周立功单片机 MPQ2013数据手册(中文)-V1.00
周立功单片机 XUF212-512-FB236-Datasheet_1.2
XUF212-512-FB236Datasheet2015/05/06Document Number:X007801, XMOS©2015,All Rights ReservedTable of Contents1xCORE Multicore Microcontrollers (2)2XUF212-512-FB236Features (4)3Pin Configuration (5)4Signal Description (6)5Example Application Diagram (11)6Product Overview (12)7PLL (15)8Boot Procedure (16)9Memory (17)10USB PHY (18)11JTAG (19)12Board Integration (21)13DC and Switching Characteristics (24)14Package Information (27)15Ordering Information (28)Appendices (29)A Configuration of the XUF212-512-FB236 (29)B Processor Status Configuration (32)C Tile Configuration (43)D Node Configuration (51)E USB Node Configuration (59)F USB PHY Configuration (61)G Device Errata (68)H JTAG,xSCOPE and Debugging (68)I Schematics Design Check List (70)J PCB Layout Design Check List (72)K Associated Design Documentation (73)L Related Documentation (73)M Revision History (74)TO OUR VALUED CUSTOMERSIt is our intention to provide you with accurate and comprehensive documentation for the hardware and software components used in this product.To subscribe to receive updates,visit /.XMOS Ltd.is the owner or licensee of the information in this document and is providing it to you“AS IS”with no warranty of any kind,express or implied and shall have no liability in relation to its use.XMOS Ltd.makes no representation that the information,or any particular implementation thereof,is or will be free from any claims of infringement and again,shall have no liability in relation to any such claims.XMOS and the XMOS logo are registered trademarks of XMOS Ltd in the United Kingdom and other countries, and may not be used without written pany and product names mentioned in this document are the trademarks or registered trademarks of their respective owners.1xCORE Multicore MicrocontrollersThe xCORE200Series is a comprehensive range of32-bit multicore microcontrollersthat brings the low latency and timing determinism of the xCORE architecture tomainstream embedded applications.Unlike conventional microcontrollers,xCOREmulticore microcontrollers execute multiple real-time tasks simultaneously andcommunicate between tasks using a high speed network.Because xCORE multicoremicrocontrollers are completely deterministic,you can write software to implementfunctions that traditionally require dedicated hardware.Figure1:XUF212-512-FB236blockdiagramKey features of the XUF212-512-FB236include:Tiles:Devices consist of one or more xCORE tiles.Each tile contains between five and eight32-bit xCOREs with highly integrated I/O and on-chip memory.Logical cores Each logical core can execute tasks such as computational code, DSP code,control software(including logic decisions and executing a statemachine)or software that handles I/O.Section6.1xTIME scheduler The xTIME scheduler performs functions similar to an RTOS, in hardware.It services and synchronizes events in a core,so there is norequirement for interrupt handler routines.The xTIME scheduler triggers coreson events generated by hardware resources such as the I/O pins,communicationchannels and timers.Once triggered,a core runs independently and concurrentlyto other cores,until it pauses to wait for more events.Section6.2Channels and channel ends Tasks running on logical cores communicate using channels formed between two channel ends.Data can be passed synchronouslyor asynchronously between the channel ends assigned to the communicatingtasks.Section6.5xCONNECT Switch and Links Between tiles,channel communications are im-plemented over a high performance network of xCONNECT Links and routedthrough a hardware xCONNECT Switch.Section6.6Ports The I/O pins are connected to the processing cores by Hardware Response ports.The port logic can drive its pins high and low,or it can sample the value on its pins optionally waiting for a particular condition.Section6.3Clock blocks xCORE devices include a set of programmable clock blocks that can be used to govern the rate at which ports execute.Section6.4Memory Each xCORE Tile integrates a bank of SRAM for instructions and data, and a block of one-time programmable(OTP)memory that can be configured for system wide security features.Section9PLL The PLL is used to create a high-speed processor clock given a low speed external oscillator.Section7USB The USB PHY provides High-Speed and Full-Speed,device,host,and on-the-go functionality.Data is communicated through ports on the digital node.A library is provided to implement USB device functionality.Section10Flash The device has a built-in2MBflash.Section8JTAG The JTAG module can be used for loading programs,boundary scan testing, in-circuit source-level debugging and programming the OTP memory.Section111.1SoftwareDevices are programmed using C,C++or xC(C with multicore extensions).XMOS provides tested and proven software libraries,which allow you to quickly add interface and processor functionality such as USB,Ethernet,PWM,graphics driver, and audio EQ to your applications.1.2xTIMEcomposer StudioThe xTIMEcomposer Studio development environment provides all the tools you need to write and debug your programs,profile your application,and write images intoflash memory or OTP memory on the device.Because xCORE devices oper-ate deterministically,they can be simulated like hardware within xTIMEcomposer: uniquely in the embedded world,xTIMEcomposer Studio therefore includes a static timing analyzer,cycle-accurate simulator,and high-speed in-circuit instrumenta-tion.xTIMEcomposer can be driven from either a graphical development environment, or the command line.The tools are supported on Windows,Linux and MacOS X and available at no cost from /rmation on using the tools is provided in the xTIMEcomposer User Guide,X3766.2XUF212-512-FB236FeaturesMulticore Microcontroller with Advanced Multi-Core RISC Architecture •12real-time logical cores on2xCORE tiles•Cores share up to1000MIPS—Up to2000MIPS in dual issue mode•Each logical core has:—Guaranteed throughput of between1/5and1/6of tile MIPS—16x32bit dedicated registers•167high-density16/32-bit instructions—All have single clock-cycle execution(except for divide)—32x32→64-bit MAC instructions for DSP,arithmetic and user-definable cryptographic functionsUSB PHY,fully compliant with USB2.0specificationProgrammable I/O•128general-purpose I/O pins,configurable as input or output—Up to32x1bit port,12x4bit port,8x8bit port,4x16bit port,2x32bit port—8xCONNECT links•Port sampling rates of up to60MHz with respect to an external clock•32channel ends for communication with other cores,on or off-chipMemory•512KB internal single-cycle SRAM(max256KB per tile)for code and data storage•16KB internal OTP(max8KB per tile)for application boot code•2MB internalflash for application code and overlaysHardware resources•12clock blocks(6per tile)•20timers(10per tile)•8locks(4per tile)JTAG Module for On-Chip DebugSecurity Features•Programming lock disables debug and prevents read-back of memory contents•AES bootloader ensures secrecy of IP held on externalflash memoryAmbient Temperature Range•Commercial qualification:0°C to70°C•Industrial qualification:-40°C to85°CSpeed Grade•20:1000MIPS236-pin FBGA package0.5mm pitch3Pin Configuration4Signal DescriptionThis section lists the signals and I/O pins available on the XUF212-512-FB236.Thedevice provides a combination of1bit,4bit,8bit and16bit ports,as well as widerports that are fully or partially(gray)bonded out.All pins of a port provide eitheroutput or input,but signals in different directions cannot be mapped onto thesame port.Pins may have one or more of the following properties:PD/PU:The IO pin a weak pull-down or pull-up resistor.On GPIO pins this resistor can be enabled.ST:The IO pin has a Schmitt Trigger on its input.IOL/IOT/IOR:The IO pin is powered from VDDIOL,VDDIOT,and VDDIOR respec-tively5Example Application DiagramGPIO ReferenceSchematic6Product OverviewThe XUF212-512-FB236is a powerful device that consists of two xCORE Tiles,each comprising aflexible logical processing cores with tightly integrated I/O andon-chip memory.6.1Logical coresEach tile has6active logical cores,which issue instructions down a sharedfive-stage pipeline.Instructions from the active cores are issued round-robin.If up tofive logical cores are active,each core is allocated afifth of the processing cycles.If more thanfive logical cores are active,each core is allocated at least1/n cycles(for n cores).Figure3shows the guaranteed core performance depending on thenumber of cores used.Figure3:Logical coreperformanceThere is no way that the performance of a logical core can be reduced below thesepredicted levels(unless priority threads are used:in this case the guaranteedminimum performance is computed based on the number of priority threadsas defined in the architecture manual).Because cores may be delayed on I/O,however,their unused processing cycles can be taken by other cores.This meansthat for more thanfive logical cores,the performance of each core is often higherthan the predicted minimum but cannot be guaranteed.The logical cores are triggered by events instead of interrupts and run to completion.A logical core can be paused to wait for an event.6.2xTIME schedulerThe xTIME scheduler handles the events generated by xCORE Tile resources,suchas channel ends,timers and I/O pins.It ensures that all events are serviced andsynchronized,without the need for an RTOS.Events that occur at the I/O pins arehandled by the Hardware-Response ports and fed directly to the appropriate xCORETile.An xCORE Tile can also choose to wait for a specified time to elapse,or fordata to become available on a channel.Tasks do not need to be prioritised as each of them runs on their own logicalxCORE.It is possible to share a set of low priority tasks on a single core usingcooperative multitasking.6.3Hardware Response PortsHardware Response ports connect an xCORE tile to one or more physical pins andas such define the interface between hardware attached to the XUF212-512-FB236,and the software running on it.A combination of1bit,4bit,8bit,16bit and32bitports are available.All pins of a port provide either output or input.Signals in different directions cannot be mapped onto the same port.PINSCORE output (drive)input (sample)Figure4:Port blockdiagramThe port logic can drive its pins high or low,or it can sample the value on its pins,optionally waiting for a particular condition.Ports are accessed using dedicatedinstructions that are executed in a single processor cycle.xCORE-200IO pins canbe used as open collector outputs,where signals are driven low if a zero is output,but left high impedance if a one is output.This option is set on a per-port basis.Data is transferred between the pins and core using a FIFO that comprises a SERDESand transfer register,providing options for serialization and buffered data.Each port has a16-bit counter that can be used to control the time at which data istransferred between the port value and transfer register.The counter values canbe obtained at any time tofind out when data was obtained,or used to delay I/Ountil some time in the future.The port counter value is automatically saved as atimestamp,that can be used to provide precise control of response times.The ports and xCONNECT links are multiplexed onto the physical pins.If anxConnect Link is enabled,the pins of the underlying ports are disabled.If a portis enabled,it overrules ports with higher widths that share the same pins.The pinson the wider port that are not shared remain available for use when the narrowerport is enabled.Ports always operate at their specified width,even if they sharepins with another port.6.4Clock blocksxCORE devices include a set of programmable clocks called clock blocks that canbe used to govern the rate at which ports execute.Each xCORE tile has six clockblocks:thefirst clock block provides the tile reference clock and runs at a defaultfrequency of100MHz;the remaining clock blocks can be set to run at differentfrequencies.1-bit port100MHz reference clockFigure 5:Clock blockdiagramA clock block can use a 1-bit port as its clock source allowing external application clocks to be used to drive the input and output interfaces.xCORE-200clock blocks optionally divide the clock input from a 1-bit port.In many cases I/O signals are accompanied by strobing signals.The xCORE ports can input and interpret strobe (known as readyIn and readyOut)signals generated by external sources,and ports can generate strobe signals to accompany output data.On reset,each port is connected to clock block 0,which runs from the xCORE Tile reference clock.6.5Channels and Channel EndsLogical cores communicate using point-to-point connections,formed between two channel ends.A channel-end is a resource on an xCORE tile,that is allocated by the program.Each channel-end has a unique system-wide identifier that comprises a unique number and their tile identifier.Data is transmitted to a channel-end by an output-instruction;and the other side executes an input-instruction.Data can be passed synchronously or asynchronously between the channel ends.6.6xCONNECT Switch and LinksXMOS devices provide a scalable architecture,where multiple xCORE devices can be connected together to form one system.Each xCORE device has an xCONNECT interconnect that provides a communication infrastructure for all tasks that run on the various xCORE tiles on the system.The interconnect relies on a collection of switches and XMOS links.Each xCORE device has an on-chip switch that can set up circuits or route data.The switches are connected by xConnect Links.An XMOS link provides a physical connection between two switches.The switch has a routing algorithm that supports many different topologies,including lines,meshes,trees,and hypercubes.The links operate in either 2wires per direction or 5wires per direction mode,depending on the amount of bandwidth required.Circuit switched,streamingand packet switched data can both be supported efficiently.Streams provide the fastest possible data rates between xCORE Tiles (up to 250MBit/s),but each stream requires a single link to be reserved between switches on two tiles.All packet communications can be multiplexed onto a single link.Information on the supported routing topologies that can be used to connect multiple devices together can be found in the XS1-UF Link Performance and Design Guide,X2999.7PLLThe PLL creates a high-speed clock that is used for the switch,tile,and reference clock.The PLL multiplication value is selected through the two MODE pins,and can be changed by software to speed up the tile or use less power.The MODE pins are set as shown in Figure 7:Figure 7:PLL multiplier values and MODE pinsXUF212-512-FB236Datasheet16 Figure7also lists the values of OD,F and R,which are the registers that definethe ratio of the tile frequency to the oscillator frequency:F cor e=F osc×F+12×1R+1×1OD+1OD,F and R must be chosen so that0≤R≤63,0≤F≤4095,0≤OD≤7,and260MHz≤F osc×F+12×1R+1≤1.3GHz.The OD,F,and R values can be modifiedby writing to the digital node PLL configuration register.The MODE pins must be held at a static value during and after deassertion of thesystem reset.If the USB PHY is used,then either a24MHz or12MHz oscillatormust be used.If a different tile frequency is required(eg,500MHz),then the PLL must bereprogrammed after boot to provide the required tile frequency.The XMOS toolsperform this operation by default.Further details on configuring the clock can befound in the xCORE-200Clock Frequency Control document.8Boot ProcedureThe device is kept in reset by driving RST_N low.When in reset,all GPIO pins havea pull-down enabled.The processor must be held in reset until VDDIOL is in specfor at least1ms.When the device is taken out of reset by releasing RST_N theprocessor starts its internal reset process.After15-150µs(depending on theinput clock)the processor boots.The device boots from a QSPIflash that is embedded in the device.The QSPIflashis connected to the ports on Tile0as shown in Figure8.An external1K resistormust connect X0D01to VDDIOL.X0D10should ideally not be connected.If X0D10is connected,then a150ohm series resistor close to the device is recommended.X0D04..X0D07should be not connected.1KFigure8:QSPI portconnectivityThe xCORE Tile boot procedure is illustrated in Figure9.If bit5of the securityregister(see§9.1)is set,the device boots from OTP.Otherwise,the device bootsfrom the internalflash.The boot image has the following format:Figure9:BootprocedureA32-bit program size s in words.Program consisting of s×4bytes.A32-bit CRC,or the value0x0D15AB1E to indicate that no CRC check should be performed.The program size and CRC are stored least significant bytefirst.The programis loaded into the lowest memory address of RAM,and the program is startedfrom that address.The CRC is calculated over the byte stream represented by theprogram size and the program itself.The polynomial used is0xEDB88320(IEEE802.3);the CRC register is initialized with0xFFFFFFFF and the residue is invertedto produce the CRC.8.1Security registerThe security register enables security features on the xCORE tile.The featuresshown in Figure10provide a strong level of protection and are sufficient forproviding strong IP security.9Memory9.1OTPEach xCORE Tile integrates8KB one-time programmable(OTP)memory along witha security register that configures system wide security features.The OTP holdsdata in four sectors each containing512rows of32bits which can be used toimplement secure bootloaders and store encryption keys.Data for the securityregister is loaded from the OTP on power up.All additional data in OTP is copiedfrom the OTP to SRAM and executedfirst on the processor.Figure10:SecurityregisterfeaturesThe OTP memory is programmed using three special I/O ports:the OTP addressport is a16-bit port with resource ID0x100200,the OTP data is written via a32-bitport with resource ID0x200100,and the OTP control is on a16-bit port with ID0x100300.Programming is performed through libotp and xburn.9.2SRAMEach xCORE Tile integrates a single256KB SRAM bank for both instructions anddata.All internal memory is32bits wide,and instructions are either16-bit or32-bit.Byte(8-bit),half-word(16-bit)or word(32-bit)accesses are supported andare executed within one tile clock cycle.There is no dedicated external memoryinterface,although data memory can be expanded through appropriate use of theports.10USB PHYThe USB PHY provides High-Speed and Full-Speed,device,host,and on-the-go func-tionality.The PHY is configured through a set of peripheral registers(Appendix F),and data is communicated through ports on the digital node.A library,libxud_s.a,is provided to implement USB device functionality.The USB PHY is connected to the ports on Tile0and Tile1as shown in Figure11.When the USB PHY is enabled on Tile0,the ports shown can on Tile0only be usedwith the USB PHY.When the USB PHY is enabled on Tile1,then the ports shown canon Tile1only be used with the USB PHY.All other IO pins and ports are unaffected.The USB PHY should not be enabled on both tiles.An external resistor of43.2ohm(1%tolerance)should connect USB_TUNE toground,as close as possible to the device.Figure11:USB portfunctionsFigure11shows how two clock blocks can be used to clock the USB ports.Oneclock block for the TXDATA path,and one clock block for the RXDATA path.Detailson how to connect those ports are documented in an application note on USB forxCORE-200.10.1Logical Core RequirementsThe XMOS XUD software component runs in a single logical core with endpoint andapplication cores communicating with it via a combination of channel communica-tion and shared memory variables.Each IN(host requests data from device)or OUT(data transferred from host todevice)endpoint requires one logical core.11JTAGThe JTAG module can be used for loading programs,boundary scan testing,in-circuit source-level debugging and programming the OTP memory.The JTAG chain structure is illustrated in Figure12.Directly after reset,two TAPcontrollers are present in the JTAG chain for each xCORE Tile:the boundary scanTAP and the chip TAP.The boundary scan TAP is a standard1149.1compliant TAPTDITCK TMSthat can be used for boundary scan of the I/O pins.The chip TAP provides access into the xCORE Tile,switch and OTP for loading code and debugging.The TRST_N pin must be asserted low during and after power up for 100ns.If JTAG is not required,the TRST_N pin can be tied to ground to hold the JTAG module in reset.The DEBUG_N pin is used to synchronize the debugging of multiple xCORE Tiles.This pin can operate in both output and input mode.In output mode and when configured to do so,DEBUG_N is driven low by the device when the processor hits a debug break point.Prior to this point the pin will be tri-stated.In input mode and when configured to do so,driving this pin low will put the xCORE Tile into debug mode.Software can set the behavior of the xCORE Tile based on this pin.This pin should have an external pull up of 4K7-47K Ωor left not connected in single core applications.The JTAG device identification register can be read by using the IDCODE instruction.Its contents are specified in Figure 13.Bit31Device Identification RegisterBit0Version Part Number Manufacturer Identity 1000000000111101101100006633Figure 13:IDCODE return valueThe JTAG usercode register can be read by using the USERCODE instruction.Its contents are specified in Figure 14.The OTP User ID field is read from bits [22:31]of the security register on xCORE Tile 0,see §9.1(all zero on unprogrammed devices).Bit31Usercode RegisterBit0OTP User IDUnused Silicon Revision 000000001100000000000028000Figure 14:USERCODE return value12Board IntegrationThe device has the following power supply pins:VDD pins for the xCORE Tile,including a USB_VDD pin that powers the USB PHYVDDIO pins for the I/O lines.Separate I/O supplies are provided for the left,top, and right side of the package;different I/O voltages may be supplied on those.The signal description(Section4)specifies which I/O is powered from whichpower-supplyPLL_AVDD pins for the PLLOTP_VCC pins for the OTPA USB_VDD33pin for the analogue supply to the USB-PHYSeveral pins of each type are provided to minimize the effect of inductance withinthe package,all of which must be connected.The power supplies must be broughtup monotonically and input voltages must not exceed specification at any time.The VDD supply must ramp from0V to itsfinal value within10ms to ensurecorrect startup.The VDDIO and OTP_VCC supply must ramp to itsfinal value before VDD reaches0.4V.The PLLVDD supply should be separated from the other noisier supplies on theboard.The PLL requires a very clean power supply,and a low passfilter(forexample,a4.7Ωresistor and multi-layer ceramic capacitor)is recommended onthis pin.The following ground pins are provided:PLL_AGND for PLL_AVDDGND for all other suppliesAll ground pins must be connected directly to the board ground.The VDD and VDDIO supplies should be decoupled close to the chip by several100nF low inductance multi-layer ceramic capacitors between the supplies andGND(for example,4x100nF0402low inductance MLCCs per supply rail).Theground side of the decoupling capacitors should have as short a path back to theGND pins as possible.A bulk decoupling capacitor of at least10uF should beplaced on each of these supplies.RST_N is an active-low asynchronous-assertion global reset signal.Following areset,the PLL re-establishes lock after which the device boots up according to theboot mode(see§8).RST_N and must be asserted low during and after power upfor100ns.12.1Land patterns and solder stencilsThe land pattern recommendations in this document are based on a RoHS compliant process and derived,where possible,from the nominal Generic Requirements for Surface Mount Design and Land Pattern Standards IPC-7351B specifications.This standard aims to achieve desired targets of heel,toe and side fillets for solder-joints.Solder paste and ground via recommendations are based on our engineering and development kit board production.They have been found to work and optimized as appropriate to achieve a high yield.The size,type and number of vias used in the center pad affects how much solder wicks down the vias during reflow.This in turn,along with solder paster coverage,affects the final assembled package height.These factors should be taken into account during design and manufacturing of the PCB.The following land patterns and solder paste contains recommendations.Final land pattern and solder paste decisions are the responsibility of the customer.These should be tuned during manufacture to suit the manufacturing process.The package is a 236pin Ball Grid Array package on a 0.5mm pitch with 0.3mm balls.An example land pattern is shown in Figure 15.Figure 15:Example landpatternThe landing pads for the balls should have a 0.25mm diameter,with a 0.275mm opening in the soldermask.Alternatively,if larger pads are desired (for example to include a standard HDI in-pad via),then the soldermask should constrain thosepads to be0.25mm in diameter(Solder Mask Defined pads).Contact your PCB manufacturing and assembly facilities for recommendations for your particular design.The missing balls in the outer rows can be used to route thefirst inner row out over the top layer.The missing balls in the center can be used for through-hole ground vias.The missing rows four andfive can be used for through-hole VDD vias if required.12.2Ground and Thermal ViasVias next to each ground ball into the ground plane of the PCB are recommended for a low inductance ground connection and good thermal performance.Vias with with a0.6mm diameter annular ring and a0.3mm drill would be suitable.12.3Moisture SensitivityXMOS devices are,like all semiconductor devices,susceptible to moisture absorp-tion.When removed from the sealed packaging,the devices slowly absorb moisture from the surrounding environment.If the level of moisture present in the device is too high during reflow,damage can occur due to the increased internal vapour pressure of moisture.Example damage can include bond wire damage,die lifting, internal or external package cracks and/or delamination.All XMOS devices are Moisture Sensitivity Level(MSL)3-devices have a shelf life of168hours between removal from the packaging and reflow,provided they are stored below30C and60%RH.If devices have exceeded these values or an included moisture indicator card shows excessive levels of moisture,then the parts should be baked as appropriate before use.This is based on information from Joint IPC/JEDEC Standard For Moisture/Reflow Sensitivity Classification For Nonhermetic Solid State Surface-Mount Devices J-STD-020Revision D.。
周立功 LPC2000系列ARM微控制器应用开发教程说明书

个人电脑已经是64位了,您还在使用8位微控制器吗?尽管一般情况下嵌入式系统对CPU处理能力的要求比个人电脑(对CPU处理能力的要求)低,但随着人们生活的提高和技术的进步,嵌入式系统对CPU处理能力的要求也稳步的提高,大量高速的与MCS51体系结构兼容的微控制器的出现就证明了这一点。
但8位微控制器受限于体系结构,处理能力的提高始终有限。
而16位系统在性能上与8位机相比始终没有太大优势,成本上与32位系统相比也没有什么优势,未来一段时间嵌入式微控制器的发展方向必然是32位系统。
基于ARM体系结构的32位系统占领了32位嵌入式系统的大部分分额,但长期以来,基于ARM体系结构的32位系统仅在嵌入式式系统的高端(通讯领域、PDA)等场合使用,要么以专用芯片的面貌出现,要么以位处理器的庙貌出现,并没有出现性价比高的通用的微控制器。
PHILIPS发现了这个空当,推出了性价比很高LPC2000系列微控制器,让更多的嵌入式系统具有32位的处理能力。
这也预示着32位系统即将成为嵌入式系统的主流。
基于ARM体系结构的芯片在中国推广已经有好几年了,关于ARM的图书也出了不少。
关于ARM的图书主要有以下几类:1.关于ARM内核的图书,主要读者是芯片设计者,内容主要是介绍芯片设计的。
2.芯片应用类图书,主要是芯片的生产商或代理商编写,主要读者为应用工程师。
3.开发板类图书,主要介绍相应的ARM开发板,给应用者一些参考。
以上3类图书的侧重点都不是ARM应用开发教学,用于大学本科教学不太适合。
为了方便高等院校教学方便,笔者编写了这本教材。
不过,因为嵌入式系统牵涉的知识太广,一本教材无法深入论述。
为此,笔者还会推出多本被套图书以便学生知识扩展。
第1章嵌入式系统概述 (1)1.1嵌入式系统 (1)1.1.1 现实中的嵌入式系统 (1)1.1.2 嵌入式系统的概念 (2)1.1.3 嵌入式系统的未来 (2)1.2嵌入式处理器 (2)1.2.1 简介 (2)1.2.2 分类 (3)1.3嵌入式操作系统 (4)1.3.1 简介 (4)1.3.2 基本概念 (5)1.3.3 使用实时操作系统的必要性 (8)1.3.4 实时操作系统的优缺点 (8)1.3.5 常见的嵌入式操作系统 (8)第2章嵌入式系统工程设计 (14)2.1嵌入式系统项目开发生命周期 (14)2.1.1 概述 (14)2.1.2 识别需求 (15)2.1.3 提出方案 (17)2.1.4 执行项目 (19)2.1.5 结束项目 (21)2.2嵌入式系统工程设计方法简介 (22)2.2.1 由上而下与由下而上 (22)2.2.2 UML系统建模 (22)2.2.3 面向对象OO的思想 (23)第3章ARM7体系结构 (25)3.1简介 (25)3.1.1 ARM (25)3.1.2 ARM的体系结构 (25)3.1.3 ARM处理器核简介 (26)3.2ARM7TDMI (27)3.2.1 简介 (27)3.2.2 三级流水线 (28)3.2.4 存储器接口 (28)3.3ARM7TDMI的模块和内核框图 (29)3.4体系结构直接支持的数据类型 (31)3.5处理器状态 (32)3.6处理器模式 (32)3.7内部寄存器 (33)3.7.1 简介 (33)3.7.2 ARM状态寄存器集 (33)3.7.3 Thumb状态寄存器集 (35)3.8程序状态寄存器 (37)3.8.1 简介 (37)3.8.2 条件代码标志 (38)3.8.3 控制位 (38)3.8.4 保留位 (39)3.9异常 (39)3.9.1 简介 (39)3.9.2 异常入口/出口汇总 (39)3.9.3 进入异常 (40)3.9.4 退出异常 (41)3.9.5 快速中断请求 (41)3.9.6 中断请求 (41)3.9.7 中止 (41)3.9.8 软件中断指令 (42)3.9.9 未定义的指令 (42)3.9.10 异常向量 (42)3.9.11 异常优先级 (43)3.10中断延迟 (43)3.10.1 最大中断延迟 (43)3.10.2 最小中断延迟 (44)3.11复位 (44)3.12存储器及存储器映射I/O (44)3.12.1 简介 (44)3.12.2 地址空间 (44)3.12.3 存储器格式 (45)3.12.4 未对齐的存储器访问 (46)3.12.5 指令的预取和自修改代码 (47)3.13寻址方式简介 (51)3.14ARM7指令集简介 (52)3.14.1 简介 (52)3.14.2 ARM指令集 (52)3.14.3 Thumb指令集 (54)3.15协处理器接口 (56)3.15.1 简介 (56)3.15.2 可用的协处理器 (56)3.15.3 关于未定义的指令 (57)3.16调试接口简介 (57)3.16.1 典型调试系统 (57)3.16.2 调试接口 (58)3.16.3 EmbeddedICE-RT (58)3.16.4 扫描链和JTAG接口 (59)3.17ETM接口简介 (59)第4章ARM7TDMI(-S)指令系统 (61)4.1ARM处理器寻址方式 (61)4.2指令集介绍 (64)4.2.1 ARM指令集 (64)4.2.2 Thumb指令集 (90)第5章LPC2000系列ARM硬件结构 (112)5.1简介 (112)5.1.1 描述 (112)5.1.2 特性 (112)5.1.3 器件信息 (113)5.1.4 结构概述 (113)5.2引脚配置 (114)5.2.1 引脚排列及封装信息 (114)5.2.2 LPC2114/2124的引脚描述 (116)5.2.3 LPC2210/2212/2214的引脚描述 (120)5.2.4 引脚功能选择使用示例 (126)5.3存储器寻址 (126)5.3.1 片内存储器 (126)5.3.3 存储器映射 (127)5.3.4 预取指中止和数据中止异常 (131)5.3.5 存储器重映射及引导块 (132)5.3.6 启动代码相关部分 (134)5.4系统控制模块 (136)5.4.1 系统控制模块功能汇总 (136)5.4.2 引脚描述 (137)5.4.3 寄存器描述 (137)5.4.4 晶体振荡器 (138)5.4.5 复位 (139)5.4.6 外部中断输入 (142)5.4.7 外部中断应用示例 (145)5.4.8 存储器映射控制 (146)5.4.9 PLL(锁相环) (148)5.4.10 VPB分频器 (153)5.4.11 功率控制 (154)5.4.12 唤醒定时器 (156)5.4.13 启动代码相关部分 (156)5.5存储器加速模块(MAM) (158)5.5.1 描述 (158)5.5.2 MAM结构 (159)5.5.3 MAM的操作模式 (160)5.5.4 MAM配置 (161)5.5.5 寄存器描述 (161)5.5.6 MAM使用注意事项 (162)5.5.7 启动代码相关部分 (162)5.6外部存储器控制器(EMC) (163)5.6.1 特性 (163)5.6.2 概述 (163)5.6.3 引脚描述 (164)5.6.4 寄存器描述 (164)5.6.5 外部存储器接口 (166)5.6.6 典型总线时序 (168)5.6.7 外部存储器选择 (168)5.6.8 启动代码相关部分 (169)5.7引脚连接模块 (170)5.7.1 介绍 (170)5.7.2 寄存器描述 (170)5.7.3 引脚功能控制 (173)5.7.4 启动代码相关部分 (173)5.8.1 特性 (175)5.8.2 描述 (175)5.8.3 结构 (176)5.8.4 寄存器描述 (177)5.8.5 中断源 (181)5.8.6 VIC使用事项 (183)5.8.7 VIC应用示例 (184)5.8.8 启动代码相关部分 (185)5.9GPIO (186)5.9.1 特性 (186)5.9.2 应用 (186)5.9.3 引脚描述 (187)5.9.4 寄存器描述 (187)5.9.5 GPIO使用注意事项 (189)5.9.6 GPIO应用示例 (189)5.10UART 0 (189)5.10.1 特性 (189)5.10.2 引脚描述 (190)5.10.3 应用 (190)5.10.4 结构 (190)5.10.5 寄存器描述 (191)5.10.6 使用示例 (198)5.11UART1 (200)5.11.1 特性 (200)5.11.2 引脚描述 (200)5.11.3 应用 (201)5.11.4 结构 (202)5.11.5 寄存器描述 (203)5.12I2C接口 (211)5.12.1 特性 (211)5.12.2 应用 (211)5.12.3 引脚描述 (211)5.12.4 I2C接口描述 (211)5.12.5 I2C操作模式 (214)5.12.6 寄存器描述 (225)5.13SPI接口 (228)5.13.1 特性 (228)5.13.2 引脚描述 (228)5.13.3 描述 (229)5.13.5 寄存器描述 (235)5.14定时器0和定时器1 (237)5.14.1 描述 (237)5.14.2 特性 (237)5.14.3 应用 (238)5.14.4 管脚描述 (238)5.14.5 结构 (239)5.14.6 寄存器描述 (239)5.14.7 定时器举例操作 (244)5.14.8 使用示例 (245)5.15脉宽调制器(PWM) (247)5.15.1 特性 (247)5.15.2 引脚描述 (248)5.15.3 描述 (248)5.15.4 结构 (249)5.15.5 寄存器描述 (251)5.15.6 使用示例 (256)5.16A/D转换器 (258)5.16.1 特性 (258)5.16.2 描述 (258)5.16.3 引脚描述 (258)5.16.4 寄存器描述 (259)5.16.5 操作 (261)5.16.6 使用示例 (261)5.17实时时钟 (262)5.17.1 特性 (262)5.17.2 描述 (262)5.17.3 结构 (262)5.17.4 RTC中断 (263)5.17.5 闰年计算 (264)5.17.6 寄存器描述 (264)5.17.7 混合寄存器组 (265)5.17.8 完整时间寄存器 (267)5.17.9 时间计数器组 (268)5.17.10 报警寄存器组 (269)5.17.11 基准时钟分频器(预分频器) (269)5.17.12 RTC使用注意事项 (271)5.17.13 使用示例 (271)5.18看门狗 (274)5.18.2 应用 (274)5.18.3 描述 (274)5.18.4 结构 (275)5.18.5 寄存器描述 (275)5.18.6 使用示例 (277)5.19本章小结 (278)第6章接口技术与硬件设计 (280)6.1最小系统 (280)6.1.1 框图 (280)6.1.2 电源 (280)6.1.3 时钟 (284)6.1.4 复位及复位芯片配置 (284)6.1.5 存储器系统 (287)6.1.6 调试与测试接口 (288)6.1.7 完整的最小系统 (289)6.2片内外设 (291)6.2.1 GPIO(通用I/O) (291)6.2.2 UART、MODEM (295)6.2.3 I2C (298)6.2.4 SPI (304)6.3总线接口 (308)6.3.1 并行SRAM (308)6.3.2 并行FALSH (314)6.3.3 USB(D12)接口 (328)6.3.4 液晶接口 (332)6.3.5 网络接口 (341)6.4其它外设 (350)6.4.1 并行打印机接口 (350)6.4.2 CF卡及IDE硬盘接口 (356)第7章移植µC/OS-II到ARM7 (362)7.1µC/OS-II简介 (362)7.1.1 概述 (362)7.1.2 µC/OS-II的特点 (362)7.2移植规划 (363)7.2.1 编译器的选择 (363)7.2.2 任务模式的取舍 (363)7.3移植µC/OS-II (363)7.3.1 概述 (363)7.3.2 关于头文件includes.h和config.h (364)7.3.3 编写OS_CPU.H (365)7.3.4 编写Os_cpu_c.c文件 (366)7.3.5 编写Os_cpu_a.s (371)7.3.6 关于中断及时钟节拍 (374)7.4移植代码应用到LPC2000 (376)7.4.1 编写或获取启动代码 (376)7.4.2 挂接SWI软件中断 (376)7.4.3 中断及时钟节拍中断 (377)7.4.4 编写应用程序 (377)7.5本章小结 (379)第8章嵌入式系统开发平台 (380)8.1如何建立嵌入式系统开发平台 (380)8.1.1 使用平台开发是大势所趋 (380)8.1.2 建立开发平台的方法 (383)8.1.3 编写自己的软件模块 (384)8.2数据队列 (384)8.2.1 简介 (384)8.2.2 API函数集 (384)8.3串口驱动 (387)8.3.1 简介 (387)8.3.2 API函数集 (387)8.4MODEM接口模块 (389)8.4.1 简介 (389)8.4.2 MODEM的状态 (389)8.4.3 API函数集 (389)8.5I2C总线模块 (390)8.5.1 简介 (390)8.5.2 API函数集 (391)8.6SPI总线模块 (392)8.6.1 简介 (392)8.6.2 API函数集 (392)第1章嵌入式系统概述1.1 嵌入式系统经过几十年的发展,嵌入式系统已经在很大程度改变了人们的生活、工作和娱乐方式,而且这些改变还在加速。
广州周立功单片机 LPC210 说明书
目录第1章 LPC2103简介 (1)1.1 概述 (1)1.2 LPC2103特性 (1)1.3 管脚信息 (2)1.4 器件信息 (6)第2章 EasyARM2103硬件说明 (7)2.1 功能特点 (7)2.2 硬件原理 (7)2.2.1 LPC2103 PACK板原理图 (7)2.2.2 EasyARM2103底板原理图 (8)2.3 硬件结构 (11)2.3.1 元件布局图 (11)2.3.2 开发板使用说明 (12)第3章 EasyARM2103快速入门 (13)3.1 ADS 1.2集成开发环境的组成 (13)3.1.1 CodeWarrior IDE简介 (13)3.1.2 AXD调试器简介 (14)3.2 工程的编辑 (15)3.2.1 建立工程 (15)3.2.2 建立文件 (16)3.2.3 添加文件到工程 (16)3.2.4 编辑连接工程 (17)3.2.5 打开旧工程 (20)3.3 工程的调试 (21)3.3.1 选择调试方式 (21)3.3.2 调试工具条 (21)3.4 LPC2103微控制器工程模板 (22)3.4.1 添加LPC2103专用工程模板 (23)3.4.2 应用LPC2103模板建立工程 (23)3.5 EasyJTAG-H简介 (24)3.5.1 EasyJTAG-H安装 (24)3.5.2 H-JTAG配置 (25)3.6 EasyJTAG-H仿真器的使用 (27)3.6.1 在开发板上运行第一个程序 (28)3.6.2 建立工程 (28)3.6.3 编译连接工程 (30)3.6.4 仿真调试 (30)3.6.5 脱机运行 (33)3.7 EasyJTAG-H常见问题 (33)第4章 LPC2103功能部件详解 (37)4.1 引脚连接模块 (37)4.1.1 概述 (37)4.1.2 寄存器描述 (37)4.1.3 应用示例 (39)4.2 GPIO (39)4.2.1 概述 (39)4.2.2 寄存器描述 (40)4.2.3 GPIO使用注意事项 (46)4.2.4 应用示例 (47)4.3 向量中断控制器 (51)4.3.1 概述 (51)4.3.2 特性 (51)4.3.3 寄存器描述 (51)4.3.4 中断源 (57)4.3.5 中断处理 (58)4.3.6 FIQ中断 (58)4.3.7 向量IRQ中断 (60)4.3.8 非向量中断 (62)4.4 外部中断 (64)4.4.1 概述 (64)4.4.2 寄存器描述 (65)4.4.3 外部中断引脚设置 (68)4.4.4 中断设置 (68)4.4.5 应用示例 (70)4.5 定时器0和定时器1 (72)4.5.1 概述 (72)4.5.2 特性 (72)4.5.3 引脚描述 (72)4.5.4 寄存器描述 (73)4.5.5 定时器中断 (80)4.5.6 应用示例 (81)4.6 定时器2和定时器3 (87)4.6.1 概述 (87)4.6.2 特性 (87)4.6.3 管脚描述 (87)4.6.4 寄存器描述 (88)4.6.5 定时器中断 (94)4.6.6 应用示例 (95)4.7 SPI控制器 (98)4.7.1 特性 (98)4.7.2 引脚描述 (98)4.7.3 SPI总线规范 (98)4.7.4 寄存器描述 (101)4.7.5 操作模式 (104)4.7.6 SPI接口中断 (107)4.7.7 应用示例 (108)4.8 SSP控制器 (112)4.8.1 概述 (112)4.8.2 特性 (112)4.8.3 引脚描述 (112)4.8.4 总线描述 (112)4.8.5 寄存器描述 (117)4.8.6 操作模式 (123)4.8.7 SSP接口中断设置 (125)4.8.8 应用示例 (127)4.9 UART接口 (131)4.9.1 概述 (131)4.9.2 特性 (131)4.9.3 引脚描述 (131)4.9.4 典型应用 (131)4.9.5 寄存器描述 (132)4.9.6 UART中断 (147)4.9.7 应用示例 (150)4.10 A/D转换器 (157)4.10.1 概述 (157)4.10.2 特性 (157)4.10.3 引脚描述 (157)4.10.4 寄存器描述 (157)4.10.5 操作 (162)4.10.6 ADC中断 (163)4.10.7 应用示例 (163)4.11 I2C接口 (172)4.11.1 特性 (172)4.11.2 引脚描述 (172)4.11.3 I2C总线规范 (172)4.11.4 寄存器描述 (177)4.11.5 操作模式 (178)4.11.6 I2C中断 (189)4.11.7 应用示例 (190)4.12 实时时钟 (193)4.12.1 概述 (193)4.12.2 特性 (193)4.12.3 寄存器描述 (193)4.12.4 闰年计算 (194)4.12.5 RTC使用注意事项 (194)4.12.6 RTC中断 (194)4.12.7 应用示例 (195)4.13 看门狗 (201)4.13.1 概述 (201)4.13.2 特性 (201)4.13.3 寄存器描述 (201)4.13.4 WDT中断 (203)4.13.5 应用示例 (204)4.14 PLL (206)4.14.1 概述 (206)4.14.2 寄存器描述 (206)4.14.3 PLL配置过程 (207)4.14.4 PLL操作 (208)4.14.5 应用示例 (208)。
(周立功)keil C51开发手册
第三章 8051 产品系列
Keil 提供工业用的 8051 开发工具 为了帮助你熟悉我们是如何分配工具的 下面介绍工具套件的 概念 工具套件是几个应用程序的集合 这些程序用来创建 8051 应用系统 使用汇编器汇编 8051 汇 编程序 使用编译器将 C 源代码编译成目标文件 使用连接器创建一个绝对目标文件模块供仿真器使 用
此外还需要足够的
CONFIG.SYS 文件应当和下列格式相似
BUFFERS 20
FILES 20
SHELL C:\/e: 1024/p 如果在 DOS 下收到信息 Out of environment space 境空间数量 详情参考 DOS 用户指南 备份磁盘
就需要通过增加示例中 1024 的值以增加环
在创建适当的目录后 安装程序将开发工具复制到下列子目录中
子目录
ASM BIN DS51 EXAMPLES RTX51 RTX_TINY INC LIB MON51 TS51
描述 汇编器包含文件 可执行文件 dScope-51 DOS IOF 驱动器 示例应用程序
RTX 51
RTX 51 C 编译器文件 C 编译器库文件和启动代码 目标监控文件 tScope-51 DOS IOT 驱动器
强烈建议用户将安装磁盘拷贝到一个备份盘上 然后用备份磁盘来安装软件 将原磁盘妥善保存
以防止备份磁盘丢失或损坏
安装 DOS 版产品 要安装 DOS 版 将第一个安装盘插入驱动器 A 并在 DOS 提示符下键入以下命令
A INSTALL 然后按安装程序的提示继续安装
广州周立功单片机 PHILIPS P89C5x 单片机数据手册
XTAL2 18 20
14
O
晶体 2: 晶振输出
注释:为了避免”latch-up”的影响,管脚上的电压最大不能高于 vcc+0.5,最低不能低于 vss- 0.5
4
广州周立功单片机发展有限公司 Tel 020 38730916 38730917 38730976 38730977 Fax:38730925
16
44
38
类型 I I
名称和功能 地: 0v 为标准 电源:提供掉电 空闲 正常电压
P0.0-0.7 39- 43-36 37-30 I/O P0 口:P0 口是开漏双向口,可以写 1 用作高阻抗悬浮.也可
32
以作多路转换,在访问外部程序存储器时作地址的低字节,
在访问外部数据存储器时作数据总线,当送 1,通过内部强
பைடு நூலகம்
BF
B8H
BE
BD
DC
BB
BA
B9
B8
PT2
PS
PT1
PX1
ET0
EX0
B7
B6 B5
B4
B3
B2
B1
B0
B7H
PT2H
PSH
PT1H PX1H PT0H
PX0H
87
86
85
84
83
82
81
80
80H
AD7
AD6
AD5
AD4
AD3
AD2
AD1
AD0
97
96
95
94
93
92
91
90
90H
T2EX
T2
A7
振荡器特性 配置为使用内部振荡器时 XTAL1 和 XTAL2 可分别作为一个反向放大器的输入和输出 要使用外部时钟源驱动器件时 XTAL2 可以不连接而由 XTAL1 驱动 外部时钟信号无 占空比的要求 因为时钟通过触发器二分频输入到内部时钟电路 但高低电平的最长和最 短时间必须符合资料的规定
CIMS说明手册(中文版)
CIMS说明手册(中文版)页次: 1CIMS MKII规格安装维护调整任何有关CERAMAX○R集成的测量系统的运行和修理的文件应呈递给:HYDRAUDYNE CYLINDER B.V.Postbus 325280 AA BOXTELTHE NETHERLANDS(荷兰)Telephone(电话):+341411651951Telecopier(电传):+31411674125*请以书面或电传形式证实电话请求。
页次: 2页次1.总论 32.运行原理 33.电气接口 33.1 电缆 43.2 电缆端子 43.3 屏蔽和接地 44.机械接口 45.电源 56.位置输出 57.运行条件 68.油缸条件 69.工具710.CIMS定货信息711.注意事项812.安装和维护913.CIMS传感器的安装914.传感器的调整914.1传感器的电阻平衡的调整1014.2传感器的信号振幅的调整1014.3调整的顺序1015.储藏条件12图表12 3-033、800-A2图纸19 列表20页次: 31.总论本系统以它的前身,一种用于CERAMAX○R液压缸高度集成的位移测量系统为基础研制的。
带有磁阻元件的传感器装在油缸头部的不锈钢外壳中,其中也包含磁敏二极管(SMD)技术的全部电子设备。
各传感元件和电子设备的保护级别为IP68,直至10巴。
电源电压是24V DC,输出是增量的正交的RS-422特性的信号。
测量系统和CERAMAX○R油缸一起在工厂调整获得最佳性能。
2.运行原理运行原理示于图1。
4个磁阻元件构成两个一半的惠斯登(Wheatston)电桥,用来检测交变的磁场。
这种交变磁场产生在永久磁铁和绝缘的CERAMAX○R活塞杆涂层下面的带沟槽的活塞杆之间。
传感元件由高频正弦信号激励。
由活塞杆位移信息调制输出信号。
这两种输出信号连同参考的激励信号变换为增量的A和B计数脉冲。
3.电气接口作为必要的内部电压,供给位移系统的24V DC电源具有宽的容限,由于它是在板式稳压转换器/调节器上。
ATTINY2313_06中文资料
Features•Utilizes the AVR® RISC Architecture•AVR – High-performance and Low-power RISC Architecture –120 Powerful Instructions – Most Single Clock Cycle Execution –32 x 8 General Purpose Working Registers–Fully Static Operation–Up to 20 MIPS Throughput at 20 MHz•Data and Non-volatile Program and Data Memories–2K Bytes of In-System Self Programmable FlashEndurance 10,000 Write/Erase Cycles–128 Bytes In-System Programmable EEPROMEndurance: 100,000 Write/Erase Cycles–128 Bytes Internal SRAM–Programming Lock for Flash Program and EEPROM Data Security •Peripheral Features–One 8-bit Timer/Counter with Separate Prescaler and Compare Mode–One 16-bit Timer/Counter with Separate Prescaler, Compare and Capture Modes –Four PWM Channels–On-chip Analog Comparator–Programmable Watchdog Timer with On-chip Oscillator–USI – Universal Serial Interface–Full Duplex USART•Special Microcontroller Features–debugWIRE On-chip Debugging–In-System Programmable via SPI Port–External and Internal Interrupt Sources–Low-power Idle, Power-down, and Standby Modes–Enhanced Power-on Reset Circuit–Programmable Brown-out Detection Circuit–Internal Calibrated Oscillator•I/O and Packages–18 Programmable I/O Lines–20-pin PDIP, 20-pin SOIC, 20-pad QFN/MLF•Operating Voltages–1.8 - 5.5V (ATtiny2313V)–2.7 - 5.5V (ATtiny2313)•Speed Grades–ATtiny2313V: 0 - 4 MHz @ 1.8 - 5.5V, 0 - 10 MHz @ 2.7 - 5.5V–ATtiny2313: 0 - 10 MHz @ 2.7 - 5.5V, 0 - 20 MHz @ 4.5 - 5.5V•Typical Power Consumption–Active Mode1 MHz, 1.8V: 230 µA32 kHz, 1.8V: 20 µA (including oscillator)–Power-down Mode< 0.1 µA at 1.8V 8-bit Microcontroller2ATtiny2313/V2543IS–AVR–04/06Pin ConfigurationsFigure 1. Pinout ATtiny2313OverviewThe ATtiny2313 is a low-power CMOS 8-bit microcontroller based on the AVR enhanced RISC architecture. By executing powerful instructions in a single clock cycle,the ATtiny2313 achieves throughputs approaching 1 MIPS per MHz allowing the system designer to optimize power consumption versus processing speed.3ATtiny2313/V2543IS–AVR–04/06Block DiagramFigure 2. Block Diagram4ATtiny2313/V2543IS–AVR–04/06The AVR core combines a rich instruction set with 32 general purpose working registers.All the 32 registers are directly connected to the Arithmetic Logic Unit (ALU), allowing two independent registers to be accessed in one single instruction executed in one clock cycle. The resulting architecture is more code efficient while achieving throughputs up to ten times faster than conventional CISC microcontrollers.The ATtiny2313 provides the following features: 2K bytes of In-System Programmable Flash, 128 bytes EEPROM, 128 bytes SRAM, 18general purpose I/O lines, 32 general purpose working registers, a single-wire Interface for On-chip Debugging, two flexible Timer/Counters with compare modes, internal and external interrupts, a serial program-mable USART, Universal Serial Interface with Start Condition Detector, a programmable Watchdog Timer with internal Oscillator, and three software selectable power saving modes. The Idle mode stops the CPU while allowing the SRAM, Timer/Counters, and interrupt system to continue functioning. The Power-down mode saves the register con-tents but freezes the Oscillator, disabling all other chip functions until the next interrupt or hardware reset. In Standby mode, the crystal/resonator Oscillator is running while the rest of the device is sleeping. This allows very fast start-up combined with low-power consumption.The device is manufactured using Atmel’s high density non-volatile memory technology.The On-chip ISP Flash allows the program memory to be reprogrammed In-System through an SPI serial interface, or by a conventional non-volatile memory programmer.By combining an 8-bit RISC CPU with In-System Self-Programmable Flash on a mono-lithic chip, the Atmel ATtiny2313 is a powerful microcontroller that provides a highly flexible and cost effective solution to many embedded control applications.The ATtiny2313 AVR is supported with a full suite of program and system development tools including: C Compilers, Macro Assemblers, Program Debugger/Simulators, In-Cir-cuit Emulators, and Evaluation kits.5ATtiny2313/V2543IS–AVR–04/06Pin DescriptionsVCC Digital supply voltage.GNDGround.Port A (PA2..PA0)Port A is a 3-bit bi-directional I/O port with internal pull-up resistors (selected for each bit). The Port A output buffers have symmetrical drive characteristics with both high sink and source capability. As inputs, Port A pins that are externally pulled low will source current if the pull-up resistors are activated. The Port A pins are tri-stated when a reset condition becomes active, even if the clock is not running.Port A also serves the functions of various special features of the ATtiny2313 as listed on page 53.Port B (PB7..PB0)Port B is an 8-bit bi-directional I/O port with internal pull-up resistors (selected for each bit). The Port B output buffers have symmetrical drive characteristics with both high sink and source capability. As inputs, Port B pins that are externally pulled low will source current if the pull-up resistors are activated. The Port B pins are tri-stated when a reset condition becomes active, even if the clock is not running.Port B also serves the functions of various special features of the ATtiny2313 as listed on page 53.Port D (PD6..PD0)Port D is a 7-bit bi-directional I/O port with internal pull-up resistors (selected for each bit). The Port D output buffers have symmetrical drive characteristics with both high sink and source capability. As inputs, Port D pins that are externally pulled low will source current if the pull-up resistors are activated. The Port D pins are tri-stated when a reset condition becomes active, even if the clock is not running.Port D also serves the functions of various special features of the ATtiny2313 as listed on page 56.Reset input. A low level on this pin for longer than the minimum pulse length will gener-ate a reset, even if the clock is not running. The minimum pulse length is given in Table 15 on page 34. Shorter pulses are not guaranteed to generate a reset. The Reset Input is an alternate function for PA2 and dW.XTAL1Input to the inverting Oscillator amplifier and input to the internal clock operating circuit.XTAL1 is an alternate function for PA0.XTAL2Output from the inverting Oscillator amplifier. XTAL2 is an alternate function for PA1.ResourcesA comprehensive set of development tools, application notes and datasheets are avail-able for downloadon /avr.6ATtiny2313/V2543IS–AVR–04/06Register SummaryAddressNameBit 7Bit 6Bit 5Bit 4Bit 3Bit 2Bit 1Bit 0Page0x3F (0x5F)SREG I T H S V N Z C 70x3E (0x5E)Reserved ––––––––0x3D (0x5D)SPL SP7SP6SP5SP4SP3SP2SP1SP0100x3C (0x5C)OCR0B Timer/Counter0 – Compare Register B780x3B (0x5B)GIMSK INT1INT0PCIE –––––600x3A (0x5A)EIFR INTF1INTF0PCIF –––––620x39 (0x59)TIMSK TOIE1OCIE1A OCIE1B –ICIE1OCIE0B TOIE0OCIE0A 79, 1100x38 (0x58)TIFR TOV1OCF1A OCF1B –ICF1OCF0B TOV0OCF0A 790x37 (0x57)SPMCSR –––CTPB RFLB PGWRT PGERS SELFPRGEN1560x36 (0x56)OCR0A Timer/Counter0 – Compare Register A780x35 (0x55)MCUCR PUD SM1SE SM0ISC11ISC10ISC01ISC00530x34 (0x54)MCUSR ––––WDRF BORF EXTRF PORF 370x33 (0x53)TCCR0B FOC0A FOC0B ––WGM02CS02CS01CS00770x32 (0x52)TCNT0Timer/Counter0 (8-bit)780x31 (0x51)OSCCAL –CAL6CAL5CAL4CAL3CAL2CAL1CAL0250x30 (0x50)TCCR0A COM0A1COM0A0COM0B1COM0B0––WGM01WGM00740x2F (0x4F)TCCR1A COM1A1COM1A0COM1B1COM1BO ––WGM11WGM101050x2E (0x4E)TCCR1B ICNC1ICES1–WGM13WGM12CS12CS11CS101080x2D (0x4D)TCNT1H Timer/Counter1 – Counter Register High Byte 1090x2C (0x4C)TCNT1L Timer/Counter1 – Counter Register Low Byte 1090x2B (0x4B)OCR1AH Timer/Counter1 – Compare Register A High Byte 1090x2A (0x4A)OCR1AL Timer/Counter1 – Compare Register A Low Byte 1090x29 (0x49)OCR1BH Timer/Counter1 – Compare Register B High Byte 1100x28 (0x48)OCR1BL Timer/Counter1 – Compare Register B Low Byte1100x27 (0x47)Reserved ––––––––0x26 (0x46)CLKPR CLKPCE–––CLKPS3CLKPS2CLKPS1CLKPS0270x25 (0x45)ICR1H Timer/Counter1 - Input Capture Register High Byte 1100x24 (0x44)ICR1L Timer/Counter1 - Input Capture Register Low Byte1100x23 (0x43)GTCCR –––––––PSR10820x22 (ox42)TCCR1C FOC1A FOC1B ––––––1090x21 (0x41)WDTCSR WDIF WDIE WDP3WDCE WDE WDP2WDP1WDP0420x20 (0x40)PCMSK PCINT7PCINT6PCINT5PCINT4PCINT3PCINT2PCINT1PCINT0620x1F (0x3F)Reserved ––––––––0x1E (0x3E)EEAR –EEPROM Address Register 150x1D (0x3D)EEDR EEPROM Data Register160x1C (0x3C)EECR ––EEPM1EEPM0EERIE EEMPE EEPE EERE 160x1B (0x3B)PORTA –––––PORTA2PORTA1PORTA0580x1A (0x3A)DDRA –––––DDA2DDA1DDA0580x19 (0x39)PINA –––––PINA2PINA1PINA0580x18 (0x38)PORTB PORTB7PORTB6PORTB5PORTB4PORTB3PORTB2PORTB1PORTB0580x17 (0x37)DDRB DDB7DDB6DDB5DDB4DDB3DDB2DDB1DDB0580x16 (0x36)PINB PINB7PINB6PINB5PINB4PINB3PINB2PINB1PINB0580x15 (0x35)GPIOR2General Purpose I/O Register 2200x14 (0x34)GPIOR1General Purpose I/O Register 1200x13 (0x33)GPIOR0General Purpose I/O Register 0200x12 (0x32)PORTD –PORTD6PORTD5PORTD4PORTD3PORTD2PORTD1PORTD0580x11 (0x31)DDRD –DDD6DDD5DDD4DDD3DDD2DDD1DDD0580x10 (0x30)PIND –PIND6PIND5PIND4PIND3PIND2PIND1PIND0580x0F (0x2F)USIDR USI Data Register1450x0E (0x2E)USISR USISIF USIOIF USIPF USIDC USICNT3USICNT2USICNT1USICNT01460x0D (0x2D)USICR USISIE USIOIE USIWM1USIWM0USICS1USICS0USICLK USITC 1470x0C (0x2C)UDR UART Data Register (8-bit)1300x0B (0x2B)UCSRA RXC TXC UDRE FE DORUPE U2X MPCM 1300x0A (0x2A)UCSRB RXCIE TXCIE UDRIE RXEN TXENUCSZ2RXB8TXB81320x09 (0x29)UBRRL UBRRH[7:0]1340x08 (0x28)ACSR ACD ACBG ACO ACI ACIE ACIC ACIS1ACIS01500x07 (0x27)Reserved ––––––––0x06 (0x26)Reserved ––––––––0x05 (0x25)Reserved ––––––––0x04 (0x24)Reserved ––––––––0x03 (0x23)UCSRC –UMSEL UPM1UPM0USBSUCSZ1UCSZ0UCPOL1330x02 (0x22)UBRRH ––––UBRRH[11:8]1340x01 (0x21)DIDR ––––––AIN1D AIN0D 1510x00 (0x20)Reserved––––––––7ATtiny2313/V2543IS–AVR–04/06Note:1.For compatibility with future devices, reserved bits should be written to zero if accessed. Reserved I/O memory addressesshould never be written.2.I/O Registers within the address range 0x00 - 0x1F are directly bit-accessible using the SBI and CBI instructions. In theseregisters, the value of single bits can be checked by using the SBIS and SBIC instructions.3.Some of the status flags are cleared by writing a logical one to them. Note that, unlike most other AVRs, the CBI and SBIinstructions will only operate on the specified bit, and can therefore be used on registers containing such status flags. The CBI and SBI instructions work with registers 0x00 to 0x1F only.4.When using the I/O specific commands IN and OUT , the I/O addresses 0x00 - 0x3F must be used. When addressing I/ORegisters as data space using LD and ST instructions, 0x20 must be added to these addresses.8ATtiny2313/V2543IS–AVR–04/06Instruction Set SummaryMnemonicsOperandsDescriptionOperation Flags#ClocksARITHMETIC AND LOGIC INSTRUCTIONSADD Rd, Rr Add two RegistersRd ← Rd + RrZ,C,N,V,H 1ADC Rd, Rr Add with Carry two Registers Rd ← Rd + Rr + C Z,C,N,V,H 1ADIW Rdl,K Add Immediate to Word Rdh:Rdl ← Rdh:Rdl + K Z,C,N,V,S 2SUB Rd, Rr Subtract two RegistersRd ← Rd - Rr Z,C,N,V,H 1SUBI Rd, K Subtract Constant from Register Rd ← Rd - K Z,C,N,V,H 1SBC Rd, Rr Subtract with Carry two Registers Rd ← Rd - Rr - C Z,C,N,V,H 1SBCI Rd, K Subtract with Carry Constant from Reg.Rd ← Rd - K - C Z,C,N,V,H 1SBIW Rdl,K Subtract Immediate from Word Rdh:Rdl ← Rdh:Rdl - K Z,C,N,V,S 2AND Rd, Rr Logical AND RegistersRd ← Rd • Rr Z,N,V 1ANDI Rd, K Logical AND Register and Constant Rd ← Rd • K Z,N,V 1OR Rd, Rr Logical OR RegistersRd ← Rd v Rr Z,N,V 1ORI Rd, K Logical OR Register and Constant Rd ← Rd v K Z,N,V 1EOR Rd, Rr Exclusive OR Registers Rd ← Rd ⊕ Rr Z,N,V 1COM Rd One’s Complement Rd ← 0xFF − Rd Z,C,N,V 1NEG Rd Two’s Complement Rd ← 0x00 − Rd Z,C,N,V,H 1SBR Rd,K Set Bit(s) in Register Rd ← Rd v KZ,N,V 1CBR Rd,K Clear Bit(s) in Register Rd ← Rd • (0xFF - K)Z,N,V 1INC Rd Increment Rd ← Rd + 1Z,N,V 1DEC Rd DecrementRd ← Rd − 1 Z,N,V 1TST Rd Test for Zero or Minus Rd ← Rd • Rd Z,N,V 1CLR Rd Clear Register Rd ← Rd ⊕ Rd Z,N,V 1SER Rd Set Register Rd ← 0xFF None 1BRANCH INSTRUCTIONSRJMP kRelative Jump PC ← PC + k + 1None 2IJMP Indirect Jump to (Z)PC ← Z None 2RCALL kRelative Subroutine Call PC ← PC + k + 1None 3ICALL Indirect Call to (Z)PC ←Z None 3RET Subroutine Return PC ← STACK None 4RETI Interrupt Return PC ← STACKI 4CPSE Rd,Rr Compare, Skip if Equal if (Rd = Rr) PC ← PC + 2 or 3None 1/2/3CP Rd,Rr CompareRd − Rr Z, N,V,C,H 1 CPC Rd,Rr Compare with CarryRd − Rr − C Z, N,V,C,H 1CPI Rd,K Compare Register with Immediate Rd − KZ, N,V,C,H 1SBRC Rr, b Skip if Bit in Register Cleared if (Rr(b)=0) PC ← PC + 2 or 3 None 1/2/3SBRS Rr, b Skip if Bit in Register is Set if (Rr(b)=1) PC ← PC + 2 or 3None 1/2/3SBIC P, b Skip if Bit in I/O Register Cleared if (P(b)=0) PC ← PC + 2 or 3 None 1/2/3SBIS P, b Skip if Bit in I/O Register is Set if (P(b)=1) PC ← PC + 2 or 3None 1/2/3BRBS s, k Branch if Status Flag Set if (SREG(s) = 1) then PC ←PC+k + 1None 1/2BRBC s, k Branch if Status Flag Cleared if (SREG(s) = 0) then PC ←PC+k + 1None 1/2BREQ k Branch if Equal if (Z = 1) then PC ← PC + k + 1None 1/2BRNE k Branch if Not Equal if (Z = 0) then PC ← PC + k + 1None 1/2BRCS k Branch if Carry Set if (C = 1) then PC ← PC + k + 1None 1/2BRCC k Branch if Carry Cleared if (C = 0) then PC ← PC + k + 1None 1/2BRSH k Branch if Same or Higher if (C = 0) then PC ← PC + k + 1None 1/2BRLO k Branch if Lower if (C = 1) then PC ← PC + k + 1None 1/2BRMI k Branch if Minus if (N = 1) then PC ← PC + k + 1None 1/2BRPL k Branch if Plusif (N = 0) then PC ← PC + k + 1None 1/2BRGE k Branch if Greater or Equal, Signed if (N ⊕ V= 0) then PC ← PC + k + 1None 1/2BRLT k Branch if Less Than Zero, Signed if (N ⊕ V= 1) then PC ← PC + k + 1None 1/2BRHS k Branch if Half Carry Flag Set if (H = 1) then PC ← PC + k + 1None 1/2BRHC k Branch if Half Carry Flag Cleared if (H = 0) then PC ← PC + k + 1None 1/2BRTS k Branch if T Flag Set if (T = 1) then PC ← PC + k + 1None 1/2BRTC k Branch if T Flag Cleared if (T = 0) then PC ← PC + k + 1None 1/2BRVS k Branch if Overflow Flag is Set if (V = 1) then PC ← PC + k + 1None 1/2BRVC k Branch if Overflow Flag is Cleared if (V = 0) then PC ← PC + k + 1None 1/2BRIE k Branch if Interrupt Enabled if ( I = 1) then PC ← PC + k + 1None 1/2BRID k Branch if Interrupt Disabled if ( I = 0) then PC ← PC + k + 1None 1/2BIT AND BIT-TEST INSTRUCTIONSSBI P,b Set Bit in I/O Register I/O(P,b) ←1None 2CBI P,b Clear Bit in I/O Register I/O(P,b) ← 0None 2LSL Rd Logical Shift Left Rd(n+1) ← Rd(n), Rd(0) ← 0Z,C,N,V 1LSR Rd Logical Shift Right Rd(n) ← Rd(n+1), Rd(7) ← 0Z,C,N,V 1ROLRd Rotate Left Through CarryRd(0)←C,Rd(n+1)← Rd(n),C ←Rd(7)Z,C,N,V19ATtiny2313/V2543IS–AVR–04/06ROR Rd Rotate Right Through CarryRd(7)←C,Rd(n)← Rd(n+1),C ←Rd(0)Z,C,N,V 1ASR Rd Arithmetic Shift Right Rd(n) ← Rd(n+1), n=0..6Z,C,N,V 1SWAP Rd Swap Nibbles Rd(3..0)←Rd(7..4),Rd(7..4)←Rd(3..0)None 1BSET s Flag Set SREG(s) ← 1SREG(s)1BCLR s Flag ClearSREG(s) ← 0 SREG(s)1BST Rr, b Bit Store from Register to T T ← Rr(b)T 1BLD Rd, bBit load from T to Register Rd(b) ← T None 1SEC Set Carry C ←1C 1CLC Clear Carry C ← 0 C 1SEN Set Negative Flag N ←1N 1CLN Clear Negative Flag N ← 0 N 1SEZ Set Zero Flag Z ← 1Z 1CLZ Clear Zero Flag Z ← 0 Z 1SEI Global Interrupt Enable I ←1I 1CLI Global Interrupt Disable I ← 0 I 1SES Set Signed Test Flag S ← 1S 1CLS Clear Signed Test FlagS ← 0 S 1SEV Set Twos Complement Overflow.V ← 1V 1CLV Clear Twos Complement Overflow V ← 0 V 1SET Set T in SREG T ←1T 1CLT Clear T in SREGT ← 0T 1SEH Set Half Carry Flag in SREGH ←1H 1CLHClear Half Carry Flag in SREGH ← 0H1DATA TRANSFER INSTRUCTIONS MOV Rd, Rr Move Between RegistersRd ← Rr None 1MOVW Rd, Rr Copy Register Word Rd+1:Rd ← Rr+1:Rr None 1LDI Rd, K Load Immediate Rd ← KNone 1LD Rd, X Load Indirect Rd ← (X)None 2LD Rd, X+Load Indirect and Post-Inc.Rd ← (X), X ← X + 1None 2LD Rd, - X Load Indirect and Pre-Dec.X ← X - 1, Rd ← (X)None 2LD Rd, Y Load IndirectRd ← (Y)None 2LD Rd, Y+Load Indirect and Post-Inc.Rd ← (Y), Y ← Y + 1None 2LD Rd, - Y Load Indirect and Pre-Dec.Y ← Y - 1, Rd ← (Y)None 2LDD Rd,Y+q Load Indirect with Displacement Rd ← (Y + q)None 2LD Rd, Z Load Indirect Rd ← (Z)None 2LD Rd, Z+Load Indirect and Post-Inc.Rd ← (Z), Z ← Z+1None 2LD Rd, -Z Load Indirect and Pre-Dec.Z ← Z - 1, Rd ← (Z)None 2LDD Rd, Z+q Load Indirect with Displacement Rd ← (Z + q)None 2LDS Rd, k Load Direct from SRAM Rd ← (k)None 2ST X, Rr Store Indirect(X) ← RrNone 2ST X+, Rr Store Indirect and Post-Inc.(X) ← Rr, X ← X + 1None 2ST - X, Rr Store Indirect and Pre-Dec.X ← X - 1, (X) ← Rr None 2ST Y, Rr Store Indirect(Y) ← RrNone 2ST Y+, Rr Store Indirect and Post-Inc.(Y) ← Rr, Y ← Y + 1None 2ST - Y, Rr Store Indirect and Pre-Dec.Y ← Y - 1, (Y) ← Rr None 2STD Y+q,Rr Store Indirect with Displacement (Y + q) ← Rr None 2ST Z, Rr Store Indirect(Z) ← RrNone 2ST Z+, Rr Store Indirect and Post-Inc.(Z) ← Rr, Z ← Z + 1None 2ST -Z, Rr Store Indirect and Pre-Dec.Z ← Z - 1, (Z) ← Rr None 2STD Z+q,Rr Store Indirect with Displacement (Z + q) ← Rr None 2STS k, RrStore Direct to SRAM (k) ← Rr None 2LPM Load Program Memory R0 ← (Z)None 3LPM Rd, Z Load Program MemoryRd ← (Z)None 3LPM Rd, Z+Load Program Memory and Post-Inc Rd ← (Z), Z ← Z+1None 3SPM Store Program Memory (Z) ← R1:R0None -IN Rd, P In Port Rd ←P None 1OUT P, Rr Out PortP ← Rr None 1PUSH Rr Push Register on Stack STACK ← Rr None 2POP Rd Pop Register from Stack Rd ← STACKNone 2MCU CONTROL INSTRUCTIONSNOP No Operation None 1SLEEP Sleep(see specific descr. for Sleep function)None 1WDR Watchdog Reset (see specific descr. for WDR/timer)None 1BREAKBreakFor On-chip Debug Only NoneN/AMnemonicsOperandsDescriptionOperationFlags#Clocks10ATtiny2313/V2543IS–AVR–04/06Ordering InformationNote:1.This device can also be supplied in wafer form. Please contact your local Atmel sales office for detailed ordering informationand minimum quantities.2.Pb-free packaging alternative, complies to the European Directive for Restriction of Hazardous Substances (RoHS direc-tive).Also Halide free and fully Green.3.For Speed vs. V CC, see Figure 82 on page 181 and Figure 83 on page 181.Speed (MHz)(3)Power SupplyOrdering Code Package (1)Operation Range10 1.8 - 5.5VA Ttiny2313V-10PI A Ttiny2313V-10PU (2)A Ttiny2313V-10SI A Ttiny2313V-10SU (2)A Ttiny2313V-10MU (2)20P320P320S 20S 20M1Industrial (-40°C to 85°C)20 2.7 - 5.5VA Ttiny2313-20PI A Ttiny2313-20PU (2)A Ttiny2313-20SI A Ttiny2313-20SU (2)A Ttiny2313-20MU (2)20P320P320S 20S 20M1Industrial (-40°C to 85°C)Package Type20P320-lead, 0.300" Wide, Plastic Dual Inline Package (PDIP)20S 20-lead, 0.300" Wide, Plastic Gull Wing Small Outline Package (SOIC)20M120-pad, 4 x 4 x 0.8 mm Body, Quad Flat No-Lead/Micro Lead Frame Package (MLF)11ATtiny2313/V2543IS–AVR–04/06Packaging Information20P312ATtiny2313/V2543IS–AVR–04/0620S13ATtiny2313/V2543IS–AVR–04/0620M114ATtiny2313/V2543IS–AVR–04/06ErrataThe revision in this section refers to the revision of the ATtiny2313 device.ATtiny2313 Rev B•Wrong values read after Erase Only operation •Parallel Programming does not work •Watchdog Timer Interrupt disabled•EEPROM can not be written below 1.9 volts1.Wrong values read after Erase Only operationAt supply voltages below 2.7 V, an EEPROM location that is erased by the Erase Only operation may read as programmed (0x00).Problem Fix/WorkaroundIf it is necessary to read an EEPROM location after Erase Only, use an Atomic Write operation with 0xFF as data in order to erase a location. In any case, the Write Only operation can be used as intended. Thus no special considerations are needed as long as the erased location is not read before it is programmed.2.Parallel Programming does not workParallel Programming is not functioning correctly. Because of this, reprogramming of the device is impossible if one of the following modes are selected: –In-System Programming disabled (SPIEN unprogrammed)–Reset Disabled (RSTDISBL programmed)Problem Fix/WorkaroundSerial Programming is still working correctly. By avoiding the two modes above, the device can be reprogrammed serially.3.Watchdog Timer Interrupt disabledIf the watchdog timer interrupt flag is not cleared before a new timeout occurs, the watchdog will be disabled, and the interrupt flag will automatically be cleared. This is only applicable in interrupt only mode. If the Watchdog is configured to reset the device in the watchdog time-out following an interrupt, the device works correctly.Problem fix / WorkaroundMake sure there is enough time to always service the first timeout event before a new watchdog timeout occurs. This is done by selecting a long enough time-out period.4.EEPROM can not be written below 1.9 voltsWriting the EEPROM at V CC below 1.9 volts might fail.Problem fix / WorkaroundDo not write the EEPROM when V CC is below 1.9 volts.ATtiny2313 Rev ARevision A has not been sampled.15ATtiny2313/V2543IS–AVR–04/06Datasheet Revision HistoryPlease note that the referring page numbers in this section are referred to this docu-ment. The referring revision in this section are referring to the document revision.Changes from Rev. 2514H-02/05 to Rev. 2514I-04/06Changes from Rev. 2514G-10/04 to Rev. 2514H-02/05Changes from Rev. 2514F-08/04 to Rev. 2514G-10/04Changes from Rev. 2514E-04/04 to Rev. 2514F-08/041.Updated typos.2.Updated Figure 1 on page 2.3Added “Resources” on page 6.4.Updated “Default Clock Source” on page 25.5.Updated “128 kHz Internal Oscillator” on page 30.6.Updated “Power Management and Sleep Modes” on page 337.Updated Table 3 on page 25,Table 13 on page 33, Table 14 on page 34,Table 19 on page 45, Table 31 on page 63, Table 79 on page 180.8.Updated “External Interrupts” on page 62.9.Updated “Bit 7..0 – PCINT7..0: Pin Change Enable Mask 7..0” on page 65.10.Updated “Bit 6 – ACBG: Analog Comparator Bandgap Select” on page 153.11.Updated “Calibration Byte” on page 164.12.Updated “DC Characteristics” on page 181.13.Updated “Register Summary” on page 6.14.Updated “Ordering Information” on page 10.15.Changed occurences of OCnA to OCFnA, OCnB to OCFnB and OC1x to OCF1x.1.Updated Table 6 on page 24, Table 15 on page 34, Table 68 on page 161and Table 80 on page 180.2.Changed CKSEL default value in “Default Clock Source” on page 22 to 8 MHz.3.Updated “Programming the Flash” on page 166, “Programming the EEPROM” on page 168 and “Enter Programming Mode” on page 164.4.Updated “DC Characteristics” on page 178.5.MLF option updated to “Quad Flat No-Lead/Micro Lead Frame (QFN/MLF)”1.Updated “Features” on page 1.2.Updated “Pinout ATtiny2313” on page 2.3.Updated “Ordering Information” on page 10.4.Updated “Packaging Information” on page 11.5.Updated “Errata” on page 14.1.Updated “Features” on page 1.2.Updated “Alternate Functions of Port B” on page 53.3.Updated “Calibration Byte” on page 161.16ATtiny2313/V2543IS–AVR–04/06Changes from Rev. 2514D-03/04 to Rev. 2514E-04/04Changes from Rev. 2514C-12/03 to Rev. 2514D-03/04Changes from Rev. 2514B-09/03 to Rev. 2514C-12/03Changes from Rev. 2514A-09/03 to Rev. 2514B-09/034.Moved Table 69 on page 161 and Table 70 on page 162 to “Page Size”on page 161.5.Updated “Enter Programming Mode” on page 164.6.Updated “Serial Programming Algorithm” on page 174.7.Updated Table 78 on page 175.8.Updated “DC Characteristics” on page 178.9.Updated “ATtiny2313 Typical Characteristics” on page 182.10.Changed occurences of PCINT15 to PCINT7, EEMWE to EEMPE and EEWE to EEPE in the document.1.Speed Grades changed - 12MHz to 10MHz - 24MHz to 20MHz2.Updated Figure 1 on page 2.3.Updated “Ordering Information” on page 10.4.Updated “Maximum Speed vs. V CC ” on page 181.5.Updated “ATtiny2313 Typical Characteristics” on page 182.1.Updated Table 2 on page 22.2.Replaced “Watchdog Timer” on page 39.3.Added “Maximum Speed vs. V CC ” on page 181.4.“Serial Programming Algorithm” on page 174 updated.5.Changed mA to µA in preliminary Figure 136 on page 208.6.“Ordering Information” on page 10 updated. MLF package option removed7.Package drawing “20P3” on page 11 updated.8.Updated C-code examples.9.Renamed instances of SPMEN to SELFPRGEN, Self Programming Enable.1.Updated “Calibrated Internal RC Oscillator” on page 24.1.Fixed typo from UART to USART and updated Speed Grades and Power Consumption Estimates in “Features” on page 1.2.Updated “Pin Configurations” on page 2.3.Updated Table 15 on page 34 and Table 80 on page 180.4.Updated item 5 in “Serial Programming Algorithm” on page 174.5.Updated “Electrical Characteristics” on page 178.6.Updated Figure 82 on page 181 and added Figure 83 on page 181.7.Changed SFIOR to GTCCR in “Register Summary” on page 6.8.Updated “Ordering Information” on page 10.9.Added new errata in “Errata” on page 14.2543IS–AVR–04/06© Atmel Corporation 2006. All rights reserved. Atmel ®, logo and combinations thereof, Everywhere You Are ®, AVR ®, AVR Studio ®, and others,are registered trademarks or trademarks of Atmel Corporation or its subsidiaries. Other terms and product names may be trademarks of others.Disclaimer: The information in this document is provided in connection with Atmel products. No license, express or implied, by estoppel or otherwise,to any intellectual property right is granted by this document or in connection with the sale of Atmel products. EXCEPT AS SET FORTH IN ATMEL ’S TERMS AND CONDI-TIONS OF SALE LOCATED ON ATMEL ’S WEB SITE, ATMEL ASSUMES NO LIABILITY WHATSOEVER AND DISCLAIMS ANY EXPRESS, IMPLIED OR STATUTORY WARRANTY RELATING TO ITS PRODUCTS INCLUDING, BUT NOT LIMITED TO, THE IMPLIED WARRANTY OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE, OR NON-INFRINGEMENT. IN NO EVENT SHALL ATMEL BE LIABLE FOR ANY DIRECT, INDIRECT, CONSEQUENTIAL, PUNITIVE, SPECIAL OR INCIDEN-TAL DAMAGES (INCLUDING, WITHOUT LIMITATION, DAMAGES FOR LOSS OF PROFITS, BUSINESS INTERRUPTION, OR LOSS OF INFORMATION) ARISING OUT OF THE USE OR INABILITY TO USE THIS DOCUMENT, EVEN IF ATMEL HAS BEEN ADVISED OF THE POSSIBILITY OF SUCH DAMAGES. Atmel makes no representations or warranties with respect to the accuracy or completeness of the contents of this document and reserves the right to make changes to specifications and product descriptions at any time without notice. Atmel does not make any commitment to update the information contained herein. Unless specifically provided otherwise, Atmel products are not suitable for, and shall not be used in, automotive applications. Atmel’s products are not intended, authorized, or warranted for use as components in applications intended to support or sustain life.Atmel CorporationAtmel Operations2325 Orchard Parkway San Jose, CA 95131, USA Tel: 1(408) 441-0311Fax: 1(408) 487-2600Regional HeadquartersEuropeAtmel SarlRoute des Arsenaux 41Case Postale 80CH-1705 Fribourg SwitzerlandTel: (41) 26-426-5555Fax: (41) 26-426-5500AsiaRoom 1219Chinachem Golden Plaza 77 Mody Road Tsimshatsui East Kowloon Hong KongTel: (852) 2721-9778Fax: (852) 2722-1369Japan9F, Tonetsu Shinkawa Bldg.1-24-8 ShinkawaChuo-ku, Tokyo 104-0033JapanTel: (81) 3-3523-3551Fax: (81) 3-3523-7581Memory2325 Orchard Parkway San Jose, CA 95131, USA Tel: 1(408) 441-0311Fax: 1(408) 436-4314Microcontrollers2325 Orchard Parkway San Jose, CA 95131, USA Tel: 1(408) 441-0311Fax: 1(408) 436-4314La Chantrerie BP 7060244306 Nantes Cedex 3, France Tel: (33) 2-40-18-18-18Fax: (33) 2-40-18-19-60ASIC/ASSP/Smart CardsZone Industrielle13106 Rousset Cedex, France Tel: (33) 4-42-53-60-00Fax: (33) 4-42-53-60-011150 East Cheyenne Mtn. Blvd.Colorado Springs, CO 80906, USA Tel: 1(719) 576-3300Fax: 1(719) 540-1759Scottish Enterprise Technology Park Maxwell BuildingEast Kilbride G75 0QR, Scotland Tel: (44) 1355-803-000Fax: (44) 1355-242-743RF/AutomotiveTheresienstrasse 2Postfach 353574025 Heilbronn, Germany Tel: (49) 71-31-67-0Fax: (49) 71-31-67-23401150 East Cheyenne Mtn. Blvd.Colorado Springs, CO 80906, USA Tel: 1(719) 576-3300Fax: 1(719) 540-1759Biometrics/Imaging/Hi-Rel MPU/High Speed Converters/RF DatacomAvenue de Rochepleine BP 12338521 Saint-Egreve Cedex, France Tel: (33) 4-76-58-30-00Fax: (33) 4-76-58-34-80Literature Requests/literature。
周立功单片机 MPQ4569电源芯片功能测试报告(in6.2-75 out5 科达嘉SP53-330K)
3.2.2 测试方式...........................................................................................................5
3.2.3 测试数据...........................................................................................................5
3.1
转换效率 ................................................................................................................... 3
3.1.1 测试目的...........................................................................................................3
2.1
芯片简介 ................................................................................................................... 2
2.2
芯片应用 ................................................................................................................... 2
3.2
输入电压范围 ........................................................................................................... 5
001(单片机)
硬件
微 型 计 算 机 系 统
软件
外围设备 辅助设备
系统软件(操作系统,编辑、编译程序,故障诊断,监控程序…) 应用软件(科学计算,工业控制,数据处理…) 程序设计语言(机器语言、汇编语言、高级语言)
微处理器加上同样采用大规模集成电路 制成的用于存储程序和数据的存储器,以及与 输入输出设备相衔接的输入输出接口电路就构 成了微型计算机(Microcomputer)
李朝青编著单片机原理及接口技术北京航空航天大学出版社参考网址wwwzlgmcucom周立功单片机wwwchnsoftnet单片机学习网站本课程是一门实践性应用性很强的学科仅仅听懂还不够重在培养动手能力硬件软件同样重要不可偏废硬件是骨架软件是皮肉器脏及思想本课程的前期基础课程是数字电路与微机原理这方面知识掌握得不够好的请自己补上预习听课复习作业实验环环都重要用科学的方法学习本章要点
⒊ 十六进制数
主要特点: ① 基数是16。共有16个数符构成: 0、1、„、9、A、B、C、D、E、F。其中, A、B、C、D、E、F 代表的数值分别为 10、11、12、13、14、15。
② 进位规则是“逢十六进一”。
十六进制数用尾缀H表示。 【例】A3.4H = 10×161+3×160+4×16-1 = 160+3+0.25 = 163.25 其中,163、162、161、160、16-1、16-2 称为十六进制数各数位的“权”。
单片机与PC机之异同(2)
功能:
PC机: 数据运算、采集、处理、存储、传输; 单片机:控制(或受控于)外设。
通用计算机擅长于数据运算、采集、处理、 存储和传输; 单片机的专长则是测控,往往嵌入某个仪器/ 设备/系统中,使其达到智能化的效果。
M28A-T系列核心板数据手册_V1.00

广州周立功单片机科技有限公司修订历史目录1. 产品简介 (1)1.1产品特性 (1)1.2产品命名 (2)1.3产品选型 (2)1.4性能参数 (3)2. 硬件结构 (5)2.1I/O引脚信息 (5)2.2管脚说明(按管脚顺序划分) (6)2.3管脚说明(按功能定义划分) (11)2.4管脚说明(按管脚复用划分) (14)3. 电气参数 (18)3.1供电参数 (18)3.2PSWITCH输入特性 (18)3.3GPIO电气参数 (18)3.4ADC电气特性 (19)4. 典型应用 (20)5. 产品图片 (21)6. 机械尺寸 (22)7. 免责声明 (23)1. 产品简介MiniARM M28A-T核心板是广州周立功单片机科技有限公司精心设计的一款低功耗、高性能的核心板。
核心板处理器采用飞思卡尔基于ARM9内核的i.MX28系列芯片,主频454MHz,支持UART、I2C、I2S、Ethernet、USB、SSP等众多通讯接口,并支持16位TFT 液晶显示和电阻式触摸屏,适用于通用嵌入式工业控制和消费电子市场。
处理器集成电源管理单元,可有效简化系统电源设计,降低成本,减小系统功耗,使得该处理器非常适用于低成本、低功耗、高性能的便携设备。
MiniARM M28A-T核心板集成了DDR2、NAND Flash、硬件看门狗等,可有效缩短用户基于M28A-T核心板进行产品开发的周期。
核心板通过严格的EMC和高低温测试,保证核心板在严酷的环境下也能稳定工作。
1.1 产品特性◆CPU:Freescale i.MX283/ i.MX287;◆运行频率:454MHz;◆支持64/128M DDR2;◆支持64/128MB NAND FLASH;◆内置电源管理单元-PMU;◆内置TCP/IP协议栈;◆支持独立硬件看门狗;◆支持多种文件系统,支持SD/MMC卡、U盘读写;◆支持1路USB2.0 HOST、1路USB2.0 OTG;◆支持2路10M/100M以太网接口,支持交换机功能;◆支持多达6路串口、2路CAN;◆支持1路SD Card接口,1路SDIO;◆1路I²C、1路SPI、1路I²S及4路12位ADC;◆内置LCD控制器,分辨率最高达800×480;◆支持4线电阻式触摸屏接口;◆支持JTAG调试接口;◆支持多种升级方式;◆采用6层PCB工艺;◆尺寸30mm×48mm;◆低工作电压:3.3V±2%;◆采用高精度板对板连接器;◆所有元器件均符合工业级-40℃~+85℃要求。
广州周立功单片机 LPC1100系列微控制器 说明书
L P C1100系列微控制器第第十十六六章章模模数数转转换换器器用用户户手手册册R R e e v v11..0000地址:广州市天河北路689号光大银行大厦12楼F4网址:销售与服务网络广州周立功单片机发展有限公司地址:广州市天河北路689号光大银行大厦12楼F4 邮编:510630 电话:(020)38730972 38730976 38730916 38730917 38730977 传真:(020)38730925网址:广州专卖店地址:广州市天河区新赛格电子城203-204室电话:(020)87578634 87569917传真:(020)87578842南京周立功地址:南京市珠江路280号珠江大厦2006室电话:(025)83613221 83613271 83603500 传真:(025)83613271北京周立功地址:北京市海淀区知春路113号银网中心A座1207-1208室(中发电子市场斜对面)电话:(010)62536178 62536179 82628073传真:(010)82614433 重庆周立功地址:重庆市石桥铺科园一路二号大西洋国际大厦(赛格电子市场)1611室电话:(023)68796438 68796439传真:(023)68796439杭州周立功地址:杭州市天目山路217号江南电子大厦502室电话:(0571)28139611 28139612 2813961328139615 28139616 28139618传真:(0571)28139621 成都周立功地址:成都市一环路南二段1号数码同人港401室(磨子桥立交西北角)电话:(028)85439836 85437446传真:(028) 85437896深圳周立功地址:深圳市深南中路 2070号电子科技大厦C座4楼D室电话:(0755)83781788(5线)传真:(0755)83793285 武汉周立功地址:武汉市洪山区广埠屯珞瑜路158号12128室(华中电脑数码市场)电话:(027)87168497 87168297 87168397传真:(027)87163755上海周立功地址:上海市北京东路668号科技京城东座7E室电话:(021)53083452 53083453 53083496传真:(021)53083491西安办事处地址:西安市长安北路54号太平洋大厦1201室电话:(029)87881296 83063000 87881295传真:(029)87880865目录第16章 ADC (2)16.1 本章导读 (2)16.2 特性 (2)16.3 管脚描述 (2)16.4 时钟供应和功率控制 (2)16.5 寄存器描述 (2)16.5.1 A/D控制寄存器 (3)16.5.2 A/D全局数据寄存器 (5)16.5.3 A/D状态寄存器 (5)16.5.4 A/D中断使能寄存器 (5)16.5.5 A/D数据寄存器 (6)16.6 操作 (6)16.6.1 硬件触发转换 (6)16.6.2 中断 (6)16.6.3 精度和数字接收器 (6)第16章ADC 16.1 本章导读所有LPC1100系列ARM的ADC块都相同。
TFT-4.3 数据手册V1.00

广州周立功单片机科技有限公司
TFT-4.3
液晶套件
1.1 主要产品特性
产品类别 外形尺寸 有效显示区域尺寸 液晶屏类型
LCM 显示色彩 分辨率(宽×高) 对比度 响应时间 可视角度 背光类型 背光亮度
工作环境
用户接口 触摸屏
1.2 环境参数
表 1.1 产品特性
标准型(Standard)
126.0(长)mm × 80.0(宽)mm × 13.8(厚)mm
3.2 温湿度测试
放电极性 +/+/-
表 3.2 湿度测试
项目 高温工作 低温工作
60℃,4 小时 -20℃,4 小时
测试条件
测试现象 自恢复正常显示
正常显示
测试结果 通过 通过
测试结果 工作正常 工作正常
产品数据手册
©2013 Guangzhou ZLG MCU Technology Co., Ltd. 4
TFT-4.3 使用了 4.3 英寸TFT真彩液晶屏,使用广州周立功单片机科技有限公司自定义的 数据接口,带有 4 线电阻触摸屏;拥有宽屏幕、高亮度、低功耗的优越性能。产品实物如图 1.1和图 1.2所示。
图 1.1 产品实物——正面
图 1.2 产品实物——背面
产品数据手册
©2013 Guangzhou ZLG MCU Technology Co., Ltd. 1
图 2.1 引脚接口图
表 2.1 引脚说明
引脚
名称
1、2
VCC(5V)
3 4、5
GND VDD_LCD(3.3V)
6
TS_XM
7
TS_XP
8
TS_YM
9 10、11
广州周立功单片机 MagicARM2200-S 教学实验开发平台 说明书
第1章 MagicARM2200-S教学实验开发平台1.1总体特性MagicARM2200-S是专为高校嵌入式系统教学精心打造的ARM嵌入式教学实验开发平台,支持多种嵌入式操作系统,提供丰富的配套教材和众多的实验例程,提供多种的商业化软件包,并配备精心设计的多媒体教学课件,是高校嵌入式系统创新实验室首选平台。
z多种可选嵌入式硬件开发平台¾ARM7微处理器(LPC2210/2212/2214/2220/2290/2292/2294)¾ARM9微处理器(LPC3000系列ARM微处理器)z支持多种可选嵌入式操作系统¾μC/OS-II嵌入式实时操作系统(ARM7/ARM9)¾μCLinux操作系统(ARM7)¾Linux/操作系统(ARM9)z配套丰富的教材《ARM嵌入式系统基础教程》(标配)《MagicARM2200-S教学实验开发平台实验指导(上册)》(标配)《MagicARM2200-S教学实验开发平台实验指导(下册)》(标配)《ARM嵌入式软件开发实例(一)》(选配)《ARM嵌入式软件开发实例(二)》(选配)《ARM嵌入式µCLinux系统构建与驱动开发范例》(选配)《ARM嵌入式MiniGUI初步与应用开发范例》(选配)z多媒体教学课件¾耗时半年之久,倾力制作¾大量动画突出重点和难点,层层剥笋由浅入深¾紧扣教材主线,任君裁剪z丰富翔实的联机实验指导¾在本机上运行,无需电脑。
¾可以从多种介质中启动程序,方便扩充。
¾支持从内部FALSH、CF卡/硬盘。
¾内容丰富,可部分替代实验教材。
¾可直接运行实验程序,察看运行效果。
z附带众多源码和软件包¾众多实验例程和源代码¾众多商业化软件包z免费捆绑MiniGUI学习版软件(单独销价129元)¾北京飞漫出品,周立功公司独家代理¾提供MiniGUI for µCLinux移植实验,MiniGUI应用实例¾免费提供MiniGUI-STR软件包z可进实现近众多项实验课题¾基础实验¾扩展实验¾基于μC/OS-II的基础实验¾基于μCLinux基础实验¾MiniGUI图形界面实验¾课程设计¾毕业设计1.2产品外观实验箱和配套资料1.3主板介绍MagicARM2200-S主板图片见附录部分。
广州周立功单片机 iC总线概要 应用手册
文件信息 类别内容关键词I 2C 总线、概要摘要现在,已经有越来越多的外围器件与微控制器的接口形式是二线制的I 2C 串行总线,学会其基本操作已经成为广大电子电气工程师和爱好者的迫切要求。
鉴于I 2C 总线协议原文内容十分详尽,对于总线协议的初学者可能不易把握,本文特意非常简要地介绍了I 2C 总线的概念、优点和基础协议,可以帮助您尽快掌握具体器件的用法,也为进一步深入学习掌握I 2C 总线打好基础。
广州周立功单片机发展有限公司周立功单片机技术支持如果您对文档中的产品感兴趣,或者对文档有所疑问,您可以在办公时间(星期一至星期五上午8:30~11:50;下午1:30~5:30;星期六上午8:30~11:50)拨打技术支持电话或E-mail 联系。
网址: 联系电话:+86 (020) 22644358 22644359 22644360 22644361E-mail:zlgmcu.support@销售与服务网络广州周立功单片机发展有限公司地址:广州市天河北路689号光大银行大厦15楼F1 邮编:510630电话:(020)38730916 38730917 38730976 38730977传真:(020)38730925网址:广州专卖店地址:广州市天河区新赛格电子城203-204室电话:(020)87578634 87569914传真:(020)87578842南京周立功地址:南京市珠江路280号珠江大厦2006室电话:(025)83613221 83613271 83603500 传真:(025)83613271北京周立功地址:北京市海淀区知春路113号银网中心715室(中发电子市场斜对面)电话:(010)62536178 62536179 82628073传真:(010)82614433 重庆周立功地址:重庆市石桥铺科园一路二号大西洋国际大厦(赛格电子市场)1115室电话:(023)68796438 68796439传真:(023)68796439杭州周立功地址:杭州市登云路428号浙江时代电子市场205号电话:(0571)88009205 88009932 88009933传真:(0571)88009204成都周立功地址:成都市一环路南一段57号金城大厦612室电话:(028)85399320 85437446传真:(028)85439505深圳周立功地址:深圳市深南中路 2070号电子科技大厦A座24楼2403室电话:(0755)83781768 83781788 83782922传真:(0755)83793285武汉周立功地址:武汉市洪山区广埠屯珞瑜路158号12128室(华中电脑数码市场)电话:(027)87168497 87168297 87168397传真:(027)87163755上海周立功地址:上海市北京东路668号科技京城东座7E室电话:(021)53083452 53083453 53083496传真:(021)53083491西安办事处地址:西安市长安北路54号太平洋大厦1201室电话:(029)87881296 83063000 85399492传真:(029)87880865I2C总线概要现在,已经有越来越多的外围器件与微控制器的接口形式是二线制的I2C串行总线,学会其基本操作已经成为广大电子电气工程师和爱好者的迫切要求。
广州周立功单片机 NETCOM-10S M 产品说明书

NETCOM-10S/M 产品使用说明书Version 1.0目录第1章NETCOM-10 功能简介 (3)第2章NETCOM-10 硬件电路说明 (5)第3章硬件连接使用说明 (8)第4章软件配置使用说明 (9)第5章网页配置说明 (24)附录1 TCP和UDP中默认已经被占用的端口列表 (31)附录2 NETCOM-10速度测试结果 (32)附录3 技术支持E-MAIL及产品问题报告表 (33)附录4产品返修程序 (35)第1章NETCOM-10 模块功能简介NETCOM-10是周立功公司开发的一款TCP/IP以太网转串口设备,它内部集成了TCP/IP协议栈,用户利于它可以轻松完成嵌入式设备的网络功能,节省人力物力和开发时间,使产品更快的投入市场,增强竞争力。
功能特点:z RS232(或RS485/RS422)to 10M Ethernet,Serial最大波特率为230400 bps;z可利用Web browser和Windows utility 轻松进行设定;z TCP Server,TCP Client, UDP, Real COM ,Group组播,TCP Auto等作业模式;z支持动态(DHCP) ;或静态获取IP地址;产品特性:z 32位ARM7 CPU;z 16KB RAM;z 256KB FLASH;z 10M以太网RJ45接口;z 1.5KV 电磁隔离;z NETCOM-10S为RS232三线方式,NETCOM-10M为RS485/RS422,波特率300~230400 bps;z串口任意校验;z串口数据位5,6,7,8可设定;z串口停止位1,2位可设定;z支持TCP/IP协议包括:ETHERNET、ARP、IP、ICMP、IGMP、UDP、TCP、HTTP、DHCP;z工作方式可选择为TCP Server, TCP Client, UDP, Real COM driver,Group Mode,TCP Auto,组播地址、工作端口、目标IP和端口均可设定,支持PairConnection 对连方式工作;z提供JAVA控制库,用户可编写自己的网页进行控制,提供112KB字节网页下载空间;z提供Real COM driver模式下的管理软件,可动态修改串口参数,真正实现虚拟串口;z提供Group Mode组播模式下的数据分组广播,实现多机通讯;z提供串口起始字节和结束字节分包功能;z可使用配置工具ZnetCom Utility for Windows98/me/NT/2000/XP进行配置;z另外提供通用配置函数库,方便用户使用VC、VB、Delphi和C++ Builder开发应用程序z可使用网页浏览器进行配置;z输入电压9~30Vz功耗低最大工作电流 95 mAz工作温度0~65ºCz保存温度-25~85ºC第2章NETCOM-10硬件电路说明下面我们分别介绍NETCOM-10的接口的使用。
周立功单片机 MPQ2013数据手册(中文)-V1.00
1.3
应用
工业/汽车应用; 便携式/电池供电设备; 极低功耗微控制器; 移动手机; 医学成像。
1.4
典型应用
MPQ2013 数据手册 1
©2015 Guangzhou ZLGMCU Technology CO., LTD.
广州周立功单片机科技有限公司
MPQ2013 数据手册
1.5
订购信息
器件型号* MPQ2013GQ MPQ2013GG MPQ2013GJ** MPQ2013GQ-33** MPQ2013GQ-AEC1 MPQ2013GJ-AEC1** MPQ2013GQ-33-AEC1** 封装 QFN-8 (3mmx3mm) QFN-6 (2mmx2mm) TSOT23-5 QFN-8 (3mmx3mm) QFN-8 (3mmx3mm) TSOT23-5 QFN-8 (3mmx3mm) 顶部标识 AFF AX AFF AGG AFF AFF AGG
1.2
特性
2.5V~40V 输入范围; 3.2A 静态电源电流; 采用低值输出陶瓷电容(>0.47F)时保持稳定; 150mA 指定电流; 150mA 负载时压差为 620mV; 可使用固定输出和可调节输出(1.215V~15V) ; 输出精度为±2%; 指定电流限制; 热关断; 指定的结温范围为-40℃~+125℃; 采用 TSOT23-5、QFN6 (2x2mm)或 QFN8 (3x3mm)封装; 满足 AEC-Q100 Grade 1 标准。
广州周立功单片机科技有限公司
目 录
MPQ2013:40V、150mA 低静态电流线性稳压器· · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · ·1
广州周立功单片机 ISA-5420 智能 CAN 接口卡 说明书 V1.0
ISA-5420智能CAN接口卡用户手册 V1.0广州周立功单片机发展有限公司2003年12月18日目录一 功能特点---------------------------------------------------------------1 三 设备安装---------------------------------------------------------------24.1 硬件安装------------------------------------------------------------24.2 DB9针型插座引脚定义----------------------------------------------34.3 随卡软件包的安装---------------------------------------------------44.3.1 安装软件包------------------------------------------------------------------------44.3.2 安装驱动程序----------------------------------------------------------------------44.3.2.1 在Win98/Me系统下安装-------------------------------------------------------44.3.2.2 在DOS下安装------------------------------------------------------------------9 五 测试工具-------------------------------------------------------------22 七 产品服务-------------------------------------------------------------238.1 保修期--------------------------------------------------------------238.2 保修政策包括的范围---------------------------------------------------238.3 保修政策不包括的范围-------------------------------------------------238.4 软件升级----------------------------------------------------------------------------238.5 技术支持----------------------------------------------------------------------------23附录ACAN2.0B协议帧格式-------------------------------------------------26 附录C一其产权受国家拷贝法律绝对保护其他公司代理商及个人不得非法使用和您若需要我公司产品及相关信息我们将热情接待二它使PC机方便地连接到CAN总线上ISA-5420智能CAN接口卡采用标准ISA接口接口卡上自带光电隔离模块增强系统在恶劣环境中使用的可靠性Win98/Me下工作的驱动程序使开发简单化C++BuilderVB三图 3.1 ISA-5420智能CAN接口卡3.2 参数l 板载数据存储器 l CAN控制器 l CAN收发器 l 数据传送速率范围在5Kbit/sl CAN通讯接口符合DeviceNET和CANopen标准CAN 2.0B规范l 最高帧流量1000VDCl物理尺寸 98mmDOSISA3.3 软件支持 ISAÖ§³ÖWin98/Me 操作系统实现CAN 协议2.0B 规范的数据通讯5420智能CAN 接口卡提供功能强大的接口函数库文件5420智能CAN 接口卡自由发放相应的驱动程序及应用程序文件5420智能CAN 接口卡还支持DOS 下大模式的静态库3.4 产品清单 l ISADLL 库使用例程1份lISAÑ¡¼þÉ豸°²×°4.1 硬件安装l ISA-5420智能CAN 接口卡是属于静电敏感产品因此请注意采取必要的防护措施在PC 不通电的状态下将ISA-5420智能CAN 接口卡插入任一空闲的ISA 插槽同样l 在实物板卡上通过跳线JP2设置中断号总共有4位开关ON打到另一边表示1图4.1 选址内存范围内存范围表格如下所示H-6 0 1 1 0 0x0d8000 H-7 0 1 1 1 0x0dc000 H-8 1 0 0 0 0x0e0000 H-9 1 0 0 1 0x0e4000 H-A 1 0 1 0 0x0e8000 H-B 1 0 1 1 0x0ec000 设置中断号的图表如下图4.2 选址中断号中断号只能选择其中一个当前的跳线处在位置可供选择的还有IRQ3IRQ10IRQ12IRQ15请勿带电插拔ISA-5420接口卡防止静电损坏器件分别通过CZ1CZ1¹Ü½ÅÐźŶ¨ÒåÈç±í4.1所示表4.2 CAN连接器DB9针型插座引脚号信号功能2 CAN_L CAN_L 信号线7 CAN_H CAN_H 信号线349 空未用用户可以通过选配的DB9_OPEN5转换器CZ2的信号连接至5引脚的DeviceNET 或 CANopen 网络介绍OPEN5插座的输出信号V CAN_H屏蔽线CAN_LV红色P.M.S#207C白色EIA935A 线缆限制蓝色P.M.S.#297C 黑色P.M.S.#426CÈ»ºó°²×°Ä¿Â¼下的驱动程序4.3.2 安装驱动程序为了确保任何时候安装都可以正确指定相应的驱动程序在控制面板中启动图4.4添加新硬件向导单击进入下图所示对话框图4.5 添加新硬件向导 选择希望从列表中选择硬件单击后出现如下对话框图4.6 添加新硬件向导 如图4 .6所示其他设备然后单击 图4.7 添加新硬件向导 分别在栏型号不作任何选择从磁盘安装通过浏览寻找相应的INF文件图4.8 添加新硬件向导 选中所要的文件后确定进入下图图4.9 添加新硬件向导 这个时候要选中相应的型号下一步当出现下图时图4.10 添加新硬件向导 暂时不管列表中的选项下一步然后单击图4.11 添加新硬件向导 这时将出现界面ISA5420 ISACAN Communication Card 图4.12 Win98的设备管理器 出现下图所示对话框图4.13 Win98的设备管理器 最后在操作前必须先去掉复选框的选中符号如果所列的软件配置已经正确确定修改内存范围可以直接选择的下拉单中断请求 03如下图所示图4.14 Win98的设备管理器 这时可以选择或输入相应的中断号使软件和硬件的配置一致 4.3.2.2 在DOS下安装 运行目录下的setup.exe×îºóÉèÖóÌÐò½«ÔÚC盘根目录下建立一个配置文件程序将无法正确运行如输入表示0x120下图为设置界面图4.15 DOS安装程序 五\MANUAL CAN-bus 通用测试软件及接口函数库使用手册.pdfDOS版的接口函数说明如下我们只需要把目录下的ISA5420.lib和ISA5420.h加入到自己的工程中这样就可以使用接口函数了#define false 0 #define true 1 #define NULL ((void*)0) 1.ZLGCAN系列接口卡信息的数据类型typedef struct _VCI_BOARD_INFO{ USHORT hw_Version USHORT dr_Version USHORT irq_Num CHAR str_Serial_Num[20] USHORT Reserved[4]*PVCI_BOARD_INFOhw_Version 用16进制表示的硬件版本号 fw_Version 用16进制表示的固件版本号in_Version 用16进制表示的接口库版本号can_Num 表示有几路CAN通道str_hw_Type 硬件类型USBCAN V1.00注意\02.定义CAN信息帧的数据类型typedef struct _VCI_CAN_OBJ{ ULONG32 ID BYTE TimeFlag BYTE RemoteFlag BYTE DataLen BYTE Reserved[3]*PVCI_CAN_OBJ TimeFlag 是否使用时间标识TimeFlag和TimeStamp只在此帧为接收帧时有意义从CAN控制器初始化开始计时 SendType 发送帧类型=1时为单次发送=3时为单次自 发自收RemoteFlag 是否是远程帧ID 报文ID即Data的长度 Reserved 系统保留定义 UCHAR regMode UCHAR regALCapture UCHAR regEWLimit UCHAR regTECounter. }VCI_CAN_STATUS,*PVCI_CAN_STATUSErrInterrupt 错误中断记录 regMode CAN控制器模式寄存器regALCapture CAN控制器仲裁丢失寄存器regEWLimit CAN控制器错误警告限制寄存器regTECounter CAN控制器发送错误寄存器4.定义错误信息的数据类型typedef struct _ERR_INFO{ ULONG32 ErrCodeBYTE ArLost_ErrData*PVCI_ERR_INFOErrCode 错误码 ArLost_ErrData 当产生的错误中有仲裁丢失错误时表示为仲裁丢失错误的错误标识数据定义 ULONG32 AccMask UCHAR Filter UCHAR Timing1}VCI_INIT_CONFIG,*PVCI_INIT_CONFIGAccCode 验收码Reserved 保留Timing0 定时器0Mode 模式DevType¿ÉÒÔΪVCI_ISA5420设备索引号 Reserved函数功能返回值0表示操作失败DevType¿ÉÒÔΪVCI_ISA5420DevIndexÖ»ÄÜΪ0此函数用以关闭设备为1表示操作成功3. ULONG VCI_InitCan(ULONG DevType, ULONG DevIndex, ULONG CANIndex, PVCI_INIT_CONFIG pInitConfig);入口参数设备类型 DevIndex只能为0第几路CAN初始化参数结构此函数用以初始化指定的CAN为1表示操作成功参数表例如 AccMask的值设为0x00000000 若把AccCode的值设为0x100则只有CAN信息帧ID为0x100pInitConfig->Reserved保留pInitConfig->Filter滤波方式1表示双滤波pInitConfig->Timing0定时器0pInitConfig->Timing1定时器1pInitConfig->Mode模式1表示只听模式4. ULONG VCI_ReadBoardInfo(ULONG DevType, ULONG DevIndex, PVCI_BOARD_INFO pInfo);入口参数设备类型 DevIndex只能为0用来存储设备信息的VCI_BOARD_INFO结构指针此函数用以获取设备信息为1表示操作成功5. ULONG VCI_ReadErrInfo(ULONG DevType, ULONG DevIndex, ULONG CANIndex, PVCI_ERR_INFO pErrInfo);入口参数设备类型 DevIndex只能为0第几路CAN注此参数应该设为比如当调用VCI_OpenDeviceµ÷Óô˺¯ÊýÀ´»ñȡʧ°Ü´íÎóÂëµÄʱºòÓ¦¸Ã°ÑCANIndex设为函数功能返回值0表示操作失败pErrInfo->ErrCode pErrInfo->Passive_ErrData pErrInfo->ArLost_ErrData 错误描述0x0100 无无设备已经打开0x0200 无无打开设备错误0x0400 无无设备没有打开0x0800 无无缓冲区溢出0x1000 无无此设备不存在0x2000 无无装载动态库失败0x4000 无无表示为执行命令失败错误0x8000 无内存不足0x0001 无无CAN控制器内部FIFO溢出0x0002 无无CAN控制器错误报警0x0004 有具体值见表后CAN控制器仲裁丢失0x0010 无无CAN控制器总线错误当(PErrInfo->ErrCode&0x0004)==0x0004时错误代码类型错误属性错误段表示错误代码类型功能说明位ECC.7 位ECC.6 功能0 0 位错0 1 格式错1 0 填充错1 1 其它错误错误属性bit5 =0;表示发送时发生的错误=1;表示接收时发生的错误错误段表示功能说明bit4 bit 3 bit 2 bit 1 bit 0 功能0 0 0 1 1 帧开始0 0 0 1 0 ID.28-ID.210 0 1 1 0 ID.20-ID.180 0 1 0 0 SRTR位0 0 1 0 1 IDE位0 0 1 1 1 ID.17-ID.130 1 1 1 1 ID.12-ID.50 1 1 1 0 ID.4-ID.00 1 1 0 0 RTR位0 1 1 0 1 保留位10 1 0 0 1 保留位00 1 0 1 1 数据长度代码0 1 0 1 0 数据区0 1 0 0 0 CRC序列1 1 0 0 0 CRC定义符1 1 0 0 1 应答通道1 1 0 1 1 应答定义符1 1 0 1 0 帧结束1 0 0 1 0 中止1 0 0 0 1 活动错误标志1 0 1 1 0 消极错误标志1 0 0 1 1 支配当(PErrInfo->ErrCode&0x0008)==0x0008时入口参数 设备类型 DevIndex只能为0第几路CAN用来存储CAN 状态的VCI_CAN_STA TUS 结构指针此函数用以获取CAN 状态为1表示操作成功7. ULONG VCI_GetReference(ULONG DevType, ULONG DevIndex, ULONG CANIndex, ULONG RefType,PVOID pData); 入口参数 设备类型 DevIndex只能为0第几路CAN参数类型 用来存储参数有关数据缓冲区地址首指针此函数用以获取设备的相应参数为1表示操作成功参数表RefType Pdata功能描述1总长度第二个字节接收读到的寄存器值读取CAN 芯片某个寄存器的值 例如要读取地址为9的寄存器值pData[1]将存放读出的值DevType¿ÉÒÔΪVCI_ISA5420 设备索引号 CANIndexRefTypepData函数功能主要处理不同设备的特定操作为1表示操作成功参数表RefType Pdata功能描述1总长度第二个字节表示需要写入的新值 往CAN 芯片某个寄存器写入指定值9. ULONG VCI_GetReceiveNum(ULONG DevType, ULONG DevIndex, ULONG CANIndex); 入口参数 设备类型 DevIndex只能为0第几路CAN此函数用以获取指定接收缓冲区中接收到但尚未被读取的帧数返回尚未被读取的帧数DevType¿ÉÒÔΪVCI_ISA5420 设备索引号 CANIndex返回值0表示操作失败DevType¿ÉÒÔΪVCI_ISA5420设备索引号 CANIndex函数功能返回值0表示操作失败DevType¿ÉÒÔΪVCI_ISA5420设备索引号 CANIndex函数功能返回值0表示操作失败DevType¿ÉÒÔΪVCI_ISA5420设备索引号 CANIndex pSendLen返回值14. ULONG VCI_Receive(ULONG DevType, ULONG DevIndex, ULONG CANIndex, PVCI_CAN_OBJ pReceive, ULONG Len, INT WaitTime=DevType¿ÉÒÔΪVCI_ISA5420设备索引号 CANIndex pReceiveLenWaitTimeÒÔºÁÃëΪµ¥Î»此函数从指定的设备读取数据返回实际读取到的帧数则表示读取数据失败请调用VCI_ReadErrInfo函数来获取错误码六请参考目录下的这个测试程序可执行文件在目录下GISAMAIN.EXE下接口函数的静态库和头文件源码中包含了使用接口函数的详细例程七最好能先看看相应操作系统的下中是否列出了ISA-5420的驱动选项若出现问号说明驱动没有被正确安装比如接触不良l 必须保证板卡上的硬件跳线和软件设置相一致产品服务8.1 保修期所有ZLGCAN接口卡的保修期均为12个月在正确使用和正常工作情况下将可得到免费的维修服务12´íÎóʹÓûò²úÆ·Ð޸Ķøµ¼ÖµĹÊÕÏ8.4 软件升级ISA-5420智能CAN接口卡的驱动软件终生免费升级Cantools@技术支持专业主页http附录APHILIPS正式授权含CAN-bus汽车传感器PHILIPS半导体的领先技术ODVA协会的支持至现在接口设备能够为客户提供从工具方案涉及CAN-bus多个行业与应用领域并已在多个领域中通过严格的实际运行考验CAN-bus 专用芯片l P87C591 集成PeliCAN控制器的增强型8位单片机l LPC2219 集成2路CAN控制器的ARM芯片l LPC2229 集成6路CAN控制器的ARM芯片l SJA1000 独立CAN控制器l PCA82C250/251 通用CAN收发器l TJA1050/1040/1041 高速CAN收发器l TJA1054 容错的CAN收发器l TJA1020 标准LIN收发器l 各类DC/DC电源模块l 软件源码P87C591 PeliCAN模块DeviceNET & CANopenCAN-bus 仿真器/实验仪l TKS-591S HOOKS仿真器l TKS-591B HOOKS仿真器l DP-51+ 单片机仿真实验仪l DP-51H 单片机数据通讯仿真实验仪l DP-668 单片机与TCP/IP仿真实验仪CAN-bus 开发套件l CANstarter-I CAN-bus开发套件CAN-bus 接口卡l ZLGCANTEST 通用CAN-bus测试软件l PCI-5110 单路智能CAN接口卡l PCI-5121 双路智能CAN接口卡l PCI-9810 单路非智能CAN接口卡l PCI-9820 双路非智能CAN接口卡l USBCAN-I 单路智能CAN接口卡l USBCAN-II 双路智能CAN接口卡l ISA-9620 双路非智能CAN接口卡l ISA-5420 双路智能CAN接口卡l CAN232 智能CAN接口卡l CANlite 便携式CAN接口卡l CANmini 微型CAN接口卡CAN-bus 转换器l CANrep-A 智能全隔离CAN中继器l CANrep-B 隔离CAN中继器l CAN485 智能CAN转换卡l CAN232B 智能CAN转换卡CAN-bus 分析仪l CANalyst-I 单路CAN分析仪l CANalyst-II 双路CAN分析仪CAN-bus 技术方案l CAN-bus 通讯/测试/控制实验室l 汽车电子通讯控制l RS485 网络升级l 智能楼宇系统l 电力通讯控制l 工业自动化控制l 矿业远程通讯l DeviceNET 应用我们立志成为国内第一流的CAN-bus开发应用的团队请浏览技术支持专业主页httpcan@和cantools@用户可以直接从周立功公司专业网站下载大部分CAN-bus的数据手册或购买相关的开发工具而获得附录B°üÀ¨Á½²¿·ÖÇ°3个字节为信息部分数据长度报文识别码第7位表示帧格式FF第6位表示帧的类型RTR=1表示为远程帧l 字节211位有效11为数据帧的实际数据B.2 CAN2.0B扩展帧ID.28-ID.21 l 字节1为帧信息FF FF 第6位表示帧的类型RTR=1表示为远程帧l 字节2Æä¸ß29位有效13为数据帧的实际数据广州周立功单片机发展有限公司 www.zlgmcu.com 附录CBTR1ϱíÁгöÁËÒ»×éÍƼöµÄBTR0±ê×¢*符号的值是由CiA协会推荐的标准值用户也可以根据SJA1000器件配套的参考资料自行计算合适的寄存器BTR0P87C591的CAN通讯波特率采用同SJA1000一致的计算方法lll。
周立功 GUI应用基础
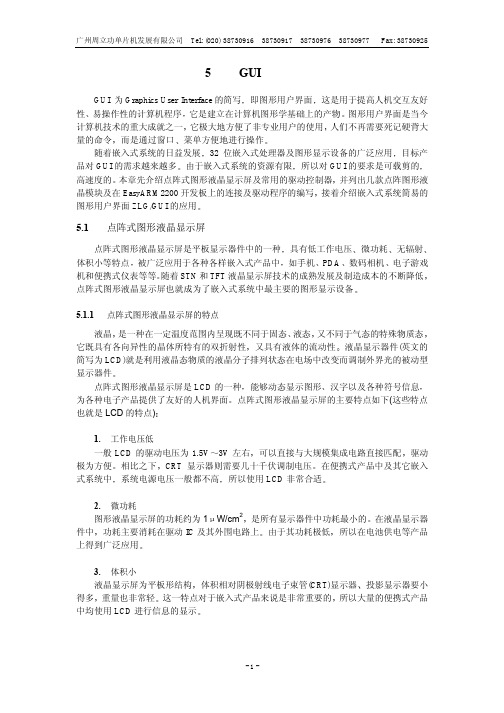
第5章 GUI应用基础GUI 为Graphics User Interface的简写易操作性的计算机程序它极大地方便了非专业用户的使用菜单方便地进行操作32位嵌入式处理器及图形显示设备的广泛应用由于嵌入式系统的资源有限高速度的并列出几款点阵图形液晶模块及在EasyARM2200开发板上的连接及驱动程序的编写5.1 点阵式图形液晶显示屏点阵式图形液晶显示屏是平板显示器件中的一种无辐射如手机电子游戏机和便携式仪表等等点阵式图形液晶显示屏也就成为了嵌入式系统中最主要的图形显示设备是一种在一定温度范围内呈现既不同于固态它既具有各向异性的晶体所特有的双折射性点阵式图形液晶显示屏是LCD的一种为各种电子产品提供了友好的人机界面1. 工作电压低一般LCD的驱动电压为1.5V¿ÉÒÔÖ±½ÓÓë´ó¹æÄ£¼¯³Éµç·ֱ½ÓÆ¥ÅäCRT显示器则需要几十千伏调制电压系统电源电压一般都不高W/cm2¹¦ºÄÖ÷ÒªÏûºÄÔÚÇý¶¯IC及其外围电路上3. 体积小液晶显示屏为平板形结构投影显示器要小得多所以大量的便携式产品中均使用LCD进行信息的显示4. 可视面积大根据实际需求而且对于相同尺寸的显示器因为它根本就不存在辐射液晶显示器也有自己独特的优势而普通显示器为了散发热量的需要泄漏不需要转换成模拟信号7. 寿命长液晶显示器件本身几乎没有什么劣化问题5.1.2 点阵式图形液晶显示屏的种类1ÎÒÃÇ¿ÉÄܽӴ¥¹ý¸÷ÖÖ¸÷ÑùµÄµãÕóʽͼÐÎÒº¾§ÆÁl TN(Twist Nematic)扭曲向列型将涂有ITO透明导电层的两片玻璃基板间夹上一层正介电各向异性液晶然后上下各加一偏光片由于TN型液晶显示器件的电光响应慢多路驱动上有一定限制最多只能做到64路点阵的驱动只不过液晶分子扭曲180°ÆäÌصãÊǵç¹âÏìÓ¦ÇúÏ߸üºÃSTN液晶只可以实现伪彩色(一般人眼可以分辨18bit色否则称之为伪彩色)显示但由于构成它们的矩阵方式是无源矩阵从而不能显示真正的活动图像一般是对液晶盒施加电压出现所以行列数越多也因为如此目前l TFT(Thin Film Transistor)薄膜晶体管型TFT为薄膜晶体管有源矩阵液晶显示器件从而可以大大提高液晶显示器的对比度由于每个节点都相对独立同时可以精确控制显示色阶现在的TFT型液晶一般都实现了18bit以上的彩色(256K色)SVGA(800×600)TFT液晶显示器也存在着耗电较大和成本较高的不足另外电控双折射型(ECB)和铁电型(FE)等等所以这里就不一一介绍了我们常见点阵式图形液晶屏有以下几种显示的点为黑色白色字/暗蓝底色单色点阵式图形液晶均采用TN/STN技术l 4级灰度屏将黑白色分为4级实质上是由控制器支持实质上是由控制器支持实质上是由控制器支持实质上是由控制器支持一般采用STN技术一般采用STN技术一般都实现了18bit以上的彩色(256K色)3. 触摸屏对于点阵式图形液晶显示屏用于检测屏幕触摸输入信号以下是几种常见的触摸屏的类型其中一层在屏幕的左右边缘各有一条垂直总线四线式触摸屏是最常用的触摸屏之一图5. 1 四线式触摸屏结构示意图触摸屏的两个金属导电层分别用来测量X轴和Y轴方向的坐标记为X+和X-¼ÇΪY+和Y-当在一对电极上施加电压时而Y方向电极对上不加电压时通过测量Y+电极对地的电压大小当在Y电极对上加电压通过测量X+(或X-)电极的电压图5. 2 四线式触摸屏测量原理在使用触摸屏时通常直接使用触摸屏控制器完成这一功能触摸屏控制器的主要功能是在微处理器的控制下向触摸屏的两个方向分时施加电压在微处理器SPI口提供的同步时钟作用下将数字信号输出到微处理器ADS7843/7846Ö÷ÒªÇø±ðÔÚÓÚÎåÏßʽ´¥ÃþÆÁ将其中一导电层的四端均引出来作为四个电极测量时要交替在X方向电极和Y方向电极上施加电压l 表面声波触摸屏表面声波触摸屏的触摸部分是一块强化玻璃板右上角则固定了两个相应的超声波接收换能器工作原理以右上角的X轴发射换能器为例声波能量经过屏体表面接收换能器将返回的表面声波能量变为电信号X轴途经手指部位向上走的声波能量被部分吸收Y坐标外表面声波触摸屏的主要特点是清晰美观触摸准确l 电容式触摸屏电容式触摸屏是在玻璃屏幕上镀一层透明的薄膜体层此外用户触摸屏幕时耦合电容而电流的强弱与手指及电极间的距离成正比电容式触摸屏的特点为触摸准确度较高但怕静电干扰利用触摸体阻隔红外线的工作方式进行坐标点测定工作的技术红外线式触摸屏安装简单光点距架框的四边排列了红外线发射管及接收管便会挡住经过该位置的横竖两条红外线如阳光或室内射灯等均会影响红外线触摸屏的准确度不适宜放置于户外MicroTouch日本的Minato和CarrolltouchÖ÷ÒªÃæÏòµç×èÎåÏßʽµç×è´¥ÃþÆÁ½ÏΪÁ÷ÐеÄÊÇÃÀ¹úEloTouch和Microtouch品牌5.2 常用点阵式图形液晶控制器在嵌入式系统应用中如果微控制器本身没有液晶驱动控制功能目前较为流行的点阵式图形液晶控制器有EPSON公司的SED系列产品这里将一些常用的控制器及其参数列举如下适用于中等规模单色点阵图形液晶(通过外部增加的色彩生成电路和M信号生成电路支持64K字节显示存储器器件引脚图如图5. 4所示指令丰富相关参数如下5.5V 最大驱动液晶点阵64K字节SRAMMPU接口水平和垂直方向卷动显示方式1/2工作电流典型值3.5mA图5. 3 SED1335F逻辑框图图5. 4 SED1335F引脚图l SED1351FSED1351F是高占空比的点阵式图形液晶控制器支持虚拟屏具有循环侵占方式的数据和地址的电路SED1351F是一款低功耗CMOS控制器SED1351F0A器件引脚图如图5. 6所示相关参数如下单色102464K字节SRAMMPU接口黑白色显示或4级灰度显示屏幕卷动最高1/1024图5. 5 SED1351F逻辑框图图5. 6 SED1351F0A引脚图图5. 7 SED1351FLB引脚图l SED1520系列SED1520系列液晶驱动器是显示字符和图形的单片点阵式液晶驱动控制芯片具有较宽的工作电压范围SED1520引脚图如图5. 9所示低功耗CMOS工艺高速8位MPU接口内部显示数据RAM为2560位以驱动更多点阵路数驱动LCD占空比最高1/32图5. 8 SED1520原理框图图5. 9 SED1520引脚图l SED1565系列SED1565系列液晶驱动器是显示字符和图形的单片点阵式液晶驱动控制芯片132位显示数据RAMMPU通过8位并行方式或串行方式SED1565原理逻辑框图如图5. 10所示SED1565系列液晶控制器具有以下基本功能内部显示数据RAM为65支持主从操作LCD电压V5=驱动LCD占空比最高1/65图5. 10 SED1565原理框图l SED1353FSED1353F是一款最大能支持10244/16级灰度单色液晶显示器器件逻辑框图如图5. 11所示SED1353F1A器件引脚图如图5. 13所示宽工作电压黑白色1024512256伪彩色51216位16MHZ的MC68xx MPU接口带有READY(或WAIT#)信号的8/16位MPU接口显示方式最高1/1024低功耗图5. 11 SED1353F原理框图图5. 12 SED1353F0A引脚图图5. 13 SED1353F1A引脚图l SED1354FSED1354F是一款能支持TFT点阵液晶和CRT显示器的控制器支持9/12位支持16/256级灰度单色液晶显示支持虚拟屏SED1354F器件引脚图如图5. 15所示低成本宽工作电压16级灰度/伪彩色8006009/12位TFT液晶(64K色) 8002M字节EDO-DRAM或FPM-DRAM16位总线接口内置调色板图5. 14 SED1354原理框图图5. 15 SED1354引脚图5.2.2 HD系列点阵式图形液晶控制器l HD61202/3HD61202/3是日本日立公司的适用于小规模单色点阵液晶的液晶列/行驱动控制器使用两片或三片HD61202可组成128点列或192点列的列驱动器组显示屏上各像素点的显示状态与显示存储器的各位数据一一对应配备有显示存储器管理电路芯片引脚图如图5. 17所示宽工作电压黑白色64列/行支持存储器大小8位并行数据接口最高1/64(HD61202) 1/128(HD61203)低功耗市场上采用兼容产品KS0107/8代替图5. 16 HD61202原理框图图5. 17 HD61202引脚图l HD61830HD61830适用于小规模的单色点阵图形液晶控制器具有片内字符发生器CGROMÆ÷¼þÒý½ÅͼÈçͼ5. 19所示以驱动更多点阵路数工作电压64K字节SRAMMPU接口图形方式/文本方式字符发生器7字符(CGROM)32种5图5. 18 HD61830原理框图图5. 19 HD61830引脚图5.2.3 东芝公司点阵式图形液晶控制器T6963CT6963C常用于中规模的单色点阵图形液晶的显示控制器显示驱动所需的参数如占空比系数字符的字体选择等均由引脚电平设置器件引脚图如图5. 21所示工作电压128(单屏)支持存储器大小图形方式128种578×Ö·û)驱动LCD占空比显示期间电流典型值3.3mA图5. 20 T6963C原理模框图图5. 21 T6963C引脚图另外比如ST7920Éú²ú³§¼Òͨ³£»á½«Òº¾§ÏÔʾÆÁºÍÇý¶¯µç·װÅäÔÚÒ»Æð简称LCMËüÊǽ«Òº¾§ÏÔʾÆ÷¼þPCB线路板液晶显示模块在很大程度上方便了用户的使用这里列举几种常用的点阵式图形液晶模块及驱动程序128点视角为6:00模块的电路原理框图如图5. 22所示 图5. 22 SMG240128A点阵图形液晶模块原理框图 EasyARM2200开发板可以直接支持SMG240128A点阵图形液晶模块或相兼容的液晶模块采用8位总线方式连接显示地址和显示数据均通过DB0ÓÉÓÚÄ£¿é¹¤×÷µçÔ´ÊÇ5V所以在总线上串接470½«C/D与A1连接有一个好处模块的片选信号由LPC2210的A22和外部存储器BANK3片选CS3相当A22和nCS3同时为0时命令操作地址为0x83000002图5. 23 SMG240128A点阵图形液晶模块应用连接电路使用LPC2210的总线对SMG240128A点阵图形液晶模块操作控制前如程序清单5. 1所示如程序清单5. 2所示程序清单5. 1存储器接口BANK3总线配置LCDDRIVE.C* 功能32K显示存* 显示是横向字节图形液晶采用T6963C液晶控制芯片并行接口(使用LPC2210驱动)D0--D7 <===> D0--D7* /WR <===> nWE* /RD <===> nOE* /CE <===> nCS3_1* C/D <===> A1** /RST <===> VCC****************************************************************************************/ #include "config.h"TCOLOR gui_disp_buf[][GUI_LCM_XMAX/8]; // 声明GUI显示缓冲区/* 定义LCM地址 */#define TG240128_COM (*((volatile unsigned short *) 0x83000002))#define TG240128_DAT (*((volatile unsigned short *) 0x83000000))/************************************************************************ 名称写命令子程序不检查液晶模块的状态)* 入口参数无* 说明LCD_WriteData()* 功能不检查液晶模块的状态)* 入口参数无* 说明LCD_ReadState()* 功能无* 出口参数函数会设置LCM数据总线为输入方式***********************************************************************/#define LCD_ReadState() TG240128_COM/************************************************************************ 名称读取数据子程序无* 出口参数函数会设置LCM数据总线为输入方式***********************************************************************/#define LCD_ReadData() TG240128_DAT/* 以下为LCM的驱动层提供设置显示地址等功能带参数命令模式操作模式N/6或N/8N/6或N/8Âß¼-»ò */#define LCD_MOD_XOR 0x81 /* 显示方式逻辑与 */#define LCD_MOD_TCH 0x83 /* 显示方式#define LCD_DIS_SW 0x90 /* 显示开关光标显示启用/禁用 *//* D2=1/0图形显示启用/禁用(打开后再使用) */#define LCD_CUR_SHP 0xA0 /* 光标形状选择地址加1 */#define LCD_INC_RD 0xC1 /* 数据一次读地址减1 */#define LCD_DEC_RD 0xC3 /* 数据一次读地址不变 */#define LCD_NOC_RD 0xC5 /* 数据一次读D0-D2--定义D0-D7位0为清除 *//************************************************************************ 名称判断读写指令和读写数据是否允许无* 出口参数LCD_TestStaBit3()无* 出口参数LCD_WriteTCommand1() * 功能* 入口参数操作出错返回0LCD_WriteTCommand3() * 功能* 入口参数操作出错返回0ÏÈ·¢ËÍÁ½×Ö½Ú²ÎÊý¾ÝÊý¾Ýif( LCD_TestStaBit01()==0 ) return(0);LCD_WriteCommand(command); // 发送命令字return(1);}/*********************************************************************** * 名称写单参数命令子程序* 入口参数操作出错返回0ÏÈ·¢ËͲÎÊý¾ÝÊý¾ÝLCD_WriteTData1()* 功能* 入口参数操作出错返回0Ö÷Òª¸ºÔð½âÊÍÓû§ÃüÁîLCM初始化显示起始地址为0x0000ÎÞ* 出口参数函数会设置LCM数据总线为输出方式***********************************************************************/void LCD_Initialize(void){ LCD_WriteTCommand3(LCD_TXT_STP, 0x00, 0x00); // 设置文本方式RAM起始地址LCD_WriteTCommand3(LCD_TXT_WID, 30, 0x00); // 设置文本模式的宽度 // N为宽度点数宽度为N/6或N/8Èç240LCD_WriteTCommand1(LCD_MOD_OR); // 设置显示方式为"或"LCD_WriteTCommand1(LCD_DIS_SW|0x08); // 设置纯图形显示模式}/************************************************************************ 名称LCD填充起始地址为0x0000dat 要填充的数据* 出口参数LCD_UpdatePoint()* 功能* 入口参数返回值为1时表示操作成功* 说明****************************************************************************/void LCD_UpdatePoint(uint32 x, uint32 y){ uint32 addr;/* 找出目标地址 */addr = y*(GUI_LCM_XMAX>>3) + (x>>3);LCD_WriteTCommand3(LCD_ADR_POS, addr&0xFF, addr>>8); // 置地址指针/* 输出数据 */LCD_WriteTCommand2(LCD_INC_WR, gui_disp_buf[y][x>>3]);}/***************************************************************************** 名称LCM全屏刷新 * 入口参数无****************************************************************************/void LCD_UpdateSCR(void){ uint32 i, j;/* 开始复制数据 */LCD_WriteTCommand3(LCD_ADR_POS, 0x00, 0x00); // 置地址指针LCD_WriteTCommand1(LCD_AUT_WR); // 自动写for(i=0; i<GUI_LCM_YMAX; i++) // 历遍所有行{ for(j=0; j<GUI_LCM_XMAX/8; j++) // 历遍所有行{ LCD_WriteTData1(gui_disp_buf[i][j]);}}LCD_WriteTCommand1(LCD_AUT_OVR); // 自动写结束}5.3.2 MG12864点阵式图形液晶模块MG12864点阵图形液晶模块的点像素为128ÊÓ½ÇΪ6:00模块的电路原理框图如图5. 24所示应用连接电路如图5. 25所示MG12864点阵图形液晶模块的没有地址总线由于模块工作电源是5V所以在总线上串接470ÓÃÓÚ¿ØÖÆÄ£¿é´¦ÀíÊý¾Ý/命令就是LPC2210可以使用16位总线方式操作该图形液晶模块(高8位数据被忽略)A22到的所以需要LCM_CS1ÓÉÓÚKS0108的片选是高电平有效所以需要使用74HC04将信号反相A21和nCS2同时为0时所以其数据操作地址为0x82000000当A23A21为1时所以其数据操作地址为0x82200000图5. 24 MG12864点阵图形液晶模块原理框图图5. 25 MG12864点阵图形液晶模块应用连接电路使用LPC2210的总线对MG12864点阵图形液晶模块操作控制前如程序清单5. 3所示所以把总线配置为最慢的时序驱动程序对应的头文件如程序清单5. 5所示程序清单5. 3存储器接口BANK2总线配置LCM_DRIVE.C* 功能在LCM_DRIVE.H文件中定义了LCM操作地址写数据操作地址为0x82000002* 由于GRAPHICS.C中使用了disp_buf作为作图缓冲区LCM_DispFill()均要更新disp_bufLCM_Wr1Command()* 功能 * 入口参数LCM_Wr2Command()* 功能 * 入口参数LCM_Wr1Data()* 功能 * 入口参数LCM_Wr2Data()* 功能 * 入口参数LCM_DispIni()* 功能设置显示起始行为0并清屏无* 出口参数即列LCM_Wr2Command(LCM_ADDRSTRY+0);LCM_Wr2Command(LCM_ADDRSTRX+0);}/*********************************************************************** * 名称向指定点写数据(一字节)* 入口参数无* 说明CS2--控制后64个点) { LCM_Wr1Command(LCM_ADDRSTRX+x); // 设置当前列地址即y坐标for(x=0; x<10; x++); // 短延时LCM_Wr1Data(wrdata);}else{ x = x-64; // 调整x变量值LCM_Wr2Command(LCM_ADDRSTRX+x);LCM_Wr2Command(LCM_ADDRSTRY+y);for(x=0; x<10; x++);LCM_Wr2Data(wrdata);}}/************************************************************************ 名称向显示屏填充数据* 入口参数无* 说明for(y=0; y<8; y++){ LCM_Wr1Command(LCM_ADDRSTRY+y); // 设置页(行)地址 LCM_Wr1Command(LCM_ADDRSTRX); // 设置列地址LCM_Wr2Command(LCM_ADDRSTRY+y);LCM_Wr2Command(LCM_ADDRSTRX);for(i=0; i<10; i++);for(x=0; x<64; x++){ LCM_Wr1Data(filldata);LCM_Wr2Data(filldata);disp_buf[y][x] = filldata;disp_buf[y][x+64] = filldata;}}}/* ASCII码对应的点阵数据表 */uint8 const ASCII_TAB20[80] = {0x00, 0x00, 0x00, 0x00, 0x00,0x00, 0x00, 0x9e, 0x00, 0x00,0x00, 0x0e, 0x00, 0x0e, 0x00,0x28, 0xfe, 0x28, 0xfe, 0x28,0x48, 0x54, 0xfe, 0x54, 0x24,0x46, 0x26, 0x10, 0xc8, 0xc4,0x6c, 0x92, 0xaa, 0x44, 0xa0,0x00, 0x0a, 0x06, 0x00, 0x00,0x00, 0x38, 0x44, 0x82, 0x00,0x00, 0x82, 0x44, 0x38, 0x00,0x28, 0x10, 0x7c, 0x10, 0x28,0x10, 0x10, 0x7c, 0x10, 0x10,0x00, 0xa0, 0x60, 0x00, 0x00,0x10, 0x10, 0x10, 0x10, 0x10,0x00, 0xc0, 0xc0, 0x00, 0x00,0x40, 0x20, 0x10, 0x08, 0x04};uint8 const ASCII_TAB30[80] = {0x7C, 0xA2, 0x92, 0x8A, 0x7C,0x00, 0x84, 0xFE, 0x80, 0x00,0x84, 0xC2, 0xA2, 0x92, 0x8C,0x42, 0x82, 0x8A, 0x96, 0x62,0x30, 0x28, 0x24, 0xFE, 0x20,0x4E, 0x8A, 0x8A, 0x8A, 0x72,0x78, 0x94, 0x92, 0x92, 0x60,0x02, 0xE2, 0x12, 0x0A, 0x06,0x6C, 0x92, 0x92, 0x92, 0x6C,0x0C, 0x92, 0x92, 0x52, 0x3C,0x00, 0x6C, 0x6C, 0x00, 0x00,0x00, 0xAC, 0x6C, 0x00, 0x00,0x10, 0x28, 0x44, 0x82, 0x00,0x28, 0x28, 0x28, 0x28, 0x28,0x00, 0x82, 0x44, 0x28, 0x10,0x04, 0x02, 0xA2, 0x12, 0x0C};uint8 const ASCII_TAB40[80] = {0x64, 0x92, 0xF2, 0x82, 0x7C,0xFC, 0x22, 0x22, 0x22, 0xFC,0xFE, 0x92, 0x92, 0x92, 0x6C,0x7C, 0x82, 0x82, 0x82, 0x44,0xFE, 0x82, 0x82, 0x44, 0x38,0xFE, 0x92, 0x92, 0x92, 0x82,0xFE, 0x12, 0x12, 0x12, 0x02,0x7C, 0x82, 0x92, 0x92, 0xF4,0xFE, 0x10, 0x10, 0x10, 0xFE,0x00, 0x82, 0xFE, 0x82, 0x00,0x40, 0x80, 0x82, 0x7E, 0x02,0xFE, 0x10, 0x28, 0x44, 0x82,0xFE, 0x80, 0x80, 0x80, 0x80,0xFE, 0x04, 0x18, 0x04, 0xFE,0xFE, 0x08, 0x10, 0x20, 0xFE,0x7C, 0x82, 0x82, 0x82, 0x7C};uint8 const ASCII_TAB50[80] = {0xFE, 0x12, 0x12, 0x12, 0x0C,0x7C, 0x82, 0xA2, 0x42, 0xBC,0xFE, 0x12, 0x32, 0x52, 0x8C,0x8C, 0x92, 0x92, 0x92, 0x62,0x02, 0x02, 0xFE, 0x02, 0x02,0x7E, 0x80, 0x80, 0x80, 0x7E,0x3E, 0x40, 0x80, 0x40, 0x3E,0x7E, 0x80, 0x70, 0x80, 0x7E,0xC6, 0x28, 0x10, 0x28, 0xC6,0x0E, 0x10, 0xE0, 0x10, 0x0E,0xC2, 0xA2, 0x92, 0x8A, 0x86,0x00, 0xFE, 0x82, 0x82, 0x00,0x04, 0x08, 0x10, 0x20, 0x40,0x00, 0x82, 0x82, 0xFE, 0x00,0x08, 0x04, 0x02, 0x04, 0x08,0x80, 0x80, 0x80, 0x80, 0x80};uint8 const ASCII_TAB60[80] = {0x00, 0x02, 0x04, 0x08, 0x00,0x40, 0xA8, 0xA8, 0xA8, 0xF0,0xFE, 0x90, 0x88, 0x88, 0x70,0x70, 0x88, 0x88, 0x88, 0x40,0x70, 0x88, 0x88, 0x90, 0xFE,0x70, 0xA8, 0xA8, 0xA8, 0x30,0x10, 0xFC, 0x12, 0x02, 0x04,0x18, 0xA4, 0xA4, 0xA4, 0x7C,0xFE, 0x10, 0x08, 0x08, 0xF0,0x00, 0x88, 0xFA, 0x80, 0x00,0x40, 0x80, 0x88, 0x7A, 0x00,0xFE, 0x20, 0x50, 0x88, 0x00,0x00, 0x82, 0xFE, 0x80, 0x00,0xF8, 0x08, 0x30, 0x08, 0xF8,0xF8, 0x10, 0x08, 0x08, 0xF0,0x70, 0x88, 0x88, 0x88, 0x70};uint8 const ASCII_TAB70[80] = {0xF8, 0x28, 0x28, 0x28, 0x10,0x10, 0x28, 0x28, 0x30, 0xF8,0xF8, 0x10, 0x08, 0x08, 0x10,0x90, 0xA8, 0xA8, 0xA8, 0x40,0x08, 0x7E, 0x88, 0x80, 0x40,0x78, 0x80, 0x80, 0x40, 0xF8,0x38, 0x40, 0x80, 0x40, 0x38,0x78, 0x80, 0x60, 0x80, 0x78,0x88, 0x50, 0x20, 0x50, 0x88,0x18, 0xA0, 0xA0, 0xA0, 0x78,0x88, 0xC8, 0xA8, 0x98, 0x88,0x00, 0x10, 0x6C, 0x82, 0x00,0x00, 0x00, 0xFE, 0x00, 0x00,0x00, 0x82, 0x6C, 0x10, 0x00,0x10, 0x10, 0x54, 0x38, 0x10,0x10, 0x38, 0x54, 0x10, 0x10};/************************************************************************ 名称指定地址显示字符disp_cy 显示行值(0-7)* disp_cx 显示列值(0-15)* dispdata 所要显示的字符(ASCII码)* 注a-z及空格模为8*8ÿÐÐ16个字符)²¢ÉèÖÃÏàÓ¦µÄµãÕóÊý¾Ý±í*/ switch(dispdata&0xf0){ case 0x20:dispdata = (dispdata&0x0f)*5;pchardata = &ASCII_TAB20[dispdata];break;case 0x30:dispdata = (dispdata&0x0f)*5;pchardata = &ASCII_TAB30[dispdata];break;case 0x40:dispdata = (dispdata&0x0f)*5;pchardata = &ASCII_TAB40[dispdata];break;case 0x50:dispdata = (dispdata&0x0f)*5;pchardata = &ASCII_TAB50[dispdata];break;case 0x60:dispdata = (dispdata&0x0f)*5;pchardata = &ASCII_TAB60[dispdata];break;case 0x70:dispdata = (dispdata&0x0f)*5;pchardata = &ASCII_TAB70[dispdata];break;default:pchardata = &ASCII_TAB20[0];break;} // end of switch(dispdata&0xf0)...if( (disp_cx&0x08) == 0 ) // 选择液晶控制芯片(即CS1--控制前8个字符即列 LCM_Wr1Command(LCM_ADDRSTRY+disp_cy); // 设置当前页地址再乘以8 LCM_Wr2Command(LCM_ADDRSTRX+i);LCM_Wr2Command(LCM_ADDRSTRY+disp_cy); // 设置当前页地址* 名称字符串显示输出disp_cy 显示起始行(0-7)* disp_cx 显示起始列(0-15)* disp_str 字串指针* 出口参数支持显示字符0-9a-z及空格模为8*8ÿÐÐ16个字符)LCM_DRIVE.H* 功能/* 显示起始行0(x<64) */#define LCM_STARTROW 0xc0/* 页起始地址(x<8) */ #define LCM_ADDRSTRY 0xb8 /* 列起始地址(x<64) */ #define LCM_ADDRSTRX 0x40 /* 定义宏函数 */#define LCM_DispClr() LCM_DispFill(0x00) /* 清屏函数 *//*********************************************************************** * 名称LCM显示初始化* 入口参数无* 注 ***********************************************************************/ extern void LCM_DispIni(void);/*********************************************************************** * 名称向指定点写数据(一字节)x x坐标值(0-127)* y y坐标值(0-63)* wrdata 所要写的数据* 出口参数LCM_DispFill()* 功能filldata 要写入LCM的填充数据* 出口参数* 名称指定地址显示字符disp_cy 显示行值(0-7)* disp_cx 显示列值(0-15)* dispdata 所要显示的字符(ASCII码)* 注a-z及空格模为8*8ÿÐÐ16个字符)LCM_DispStr()* 功能disp_cy 显示起始行(0-7)* disp_cx 显示起始列(0-15)* disp_str 字串指针* 出口参数支持显示字符0-9a-z及空格模为8*8ÿÐÐ16个字符)µãÏñËØΪ320ÆÁÄ»³ß´çΪ5.2英寸模块的电路原理框图如图5. 26所示LPC2210也没有点阵图形控制器功能 EasyARM2200开发板可以通过外设PACK来支持以SED1353F为液晶控制器的点阵图形液晶模块根据SED1353F的用户手册说明由于SED1353F工作电源是5V所以在总线上串接470VD15引脚上的状态值设置说明如下VD1为18080系列MPU接口不交换高VD4均为01)VD15即设置选择存储器接口访问基地址(位3所以电路上AB19AB17引脚要接地A22当A23IO_CS变为低电平所以其寄存器地址为0x82000000当A23A21为1时所以其数据操作地址为0x82200000图5. 26 LFUBK909XA点阵图形液晶模块原理框图图5. 27 SED1353F控制器应用连接电路使用LPC2210的总线对SED1353F操作控制前基于SED1353F控制的点阵图形液晶模块LFUBK909XA驱动程序如程序清单5. 7所示ADS1.2集成开发环境程序清单5. 6 存储器接口BANK2总线配置…LDR R0, =BCFG2LDR R1, =0x00009629STR R1, [R0]…程序清单5. 7 基于SED1353F控制的LFUBK909XA液晶模块驱动程序/***************************************************************************************** 文件名通过操作SED1353* 说明* SED1353的寄存器地址为0x8200000x****************************************************************************************/#include "config.h"/* 定义显示缓冲区(可根据情况定义或直接使用LCM显示存储空间) */TCOLOR gui_disp_buf[GUI_LCM_YMAX][GUI_LCM_XMAX];/* 定义SED1353控制地址 */#define SED1353_REG 0x82000000#define SED1353_DAT 0x82200000uint8 const INIT_TAB[14] = {0x00, // 寄存器0 -- 00000000B (正常工作模式打开显示使能LCDENB16位显示存储数据总线方式) 159, // 寄存器2 -- 159 (行字节控制)(每行显示占用的存储器字节数256彩色方式)239, // 寄存器4 -- 239 (总行数)0, // 寄存器5 -- 0 (WF翻转周期,为0时表示每一帧WF输出翻转一次)0x00, // 寄存器6 -- 00H (第一屏显示RAM地址低8位)0x00, // 寄存器7 -- 00H (第一屏显示RAM地址高8位)0x00, // 寄存器8 -- 00H (第二屏显示RAM地址低8位)0x00, // 寄存器9 -- 00H (第二屏显示RAM地址高8位)239, // 寄存器A -- 239 (显示一区占用行数)0, // 寄存器B -- 0 (显示一区占用行数正常操作模式)};/***************************************************************************** 名称初始化SED1353* 入口参数无* 说明然后赋值给SED1353相应的寄存器SED1353_LutInit()* 功能绿基色设置为07136* 入口参数无* 说明设置地址*REG_Point2 = LUT_RED_TAB[i]; // 设置红色调色板*REG_Point2 = LUT_GRN_TAB[i]; // 设置绿色调色板*REG_Point2 = LUT_BLU_TAB[i]; // 设置蓝色调色板}}/**************************************************************************** * 名称指定点显示disp_adr 显示起始地址* dat 要填充的数据* 出口参数ScreenFill()* 功能256色dat 要填充的数据* 出口参数直接对显存进行操作****************************************************************************/ void ScreenFill(TCOLOR dat){ volatile uint8 *DAT_Point;uint32 i;DAT_Point = (void *) SED1353_DAT;for(i=0; i<320*240; i++) // 填充字节数为320*240{ *DAT_Point = dat;DAT_Point++;}}/************************************************************************ 名称LCM初始化显示起始地址为0x0000ÎÞ* 出口参数***********************************************************************/ void LCD_Initialize(void){ SED1353_Init(); // 初始化LCM工作模式SED1353_LutInit(); // 初始化调色板}/*********************************************************************** * 名称LCD填充起始地址为0x0000dat 要填充的颜色数据* 出口参数LCD_UpdatePoint()* 功能* 入口参数无* 说明DAT_Point = (void *) (SED1353_DAT+addr);*DAT_Point = gui_disp_buf[y][x]; // 输出数据}/***************************************************************************** 与LCM相关的GUI接口函数****************************************************************************//***************************************************************************** 名称全屏填充* 入口参数无* 说明GUI_Initialize()* 功能初始化LCM并清屏无* 出口参数用户根据LCM的实际情况编写此函数纯图形模式 GUI_FillSCR(0x00); // 初始化缓冲区为0x00/***************************************************************************** 名称清屏无* 出口参数用户根据LCM的实际情况编写此函数GUI_Point()* 功能x 指定点所在列的位置* y 指定点所在行的位置* color 显示颜色(对于黑白色LCMΪ1时显示)* 出口参数(操作失败原因是指定* 地址超出有效范围)* 说明只有一个位有效其它位数的* 一样处理GUI_ReadPoint()* 功能x 指定点所在列的位置* y 指定点所在行的位置* ret 保存颜色值的指针* 出口参数对于单色4级灰度则为d0RGB结构则R****************************************************************************/ int GUI_ReadPoint(uint32 x, uint32 y, TCOLOR *ret){ /* 参数过滤 */if(x>=GUI_LCM_XMAX) return(0);if(y>=GUI_LCM_YMAX) return(0);/* 取得该点颜色(用户自行更改) */*ret = gui_disp_buf[y][x];return(1);}/**************************************************************************** * 名称画水平线x0 水平线起点所在列的位置* y0 水平线起点所在行的位置* x1 水平线终点所在列的位置* color 显示颜色(对于黑白色LCMΪ1时显示) * 出口参数对于单色可通过修改此函数作图提高速度而不需要一个点一个点的写到LCM中x1大小进行排列描出垂直线x0++;}while(x1>=x0);}/**************************************************************************** * 名称画垂直线x0 垂直线起点所在列的位置* y0 垂直线起点所在行的位置* y1 垂直线终点所在行的位置* color 显示颜色* 出口参数对于单色可通过修改此函数作图提高速度而不需要一个点一个点的写到LCM中y1大小进行排列描出垂直线y0++;}while(y1>=y0);}/**************************************************************************** * 名称判断颜色值是否一致color1 颜色值1* color2 颜色值2* 出口参数* 说明****************************************************************************/ //int GUI_CmpColor(TCOLOR color1, TCOLOR color2)//{ if(color1==color2) return(1);// else return(0);//}/**************************************************************************** * 名称颜色值复制color1 目标颜色变量* color2 源颜色变量* 出口参数由于颜色类型TCOLOR可以是结构类型LCDDRIVE.H* 功能刷新显示子程序****************************************************************************************/ #ifndef LCDDRIVE_H#define LCDDRIVE_H/* 定义颜色数据类型(可以是数据结构) */#define TCOLOR uint8/* 定义LCM像素数宏 */#define GUI_LCM_XMAX 320 /* 定义液晶x轴的像素数 */#define GUI_LCM_YMAX 240 /* 定义液晶y轴的像素数 *//***************************************************************************** 名称初始化GUI* 入口参数无* 说明GUI_FillSCR()* 功能* 入口参数无* 说明/***************************************************************************** 名称清屏无* 出口参数用户根据LCM的实际情况编写此函数GUI_Point()* 功能x 指定点所在列的位置* y 指定点所在行的位置* color 显示颜色(对于黑白色LCMΪ1时显示)* 出口参数(操作失败原因是指定* 地址超出有效范围)* 说明GUI_ReadPoint()* 功能x 指定点所在列的位置* y 指定点所在行的位置* ret 保存颜色值的指针* 出口参数对于单色4级灰度则为d0RGB结构则R****************************************************************************/ extern int GUI_ReadPoint(uint32 x, uint32 y, TCOLOR *ret);/***************************************************************************** 名称画水平线x0 水平线起点所在列的位置* y0 水平线起点所在行的位置* x1 水平线终点所在列的位置* color 显示颜色(对于黑白色LCMΪ1时显示)* 出口参数对于单色可通过修改此函数作图提高速度而不需要一个点一个点的写到LCM中GUI_RLine()* 功能x0 垂直线起点所在列的位置* y0 垂直线起点所在行的位置* y1 垂直线终点所在行的位置* color 显示颜色* 出口参数对于单色可通过修改此函数作图提高速度而不需要一个点一个点的写到LCM中GUI_CmpColor()* 功能color1 颜色值1* color2 颜色值2* 出口参数* 说明****************************************************************************/ //extern int GUI_CmpColor(TCOLOR color1, TCOLOR color2);#define GUI_CmpColor(color1, color2) (color1==color2)/**************************************************************************** * 名称颜色值复制color1 目标颜色变量* color2 源颜色变量* 出口参数由于颜色类型TCOLOR可以是结构类型5.3.4 触模屏驱动程序在嵌入式系统应用中常用的控制芯片有ADS7843/7846ADS7843是TI公司生产的四线式电阻触摸屏控制器3线/4线同步串行接口具有低功耗原理框图如图5. 29所示图5. 28 ADS7843引脚图图5. 29 ADS7843原理框图。
周立功单片机:分散加载文件浅释
ROM(Flash)Size = Code+RO-Data+RW-Data = 0.76KB;
RAM Size = RW-Data+ZI-Data = 2.01KB。
为什么上述的 RW-Data 既占用 Flash 又占用 RAM 么,变量不是放在 RAM 中的么,为 什么会占用 Flash?因为 RW 数据不能像 ZI 那样“无中生有”的,ZI 段数据只要求其所在 的区域全部初始化为零,所以只需要程序根据编译器给出的 ZI 基址及大小来将相应的 RAM 清零。但 RW 段数据却不这样做,所以编译器为了完成所有 RW 段数据赋值,其先将 RW 段 的所有初值,先保存到 Flash 中,程序执行时,再 Flash 中的数据搬运到 RAM 中,所以 RW 段即占用 Flash 又占用 RAM,且占用的空间大小是相等的。
2.1
基本概念 ................................................................................................................... 2
3. 分散加载文件概述...................................................................................................3
1. 何时使用分散加载 链接器的命令行选项提供了一些对数据和代码位置的控制,但要对位置进行全面控制, 则需要使用比命令行中的输入内容更详细的指令。需要或最好使用分散加载描述的情况包括: 2. 复杂内存映射 如果必须将代码和数据放在多个不同的内存区域中,则需要使用详细指令指定将哪些数 据放在哪个内存空间中。 3. 不同类型的内存 许多系统都包含多种不同的物理内存设备,如闪存、ROM、SDRAM 和快速 SRAM。 分散加载描述可以将代码和数据与最适合的内存类型相匹配。例如,可以将中断代码放在快 速 SRAM 中以缩短中断等待时间,而将不经常使用的配置信息放在较慢的闪存中。 4. 内存映射的 I/O 分散加载描述可以将数据节准确放在内存映射中的某个地址,以便能够访问内存映射的 外围设备。 5. 位于固定位置的函数 可以将函数放在内存中的固定位置,即使已修改并重新编译周围的应用程序。 6. 使用符号标识堆和堆栈 链接应用程序时,可以为堆和堆栈位置定义一些符号。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
广州周立功单片机科技有限公司
目 录
MPQ2013:40V、150mA 低静态电流线性稳压器· · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · ·1
1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 1.10 1.11 描述· · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · ·1 特性· · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · ·1 应用· · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · ·1 典型应用· · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · ·1 订购信息· · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · ·2 电气特性· · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · ·3 引脚功能· · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · ·4 典型特性· · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · ·5 典型工作特性 · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · ·6 工作· · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · ·7 应用信息· · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · ·8 1.11.1 设置输出电压 · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · ·8 1.11.2 输入电容· · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · ·9 1.11.3 输出电容· · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · ·9 1.11.4 输出噪声· · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · ·9 1.11.5 PCB 布线指南 · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · ·9 1.11.6 设计示例· · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · 10 1.12 典型应用电路 · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · 11 1.13 封装信息· · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · 13
1.3
应用
工业/汽车应用; 便携式/电池供电设备; 极低功耗微控制器; 移动手机; 医学成像。
1.4
典型应用
MPQ2013 数据手册 1
©2015 Guangzhou ZLGMCU Technology CO., LTD.Βιβλιοθήκη 广州周立功单片机科技有限公司
MPQ2013 数据手册
1.5
1.2
特性
2.5V~40V 输入范围; 3.2A 静态电源电流; 采用低值输出陶瓷电容(>0.47F)时保持稳定; 150mA 指定电流; 150mA 负载时压差为 620mV; 可使用固定输出和可调节输出(1.215V~15V) ; 输出精度为±2%; 指定电流限制; 热关断; 指定的结温范围为-40℃~+125℃; 采用 TSOT23-5、QFN6 (2x2mm)或 QFN8 (3x3mm)封装; 满足 AEC-Q100 Grade 1 标准。
订购信息
器件型号* MPQ2013GQ MPQ2013GG MPQ2013GJ** MPQ2013GQ-33** MPQ2013GQ-AEC1 MPQ2013GJ-AEC1** MPQ2013GQ-33-AEC1** 封装 QFN-8 (3mmx3mm) QFN-6 (2mmx2mm) TSOT23-5 QFN-8 (3mmx3mm) QFN-8 (3mmx3mm) TSOT23-5 QFN-8 (3mmx3mm) 顶部标识 AFF AX AFF AGG AFF AFF AGG