周立功单片机 ZLG9518S SPI转多串口
广州周立功单片机 ZLG500开发板 使用说明

ZLG500开发板使用说明详细资料随板赠送1 基本特征z 适用于对mifare读卡模块ZLG500A/B进行开发可通过跳线选择z 9V供电内部5V稳压电流约100毫安模块工作时z 可设置从机地址可以进行一对一RS232通信也可实现一对多的RS485主从通信ZLG500Az 提供PC机VC演示软件和动态链接库z 有蜂鸣器和发光二极管进行报警z 预留液晶显示器接口2 硬件描述一照片和接口说明通信接口8针RJ45接口设方形焊盘为第1脚然后呈S形依次管脚号递增管脚排列如下1+5V2GND3RS232-TXD4RS485+A5RS485-B6RS232-RXD二跳线设置在模块下面有两排跳线JP1和JP2通过不同的跳线组合能使开发板分别适用于A和B型模块1 A型跳线在这种情况下能进行一对一的RS232和一对多的RS485通信通过DIP开关可以设置从机地址如下图所示各个控制连接情况如下zlg500A: SCLK MCU的P1.6SDATA MCU的P1.5SS MCU的P3.2RST MCU的P1.4CTRL模块状态指示MS BZ蜂鸣器驱动MCU MCU的P1.7网络状态指示NS MCU的P3.7max485的23脚MCU的P3.0RXD max232的12脚MCU的P3.1TXD max232的10脚2B型跳线B型跳线分为两种B-P法和B-M法B-P为B型模块直接与PC机通过RS232接口连接跳线如下图所示各个控制连接情况如下zlg500B: CTRL模块状态指示MS BZ蜂鸣器驱动RST阻容复位CON485max485的23脚RXD max232的12脚TXD max232的10脚MCU未用B-M为B型模块与MCU连接此时max232及max485芯片将失去作用跳线如下图所示zlg500B: CTRL模块状态指示MS BZ蜂鸣器驱动RST MCU的P1.4CON485悬空RXD MCU的TXD P3.1TXD MCU的RXD P3.0MCU MCU的P1.7网络状态指示NS。
广州周立功单片机发展有限公司
W_RN
I 不控制写读:当该信号为高电平时,主机 CPU 将写 28L194 寄存器或发送 FIFO。
当该信号为低电平时,执行读操作。0=读;1=写。
DACKN
O 数据应答:低电平有效。该信号有效时,表明数据线上的最后一次传输已经完成。ຫໍສະໝຸດ 它是开漏输出,需要上拉器件。
IRQN
O 中断请求:低电平有效。该信号有效时,表明 28L194 申请中断。它是开漏输出,
SC28L194-电源电压为 3.3V 和 5V 的 4 路 UART 器件
描述
Philips 28L194 4 路 UART 是一款单片封装的 CMOS-LSI 通信器件,它提供了 4 路全双工异步通道,具 有 16 字节的 FIFO,使用用户定义的 Xon/Xoff 字符可实现自动带内(in-band)流控制,唤醒模式下可进行 地址识别。主机和 4 路 UART 之间的所有通信都使用同步总线接口。28L194 由 Philips 先进的 CMOS 技术 制造而成,使器件具有低成本、高密度和低功耗的优点。
管脚描述
助记符 类型 描述
SClk
I 主机系统时钟。用在主机接口的时间操作和时钟内部逻辑中。该信号的频率必须
大于 X1 最大频率的 2 倍、计数器/定时器和 TxC(1×)或 RxC(1×)输入的频率。
CEN
I 芯片选择信号:低电平有效。该信号有效时,允许主机 CPU 通过 I/O 口对 SC28L194
为了降低软件开销,器件包含的中断仲裁系统通过直接访问或修改中断向量的方法来报告中断 UART 的情况。报告的中断上下文包括通道编号、器件中断类型(接收器 COS 等)、发送器或接收器 FIFO 的填充 点。
SC28L194 提供了掉电模式,该模式下振荡器停振,但寄存器的内容保持不变。这将导致有几种不同的 低功耗模式。当工作电压为+5V 或+3.3V 时,SC28L194 完全兼容 TTL 电平。3.3V 或 5.0V 下 CMOS 接口 电平保持不变。
基于SPI接口的多机扩展和通信方法
基于SPI接口的多机扩展和通信方法摘要:SPI接口是一种广泛应用于各种嵌入式系统中的通信接口,其高效可靠的数据传输特性,不仅为单片机、传感器等小型设备的数据采集和控制提供了便捷的通信手段,同时也能满足多机协同工作所需的高速可靠数据传输。
针对多机扩展和通信需求,本文从硬件与软件两个方面出发,从多种实际应用场景出发,详细介绍了基于SPI接口的多机扩展和通信方法,包括单主-多从架构和多主-多从架构等方式,以及SPI总线传输中较为常见的数据通信协议。
本文旨在为广大嵌入式系统开发者提供一种有效的多机扩展和通信方案,支持各种物联网应用场景下的设备互联互通。
关键词:SPI接口;多机扩展;多机通信;总线传输;数据通信协议正文:一、引言随着物联网技术的快速发展,嵌入式系统的应用范围越来越广泛,从单一设备控制逐渐向多设备协同工作演进。
为了实现设备之间的数据传输和互联互通,多机之间的扩展和通信就成为了一种重要需求。
SPI接口作为一种比较常见的数据传输接口,不仅可以实现单一设备与主控器之间的高效通信,也可以支持多机之间的通信互联。
因此,本文将从SPI接口的应用特点出发,基于硬件设计和软件开发两个方面,详细介绍SPI接口在多机扩展和通信方面的应用方法。
二、SPI接口的使用场景SPI(Serial Peripheral Interface)接口是一种广泛应用于各种嵌入式系统中的通信接口,其主要特点是高速、简单和可靠。
SPI 接口通常由四条信号线组成,包括SCK、MOSI、MISO和SS 等。
其中,SCK信号线为时钟信号线,由主控发出,MOSI信号线为主控发出的数据信号线,MISO线为被控设备发出的数据信号线,SS信号线为从机选择信号线,由主控选择。
SPI接口在以下一些应用场景中得到了广泛的使用。
1. 单片机控制器:SPI接口被广泛用于单片机与其它外设(比如传感器、闪存、数据采集板等)的通信,以实现高效的数据传输和控制。
2. 数字信号处理器:SPI接口可用于数字信号处理器(DSP)或其它高性能处理器的跨主板通信。
ZLG8513S(SPI) TFT-LCD驱动器数据手册

4.3
区域更新 ................................................................................................................. 14
地址:北京市海淀区知春路 113 号银网中心 A 座 1207-1208 室 (中发电子市场斜对面) 电话:(010)62536178 62536179 82628073 传真:(010)82614433
重庆周立功
地址:重庆市石桥铺科园一路二号大西洋国际大厦 (赛格电子市场)1611 室 电话:(023)68796438 68796439 传真:(023)68796439
电话:(020) 22644383 22644384 邮箱:NXPARM@
iCAN 及数据采集:
电话:(020)28872344 22644373 邮箱:ican@
以太网:
电话:(020)22644380 22644385 邮箱:ethernet.support@
————————————产品应用
● 广告机; ● 电梯外呼板; ● 医疗器件; ● 汽车仪表。
—————————————订购信息
型号 ZLG8513S
温度范围 -40°C ~ +85°C
封装 TQ128
————————————————————————————————典型应用
广州周立功单片机科技有限公司
3.5
区域拷贝 ................................................................................................................... 9
单片机中SPI接口的工作原理与应用案例

单片机中SPI接口的工作原理与应用案例一、工作原理SPI(Serial Peripheral Interface)是一种同步的串行通信接口协议,常用于单片机和外围设备之间进行数据传输。
它由一个主设备和一个或多个从设备组成,可以同时控制多个从设备。
SPI接口通过四个信号线进行通信:时钟线(SCLK)、主设备输出从设备输入线(MOSI)、主设备输入从设备输出线(MISO)、片选线(SS)。
工作时,主设备驱动时钟线发送时钟信号,从而控制数据传输的时序。
主设备通过MOSI线发送数据到从设备,从设备通过MISO线返回数据给主设备。
片选线用于选择哪个从设备与主设备进行通信,可以通过使能或禁用相应的从设备。
SPI通信的数据传输方式有两种:全双工和半双工。
全双工允许主设备和从设备同时发送和接收数据,而半双工只允许主设备和从设备交替进行数据传输。
SPI 接口的工作速率可以根据应用需求进行调整。
在SPI接口中,主设备控制时钟的频率,从设备根据时钟频率进行数据读取和传输。
二、应用案例1. 存储器扩展模块一个常见的应用案例是在单片机系统中使用SPI接口来扩展存储器容量。
通过连接一块外部存储器,可以实现对大容量数据的读写操作。
主设备通过SPI接口发送读写指令和地址信息,从设备接收指定地址的数据,并将数据返回给主设备。
通过这种方式,可以轻松扩展单片机的存储容量。
2. 传感器数据采集模块SPI接口广泛应用于传感器数据采集模块。
传感器作为从设备连接到单片机系统,通过SPI接口将采集到的数据传输给主设备。
主设备可以根据需要发送控制命令到从设备,从而实现对传感器的配置和采集频率等参数的调整。
例如,温度传感器可以通过SPI接口将采集到的温度数据传输给单片机系统,从而实现实时温度监测。
其他类型的传感器,如加速度传感器、压力传感器等,也可以通过SPI接口与单片机进行数据交换,实现对环境参数的监测和控制。
3. 外部显示模块SPI接口还常被用于连接外部显示模块,如液晶显示屏(LCD)。
广州周立功单片机 EasyUDisk 说明书 v1.0

目录第1章 EasyUDisk使用手册v1.0 (1)1.1 概述 (1)1.2 硬件连接 (1)1.3 通讯协议 (2)1.4 功能代码 (3)1.4.1 查询系统状态 (3)1.4.2 系统设置 (4)1.4.3 打开文件 (5)1.4.4 关闭文件 (6)1.4.5 写文件 (6)1.4.6 读文件 (7)1.4.7 移动指针 (8)1.4.8 创建目录 (9)第1章 EasyUDisk使用手册v1.01.1 概述U盘作为数据的载体目前已广泛应用于嵌入式行业,而某些电子产品在国家标准中已成了强制性的要求。
在嵌入式的电子产品中实现对U盘文件的读写,成了许多厂家的技术攻关的难题。
优盘伴侣EasyUDisk读写U盘模块就可以轻易解决以上问题,它是低端单片机操作U盘的最佳伴侣。
EasyUDisk模块采用PHILIP公司工业级USB主控芯片ISP1160和ARM7微处理器LPC2132,整个模块以工业级标准设计。
模块提供了通用RS232串口与用户系统连接, 使普通的单片机也可以轻易实现对U盘的操作。
EasyUDisk模块适用于仪器仪表、门禁系统、汽车黑匣子和税控机等对存贮速度要求不高的设备中使用。
模块特性:全面支持大容量存储协议,真正支持所有非加密U盘。
支持Bulk-Only传输协议和CIB-Only传输协议。
支持FAT12、FAT16和FAT32文件管理系统。
提供标准C语言驱动源程序,适用所有单片机系统。
提供RS232电平接口,内部提供TTL电平接口。
支持4800~115200 bps标准波特率,上电后默认波特率为9600 bps。
1.2 硬件连接电源适配器输入: 9V直流,400 mA极性:串口连接DB-9 的2针为模块的TXD;3针为模块的RXD;5针为模块的GND。
LED状态指示绿色闪亮:待机状态,这时没有U盘插入;绿色长亮:准备就绪,这时U盘已插入;红色点亮:文件已打开,禁止拔出U盘;红色熄灭:文件已关闭,可安全拔出U盘。
基于SPI互连的多串口系统

机 的 总和 。此 外 . 介 绍 了数 据 交换 协 议 、 储 器 的 组 织 、 件 结 构 等 。 还 存 软
SI P 系统 中的 单 片机 以“ 主一 多从 ” 构 进 行 S I 线 互 连 , 机 与从 机 通 过 S I 式 交 换 信 息 和 数 据 , 个 从 机 的 单 结 P 总 主 P 方 每
串 口可 以 连接 1个 外 部 串 口设 备 并 交换 数 据 。 时 主机 的 串 口可 与 上 位 计 算 机 相 连 , 而 实现 上位 计 算 机 通 过 该 系 同 从
p cs r S C1C 4 0 D w ihhdb t U R dS IT oepoesr i ti ss m cm u i t s  ̄ at - o r ess T 2 5 1A hc a h A Ta P. hs rcsosn hs yt o m nc e i i em e o o n e a d n“ n s r
第 l 8卷 第 l 期 2
Vo .8 1 1 No 1 .2
电子设计 工 程
Elc r n c De in En i e r g e t i sg gn e i o n
21 0 0年 1 2月
De .2 0 c 01
基才 S I P 互连的多串口系统
胡立群 。陈敦 军
H i u , HE u - n U L- n C N D nj q u
( e aoa r d acdP o n n lc o i Ma r l, col Eet n c neadE gnei , K yLb rt yo vn e h t i adEe t n t is Sho o lc o i Si c n nier g o fA oc r c ea f r c e n
单片机spi通信原理详解
单片机是一个可编程的微控制器,和spi通信其实是两个独立的东西。
只不过我们用单片机可以去实现spi通信而已,但是实现spi通信不一定非要单片机。
我们人和人之间沟通,要靠说话,并且两个人语言要一样,比如说都用普通话。
那芯片和芯片沟通,它们又不会说话,怎么传递信息呢?就是通过通信总线,通信总线有很多种,比如IIC、SPI、USART、CAN,它们的区别就像普通话、英语、韩语、俄语,都是用来传递信息用的,只是传递方式不同。
但传递信息,有一个前提,就是语言要相同,也就是通信方式要相同。
所以说,spi是一种通信方式,是用来传递信息的。
不同的通信方式,传递信息的方式不同。
Spi是一种全双工、高速的、同步的通信总线。
简单来说,就是你们两个可以同时快速地说话,你能把你要说的告诉对方,同时也能听到对方说什么,这就是全双工。
还有一种叫半双工,就是你们同时只能有一个人说,另一个听,说完了,另外一个才能说。
很明显,全双工传递信息的效率更高吧。
同步的意思我给你们两个对话设定个条件,比如说我说开始你们才可以对话,我说停止就都不能说话。
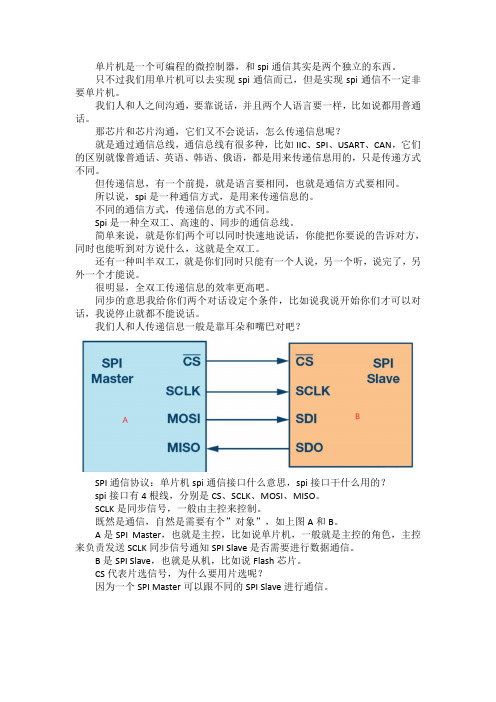
我们人和人传递信息一般是靠耳朵和嘴巴对吧?SPI通信协议:单片机spi通信接口什么意思,spi接口干什么用的?spi接口有4根线,分别是CS、SCLK、MOSI、MISO。
SCLK是同步信号,一般由主控来控制。
既然是通信,自然是需要有个”对象”,如上图A和B。
A是SPI Master,也就是主控,比如说单片机,一般就是主控的角色,主控来负责发送SCLK同步信号通知SPI Slave是否需要进行数据通信。
B是SPI Slave,也就是从机,比如说Flash芯片。
CS代表片选信号,为什么要用片选呢?因为一个SPI Master可以跟不同的SPI Slave进行通信。
SPI Master就是通过CS来控制,具体跟哪个SPI Slave通讯,控制CS为低电平就代表选中该SPI Slave。
如果说只跟一个从设备通讯,也可以直接把CS串联电阻接地,省的每次都去控制它。
周立功:深入浅出AMetal谈SPI总线和IIC总线

周立功:深入浅出AMetal谈SPI总线和IIC总线周立功:深入浅出AMetal谈SPI总线和IIC 总线第五章为深入浅出AMetal,本文内容为5.5 S5.5 SPI 总线>>> 5.5.1 初始化>>>5.5.2 接口函数1.从机实例初始化2.设置从机实例3.传输初始化4.消息初始化5.在消息中添加传输6.启动SPI 消息处理7.先写后读8.连续两次写>>> 5.5.3 SPI 扩展接口数据宽度:74HC595 只有8 个并行输出口,因此每次传输的数据宽度为8 位。
SPI 模式:8 位数据是在CP 时钟信号上升沿作用下依次送入74HC595 的,因此在空闲时对时钟没有要求。
如果选择空闲时钟极性为低电平(CPOL=0),则必须在第一个时钟边沿(上升沿)采样数据(CPHA=0),即模式0。
反之,如果选择空闲时钟极性为高电平(CPOL=1),则必须在第二个时钟边沿(上升沿)采样数据(CPHA=1),即模式3。
因此选择模式0 和模式3 均可,后续的程序选择模式3 作为范例。
最高时钟频率:虽然74HC595 最高时钟频率高达100MHz,但MCU 最高主频只有30MHz,因此最高时钟频率设置为一个相对合理的范围,比如,3000000Hz(3MHz)。
片选引脚:片选引脚为PIO0_13。
5.6 I2C 总线>>> 5.6.1 初始化>>> 5.6.2 接口函数1.从机实例初始化2.写操作3.读操作>>> 5.6.3 I2C 扩展接口在使用am_i2c_read()函数前,需要先使用am_i2c_mkdev()初始化与LM75B 对应的I2C从机实例,便于LPC824 读取温度值。
初始化从机实例时,还需要知道两个重要的信息:器件从机地址和实例属性。
LM75B 的从机地址为7 位,1001xxx,其中地址位0~2 分别与硬件连接的A0~A2 一一对应。
广州周立功单片机 DP 51S 单片机仿真实验仪 说明书

DP51S单片机仿真实验仪DP51S单片机仿真实验仪是由广州致远电子有限公司设计的DP系列下载仿真实验仪之一是一种功能强大的单片机应用技术学习调试开发工具为初学者学生进入单片机应用设计领域铺造了一条捷径特别适合于中专大专高等职业技术学院的单片机教学DP51S单片机仿真实验仪向用户提供了众多外围器件和设备接口可使用户快速掌握单片机原理及其实用接口技术同时预留的ISP接口使DP51S单片机仿真实验仪还具有ISP编程器的功能1. 参考照片2. 功能特点(1) 用户可使用自带的P87C52X2单片机来进行仿真调试相应的单片机用户程序也可以选配具有ISP 功能的P89C6xX2P89C51RX2P89C66x单片机作为目标MCU且工作晶振频率可选112 MHz(2) 板上集成众多常用接口电路32K SRAM芯片62C2563个独立LED显示3个独立按键6个8段数码管与8按键组成的键盘/显示电路I2C接口实时时钟芯片PCF8563T I2C接口E2PROM芯片24WC02RS232串行通讯接口芯片MAX232串行显示2个8段数码管电路8位并行D/A转换电路DAC08328位并行A/D转换电路ADC0809字符液晶显示屏接口无源蜂鸣器电路BUZZER红外接收电路RFIN 阻容复位电路电源监控电路MAX810这些实用接口电路涵盖了MCU的各个应用领域能够提供用户领先的应用设计方法(3) 电路信号的切换通过跳线器进行选择可靠性高使用方便(4) 提供实验电路的各部分原理图提供各个实验课题的汇编程序A51源代码浅显易懂入门方便使用户快速掌握应用系统的设计方法(5) 预留ISP接口支持PHILIPS ISP单片机(如P89C51RX2P89C66x P89C6xX2等)的ISP编程(6) 通过MON51接口与Keil C51调试软件µVision2配合可按单步断点连续等方式调试实际应用程序(7) 进行实时操作系统的学习如RTX Tiny 实时操作系统uC/OS II实时操作系统Small RTOS实时操作系统等RTX Tiny 实时操作系统是德国Keil Software公司设计的关于Small RTOS实时操作系统的源码可以在网站下载至于其详细的设计思想应用设计实例和中间件请参考基于80C51单片机的Small RTOS操作系统的设计原理及其应用专著有了这样的基础您就有了从8位单片机过渡到32位ARM的扎实功底如果您的基础比较好还可以深入学习uC/OS II实时操作系统不仅可以在80C51单片机上使用而且可以十分方便地移植到32位ARM上使用(8) 利用DP51下载仿真实验仪引出的CPU信号可以连接自己的实际应用系统(9) 提供完整的傻瓜化I2C软件包RS232通信软件包3. 实验课题DP51S单片机仿真实验仪集成有强大的软件硬件资源可向使用者提供多种实验课题(1) 学习80C52单片机在Keil uVision2调试环境下进行80C52硬件仿真实验定时器实验等(2) 设有3位独立按键3个独立LED实现IO接口实验中断实验等(3) 设有6个8段数码管8个按键按动态扫描方式进行控制实现键盘/显示实验(4) 通过全译码电路扩展32K RAM作为XDA TA空间实现存贮器实验(5) 串口扩展RS232通讯电路实现PC通讯实验(6) 两台或多台DP51S的串口相连实现单片机的主/从通讯网络实验(7) 串口扩展2个8段数码管显示电路实现串行方式0扩展接口实验(8) 扩展I2C接口的E2PROM芯片24WC02实现I2C接口实验(9) 扩展I2C接口的实时时钟芯片PCF8563实现时钟实验(10)扩展8位并行D/A转换电路DAC0832实现各类D/A转换实验(11)扩展8位并行A/D转换电路ADC0809实现各类A/D转换实验(12)扩展字符液晶显示屏接口提供16*2字符液晶屏实现液晶显示实验(13)扩展1个无源蜂鸣器BUZZER实现音乐输出PWM输出实验(14)扩展1套红外接收电路RFIN实现定时器捕获信号采样实验(15)合理分配DP51S的部分硬件资源模拟实际运行目标实现MCU大型综合实验。
基于STM32+ZLG9518S设计的串口服务器
基于STM32+ZLG9518S设计的串口服务器
潘玉峰
【期刊名称】《电子技术与软件工程》
【年(卷),期】2015(000)020
【摘要】本文介绍了采用周立功的多串口芯片ZLG9518S与STM32F103RX控制器设计的串口服务器,实现24路串口通信,应用于智能电能表生产的通信测试。
本文给出了接口设计原理图和程序处理流程。
【总页数】1页(P129-129)
【作者】潘玉峰
【作者单位】龚洁武汉盛帆电子股份有限公司,湖北省武汉市430200
【正文语种】中文
【中图分类】TP336
【相关文献】
1.基于W5500的串口服务器设计及物联网应用 [J], 罗毅
2.一种基于Zynq的多功能串口服务器设计 [J], 姜海卫;郭兰图;苟晓鸣;张跃宝;
3.基于Linux系统的串口服务器设计与实现 [J], 包坤; 高月; 陈继鑫; 赖晋科
4.基于Zynq的16路串口服务器设计 [J], 王朋涛;孟海成;明奇
5.基于Zynq的16路串口服务器设计 [J], 王朋涛;孟海成;明奇
因版权原因,仅展示原文概要,查看原文内容请购买。
[通信电子]把单片机串口通讯改造为SPI通讯接口
![[通信电子]把单片机串口通讯改造为SPI通讯接口](https://img.taocdn.com/s3/m/04d6590a58eef8c75fbfc77da26925c52cc5919d.png)
单片机与可编程器件在嵌入式单片机应用系统中一般都有标准串行端口UART(通用异步接收和发送器),而UART通常专门用于单机或多机异步通信,不再有其它应用。
在系统引脚严重不足时,就有必要进行某些功能接口的扩展。
本文介绍在已将UART作为串行通信端口的情况下,采用UART方式0分时复用策略来扩展SPI(SerialPeripheral Interface—串行外设接口)的方法。
该方法已成功应用于嵌入式数据记录仪中,效果良好,经济实用。
1.概述SPI是嵌入式系统应用中非常广泛的接口标准,许多器件厂家都使用该标准,主要是因为SPI使用处理器引脚少,传输速度快,同一SPI总线上可挂接多个SPI接口等。
目前应用较多的内置SPI的器件有A/D、D/A、数字电位器、串行EEPROM、键盘/显示模块、时钟、外部看门狗等。
因此在缺少引脚的情况下,充分利用已经使用的UART引脚来扩展SPI是一种既经济又方便的接口扩展方法。
通用串行异步通信接口(UART)可工作在四种方式,其中方式0为移位寄存器方式,其它三种方式为串行异步通信方式,可用于全双工或半双工或单工串行异步通信,P3.0作为串行输入RXD,P3.1作为串行输出TXD。
方式1常用于双机通信,方式2、3一般用于多机通信。
多机通信现常采用RS485接口标准,它是采用差分传输方式进行通信的,抗干扰强,传输距离远。
双机通信一般使用RS232接口标准。
2.扩展原理串行异步通信接口工作方式0(移位寄存器方式)为移位式的数据传输,其波特率固定为fosc/12,fosc是单片机时钟频率。
TXD作为移位同步时钟,RXD作为数据输入/输出信号。
方式0进行数据传输时,无论输入还是输出,均由TXD引脚提供移位同步时钟,数据在RXD线上移入或移出。
而SPI总线恰恰也是以时钟信号SCK为同步脉冲,在SI和SO线上将数据移入和移出的。
因此,借助于UART的方式0进行SPI模拟操作,采用I/O口P1.1来控制不同数据通路,就可以分时利用RXD和TXD引脚来扩展SPI通信。
ZLG9518S Demo演示方法
1. ZLG9518S Demo测试方法
1.1 准备工作
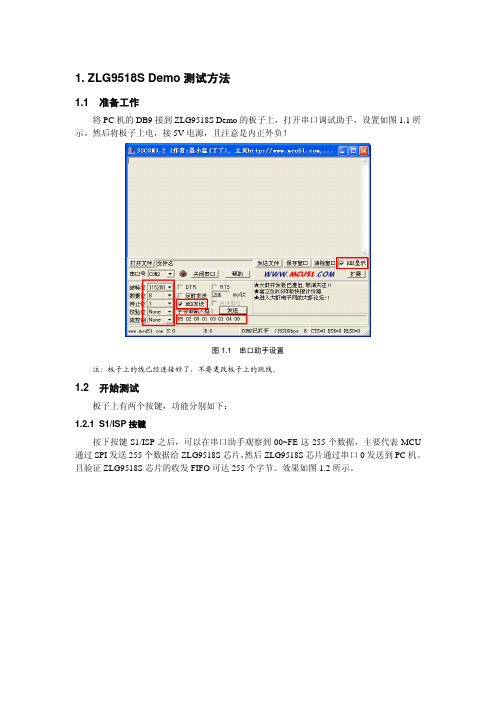
将PC机的DB9接到ZLG9518S Demo的板子上,打开串口调试助手,设置如图1.1所示。
然后将板子上电,接5V电源,且注意是内正外负!
图1.1 串口助手设置
注:板子上的线已经连接好了,不要更改板子上的跳线。
1.2 开始测试
板子上有两个按键,功能分别如下:
1.2.1 S1/ISP按键
按下按键S1/ISP之后,可以在串口助手观察到00~FE这255个数据,主要代表MCU 通过SPI发送255个数据给ZLG9518S芯片,然后ZLG9518S芯片通过串口0发送到PC机。
且验证ZLG9518S芯片的收发FIFO可达255个字节。
效果如图1.2所示。
图1.2 S1按键效果
1.2.2 S2/KEY
按下按键S2/KEY之后,可以在串口助手观察到9个数据,主要代表MCU通过SPI读取ZLG9518S芯片的内部寄存器,然后再将这些通过SPI发送给ZLG9518S芯片,ZLG9518S 芯片再通过串口0发送给PC进行显示。
具体ZLG9518S芯片内部有哪些寄存器,或者其寄存器代表什么含义,这里暂不介绍,后续会发布ZLG9518S芯片的数据手册。
效果如图1.3所示。
图1.3 S2按键效果
1.3 大量数据测试
可以通过PC机发送一串协议给MCU,然后MCU验证通过该协议之后,通过SPI发送
大量数据给ZLG9518S芯片,ZLG9518S芯片再通过串口0将数据发送给PC进行显示,PC 每发送一次协议,ZLG9518S芯片就会连续发送1024个字节给PC进行显示。
效果如图1.4所示。
图1.4 PC发协议显示。
周立功网络模块ZNE-100转串口

ZNE-100 嵌入式以太网转串口模块以太网从出现至今已经三十多年了。
由于它的性能价格比高,容易普及使用,在我国绝大部分的局域网都采用以太网技术。
目前全球企事业用户的90%以上都采用以太网接入,已成为企事业用户的主导接入方式。
采用以太网作为企事业用户接入手段的主要原因是已有巨大的网络基础和长期的经验知识、目前所有流行的操作系统和应用也都是与以太网兼容的。
而在嵌入式应用中,如果一个嵌入式系统没有以太网接口,其价值将大打折扣。
ZNE-100是周立功公司开发的一款嵌入式以太网模块,它内部集成了TCP/IP协议栈,用户利于它可以轻松完成嵌入式设备的网络功能,节省人力物力和开发时间,使产品更快的投入市场,增强竞争力。
参考图片:ZNE-100模块ZNE评估板功能特点:z Serial(TTL) to 10M Ethernet,Serial最大波特率为115200 bps,支持RS232、RS485、RS422等规范;z可利用Web browser和Windows utility 轻松进行设定;z TCP Server、 UDP Server、 Real COM driver作业模式;z支持动态(DHCP),或静态获取IP地址;z尺寸小(44.5×31.7mm)。
产品特性:z 10M以太网接口(使用排针方式引出),1.5KV 电磁隔离;z串口TTL电平方式,波特率300~115200 bps;z串口任意校验模式,数据位5,6,7,8可设定,串口停止位1,2位可设定;z支持TCP/IP协议包括:ETHERNET、ARP、IP、ICMP、UDP、TCP、HTTP、DHCP;z工作方式可选择为TCP Server或 UDP Server,工作端口可设定;z可使用配置工具ZnetCom Utility for Windows98/me/NT/2000/XP进行配置;z可使用网页浏览器进行配置;z输入电压DC 5V,功耗低,最大工作电流 38 mA (0.2W超低功耗);z工作温度0~65℃;保存温度-25~85℃。
【ZLG微信文档精选】那些你不知道的SPI秘密
广州周立功单片机科技有限公司那些你不知道的SPI 秘密那些你不知道的SPI秘密摘要:作为电子工程师的你对SPI了解多少呢?是不是在使用它的时候遇到了各种奇葩的问题?那些你不知道的SPI的秘密,或许能解您燃眉之急。
推送目的:技术分享是否原创:是关键字:嵌入式、SPI、片选信号正文:在嵌入式数字通信领域,我们随处可见SPI(Serial Peripheral Interface)的身影,SPI 是一种同步串行通信接口,用于处理器和外围扩展芯片之间的串行连接,现在已经发展成为一种工业标准。
但是作为电子工程师的你对它们又了解多少呢?是不是在使用它的时候遇到了各种奇葩的问题?现在就来看一下那些你不知道的SPI的秘密吧。
我们都用过51单片机模拟过SPI吧,相信大家肯定都能正常的通信了。
典型的51单片机模拟SPI时序如程序清单1所示。
程序清单1 51单片机模拟SPI时序void hc595Write (INT8U dat){INT8U i; /* 循环控制变量*/ for(i = 0 ; i < 8; i++) {if (dat & 0x80) { /* 高位在前,低位在后*/ HC595_DA T = 1;}else {HC595_DA T = 0;}dat <<= 1; /* 左移1位*/HC595_CLK = 1; /* 时钟上边沿采样数据*/HC595_CLK = 0; /* 空闲时刻,时钟线拉低*/ }HC595_CS = 1; /* 片选信号拉高*/ HC595_CS = 0; /* 片选信号拉低*/ }上面这个程序是完全没有问题,所有的I/O口也都是按照先后顺序依次操作的,所以只要我们了解时序,是很容易写正确的。
但是现在已经进入32位机的时代了,大部分MCU 都有SPI外设,这样我们再也不用模拟繁琐的时序了,大大方便了我们的编程。
现在我们就用飞思卡尔的FRDM-KL25Z开发平台写一段SPI操作74HC595的程序。
周立功单片机 XMOS方案介绍 USB Audio TFT 多串口
广州周立功单片机科技有限公司XMOS 方案简介XMOS 方案修订历史目录1. XS1-L1 USB Audio 2.0方案简介 (1)1.1USB Audio Device简介 (1)1.2方案概述 (1)1.3功能特点 (1)1.4硬件资源 (2)1.5软件资源 (2)1.6使用方法 (2)1.7应用范围 (3)2. XS1-L2 USB Audio 2.0 Multichannel方案简介 (4)2.1方案概述 (4)2.2功能特点 (4)2.3硬件资源 (5)2.4软件资源 (5)2.5使用方法 (6)2.6应用范围 (6)3. XS1-L2 A VB Audio端点设备方案简介 (7)3.1方案概述 (7)3.2功能特点 (7)3.3硬件资源 (8)3.4软件资源 (8)3.5使用方法 (9)3.6应用范围 (9)4. TFT液晶驱动专用IC——MTX110E16-TQ128 (10)4.1芯片概述 (10)4.2芯片功能特点 (10)4.3软件资源 (11)4.4应用范围 (11)5. Serial to Ethernet Bridging桥接器方案简介 (12)5.1方案概述 (12)5.2功能特点 (12)5.3硬件资源 (13)5.4软件资源 (13)5.5使用方法 (13)5.6应用场合 (18)1. XS1-L1 USB Audio2.0方案简介1.1 USB Audio Device简介USB Audio Device 顾名思义就是一个带有USB接口的音频设备。
可以理解为一个USB 接口的声卡。
USB Audio Device通过USB接口把音响设备连接到计算机上。
实现了即插即拔的声卡设备,更方便更实用。
1.2 方案概述XS1-L1 USB Audio 2.0解决方案,是基于XMOS产品的单核芯片XS1-L1设计出来的一个USB音频设备驱动卡的解决方案。
该方案使用了高速USB2.0标准接口,高达480Mb/s 的传输速率。
标准串口参考程序c-来源周立功单片机公司

标准串口参考程序如下:(来源周立功单片机公司)具有一般参考意义。
#include<reg51.h>unsigned char UART_RX; //定义串口接收数据变量unsigned char RX_flag; //定义穿行接收标记/**************************************************************************************** *****函数名:UART串口初始化函数调用:UART_init();参数:无返回值:无结果:启动UART串口接收中断,允许串口接收,启动T/C1产生波特率(占用)备注:振荡晶体为12MHz,PC串口端设置[ 4800,8,无,1,无]/**************************************************************************************** ******/void UART_init (void){EA = 1; //允许总中断(如不使用中断,可用//屏蔽)ES = 1; //允许UART串口的中断TMOD = 0x20; //定时器T/C1工作方式2SCON = 0x50; //串口工作方式1,允许串口接收(SCON = 0x40 时禁止串口接收)TH1 = 0xF3; //定时器初值高8位设置TL1 = 0xF3; //定时器初值低8位设置PCON = 0x80; //波特率倍频(屏蔽本句波特率为2400)TR1 = 1; //定时器启动}/**************************************************************************************** ******//**************************************************************************************** *****函数名:UART串口接收中断处理函数调用:[SBUF收到数据后中断处理]参数:无返回值:无结果:UART串口接收到数据时产生中断,用户对数据进行处理(并发送回去)备注:过长的处理程序会影响后面数据的接收/**************************************************************************************** ******/void UART_R (void) interrupt 4 using 1{ //切换寄存器组到1RI = 0; //令接收中断标志位为0(软件清零)UART_RX = SBUF; //将接收到的数据送入变量UART_dataRX_flag=1; //标记接收//用户函数内容(用户可使用UART_data做数据处理)//SBUF = UART_data; //将接收的数据发送回去(删除//即生效)//while(TI == 0); //检查发送中断标志位//TI = 0; //令发送中断标志位为0(软件清零)}/**************************************************************************************** ******//**************************************************************************************** *****函数名:UART串口发送函数调用:UART_T (?);参数:需要UART串口发送的数据(8位/1字节)返回值:无结果:将参数中的数据发送给UART串口,确认发送完成后退出,采用非中断方式备注:/**************************************************************************************** ******/void UART_T (unsigned char UART_data){ //定义串口发送数据变量ES=0; //禁止穿行中断SBUF = UART_data; //将接收的数据发送回去while(TI == 0); //检查发送中断标志位TI = 0; //令发送中断标志位为0(软件清零)ES=1; //打开穿行中断}/**************************************************************************************** *****函数名:UART串口发送字符串函数调用:UART_S (?);参数:需要UART串口发送的数据(8位/1字节)返回值:无结果:将参数中的数据发送给UART串口,确认发送完成后退出,采用非中断方式备注:/**************************************************************************************** ******/void UART_S(unsigned char *str){while(1){if(*str=='\0') break;UART_T(*str++);}}/**************************************************************************************** *****函数名:主函数调用:main();参数:返回值:无结果:备注:/**************************************************************************************** ******/void main(){unsigned char Buf_data[]={" welcome to MCU world. \n\r"}; UART_init();UART_S(Buf_data);while(1){if(RX_flag==1){UART_T(UART_RX);RX_flag=0;}}}///////////////////////////////////////////////////////////////////个人认为普通单片机在通信频率上及不上AVR单片机,更可能使用USB转串口工具进行开发,所以串口波特率不能过高,最好是2400或4800。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
——————————————概述ZLG9518S 芯片是广州周立功单片机科技有限公司针对多串口应用而设计的一款专用IC ,也是一款将高速SPI 转换为8路低速UART 的接口转换芯片;ZLG9518S 芯片在串口数量上支持动态配置,最高可支持8个串口;串口与串口之间的资源不共享,每个串口在物理上都是绝对独立的;8个串口都可动态配置,支持8种波特率、5种校验方式、4种数据长度、3种停止位等;每个串口都支持可选的硬件流控功能,用户可以根据需要开启或者关闭硬件流控功能;除此之外,ZLG9518S 芯片还提供了丰富的寄存器,包括可选的中断功能、中断模式、错误状态查询等;SPI 时钟最高可达33M ,且SPI 协议非常简单。
ZLG9518S 芯片满足目前大部分多串口应用场合,大大缩短产品的研发周期,提高产品的可靠性和稳定性。
——————————————产品特性◆支持1~8路串口可动态扩展; ◆ 8路串口在物理上绝对独立;◆ 串口的收、发缓存独立,高达255bytes ; ◆ 支持8种波特率,最高可达115200bps ; ◆ 支持5种校验方式; ◆ 支持4种数据长度; ◆ 支持3种停止位;◆ 支持可选的硬件流控功能; ◆ 支持RTS 和CTS 单独使用; ◆ 支持多种流控触发点配置;◆ 支持可选的中断功能、中断模式等; ◆ 支持多种中断触发点配置;◆ 支持错误状态查询和错误中断等; ◆ SPI 时钟最高可达33MHz ;◆ SPI 支持模式3,协议简单易懂;◆ 内设多个寄存器,且寄存器精简易用; ◆温度范围-40~85o C 。
————————————产品应用● 集散控制系统; ● 数据采集系统; ● 行车记录仪; ● 串口屏。
ZLG9518S多串口专用IC广州周立功单片机科技有限公司————————————————————————————————典型应用目录1. 功能简介 (1)2. 引脚描述 (2)3. 功能描述 (4)3.1 复位FIFO (4)3.2 串口配置 (1)3.3 流控功能 (1)3.4 中断功能 (1)3.4.1 FIFO中断 (2)3.4.2 流控中断 (2)3.4.3 错误中断 (3)3.5 检错功能 (3)3.5.1 FIFO溢出错误 (3)3.5.2 校验/帧错误 (3)3.5.3 命令/参数错误 (4)3.5.4 读错误 (4)3.6 RXLVL和TXLVL (4)3.7 写FIFO (4)3.8 读FIFO (4)4. SPI接口协议 (5)4.1 协议 (5)4.2 写时序 (6)4.3 读时序 (6)5. 操作说明 (8)5.1 初始化配置 (8)5.2 写/读命令 (9)5.2.1 写命令 (10)5.2.2 读命令 (11)5.3 硬件流控 (12)5.4 中断处理 (13)6. 免责声明 (16)1. 功能简介ZLG9518S芯片是一款SPI转多路串口的专用IC,该芯片支持将高达33MHz的SPI接口转换为8路波特率低达4800bps的串口,实现了高低速接口之间的无缝连接。
ZLG9518S芯片在串口的数量上支持动态配置,即用户可以任意使用其中的一个或者多个串口,可随时打开或者关闭任意串口;任意两个串口之间的资源是不共享的,无论是收发缓存,还是外部端口,在物理上都是绝对独立的;每个串口都可以支持多种动态配置,如8种波特率、5种校验方式、4种数据长度、3种停止位等,且都支持RTS和CTS的流控功能,用户可以根据自己的需要,使能或禁能任意一路或者多路的串口流控功能,甚至可以单独使能RTS功能或者CTS功能等;ZLG9518S芯片还支持中断,且有一个外部中断引脚IRQ,由于8路串口共享IRQ引脚,因此只要有任意1路串口满足产生中断的条件,IRQ引脚即输出中断信号,中断支持多种模式,比如FIFO中断、流控中断和错误中断等,且这些中断都可以根据自己需要任意启动或关闭;ZLG9518S芯片还具有检错的能力,当在通讯中产生错误时,用户可以通过查询相应的寄存器来得知产生错误的类别,且可以自由设置产生错误之后是否发送中断信号等。
ZLG9518S芯片的内部结构如图1.1所示。
图1.1 芯片内部框图2. 引脚描述ZLG9518S 芯片的管脚如图2.1所示。
图2.1 ZLG9518S 芯片引脚图具体管脚说明如表2.1所示。
表2.1 ZLG9518S 芯片管脚说明3. 功能描述ZLG9518S芯片的所有功能都是通过寄存器来实现的,MCU可以通过SPI接口任意修改和访问ZLG9518S芯片的寄存器。
MCU可以在ZLG9518S芯片的工作过程中,复位ZLG9518S芯片的FIFO、开启或关闭任意一个串口、配置任意一个串口的波特率、停止位、校验方式、数据长度等、开启或关闭任意一个串口的流控功能、配置任意一个串口的中断模式和中断使能等。
ZLG9518S芯片内部共有11个寄存器,且每个寄存器都是8位的,如表3.1所示。
表3.1 ZLG9518S芯片的寄存器说明注:其中没有用到的地址均为保留位,主要是方便以后的功能扩展。
ZLG9518S芯片支持4线的SPI接口,方便与外部的MCU进行通信,如图3.1所示。
ZLG9518S芯片将内部的复杂运算逻辑简化为如表3.1所示的11个寄存器,使得外部MCU对ZLG9518S芯片的操作变得简单,可将ZLG9518S图3.1 MCU与ZLG9518S芯片的连接芯片当成外设来访问。
除此之外,ZLG9518S芯片还有一个IRQ中断引脚,这使得MCU可以更加实时和高效的了解ZLG9518S 芯片的当前工作状态,以便于及时处理和调整。
3.1 复位FIFOMCU可以在ZLG9518S芯片的工作过程中,复位其串口的发送或者接收FIFO,使得FIFO恢复到初始状态。
相比重新复位ZLG9518S芯片而言,MCU可以省略重新配置串口参数的步骤。
具体操作是在FCR寄存器中,在对应的位上置1将自动复位一次FIFO,复位之后ZLG9518S芯片继续正常工作,此时该位不会自动清零,需由用户手动清零该位。
如果该位不清零,ZLG9518S芯片也不会一直处于复位状态。
ZLG9518S芯片的FIFO复位动作,只对当前写入的复位FIFO命令执行一趟复位。
FCR寄存器详细参数如表3.2所示。
表3.2 FCR寄存器(地址为0)3.2 串口配置ZLG9518S芯片的串口支持动态配置,MCU可以在ZLG9518S芯片的工作过程中,对任意一个串口进行配置,如波特率、数据长度、校验方式、停止位等。
具体配置方法是,将所需的参数写入到LCR0和LCR1寄存器中,LCR0和LCR1寄存器的详细参数如表3.3和表3.4所示。
表3.3 LCR0寄存器(地址为1)表3.4 LCR1寄存器(地址为2)LCR0和LCR1寄存器中具体相关的位所代表的含义如表3.5至表3.9所示。
表3.5 LCR0寄存器的停止位表3.6 LCR0寄存器的状态位表3.7 LCR0寄存器的数据长度位表3.8 LCR0寄存器的校验位表3.9 LCR1寄存器的波特率位注:当写入的的参数错误时,ZLG9518S芯片将会在错误寄存器中提示此时的参数输入错误,且此时不会将该参数赋值给寄存器。
3.3 流控功能ZLG9518S芯片支持硬件流控RTS和CTS功能,其主要作用是为了在串口进行大量数据传输时,防止数据丢失。
用户可以根据自己的应用场合,开启或者关闭流控功能。
当关闭流控功能时,RTS输出低电平,表示始终允许对方发送了数据;当开启流控功能时,RTS 会自动根据串口的接收缓存进行电平控制,而MCU只管通过SPI接口从ZLG9518S芯片发送或读取FIFO的数据即可。
开启和关闭RTS和CTS功能主要是通过LCR1寄存器的bit3和bit4来实现的,具体如表3.4所示。
ZLG9518S芯片的自动流控功能还支持触发点的设置,通过向TCR寄存器写入相应的参数,即可实现对触发位置的调整。
其中,TCR寄存器主要分为高4位和低4位,高4位代表恢复流控触发点,低4位代表终止流控触发点,具体如表3.10所示。
表3.10 TCR寄存器(地址为3)引脚的输出电平跳变位置。
流控RTS的输出波形就像施密特触发器一样,如图3.2所示。
当串口的接收缓存达到TCR寄存器中的终止流控触发点时,RTS从低电平跳变到高电平;当串口的接收缓存少于TCR寄存器中的恢复流控触发点时,RTS才会从高电平跳变回低电平,恢复串口的接图3.2 区域拷贝示意图收功能。
当拉大恢复触发点和终止触发点的距离时,此时RTS引脚的电平跳变过渡时间变长;相反则过渡时间变短。
调整恢复触发点和终止触发点的方法很简单,只需在TCR寄存器中,将相应的参数写入到该寄存器中即可,具体参数如表3.11所示。
表3.11 TCR寄存器的触发点参数注:恢复触发点的值必须小于终止触发点的值,否则会导致错误寄存器的参数错误位置位。
3.4 中断功能ZLG9518S芯片支持中断,由于8路串口共用一个中断引脚IRQ,因此只要其中有一路串口满足中断条件,且使能了该中断,那么IRQ将输出信号通知MCU,MCU可以即刻响应中断,以及时了解和处理ZLG9518S芯片的事务。
ZLG9518S芯片的每一路串口都支持三种中断,分别为FIFO中断、流控中断和错误中断。
这三种中断都可以根据需要使能和禁能,如表3.4所示的LCR1寄存器,可以控制该寄存器的第5、6和7位来使能或者禁能某一中断。
当ZLG9518S芯片产生了中断信号时,MCU可以通过查询IER寄存器来获知具体是哪一类触发了中断。
IER寄存器的具体参数如表3.12所示。
表3.12 IER寄存器(地址为7)注:IER寄存器中只要有任意一位置1,则IRQ引脚将输出低电平的中断信号,MCU只能通过读取该寄存器来清零和清除中断信号。
其中,LCR1寄存器的第5位控制着IER寄存器的发送和接收FIFO中断;LCR1寄存器的第6位控制着IER寄存器的流控RTS和CTS中断;LCR1寄存器的第7位则是控制着IER寄存器的错误中断位。
当LCR1寄存器的相应中断控制位置1时,IER寄存器在满足中断的条件下才会将相应的中断位置1,进而产生中断;否则,即使满足了中断条件,IER寄存器的相应中断位也不会置1,从而导致中断被屏蔽和禁能。
3.4.1 FIFO中断ZLG9518S芯片的任意一个串口收发缓存都各高达255字节,MCU可以使用查询的方式获知某一路串口此时的FIFO中接收了多少个数据,进而决定是否要读取该FIFO中的数据。
然而,采用查询的方式势必会降低MCU的效率,且在大多数情况下,用户可能只要接收到十几个数据后通知MCU去读数据,因此,采用FIFO中断方式即可实现。
FIFO中断分为发送FIFO中断和接收FIFO中断。