第九天~第十天系统测试并编写设计说明书教研室意见年月日系(部)主管领导意见年月日长沙学院课程设计鉴定表姓名学号专业班级设计题目指导教师指导教师意见:评定等级:教师签名:日期:答辩小组意见:评定等级:答辩小组长签名:日期:教研室意见:教研室主任签名:日期:系(部)意见:系主任签名:日期:说明课程设计成绩分“优秀”、“良好”、“及格”、“不及格”四类;目录摘要 (2)1、基本原理 (3)2、方案论证 (3)3、系统硬件设计 (3)3.1 STC89C52外围电路设计 (4)3.2 超声波测距模块电路设计 (5)3.3 显示电路设计 (7)4、系统软件设计 (7)4.1 系统软件设计说明 (7)4.2编程语言的选择 (8)4.3超声波测距仪的算法设计 (8)4.4 超声波发生子程序和超声波接收中断程序设计 (8)4.5 显示子程序设计 (9)4.6主程序流程图 (9)5、设计结果及分析 (9)6、使用说明 (11)7、课程设计体会 (11)参考文献 (12)附录:程序清单 (13)摘要由于超声波指向性强,能量消耗缓慢,在介质中传播的距离较远,因而超声波经常用于距离的测量。
KS103超声波测距模块说明书

损坏电路。超过 3 秒钟的电路反接将可能导致不可恢复的损坏。
具体连线如下图所示(20 个):
VCC VCC
R1
R2
4.7K
4.7K
VCC SDA SCL GND
2
修改 I C 地址时序:
地 址
2 0x9a
延时 1ms
地 址
2 0x92
延时 地 1ms 址
2
0x9e
延时 1ms
地 2 新地
址
址
延时 100ms
修改 I2C 地址须严格按照时序来进行,时序中的延时时间为最小时间。对于 51 单片机主机,
其可调用附件 3 所示的 change_i2c_address(addr_old,addr_new)函数来实现。
制指令唤醒。
1
在 KS101B/KS103/KS103S 上连线引脚上标识有:VCC、SDA/TX(简称 SDA)、SCL/RX(简 称 SCL)、GND 及 MODE。MODE 引脚为 I2C 模式与 TTL 串口模式设置引脚,该引脚悬空时, KS101B/KS103/KS103S 工 作 于 I2C 模 式 ; 在 上 电 之 前 MODE 引 脚 接 0V 地 时 , KS101B/KS103/KS103S 工作于 TTL 串口模式。此处的 TTL 串口不是 232 串口,TTL 电平可以 与单片机的 TXD/RXD 直接相连,但不能与 232 串口直接相连(直接连将烧坏本模块),需要一个 MAX232 电平转换将 TTL 电平转换为 232 电平才可以。
医疗行业超声波检测仪器使用方法说明书

医疗行业超声波检测仪器使用方法说明书1.引言超声波检测仪器在医疗行业中扮演着重要的角色,能够提供非侵入性的影像检测和诊断支持。
本说明书旨在介绍超声波检测仪器的使用方法,以帮助医疗工作者正确操作和使用该设备,提高诊断的准确性和效率。
2.设备概述超声波检测仪器主要由超声发生器、传感器、显示屏和控制面板等部件组成。
该设备利用超声波的回波来生成图像,提供医生对患者内部组织和器官的可视化观察。
3.准备工作在使用超声波检测仪器之前,请确保以下准备工作已完成:(1) 确认设备的电源连接正常,并保证电量充足。
(2) 检查传感器是否连接完好,无损坏或松动。
(3) 准备好消毒液和无菌探头套,以确保设备和探头的清洁卫生。
4.设备操作(1) 打开设备电源,等待设备启动并进入正常工作状态。
(2) 选取合适的探头,并将其连接到设备上。
(3) 将无菌探头套戴在探头上,确保其与患者接触之前已经清洁消毒。
(4) 选择适当的扫描模式和频率,并根据需要进行调整。
(5) 调整超声波的增益和深度,以获得清晰的图像。
(6) 将涂有适当超声传导剂的探头放置在患者身体相应的部位,并轻轻移动探头,以获取所需的图像。
(7) 在获取图像时,可以通过调节对比度、亮度和图像的深度来优化图像质量。
(8) 完成检查后,及时将使用过的探头进行清洁消毒,并将其放置在干燥清洁的存放处。
5.注意事项(1) 在操作设备之前,必须经过相关培训,并熟悉设备的使用说明。
(2) 检查设备和探头的完整性,如有损坏或故障应及时维修或更换。
(3) 使用超声波传导剂时,需遵循相关操作规程,确保安全和卫生。
(4) 避免将探头过度挤压或过度摩擦,以免损坏设备和伤害患者。
(5) 定期对设备进行维护保养,包括清洁、校准和更新软件等工作。
(6) 在使用过程中,如发现任何异常情况或故障,应及时停止使用并通知相关技术人员。
6.结论超声波检测仪器在医疗行业的应用越来越广泛,为医生提供了强有力的诊断工具。
超声波测距仪使用说明书
超声波测距仪使用说明书一、产品概述超声波测距仪是一种常用的测量工具,能够通过发射超声波并接收回波来测量距离。
本使用说明书将详细介绍超声波测距仪的安装、操作和注意事项,以确保用户正确有效地使用该设备。
二、产品特点1. 高精度测距:超声波测距仪采用先进的超声波传感技术,具有高精度的测量能力。
2. 非接触式测量:使用超声波进行测距,无需物体接触,减少了测量过程中的损耗和影响。
3. 易于使用:超声波测距仪操作简便,具备用户友好的界面和按键设计,使得使用者能够迅速上手。
4. 多功能显示:该设备配备了清晰的液晶显示屏,能够显示测量结果、工作状态等信息。
5. 轻便便携:超声波测距仪体积小巧,重量轻,方便携带和使用。
三、安装步骤1. 打开包装:将超声波测距仪打开包装箱,确保所有附件完整无损。
2. 安装电池:打开超声波测距仪的电池仓盖,将配套电池正确安装,注意正负极的对应关系。
3. 固定支架:如需要,可以将超声波测距仪安装在合适的支架上,确保其稳定性和固定性。
四、操作步骤1. 打开设备:按下电源开关,超声波测距仪将开始工作。
2. 选择测量模式:根据需要,选择合适的测量模式,如单次测量模式、连续测量模式等。
3. 对准目标物体:将超声波测距仪对准需要测量的目标物体,确保设备与目标物体之间没有遮挡物。
4. 发射超声波:按下测量按钮,设备将发射一束超声波,并等待回波信号。
5. 接收回波:设备会接收到目标物体反射回的超声波信号,并进行测量计算。
6. 显示测量结果:测量结果将显示在液晶显示屏上,用户可以查看测量距离等相关信息。
五、注意事项1. 测量范围:超声波测距仪具有一定的测量范围,在使用过程中请确保测量距离在设备规定的范围内。
2. 测量环境:避免在有强烈干扰或噪音的环境下进行测量,以免影响测量结果的准确性。
3. 遮挡物:在进行测量时,确保超声波测距仪与目标物体之间没有遮挡物,以免影响信号的传输和接收。
4. 清洁保养:定期清洁超声波测距仪的传感器和显示屏,避免灰尘和污物的积累影响测量性能。
超声波测距仪设计说明书

1.1设计内容随着科学技术的快速发展,超声波将在传感器中的应用越来越广。
超声波测距与其它非接触式的检测方式方法相比,如电磁的或光学的方法它不受光线,被测对象颜色,电磁干扰等影响。
超声波对于被测物体处于黑暗,有灰尘,烟雾,电磁干扰,有毒等恶劣的环境有一定的适应能力[2]。
因此在液位测量,机械手控制,车辆自动导航,物体识别等方面有广泛应用。
特别是应用于空气测距,由于空气中波速较慢,其回波信号中包含的沿传播方向上的结构信息很容易检测出来,具有很高的分辩力,因而其准确度也较其它方法高,而且超声波传感器具有结构简单,体积小,信号处理可靠等特点[3]。
本次设计主要是利用STC12LE5406AD 单片机、超声波传感器完成测距报警系统的制作,以STC12LE5406AD 为主控芯片,利用超声波对距离的检测,将前方物体的距离探测出来,然后单片机处理运算,与设定的报警距离值进行比较判断,当测得距离小于设定值时,STC12LE5406AD 发出指令控制蜂鸣器报警。
1.2 设计要求随着科学技术的快速发展,超声波将在测距仪中应用越来越广泛。
其原理是:以STC12LE5406AD 为主控芯片,实现发射电路的控制和接收数据的处理,并用数码管显示测量的数据。
具体指标要求是:指标1:测量精度-1~+1cm指标2:显示四位本系统在“报警”方面进行创新,其功能是:创新1:设定报警距离值,当测得距离小于设定值时,蜂鸣器报警1.3 系统总体结构本设计包括硬件和软件设计两个部分。
模块划分为数据采集、按键控制、四位数码管显示、报警等子模块。
电路结构可划分为:超声波传感器、蜂鸣器、单片机控制电路。
就此设计的核心模块来说,单片机就是设计的中心单元,所以此系统也是单片机应用系统的一种应用。
单片机应用系统也是有硬件和软件组成。
硬件包括单片机、输入/输出设备、以及外围应用电路等组成的系统,软件是各种工作程序的总称。
单片机应用系统的研制过程包括总体设计、硬件设计、软件设计等几个阶段。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
湄洲湾职业技术学院超声波测距仪说明书系别: 自动化工程系年级:10级专业: 电气自动化技术姓名: 郑学号:**********导师姓名: 李志杰职称: 讲师2013年05月29日目录1 前言 (1)2 系统设计参数要求 (2)3 系统设计 (3)3.1系统设计总体框图 (3)3.2超声波测距原理 (4)3.3系统构成 (5)3.4硬件电路设计 (5)3.5传感器介绍 (6)3.5.1超声波传感器原理 (6)4 系统模块 (7)4.1超声波发射模块 (7)4.2超声波接收模块 (8)4.3LCD显示模块 (9)4.4系统印刷电路板的制作图 (9)5 系统软件设计 (10)5.1超声波测距的算法 (10)5.2程序流程图 (10)5.3超声波温度补偿子程序流程图 (11)5.4超声波测距子程序流程图 (12)5.5系统操作说明 (13)5.6系统操作注意事项 (13)参考文献 (14)致谢语 (15)系统附录 (16)附录一原理总图 (16)附录二印刷电路图 (17)附录三元件清单 (18)附录四程序流程 (19)1 前言本设计是以单片机技术为基础,实现对前方物体距离的测量。
根据超声波指向性强,能量消耗慢,在介质中传播距离远的特点,利用超生波传感器对前方物体进行感应,经过单片机中的程序对超声波传感器发射和接收的超声波信号进行分析和计算处理,最后将处理结果在LCD1602上显示。
STC89C52单片机的超声波测距系统,此系统根据超声波在空气中传播反射原理,把超声波传感器作为接口部件,利用超声波在空气中传播的时间差来测量距离,设计了一套超声波检测系统。
该系统设计主要由主控制器模块、超声波发射模块、超声波接收模块和显示模块等四个基本模块构成,用接收部分接收超声波。
本设计利用两个中断,在发射信号时,打开定时器中断0和外部中断0使定时器计时,接收到发射超声波信号时,外部中断0关闭中断,这时定时器中断0计录的时间就为超声波传播经过测距仪到前方物体的来回时间。
利用公式S=T×V/2(V为超生波传播速度,本设计设定值340m/s),经过单片机处理得到距离值S并且通过LCD1602显示出来。
除此外系统还能显示系统的实时时间。
2 系统设计参数要求(1)键盘扫描,通过单片机检测用户按下的是哪个按键并执行相应的功能。
(2)通过超声波测距模块检测超声波模块到障碍物之间的距离,并在LCD1602上显示上一次测量的距离.(3)通过单片机采集DS1302的数据,并在液晶屏幕上显示实时的年月日时分秒,并可以通过按键设置时间。
3 系统设计3.1系统设计总体框图3-1系统设计总体框图3.2超声波测距原理3.2 1超声波基本原理超声波是一门以物理、电子、机械、以及材料科学为基础的、各行各业都要使用的通用技术之一。
该技术在国民经济中,对提高产品质量,保障生产安全和设备安全运作,降低生产成本,提高生产效率特别具有潜在能力。
因此,我国对超声波的研究特别活跃。
超声技术是通过超声波的产生、传播以及接收的物理过程完成的。
超声波具有聚束、定向及反射、投射等特性。
按超声波振动辐射大小不同大致可以分为:用超声波使物体或物性变化的功率应用,称之为功率超声;用超声波获取信息,称为检测超声。
3.2 2超声波测距仪原理超声波发射器向某一方向发射超声波,在发射时刻的同时开始计时,超声波在空气中传播,途中碰到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时,如图3-2所示。
超声波在空气中的传播速度为v,根据计时器记录的时间t,就可以计算出发射点距障碍物的距离(s),即:(公式1-1)图3-2 超声波测距原理图这就是所谓的时间差测距法[7],由于是利用超声波测距,要测量预期的距离,所以产生的超声波要有一定的功率和合理的频率才能达到预定的传播距离,同时这是得到足够的回波功率的必要条件,只有的得到足够的回波频率,接收电路才能检测到回波信号和防止外界干扰信号的干扰。
经分析和大量实验表明,频率为40KHz左右的超声波在空气中传播效果最佳,同时为了处理方便,发射的超声波被调制成具有一定间隔的调制脉冲波信号。
3.3系统构成本设计是在超声波原理的基础上,完成了基于时差测距原理的一种超声波测距系统设计。
测距仪以AT89S52芯片为核心,74LS04组成的超声波发射电路、并由超声波处理模块CX20106A、液晶显示等器件组成,包括单片机系统、超声波发射电路、超声波接收电路、LCD 显示电路。
依据实际的测量精度要求添加温度补偿电路,避免了环境误差,能够清晰稳定的显示结果。
由单片机发出40kHz的方波信号进入超声波发射电路,经功率放大芯片放大后进入超声波发射头。
超声波发射头发射的超声波在空气中传播一段时间后经前方被检测物体反射回来,由超声波接收头接收,超声波电路中的接收芯片对信号放大整形,超声波接收电路接收回波后发出一个下拉电平使单片机进入中断程序,在中断程序中,单片机从温度检测电路读取数值并换算成当前温度下的声速,应用时差法计算所检测的距离,最后所有的数据都在LED显示电路上显示。
结构图如图3-3所示。
图3-3 系统结构图3.4硬件电路设计单片机又称单片微控制器,它不是完成某一个逻辑功能的芯片,而是把一个计算机系统集成到一个芯片上,大大缩短了系统内信号传送距离,从而提高了系统的可靠性及运行速度。
因而在工业测控领域中,单片机系统是最理想的控制系统。
所以,单片机是典型的嵌入式系统,是嵌入式系统低端应用的最佳选择。
3.5传感器介绍3.5.1超声波传感器原理超声波传感器主要材料有压电晶体(电致伸缩)及镍铁铝合金[8](磁致伸缩)两类。
电致伸缩的材料有锆钛酸铅(PZT)等。
压电晶体组成的超声波传感器是一种可逆传感器,它可以将电能转变成机械振荡而产生超声波,同时它接收到超声波时,也能转变成电能,所以它可以分成发送器或接收器。
小型超声波传感器,发送与接收略有差别,它适用于在空气中传播,工作频率一般为23-25kHz及40-45kHz。
这类传感器适用于测距、遥控、防盗等用途。
若对发送传感器内谐振频率为40kHz的压电陶瓷片(双晶振子)施加40kHz高频电压,则压电陶瓷片就根据所加高频电压极性伸长与缩短,于是发送40kHz频率的超声波,其超声波以疏密形式传播( 疏密程度可由控制电路调制),并传给波接收器。
接收器是利用压力传感器所采用的压电效应的原理,即在压电元件上施加压力,使压电元件发生应变,则产生一面为“+”极,另一面为“-”极的40kHz正弦电压。
因该高频电压幅值较小,还必须进行放大。
DS18B20温度传感器本系统选用DS18B20温度传感器[9]作为误差补偿装置。
DS18B20是美国DALLAS半导体公司生产的1—WIRE数字温度传感器,它可实现数字化输出和测试,并且有控制功能强、传输距离远、抗干扰能力强、微功耗等特点。
DS18B20的主要特性:(1)适应电压范围更宽,电压范围3.0~5.5V,在寄生电源方式下可由数据线供电。
(2)独特的单线接口方式,DS18B20在与微处理器连接时仅需要一条口线即可实现微处理器与DS18B20的双向通讯。
(3)DS18B20支持多点组网功能,多个DS18B20可以并联在唯一的三线上,实现组网多点测温。
(4)DS18B20在使用中不需要任何外围元件,全部传感元件及转换电路集成在形如一只三极管的集成电路内。
(5)温范围-55℃~+125℃,在-10~+85℃时精度为±0.5℃。
(6)可编程的分辨率为9~12位,对应的可分辨温度分别为0.5℃、0.25℃、0.125℃和0.0625℃,可实现高精度测温。
(7)测量结果直接输出数字温度信号,以"一线总线"串行传送给CPU,同时可传送CRC 校验码,具有极强的抗干扰纠错能力。
(8)负压特性:电源极性接反时,芯片不会因发热而烧毁,但不能正常工作。
4 系统模块4.1超声波发射模块超声波发生器包括超声波产生电路和超声波发射控制电路两个部分,超声波探头的型号选用CSB40T(其中心频率为40KHz)。
可以采用软件产生40KHz的超声波信号,通过输出引脚输入至驱动器,经过动器驱动后推动探头产生超声波。
这种方法的特点是充分利用软件,灵活性好,但是需要设计一个驱动电流为100mA以上的驱动电路。
第二种方法是利用超声波专用发生电路或通用发生电路产生超声波信号,并直接驱动超声波换能器产生超声波。
这种方法的特点是无需驱动电路,但缺乏灵活性。
本次我们采用第一种方法产生超声波,非门可以选用74LS04,具体电路如图4-1所示。
4-1发射电路图从图中可知,当输入的信号为高电平时,上面经过两级反向CSB40T的1引脚为高电平,下面经过一级反向后为低电平;当输入信号为低电平时,正好相反,实现了振荡的信号驱动CSB40T,只要控制信号接近40KHz,就能产生超声波。
4.2超声波接收模块超声波接收包括接收探头,信号放大以及波形变换电路三部分,超声波接收探头必须与发送探头相同的型号,否则可能导致接收效果甚至不能接收。
由于超声波接收探头的信号非常弱,所以必须用放大器放大,放大后的正弦波不能被微处理器处理,所以必须经过波形变换。
本次设计为了降低调试难度,减少成本,提供系统可靠性,所以我们采用了一种用在彩色电视机上面的一种红外接收检波芯片[10]CX20106,由于红外遥控的中心频率在38KHz,和超声波的40KHz很接近,所以可以用来做接收电路。
接受电路如图4-2所示。
图4-2 接收电路图使用CX20106A集成电路对接收探头受到的信号进行放大、滤波。
其总放大增益80db。
以下是CX20106A的引脚注释。
(1)1脚:超声信号输入端,该脚的输入阻抗约为40kΩ。
(2)2脚:该脚与地之间连接RC串联网络,它们是负反馈串联网络的一个组成部分,改变它们的数值能改变前置放大器的增益和频率特性。
增大电阻R4或减小C4,将使负反馈量增大,放大倍数下降,反之则放大倍数增大。
但C4的改变会影响到频率特性,一般在实际使用中不必改动,推荐选用参数为R4=10Ω,C4=1μf(3)3脚:该脚与地之间连接检波电容,电容量大为平均值检波,瞬间相应灵敏度低;若容量小,则为峰值检波,瞬间相应灵敏度高,但检波输出的脉冲宽度变动大,易造成误动作,推荐参数为3.3μf。
(4)4脚:接地端。
(5)5脚:该引脚与电源间接入一个电阻,用以设置带通滤波器的中心频率f0,阻值越大,中心频率越低。
(6)6脚:该引脚与地之间接一个积分电容,标准值为330pF,如果该电容取得太大,会使探测距离变短。
(7)7脚:遥控命令输出端,它是集电极开路输出方式,因此该引脚必须接上一个上拉电阻到电源端,推荐阻值为22kΩ,没有接受信号是该端输出为高电平,有信号时则产生下降。