松下伺服发生故障报警代码一览和对策
松下伺服发生故障报警代码一览及对策

2011-07-11 17:4498 0自诊断异常 控制回路因噪声过大等产生误动作; 驱动器的自诊断功能由于驱动器内部出错被激活; 暂时切断电源后,重新投入电源;如仍然出现错误显示,则可能发生故障;请停止使用,更换电机,驱动器;返送销售代理店检查修理; 99 0其它异常 控制回路因噪声过大等产生误动作; 驱动器的自诊断功能由于驱动器内部出错被激活; 暂时切断电源后,重新投入电源;如仍然出现错误显示,则可能发生故障;请停止使用,更换电机,驱动器;返送销售代理店检查修理;| |2011-07-11 17:43 报警错误代码 辅助码保护功能原因对策51 0 光栅尺状态0异常保护 光栅尺错误码ALMC 的0位码变为1;请检查光栅尺的规格;排除异常原因后,通过前面板消除光栅尺的错误; 然后请切断控制电源,重启; 51 1 光栅尺状态1异常保护 光栅尺错误码ALMC 的1位码变为1;请检查光栅尺的规格;排除异常原因后,通过前面板消除光栅尺的错误; 然后请切断控制电源,重启; 51 2 光栅尺状态2异常保护 光栅尺错误码ALMC 的2位码变为1;请检查光栅尺的规格;排除异常原因后,通过前面板消除光栅尺的错误; 然后请切断控制电源,重启; 51 3 光栅尺状态3异常保护 光栅尺错误码ALMC 的3位码变为1;请检查光栅尺的规格;排除异常原因后,通过前面板消除光栅尺的错误; 然后请切断控制电源,重启; 51 4 光栅尺状态4异常保护 光栅尺错误码ALMC 的4位码变为1;请检查光栅尺的规格;排除异常原因后,通过前面板消除光栅尺的错误; 然后请切断控制电源,重启;76 0 内置RAM 异常控制回路因噪声过大等产生误动作; 驱动器的自诊断功能由于驱动器内部出错被激活; 暂时切断电源后,重新投入电源;如仍然出现错误显示,则可能发生故障;请停止使用,更换电机,驱动器;返送销售代理店检查修理; 76 1 内置ROM 异常控制回路因噪声过大等产生误动作; 驱动器的自诊断功能由于驱动器内部出错被激活; 暂时切断电源后,重新投入电源;如仍然出现错误显示,则可能发生故障;请停止使用,更换电机,驱动器;返送销售代理店检查修理; 77 0 栈存储空间异常控制回路因噪声过大等产生误动作; 驱动器的自诊断功能由于驱动器内部出错被激活; 暂时切断电源后,重新投入电源;如仍然出现错误显示,则可能发生故障;请停止使用,更换电机,驱动器;返送销售代理店检查修理; 78 0编码器EEPROM 校验异常 控制回路因噪声过大等产生误动作; 驱动器的自诊断功能由于驱动器内部出错被激活; 暂时切断电源后,重新投入电源;如仍然出现错误显示,则可能发生故障;请停止使用,更换电机,驱动器;返送销售代理店检查修理;| |2011-07-11 17:41报警错误代码 辅助码保护功能原因对策41 0绝对式计数器溢出异常保护编码器多周计数器超过规定值;正确设定绝对式编码器设定数值;调整机械原点的移动量在32767转以内; 42 0 绝对式编码器超速异编码器在停电时,由蓄电池电源供电时,电机转速超过规定值;确认编码器的电源电压5V ±5%;保护 时须特别注意;虽然连接光栅尺的电缆连接完好,但通信数据异常;如果电机电缆与连接光栅尺的电缆捆扎在一起,请分开布线;将屏蔽线接入FG …请参照光栅尺的连接图;50 2 光栅尺通信数据异常保护外部光栅出和驱动器的通信数据不正确;按连接图连接光栅尺的连线,纠正连接器插头的连接错误;| |2011-07-11 17:38 报警错误代码 辅助码保护功能原因对策33 0 I/F 输入重复分配异常1保护 输入信号SI1,SI2,SI3,SI4,SI5的功能分配有重复设定;请正确设定针对连接器引线的功能分配;33 1 I/F 输入重复分配异常2保护 输入信号SI6,SI7,SI8,SI9,SI10的功能分配有重复设定;请正确设定针对连接器引线的功能分配;33 2I/F 输入功能号码异常1 输入信号SI1,SI2,SI3,SI4,SI5的有在功能分配中未定义编号;请正确设定针对连接器引线的功能分配;33 3I/F 输入功能号码异常2 输入信号SI6,SI7,SI8,SI9,SI10的有在功能分配中未定义编号;请正确设定针对连接器引线的功能分配;33 4I/F 输出功能号码异常1 输出信号SO1,SO2,SO3的有在功能分配中未定义编号; 请正确设定针对连接器引线的功能分配; 33 5 I/F 输出功能号码异输出信号SO4,SO5,SO6的有在功能分配中未定义编号; 请正确设定针对连接器引线的功能分配;38 0 禁止驱动输入保护驱动禁止输入设定=0时,正方向/负方向驱动禁止输入POT/NOT都为ON;检查连接正方向/负方向禁止驱动输入的开关,电缆,电源有否异常;驱动禁止输入设定=2时,正方向/负方向驱动禁止输入的其中一项为ON;尤其须确认控制用信号电源DC1224V的起动是否滞后;39 0 模拟输入1AI1过大保护输入到模拟指令输入1中的电压超过模拟输入1AI1过电压设定的设定值;正确设定模拟输入1AI1过电压设定;检查连接装X4的连接状态;设定模拟输入1AI1过电压设定=0,使保护功能无效;39 1 模拟输入2AI2过大保护输入到模拟指令输入2中的电压超过模拟输入2AI2过电压设定的设定值;正确设定模拟输入2AI2过电压设定;检查连接装X4的连接状态;设定模拟输入2AI2过电压设定=0,使保护功能无效;39 2 模拟输入3AI3过大保护输入到模拟指令输入3中的电压超过模拟输入3AI3过电压设定的设定值;正确设定模拟输入3AI3过电压设定;检查连接装X4的连接状态;设定模拟输入3AI3过电压设定=0,使保护功能无效;40 0 绝对式系统停机异常保护停止编码器的供电电源,蓄电池电源,内置电容器电压低于规定值;连接蓄电池用电源后,对绝对式编码器进行清零;※发生该出错时,只有对绝对式编码器进行清零,方可清除警报;| |2011-07-11 17:37报警错误代码辅助码保护功能原因对策30 0 安全输入保护 安全输入1或安全输入2中至少一项的输入光电耦合器为OFF;确认安全输入1,2的输入配线状态;| |2011-07-11 17:35 报警错误代码 辅助码保护功能原因对策16 0 过载保护过载保护转矩指令值超过过载等级设置设定的过载水平时,根据后述时限特性激活过载保护; 以PANATERM 的波形图形画面检查转矩电流波形是否发生振荡,是否上下晃动过大;通过PANATERM 检查过载警报显示及负载率;1负载过重,有效转矩超过额定转矩,长时间持续运转;1加大驱动器,电机的容量;延长加减速时间,降低负载;2增益调整不良导致振荡,振动;电机出现振动,异常声音;惯量比的设定值异常;2重新调整增益;3电机布线错误,断线;3按布线图正确连接电机线路;更换电缆;4机械受到碰撞,突然负载变重,发生扭转缠绕; 4排除缠绕因素;减轻负载;5电磁制动器处于动作状态;5测量制动器端子的电压;断开制动器;6在复数台机械布线中,误将电机电缆连接到其它轴,错误布线; 6将电机电缆,编码器连线正确连接到各自的对应轴上;7过载等级设置低;7设定过载等级设置为0;18 0 再生过载保护再生能量超过再生放电电阻的容量;1由于负载惯量大形成减速中的再生能量,导致逆变器电压上升,以及再生放电电阻的能量吸收不足导致异常检测值上升; 1检查运动图形速度监控器;检查再生放电电阻负载率及过再生警告显示;提高电机,驱动器容量,放缓减速时间,降低电机的转速,外附再生放电电阻;2电机转速过高,无法在规定减速时间内完全吸收再生能量; 2检查运转模式速度监视器;检查再生放电电阻负载率及过再生警报显示,提高电机,驱动器容量,延长减速时间;降低电机转速;外置再生放电电阻;3外附电阻动作极限被限制为10%负载率; 3设定再生放电电阻外置选择为2;18 1 再生晶体管异常保护伺服驱动器的再生驱动用晶体管故障;更换驱动器; 21 0编码器通讯断线异常保护 编码器和驱动器的通信,在达到一定次数后中断,激活断线检测功能; 接线图所示正确连接编码器线路;纠正连接器插头的错误连线;21 1 编码器通信异常保护 主要因噪音引起的数据异常;虽与编码器连接,但通信数据异常;确保编码器电源电压为DC5V ±5%;尤其在编码器线缆较长时需特别注意; 如果电机电缆与编码器线捆扎在一起,请分开布线;将屏蔽线接入FG;23 0编码器通信数据异常保护 编码器的数据通讯无异常,但数据内容异常;编码器的数据通信异常; 确保编码器电源电压为DC5V ±5%;尤其在编码器线缆较长时需特别注意;主要因噪音引起的数据异常;虽与编码器连接,但通信数据异常; 如果电机电缆与编码器线捆扎在一起,请分开布线; 将屏蔽线接入FG;| |2011-07-11 17:29现把松下A5系列伺服的故障报警代码整理出来,供使用松下伺服发生故障的朋友们尽快排除故障;A4系列可以参照;这里每篇文章有大小限制,只好拆开发了,慢慢找自己需要的了。
松下伺服发生故障报警代码一览及对策

(2)检查电机电缆连接U,V,W是否短路,连接器导线是否有毛刺等。正确连接电机电缆。
(3)电机电缆接地。
(3)检查电机电缆的U,V,W与电机接地线之间的绝缘电阻。绝缘不良时请更换新电机。
(4)电机烧毁。
(4)检查电机的各条电缆间的电阻是否平衡,如不平衡,则需更换电机。
(5)电机电缆接触不良。
(4)排除缠绕因素。减轻负载。
(5)电磁制动器处于动作状态。
(5)测量制动器端子的电压。断开制动器。
(6)在复数台机械布线中,误将电机电缆连接到其它轴,错误布线。
(6)将电机电缆,编码器连线正确连接到各自的对应轴上。
(7)Pr5.12(过载等级设置)低。
(7)设定Pr5.12(过载等级设置)为0。
18
(8)接通伺服100ms以后,再输入脉冲。
(9)动态制动器电路过热。
(9)请勿用伺服On/Off作为运转、停止使用。高速运转时请设置动态制动器动作的停止时间为3分钟左右。
15
0
过热保护
驱动器散热器,功率元件的温度超过规定值以上。
(1)驱动器的使用温度超过规定值。
(1)降低驱动器使用温度及改善冷却条件。
(2)过载。
(2)提高驱动器,电机的容量。延长加减速时间。降低负载。
报警错误代码
辅助码
保护功能
原因
对策
16
0
过载保护(过载保护)
转矩指令值超过Pr5.12(过载等级设置)设定的过载水平时,根据后述时限特性激活过载保护。
以PANATERM的波形图形画面检查转矩(电流)波形是否发生振荡,是否上下晃动过大。通过PANATERM检查过载警报显示及负载率。
(1)提高电源电压容量。更换电源。排除主电源电磁接触器脱落故障后,再次投入电源。
松下伺服故障报警代码分析及处理

松下伺服故障报警代码分析及处理
一、报警代码
1.F10:输出电流检测点失效:
输出电流检测点是伺服控制器检测电机输出功率的重要指标。
出现这一报警的原因很可能是电机母线上的电流值没有正常检测到,或者控制器内部的电流检测电路出现故障,可能是放大器的结构失效,也可能是A/D 转换器的出错。
2.F11:DC组件过载
DC组件过载的报警指示DC电机运行台架上电机电流过载。
原因可能是电机处于锁死或粘连状态,电机容量不够,电机负载过大,或伺服控制器不正常检测电机负载过重。
3.F12:温度传感器信号异常
温度传感器信号异常报警指出,温度传感器的信号输出不正常。
原因很可能是温度传感器的电路失效,或伺服控制器内部的A/D转换器的电路失效,导致无法正常检测温度数值。
二、处理方法
1.F10报警处理方法
(1)检查电机母线是否处于正常状态,是否有破损或过载现象;
(2)检查控制器内部电机输出功率放大器是否正常;
(3)更换A/D转换器;
(4)重新调整控制器电机控制程序。
2.F11报警处理方法:
(1)检查电机是否出现锁死或粘连的情况;(2)检查电机的容量是否足够;。
松下伺服发生故障报警代码一览及对策

按布线图正确连接编码器线缆。
设定Pr5.13(过速度等级设置)为0。
26
1
第2过速度保护
电机的转速超过Pr6.15(第2过速度等级设置)的设定值。
避免过大速度指令。
检查指令脉冲的输入频率及分频,递增比。
因增益调整不良产生过冲时,请对增益进行调整。
按布线图正确连接编码器线缆。
(3)电机电缆接地。
(3)检查电机电缆的U,V,W与电机接地线之间的绝缘电阻。绝缘不良时请更换新电机。
(4)电机烧毁。
(4)检查电机的各条电缆间的电阻是否平衡,如不平衡,则需更换电机。
(5)电机电缆接触不良。
(5)检查电机连接部U,V,W的连接器插头是否脱落,如果松动,脱落,则应紧固。
(6)由于频繁接通,关闭伺服,导致动态制动器用的继电器熔化。
(4)驱动器故障(回路故障)
(5)更换新的驱动器。
14
0
过电流保护
在逆变器上流动电流超过规定值。
检查电机电缆是否短路等。
(1)驱动器故障(回路,IGBT部件不良)
(1)拆除电机电缆,接通伺服,如果立即发生故障,则需更换新的驱动器。
(2)电机电缆U,V,W短路。
(2)检查电机电缆连接U,V,W是否短路,连接器导线是否有毛刺等。正确连接电机电缆。
正确设定Pr6.15(第2过速度等级设置)数值。
27
0
指令脉冲输入频率异常保护
指令脉冲输入频率数超过Pr5.32(指令脉冲输入最大设定)的设定值×1.2倍。
确认指令脉冲输入。
27
2
指令脉冲倍频异常保护
旋转1次指令脉冲数,用第1〜第4指令分频倍频分子,指令分频倍频分母设定的分频,倍频比不正确。
松下伺服发生故障报警代码一览及对策

辅助码
呵护功能
原因
对策
0
0
正常
正常
正常
11
0
控制电源电压缺乏呵护
控制电源逆变器的P-N间电压低于规定值。
丈量连接器及端子台(L1C,L2C)的线间电压。
(1)电源电压低。发生瞬间停电。
(1)提高电源电压的容量,更换电源。
(2)电源容量缺乏…受接通主电源时的冲击电流影响,电源电压下降。
1
再生晶体管异常呵护
伺服驱动器的再生驱动用晶体管故障。
更换驱动器。
21
0
编码器通讯断线异常呵护
编码器和驱动器的通信,在达到一定次数后中断,激活断线检测功能。
接线图所示正确连接编码器线路。
纠正连接器插头的错误连线。
21
1
编码器通信异常呵护
主要因噪音引起的数据异常。虽与编码器连接,但通信数据异常。
确保编码器电源电压为DC5V±〜5.25V)。尤其在编码器线缆较长时需特别注意。
(3)电机电缆接地。
(3)检查电机电缆的U,V,W与电机接地线之间的绝缘电阻。绝缘不良时请更换新电机。
(4)电机烧毁。
(4)检查电机的各条电缆间的电阻是否平衡,如不服衡,则需更换电机。
(5)电机电缆接触不良。
(5)检查电机连接部U,V,W的连接器插头是否脱落,如果松动,脱落,则应紧固。
(6)由于频繁接通,关闭伺服,导致动态制动器用的继电器熔化。
在起动负载时,检查电机位置(编码器反馈值)的变更与负载位置(光栅尺反馈值)的变更为相同符号。
检查光栅尺分频分子(Pr3.24),分母(Pr3.25),光栅尺方向反转(Pr3.26)是否设定正确。
26
松下伺服发生故障报警代码一览与对策
0
过热保护
驱动器散热器,功率元件的温度超过规定值以上。
(1)驱动器的使用温度超过规定值。
(1)降低驱动器使用温度及改善冷却条件。
(2)过载。
(2)提高驱动器,电机的容量。延长加减速时间。降低负载。
报警错误代码
辅助码
保护功能
原因
对策
16
0
过载保护(过载保护)
转矩指令值超过Pr5.12(过载等级设置)设定的过载水平时,根据后述时限特性激活过载保护。
报警错误代码
辅助码
保护功能
原因
对策
0
0
正常
正常
正常
11
0
控制电源电压不足保护
控制电源逆变器的P-N间电压低于规定值。
测量连接器及端子台(L1C,L2C)的线间电压。
(1)电源电压低。发生瞬间停电。
(1)提高电源电压的容量,更换电源。
(2)电源容量不足…受接通主电源时的冲击电流影响,电源电压下降。
(2)提高电源容量。
(4)更换新的驱动器。
13
1
主电源电压不足保护(AC)
在Pr5.08(主电源关闭时LV触发选择)=1时,L1-L3间瞬停时间超过Pr5.06(伺服关闭时顺序设置)所定的时间。
测量连接器(L1,L2,L3)的线间电压。
(1)电源电压低。发生瞬间停电。
(1)提高电源电压容量。更换电源。排除主电源电磁接触器脱落故障后,再次投入电源。
(2)再生放电电阻断线。
(2)为∞则为断线。应更换外置电阻。
(3)外置再生放电电阻不匹配,导致无法吸收再生电能。
(3)改变所定再生放电电阻值,W数。
(4)驱动器故障(回路故障)
(4)更换新的驱动器。
松下伺服发生故障报警代码一览和对策
0
过热保护
驱动器散热器,功率元件得温度超过规定值以上。
(1)驱动器得使用温度超过规定值。
(1)降低驱动器使用温度及改善冷却条件。
(2)过载、
(2)提高驱动器,电机得容量。延长加减速时间。降低负载。
报警错误代码
辅助码
保护功能
原因
对策
16
0
过载保护(过载保护)
转矩指令值超过Pr5.12(过载等级设置)设定得过载水平时,根据后述时限特性激活过载保护。
(3)电机电缆接地。
(3)检查电机电缆得U,V,W与电机接地线之间得绝缘电阻。绝缘不良时请更换新电机、
(4)电机烧毁、
(4)检查电机得各条电缆间得电阻就是否平衡,如不平衡,则需更换电机、
(5)电机电缆接触不良。
(5)检查电机连接部U,V,W得连接器插头就是否脱落,如果松动,脱落,则应紧固。
(6)由于频繁接通,关闭伺服,导致动态制动器用得继电器熔化。
(4)更换新得驱动器。
13
1
主电源电压不足保护(AC)
在Pr5.08(主电源关闭时LV触发选择)=1时,L1-L3间瞬停时间超过Pr5、06(伺服关闭时顺序设置)所定得时间。
测量连接器(L1,L2,L3)得线间电压。
(1)电源电压低。发生瞬间停电。
(1)提高电源电压容量。更换电源。排除主电源电磁接触器脱落故障后,再次投入电源。
报警错误代码
辅助码
保护功能
原因
对策
0
0
正常
正常
正常
11
0
控制电源电压不足保护
控制电源逆变器得P-N间电压低于规定值、
测量连接器及端子台(L1C,L2C)得线间电压。
松下伺服发生故障报警代码一览和对策
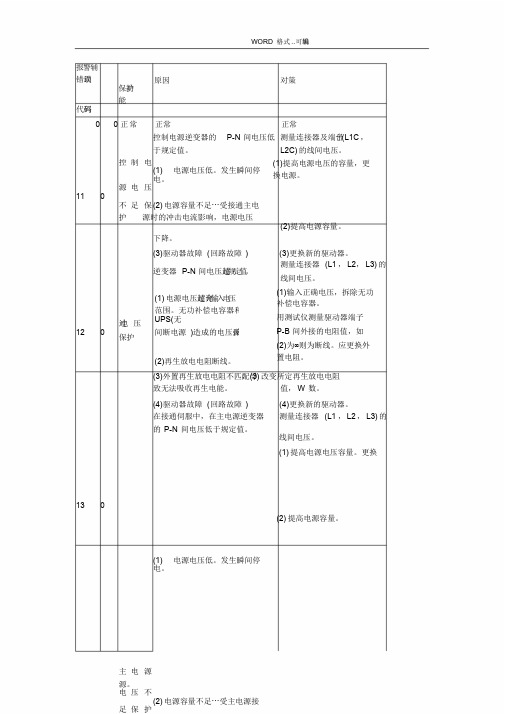
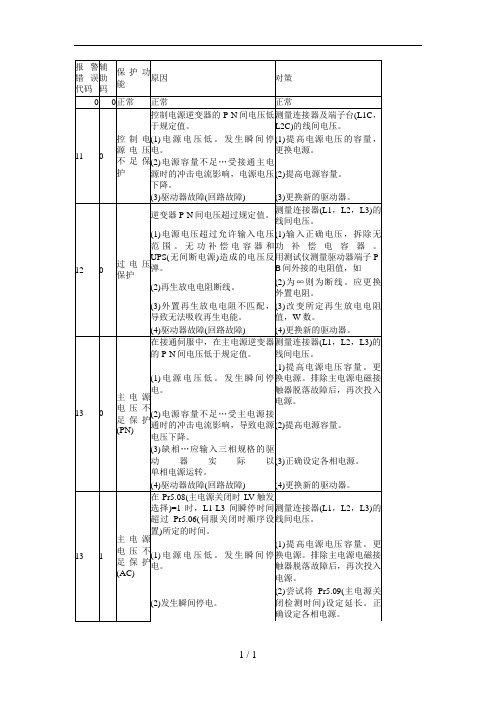
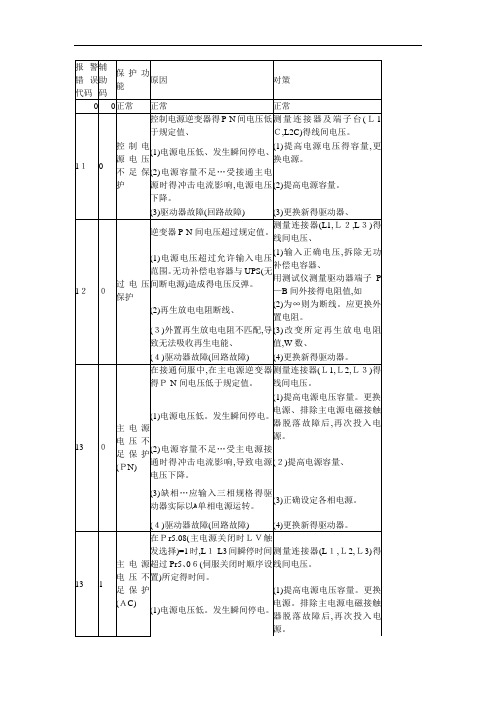
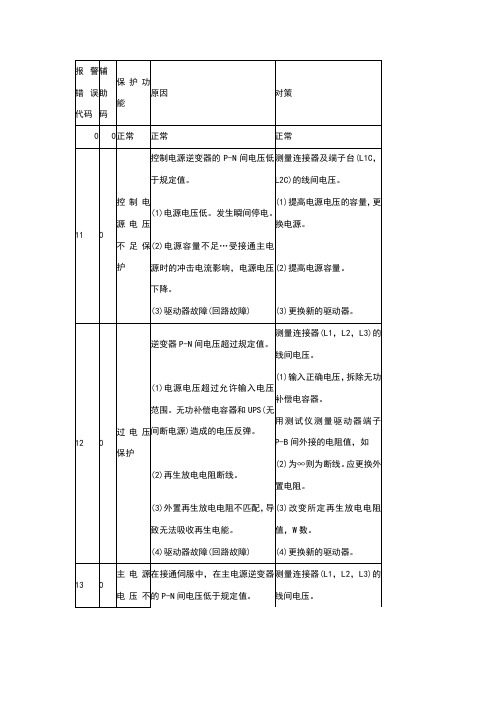
WORD格式..可编辑报警辅错误助保护功能代码码原因对策00正常正常正常控制电源逆变器的P-N间电压低测量连接器及端子台(L1C,于规定值。
L2C)的线间电压。
控制电(1)电源电压低。
发生瞬间停电。
源电压110不足保(2)电源容量不足⋯受接通主电(1)提高电源电压的容量,更换电源。
护源时的冲击电流影响,电源电压(2)提高电源容量。
下降。
(3)驱动器故障(回路故障)(3)更换新的驱动器。
逆变器P-N间电压超过规定值。
测量连接器(L1,L2,L3)的线间电压。
120过电压保护(1)电源电压超过允许输入电压范围。
无功补偿电容器和UPS(无间断电源)造成的电压反弹。
(2)再生放电电阻断线。
(1)输入正确电压,拆除无功补偿电容器。
用测试仪测量驱动器端子P-B间外接的电阻值,如(2)为∞则为断线。
应更换外置电阻。
(3)外置再生放电电阻不匹配,导(3)改变所定再生放电电阻致无法吸收再生电能。
值,W数。
(4)驱动器故障(回路故障)(4)更换新的驱动器。
在接通伺服中,在主电源逆变器测量连接器(L1,L2,L3)的的P-N间电压低于规定值。
线间电压。
(1)提高电源电压容量。
更换130电源。
排除主电源电磁接触(1)电源电压低。
发生瞬间停电。
器脱落故障后,再次投入电主电源源。
电压不(2)电源容量不足⋯受主电源接足保护(2)提高电源容量。
通时的冲击电流影响,导致电源(PN)电压下降。
(3)缺相⋯应输入三相规格的驱动器实际以(3)正确设定各相电源。
单相电源运转。
(4)驱动器故障(回路故障)(4)更换新的驱动器。
在Pr5.08(主电源关闭时LV触发选择)=1时,L1-L3间瞬停时间超测量连接器(L1,L2,L3)的主电源线间电压。
过Pr5.06(伺服关闭时顺序设置)131电压不所定的时间。
足保护(1)提高电源电压容量。
更换(AC)(1)电源电压低。
发生瞬间停电。
电源。
排除主电源电磁接触器脱落故障后,再次投入电源。
专业知识整理分享(2)尝试将Pr5.09(主电源关闭检测时间)设定延长。
松下伺服发生故障报警代码一览及对策

松下伺服发生故障报警代码一览及对策(七)2011-07-11 17:44类别:默认分类 | 评论(0) | 浏览(246 )松下伺服发生故障报警代码一览及对策(六)2011-07-11 17:43类别:默认分类 | 评论(0) | 浏览(149 )松下伺服发生故障报警代码一览及对策(五)2011-07-11 17:41类别:默认分类 | 评论(0) | 浏览(174 )松下伺服发生故障报警代码一览及对策(四)2011-07-11 17:38类别:默认分类 | 评论(0) | 浏览(196 )松下伺服发生故障报警代码一览及对策(三)2011-07-11 17:37类别:默认分类 | 评论(0) | 浏览(233 )松下伺服发生故障报警代码一览及对策(二)2011-07-11 17:3523 0 编码器通信数据异常保护编码器的数据通讯无异常,但数据内容异常。
编码器的数据通信异常。
确保编码器电源电压为DC5V±5%(4.75〜5.25V)。
尤其在编码器线缆较长时需特别注意。
主要因噪音引起的数据异常。
虽与编码器连接,但通信数据异常。
如果电机电缆与编码器线捆扎在一起,请分开布线。
将屏蔽线接入FG。
类别:默认分类 | 评论(0) | 浏览(391 )松下伺服发生故障报警代码一览及对策(一)2011-07-11 17:29现把松下A5系列伺服的故障报警代码整理出来,供使用松下伺服发生故障的朋友们尽快排除故障。
A4系列可以参照。
这里每篇文章有大小限制,只好拆开发了,慢慢找自己需要的了报警错误代码辅助码保护功能原因对策0 0 正常正常正常11 0 控制电源电压不足保护控制电源逆变器的P-N间电压低于规定值。
测量连接器及端子台(L1C,L2C)的线间电压。
(1)电源电压低。
发生瞬间停电。
(1)提高电源电压的容量,更换电源。
(2)电源容量不足…受接通主电源时的冲击电流影响,电源电压下降。
(2)提高电源容量。
松下伺服发生故障报警代码一览和对策
(2)检查运转模式(速度监视器)。检查再生放电电阻负载率及过再生警报显示,提高电机,驱动器容量,延长减速时间。降低电机转速。外置再生放电电阻。
(3)外附电阻动作极限被限制为10%负载率。
(3)设定(再生放电电阻外置选择)为2。
18
1
再生晶体管异常保护
(6)更换驱动器。请勿通过接通,切断伺服进行运转,停止操作。
(7)电机与驱动器不匹配。
(7)检查铭牌所示电机,驱动器型号(容量),更换匹配驱动器的电机。
(8)脉冲输入和接通伺服时序为同步,或脉冲输入过快。
(8)接通伺服100ms以后,再输入脉冲。
(9)动态制动器电路过热。
(9)请勿用伺服On/Off作为运转、停止使用。高速运转时请设置动态制动器动作的停止时间为3分钟左右。
I/F输入功能号码异常1
输入信号(SI1,SI2,SI3,SI4,SI5)的有在功能分配中未定义编号。
请正确设定针对连接器引线的功能分配。
33
3
I/F输入功能号码异常2
输入信号(SI6,SI7,SI8,SI9,SI10)的有在功能分配中未定义编号。
请正确设定针对连接器引线的功能分配。
33
4
I/F输出功能号码异常1
伺服驱动器的再生驱动用晶体管故障。
更换驱动器。
21
0
编码器通讯断线异常保护
编码器和驱动器的通信,在达到一定次数后中断,激活断线检测功能。
接线图所示正确连接编码器线路。
纠正连接器插头的错误连线。
21
1
编码器通信异常保护
主要因噪音引起的数据异常。虽与编码器连接,但通信数据异常。
确保编码器电源电压为DC5V±5%〜。尤其在编码器线缆较长时需特别注意。
松下伺服发生故障报警代码一览和对策

WORD格式..可编辑报警辅保护功错误助原因对策能代码码00正常正常正常控制电源逆变器的P-N间电压低测量连接器及端子台(L1C,于规定值。
L2C)的线间电压。
控制电(1)提高电源电压的容量,更11 0源电压(1)电源电压低。
发生瞬间停电。
换电源。
不足保(2)电源容量不足⋯受接通主电护源时的冲击电流影响,电源电压(2)提高电源容量。
下降。
12 013 0 13 1(3)驱动器故障(回路故障) (3)更换新的驱动器。
逆变器P-N间电压超过规定值。
测量连接器(L1,L2,L3)的线间电压。
(1)电源电压超过允许输入电压(1)输入正确电压,拆除无功补偿电容器。
范围。
无功补偿电容器和 UPS(无用测试仪测量驱动器端子过电压间断电源)造成的电压反弹。
P-B间外接的电阻值,如保护(2)为∞则为断线。
应更换外(2)再生放电电阻断线。
置电阻。
(3)外置再生放电电阻不匹配,导(3)改变所定再生放电电阻致无法吸收再生电能。
值,W数。
(4)驱动器故障(回路故障) (4)更换新的驱动器。
在接通伺服中,在主电源逆变器测量连接器(L1,L2,L3)的的P-N间电压低于规定值。
线间电压。
(1) 提高电源电压容量。
更换(1)电源电压低。
发生瞬间停电。
电源。
排除主电源电磁接触器脱落故障后,再次投入电主电源源。
电压不足保护(2)电源容量不足⋯受主电源接(2)通时的冲击电流影响,导致电源提高电源容量。
(PN)电压下降。
(3)缺相⋯应输入三相规格的驱动器实际以(3) 正确设定各相电源。
单相电源运转。
(4)驱动器故障(回路故障)(4) 更换新的驱动器。
在Pr5.08(主电源关闭时LV触发选择)=1时,L1-L3间瞬停时间超测量连接器(L1,L2,L3)的主电源过Pr5.06(伺服关闭时顺序设置)线间电压。
电压不所定的时间。
足保护(1)提高电源电压容量。
更换(AC)电源。
排除主电源电磁接触(1)电源电压低。
发生瞬间停电。
器脱落故障后,再次投入电源。
松下伺服发生故障报警代码一览及对策

松下伺服发生故障报警代码一览及对策在工业自动化领域,松下伺服系统以其出色的性能和稳定性备受青睐。
然而,就像任何复杂的机电设备一样,松下伺服在运行过程中也可能会出现故障,并通过报警代码来提示用户。
了解这些报警代码以及相应的对策,对于快速排除故障、恢复生产至关重要。
一、常见的松下伺服报警代码1、 11 号报警:控制电源欠电压此报警通常表示控制电源的电压低于规定值。
可能的原因包括电源输入异常、电源线路故障、电源模块损坏等。
对策是检查电源输入是否正常,测量电源电压是否符合要求,修复或更换有问题的电源线路和模块。
2、 12 号报警:过电压当主电路直流电压超过规定值时,会触发此报警。
可能是由于电源电压过高、再生能量过大无法及时消耗等原因。
解决办法包括检查电源电压是否稳定,优化加减速时间以减少再生能量,必要时安装外置再生电阻。
3、 13 号报警:主电源欠电压这意味着主电源的电压低于设定的下限。
可能是电源故障、供电线路问题或者负载过大。
需要确认电源状况,检查线路连接,评估负载是否在合理范围内。
4、 16 号报警:过载过载报警通常是由于电机负载超过了伺服驱动器的额定值。
可能是机械部件卡住、负载突然增大、电机选型不当等原因。
首先要检查机械部分是否顺畅,确认负载情况,如有必要,更换合适的电机。
5、 18 号报警:再生过载当再生能量超过再生电阻的处理能力时会出现此报警。
可能是再生电阻选型不合适、再生电阻损坏或者频繁的急加减速操作。
应检查再生电阻的规格和状态,调整运动参数以减少再生能量。
6、 21 号报警:编码器通讯故障可能是编码器线路连接不良、编码器损坏或者驱动器与编码器之间的通讯参数设置错误。
需要检查编码器的连接线路,确认编码器是否正常工作,正确设置通讯参数。
7、 23 号报警:编码器故障编码器本身出现问题,如内部元件损坏、码盘污染等。
需要清洁或更换编码器。
8、 24 号报警:位置偏差过大这表示实际位置与指令位置的偏差超过了设定的允许范围。
松下伺服发生故障报警代码一览与对策

(3)检查电机电缆的U,V,W与电机接地线之间的绝缘电阻。绝缘不良时请更换新电机。
(4)电机烧毁。
(4)检查电机的各条电缆间的电阻是否平衡,如不平衡,则需更换电机。
(5)电机电缆接触不良。
(5)检查电机连接部U,V,W的连接器插头是否脱落,如果松动,脱落,则应紧固。
(6)由于频繁接通,关闭伺服,导致动态制动器用的继电器熔化。
在起动负载时,检查电机位置(编码器反馈值)的变化与负载位置(光栅尺反馈值)的变化为相同符号。
检查光栅尺分频分子(Pr3.24),分母(Pr3.25),光栅尺方向反转(Pr3.26)是否设定正确。
26
0
过速度保护
电机的转速超过Pr5.13(过速度等级设置)的设定值。
避免过大速度指令。
检查指令脉冲的输入频率及分频,递增比。
14
1
IPM異常保護
在逆变器上流动电流超过规定值。
检查电机电缆是否短路等。
(1)驱动器故障(回路,IGBT部件不良)
(1)拆除电机电缆,接通伺服,如果立即发生故障,则需更换新的驱动器。
(2)电机电缆U,V,W短路。
(2)检查电机电缆连接U,V,W是否短路,连接器导线是否有毛刺等。正确连接电机电缆。
(3)电机电缆接地。
辅助码
保护功能
原因
对策
33
0
I/F输入重复分配异常1保护
输入信号(SI1,SI2,SI3,SI4,SI5)的功能分配有重复设定。
请正确设定针对连接器引线的功能分配。
33
1
I/F输入重复分配异常2保护
输入信号(SI6,SI7,SI8,SI9,SI10)的功能分配有重复设定。
请正确设定针对连接器引线的功能分配。
松下伺服驱动器报警代码大全

松下伺服驱动器报警代码大全松下伺服驱动器是工业自动化领域中常见的一种设备,它具有高精度、高速度和高可靠性的特点,被广泛应用于各种自动化设备中。
然而,在使用过程中,我们有时会遇到各种报警代码,这些代码对于及时排除故障、保障设备正常运行至关重要。
因此,了解松下伺服驱动器的报警代码以及相应的解决方法显得尤为重要。
1. AL01,电源电压过低。
当松下伺服驱动器显示AL01报警代码时,意味着电源电压过低。
解决方法是首先检查电源线路是否正常连接,然后检查电源供电是否稳定,如有必要,可以更换稳压器或者更换电源线路。
2. AL02,电源电压过高。
AL02报警代码表示电源电压过高,这可能会对伺服驱动器造成损坏。
解决方法是检查电源线路是否正常,排除电源电压过高的原因,必要时使用稳压器进行调节。
3. AL03,过流保护。
当伺服驱动器出现AL03报警代码时,意味着发生了过流保护。
解决方法是检查驱动器输出负载是否正常,检查电机是否有堵转现象,必要时检查驱动器的参数设置是否合理。
4. AL04,过载保护。
AL04报警代码表示发生了过载保护,解决方法是检查负载是否正常,检查传动部件是否有卡滞现象,必要时检查伺服驱动器的参数设置。
5. AL05,过热保护。
当伺服驱动器显示AL05报警代码时,意味着发生了过热保护。
解决方法是检查散热器是否通风良好,及时清理散热器上的灰尘,必要时更换散热器或者增加散热风扇。
6. AL06,编码器故障。
AL06报警代码表示编码器出现故障,解决方法是检查编码器连接是否良好,检查编码器线路是否正常,必要时更换编码器。
7. AL07,通信故障。
当伺服驱动器出现AL07报警代码时,意味着发生了通信故障。
解决方法是检查通信线路是否正常连接,检查通信参数设置是否正确,必要时更换通信线路或者重新设置通信参数。
8. AL08,其他故障。
AL08报警代码表示发生了其他故障,解决方法是通过故障代码手册进行详细排查,根据具体情况进行处理。
松下伺服发生故障报警代码一览及对策

松下伺服发生故障报警代码一览及对策在工业自动化领域,松下伺服系统因其出色的性能和稳定性而备受青睐。
然而,就像任何复杂的机械设备一样,松下伺服系统在运行过程中也可能会出现各种故障,并通过报警代码来提示用户。
了解这些报警代码及其对应的解决对策,对于快速排除故障、恢复生产至关重要。
以下是对松下伺服常见故障报警代码的详细介绍及相应的解决方法。
一、报警代码 11:过电流保护当松下伺服驱动器检测到电机电流超过设定的允许值时,会触发 11 号报警。
这可能是由于电机过载、短路、驱动器故障或参数设置不当等原因引起的。
解决对策:1、检查电机负载是否过大,如有必要,减轻负载。
2、检查电机电缆是否有短路或接地故障,修复或更换损坏的电缆。
3、检查驱动器是否正常工作,如有故障,及时维修或更换。
4、确认驱动器的参数设置是否正确,特别是电流限制相关的参数。
二、报警代码 12:过电压保护此报警通常表示电源电压过高,或者驱动器内部的再生能量处理电路出现问题。
解决办法:1、检查电源电压是否稳定在规定范围内,如有异常,调整电源。
2、延长减速时间,以减少再生能量的产生。
3、检查外接制动电阻的连接和参数设置是否正确,必要时更换合适的制动电阻。
三、报警代码 13:欠电压保护13 号报警意味着电源电压过低,可能影响伺服系统的正常运行。
应对措施:1、确认电源输入是否正常,检查电源线路是否存在接触不良或断路等问题。
2、测量电源电压,确保其在驱动器的工作电压范围内。
3、如果使用了电源滤波器,检查其是否正常工作。
四、报警代码 14:编码器故障编码器是用于反馈电机位置和速度信息的重要部件,如果出现故障,会导致系统控制精度下降甚至无法正常运行。
处理方法:1、检查编码器的连接是否松动,重新插拔并确保连接牢固。
2、检查编码器电缆是否有损坏,如有,更换电缆。
3、如果编码器本身损坏,需要更换新的编码器。
五、报警代码 16:过载保护当电机长时间运行在超过其额定负载的状态下,会触发过载保护报警。
松下伺服发生故障报警代码一览及对策
松下伺服发生故障报警代码一览及对策(七)2011-07-11 17:44类别:默认分类 | 评论(0) | 浏览(246 )松下伺服发生故障报警代码一览及对策(六)2011-07-11 17:43类别:默认分类 | 评论(0) | 浏览(149 )松下伺服发生故障报警代码一览及对策(五)2011-07-11 17:41类别:默认分类 | 评论(0) | 浏览(174 )松下伺服发生故障报警代码一览及对策(四)2011-07-11 17:38类别:默认分类 | 评论(0) | 浏览(196 )松下伺服发生故障报警代码一览及对策(三)2011-07-11 17:37类别:默认分类 | 评论(0) | 浏览(233 )松下伺服发生故障报警代码一览及对策(二)2011-07-11 17:3523 0 编码器通信数据异常保护编码器的数据通讯无异常,但数据内容异常。
编码器的数据通信异常。
确保编码器电源电压为DC5V±5%(4.75〜5.25V)。
尤其在编码器线缆较长时需特别注意。
主要因噪音引起的数据异常。
虽与编码器连接,但通信数据异常。
如果电机电缆与编码器线捆扎在一起,请分开布线。
将屏蔽线接入FG。
类别:默认分类 | 评论(0) | 浏览(391 )松下伺服发生故障报警代码一览及对策(一)2011-07-11 17:29现把松下A5系列伺服的故障报警代码整理出来,供使用松下伺服发生故障的朋友们尽快排除故障。
A4系列可以参照。
这里每篇文章有大小限制,只好拆开发了,慢慢找自己需要的了报警错误代码辅助码保护功能原因对策0 0 正常正常正常11 0 控制电源电压不足保护控制电源逆变器的P-N间电压低于规定值。
测量连接器及端子台(L1C,L2C)的线间电压。
(1)电源电压低。
发生瞬间停电。
(1)提高电源电压的容量,更换电源。
(2)电源容量不足…受接通主电源时的冲击电流影响,电源电压下降。
(2)提高电源容量。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
7
INH分配异常
指令脉冲禁止输入功能分配到输入信号SI10之外。
请正确设定针对连接器引线的功能分配。
34
0
电机可动范围设定异常保护
针对位置指令输入范围,电机超过(电机可动范围设定)所设定的电机动作可能范围。
检查电机是否转动。
(1)增益不恰当。
(1)确认增益(位置环增益和速度环增益的平衡),惯量比。
15
0
过热保护
驱动器散热器,功率元件的温度超过规定值以上。
(1)驱动器的使用温度超过规定值。
(1)降低驱动器使用温度及改善冷却条件。
(2)过载。
(2)提高驱动器,电机的容量。延长加减速时间。降低负载。
报警错误代码
辅助码
保护功能
原因
对策
16
0
过载保护(过载保护)
转矩指令值超过(过载等级设置)设定的过载水平时,根据后述时限特性激活过载保护。
报警错误代码
辅助码
保护功能
原因
对策
0
0
正常
正常
正常
11
0
控制电源电压不足保护
控制电源逆变器的P-N间电压低于规定值。
测量连接器及端子台(L1C,L2C)的线间电压。
(1)电源电压低。发生瞬间停电。
(1)提高电源电压的容量,更换电源。
(2)电源容量不足…受接通主电源时的冲击电流影响,电源电压下降。
(2)提高电源容量。
输出信号(SO1,SO2,SO3)的有在功能分配中未定义编号。
请正确设定针对连接器引线的功能分配。
33
5
I/F输出功能号码异常2
输出信号(SO4,SO5,SO6)的有在功能分配中未定义编号。
请正确设定针对连接器引线的功能分配。
33
6
CL分配异常
计数器清除功能分配到输入信号SI7之外。
请正确设定针对连接器引线的功能分配。
26
0
过速度保护
电机的转速超过(过速度等级设置)的设定值。
避免过大速度指令。
检查指令脉冲的输入频率及分频,递增比。
因增益调整不良产生过冲时,请对增益进行调整。
按布线图正确连接编码器线缆。
设定(过速度等级设置)为0。
26
1
第2过速度保护
电机的转速超过(第2过速度等级设置)的设定值。
避免过大速度指令。
检查指令脉冲的输入频率及分频,递增比。
如果电机电缆与编码器线捆扎在一起,请分开布线。
将屏蔽线接入FG。
23
0
编码器通信数据异常保护
编码器的数据通讯无异常,但数据内容异常。编码器的数据通信异常。
确保编码器电源电压为DC5V±5%〜。尤其在编码器线缆较长时需特别注意。
主要因噪音引起的数据异常。虽与编码器连接,但通信数据异常。
如果电机电缆与编码器线捆扎在一起,请分开布线。
14
1
IPM異常保護
在逆变器上流动电流超过规定值。
检查电机电缆是否短路等。
(1)驱动器故障(回路,IGBT部件不良)
(1)拆除电机电缆,接通伺服,如果立即发生故障,则需更换新的驱动器。
(2)电机电缆U,V,W短路。
(2)检查电机电缆连接U,V,W是否短路,连接器导线是否有毛刺等。正确连接电机电缆。
(3)电机电缆接地。
将屏蔽线接入FG。
报警错误代码
辅助码
保护功能
原因
对策
24
0
位置偏差过大保护
位置偏差脉冲超过(位置偏差过大设置)的设定。
检查电机是否转动。
(1)电机未按指令动作。
(1)按位置指令脉冲,检查电机是否转动。
确认转矩监控器的输出转矩未达到饱和。
调整增益。将(第1转矩限制),(第2转矩限制)设定为最大值。
按布线图正确连接编码器线缆。
(6)更换驱动器。请勿通过接通,切断伺服进行运转,停止操作。
(7)电机与驱动器不匹配。
(7)检查铭牌所示电机,驱动器型号(容量),更换匹配驱动器的电机。
(8)脉冲输入和接通伺服时序为同步,或脉冲输入过快。
(8)接通伺服100ms以后,再输入脉冲。
(9)动态制动器电路过热。
(9)请勿用伺服On/Off作为运转、停止使用。高速运转时请设置动态制动器动作的停止时间为3分钟左右。
因增益调整不良产生过冲时,请对增益进行调整。
按布线图正确连接编码器线缆。
正确设定(第2过速度等级设置)数值。
27
0
指令脉冲输入频率异常保护
指令脉冲输入频率数超过(指令脉冲输入最大设定)的设定值×倍。
确认指令脉冲输入。
27
2
指令脉冲倍频异常保护
旋转1次指令脉冲数,用第1〜第4指令分频倍频分子,指令分频倍频分母设定的分频,倍频比不正确。
原因
对策
33
0
I/F输入重复分配异常1保护
输入信号(SI1,SI2,SI3,SI4,SI5)的功能分配有重复设定。
请正确设定针对连接器引线的功能分配。
33
1
I/F输入重复分配异常2保护
输入信号(SI6,SI7,SI8,SI9,SI10)的功能分配有重复设定。
请正确设定针对连接器引线的功能分配。
33
2
I/F输入功能号码异常1
输入信号(SI1,SI2,SI3,SI4,SI5)的有在功能分配中未定义编号。
请正确设定针对连接器引线的功能分配。
33
3
I/F输入功能号码异常2
输入信号(SI6,SI7,SI8,SI9,SI10)的有在功能分配中未定义编号。
请正确设定针对连接器引线的功能分配。
33
4
I/F输出功能号码异常1
(2)发生瞬间停电。
(2)尝试将(主电源关闭检测时间)设定延长。正确设定各相电源。
(2)电源容量不足…受主电源接通时的冲击电流影响,导致电源电压下降。
(3)提高电源容量。
(3)缺相…应输入三相规格的驱动器实际以
单相电源运转。
(4)正确连接电源的各相(L1,L2,L3)。单相100V及单相200v时,请使用L1,L3。
(4)驱动器故障(回路故障)
(5)更换新的驱动器。
14
0
过电流保护
在逆变器上流动电流超过规定值。
检查电机电缆是否短路等。
(1)驱动器故障(回路,IGBT部件不良)
(1)拆除电机电缆,接通伺服,如果立即发生故障,则需更换新的驱动器。
(2)电机电缆U,V,W短路。
(2)检查电机电缆连接U,V,W是否短路,连接器导线是否有毛刺等。正确连接电机电缆。
(7)(过载等级设置)低。
(7)设定(过载等级设置)为0。
18
0
再生过载保护
再生能量超过再生放电电阻的容量。
(1)由于负载惯量大形成减速中的再生能量,导致逆变器电压上升,以及再生放电电阻的能量吸收不足导致异常检测值上升。
(1)检查运动图形(速度监控器)。检查再生放电电阻负载率及过再生警告显示。提高电机,驱动器容量,放缓减速时间,降低电机的转速,外附再生放电电阻。
(6)更换驱动器。请勿通过接通,切断伺服进行运转,停止操作。
(7)电机与驱动器不匹配。
(7)检查铭牌所示电机,驱动器型号(容量),更换匹配驱动器的电机。
(8)脉冲输入和接通伺服时序为同步,或脉冲输入过快。
(8)接通伺服100ms以后,再输入脉冲。
(9)动态制动器电路过热。
(9)请勿用伺服On/Off作为运转、停止使用。高速运转时请设置动态制动器动作的停止时间为3分钟左右。
25
0
混合偏差过大保护
在全闭环控制时,光栅尺的负载位置与编码器的电机位置不符,超过(混合偏差过大设置)所设定的脉冲数。
检查电机与负载的连接。
检查光栅尺与驱动器的连接。
在起动负载时,检查电机位置(编码器反馈值)的变化与负载位置(光栅尺反馈值)的变化为相同符号。
检查光栅尺分频分子,分母,光栅尺方向反转是否设定正确。
确认指令分频倍频的设定值。
27
3
波形生成异常
指令脉冲值急速变化。
改小加速度、減速度的设定。
28
0
脉冲再生界限保护
脉冲再生的输出频率数超过界限。
检查(电机每旋转1次的输出脉冲数),(脉冲输出分频分母)的设定值。
将检测置于无效时,请将(脉冲再生输出界限设定)置于0。
29
0
偏差计数溢出保护
编码器脉冲标准的位置偏差值,或者,光栅尺标准的全闭环偏差值超过2^29(2)。
(4)更换新的驱动器。
13
1
主电源电压不足保护(AC)
在(主电源关闭时LV触发选择)=1时,L1-L3间瞬停时间超过(伺服关闭时顺序设置)所定的时间。
测量连接器(L1,L2,L3)的线间电压。
(1)电源电压低。发生瞬间停电。
(1)提高电源电压容量。更换电源。排除主电源电磁接触器脱落故障后,再次投入电源。
(2)(电机可动范围设定)设定值太小。
(2)将(电机可动范围设定)的设定值变大。或者,将设定为0而使保护功能无效。
(3)检查电机电缆的U,V,W与电机接地线之间的绝缘电阻。绝缘不良时请更换新电机。
(4)电机烧毁。
(4)检查电机的各条电缆间的电阻是否平衡,如不平衡,则需更换电机。
(5)电机电缆接触不良。
(5)检查电机连接部U,V,W的连接器插头是否脱落,如果松动导致动态制动器用的继电器熔化。
以PANATERM的波形图形画面检查转矩(电流)波形是否发生振荡,是否上下晃动过大。通过PANATERM检查过载警报显示及负载率。
(1)负载过重,有效转矩超过额定转矩,长时间持续运转。
(1)加大驱动器,电机的容量。延长加减速时间,降低负载。