基础架构-(IT人员李延昌)
智能制造体系架构、参考模型与标准化框架研究

收 稿 日期 :2016—11—14;修 订 日期 :2017~05—02。Received 14 Nov.2016;accepted 02 May 2017. 基金项 目:国家 863计 划资助项 目(2001AA415340,2007AA04ZIA6);国家 自然科 学基金 资助项 目(61174168,61771281);中国航 空科学基 金
第4章 大数据系统处理-大数据-李联宁-清华大学出版社

4.1 大数据处理基础架构--云计算
MapReduce 架构设计
4.1 大数据处理基础架构--云计算
MapReduce的工作原理其实是先分后合的数据 处理方式。
Map即“分解”,把海量数据分割成了若干部分 ,分给多台处理器并行处理;
Reduce即“合并”,把各台处理器处理后的结 果进行汇总操作以得到最终结果。
4.1 大数据处理基础架构--云计算
2. Hadoop架构 • Hadoop是一个处理、存储和分析海量的分布式、
非结构化数据的开源框架。 • 最初由雅虎的Doug Cutting创建,Hadoop的灵感
来自于 MapReduce , Hadoop集群运行在廉价的 商用硬件上,这样硬件扩展就不存在资金压力。 • 其基本概念与将海量数据限定在一台机器运行的方 式不同,Hadoop将大数据分成多个部分,这样每 个部分都可以被同时处理和分析。
4.1 大数据处理基础架构--云计算
• 在Google发表MapReduce后,2004年开源社群用 Java搭建出一套Hadoop框架,用于实现 MapReduce 算法,能够把应用程序分割成许多很 小的工作单元,每个单元可以在任何集群节点上执 行或重复执行。
• 此外,Hadoop 还提供一个分布式文件系统GFS( Google file system),是一个可扩展、结构化、 具备日志的分布式文件系统,支持大型、分布式大 数据量的读写操作,其容错性较强。
• 大数据必然无法用单台的计算机进行处理,必须采 用分布式架构。
• 它的特色在于对海量数据进行分布式数据挖掘。 • 但它必须依托云计算的分布式处理、分布式数据库
和云存储、虚拟化技术。
4.1 大数据处理基础架构--云计算
自主可控可编程控制系统架构及关键技术分析

自主可控可编程控制系统架构及关键技术分析李彬邯郸市第一医院 河北邯郸 056004摘要:主要对自主可控可编程控制系统架构以及关键技术进行分析。
首先,对可编程控制系统架构特点进行分析,包括:选用实时以太网总线具有高同步性特点,同时应用具有标准化特色的应用层协议;主站从站通用化水平持续提升;功能呈现出丰富化发展趋势。
其次,对自主可控可编程控制系统关键技术及其实现进行分析,包括主站从站硬件标准化、实时以太网总线控制器、HMI组态编程、PLCopen功能库这4个方面的内容。
希望能够通过自主可控可编程控制系统关键技术的综合应用,促进可编程控制系统优化发展,进而在工业控制产品自主化建设发展方面起到积极作用与价值。
关键词:自主可控 可编程控制系统 架构 关键技术中图分类号:TP274文献标识码:A 文章编号:1672-3791(2024)03-0019-04 Analysis of the Architecture and Key Technologies of theAutonomous Controllable Programmable Control SystemLI BinHandan First Hospital, Handan, Hebei Province, 056004 ChinaAbstract:The article analyzes the architecture and key technologies of the autonomous controllable programmable control system. Firstly, it analyzes the architectural characteristics of the programmable control system, including the selection of the real-time Ethernet bus with the characteristics of high synchronization and the application of the application layer protocol with standardized characteristics, the continuou improvement of the generalization level of master and slave stations, and the development trend of function enrichment. Then it analyzes the key technolo‐gies and implementation of the autonomous controllable programmable control system, including four aspects: the standardization of hardware in master and slave stations, the real-time Ethernet bus controller, HMI configuration programming, and the PLCopen functional library, hoping to promote the optimization and development of the programmable control system through the comprehensive application of the key technologies of the autonomous controllable programmable control system, and then play a positive role and value in the autonomous construction and development of industrial control products.Key Words: Autonomous and controllable; Programmable control system; Architecture; Key technology可编程控制系统将现场总线控制系统、可编程逻辑控制器以及嵌入式计算机系统引入系统内部,作为工业装备自动化控制的中枢神经系统,在智能化工厂信息自动化采集、实时控制、安全防护、过程监控等相关功能的实现过程中发挥重要作用。
《从0开始学架构》——学习笔记(基础篇和高性能篇)
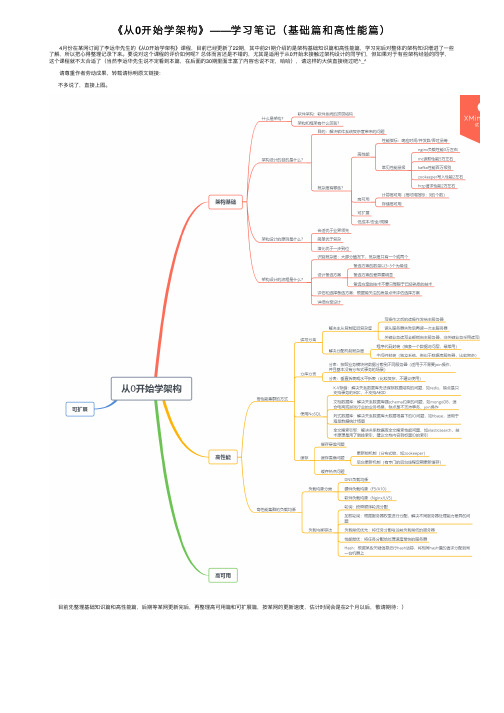
《从0开始学架构》——学习笔记(基础篇和⾼性能篇)
4⽉份在某⽹订阅了李运华先⽣的《从0开始学架构》课程,⽬前已经更新了22期,其中前21期介绍的是架构基础知识篇和⾼性能篇,学习完后对整体的架构知识增进了⼀些了解,所以把⼼得整理记录下来。
要说对这个课程的评价如何呢?总体⽽⾔还是不错的,尤其是适⽤于从0开始未接触过架构设计的同学们,但如果对于有些架构经验的同学,这个课程就不太合适了(当然李运华先⽣说不定看到本篇,在后⾯的30期⾥⾯丰富了内容也说不定,哈哈),请这样的⼤侠直接绕过吧^_^
请尊重作者劳动成果,转载请标明原⽂链接:
不多说了,直接上图。
⽬前先整理基础知识篇和⾼性能篇,后期等某⽹更新完后,再整理⾼可⽤篇和可扩展篇,按某⽹的更新速度,估计时间会是在2个⽉以后,敬请期待:)。
知乎技术体系——董成城:知乎基础架构负责人
自建镜像(pypi和deb) fpm puppet
SACC2013
如何监控?
全面 精准 即时
SACC2013
指标搜集
statsd(statsite) 应用主动输出指标 collectd 主动获取指标 kids 订阅日志,取出相关指标 各种后台小脚本 其他各种不方便获取的指标
SACC2013
存储和展现
SACC2013
如何部署?
简单(轻量) 可控(隔离) 可追溯(历史记录)
SACC2013
应用部署
git + marvin(fabric) 各个系统开发人员自己负责上线 部署脚本是开发的一部分 公共部署平台:Heroin 一键部署主站 后续加入部署其他系统
SACC2013
SACC2013
基础设施和基础库
SACC2013
SACC2013
日志工具kids
what? pub/sub模式的日志搜集系统 why? scribe不支持实时订阅 其他依赖多,且基本都是java的,不够小清新 redis很好,但是没有持久化 how? c++实现,无三方依赖 redis协议 scribe模式
agent端
log { level info; file /data/log/kids/kids.log; } # for agent listen { host 127.0.0.1; port 3388; } store buffer { store network primary { host kids; port 3388; } store file secondary { path /data/data/kidsbuf; rotate 5min; } }
graphite 最终指标的存储和绘图 Descartes graphite看板
《网络工程)课件 第7章 网络中心构建和网络管理
• •
7.1.1 网络服务器组成和分类
(2) 按应用层次划分 • • • • 入门级服务器: ① 入门级服务器: 最基础的一类服务器 ② 工作组服务器: 稍高一个层次的服务器 。 工作组服务器: 部门级服务器: 支持双CPU以上的对称处 ③ 部门级服务器: 支持双 以上的对称处 理器结构 企业级服务器: 采用4个以上 个以上CPU的对称 ④ 企业级服务器: 采用 个以上 的对称 处理器结构
7.1.2 网络服务器专业技术
• 服务器的构成与微机基本相似,有处理器、硬盘、 服务器的构成与微机基本相似,有处理器、硬盘、 内存、系统总线等, 内存、系统总线等,它们是针对具体的网络应用 特别制定的。 特别制定的。 • 因而相对于普通 来说,服务器在稳定性、安全 因而相对于普通PC来说,服务器在稳定性、 来说 性能等方面都要求更高。 性、性能等方面都要求更高。 • 因此 因此CPU、芯片组、内存、磁盘系统、网络等硬 、芯片组、内存、磁盘系统、 件和普通PC有所不同 有所不同。 件和普通 有所不同。
7.1.1 网络服务器组成和分类
1. 服务器( Server ) 服务器( • 根据不同的计算能力, 根据不同的计算能力,服务器分为工作组级服 务器,部门级服务器和企业级服务器。 务器,部门级服务器和企业级服务器。 • 服务器操作系统有: 服务器操作系统有: 操作系统( (1)类Unix 操作系统(Linux、Solaris、Mac OS ) 、 、 X Server、和SCO OpenServer) 、 ) (2)微软 )微软Microsoft Windows服务器版本 服务器版本 (Windows Server 2003、Windows Server 2008) 、 )
7.1.1 网络服务器组成和分类
系统架构设计师一本通-精华知识点

系统架构设计师一本通-精华知识点一、系统架构基础概念。
1. 架构定义与目标。
- 系统架构是对系统的组成结构、元素间关系、系统与环境间关系等的高层次描述。
其目标包括满足功能需求、非功能需求(如性能、可靠性等),并为系统的演进提供框架。
- 例如,企业级信息系统架构需要考虑不同业务模块间的数据交互、用户访问权限管理等多方面因素。
2. 架构视图。
- 逻辑视图:描述系统的功能组件及其关系,关注系统的功能需求。
如电商系统中用户管理、商品管理、订单处理等功能模块的逻辑关系。
- 物理视图:涉及系统的硬件、软件在物理环境中的部署。
例如,服务器的分布、网络设备的连接等。
- 开发视图:着眼于软件开发过程中的模块划分、代码结构等。
对于大型软件项目,合理的开发视图有助于提高代码的可维护性和开发效率。
- 进程视图:主要针对系统运行时的进程、线程等的交互与调度。
在多用户并发访问的系统中,进程视图能帮助优化资源分配和提高响应速度。
3. 架构风格。
- 分层架构:将系统按照功能层次进行划分,如常见的三层架构(表示层、业务逻辑层、数据访问层)。
每层有明确的职责,层与层之间通过接口进行通信。
这种风格提高了系统的可维护性和可扩展性。
- 微服务架构:将系统拆分为多个小型、独立的服务,每个服务都可以独立开发、部署和扩展。
例如,在电商系统中,用户服务、商品服务、支付服务等微服务可以根据业务需求灵活组合和演进。
- 事件驱动架构:基于事件的产生和处理构建系统。
在物联网系统中,传感器产生的事件可以触发相应的处理逻辑,如温度传感器检测到异常温度后触发报警机制。
二、需求工程。
1. 需求获取。
- 与用户、利益相关者进行沟通,采用的方法包括访谈、问卷调查、观察等。
例如,开发医疗信息系统时,通过与医生、护士、患者等不同角色的访谈,获取他们对系统功能和操作流程的需求。
- 收集业务流程、规则等信息。
对于金融系统,需要深入了解各种金融业务的交易规则、风险控制流程等需求。
IT开发L1、L2题库汇总
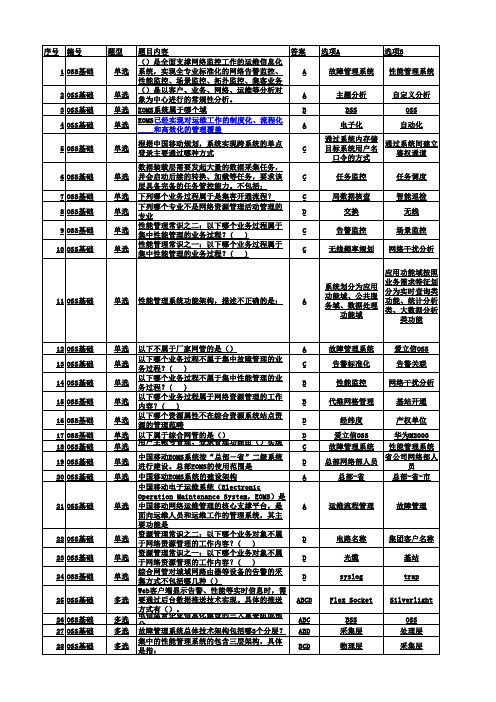
12 OSS基础 13 OSS基础 14 OSS基础 15 OSS基础 16 OSS基础 17 OSS基础 18 OSS基础 19 OSS基础 20 OSS基础
21 OSS基础
22 OSS基础 23 OSS基础 24 OSS基础
25 OSS基础 26 OSS基础 27 OSS基础 28 OSS基础
EOMS已经实现对运维工作的制度化、流程化 ____和高效化的管理覆盖
答案 A
A B A
单选
根据中国移动规划,系统实现跨系统的单点 登录主要通过哪种方式
C
数据装载层需要发起大量的数据采集任务,
单选 并会启动后续的转换、加载等任务,要求该
C
层具备完备的任务管控能力。不包括:
单选 下列哪个业务过程属于是集客开通流程?
以下属于综合网管的是() 用户主帐号管理、登录管理功能由()实现 。 中国移动EOMS系统按“总部-省”二级系统 进行建设。总部EOMS的使用范围是
中国移动EOMS系统的建设架构
中国移动电子运维系统(Electronic Operation Maintenance System,EOMS)是 中国移动网络运维管理的核心支撑平台,是 面向运维人员和运维工作的理的工作内容?( ) 资源管理常识之一:以下哪个业务对象不属 于网络资源管理的工作内容?( ) 综合网管对城域网路由器等设备的告警的采 集方式不包括哪几种() Web客户端显示告警、性能等实时信息时,需 要通过后台数据推送技术实现。具体的推送 方式有()。 电信运营企业信息化建设的三大重要组成部 分 故障管理系统总体技术架构包括哪3个分层?
BSS
OSS
电子化
自动化
通过系统内存储 目标系统用户名
口令的方式
云计算架构技术与实践(第2版)

7.4软件化L4~ L7网络功能
7.5网络虚拟化 端到端解决方 案
8.2典型的混合云 架构模式
8.1混合云的驱动 力与背景
8.3基于OpenStack 级联的开放异构混
合云
9.2基于Docker的 新型PaaS
9.1 PaaS简介
9.3消息中间件服 务
9.4数据库和缓 存服务
9.5大数据服务
精彩摘录
这是《云计算架构技术与实践(第2版)》的读书笔记模板,可以替换为自己的精彩内容摘录。
谢谢观看
05
11.5面向 多租户的企 业桌面公有 云服务
12.1基于开放 1
云平台的云生 态系统构建
12.2
2
Marketplace
系统架构
3 12.3面向电信
网络和业务云 化的CT编排自 动化——MANO
4 12.4面向IT应
用的IT编排自 动化——Heat & TOSCA
5 12.5 TOSCA
(云应用的拓 扑编排标准)
5
14.5云数据安 全
01
14.6公有 云、私有云 的安全组
02
14.7云安 全管理
03
14.8安全 即服务
04
14.9云安 全应用实施 案例
Hale Waihona Puke 0614.11云计 算服务法律 风险及其应 对
05
14.10云计 算安全的其 他考虑
作者介绍
这是《云计算架构技术与实践(第2版)》的读书笔记模板,暂无该书作者的介绍。
目录分析
第2版序言
1.2云计算的商业 动力:企业ICT转
型
1.1云计算基础概 念与架构
1.3企业云计算的 发展趋势
清华大学本科计算机课程介绍

课号:00240013 学分: 3 课程名称 中文 课程属性:全校任选 英文 开课学期:秋、春 Fundamentals of Computer-aided Design 出版社 清华大学出版社 出版年月 2002 年 8 月
计算机辅助设计技术基础 书名 作者
使用教材
计算机辅助设计技术基 础教程
本课程是计算机科学与技术系为全校本科生开设的一门重要的计算机专业基础 课,目的是培养学生的软件工程素质,提高学生的软件开发能力。 本课程以软件生命周期的主要活动为主线,从软件及软件工程的历史和发展、软 件开发过程、需求分析、软件设计、程序编码、软件测试、软件维护、软件项目管理、 标准及规范等方面全面介绍软件工程的基本理论、方法、技术和工具。
课号: 30240273 课程名称
学分: 3 中文
课程属性:本科必修 开课学期: 春季 数据结构 书名 作者 英文 Data Structure 出版社 出版年月 1997
使用教材 参考书 讲课对象 课 程 简 介
数据结构(C 语言版)
严蔚敏,吴伟民 清华大学出版社
[1] Kruse, et.al. Data Structures & Program Desing in C. [2] Knuth. The Art of Computer Programming. Volume 1. 本科生 适用专业 工业工程系 先修课 C 语言程序设计
This course focuses on the basic concepts, principles, algorithms and applications of computer-aided design(CAD), it mainly consists of the following topics: software and hardware system of CAD, two-dimensional transformations, line clipping, raster display of 2D graphics, curves Introduction and surfaces, solid modeling, three-dimensional transformations, three-dimensional viewing, visible-surface determination, basic illumination models, and introductions to AutoCAD, 3DMAX 5.0 and OpenGL. It is an ideal choice for students who want to learn the rudiments of this dynamic and exciting CAD technology. 姓 名 讲 课 教 师 职称 主要教学和科研领域 主要教学领域: (1)承担全校计算机辅助设计技术基础 课教学; (2)承担研究生的小波分析及其应用课教学; 主要研究领域:小波分析及其应用,科学计算可视化, 计算机图形学,几何造型和图象处理。 (1)承担全校计算机辅助设计技术基础课教学
运行无间:阿里巴巴运维保障体系的一种最佳实践
运行无间:阿里巴巴运维保障体系的一种最佳实践吴昌龙阿里巴巴全球运行指挥中心,GOC(Global Operations Center)是保障阿里经济体的线上业务稳定运行的核心团队。
2014年硕士毕业,专注于云计算。
先后就职于微电影,Melotic(比特币),Rakuten(日本第一大电商)。
2016年回国加入了阿里巴巴GOC,到现在一直专注于运维保障。
前言阿里巴巴全球运行指挥中心,GOC (Global Operations Center)保障阿里经济体的业务稳定运行的核心团队。
我们负责了整个阿里巴巴全局生产系统的稳定性。
就像业界经常提到谷歌的SRE,我们相当于阿里巴巴的SRE。
今天我的分享分为四个部分:1、稳定性现状及挑战2、运维保障体系介绍3、运行无间最佳实践4、未来的发展及方向一、稳定性现状及挑战提到阿里巴巴,不得不说刚刚过去的双十一。
在刚刚过去的双十一,每秒订单创建的峰值达到32.5万笔,每秒支付峰值达到25.6万笔。
相比2016年的17.5万笔和12.5万笔提升近80%。
相比去年的紧张状态,我们今年收到的普遍反馈是比较平稳。
同时,做为阿里巴巴双十一备战的一员,双十一当天切身感受到,喝着茶就把今年的双十一给过了的感觉。
并且业务上也再创新高,达到了1682亿,这是一个非常不容易的技术新高度。
如上图所示,阿里巴巴业务迅速扩展,对于稳定性保障来说非常有挑战性。
从基础架构层面来看:我们需要保障IDC,网络基础设施,安全,阿里云、阿里通信和钉钉;从业务层面来看,我们需要保障天猫、淘宝、手淘、蚂蚁金服、AE、飞猪、阿里妈妈、搜索;以及近期迅猛发展的新零售、大文娱业务,如盒马鲜生,村淘、云零售、优酷、阿里影业、阿里健康等。
今年9月28日,新零售盒马鲜生做了五城十店同开活动,一般来说开一家超市成本很高,而互联网的速度却是,可以一下子开起来,当然盒马鲜生不是就满足于一天可以开10个店的速度,未来是百家店、千家的店的速度。
面向多无人机协同飞行控制的云系统架构
第43卷 第12期2020年12月计 算 机 学 报CHINESEJOURNALOFCOMPUTERSVol.43No.12Dec.2020收稿日期:2019 06 17;在线发布日期:2020 01 18.本课题得到国家重点研发计划(2017YFB1001901)资助.史殿习,博士,研究员,中国计算机学会(CCF)会员,主要研究领域为人工智能、分布式计算、云计算及大数据处理等.E mail:dxshi@nudt.edu.cn.洪 臣,硕士,主要研究方向为人工智能、分布式计算及云计算等.康 颖(通信作者),博士,助理研究员,主要研究方向为人工智能、数据挖掘、社区发现等.E mail:kangying_841218@sina.com.金松昌,博士,助理研究员,主要研究方向为人工智能、数据挖掘、社区发现等.张拥军,博士,研究员,主要研究领域为高性能计算、分布式应用系统等.杨 东,学士,主要研究方向为有线通信、信息安全防护等.面向多无人机协同飞行控制的云系统架构史殿习1),2),3) 洪 臣4) 康 颖2),3),5) 金松昌2),3) 张拥军2) 杨 东5)1)(国防科技大学计算机学院 长沙 410073)2)(军事科学院国防科技创新研究院 北京 100166)3)(天津(滨海)人工智能创新中心 天津 300457)4)(中国人民解放军61932部队 北京 100071)5)(中国人民解放军31401部队 长春 130022)摘 要 有限的载荷使得无人机难以承载过多的仪器设备,其极大地限制了无人机上资源的交互、共享以及无人机遂行任务多样性的能力.多无人机智能协同成为AI领域发展的主流方向,但已有的多无人机系统存在通信距离受限、数据资源分离等问题,且因网络连接的不稳定性及数据传输的延迟性,多无人机间难以实现有效的协同控制.本文提出了一种面向多无人机协同飞行控制的云系统架构UAV3CA.UAV3CA在云端为多无人机构建了一个“远程大脑”,通过PaaS抽象封装无人机及其上资源,可实现多无人机间信息数据的实时共享,并基于云端强大的存储和计算能力完成多无人机的统一规划及协同飞行控制.实验从单无人机制导和多无人机协同两个方面,对UAV3CA在网络通信的稳定性、数据传输的实时性和协同控制的有效性等方面的性能给予了验证,最终以完美的编队队形呈现出UAV3CA协同控制方式的灵活多样性.关键词 多无人机;云系统架构;协同飞行控制;实时共享中图法分类号TP393 犇犗犐号10.11897/SP.J.1016.2020.02352犆犾狅狌犱 犅犪狊犲犱犆狅狀狋狉狅犾犛狔狊狋犲犿犃狉犮犺犻狋犲犮狋狌狉犲犳狅狉犕狌犾狋犻 犝犃犞狊犆狅狅狆犲狉犪狋犻狏犲犉犾犻犵犺狋SHIDian Xi1),2),3) HONGChen4) KANGYing2),3),5) JINSong Chang2),3)ZHANGYong Jun2) YANGDong5)1)(犛犮犺狅狅犾狅犳犆狅犿狆狌狋犲狉犛犮犻犲狀犮犲,犖犪狋犻狅狀犪犾犝狀犻狏犲狉狊犻狋狔狅犳犇犲犳犲狀狊犲犜犲犮犺狀狅犾狅犵狔,犆犺犪狀犵狊犺犪 410073)2)(犖犪狋犻狅狀犪犾犐狀狀狅狏犪狋犻狅狀犐狀狊狋犻狋狌狋犲狅犳犇犲犳犲狀狊犲犜犲犮犺狀狅犾狅犵狔,犃犮犪犱犲犿狔狅犳犕犻犾犻狋犪狉狔犛犮犻犲狀犮犲狊,犅犲犻犼犻狀犵 100166)3)(犜犻犪狀犼犻狀犃狉狋犻犳犻犮犻犪犾犐狀狋犲犾犾犻犵犲狀犮犲犐狀狀狅狏犪狋犻狅狀犆犲狀狋犲狉,犜犻犪狀犼犻狀 300457)4)(犘犲狅狆犾犲’狊犔犻犫犲狉犪狋犻狅狀犃狉犿狔狅犳犆犺犻狀犪犖狅.61932,犅犲犻犼犻狀犵 100071)5)(犘犲狅狆犾犲’狊犔犻犫犲狉犪狋犻狅狀犃狉犿狔狅犳犆犺犻狀犪犖狅.31401,犆犺犪狀犵犮犺狌狀 130022)犃犫狊狋狉犪犮狋 Unmannedaerialvehicle(UAV),asapriorbranchofintelligentunmannedsystem,hasattractedawiderangeofinterestfromdifferentkindsofapplicationdomains,includingreal timemonitoring,providingwirelesscoverage,remotesensing,searchandrescue,deliveryofgoods,securityandsurveillance,precisionagriculture,andcivilinfrastructureinspectionetc.However,thereareseveralnewchallengesarisingfrommoreandmorecomplexapplicationenvironmentsandscenes,whichsettingahigherdemandfortheextensiblecapacityofUAV,especiallyforsomepropertiesofUAVsuchassmallsize,lightweight,enduringenergy,processingcapability,signaltransmissionrangeandsoon.ThelimitedprocessingpowerandpayloadofUAVarethemostchallengingissues,whichrestraintheon boardrequirementslikesensorweight,sizeandrequiredpower.Asaresult,itisdifficultforUAVtocarryonplentyofinstrumentsandequipmentsandhardwireprocessors,whichimposesdramaticalrestrictionsontheexchangeandshareofresourcesbetweenUAV,andonthecapabilityofUAVtoexecutediversetasksliketrackingmultipleobjects,explorationofcomplexterrainandsoon.Toaddresstheproblemsmentionedabove,manysolutionshavebeenpromoted,ofwhichonemainstreamonAIdevelopmentistomakemulti UAVsflyinginsomeformationandcompletingjobsintheformofintelligentcooperation,whilebreakingthroughtheintrinsiclimitationsofindividualUAVinpayload,enduringenergy,computingandmemorypower.However,theexistedsystemsofmulti UAVslackofcollaborationhavebeenfacedupwithsuchproblemsastheconfineddistanceofwirelesscommunicationandseparationofkindsofdatasources.Inaddition,thecooperativecontrolonmulti UAVsishardtorealizebecauseoftheinstabilityofnetworkconnectionaswellasthelatencyofdatatransmission.Inlightofthedeficiencyofsynergyofmulti UAVs,thispaperproposesacloud basedcontrolsystemarchitectureformulti UAVscooperativeflight(shortforUAV3CA).ThemainideaofUAV3CAistoconfiguratea“remotebrain”formulti UAVsbasedontheconstructionofcloud,equallymeaningthatbyvirtueoftheabstractionandencapsulationoftheresourcesfromUAVsoronboardofUAVsbasedonPaaS(platformasaservice),theinformationanddataamongmulti UAVsareabletoshareinrealtime.Foranotherthing,thepowerfulstorageandcomputingabilityofthecloudputitintorealitythatenablingthemulti UAVstoplaninaunifiedmannerandcontrollingthecooperativeflightofmulti UAVs.Abundantexperimentalresultsfromtwodifferdesignedaspects,ofthatoneforsingletonUAVguidanceandtheotherformulti UAVscooperation,demonstratetheexcellentperformancesofthepresentedUAV3CA,whichareconcretelyshownasthenetworkcommunicationbecomingstablewithoutinterruption,thedatatransmissionreachingoneanotheramongmulti UAVssystemintime,andachievingthevalidcooperativecontrolonmulti UAVsbymeansoftheresourcessharedoncloud.Intheend,theperfectdisplayofformationevolutionoffiveunmannedaerialvehiclesinthevirtualenvironmenthasaccountedfortheflexibilityandmultiformityofcooperativecontrolpatternsofmulti UAVsbasedontheproposedUAV3CA.犓犲狔狑狅狉犱狊 multi UAVs;cloud basedsystemarchitecture;cooperativeflightcontrol;real timesharing1 引 言智能无人系统是人工智能(AI)领域的重要应用之一,其按照适用场景的不同分为无人车、无人机、空间机器人、海洋机器人、无人工厂机器人等不同类别[1],其中以无人机(UnmannedAerialVehicle,UAV)的应用最为典型且广泛.作为一种新兴产业和最具发展前景的AI技术,无人机不仅潜移默化的改变着人们的生活模式,还将在未来的产业或商业乃至民用、军事领域引发一场革命性变革.无人机因其具有成本低、全天候、零伤亡等优势,不仅能够取代人完成简单的重复性劳动,如边境巡逻、精准农业、货物运送、道路交通实时监管等,还能够在复杂环境或危险场景中替代人完成特殊难度的任务,如遥测遥感、建筑与公共设施巡检、事故灾害现场勘测及救援等[2].但随着应用需求的不断扩展,实时多变、纷繁复杂的任务场景对无人机提出了更多更高的要求和挑战.面对单无人机有效载荷低、数据信息整合能力有限等情形,多无人机集群化、协同化、智能化成为无人机技术发展的一种必然趋势.体积小,重量轻是无人机的优势,但同时制约着无人机自身有效的载荷能力,使之难以承载过多的仪器设备和硬件处理器.目前,已有的无人机操控系统主要是以无线局域网或WiFi作为传输媒介,通过遥控器或者软件APP建立端到端的连接并施加控制,其最大的局限性是通信距离受限、可操作性不强,且不支持多架无人机同时接入同一个操控端局.因此,如何突破上述瓶颈成为亟待解决的问题.扩展无人机的体积以增加其有效载荷及存储计算能力或许是一种方法.但如果将多架无人机组成一个集群,使之协同飞行并执行任务,其将具备单无人机无353212期史殿习等:面向多无人机协同飞行控制的云系统架构可比拟的优势.正如Humboldt等人[3]所言,利用有限的资源创造无限的价值(makeinfiniteuseoffinitemeans),大量低成本的无人机通过有机的组合,会产生群体智能效应,这将极大地推进无人机潜在的应用能力.多无人机协同技术的研究未来可用于多个领域,其控制系统架构具有广阔的应用前景,并将在国民经济中产生巨大的经济效益.无线网络的飞速发展和物联网(InternetofThings,IoT[4])的广泛推崇,使得研究人员将云计算的概念引入无人机领域,形成“云+无人机”的概念.追溯到20世纪90年代,东京大学Inaba[5]提出了远程大脑的概念,即提议将机器人与计算机通过万维网连接———发展“网络机器人”.这一概念实现的典型案例是Goldberg等人[6]通过Internet浏览器远程控制网络中的机器人;随后,Kim等人[7]采用UDP协议连接无线传感器和群体机器人实现基于网络连接的控制.网络机器人仅仅是通过网络连接实现多机器人的简单相加,并没有从根本上解决机器人的物理瓶颈问题.在2010年的Humanoids大会上,卡耐基梅隆大学的Kuffner博士[8]首次提出“云机器人”的概念,即机器人可利用互联网上的云服务器进行分布式并行计算和大数据存储、分析与处理,机器人本身无需能力扩展,若想获取信息,连接服务器即可.基于这一概念,很多研究尝试将繁复的计算卸载到云端来解决机器人自身存储计算能力受限的问题.Arumugam等人[9]在Hadoop[10]集群上采用Map/Reduce[11]计算框架来增强机器人算法执行的有效性,但该方法没有给出可靠的通信机制.Hunziker等人[12]设计了一个开源的平台即服务机器人应用框架Rapyuta,提供了一种安全的可定制化的计算环境以帮助机器人将繁重的计算任务转移到云端.上述两种方法仅专注于解决机器人计算层级的问题,协同控制的讨论没有深入.Kuriki等人[13]基于c共识协议提出了一种具有避碰能力的协同编队控制结构,其核心关注点在于如何解决多无人机间的避碰问题.随着无人机角色在机器人领域的不断增强,人们开始将无人机部署到云端.Gharibi等人[14]基于IoT(InternetofThings[4])提出了IoD(InternetofDrones)的概念模型并规划了一个设计框架.Koub a等人[15]提出了一个软件架构DroneMapPlanner(DMP),通过具体的实现和实验证明了IoD,即基于互联网的无人机云处理架构,但该方法一次仅支持访问控制一架无人机.Lin等人[16]提出将无人机连接到GoogleEarth云服务,并将数据存储于MySQL数据库中,用户通过Web浏览器可访问数据库中的无人机信息,该方法没有阐明多无人机控制问题,且通过数据库监控无人机将影响系统的实时响应能力.Sanchez Lopez等人[17]提出了一种在复杂环境中构建自主无人机系统的控制架构Aerostack,Aerostack具有管理大量无人机的能力,但没能实现多无人机间的全局调控.Sampedro等人[18]设计了一个全局协调器GlobalMissionPlanner(GMP),弥补了Aerostack无法协调多无人机执行任务的缺陷,其可动态地将任务分配给每架无人机,同时监控无人机集群行为,但与负责上层任务分配的本地协调器AgentMissionPlanner(AMP)的异步通信却制约着整个系统的实时性.Dong等人[19]提出了一种基于局部邻域信息的多无人机编队控制协议,研究多旋翼无人机系统的编队 围堵控制理论,但控制平台是基于局部拓扑结构实现的,缺乏多无人机系统的全局信息.Zhao等人[20]探讨了无人机通信与控制一体化的通道跟踪、协同通信、自定位、无缝覆盖、轨迹设计、资源配置等技术问题,仅从通信的视角分析了多无人机控制所面临的挑战和机遇.Pham等人[21]通过一个基于分布式控制的多无人机集群,可在野火蔓延的情况下协同跟踪动态环境,但系统需要预规划编辑,灵活性一般.Zou等人[22]针对无人机编队队形变换问题设计的协同控制方法,其网络通信拓扑是弱连接的,数据交互会出现延时现象.Yu等人[23]研究了多无人机在执行器故障和输入饱和条件下的分布式容错控制问题,采用图论和滑模观测器SlidingModeObserver(SMO)相结合的方法增强了系统的可靠性,但忽略了无人机间信息共享的实时性等问题.一些无人机的开源控制平台如QGroundControl①和DJIFlightHub②等,虽然都支持基本的飞行控制功能,但系统启用的飞行模式单一,且不具备通用性.CoUAV是由Wu等人[24]面向多无人机协作设计的一个通用控制监控平台,CoUAV基于Linux核作为中间件实现与无人机的交互,虽然屏蔽了机组硬件上的差异,但无云架构支撑,通用性不强且服务应用范围有限.综上所述,基于云架构实现多无人机的数据共享和协同控制是扩展无人机应用场景、提升动态环境任务需求的有效方法,但系统集成对网络通信的实时性和稳定性以及控制协同的有效性均提出了新的挑战及要求.多无人机联合旨在“1+1>2”,实现多无人机协同飞行控制的目标拟解决以下几个关键问题:(1)多无人机协同控制的有效性;(2)多源异构数据的高4532计 算 机 学 报2020年①②QGroundControl.http://qgroundcontrol.com/DJIFlightHub.https://www.dji.com/flighthub效存储、处理及信息共享;(3)通信链路的稳定性及数据响应的实时性.针对上述问题和已有研究存在的不足如数据实时处理能力差、计算资源匮乏、无人机间数据分离、难以实施全局协同调度等,本文提出了面向多无人机协同飞行控制的云系统架构(Multi UAVOrientedCooperativeControlSystemArchitectureBasedonCloud,UAV3CA),其原理是通过云服务器连接无人机,并在平台即服务(Platform as a Service,PaaS[25])层将无人机资源封装并提供公开接口;云控制端根据预执行的任务对无人机进行分组并做有机组合,通过远程过程调用(RemoteProcedureCall,RPC)获取无人机及其传感器上的数据,并将数据卸载到云端做高效存储,实现多无人机间数据的交互及共享;云计算节点作为无人机集群的远程CPU,运用其强大的计算能力对无人机回传的数据进行处理,生成控制命令并将其发送到无人机上完成远程控制,实现对多无人机的联合部署、飞行调度以及通力协作.图1 UAV3CA的系统架构图2 面向多无人机协同飞行控制的云系统架构多无人机协同飞行是未来机器人在人工智能领域发展的必然趋势.通过将多架低成本的无人机组合并部署到云端,可弥补单无人机因体积小、续航时间短等自身条件限制所带来的能力不足及缺陷,使得无人机集群具备单无人机硬件无法超越的计算、存储及处理能力.传统的无人机集群技术难以满足日趋复杂的任务场景需求,如(1)稳定的通信链路以支持数据实时传输,(2)状态数据和感知信息强大的存储、计算能力,(3)全局最优解的决策生成及命令部署,(4)系统控制的协同性、智能性、灵活性等.鉴于此,本文提出一种面向多无人机协同飞行控制的云系统架构UAV3CA,为无人机协作应用创建一个开发原型系统.UAV3CA采用互联网将无人机与云及云控制端连接,实现多无人机之间的超视距连接.基于基础通信链路,无人机将承载的传感器数据和自身的状态信息同步到云端,而云控制端根据目标任务间接驱动无人机协同飞行.作为无人机与控制端的中间桥梁,云端一方面对无人机卸载下来的感知数据进行处理,并公开且共享无人机上的状态信息;另一方面按照控制端的要求进行数据分析,将生成的控制命令经封装后传递给无人机的飞控系统.图1所示为UAV3CA的系统架构图,下面将详细阐述系统553212期史殿习等:面向多无人机协同飞行控制的云系统架构架构的组成部分及软件功能的具体实现.UAV3CA系统架构主要由无人机执行层、云端层和操控层组成,针对不同的层级和功能需求,本文采用模块化松散耦合的方式,设计了三个软件功能逻辑节点———无人机节点、云控制节点和协同控制节点.下面进行详细介绍.2 1 无人机执行层无人机是系统最终的交互目标,其代表一组资源,可向外部应用提供服务.硬件层上,本文通过开源机器人操作系统ROS[26]的一些标准服务如硬件抽象、进程间消息传递等,将无人机资源对外服务化;通过另一种资源抽象方式———微型飞行器轻量级消息编组库MAVLink①的不同传输方式如TCP、UDP、USB等,使无人机与地面控制站交换预定义消息.为减少因重复性操作造成的资源浪费,降低系统开发的经济成本,缩短开发周期,本文基于Gazebo运行模拟环境场景,并通过PC机上SITL②模拟器模拟仿真无人机.仿真无人机上载有飞行控制器程序ArduPilot③,与飞行控制相关的状态信息和环境感知数据可从仿真无人机的飞行动力学模型中模拟收集,未来用于系统框架模型的仿真实验测试.软件层上,无人机被抽象为一个逻辑节点.首先通过ROS的发布/订阅机制和软件包MAVROS[26]的解析封装功能,向无人机发送MAVLink消息,为开发人员提供高级接口.其次基于ROSBridge[27]软件包,开发人员可在非ROS系统和ROS系统之间进行交互式通信,本文在操控层(非ROS系统,参见2.3节内容)上采用Websocket④协议格式发送数据,并由ROSBridge进行转换发送给相关的ROS主题;反之,从ROS主题获取的无人机上数据经ROSBridge转换回传到操控层.另外,无人机节点还包含飞行控制模块和数据感知采集模块两个部分.飞行控制模块用于控制无人机的基本动作,通过解析ROS发来的MAVLink指令消息包,将生成的预期飞行动作与无人机当前的姿态和位置进行比较,并经飞行控制算法计算出无人机的运动偏移量,制导无人机飞行.数据感知采集模块,用于收集无人机上的数据,其中包括无人机的硬件信息、客户端验证数据信息、无人机状态同步信息以及传感器采集信息等.基于ROS的消息发布/订阅机制和ROSBridge工具的代理转发,数据感知采集模块可与云控制节点(参见2.2节内容)的数据感知接收模块进行数据交互.2 2 云端层云端层是UAV3CA系统架构设计的重点,是操控层与无人机执行层间连接控制的桥梁,具有无人机远程“CPU”之美誉,是多无人机协同飞行的核心运行层.为了实现各组件间的松散耦合且功能需求可扩展,本设计将云端层细化为两个部分,即无人机影射层和云核心层,另外在软件层上抽象一个逻辑节点———云控制节点.2.2.1 无人机影射层无人机影射层旨在将无人机抽象为云端资源,为开发者提供完全独立于无人机具体特征的操作方法.无人机影射层在物理无人机和云之间起桥接作用,一方面将无人机状态及感知数据转移到云端进行处理,另一方面将云端计算、分析的结果发送给无人机作任务调度.无人机影射层包含以下两个基本组件:(1)无人机接入组件,亦称为底层通信模块.无人机可选择多种网络协议与控制端交互数据,但为了避免云端部署ROS时发生中心节点Master过载的宕机现象,本文在云端(非ROS端)采用ROSBridge与无人机(ROS端)发送消息,对应于无人机执行层建立Websocket协议通信.当无人机申请接入到云服务器时,首先需要经过身份验证.身份一旦验证成功,云服务器将通过线程池与无人机保持连接,且为有效处理不同格式的数据和指令信息,通信模块被设计为多线程服务模式.UAV3CA设计是面向多无人机和多控制端服务的,访问请求必然会存在冲突.为避免此类现象发生,本文将在控制端与无人机之间设置一定的匹配权限,即先对无人机进行分组,然后在控制端设置不同的组权限来分层管理无人机信息,实现对无人机资源的有效管理.假设存在一种情形,即某一时刻有多个用户同时访问一架无人机,由于当前请求频繁且即时并发数据量过大,网络空间通信链路会因带宽资源有限而发生过载.为此,系统设计嵌入了一个网络分发器,将系统多源请求数据进行存储转发,并采取网络代理的方式把MAVLink消息和ROSBridge消息广播到其它端口.(2)无人机抽象组件,是对无人机及其上资源,6532计 算 机 学 报2020年①②③④MAVLink.http://qgroundcontrol.org/mavlink/startSITLsimulator(softwareintheloop)ArduPilotautopilotsuite.http://ardupilot.com/TheWebsocketProtocol.https://tools.ietf.org/html/rfc6455包含与无人机相关的信息以及可执行的操作,进行抽象并封装,具体包含:①远程控制器.封装为可在无人机上执行的所有MAVLink命令消息以及和与ROS主题相关的无人机动作指令,如起飞、降落、悬停、前进、拍照等;②任务控制器.以协助无人机自主完成任务,其可以运行单个任务,也可依时间轴运行一系列连续的任务;③传感器管理器.用统一的方式集中管理传感器信息,以解决因无人机异质性、传感器多样性而产生的数据不一致性,以及ROS中基于不同主题发布消息而产生的交互性冲突;④无人机影射文件.通过一个JSON格式的文件反映物理世界中无人机的形态.2.2.2 云核心层云核心层是UAV3CA系统框架的核心,具体包含以下组件:(1)数据存储工具组件,为来自无人机的各种数据提供存储服务.无人机系统中需要存储、检索和访问不同类型的数据,且根据数据类型、结构及应用需求的不同采用不同的数据库.如SQL数据库存储位置坐标、三维速度、姿态欧拉角、方向、环境温度等结构化数据;NoSQL数据库存储无人机设备信息、认证信息、图像及视频等非结构化数据;对于及时响应的指令数据,系统采用近实时处理的Storm流,而对于实时性要求不高的大容量数据,系统在Hadoop[10]框架上使用HDFS[28]文件系统读取数据,并采用分布式编程模型Map/Reduce[11]对数据进行并行处理.(2)虚拟环境组件.虚拟技术已经成为构建服务器集群的重要手段.本文选择Docker[29]和Kubernetes[29]进行集中式服务器的管理和调度,其中Docker负责提供虚拟容器运行时环境,Kubernetes负责管理、编排和调度由Docker引擎构建的容器,对服务器集群进行资源整合和调度.(3)智能引擎组件.无人机在任务执行的过程中需要智能算法的支持,如任务匹配、路径规划、动态调度等.智能引擎组件基于Hadoop集群、采用分布式计算框架Map/Reduce实现对大规模数据的并行计算和分析.这种远程“大脑”的控制模式,可支撑多无人机系统智能协同运行.2.2.3 云控制节点云控制节点上装有Ubuntu操作系统,但不部署ROS,以规避Master的中心节点效应.为实现对多无人机的协同控制,云控制节点设计了多个功能服务模块.(1)数据感知接收模块.使用消息发布/订阅机制从数据感知采集模块中订阅与主题相关的数据信息,并依类型的不同对数据作分发处理,如将入网验证信息转发至认证管理模块,状态数据转发至状态同步模块,传感器数据转发至误差检测模块.(2)认证管理模块.接收来自数据感知接收模块的无人机IP地址以及用于认证的密钥Key,通过和系统内置约定的安全验证码进行比对匹配来确定请求入网的无人机是否合法.(3)状态同步模块.为无人机协同控制提供实时且稳定的无人机状态数据.通过Timing机制定期从数据感知接收模块中获取无人机的状态数据,同时对无人机的特定状态进行实时监听,以保持无人机影射文件内容与物理无人机真实状态的同步性.(4)误差检测模块.将从数据感知接收模块中获取的传感器数据与预期目标指令进行对比,鉴定无人机是否成功接收到命令、是否成功执行命令且达到预期目标.MAVLink协议本身没有反馈机制,因此,对于控制端的即时命令,系统每发出一次DO命令,误差检测模块就检测一次无人机状态,通过反复发送、反复检测,直至确认无人机执行该DO命令为止.而对于过程执行命令,系统不作强精度要求,仅预设误差容限范围,即通过反复计算和调整无人机当前状态和预期目标的差值,使其降至误差容限范围内来表明命令执行成功.(5)基于影射文件的命令控制模块.影射文件在认证管理模块认证成功且分组编成后生成,是存储在云服务器上物理无人机的数字孪生,反映物理世界中无人机实时状态(如飞行模式、当前位置等)的JSON格式文件,可视为虚拟无人机.影射文件将发送给无人机的命令执行序列按时间戳顺序先缓存再发送.物理无人机和虚拟无人机通过状态同步模块推送同步状态信息,即无人机将实时状态上传至影射文件,控制端通过影射文件将期望的状态指令发送给无人机.基于影射文件的命令控制模块不仅可以克服因网络不稳定性而导致的无人机频繁上线、掉线现象以及控制命令的时间顺序误差,而且其内置的存储转发机制可以减轻由多个控制节点向同一架无人机重复请求访问而引发的网络负载过压问题.(6)坐标转换模块.是将一个参考系下的坐标点转换为另一个参考系下的坐标点,以统一系统内部的控制调用接口.(7)服务提供模块.是对无人机及其上资源封753212期史殿习等:面向多无人机协同飞行控制的云系统架构装并向外部提供统一风格接口的服务.其通过面向资源的接口设计提供三种类型的服务:无人机自身状态数据UAVInfo,如方向、速度等;可提供资源服务UAVService,如传感器数据、雷达数据等;执行动作参数UAVAction,如运动轨迹改变参数等.2 3 操控层操控层建立在云端层之上,云核心层给予操控层强大的数据计算与分析能力支撑;当有任务下达,操控层生成决策部署,并通过云端层间接控制多无人机协同飞行.操控层为无人机飞控程序提供了两种类型的接口:Websocket和Webservice,通过这两种接口,操控层可以同时访问多个无人机,或基于云端层提供的服务为无人机设置参数并执行协同飞行算法.Websocket是一种全双工通信协议,一方面允许无人机主动向客户端同步信息,另一方面允许操控层通过云端向无人机推送指令.ROSBridge包中的ROSJS库同样支持Websocket.当无人机执行层MAVLink消息包进入云端层时,将首先通过套接字被接收,然后由网络分发器经Websocket发送到操控层.Webservice接口用于开发实时控制、任务控制、无人机管理以及其他非连续数据流等应用.协同控制节点是建立在操控层上的可公开调用无人机资源的节点,基于云控制节点中的功能模块,即通过统一接口封装屏蔽不同无人机的异质性,降低传感器数据的异构性,无人机之间可实现数据的交互与共享.基于操控层上的Web[30]协议,协同控制节点通过HTTP接口向外部提供无人机的资源和服务,如通过HTTPGET方式获取无人机上的资源;通过HTTPPOST方式请求服务;通过HTTPPUT方式更新无人机的ID信息;通过HTTPDELETE方式中止无人机执行当前任务或移除任务.基于资源公开和数据共享,协同控制节点可面向具体的任务需求,调用一定的智能算法对在线的多架无人机进行匹配、分组和调度,使之协同飞行并完成期望目标任务.综上所述,UAV3CA设计完成了一个面向多无人机协同飞行控制的云系统框架,其从通信链路建设开始,到基础设施和功能组件服务模块的中间件设计,从底层抽象到面向应用,最终在控制端实现了对多无人机终端的远程协同飞行控制.3 系统框架设计的关键技术机制多无人机协同控制是建立在无人机到云端的可靠连接之上,基于连接,先将无人机上的数据卸载到云端,通过云核心层对多源异构数据进行处理、存储、计算和分析,并将生成的指令回传至无人机实施控制.而设计的核心控制层将来自不同无人机上的数据信息进行交互共享,参考任务作统一规划、调度,控制多无人机协同飞行,共同完成目标.因此,面向多无人机协同飞行控制的云系统架构UAV3CA提出了三种嵌入式关键技术机制:(1)基于ROS发布订阅的无人机连接机制;(2)基于MAVLink协议的无人机控制机制;(3)基于RESTful[31]架构的无人机数据共享机制.下面详细阐述这三种关键机制.3 1 基于犚犗犛发布订阅的无人机连接机制无人机上装载ROS[26],一方面可重用开源的项目库,另一方面还可为硬件资源提供软件抽象.目前,ROS已广泛应用于机器人的程序开发,但却缺乏通过互联网来远程控制和监控机器人的原生支持.因此,本文在ROS发布/订阅的机制上通过引入ROSBridge和代理服务器的方法,提出一种新的无人机连接机制,以支持UAV3CA框架能够快速创建无人机实例,安全可靠的连接无人机与云端,对无人机进行硬件级别的认证,并基于策略的授权,使控制端对特定主题拥有读写权限,以保证安全.3.1.1 基于ROSBridge的去中心化方法ROS是一个分布式系统,其将机上每一个应用程序表征为一个节点(Node),节点之间采用基于主题(Topic)的发布(Publish)和订阅(Subscribe)机制来实现消息传递,不同的ROS程序间通过RPC(RemoteProcedureCall)方式建立通信并传输数据.为了简单,云端可选择部署ROS,但分布式ROS系统管理是一种基于Master主节点的“集中式”管理模式,如果将云端设置为Master主节点,且运行在Internet上具有公共IP地址的服务器上,进而通过基于发布/订阅主题和服务的方式实现无人机和云端以及无人机之间的通信访问来维护网络中所有其他节点的信息,必将导致整个网络强烈依赖于中心节点Master,极大地影响系统的实时性和稳定性,具体表现为:(1)当多个无人机同时申请接入网络时,主节点Master会因负载过高而导致崩溃,影响整个系统的运行并且难以恢复;(2)当网络系统中存在大量主题和数据时,本地数据传输会产生延迟,远程数据传输会因网络带宽和处理能力而受限.因此,为保证无人机远程控制的稳定性,本文设计采用一种基于ROSBridge的去中心化方法来实现无8532计 算 机 学 报2020年。
26262术语定义 架构 解释

26262术语定义架构解释
架构是指在设计和构建任何复杂系统时所采用的结构和组织方式。
在计算机领域中,架构通常指软件系统或计算机系统的整体结构,包括各个组件之间的关系、数据流和通信方式等。
架构设计的
目标是确保系统的稳定性、可靠性、可扩展性和易维护性。
在软件开发中,架构涉及到如何组织代码、模块化设计、数据
存储和处理、用户界面设计等方面。
常见的软件架构包括客户端-服
务器架构、分层架构、微服务架构等。
每种架构都有其特定的优势
和适用场景,开发人员需要根据项目需求选择合适的架构。
在计算机系统中,架构还可以指硬件系统的设计,包括处理器
架构、内存架构、总线结构等。
不同的架构对系统的性能、功耗和
成本等方面有着重要影响,因此在硬件设计中也需要精心考虑架构
的选择和优化。
总之,架构是指系统整体的设计和组织方式,涉及到软件系统、计算机系统以及其他复杂系统的各个方面。
一个良好的架构能够为
系统的稳定性和可维护性提供有力支持,因此在任何系统设计和开
发过程中都具有重要意义。
桌面应用Web化——应用接入架构

桌面应用Web化——应用接入架构
李雅;李昌华
【期刊名称】《现代电子技术》
【年(卷),期】2008(31)20
【摘要】C/S架构和B/S架构是大家都比较熟知的两种架构,目前,利用这两项技术所开发出的产品也很多,但是在定位产品所采用的架构问题上,这两种架构的优缺点却让人们难以取舍.因此,针对这一现象提出一种全新的应用接入架构.此架构能够很好地把C/S架构和B/S架构各自的优点有机的结合起来,形成一个多层体系结构,即不需要修改应用程序代码,就可以通过Web直接访问传统的桌面应用(即C/S应用),是一种新型应用部署和访问技术.同时,此架构还解决了在低带宽条件下的各种应用软件的远程访问速度问题.
【总页数】5页(P82-85,88)
【作者】李雅;李昌华
【作者单位】西安建筑科技大学信息与控制工程学院,陕西,西安,710055;西安建筑科技大学信息与控制工程学院,陕西,西安,710055
【正文语种】中文
【中图分类】TP393.02
【相关文献】
1.云架构下的虚拟化桌面应用 [J], 李世新
2.校园云架构下的虚拟化桌面应用 [J], 王晓庆
3.基于Web架构的智能变电站SCD图形化研究及应用 [J], 王鹏举;钱海;吴兴林;卢盛阳;孙谋成
4.一种基于OSGi的Web应用模块化架构设计 [J], 刘丹;王宇飞;杨宁
5.基于Angular2的模块化Web应用架构设计 [J], 翁湦元;单杏花;朱建军;王雪峰因版权原因,仅展示原文概要,查看原文内容请购买。
Windows程序的基本框架和消息机制
Windows程序的基本框架和消息机制
张安琳;黄道颖;李潢琦
【期刊名称】《电脑开发与应用》
【年(卷),期】2001(014)008
【摘要】通过对一个Windows基本程序的分析,介绍了Windows程序的基本框架和消息机制,说明了在VB、Delphi等可视化编程环境下,实现了对上述机制的封装.讨论了利用Windows消息驱动体系,对消息处理进行编程,让系统实现一些特殊的应用功能.
【总页数】3页(P26-27,30)
【作者】张安琳;黄道颖;李潢琦
【作者单位】郑州轻工业学院,郑州,450000;郑州轻工业学院,郑州,450000;北方自动控制技术研究所,太原,030006
【正文语种】中文
【中图分类】TP3
【相关文献】
1.基于Windows消息机制的MSC.Patran集成方法研究 [J], 宋文龙;魏平;赵寒
2.基于DLL的数据共享技术和Windows消息机制在摩托车整车检测系统中的应用 [J], 王亚晓;劳奇成
3.Windows消息机制及其辅助研究工具设计 [J], 黄娟;张育瑛
4.深入.NET控件开发——System.Windows.Forms中的Windows窗口消息
机制 [J], 唐泉
5.在Windows消息机制下的应用程序远程监测系统 [J], 杨尊程;蒋泽军;王丽芳因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
物理位置 乌鲁木齐
到货日期或计划到货日 期
哪个部门负责 区信息技术部
物理位置 乌鲁木齐
区信息技术部
乌鲁木齐
型号
数量
配置情况
运行内存 1 6CPU(1)
示例 cbps
是
网络设备
编号
1 2
网络设备类型 厂商名称
型号
数量
配置情况
路由器 交换机
cisco cisco
3662 catalyst 6506
1
5块NM-4T卡
2个48口RJ-45卡
1个8口E1卡 1
1
个MSFC卡
有效性
可扩展性 是否计划升 级
好
是
示例
好
否
可扩展性
好 好
是否计划升级 到货日期或计划到 哪个部门负责 货日期
物理位置
否
2003年5月10日 区信息技术部 乌鲁木齐
否
2003年10月10日 区信息技术部 乌鲁木齐
可扩展性 好
是否计划升级 到货日期或计划到 哪个部门负责 货日期
否
区信息技术部
请填写2003 年4月以后
存储及备份
编号
存储类型 (DAS,SAN,NAS
)
1
xp128
2
xp128
3
4
厂商名称
HP HP
基
型号
数量
配置情况
运行的应用 关键业务? 运行情况
6G CACHE 1G
1
内存
6G CACHE 1G
1
内存
示例 cbps
是
cbps
是
运行良好 还未到货
服务器设备
编号
服务器类型 厂商名称