张力腿平台
张力腿平台

张力腿平台发展与简介导管架平台和重力平台由于其自重和工程造价随水深大幅度地增加, 已经不适应深水域油气开发, 所以本世纪60 年代提出了顺应式平台的概念, 并在近20年的平台设计中得到了广泛的发展应用。
顺应式结构的典型实例是张力腿平台(Tension LegPlatform 简称为TLP)。
张力腿平台最重要的特点是平台的竖向运动很小, 水平方向的运动是顺应式的, 结构惯性力主要是水平方向的回弹力。
张力腿平台的结构造价一般不会随水深增加而大幅度地增大。
近二十年来, 经过张力腿平台设计生产的实践,证明张力腿平台具有良好的运动性能, 是深水海域油气生产适宜的平台形式。
张力腿平台结构张力腿平台(简称TLP)适用于较深水域(300~1500m)、且可采油气储量较大的油田。
TLP 一般由上部模块(Topside)、甲板、船体(下沉箱)、张力钢索及锚系、底基等几部分组成。
其船体(下沉箱)可以是三、四或多组沉箱,下设3~6组或多组张力钢索,垂直与海底锚定。
平台及其下部沉箱受海水浮力,使张力钢索始终处于张紧状态,故在钻井或采油作业时,TLP几乎没有升沉运动和平移运动。
其微小的升沉和平移运动(平移运动仅为水深的1.5% ~2%),在钻井和完井时主要由水中和井内相对细长的钻具及专用短行程补偿器补偿张力腿平台技术特点张力腿式钻井平台是利用绷紧状态下的锚索产生的拉力与平台的剩余浮力相平衡的钻井平台或生产平台。
张力腿式钻井平台也是采用锚泊定位的,但与一般半潜式平台不同。
其所用锚索绷紧成直线,不是悬垂曲线,钢索的下端与水底不是相切的,而是几乎垂直的。
用的是桩锚(即打入水底的桩为锚)或重力式锚(重块)等,不是一般容易起放的抓锚。
张力腿式平台的重力小于浮力,所相差的力量可依靠锚索向下的拉力来补偿,而且此拉力应大于由波浪产生的力,使锚索上经常有向下的拉力,起着绷紧平台的作用。
作用于张力腿式钻井平台上的各种力并不是稳定不变的。
在重力方面会因载荷与压载水的改变而变化;浮力方面会因波浪峰谷的变化而增减;扰动力方面因风浪的扰动会在垂向与水平方向产生周期变化,所以张力腿的设计,必须周密考虑不同的载荷与海况。
深水浮式平台的类型
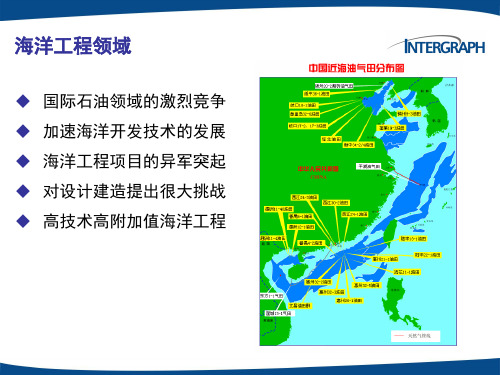
深水浮式平台的类型深海有着强大的油气资源储备。
不断涌现的各种新型采油平台技术促进着深海采油技术的高速发展,这些技术概括起来可分为四大类:张力腿式平台(TLP),单筒式平台(SPAR),半潜式平台(SEMI)和浮(船)式生产平台(FPSO)。
在每一大类中,又有很多不同的技术概念。
下面就不同型式的平台使用和特点分别做介绍。
图1:深水平台类型一、深海张力腿平台的发展概况及发展趋势图2:张力腿平台的发展自1954年美国的提出采用倾斜系泊方式的索群固定的海洋平台方案以来,张力腿平台(TLP)经过近50年的发展,已经形成了比较成熟的理论体系。
1984年第一座实用化TLP——Hutton平台在北海建成之后,TLP在生产领域的应用也越来越普遍,逐渐成为了当今世界深海采油领域的两大主力军之一(另一种当前广泛使用的深海采油平台是Spar,将在后面部分中进行详细介绍)。
进入上个世纪90年代之后,TLP平台的发展进一步加速,在生产区域方面,TLP的应用已经从北海和墨西哥湾扩展到了西非沿海;在平台种类方面,TLP已经在原有的传统类型TLP基础上,发展出了Mini-TLP、ETLP等多种新概念张力腿平台,加之不断地采用最新地科学技术,TLP平台在降低成本,提高适应性、稳定性和安全性地道路上取得了长足地进步。
下面将简要介绍张力腿平台的总体结构,然后对1990年之后TLP平台的发展状况进行详细的论述。
1、张力腿平台总体结构简介张力腿平台(TensionLegplatform,简称TLP)是一种典型的顺应式平台,通过数条张力腿与海底相连。
张力腿平台的张力筋腱中具有很大的预张力,这种预张力是由平台本体的剩余浮力提供的。
在这种以预张力形式出现的剩余浮力作用下,张力腿时刻处于受预拉的绷紧状态,从而使得平台本体在平面外的运动(横摇、纵摇、垂荡)近于刚性,而平面内的运动(横荡、纵荡、首摇)则显示出柔性,环境载荷可以通过平面内运动的惯性力而不是结构内力来平衡。
张力腿平台简介
张力腿平台简介一.第一代张力腿平台总述第一代张力腿平台,即传统类型的张力腿平台,应用时间长、分布范围广、平台数量多、设计理论成熟,在张力腿平台发展的历史中占有很重要的地位。
从1984年至今,世界上建成投入生产的传统类型张力腿平台共有11座,尚未发生过倾覆、沉没等重大事故,拥有优良的工作记录,由此坚定了业界对TLP这种新兴海洋平台结构的信心。
在其发展的20年时间里,世界各国的研究者和工程技术人员积累了丰富的设计应用经验和技术数据,为以后张力腿平台的发展打下了坚实的基础。
在已建成的11座传统类型的张力腿平台中,Shell石油公司在1994—2001年7年间连续建造的5座张力腿平台具有一定的代表性,分别为Auger、Mars、Ram、Ursa和Brutus。
通过第一代张力腿平台的生产实践,进一步证明了张力腿平台在深海域半刚性半柔性的优良运动性能和经济性,但是同时亦发现传统的张力腿平台结构形式仍存在着一定的不足。
①在水深超过1200m的极深水水域,随着张力筋腱长度的增加,出现了张力腿自重过大的问题,并且由于张力筋腱在深水中的受力情况发生改变,因此影响了平台的定位性能。
②在降低造价、改善受力情况和运动性能的方面,传统类型张力腿平台的本体结构仍需要进一步改进。
③差频载荷是一个缓慢变化的力,它将和同样缓慢变化的张力腿平台平面内的运动发生共振。
另外,风的激振力也在这个差频范围内,必然会加剧这种慢漂运动。
④波浪的高频分量和高频水动力会引起张力腿平台平面外的共振,通常称为Springing和Ringing。
张力腿平台结构这两个问题随着水深的增加而加剧,对结构的安全性有很大的影响。
⑤传统的张力腿平台是通过海底基础固定入位的,随着水深的增加,海底基础的设计、施工变得十分复杂。
因此,张力腿平台所具有的经济、安全和良好的动力特性在更深水域中均不能得到充分的发挥,传统类型的张力腿平台结构已经不能很好地适应更深的水域。
各国学者对张力腿平台结构形式的不断改进完善非常重视,因此,混合式张力腿平台及悬式张力腿平台等新型的张力腿平台便应运而生二.张力腿平台的工作原理及性能张力腿平台设计最主要的思想是使平台半顺应半刚性。
TLP平台调研

张力腿监测系统(TTMS)
目的
为确定张力筋腱的受力状态以及平台上部荷载 的分布情况,一般进行TLP张力筋腱张力测量。
冗余 容错
依据
当张力接近0甚至为负,或超过其张力许用值 时,均表明上部荷载或环境荷载超过许用值。 顶张力
提供实时和历史数据
监测内容
弯曲载荷 VIV
查询,报警功能,并 结合特定算法分析辅 助调整平台质量分配
张力腿平台受力状态
波浪周期范围 (5-20s)
3、张力腿平台的水面运动自由度(纵荡、横荡和艏 摇)运动周期与半潜式平台或SPAR平台相同,一般为 100-200s.
波频响应
浪致运动
低频响应
高频响应
涡激运动
THANKS
MOSES平台结构形式
SeaSar平台结构形式
典型TLP的结构形式
张力腿海洋平台结构示意图源自2、张力腿平台监测系统 张力腿系统(TTS) 功能
每组张力腿通常由 2-4根张力筋腱组成
张力腿产生的拉力将TLP限制在允
许的运动偏差及合理姿态和吃水范围内,实 现平台在设计环境下的生产功能需求。
张力筋腱 上端和下端接头 TTS
功能
评估 验证 辅助
TTMS 结构组成图
3、水动力性能
稳性 抗倾覆和抗滑移能力。
张力腿平台服役状态稳性来自 于张力腿的张力。因此,标准要求 进行完整和损伤分析来规范张力腿 设计以确保平台稳性 。
北海挪威钻井平台倾覆事故
张力腿设计原则
(1)最小预张力应确保在设计极 端环境条件下,张力腿的张力大于 零。
TLP平台调研(二)
徐留洋
2017.03.21
1
2
3
1、张力腿平台
张力腿平台

MOSES TLP的主体由四 根细长角柱和一个水下浮式 基座构成。平台的浮力主要 由水下浮式基座提供。
ETLP
9
按采油树位置分类
湿树平台 采油树位于海底。减少了平台上体的负载,不需要建造体 积庞大的平台主体,因而降低了平台的总体造价,湿树平台的 生产储备能力具有很大的弹性,新增的设备和海底油井容易加 装到现有的生产系统中,对油田的远期开发比较方便。
5
建造与安装过程
张力腿平台通常是将平台主体和上体分开建造,然后在海上进行合拢。
SeaStar TLP的整个安装过程可以分为4个独立的阶段进行。每个阶段耗时 都较短,并且当每个安装阶段结束后.己完成安装的平台部分都处于风暴 安全状态.可以最大程度地缩短平台处于不稳定状态中的时间,降低了作 业风险。
7
第一代张力腿平台
Heidrun TLP建成于1995年,位 于北海距挪威海岸175km的海域,工 作水深345m。 Heidrun TLP是世界上第一座也 是惟一的一座混凝土张力腿平台。因为 其主体构造采用了混凝土结构,所以主 体排水量远远超过其他钢制张力腿平台, 达到了288000t左右。 从1984年至今,世界上建成投入 生产的传统类型张力腿平台共有11座, 尚未发生过倾覆、沉没等重大事故,拥 有优良的工作记录,由此坚定了业界对 TLP这种新兴海洋平台结构的信心。
张力腿平台通过自身的结构形式,产生远大于结构自重的 浮力,剩余部分称为剩余浮力。这部分剩余浮力与预张力 平衡。
半顺应半刚性:
预张力使张力腿时刻处于受张拉的绷紧状态,从而使平台 平面外的运动(横摇、纵摇和垂荡)较小,近似于刚性。 张力腿平台本体主要是直立浮筒结构,一般浮筒所受波浪 力的水平方向分力较垂直方向分力大,因而通过张力腿在 平面内的柔性,实现平台平面内的运动(纵荡、横荡和首 摇),即为顺应式。
张力腿平台及其基础设计

综述 文章编号:1005-9865(2000)04-0063-06张力腿平台及其基础设计X 董艳秋,胡志敏,张 翼(天津大学海洋与船舶工程系,天津 300072)摘 要:海洋工程油气开发逐步向深海域进军,资料表明21世纪深海的石油、天然气将是主要能源之一。
目前主要的深海石油平台形式是张力腿平台,其结构一般由平台本体、张力腿系统和基础系统三部分组成。
基础部分不但承受着结构上部及海底的各种载荷,而且为结构提供必要的稳定性和安全性。
本文通过对当今世界已建成投产的9座深海张力腿平台及其基础形式进行分析,剖析它们的基础设计思想,为我国深海张力腿平台的设计提供参考。
关键词:深海域;张力腿平台;平台基础中图分类号:P 73.22;U 674.38 文献标识码:ADesig n of T LP and its foundationDON G Y an -qiu ,H U Zhi -min ,ZH A N G Yi(Depar tment of O cean Eng.and N aval A rch.,T ianjin U niv ersity ,T ianjin 300072,China)Abstract :With the development o f ocean eng ineering ,oil a nd g as w ill be t he main natur al ener g y r esources in the present cent ur y.T her e ar e br oad sea reg inons in China.Ex plo rat ion sho ws t hat ther e ar e plenty o f g as and oil in the So uth China Sea.T her efor e,it is impor tant to ex plo it the deep water.T he T ensio n L eg P lat for m (T LP )has been fo und suit able for w or king in the deep w ater due t o it s favo rable mot ion char act erist ics and low cost.Recently,T L P is used as t he main platfo r m in the deep w ater .It consists of thr ee par ts :hull ,tendo ns and fo undation .T he fo undatio n is a n impo rt ant par t w hich a ffecs the stability and safety of the w hole str uctur e.In this paper,T L Ps that hav e been constructed in the w o rld ar e analy zed including the desig n of their fo undatio ns.Some useful conclusio ns and pr opo sials can be refer red to in the desig n of T L P in China.Key words :deep wa ter ;T L P ;founda tio n早期的海上石油开采主要是面向近海,随着全球对能源需求量的不断增加,技术的革新和完善对深海域的开发生产成为可能。
设计波法在张力腿平台设计中的运用

设计波法在张力腿平台设计中的运用单击此处编辑副标题 黄 佳2015年8月20日一、设计基础 二、设计波法原理 三、短期预报 四、长期预报 五、总结设计基础平台状态 完整 HULL破舱-无压载补偿 HULL破舱-有压载补偿 Tendon破损-无压载补偿 Tendon破损-有压载补偿 Tendon移除-有压载补偿 B 作业工况 1-Year A B S B S B B S S S 折减后的 极端工况 生存工况 钻井作业工况 极端工况 10-Year B S A 内波作业工况100-Year 1000-Year 10-year非台风 1-year非台风+内波 A设计寿命20年 根据APIRP2T规范,Loadcase分为三个等级,A、B、S注:A:作业工况;B:极端工况;S:生存工况;设计基础1 1000-year 2 100-year 3 10-year 4 1-year Max Wave and Associated Wind & Current Environment Condition SummaryTropical Cyclone Tropical Cyclone Tropical Cyclone Tropical Cyclone Survival Case Jonswap 2.4 Omni Omni 16.50 17.2 13.7 27.6 17.2 2.40 0.00 -1.12 0.00 Extreme Case Jonswap 2.4 Omni Omni 13.60 16.3 11.6 23.5 14.9 1.86 0.00 -1.09 0.00 Reduce Extreme Jonswap 2.4 Omni Omni 10.30 15.1 9.6 17.8 10.9 1.39 0.00 -1.08 0.00 Normal Operating Jonswap 2.4 Omni Omni 7.50 13.9 8.3 12.9 8.6 1.12 0.00 -1.03 0.00风 浪 流Wave Gamma Heading (Wamit) Direction (TN, from) Significant wave ht (Hs) Spectral peak period (Tp) Wave cross period (Tz) Maximum wave ht Maximum crest ht Tide & Surge: Highest Water Level Tide & Surge: Mean Water Level Tide & Surge: Lowest Water Level Subsidence(deg) (m) (sec) (sec) (m) (m) (m) (m) (m) (m)4设计基础风暴工况(tropicalcyclone)取条件极值 非风暴工况(non-tropicalcyclone)取主极值设计基础在等级B,S下,环境条件均采用条件极值 OMNI设计基础设计基础回归周期的意义 P为单次响应的超越概率,t为单次响应的平均跨零周期,Tr为回归周期 P=t/Tr 举例说明,某海域波浪平均跨零周期10s,回归周期为100年,单个波浪 超越100年一遇波高的概率为 10s/100年 =3.17X10-9 设计寿命期间的遭遇概率设计寿命 20 25 30 20 25 30 20 回归周期 100 100 100 500 500 500 1000 遭遇概率 18.13% 22.12% 25.92% 3.92% 4.88% 5.82% 1.98%Tendon刚度张力腿平台水平位移offset 与垂向位移setdown的关系提示!注意区别setdown与heave张力腿张力=预张力+刚度 X伸长总体运动性能一、设计基础 二、设计波法原理 三、短期预报 四、长期预报 五、总结设计波法作用:根据环境条件选取一定的设计工况用来对结构进行校核。
张力腿平台TensionLegPlatformTLP
• 项目庞大 • 工期短,交付期限要求严格 • 设计变更频繁,各设计阶段重
叠 • 参与方众多,信息流复杂 • 完工交付资料要求高,以便于
运营和维护
严格的技术要求
• 服务海域海况、气象条件恶劣 • 技术要求高 • 技术含量高、广泛采用新技术和
高科技产品
• 装备及操作人员生存条件高 • 海上装备集成程度高、对完工期
双浮筒半潜式平台
四浮筒半潜式平台
张力腿平台 Tension Leg Platform (TLP)
张力腿平台的上部类似于半潜式平台,整个平台通过张力腿(系泊钢管或钢索) 垂直向下固定于海底。
与导管架平台不同的是,它的造价随水深的增加变化较小。 此外由于每个张力腿都有很大的预张力,其在波浪中的运动性能要好于半潜式平
台,这对深海作业十分有利,是一种很有发展前途的新型平台。
单柱体平台 Spar Platform
Edward E. Horton 在柱形浮标(Spar)和 张力腿平台概念的基础上提出了一种用 于深水的生产平台,即单柱体平台。
单柱体平台的上部甲板由一根直径达数 十米、长一、二百米的圆筒形柱体结构 支撑。柱体下方用垂向的或斜向张力索 系泊定位,具有很好的稳性及运动性 能。
平台的储油能力要求不高时,可以将圆 筒型主体结构的一部分改为桁架结构, 并在桁架下部加压载,这种结构形式更 轻更加经济有效。
浮式生产储油轮 Floating Production Storage & Offloading Unit - FPSO
内转塔FPSO 外转塔FPSO FSO
外转塔FPSO
单柱体平台
2. 浮式生产储油轮 FPSO/FSO
3. 海洋工程辅助船舶
张力腿平台
张力腿平台发展与简介导管架平台和重力平台由于其自重和工程造价随水深大幅度地增加, 已经不适应深水域油气开发, 所以本世纪60 年代提出了顺应式平台的概念, 并在近20年的平台设计中得到了广泛的发展应用。
顺应式结构的典型实例是张力腿平台(Tension LegPlatform 简称为TLP)。
张力腿平台最重要的特点是平台的竖向运动很小, 水平方向的运动是顺应式的, 结构惯性力主要是水平方向的回弹力。
张力腿平台的结构造价一般不会随水深增加而大幅度地增大。
近二十年来, 经过张力腿平台设计生产的实践,证明张力腿平台具有良好的运动性能, 是深水海域油气生产适宜的平台形式。
张力腿平台结构张力腿平台(简称TLP)适用于较深水域(300~1500m)、且可采油气储量较大的油田。
TLP 一般由上部模块(Topside)、甲板、船体(下沉箱)、张力钢索及锚系、底基等几部分组成。
其船体(下沉箱)可以是三、四或多组沉箱,下设3~6组或多组张力钢索,垂直与海底锚定。
平台及其下部沉箱受海水浮力,使张力钢索始终处于张紧状态,故在钻井或采油作业时,TLP几乎没有升沉运动和平移运动。
其微小的升沉和平移运动(平移运动仅为水深的1.5% ~2%),在钻井和完井时主要由水中和井内相对细长的钻具及专用短行程补偿器补偿张力腿平台技术特点张力腿式钻井平台是利用绷紧状态下的锚索产生的拉力与平台的剩余浮力相平衡的钻井平台或生产平台。
张力腿式钻井平台也是采用锚泊定位的,但与一般半潜式平台不同。
其所用锚索绷紧成直线,不是悬垂曲线,钢索的下端与水底不是相切的,而是几乎垂直的。
用的是桩锚(即打入水底的桩为锚)或重力式锚(重块)等,不是一般容易起放的抓锚。
张力腿式平台的重力小于浮力,所相差的力量可依靠锚索向下的拉力来补偿,而且此拉力应大于由波浪产生的力,使锚索上经常有向下的拉力,起着绷紧平台的作用。
作用于张力腿式钻井平台上的各种力并不是稳定不变的。
在重力方面会因载荷与压载水的改变而变化;浮力方面会因波浪峰谷的变化而增减;扰动力方面因风浪的扰动会在垂向与水平方向产生周期变化,所以张力腿的设计,必须周密考虑不同的载荷与海况。
深水浮式平台的类型
深水浮式平台的类型深海有着强大的油气资源储备。
不断涌现的各种新型采油平台技术促进着深海采油技术的高速发展,这些技术概括起来可分为四大类:张力腿式平台(TLP),单筒式平台(SPAR),半潜式平台(SEMI)和浮(船)式生产平台(FPSO)。
在每一大类中,又有很多不同的技术概念。
下面就不同型式的平台使用和特点分别做介绍。
图1:深水平台类型一、深海张力腿平台的发展概况及发展趋势图2:张力腿平台的发展自1954年美国的提出采用倾斜系泊方式的索群固定的海洋平台方案以来,张力腿平台(TLP)经过近50年的发展,已经形成了比较成熟的理论体系。
1984年第一座实用化TLP——Hutton平台在北海建成之后,TLP在生产领域的应用也越来越普遍,逐渐成为了当今世界深海采油领域的两大主力军之一(另一种当前广泛使用的深海采油平台是Spar,将在后面部分中进行详细介绍)。
进入上个世纪90年代之后,TLP平台的发展进一步加速,在生产区域方面,TLP的应用已经从北海和墨西哥湾扩展到了西非沿海;在平台种类方面,TLP已经在原有的传统类型TLP基础上,发展出了Mini-TLP、ETLP等多种新概念张力腿平台,加之不断地采用最新地科学技术,TLP 平台在降低成本,提高适应性、稳定性和安全性地道路上取得了长足地进步。
下面将简要介绍张力腿平台的总体结构,然后对1990年之后TLP平台的发展状况进行详细的论述。
1、张力腿平台总体结构简介张力腿平台(TensionLegplatform,简称TLP)是一种典型的顺应式平台,通过数条张力腿与海底相连。
张力腿平台的张力筋腱中具有很大的预张力,这种预张力是由平台本体的剩余浮力提供的。
在这种以预张力形式出现的剩余浮力作用下,张力腿时刻处于受预拉的绷紧状态,从而使得平台本体在平面外的运动(横摇、纵摇、垂荡)近于刚性,而平面内的运动(横荡、纵荡、首摇)则显示出柔性,环境载荷可以通过平面内运动的惯性力而不是结构内力来平衡。
张力腿平台短周期运动响应特性及影响因素分析

平台控制策略优化设计
总结词
提高控制精度、增强抗干扰能力、实现快 速响应
VS
详细描述
研究优化平台的控制策略,包括对锚链张 力的控制、对平台姿态的控制等,以提高 控制精度,增强抗干扰能力,并实现快速 响应。
平台环境适应性优化设计
总结词
增强平台环境适应性、降低环境因素的影 响
详细描述
通过研究平台在不同环境条件下的响应特 性,优化平台的设计,以增强平台对环境 的适应性,并降低环境因素对平台性能的 影响。
控制参数选择
在选择控制策略后,控制参数的选择也会影响平台的运动响应。例如,在PID控 制中,比例、积分和微分参数的选择会对平台的运动产生直接影响。
04
张力腿平台的优化设计研 究
平台结构优化设计
总结词
提高平台稳定性、降低能耗、减轻重量
详细描述
通过分析平台结构的力学特性,研究优化平台的主船体、张 力腿、锚链等关键部件的设计,以提高平台的稳定性,并降 低平台的能耗和重量。
实验结果与理论分析的对比与讨论
要点一
对比分析
要点二
讨论
将实验结果与理论分析进行对比,验证了理论模型的准 确性,发现了实验中一些特殊情况下的误差和不足。
对实验结果和理论分析进行了深入讨论,提出了改进实 验和理论模型的建议,为后续研究提供了参考。
感谢您的观看
THANKS
根据平台运动方程的形式和特点,选择合适的求解 方法,如数值积分法、解析法等。
数值积分
采用数值积分法对平台运动方程进行求解,得到平 台运动响应的时间历程。
结果分析
对求解结果进行分析,包括位移、速度、加速度等 响应特征。
平台运动特性的分析方法
时域分析
SeaStar系列张力腿平台的建造与安装初探

。
,
已逐 步扩展 到全 球
根 据 张力腿 平台结 构形 式进化的阶段 大致可 将它们 分为两 个大类 即第一 代 张 力腿平 台和 第 J l 二 代 张 力 腿平 台 [ 第 一 代 张 力腿平 台又 称为传 统类 型 的张力腿 平 台 它 出现 的时 间最 早 目前 共
,
。
,
,
,
有 10 座
o l o
Ho n
yn g a
,
So g n
i l
O Y 心 仙g
,
y g
Re s
ea c h r
”t t t iU e
S ha n
hi g a
Z( X 32 C h 恤a X) )
,
e h n w I e l e n y P id iU y o n o i 助 g P 山叮m n 飞P) h 加 d e p d 6 t a d 衍业 I a Pl e 袱 山加 l t m r t a t t y s a o n h u n 。 u o n e s e a ve 。限 wr s a n S t P i i I a Pl a t c l i d t i U r tr t s f e a r l x n d h i g d a ly e p a d e t m a 价h o 训e c 丘d 山 i 此 o ld T b t C u s e o T L P h l y l o a s 加e n e v o 】e i h i a n n s f o s d n o e t 忍加Pt t e d e Pw a扭, n “月 o o f h咐 0 e x Plo t o a d t 以刀 o 而 c o c n 仕以范o n f s 1 i e h d r r o s a es j u n N 5 叮 s x a e nn t u f a e evl o w a o a d y t f m ily o T L P h v d e 脚刃 化公 t押. 助d i w o d t k t 5 0 1 。 钾伴 T L P a e n Pl i t 刃 d g e h a l e h s h t e s如 c tu 比 a d n a a n n 佃 c o 助川yz g t c s t ”c t o n f o w o t s d a d ha a d 此 i s t l o c o 切r e 加 加g t i t n f o ie n l D l t i n e n i h o l i l P e h 优 n 沈5 l i g i f t 比 U ee rf r o o e u i f h m b d n u n
张力腿平台湿拖稳性校核及方案调整分析

张力腿平台湿拖稳性校核及方案调整分析近年来,随着科技的发展,许多新的技术和新的技术理论正在推动钻井工程的发展,张力腿平台以其独特的设计,在钻井领域发挥重要的作用,它变得越来越受到重视。
在新科技的影响下,张力腿平台在稳定性校核上也变得格外关注。
张力腿平台作为一种钻井结构,其稳定性校核是其安全工作的基础,因此,对张力腿平台稳定性的校核及方案调整分析就显得尤为重要。
首先,在进行张力腿平台稳定性校核时,需要考虑其结构特点,它是一种结合了膨胀腿和张力腿的双重支撑系统,它可以在水平和垂直方向上承受拖力。
因此,在进行张力腿平台稳定性校核时,必须考虑膨胀腿和张力腿系统在水平和垂直方向上的稳定性。
其次,在张力腿平台稳定性校核时,需要考虑其张力腿系统的安全系数等指标,以确保它能够稳定地承受外力而不发生倾斜等情况,以保证工作的安全性。
另外,在张力腿平台的稳定性校核中,还必须考虑其设计中的参数,例如膨胀腿和张力腿的长度、拉索的型号、张力等,这些参数的选择将直接影响张力腿平台的稳定性能。
此外,为了保证张力腿平台稳定性的校核,还需要考虑其与陆地环境等因素之间的相互作用,例如地表液体在钻井工程中可能产生的垂直应力,地表下方的沉积物对张力腿系统的影响等。
最后,在完成张力腿平台稳定性校核后,为了保证工程安全性,还需进行方案调整,如根据实际情况选择拉索型号,调整张力腿的长度,改变膨胀腿的间距等,以保证张力腿平台的稳定性。
综上所述,张力腿平台稳定性校核及方案调整分析,对于保证钻井工程安全性具有重要意义,必须进行系统而周密的分析,并结合实际情况做出相应的调整。
只有这样,才能保证张力腿平台的稳定性,确保钻井工程的安全性。
以上就是关于张力腿平台湿拖稳性校核及方案调整分析的论述,希望对大家有所帮助。
海洋工程张力腿平台的结构设计研究

海洋工程张力腿平台的结构设计研究发布时间:2021-07-05T05:03:45.010Z 来源:《全球城市研究》2021年第2期作者:陈希远鲁华伟[导读] 而张力腿平台在其中属于最典型的顺应式平台,所以有必要针对海洋石油工程张力腿平台的结构设计展开论述,希望以此能够进一步推进我国海洋石油工程的开发进程。
海洋石油工程股份有限公司天津 300000摘要:随着海洋石油工程的不断开发,使得近海水域难以满足全球能源的需求,促使开发的方向转向的深海水域,但是原来传统模式下的平台难以使深水海洋石油开发作业得到满足,而通过顺应式平台的运用下,能够将其中存在的问题予以解决。
而张力腿平台在其中属于最典型的顺应式平台,所以有必要针对海洋石油工程张力腿平台的结构设计展开论述,希望以此能够进一步推进我国海洋石油工程的开发进程。
关键词:海洋工程;张力腿平台;结构设计引言:海洋石油工程早期阶段主要是在近海海域开展的,但是在全球能源需求量的不断推进下,在相关领域的技术发生了重大变革与创新,使得我们开发的目标逐渐向深海海域发展。
由于原来传统模式的平台受到自身重量、工程造价的因素影响,使其在深水海域的油气开发之中不再适用。
顺应式平台这一概念尽管是在上个世纪被提出的,但是在当前阶段的平台设计之中,依然能够获得极为广泛的应用,而张力腿平台在顺应式平台之中就属于一个典型的实例。
1.张力腿平台的结构特点分析 1.1运动响应非常良好张力腿平台在实际使用中,具有非常良好的运动响应特性。
张力腿平台的结构形式类似于顺应式结构物。
平台处于海洋水域之中,会遭受到海、浪、流等这些海洋环境载荷等众多外力的作用,在这种情况下发生运动将会产生一种惯性力,这种惯性力能够对一部分的环境载荷外力进进行抵消,从而使得作用于平台结构上面的净载荷能够减少。
1.2半顺应半固定式结构形式该种平台结构的形式具有半顺应半固定式的特点,当其处于水平方向的时候属于顺应式结构,当其处于竖直方向的时候属于固定式结构。
海洋石油工程张力腿平台的结构设计

海洋石油工程张力腿平台的结构设计逢建涛,宋鲁峰,尹宝瑞,刘广辉,杜子荣(海洋石油工程(青岛)有限公司)摘要:因为导管架平台和重力式平台自身重量和工程造价随水的深度大幅的增加,因此不再适应深水海域油气的开发。
顺应式平台的 概念在上个世纪被提出,并在之后多年的平台设计中得到非常广泛的应用。
其中,张力腿平台属于顺应式平台当中的典型实例。
关键词:张力腿;平台设计;工况;结构分析中图分类号:TE952 文献标识码:A 文章编号:208 - 221X(2222)27 - 238 - 2)海上石油开采在早期主要是面向近海海域,随着全球能源 需求量的不断增大,技术的变革和创新使得深海海域的开发生 产可能性越来越大。
因为导管架平台和重力式平台自身重量和工程造价随水的深度大幅的增加,因此不再适应深水海域油气的开发。
顺应式平台的概念在上个世纪被提岀,并在之后多年的平台设计中得到非常广泛的应用。
其中,张力腿平台属于 顺应式平台当中的典型实例。
)结构特点).8很好的运动响应特性。
张力腿平台跟顺应式结构物类似。
平台在海、浪、流等海洋环境载荷等外力的作用下发生运动时会产生一种惯性力,这种惯性力能够抵消一部分的环境载荷外力,从而使作用在平台结构上的净载荷变小。
)4由于平台的结构形式为半顺应半固定式,在水平方向是顺应式结构,在竖直方向是固定式结构。
由于这一结构形式特点,张力腿平台保留了传统固定式平台的很多作业优势,与传统固定式平台相比其生产与维护作业方式几乎相似,其操作方式与固定式平台几乎没有任何差别。
并且对深海油田而言,因 为张力腿平台的结构造价不会随着水的深度的增加而大幅的提高,从开发费用角度来看,张力腿平台比固定式平台要低许多。
2设计工况2. 8设计工况即综合考虑各种载荷的组合,这些载荷包含项目阶段、系统工况和环境条件。
设计者应该关注一些建议性的情况以确保所有相关的设计工况都被考虑在内。
24对于每种设计工况而言,平台的设计应该考虑多种对结构 产生最严重影响的载荷工况。
中国海洋平台的现状与发展浅析
中国海洋平台的现状与发展浅析摘要:未来的油气能源将继续在世界能源需求中占据主导地位,海洋石油已成为未来世界石油开采的主要来源。
在面临世界各国对人类共同拥有的深海资源激烈竞争的形势下,须高度重视对深海平台技术的研究。
目前主要投入使用的海洋平台主要有四种:张力腿平台,半潜式平台,浮式平台,单柱式平台(spar )。
近年来我国虽然在海洋平台建造及技术研究方面做了大量工作,并取得了可喜的成绩,但就海洋装备技术实力和技术水平而言,我国与发达国家之间还存在着很大的差距。
因此,我国必须加快科研步伐,早日步入世界海洋石油装备强国行列。
1 世界海洋石油资源的背景目前,世界石油工业正面临着极大的挑战。
全球油气储量增长乏力,远远无法弥补每年的产量。
然而全球的油气消耗量仍将以较快的速度增长。
根据国际能源署发布的世界能源展望预测,世界石油需求在2030 年之前将保持年均 1.6%的增长,到2030 年达到57.69 亿吨。
天然气需求在2030年之前将保持年均 2.4%的增长,到2030 年达到42.03 亿吨油当量。
未来的油气能源将继续在世界能源需求中占据主导地位,到2030 年油气需求将占世界能源总需求的65%。
天然气资源估计将在2015 年超过煤炭资源成为第二大能源种类.随着陆上石油资源的日渐枯竭,海洋石油已成为未来世界石油开采的主要来源。
随着中国经济的发展,特别是作为支柱产业的石油化工和汽车工业的快速发展,石油和天然气供应不足的矛盾日益突出。
我国从1993 年开始,原油供应皿满足不了市场需求,因而从石油出口国变为石油进口国。
2 海洋平台技术的价值己探明的世界海洋石油储量的80%以上在水深500m以内,而全部海洋面积的90%以上水深在200 一6000m之间,因而大量的海域而积有待探明。
此外,世界上除了少数海域以外,大部分地区的近海油气资源己口趋减少,向深海发展己成必然趋势,深海平台技术己成为国际海洋工程界的一个热点,进行了大量的研究,新的深海平台结构不断涌现。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
按照功能和应用方式分类 可以分为大载荷张力腿平台、迷你型张力腿平台、井口张力腿平 台三大类;
水下采油树的使用始于1967年。水下采油 树(Christmas tree),应用于石油工业, 主要用于悬挂下入井中的油管柱,密封油 套管的环形空间,控制和调节油井生产, 保证作业,录取油,套压资料,测试及清 蜡等日常生产管理。
8
第二代张力腿平台
第二代张力腿平台出现于20世纪90年代初期,在继承传统类型张力 腿平台优良运动性能和良好经济效益的同时,对结构形式进行了优化 改进,使张力腿平台更适合于深海环境,并且降低了建造成本。
SeaStar TLP的平台 主体是由一个垂直悬浮 的圆柱体结构和三根矩 形截面的水平浮筒组成。
7
第一代张力腿平台
Heidrun TLP建成于1995年,位 于北海距挪威海岸175km的海域,工 作水深345m。 Heidrun TLP是世界上第一座也 是惟一的一座混凝土张力腿平台。因为 其主体构造采用了混凝土结构,所以主 体排水量远远超过其他钢制张力腿平台, 达到了288000t左右。 从1984年至今,世界上建成投入 生产的传统类型张力腿平台共有11座, 尚未发生过倾覆、沉没等重大事故,拥 有优良的工作记录,由此坚定了业界对 TLP这种新兴海洋平台结构的信心。
ቤተ መጻሕፍቲ ባይዱ
井口张力腿平台(Tension Leg Wellhead Platform,TLWP)是一 种经济型的张力腿平台。井口张力腿不能独立进行生产工作,在 它的平台上体只安装有控井设施,而其他的石油生产和处理设施 都安装在一艘位于平台附近的辅助生产设施上,如FPSO(浮式 生产储油装置)等。
11
谢谢观看!
MOSES TLP的主体由四 根细长角柱和一个水下浮式 基座构成。平台的浮力主要 由水下浮式基座提供。
ETLP
9
按采油树位置分类
湿树平台 采油树位于海底。减少了平台上体的负载,不需要建造体 积庞大的平台主体,因而降低了平台的总体造价,湿树平台的 生产储备能力具有很大的弹性,新增的设备和海底油井容易加 装到现有的生产系统中,对油田的远期开发比较方便。
张力腿平台通过自身的结构形式,产生远大于结构自重的 浮力,剩余部分称为剩余浮力。这部分剩余浮力与预张力 平衡。
半顺应半刚性:
预张力使张力腿时刻处于受张拉的绷紧状态,从而使平台 平面外的运动(横摇、纵摇和垂荡)较小,近似于刚性。 张力腿平台本体主要是直立浮筒结构,一般浮筒所受波浪 力的水平方向分力较垂直方向分力大,因而通过张力腿在 平面内的柔性,实现平台平面内的运动(纵荡、横荡和首 摇),即为顺应式。
第一阶段:海底基础的安装(2~5天)。 第二阶段:张力腿的安装(2~5天)。 第三阶段;平台主体的安装(1天)。
第四阶段:平台上体的安装(1天)。
6
主要类别及特点
按照总体结构分类 可以分为两个大类,即第一代张力腿平台和第二代张力腿平台; 按照采油树位置不同分类 可以划分为湿树平台和干树平台两大类;
干树平台 采油树则位于平台之上。维修方便,易于管理,张力腿平 台优良的运动性能,使其在安装干树系统方面具有很大的优势。
10
按照功能和应用方式分类
大载荷张力腿平台(largedeckload TLP)是历史最悠久的一种类 型,之所以得到业界的青睐,主要原因就在于它能够安装干树采 油系统。但是,由于其高昂的造价和对极深水环境的不适应性, 以及当工作水深超过1200 m 时张力筋腱自重过大的问题,人们现 在已经逐渐失去了对建造大载荷张力腿平台的兴趣。 迷你型张力腿平台(Mini-TLP)通过对结构上的改进,从而达到 以更小吨位获得更大有效载荷的目标。具有体积小、造价低、灵 活性好、受环境载荷小等优点,适合于开发中小油田。迷你型张 力腿平台能够在极深水环境中稳定地工作。
深海工程技术·第2小组
张力腿平台简介
小组成员:孔丹雅 李伟 李翔 苏朋 张耀泽
LOGO
主要内容
主要结构 工作原理及性能 建造与安装过程 类型及其特点
LOGO
1
概述
海洋平台 钻井平台 生产平台
导管架平台 坐底式平台
SPAR平台
自升式平台
半潜式平台
张力腿平台 TLP
2
结构
3
工作原理
4
工作特点
良好的运动性能 较大的环境载荷能够通过惯性力来平衡,而不需要通过结构内力 来平衡。 较高的安全性 平台平面内的运动固有频率低于波浪频率,而平面外的运动固有 频率高于波浪频率。整个结构的频率跨越在海浪的一阶频率谱两端, 从而避免了结构和海浪能量集中的频率发生共振。 适用水深300-1500米
5
建造与安装过程
张力腿平台通常是将平台主体和上体分开建造,然后在海上进行合拢。
SeaStar TLP的整个安装过程可以分为4个独立的阶段进行。每个阶段耗时 都较短,并且当每个安装阶段结束后.己完成安装的平台部分都处于风暴 安全状态.可以最大程度地缩短平台处于不稳定状态中的时间,降低了作 业风险。