ENVI4.8版本中高光谱遥感——SPEAR Tools简介
4ENVI高光谱分析
从光谱影像上获得光谱曲线
高光谱图像
空间成像的同时,记录 下成百个连续光谱通道 数据
从每个像元均可提取 一条连续的光谱曲线
对高光谱图像的处理实质是对像元光谱曲线的定量 化处理与分析
高光谱成像技术
成像光谱仪: 成像光谱仪:
与地面光谱辐射计相比, 与地面光谱辐射计相比, 成像光谱仪不是在" 成像光谱仪不是在"点" 上的光谱测量, 上的光谱测量,而是在 连续空间上进行光谱测 量,因此它是光谱成像 的; 与传统多光谱遥感相比, 与传统多光谱遥感相比, 其光谱通道不是离散而 是连续的, 是连续的,因此从它的 每个像元均能提取一条 平滑而完整的光谱曲线. 平滑而完整的光谱曲线.
使用ENVI大气校正模块——输入文件准备 输入文件准备
数据是经过定标后的辐射亮度(辐射率) 数据是经过定标后的辐射亮度(辐射率)数据 数据带有中心波长(wavelenth) 数据带有中心波长(wavelenth)值,如果是高光谱还必须有波段宽 FWHM) 这两个参数都可以通过编辑头文件信息输入( 度(FWHM),这两个参数都可以通过编辑头文件信息输入(Edit Header). Header). 数据类型 支持四种数据类型:浮点型(floating), ),4 支持四种数据类型:浮点型(floating),4-byte signed 2integers,以及 integers, 2-byte signed integers,以及 2-byte unsigned integers. integers. 数据存储类型: ENVI标准栅格格式文件 且是BIP或者BIL 标准栅格格式文件, BIP或者BIL. 数据存储类型: ENVI标准栅格格式文件,且是BIP或者BIL. 波谱范围:flaash能够做的数据光谱范围是0.4-2500μm. 能够做的数据光谱范围是0.4 波谱范围:flaash能够做的数据光谱范围是0.4-2500μm.
ENVI高光谱分析技术
ENVI高光谱分析技术ENVI高光谱分析技术指的是利用ENVI软件和高光谱数据对地球表面进行分析和解译的技术。
高光谱分析技术是一种通过检测和记录地球表面上的物质反射和辐射特征来获取地物信息的方法。
通过分析不同波长的光谱数据,可以对地表进行分类、监测和测量,同时提供了对地球表面物质和环境变化的深入理解。
ENVI软件是一款功能强大、易于使用的高光谱遥感图像处理和分析软件。
它可以对高光谱数据进行校正、预处理、分割、分类、特征提取和变化检测等操作,进一步提取和分析高光谱数据中的信息。
ENVI软件可以处理来自多个传感器和平台的高光谱数据,包括卫星、航空和地面平台。
高光谱分析技术的主要步骤包括:1.数据获取和预处理:包括获取高光谱数据源,对数据进行几何校正、大气校正和辐射校正等预处理,以消除大气和仪器引起的影响。
2.高光谱数据展示和可视化:通过ENVI软件可以将高光谱数据以图像或光谱曲线的形式进行可视化,直观展示不同波段的反射率或辐射亮度。
3.特征提取和分类:通过ENVI软件中的分类算法,可以对高光谱数据进行地物分类,将不同类型的地物分开并标记出来。
常用的分类算法包括最大似然分类、支持向量机分类等。
4.目标检测和提取:通过高光谱分析技术,可以识别和提取特定目标或特征,如植被指数、污染物浓度等。
5.变化检测和监测:通过对不同时期的高光谱数据进行比较,可以检测地表发生的变化,如土地利用变化、植被覆盖变化等。
6.数据分析和解释:通过对高光谱数据中的光谱曲线进行分析,可以推断地表物质的成分和性质,并进行解释和评估。
高光谱分析技术在许多领域中得到广泛应用。
在农业领域,可以通过分析作物的生长状态、养分含量和病虫害情况,提供精准的农作物管理和决策支持。
在环境监测领域,可以监测水质、土壤质量、植被变化等环境指标,提供环境保护和可持续发展的数据支持。
在城市规划和土地管理领域,可以分析土地利用类型、城市扩张和更新等信息,为城市发展提供科学依据。
高光谱ENVI使用方法简介
高光谱制图—FLAASH大气校正
FLAASH是目前精度最高的大气辐射校正模型, 使用了 MODTRAN 4+ 辐射传输模型的代码,基 于像素级的校正 FLAASH可对Landsat, SPOT, AVHRR, ASTER, MODIS, MERIS, AATSR, IRS等多光谱、高光谱 数据、航空影像及自定义格式的高光谱影像进行 快速大气校正分析。能有效消除大气和光照等因 素对地物反射的影响,获得地物较为准确的反射 率和辐射率、地表温度等真实物理模型参数
高光谱制图—FLAASH大气校正(5)
如果要自动保存前面所输入的FLAASH参 数 如果需要生成相关诊断文件(如通道定义 文件等)
高光谱影像地理坐标定位
空间遥感平台在传感器采集数据的同时也精确地 记录了自身的几何信息,使用这些几何信息如星 历、姿态数据以及传感器探元与成像数据上像元 间的几何关系等,可以计算出影像上每一个像元 所对应的经纬度,其结果将作为影像数据的辅助 地理信息一并打包发布给用户。利用这些详细的 输入几何信息(Input Geometry)使得影像不需 要选择大量地面控制点就可以进行几何精纠正, 即ENVI所谓的地理坐标定位Georeference)。
比较N维散点图和二维散点图 利用N维散点图进行端元选取,理解使用菜 单Class Controls的使用 N维可视化仪同光谱剖面的链接,使用鼠 标中键来进行光谱曲线的绘制 光谱分析与N维可视化仪连接起来
高光谱影像分析-光谱切面
光谱切面包括水平切面、垂直切面和任意 方向切面。 切面是一幅ENVI影像,沿水平方向的切面, 样本数等于光谱波段数,行数等于采样数; 沿垂直方向的切面,样本数等于行数;对 于任意方向的切面,样本数等于沿ROI折 线的像元总数
高光谱数据的制图方法简介
高光谱数据的制图方法简介ENVI软件在Spectral菜单中提供许多波谱制图方法,包括:二进制编码、波谱角制图、线性波段预测(LS-Fit)、线性波谱分匹配滤波、混合调制匹配滤波、包络线去除,以及波谱特征拟合等。
本文主要介绍几种高光谱数据处理的过程操作。
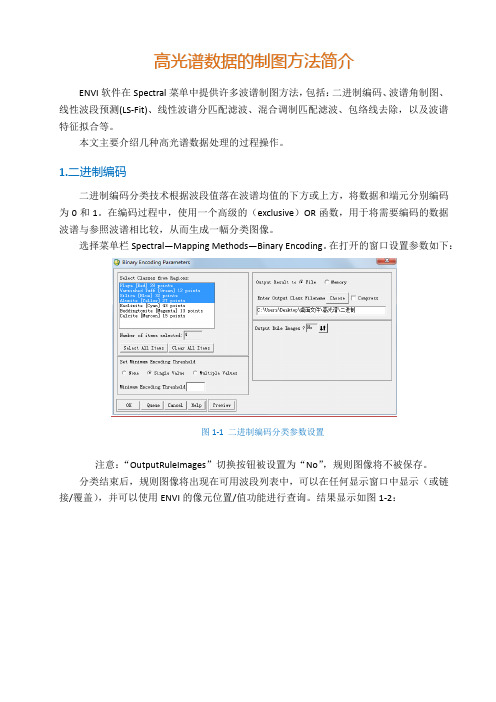
1.二进制编码二进制编码分类技术根据波段值落在波谱均值的下方或上方,将数据和端元分别编码为0和1。
在编码过程中,使用一个高级的(exclusive)OR函数,用于将需要编码的数据波谱与参照波谱相比较,从而生成一幅分类图像。
选择菜单栏Spectral—Mapping Methods—Binary Encoding。
在打开的窗口设置参数如下:图1-1 二进制编码分类参数设置注意:“OutputRuleImages”切换按钮被设置为“No”,规则图像将不被保存。
分类结束后,规则图像将出现在可用波段列表中,可以在任何显示窗口中显示(或链接/覆盖),并可以使用ENVI的像元位置/值功能进行查询。
结果显示如图1-2:图1-2 原影像图(左)与二进制编码分类结果图(右)2. 波谱角分类波谱角分类(SAM)是一种基于自身的波谱分类方法,这种方法将图像波谱与参照波谱在N-维空间进行匹配。
SAM用到的参照端元波谱可以来自于ASCII文件、波谱库、统计文件或直接从图像中抽取(如ROI均值波谱),本实验中用的是ROI均值波谱。
SAM把端元波谱(被认为是一个N维向量,N维波段数)和像元向量放在n维空间中进行角度比较。
较小的角度代表象元与参照波谱匹配紧密。
这一技术用于数据定标时,对照度和反照率的影响并不敏感。
选择菜单栏Spectral—Mapping Methods—Spectral Angle Mapper。
设置参数如图2-1,波谱角分类结果,如图2-2:图2-1 波谱角分类参数设置图2-2 波谱角分类结果影像3.LS-Fit(线性波段预测)LS-Fit使用一个最小方框(least squares)拟合技术来进行线性波段预测。
ENVI的高光谱处理

专题二十四 使用ENVI的高光谱工具处理多光谱数据(节选)1.1.专题概述本专题的目的是向用户展示如何使用ENVI先进的高光谱工具对多光谱数据进行分析。
要更好地理解高光谱处理的概念及其工具,请参见ENVI高光谱辅导指南。
要获取额外的详细信息,请参见《ENVI遥感影像处理实用手册》(ENVI User’s Guide)或者ENVI的在线帮助。
♦本专题中使用的文件光盘:《ENVI遥感影像处理专题与实践》附带光盘 #1♦背景知识ENVI并非仅设计成高光谱影像处理系统。
在1992年,ENVI的开发者就决定开发出一个通用的影像处理软件,它包含一整套的基本处理工具,弥补了商业软件缺乏强大灵活处理功能的不足,使得它能够处理各种科学格式的影像数据。
它对全色、多光谱、高光谱以及基本和改进雷达影像数据都提供了支持。
当前,ENVI包含了与其它主要影像处理系统(例如:ERDAS,ERMapper和PCI)相同的基本处理功能。
其中,ENVI在前沿遥感研究中采用了许多不同的先进算法。
虽然这些算法都是在处理成像光谱仪数据或者多达上百个波谱波段的高光谱数据基础之上发展而来,但是它们也可以应用到多光谱数据和其它标准数据类型的处理上。
本专题将对某些分析Landsat Thematic Mapper(TM)数据的方法进行介绍。
本专题分为两个独立的部分:1)使用标准或者经典多光谱分析技术,对TM影像数据进行典型的多光谱分析,2)使用ENVI高光谱工具对相同的数据集进行分析。
1.2.使用ENVI的高光谱工具分析多光谱数据♦读取TM影像数据z要从磁带中读取数据,可以在ENVI主菜单中选择File → Tape Utilities → Read Known Tape Formats → Landsat TM(或者对于新的EDC-格式的磁带选择NLAPS)。
z要从光盘中读取数据,可以选择File →Open External File → Landsat → Fast,或者选择File → Open External File → Landsat → NLAPS(对于NLAPS数据)。
Hyperion高光谱预处理利器Hyperion Tools V2.0

Hyperion高光谱预处理利器Hyperion Tools V2.0(2012-06-13 08:29:47)转载▼标签:分类:ENVI扩展工具hyperion处理hyperion去条带高光谱处理envi5杂谈Hyperion工具是一个免费的ENVI扩展工具,该工具是用来读取、修正和使用L1R、L1G/L1T级别的Hyperion。
设计Hyperion工具是为了方便hyperion数据的使用,其最基本的功能是把L1R HDF和L1G/L1T GeoTIFF数据转换成包含中心波长、波长半径和坏波段信息的ENVI格式文件。
对于每一个输入数据的格式还包含了一些选项功能,包括条纹噪声修复、掩膜文件生成等,在使用Hyperion 数据时将更加有用。
工具下载地址:/file/c25kvb9p工具安装方式:(一)在ENVI4.8及之前版本,把hyperion_tools.sav和hyperion_wl_fwhm_bbl.txt文件放在你的ENVI安装目录下的save_add文件夹里,然后重启ENVI。
(二)在ENVI5里面,把hyperion_tools.sav和hyperion_wl_fwhm_bbl.txt文件放在你的ENVI安装目录下Exelis\ENVI50\extensions或者Exelis\ENVI50\classic\save_add里面在ENVI4.8及之前版本,以及ENVI5.0的Classic版本里,通过File->Open External File->EO-1→Hyperion Tools进入此工具。
在ENVI5.0中,在ToolBox->Extensions中能找到这个工具。
这个工具的操作非常简单,下面介绍其基本用法和主要的功能: L1R数据点击“Input HDF”选择L1R文件。
然后点击”Output Path”为新的ENVI格式的数据选择存放文件夹。
点击“Process”进行转换处理。
ENVI高光谱分析技术

Water Vapor (std atm-cm)
518 1Байду номын сангаас60
1762 2589 3636
5119
Water Vapor (g/cm2) 0.42 0.85
HYDICEAISA、DAIS、CASI、HYMAP
AVIRIS
• Spectral coverage: • VIS to NIR (400-2500nm) • Spectral bands: 224 • Spectral resolution: <10nm • FOV: 30° • IFOV: 1.0 mrad • Digitization:12 bits
• 基于统计学模型
– 平场域定标 – 对数残差 – 内部平均反射率法 – 经验线性
• 基于简化辐射传输模型的黑暗像元法 • 基于统计的不变目标法 • 基于植被指数的大气阻抗植被指数法 • ……
ENVI大气校正模块
• ENVI的大气校正模块的模型为MODTRAN 4+模型,它是 由Spectral Sciences, Inc. (SSI)和Air Force Research Labs (AFRL)合作开发,ITT VIS进行整合和图形化。
使用ENVI大气校正模块——基本参数设置
• 传感器基本信息设置
使用ENVI大气校正模块——大气模型
Model Atmosphere
Sub-Arctic Winter (SAW) Mid-Latitude Winter (MLW) U.S. Standard (US) Sub-Arctic Summer (SAS) Mid-Latitude Summer (MLS) Tropical (T)
• 多光谱与高光谱的模型基础一样:MODTRAN 4+。这个 模块通过高光谱像素光谱上的特征来估计大气的属性,可 以有效地去除水蒸气, 气溶胶散射,漫反射的邻域效应。 采用向导式操作流程,还包括快速大气校正功能。
1.Envi遥感图像处理软件及其常用功能简介
遥感实验课第一课 Envi遥感图像处理软件及其常用功能简介一、教学目的与要求本次实习要求了解Envi遥感图像处理软件,掌握各种文件格式的打开方法并能在此基础上对图像进行简单的处理,如旋转、裁减、拉伸等。
二、重点难点⒈本次实习课的重点是各种文件格式的打开以及简单的图像处理。
⒉利用矢量文件其目的是在图像上增加一个图层,本次实习的实例是在一幅已校准的图像上加一幅行政区划图。
三、教学内容⒈目前流行的遥感图像处理软件介绍①ERDAS IMAGINEERDAS IMAGINE软件是美国ERDAS公司开发的遥感图像处理系统,公司成立于1978年,总部设在美国佐治亚州的亚特兰大市,目前ERDAS IMAGINE软件的版本为8.4。
②PCI③EnviENVI,The Environment for Visualizing Images,由美国RSI公司开发的遥感图像处理系统,开发语言为IDL,是处理、分析并显示多光谱数据、高光谱数据和雷达数据的高级工具。
2000年获美国权威机构NIMA遥感软件测评第一。
⒉Envi 3.4的安装⒊各种文件格式的打开方法BMP、JPG、TIF、TM Data、ERMapper等文件格式。
⒋利用矢量文件在图像上增加图层⒌图像的简单处理旋转、裁减、拉伸等。
四、教学步骤⒈Envi 3.4的安装――复制完的文件改成存档非只读方式。
该图为Envi 3.4的安装界面。
软件安装完之后会出现如下的对话框,我们选择“No”。
⒉BMP文件格式的打开文件:1.bmpFile-Open External Fille(外部文件)-Generic Formats(一般格式文件)窗口说明打开BMP文件后将出现一个名为Availlable Bands List窗口,该窗口主要显示当前已打开的文件;Gray Scale单选项为选择灰度图像;RGB Color为选择彩色图像,同时,选择不同的组合会产生不同的彩色图像;Display按钮可新建新的窗口或覆盖最近的窗口显示当前需要打开的文件。
2024版ENVI高光谱处理培训教材

MNF首先对数据进行白化处理, 使得不同波段的噪声具有相同的
方差。
2024/1/24
信号提取
通过迭代计算,逐步提取出信号成 分,实现信号与噪声的分离。
数据降维
MNF变换后,数据被压缩到较少的 波段中,便于后续处理和分析。
14
04
高光谱数据分类与目标识 别
2024/1/24
15
分类算法原理及实现
应用领域
广泛应用于农业、林业、地质、环境、 城市规划等领域,如作物长势监测、森 林类型识别、矿产资源勘查、环境污染 监测等。
2024/1/24
5
ENVI软件在高光谱处理中优势
强大的数据处理能力
丰富的信息提取方法
ENVI软件支持多种高光谱数据格式,提供丰 富的数据处理工具,如辐射定标、大气校正、 正射校正等。
2024/1/24
10
03
高光谱图像增强与变换
2024/1/24
11
图像增强方法介绍
01
02
03
直方图均衡化
通过拉伸像素强度分布, 增强图像的对比度,使图 像更加清晰。
2024/1/24
空间域滤波
利用滤波器对图像进行空 间域卷积,实现图像平滑、 锐化等效果。
频域增强
将图像转换到频率域,对 频率成分进行操作,如低 通、高通滤波等,再转换 回空间域。
2024/1/24
17
非监督分类方法
1 2
K均值聚类法 将高光谱数据划分为K个簇,通过迭代更新簇中 心和像素归属,使得同一簇内像素相似度最大, 不同簇间相似度最小。
ISODATA聚类法 在K均值聚类基础上引入类别合并和分裂操作, 自适应地调整类别数目和聚类中心,提高聚类效 果。
遥感图像处理系统ENVI功能简介

遥感图像处理系统ENVIENVI(The Enviroment for Visualizing Images)是美国著名的遥感科学家用交互式数据语言IDL(Interactive Data Language)开发的一套功能强大的遥感图像处理软件,能够有效地从遥感影像中提取各种目标信息,可用于地物监测和目标识别;IDL也使得ENVI具有其它同类软件无可比拟的可扩展性,全模块化的设计使得软件易于使用,操作方便灵活,界面友好,广泛地使用于地质、环境、林业、农业、军事、自然资源勘探、海洋资源管理等多个领域,并在2000、2001、2002年连续三年获得美国权威机构NIMA遥感软件测评第一。
1、ENVI功能体系ENVI包含齐全的遥感影像处理功能,包括数据输入/输出、常规处理、几何校正、大气校正及定标、全色数据分析、多光谱分析、高光谱分析、雷达分析、地形地貌分析、矢量分析、神经网络分析、区域分析、GPS联接、正射影像图生成、三维景观生成、制图等;这些功能连同丰富的可供二次开发调用的函数库,组成了非常全面的图像处理系统。
1.1数据输入/输出1972年美国发射了第一颗地球资源技术卫星ERTS-1。
从那时起,一些国家和国际组织相继发射各种资源卫星、气象卫星、海洋卫星以及监测环境灾害的卫星,包括我国发射的风云系列卫星和中巴地球资源一号卫星(CBERS-1),构成了对地观测网,多平台、多层面、多种传感器、多时相、多光谱、多角度和多种空间分辨率的遥感影像数据,以惊人的数量快速涌来。
把同一地区各类影像的有用信息聚合在一起,将有利于增强多种数据分析和环境动态监测能力,改善遥感信息提取的及时性和可靠性,有效地提高数据的使用率,为大规模的遥感使用研究提供一个良好的基础,使花费大量经费获得的遥感数据得到充分利用。
(1) ENVI能够输入的数据ENVI能处理多种卫星获取的不同传感器、不同波段和不同空间分辨率的数据,包括美国Landsat系列卫星、小卫星IKONOS和环境遥感卫星TERRA,法国SPOT卫星,我国的风云系列卫星和CBERS-1获取的数据,ENVI还准备处理未来更多传感器收集到的数据。
ENVI遥感图像处理-高光谱数据的处理与分析
1.1 ENVI Classic标准波谱库
保留原来的5种标准波谱库,存放在 …\Harris\ENVI54\classic\spec_lib,分别在5个文件夹 中,储存为ENVI波谱库格式
✓ USGS矿物波谱 ✓ 植被波谱 ✓ JPL波谱库 ✓ IGCP264波谱库 ✓ JHU波谱库
1.2 波谱库创建
元波谱收集 • 基于连续最大角凸锥(Sequential Maximum Angle Convex Cone——简
称SMACC)的端元自动提取。
4、高光谱图像物质识别
4 物质识别
ENVI提供许多波谱分析方法,包括:二进制编码、波谱 角分类、线性波段预测(LS-Fit)、线性波谱分离、光谱 信息散度、匹配滤波、混合调谐匹配滤波(MTMF)、 包络线去除、光谱特征拟合、多范围光谱特征拟合等
5.2 波谱识别
波谱角分类 /Classification/Supervised Classification/Spectral
Angle Mapper Classification
5.3 分类结果浏览及后处理
得到的结果就是ENVI的分类文件的格式,自动加载显示 在图中。
分类后处理
5.4 向导式目标识别——沙漏分析工具
4 物质识别
专题内容:
✓ 用波谱角分析方法从高光谱图像中识别物质
数据
✓ “301-技术专题:高光谱数据处理与分析\2-物质识别”
端元波谱收集
物质识别
5、高光谱图像分类
5 高光谱图像分类流程
影像文件
最小噪声分离 MNF
数据维数判断
是否从图像获得端
否
元波谱
计算纯净像元指数
N维可视化和端元选择
ENVI4.8新功能

ENVI4.8的新功能ENVI是快速、便捷、准确地从影像中提取信息的首屈一指的软件解决方案。
ENVI4.8于2010年11月16日正式发布,该版本中,ENVI与ArcGIS的一体化有了很大改进,新增激光雷达数据浏览器,新增传感器/数据格式支持,增强了ENVI EX和ENVI Zoom中的功能。
ENVI4.8的新功能包括:●与ArcGIS一体化的改进●新增LiDAR浏览器●新增传感器和文件格式的支持●ENVI库程序中新增Geodatabase读写函数●新增ENVI常用功能●ENVI Zoom的改进●ENVI EX的改进1.与ArcGIS一体化的改进随着遥感GIS一体化在各行业的应用,用户需要越来越简便的遥感GIS软件一体化操作。
ENVI4.8完全兼容ArcGIS10和ArcGIS9.3,用户可以直接在ArcGIS Toolbox中使用ENVI功能,这些ENVI工具可以用来进行GP建模和分析,此外,为ArcGIS® Server 设计的ENVI工具允许用户协调服务器上的资源分类,提高大数据量的处理和流程化分析速度。
●ENVI Tools for ArcGIS Desktop在安装ENVI4.8时,可直接将ENVI的专业图像处理功能安装到ArcGIS Desktop中。
在ArcGIS Toolbox中会拥有一个ENVI Tools工具,都是流程化的处理工具,包括:•变化检测•探测和提取感兴趣地物•分类或土地覆盖•异常探测也可以将自定义的ENVI功能添加到工具箱中,用户可在ArcGIS Desktop 平台下对栅格数据进行各样的处理。
图1:ENVI Tools for ArcGIS●ENVI Tools for ModelBuilder可以用ModelBuilder将ArcGIS Toolbox中的ENVI工具或用户自定义的工具拖放到建模界面并连接各个工具形成一个有序的操作流程。
形象地创建和执行一个GP模型,方便用户完成建模和分析,如图2,是用ArcToolbox中几个不同的工具进行建模的例子。
ENVI高光谱分析

ENVI高光谱分析ENVI(Environment for Visualizing Images)是一种用于遥感数据分析和处理的软件平台,通过其高光谱分析工具,可以对高光谱数据进行处理和解释。
高光谱分析是一种基于光谱信息的数据分析方法,可以通过测量目标物体反射或辐射出的电磁波谱,来获取物体的光谱特性以及与之相关的信息。
高光谱数据是由接收传感器采集的波长范围较宽的连续光谱数据。
与常规的彩色图像数据相比,高光谱数据包含了更多的细节和信息。
通过对高光谱数据进行分析,可以提供更准确和全面的目标物体特征、组成和状态信息。
ENVI高光谱分析提供了一系列功能强大的工具和算法,用于处理和分析高光谱数据。
首先,可以利用ENVI对高光谱数据进行预处理,如去噪、辐射校正和几何校正等。
然后,可以通过ENVI的分类分析功能对高光谱数据进行分类,将目标物体按照其光谱特性划分为不同的类别,如植被、水体、建筑物等。
此外,ENVI还提供了目标检测和变化检测的功能,可以帮助用户发现目标物体的存在和变化。
ENVI高光谱分析还支持光谱曲线的提取和分析。
用户可以选择感兴趣的区域或像素,提取其代表性的光谱曲线,并进行分析。
通过对光谱曲线进行分析,可以获取目标物体的物理特性信息,如物质组成、粒径分布等。
此外,ENVI还支持光谱相似性和光谱混合分析等功能,帮助用户更好地理解和解释高光谱数据。
ENVI高光谱分析还提供了数据可视化和结果输出的功能。
用户可以利用ENVI的图像显示和分析工具,对高光谱数据进行可视化,以便更直观地观察和分析数据。
同时,用户还可以将分析结果输出为图像文件或报告,以便与其他人共享和交流。
总而言之,ENVI高光谱分析为用户提供了一种强大且全面的工具,用于处理和解释高光谱数据。
通过利用ENVI的功能和算法,用户可以更准确地分析高光谱数据,获取目标物体的光谱特性和相关信息,从而在不同领域的应用中取得更好的效果和成效。
无论是在农业、环境、地质、气象还是其他领域,ENVI高光谱分析都可以帮助用户更好地理解和利用高光谱数据,并为实现可持续发展和智能决策提供有力支持。
高光谱与高分辨率遥感——动态监测

成都信息工程学院Chengdu University of Information Technology高光谱与高分辨率遥感实验报告实验名称:基于SPEAR工具的高光谱动态监测指导老师:夏志业学生姓名:李同同学号:20090430531 实验名称:基于SPEAR工具的高光谱动态监测2 实验目的和原理熟悉和了解SPEAR工具的高光谱动态监测的方法,了解在实验中产生的结果的意义及其分析结果。
3数据介绍:aug_25_2007、oct_07_2002、class1、class24实验步骤4.1基于SPEAR工具的高光谱动态监测4.1.1打开ENVI,选择Spectral—SPEAR Tools—Change Detection –PCA打开Change Detection –PCA工具,分别选择oct_07_2002和aug_25_2007为时相1和时相2,选择输出结果为05-07change_pca:如下图:4.1.2点击Next,进行图像配准,选择4个点进行配准。
产生多个随机点。
4.1.3点击Next,选择主成分参数(PCA Parameters)中的Transform type 为Principal Components,之后输出主成分分析结果,主成分变化之后,band1的结果输出图像的直方图如图:4.1.4从主成分变化后的图像中可以得到变化区域。
4.2分类后比较法4.2.1打开数据class1和class2两幅图像,选择Basic Tools->Change Detection->Change Detetion Statistics工具,前一时相为class1,后一时相为class24.2.2把相应的地物类型对应选择在Paired Classes里面。
4.2.3选择报表显示的内容及输出地点,像素的大小为30*30。
输出的报表与林地变化图像如下:5实验结果与分析从上图中我们可以看出两个时段中各地物之间变化的像元个数、百分比、面积的变化,以及产生的图像。
ENVI实习-高光谱遥感
高光谱遥感第三次实习一、实习任务:运用MNF变换后的波段以及散点图工具提取端元运用MNF变换后的波段以及纯净像元指数工具以及N维可视化仪提取端元运用提取的端元进行分类和制图二、实习目标以及用时:学习运用ENVI软件进行纯净像元的提取方法三、教学方式:依据实习指导书进行实验,并完成实习报告四、使用器材:美国内华达的赤铜矿AVIRIS遥感数据,该数据已经经过ATREM大气校正,ENVI遥感软件五、具体实习过程本次实习主要内容:本章选用的实验数据是一幅经过校准的AVIRIS图像,处理的结果用于地质学应用,这主要是考虑到,到目前为止地质学研究仍然是高光谱遥感的主要应用领域之一。
在ENVI主菜单下选择:File > Open Image File,在打开的文件选择窗口中选择图像文件cup95eff,点击OK打开图像:这是一幅经过校准的有50个波段的AVIRIS图像,图中显示的是将第183、193、207波段分别赋红、绿、蓝合成的彩色图像。
我们可以打开它的2-D散点图观察一下。
在主图像窗口中选择:Tools > 2-D Scatter Plots,在随即弹出的波段选择窗口中任意选择两个波段,点击OK构成2-D散点图。
这里选择的是第172、173波段。
在这幅2-D三点图上我们可以观察到,在由172和173波段组成的光谱特征空间中图像上的点明显地呈线状点云分布,说明这两个波段的相关性极强。
遥感图像的某些波段之间往往存在着很高的相关性,直观上波段图像彼此很相似,从提取有用信息的角度考虑,有相当一部分数据是多余和重复的,解决这一问题的有效方法是进行特征提取和特征选择,去相关和分离噪声。
在多光谱遥感图像处理中,我们会采取PC旋转,但是相比之下,MNF变化更适用于高光谱遥感数据。
下面我们就用MNF 变换对图像进行处理。
最低噪声分数(MNF)变换用以确定图像数据的内在维度、隔离噪声以及降低后处理的计算要求。
MNF变换的本质就是两个叠置的主成分变换。
《ENVI高光谱分析》课件

光谱分辨率高:能够获取 更精细的光谱信息
信息量大:能够获取更多 的地物信息
应用广泛:适用于多种地 物类型的识别和分类
技术难度大:需要专业的 数据处理和分析技术
农业:监测作物生长状况,评估土壤肥力 环境监测:监测大气污染、水质污染、土地利用变化 地质勘探:寻找矿产资源,评估地质灾害风险 城市规划:评估城市环境质量,规划城市发展 军事侦察:监测军事设施,评估军事活动影响 医疗健康:监测人体生理状况,评估疾病风险
目的:提高图像质量,去除噪 声和干扰
方法:使用图像融合算法,如 PCA、ICA等
步骤:选择合适的融合算法, 进行图像融合和裁剪
注意事项:保持图像的完整性 和清晰度,避免过度裁剪和融 合
噪声去除方法:滤波、平滑、降噪算法等 图像增强方法:对比度增强、亮度增强、色彩增强等 预处理步骤:数据读取、数据清洗、数据转换等 预处理工具:ENVI、Matlab、Python等
网络等
训练样本选取: 选择具有代表 性的样本作为 训练集,确保 样本多样性和
代表性
样本预处理: 对训练样本进 行归一化、标 准化等预处理, 以提高分类效
果
模型训练:使 用训练样本训 练分类器,调 整参数以优化
分类效果
模型评估:使 用测试样本评 估分类器的性 能,如准确率、 召回率、F1值
等
模型优化:根 据评估结果对 分类器进行优 化,以提高分
数据检查:检查数据是否完整、正 确,如有问题进行修复
添加标题
添加标题
添加标题
添加标题
格式转换:将数据转换为ENVI支 持的格式,如.hdr、.img等
数据预处理:对数据进行平滑、滤 波、去噪等操作,提高数据质量
辐射定标:将传感器接收到的辐射信号转换为物理量 大气校正:消除大气对辐射信号的影响 辐射定标方法:绝对定标、相对定标、光谱定标等 大气校正方法:暗像元法、辐射传输模型法等 辐射定标与大气校正的重要性:提高高光谱数据的准确性和可靠性
ENVI

什么是ENVIENVI (The Environment for Visualizing Images)是美国ITT Visual Information Solutions 公司的旗舰产品。
ENVI是由遥感领域的科学家采用IDL开发的一套功能强大的、完整的遥感图像处理软件;它是快速、便捷、准确地从地理空间影像中提取信息的首屈一指的软件解决方案,它提供先进的,人性化的使用工具来方便用户读取、准备、探测、分析和共享影像中的信息。
今天,众多的影像分析师和科学家选择ENVI来从地理空间影像中提取信息,用户数超过200,000,遍布于80个国家与地区。
已经广泛应用于科研、环境保护、气象、石油矿产勘探、农业、林业、医学、国防&安全、地球科学、公用设施管理、遥感工程、水利、海洋,测绘勘察和城市与区域规划等行业。
自2007年起,ITT Visual Information Solutions公司与著名的GIS厂商ESRI公司开展全面战略合作,共同提供遥感与GIS一体化解决方案,最新版本ENVI4.8已经成为与ArcGIS10一体化集成的最佳遥感平台。
读取几乎任何图像类型和格式ENVI支持各种类型航空和航天传感器的影像,包括全色、多光谱、高光谱、雷达、热红外、地形数据、激光雷达等。
ENVI支持90多种图像以及矢量数据格式的输入,支持多种格式图像文件的直接调入读取,包括HDF,GeoTIFF,Geodatabase和JITC认证的NITF 等格式。
同时,ENVI的企业级性能可以让您通过内部组织机构或互联网快速、轻松地访问OGC和JPIP兼容服务器上的影像。
准备您的影像ENVI提供了自动预处理工具,可以快速、轻松地预处理影像,以便进行查看浏览或其他分析。
通过ENVI,您可以对影像进行以下处理:•自定义投影坐标/投影坐标转换,支持北京54、西安80等地方坐标系•几何校正•正射校正•影像自动配准•影像定标•大气校正•创建矢量叠加•确定感兴趣区域(ROIs)•创建数字高程模型(DEMs)•影像融合,镶嵌和裁剪•调整大小,旋转,或数据类型转换探测影像ENVI提供了一个直观的用户界面和易用的工具,让您轻松、快速地浏览和探测影像。
6.ENVI4.4SPEAR工具介绍071204yang

ENVI4.4 SPEAR工具简介1.SPEAR概述SPEAR(Spectral Processing Exploitation and Analysis Resource) 是一个用于管理图像处理流程的工具,它包含了10个流程化图像处理模块。
每个子模块采用向导的方式进行流程化图像处理,使得遥感图像处理知识薄弱的非专业技术人员也能利用SPEAR熟练地进行图像处理,并获得满意的处理结果。
同时,SPEAR各子模块集成了ENVI原有的相关功能,并采用了很多先进的算法和处理方法,因此利用SPEAR进行图像处理比以前快了3-4 倍。
SPEAR包含以下10个流程化图像处理模块:PCA变化检测Subtractive变化检测道路提取水体提取数据融合分类及分类后处理水的相对深度波谱相似地物提取植被指数工具船只提取所有子模块界面风格如图1所示:图1:SPEAR子模块界面风格在界面的左侧是使用说明,右侧是数据处理界面,下面是流程化操作按钮。
每一步设置好相应的参数,选择好相应的图像处理方法后,点击Next,会自动弹出下一步操作的界面,点击Prev将返回上一步的操作界面,重新进行上一步操作。
中间所有输入输出及显示过程自动化,无需要人工参与,在默认状态下产生的中间结果都保存到指定文件夹里,同时也可以更改中间结果保存的路径。
最终结果和一些重要的中间结果自动显示在可用波段列表里,方便调用。
2.SPEAR子模块介绍2.1 PCA变化检测模块对同一区域不同时期数据进行变化检测。
利用主成分分析的方法突出变化的区域。
操作流程如下:1.输入两副多光谱数据,并且两副数据要求具有相同的波段,第一个数据是校正时所用基准数据,建议输入高分辨率影像;不一定要按照时间顺序来输入。
2.两副多光谱数据进行几何校正,有两种几何校正方法供选择:手动校正、自动校正。
自动校正参数设置:3.对校正后数据应用PCA分析或者MNF变换的方法突出变化的部分,进行变化检测。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
高光谱遥感——ENVI 4.8版本中的SPEAR Tools简介SPEAR Tools全称是光谱处理与分析工具(Spectral Processing Exploitation and Analysis Resource),在这里ENVI提供了一系列的处理工具,并形成向导引导使用者按照ENVI的标准处理影像。
SPEAR包含以下10个流程化处理模块:异常检测模块:搜索光谱不同的背景(谱异常)目标变化检测模块:检测统一地区不同时段光谱变化的异常谷歌地球桥接器:提供一个简单的方法将ENVI中的图像或矢量文件输出到Google Earth中道路提取模块:从影像中流程化提取道路信息水体提取模块:从影像中流程化提取河流,隐蔽水沟信息水的相对深度模块:从高光谱数据中快速获取感兴趣水域水的相对深度信息影像植被指数提取模块:快捷容易地确定植被的存在情况,并用多光谱图像可视化该植被的活力水平。
船只提取模块:船只提取模块,利用水和船的对比度。
以及船的纹理特征来提取船只信息。
1 异常检测模块(SPEAR Anomaly Detection)异常检测提供了一种方法来搜索光谱不同的背景(谱异常)目标,ENVI使用RXD异常探测算法来检测光谱信息异于影像背景值的目标。
由于植被在一些地区(比如在干燥的区域)光谱异常比较明显,SPEAR 异常检测模块提供了能够抑制植被的操作。
SPEAR异常检测模块能够依靠设定阈值来减小绝对误差。
SPEAR异常检测模块同时提供了滤波、核查和精度评定工具。
如果得出满意的结果,可以将其输出成shp文件的矢量格式。
从影像中提取异常信息操作流程如下:1.在ENVI主菜单栏下,选择Spectral > SPEAR Tools > Anomaly Detection。
弹出文件显示对话框,选择输入文件。
(输入的文件必须是能被ENVI识别的多光谱数据)设定保存路径。
2.设定算法模型,包括RXD、UTD、RXD-UTD。
3.设定异常检测参数,设定Mean Source的来源,指定是否需要抑制植被。
4.可以重新设定参数来确定异常,最后会弹出两幅影像,原影像与分析后结果,以作比较。
2 变化检测模块(SPEAR Change Detection)变化检测模块提供一个方法来检测影像同一地区不同时段的变化,并在图像上凸显出来,说明是什么要素发生了什么变化。
变化检测模块提供以下几种相对变化检测工具:Transform:输入数据堆栈成一个图像,然后图像变换(主成分分析,最小噪声比率,或独立成分分析)应用于所提取的特征相关的变化。
Subtractive:归一化差异植被指数(归一化植被指数),红/蓝比,和人为的比例计算的输入数据。
得出的比率数据和波段数据从影像数据中减去以创建出不同的影像。
Two Color Multi-View (2CMV):来自于时段1的波段显示在红色波段通道,来自于时段2的同一波段显示在绿色波段通道和蓝色波段通道,在一个图像里区别于其他影像的亮的部分用青色表示,暗的部分用红色表示。
颜色用来表示可能存在变化的区域。
3 谷歌地球桥接器(Googl e Earth Bridge)它提供了一个简单的方法将ENVI中的图像或矢量文件输出到Google Earth 中。
Google Earth是一个强大的数据可视化工具,它允许图像被放置在一个区域或全球范围内。
谷歌数据桥创建了一个包含矢量数据的kml格式文件。
如果选择缩略图,kml格式的矢量文件也会被输出。
Google Earth不能直接直接支持包含地理坐标的图像,通过四个角点和一个定义在kml文件上的旋转器将图像放在地球上。
为了确定图像文件能够准确叠加在上面,谷歌地球桥接器将输入图像校正到向北的方向。
如果可行将会通过包含全球高程数据库的矫正器来进行快速的坐标校准,如果快速校准失败,图像校正的四个角点会被用来作为控制点,把图像校正至正北方向。
4 影像—地图校正模块(SPEAR Image to Map Registration)影像—地图校正工具在保留原有的空间分辨率的同时,变换输入的图件来匹配基础图像的地图信息。
1.在ENVI的主菜单中,选择Spectral > SPEAR Tools > Image-to-MapRegistration,打开文件选择对话框。
2.选择两幅影像:一幅作为基础图件,另一幅是需要校正的图件。
3.选择用于自动连接点匹配的波段,大部分情况下,可见光区域的红波段的是比较合适的。
4.点击下一步,会弹出校正参数对话框,下一步,会弹出一个校正精度对话框和一个连接点对话框。
5.点击Finish,完成处理,对出向导。
5 独立成分分析(Ind ependent Components Analysis)它可以用来发现和分离图像中隐藏的噪声,可以用来降维、异常检测、降噪、分类和端元提取以及数据融合,不需要任何图像预先知识。
ICA可以把一组混合信号转化成相互独立的成分,在感兴趣信号与数据中其它信号相对较弱的情况下,这种变换要比主成分分析得到的结果更加有效。
6 道路提取模块(Lines of Communication (LOC)- Roads)从影像中流程化提取道路信息。
操作流程如下:1.输入影像数据2.选择线性信息提取方法,有两种方法可以选择监督方法(基于波谱匹配技术)步骤如下:1)大气校正,课选择六种大气校正方法中的任意一种。
2)用户为绘制道路选择训练的像素3)选择波谱处理方法,绘制道路。
有三种方法:SAM、MF and MF/SAM 比率,主成分分析,红壤指数。
非监督方法选择波谱处理方法,绘制道路。
有两种方法,主成分分析,红壤指数。
红壤指数性质如同NA VI,计算出来的结果红壤指数以白色显示。
3.输出提取结果,并可以转化成矢量数据,以shapefile格式输出。
7 水体提取模块(Lines of Communication (LOC)- Water)从影像中流程化提取河流,隐蔽水沟信息。
操作流程如下:1.输入影像数据;2.选择线形信息提取方法,有两种方法可以选择监督方法(基于波谱匹配技术)步骤如下:1)大气校正,可选择六种大气校正方法中的任意一种。
2)用户为绘制水体选择训练的像素。
3)选择波谱处理方法,绘制水体。
有三种方法SAM、MF and MF/SAM 比率,主成分分析,归一化水指数(NDWI)。
非监督方法选择波谱处理方法,绘制水体。
有两种方法:主成分分析,归一化水指数(NDWI)。
NDWI性质如同NA VI,计算出来的结果是单波段灰度图像。
输出结果,可以将结果转矢量。
8 元数据浏览器(SPEAR Metadata Browser)元数据浏览器从国家影像传输格式(NITF)图像中提取的关键元数据,并用一个简单的阅读格式来显示。
此外,这个工具提供一个方法来比较多个用来变化检测的图像,这种方法还可以在收集影像数据时浏览传感器和太阳的三维图形。
9 正射校正(SPEAR Orthorectification)一个正射校正过的影像包含了对应地面的真实几何、地形信息。
达到一定精度的传感器的传感器导致的畸变已经被去除。
正射校正变换把航空照片或卫星获得的图像转换为中心投影至地面的正交视图,从而消除了因传感器倾斜和地形起伏所带来的误差。
整幅影像上比例尺是连续的,并忽略了高低起伏,因此能够提供方向和距离上的精确的测量数据。
地理空间专业从业人员可以很方便的将正射校正数据和其他的地理信息空间数据一起应用在城市规划、资源管理和其他相关领域。
10 泛锐化图像融合方法(SPEAR Pan Sharpening)泛锐化图像融合方法是用高分辨率的全色数据与较低分辨率的多光谱数据融合创建一个彩色高分辨率的数据集。
得出的结果只能做表面上的辅助分析而不能做深入的频谱分析。
11 地形分类工具(TERCAT)在地形分类(TERCAT)工具创建的一个输出结果中,具有相似光谱特性的像素被分成类。
这些类可以是用户自己定义的或是系统自动生成。
TERCAT工具提供所有的标准ENVI的分类算法,加一个额外的算法称为“赢家通吃”。
12 水的相对深度模块(Relative Water Depth)从高光谱数据中快速获取感兴趣水域的水的相对深度信息影像。
操作流程如下:1.输入高光谱影像;2.大气校正,提供五种可供选择的方法(模糊减少,平均域,对数残差,IARR反射率,经验线性)。
如果没有特殊要求,在本流程中建议不执行该步骤,因为在水域的大气校正过程中,常常引起计算出来的相对水深数据效果不太令人满意,甚至异常。
3.选择计算水的相对深度的方法,有两种方法供选择:对数比例转换和主成分分析。
4.输出与水深度相关数据,并把结果加载到可用波段列表中。
13 波谱相似地物提取(Spectral Analogues)波谱相似地物提取模块从输入影像中提取与已知波谱信息地物类似的地物。
操作流程如下:1. 输入多光谱数据;2. 辐射校正,提供五种可供选择的方法(模糊减少,平均域,对数残差,IARR 反射率,经验线性);3. 选择用户感兴趣区域ROI ;4. 选择波谱处理方法,包括:MF、SAM 、MF/SAM 、归一化欧氏距离。
5. 输出突出了波谱相似地物的影像,并加载到可用波段列表中。
14 植被提取模块(SPEAR Vegetation Delineation)快捷容易地确定植被的存在情况,并用多光谱图像可视化该植被的活力水平。
植被指数NDVI提取模块操作流程如下:1. 输入文件;2. 辐射校正,提供五种可供选择的方法(模糊减少,平均域,对数残差,IARR 反射率,经验线性);也可以跳过这一步;3. 计算植被指数;4. 对植被指数结果数据利用颜色表附上颜色,也可以应用密度分割的方法对植被指数结果数据进行密度分割,保存结果。
15 去除竖条纹(Vertical Stripe Removal)在图像的同质区域可能会出现人为导致的垂直条带,这一区域的亮度与附近的亮度是不一样的。
这些人为地物使图像很难识别,它们会为图像的处理产生消极的影像。
当图像的背景是相对均匀(整个图像有一致的亮度水平)时,竖条纹删除工具去除工具比较好用。
由于它可以产生人为异常条带,所以在异构图像上(如含有明亮的土地和暗色水域的沿海图像),不推荐使用此工具。
16 船只提取模块(Watercraft Find er)船只提取模块,利用水和船的对比度以及船的纹理特征来提取船只信息。
操作流程如下:1.输入待处理文件;2.选择船只探测的处理方法,有两种方法供选择:texture based search 基于纹理的提取,该方法允许用户首先创建一个陆地和水的掩膜,然后用主成份分析的方法增强水和船的对比度,最后利用纹理特征提取船。