机器人与计算机之间的通信编程.
工业机器人离线编程(FANUC) 第四章、机器人的协调与通信
第四章机器人协作与控制器间的通信当机器人工作单元需要多机同时工作完成任务时,就存在着多机器人之间的协调动作问题。
在Roboguide中,多机之间的协调主要通过对控制器的编程控制来实现。
其中,就包含了一个控制器控制多台机的同步运行和不同控制器之间的信号通信技术。
控制器中的Group(组)技术就能够实现控制器对多台机器设备的同步控制;也可以通过两个控制器的IO信号实现控制器间的同步问题。
本章通过“三机协调焊接案例项目(项目五)”的实施重点介绍这两种协调方式,分为三个部分,一、Roboguide环境Group(组)的添加与使用技术;二、IO 信号的添加与使用创建技术;三、创建一个三机配合完成焊接任务的项目案例。
4.1 控制器Group分组技术4.1.1 添加Group创建一个工作站(Workcell),如图4.1所示,在第一步选择HandlingPRO;图4.1 创建机器人焊接工作站第二步输入工作站名称,其它步骤采用默认设置,直到第七步,按照图 4.2选择一个焊接机器人作为Group 2;图4.2 机器人焊接工作站配置之后继续,直到Finish,然后,就进入系统的配置进程。
参数配置依次依照图4.3(a)-(e)输入:(a)(b)(c)(d)(e)图4.3 工作站的配置过程最后,进入到工作站的仿真环境中,该环境中有两台机器人,一台归属第一组GP:1,用于搬运的机器人GP:1-R-2000iB/165F;另一台是用于焊接的机器人,归属第二组GP:2,用于焊接的机器人GP:2-ARC Mate 100iB SA(R-30iB);具体如图4.4所示:图4.4 工作站的仿真环境(1)用鼠标拖动机器人改变两个机器人的位置,并为焊接机器人添加一个基座Fixture,布景如图4.5所示:图4.5 工作站的仿真环境(2)4.1.2 示教编程先做一个简单的移动程序,即:两个机器人在P1点和P2点之间的循环运动。
这里,P1、P2点的信息都包含了两个机器人的坐标,它们的示教过程如下:(1)、示教P1点A)、如图4.6所示,先在Cell Browser树形窗口中选中GP:1-R-2000iB/165F,然后使用示教单元,移动搬运机器人的末端到该机器人的期望位置;显示为G1组选中GP:1-R-2000iB/165F图4.6:示教P1点(1)B)、如图4.6所示,先在Cell Browser树形窗口中选中GP:2-ARC Mate 100iB SA(R-30iB),然后使用示教单元,移动焊接机器人的末端到该机器人的期望位置;显示为G2组选中GP:2-ARC Mate 100iB SA(R-30iB)图4.6:示教P1点(2)C)、通过程序编辑器,记录下P1点的运动指令如图4.7所示:图4.7:P1点运动指令(2)、示教P2点按照上述操作,分别改变两个机器人的末端位置,示教P2点,并记录下P2点的运动指令。
fanuc通信协议 python

fanuc通信协议 pythonFanuc通信协议是用于Fanuc机器人与外部设备之间进行数据传输和通信的协议。
在工业自动化领域,Fanuc机器人被广泛应用于生产线上的各种任务,如焊接、拧紧、搬运等。
而Python作为一种强大的编程语言,可以与Fanuc机器人进行通信,实现对机器人的控制和监控。
Fanuc通信协议采用了基于以太网的TCP/IP协议栈,并使用Fanuc自定义的数据格式进行数据传输。
通过Fanuc通信协议,Python程序可以向Fanuc机器人发送指令,如启动、停止、运动控制等,同时也可以获取机器人的状态信息,如位置、速度、力传感器数据等。
在使用Fanuc通信协议进行Python编程时,首先需要建立与机器人的连接。
可以通过Fanuc提供的Python库或第三方库来实现与机器人的通信。
通常情况下,需要使用机器人的IP地址和端口号来建立连接。
连接成功后,就可以向机器人发送指令或获取机器人的状态信息了。
在发送指令时,可以使用Fanuc通信协议定义的指令集,如启动机器人、运动控制、获取状态信息等。
这些指令可以通过Python的socket库来发送给机器人。
同时,也可以通过Fanuc通信协议提供的函数来简化指令的发送过程,使得编程更加方便和快捷。
在获取机器人的状态信息时,可以使用Fanuc通信协议提供的函数来获取机器人的位置、速度、力传感器数据等。
这些信息可以用于机器人的控制和监控,实现对机器人的精准控制。
Fanuc通信协议还支持与其他设备的通信。
通过Fanuc通信协议,Python程序可以与其他设备进行数据交换,实现设备之间的协同工作。
例如,可以将机器人的状态信息发送给其他设备进行分析和处理,或者将其他设备的指令发送给机器人进行执行。
总结起来,Fanuc通信协议为Python与Fanuc机器人之间的通信提供了便利。
通过使用Fanuc通信协议,Python程序可以实现对机器人的控制和监控,以及与其他设备的数据交换。
机器人与计算机之间的通信编程
( p o ft ainMes rme t eh o g o [sr met b n h l i tn iest- 0 0 0 De . f nom t aue n cn l ya I o T o d ntu n,S a g a Ja o gUnv ri 2 0 3 ) o y 【Ablatl hs a e b ig u o src T i p pr rn s o t a e mmu ai po rmmig meh d b t e rb ta d e tra cmp tr ae i n t n rg a o n lo e wen o o n x n l o ue b sd Ol e RP C
c m mu i a i me h d.t r bo b s d n o nct on to he o t a e o CZ mo e d s rbu e e nt oln a w ' r s s m mo l s c c l d Furhe mo e S d l i ti t d o r ll g e o k y t e de i r a . o t r r .DCOM
文 赫标识码: A
中囤 分娄号: T 3 P
机器人与计算机之间的通信编程
王 宏杰 ,丁国清 , 颜 国正 , 良明 林
( 上海交通大学 电子信息学院信息橙测技术与仪器系 ,上海20 3 ) 0 0 0
摘 要 : 出 了一种基 于R C ( e oe r ue a) 网络通信机制 的机器^ 与 提 P Rm tP dc C l o 1 计算机之 问的通信编程方措 ,实现 了机器人基于as 模型 的分 布式 厨络控制系统模 型 , 井对R C . 内容进吁 T )O Dsi i o oet L cM d1封装 ,为机器 ^柔性 自动化系统的开发提供 了 P  ̄信 1 M(ir u d mpnnO ̄ t oe) O tb e C i e
利用LabVIEW进行机器人控制和编程
利用LabVIEW进行机器人控制和编程机器人控制和编程是现代科技领域的重要研究方向之一。
随着技术的不断进步,人们对机器人的需求越来越高,机器人在工业、医疗、军事等领域扮演着越来越重要的角色。
而LabVIEW作为一种强大的图形化编程语言和开发环境,提供了便捷而灵活的方式来实现机器人控制和编程。
本文将介绍如何利用LabVIEW进行机器人控制和编程。
1. 背景介绍随着机器人应用的广泛普及,人们对机器人的控制和编程需求越来越高。
传统的机器人控制和编程方式往往需要繁琐的代码编写和复杂的硬件连接,这给非专业人士带来了很大的困扰。
而LabVIEW通过其图形化编程的方式,简化了机器人控制和编程的流程,使得非专业人士也能轻松上手。
2. LabVIEW的特点LabVIEW是一种基于数据流编程的图形化编程语言,其主要特点如下:- 图形化界面:LabVIEW提供了直观、交互式的图形化界面,用户可以通过简单的拖拽和连接来构建程序,降低了学习和使用的难度。
- 多平台支持:LabVIEW支持在不同操作系统下运行,包括Windows、Mac和Linux等,适用于不同开发环境。
- 丰富的函数库:LabVIEW内置了大量的函数库,包括用于控制、传感器读取、通信等功能,方便用户进行开发。
- 与硬件的高度集成:LabVIEW提供了丰富的硬件支持,可以轻松与各种传感器、执行器和机器人平台进行集成。
3. LabVIEW在机器人控制和编程中的应用利用LabVIEW进行机器人控制和编程可以实现以下功能:- 传感器读取与数据处理:LabVIEW可以读取各种传感器的数据,并对数据进行处理和分析,例如机器人的视觉感知、距离测量等。
- 运动控制和路径规划:LabVIEW可以对机器人进行运动控制,包括轨迹规划、速度控制等,实现精确的运动控制。
- 人机交互界面设计:LabVIEW提供了丰富的用户界面设计工具,可以轻松设计人机交互界面,方便用户与机器人进行交互。
《机器人技术与应用》第6章 机器人编程语言
机械系统——执行机构 基 座 (固定或移动) 电驱动装置
驱动系统 气压驱动装置 液压驱动装置
控制系统
关节伺服控制器
感知系统
外部传感器
内部传感器
手部
2
腕部
臂部
腰部
处理器
机电工程学院
6.0 机器人语言概述 当前实用的工业机器人编程方法 ——直接示教和离线编程 直接示教的特点
它是目前大多数工业机器人的编程方式,用于示
14
机电工程学院
6.1 机器人编程要求与语言类型 2. 机器人编程语言的类型
(2)对象级编程语言
以描述操作物体之间的关系为中心的语言,即它是描述操作 物体间关系使机器人动作的语言,解决了动作级语言的不足,这 类语言有AML、AutoPass等。
对象级语言具有以下特点: 1)运动控制:具有与动作级语言类似的功能。 2)处理传感器信息:可以接受比开关信号复杂的传感器信号,并 可利用传感器信号进行控制、监督以及修改和更新环境模型。 3)通信和数字运算:能方便地和计算机的数据文件进行通信,数 字计算功能强,可以进行浮点计算。 4)具有很好的扩展性:用户可以根据实际需要,扩展语言的功能, 如增加指令等。
机器人技术与应用 第6章 机器人编程语言
机电工程学院
/
1
机电工程学院
6.0 机器人语言概述
机器人的主要特点之一是其通用性,使机器人具有可编程能力 是实现这一特点的重要手段。 机器人语言是使用符号来描述机器人动作的方法,是机器人运 动与控制的结合点,是实现人机通信的主要方法,是研究机器 人系统的最困难、最关键问题之一。 机器人编程系统的核心问题:操作运动控制问题。
每一个命令(指令)对应于一个动作。例如,可以定义机器人
Java的机器人控制实现智能机器人的编程
Java的机器人控制实现智能机器人的编程智能机器人是当今科技领域的热门话题,其应用范围涵盖了工业、医疗、家庭等多个领域。
而实现智能机器人的编程,Java语言提供了强大的支持和便捷的开发环境。
本文将介绍Java的机器人控制实现智能机器人编程的具体方法和步骤。
一、机器人控制器的选择在开始编程之前,我们首先需要选择适合的机器人控制器。
机器人控制器是连接计算机与机器人硬件的中间设备,负责接收指令并控制机器人的运动。
常见的机器人控制器有动态链接库(Dynamic Link Library, DLL)、串口通信、网络通信等方式。
在Java中,我们可以使用Java串口通信库或网络通信库来实现机器人控制。
二、串口通信方式1. 硬件准备:首先,我们需要准备一个支持串口通信的机器人和计算机。
确保机器人和计算机之间通过串口进行连接,并安装好机器人控制器的驱动程序。
2. 导入Java串口通信库:我们可以使用开源的Java串口通信库,比如RXTX或jSerialComm。
将库文件导入到Java项目中,并添加相应的依赖。
3. 打开串口:使用Java串口通信库提供的API,我们可以打开指定的串口,并设置相应的波特率、数据位、校验位等参数。
4. 发送指令:通过串口发送指令给机器人,以实现对机器人运动的控制。
可以根据机器人具体的控制协议进行指令的编写和发送。
5. 接收数据:机器人在执行完指令后,可能会返回一些反馈信息。
我们可以通过串口接收数据,并进行相应的处理和解析。
三、网络通信方式1. 硬件准备:与串口通信方式类似,我们需要准备一个支持网络通信的机器人和计算机。
确保机器人和计算机可以通过局域网或互联网进行连接。
2. 导入Java网络通信库:Java提供了丰富的网络编程API,我们只需要导入相应的库文件即可。
3. 建立连接:使用Java网络通信库提供的API,我们可以建立与机器人的网络连接。
根据机器人的IP地址和端口号,通过Socket或URLConnection等方式建立连接。
工业机器人的编程与操作方法

工业机器人的编程与操作方法工业机器人是一种高度自动化的设备,可以完成各种任务,如搬运、装配、焊接等。
为了使机器人能够准确、高效地完成任务,需要进行编程和操作。
本文将介绍工业机器人的编程和操作方法。
一、编程方法1. 离线编程:离线编程是在计算机上进行机器人程序的编写和模拟。
首先,需要使用专业的机器人软件,如ABB RobotStudio、KUKA Sim、Fanuc RJ3等。
然后,通过图形界面或编程语言来编写机器人程序。
离线编程可以在计算机上进行,无需将机器人放置在生产线上,节省了时间和资源。
完成程序编写后,可以通过模拟功能进行程序仿真,以确保程序的可行性和准确性。
2. 在线编程:在线编程是在实际生产环境中对机器人进行编程。
这种编程方法需要专业的编程设备和软件。
首先,需要连接计算机和机器人,并确保通信正常。
然后,使用机器人控制器上的编程语言或机器人操作界面进行编写。
在线编程可以实时修改和调试程序,但需要在现场进行,可能会受到实际环境的限制。
二、操作方法1. 手动操作:手动操作是指通过外部操作设备,如手柄或按钮,来操控机器人完成任务。
手动操作通常用于机器人的调试和测试阶段,可以在不编写复杂程序的情况下对机器人进行控制。
但手动操作的精度较低,只适用于简单、粗略的操作。
2. 自动操作:自动操作是指通过事先编写好的程序,使机器人按照预定的路径和动作来完成任务。
自动操作需要在编程阶段对机器人的动作进行规划和设定,确保机器人可以准确无误地完成任务。
自动操作可以提高生产效率和产品质量,减少人为错误。
三、编程语言1. 基于图形界面的编程语言:图形界面编程语言是一种以图形元件为基础的编程语言,如ABB RobotStudio的RobotWare、KUKA Sim的KRL等。
这些编程语言通过拖拽和连接图形元素来编写机器人程序,使编程变得更加直观和易于理解。
它们适用于初学者和非专业人员,但在处理复杂的逻辑和算法时可能有限。
工业机器人编程和调试教程
工业机器人编程和调试教程工业机器人的出现和广泛应用大大提高了生产力和生产效率。
为了使工业机器人能够正常工作,工程师们需要进行编程和调试。
本文将向您介绍工业机器人编程和调试的基本步骤和技巧,帮助您顺利完成任务。
一、准备工作在开始工业机器人编程和调试之前,我们需要准备一些必要的工具和资料。
首先,您需要了解所使用的机器人品牌和型号,并下载和安装相应的机器人编程软件。
其次,确保您具备一定的机器人基础知识,包括机器人组成部分、机器人运动轨迹等。
最后,准备好机器人的用户手册、技术规格和相关文档,以便查询和参考。
二、编程环境搭建在进行工业机器人编程之前,我们需要为机器人搭建一个适合的编程环境。
首先,确保机器人连接到电源并开启,然后连接机器人与计算机的通信线缆。
接下来,配置机器人编程软件,设置机器人的IP地址和端口号,确保计算机能够与机器人进行通信。
最后,根据机器人的运动轨迹和任务需求,设置工作区域和安全区域,确保机器人的运动范围和安全性。
三、编程和调试步骤1. 程序编写在进行工业机器人编程之前,我们需要先制定一个程序。
根据机器人的任务需求,确定机器人的运动轨迹、路径规划和执行顺序。
使用机器人编程软件,编写程序并进行调试。
程序的编写包括定义变量、设置运动方向和速度、配置传感器和执行器等。
2. 轨迹规划轨迹规划是指确定机器人的运动轨迹和路径。
根据机器人的工作空间和任务需求,选择合适的运动轨迹规划算法。
常用的轨迹规划算法包括线性插值、圆弧插值和样条插值等。
通过调整机器人的关节角度和位置,使其按照预设的轨迹规划进行运动。
3. 运动控制运动控制是实现机器人运动的关键步骤。
通过控制机器人的关节角度和速度,实现机器人的准确运动。
编程软件提供了不同的运动控制功能,如位置控制、速度控制和力控制等。
根据机器人的任务需求和工作空间,选择合适的运动控制方法。
4. 程序调试编程和调试是工业机器人开发过程中的重要环节。
在进行程序调试之前,我们需要先对程序进行模拟和验证。
2024版干货ABB机器人串口通信设定和程序编写

干货ABB机器人串口通信设定和程序编写•串口通信基础概念•ABB机器人串口通信设定•程序编写基础知识•ABB机器人程序编写实践目•调试与优化技巧分享•总结与展望录01串口通信基础概念串口通信定义及作用01串口通信是一种异步通信方式,用于实现设备之间的数据传输。
02串口通信在工业自动化、智能家居、汽车电子等领域有广泛应用。
03通过串口通信,可以实现机器人与外部设备的数据交换和控制。
常见串口类型及特点RS-232串口传输距离较远,但传输速率较低,常用于工业控制领域。
RS-422/485串口支持多点通信,传输距离和速率较高,适用于长距离、高速率的数据传输。
USB转串口通过USB接口实现串口通信,方便易用,广泛应用于各种领域。
串口通信协议简介01串口通信协议规定了数据传输的格式和规则。
02常见的串口通信协议有Modbus、Profibus、CAN等。
03在使用ABB机器人进行串口通信时,需要根据具体应用场景选择合适的通信协议。
通过串口通信,机器人可以与外部设备(如传感器、执行器等)进行数据交换和控制。
机器人与外部设备的通信多个机器人之间可以通过串口通信实现协同作业和数据共享。
机器人之间的通信通过串口通信,可以实现对机器人的远程监控和调试,提高维护效率。
远程监控与调试串口通信应用场景02ABB机器人串口通信设定硬件连接与配置选择合适的串口通信设备根据实际需求选择符合要求的串口通信设备,如RS232、RS485等。
连接机器人与串口通信设备使用串口线将机器人控制器与串口通信设备连接起来,并确保连接稳定可靠。
配置机器人串口参数在机器人控制器中设置相应的串口参数,如波特率、数据位、停止位、校验位等,以匹配串口通信设备的参数。
安装串口通信软件在机器人控制器中安装相应的串口通信软件,以便进行串口通信操作。
配置串口通信协议根据实际需求选择合适的串口通信协议,如Modbus、Profibus等,并进行相应的配置。
调整串口通信参数根据实际通信效果,对串口通信参数进行调整,如修改波特率、数据位等,以提高通信质量和稳定性。
abb机器人的硬件连接和io通信完整课件

abb机器人的硬件连接和io通信完整课件目录•机器人硬件连接概述•IO通信原理及协议•机器人硬件连接详解•IO通信实现方法•故障诊断与排除技巧•案例分析与实践操作演示01机器人硬件连接概述控制器电机与驱动器传感器执行器机器人硬件组成01020304机器人的“大脑”,负责处理各种传感器输入和执行器输出。
提供机器人运动所需的动力,驱动器将控制器的信号转换为电机可理解的指令。
感知机器人周围环境,将环境信息转换为电信号传递给控制器。
根据控制器指令执行特定动作或任务的装置,如机械臂、夹爪等。
通过电缆将各硬件组件连接起来,稳定可靠但灵活性较差。
有线连接无线连接接口类型采用蓝牙、Wi-Fi 等无线通信技术,提高灵活性但可能增加信号干扰和延迟。
包括USB 、Ethernet 、CAN 等,不同接口适用于不同通信需求和场景。
030201连接方式及接口硬件配置与选型01根据机器人应用场景和需求选择合适的控制器、电机、传感器和执行器等硬件。
02考虑硬件之间的兼容性和通信协议,确保各组件能够协同工作。
03对于特殊需求,可能需要定制或改造现有硬件以满足特定功能或性能要求。
02IO通信原理及协议IO通信基本概念输入/输出(I/O)通信指机器人与外部设备之间的数据传输,包括数字信号和模拟信号的传输。
通信接口机器人与外部设备连接的物理接口,如RS232、RS485、Ethernet等。
通信协议规定机器人与外部设备之间数据传输的格式和规则。
一种串行通信协议,广泛应用于工业自动化领域,支持多种物理接口。
Modbus 协议Profinet 协议EtherCAT 协议OPC UA 协议一种基于Ethernet 的工业自动化通信协议,具有高带宽、实时性强的特点。
一种实时以太网通信协议,具有高精度同步和低延迟特性,适用于高性能机器人控制。
一种跨平台的工业自动化通信协议,支持信息建模和统一架构,适用于复杂系统的集成。
常见IO 通信协议根据实际需求选择合适的通信协议,考虑因素包括传输速度、实时性、可靠性、兼容性等。
工业机器人与PLC通信实战教程

工业机器人与PLC通信实战教程引言工业机器人和PLC(可编程逻辑控制器)是现代工业自动化的重要组成部分。
它们通常被用于实现生产线的自动化和信息交换。
本文将介绍工业机器人与PLC之间的通信技术以及实战教程,帮助读者了解并应用这些技术。
工业机器人与PLC的通信方式工业机器人与PLC之间的通信可以通过多种方式实现,包括有线通信和无线通信。
常用的有线通信方式包括以太网、RS-485和RS-232等,而无线通信方式则包括Wi-Fi、蓝牙和Zigbee等。
不同的通信方式适用于不同的场景和需求。
在实际应用中,我们需要根据具体情况选择合适的通信方式。
以太网通信实战教程以太网是工业机器人与PLC之间最常用的通信方式之一。
下面将介绍一种以太网通信实战教程。
首先,我们需要确保工业机器人和PLC连接到同一个以太网网络中。
可以通过交换机或路由器实现它们之间的网络连接。
步骤二:配置IP地址在工业机器人和PLC上分别配置IP地址。
我们需要确保它们的IP地址在同一个子网中,确保能够相互通信。
步骤三:配置通信协议选择合适的以太网通信协议,常见的有Modbus、OPC UA和Ethernet/IP等。
根据具体的协议规范进行配置。
步骤四:实现通信根据通信协议的规范,编写相应的代码或配置工具,实现工业机器人和PLC之间的通信。
常见的通信方式包括读取和写入数据寄存器、发送和接收消息等。
RS-485通信实战教程RS-485是一种简单而可靠的工业机器人与PLC通信方式。
下面将介绍一种RS-485通信实战教程。
使用RS-485通信所需的硬件包括RS-485转换器、串口线和电缆等。
首先,将RS-485转换器连接到工业机器人和PLC 的串口上。
步骤二:配置通信参数在工业机器人和PLC上设置RS-485通信的参数,包括串口波特率、数据位、停止位和校验位等。
步骤三:实现通信根据RS-485通信协议的规范,编写代码或使用相应配置工具,实现工业机器人和PLC之间的通信。
工业机器人与可编程控制器(西门子PLC)的通讯
工业机器人与可编程控制器(西门子PLC)的通讯工业机器人是现代制造业中的重要设备,主要用于自动化生产过程中的操作、装配、搬运和包装等环节。
而可编程控制器(PLC)是现代自动化控制系统的核心部件,通过它可以实现对设备和工艺的精细控制和管理。
在现代工业生产过程中,工业机器人和PLC通常需要进行通讯,以实现精细控制和交互信息。
下面将介绍工业机器人与西门子PLC的通讯方法和流程。
1、硬件连接:工业机器人和PLC之间通常采用以太网或串口连接方式进行通讯。
以太网通讯方式速度快,数据传输稳定,通讯距离远,支持多连接。
串口通讯方式连接简单,通讯速率较慢,但距离短。
2、通讯协议:根据不同的工业机器人和PLC品牌,需要对应相应的通讯协议进行通讯。
目前较为流行的协议有西门子S7通讯协议、Modbus协议、Profibus协议、Ethernet/IP协议等。
3、通讯方式:PLC与工业机器人之间的通讯方式通常包括主从方式和点对点方式。
主从方式是指PLC作为主机,在通讯过程中发起通讯请求,工业机器人作为从机,接受请求并返回数据。
这种通讯方式适用于对工业机器人进行指令控制和数据采集。
点对点方式是指PLC与工业机器人之间的通讯是平等的,两者可以相互发送数据和指令。
这种通讯方式更加灵活,数据传输速度快,在工业机器人任务调度和性能优化方面更加方便。
1、PLC与工业机器人连接需要先确定PLC和工业机器人之间的连接方式和通讯协议,设置好通讯参数和硬件连接。
一般需要根据具体情况进行调试和测试。
在主从式通讯模式下,PLC会向工业机器人发送读取数据请求,工业机器人在接受到请求后会将数据发送至PLC。
在点对点通讯模式下,PLC可以主动向工业机器人发送数据请求,也可以接收工业机器人发送的数据。
在每次数据收发后需要对数据进行处理和解析,以便PLC能够正确地控制工业机器人。
在点对点通讯模式下,PLC和工业机器人之间可以建立一个工作协议,在协议中规定指令的格式和执行方式。
工业机器人与plc的通信配置流程

工业机器人与plc的通信配置流程下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by theeditor.I hope that after you download them,they can help yousolve practical problems. The document can be customized andmodified after downloading,please adjust and use it according toactual needs, thank you!In addition, our shop provides you with various types ofpractical materials,such as educational essays, diaryappreciation,sentence excerpts,ancient poems,classic articles,topic composition,work summary,word parsing,copy excerpts,other materials and so on,want to know different data formats andwriting methods,please pay attention!工业机器人与PLC的通信配置流程详解在现代工业生产中,工业机器人和可编程逻辑控制器(PLC)的协同工作已经成为自动化生产线的重要组成部分。
EPSON机器人与上位机TCP通信
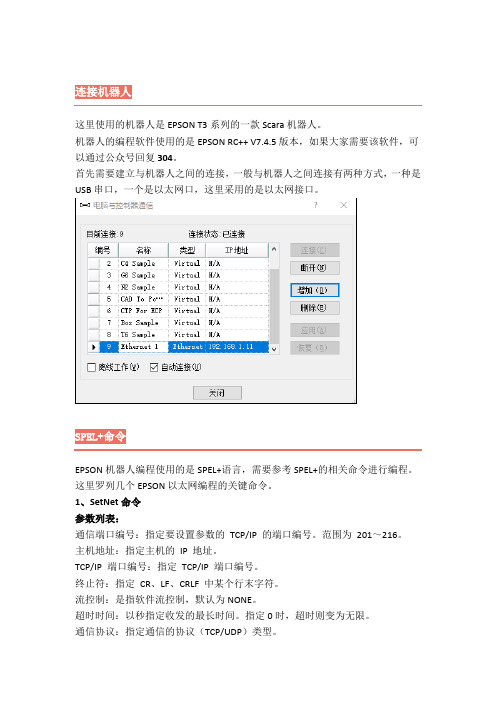
这里使用的机器人是EPSON T3系列的一款Scara机器人。
机器人的编程软件使用的是EPSON RC++ V7.4.5版本,如果大家需要该软件,可以通过公众号回复304。
首先需要建立与机器人之间的连接,一般与机器人之间连接有两种方式,一种是USB串口,一个是以太网口,这里采用的是以太网接口。
SPEL+命令EPSON机器人编程使用的是SPEL+语言,需要参考SPEL+的相关命令进行编程。
这里罗列几个EPSON以太网编程的关键命令。
1、SetNet命令参数列表:通信端口编号:指定要设置参数的TCP/IP 的端口编号。
范围为201~216。
主机地址:指定主机的IP 地址。
TCP/IP 端口编号:指定TCP/IP 端口编号。
终止符:指定CR、LF、CRLF 中某个行末字符。
流控制:是指软件流控制,默认为NONE。
超时时间:以秒指定收发的最长时间。
指定0时,超时则变为无限。
通信协议:指定通信的协议(TCP/UDP)类型。
使用示例:SetNet #201, "192.168.0.1", 2001, CRLF, NONE, 02、OpenNet命令格式:OpenNet #端口编号As Client/Server参数列表:端口编号:指定要打开的TCP/IP 端口编号的整数值。
端口编号的范围为201~216。
使用示例:Function tcpipString data$OpenNet #201 As ClientWaitNet #201Input #201, data$Print "received '", data$, "' from host 1"Fend3、ChkNet命令格式:ChkNet (通信端口编号)参数列表:通信端口编号:指定TCP/IP 端口编号(201~216)。
返回值返回接收字符数(整数值)。
如果不存在接收数据,以下负值返回端口状态。
ABB工业机器人编程-第四章

X3端子见表4-3
© ABB April 28, 2019
| Slide 9
4.2. ABB标准IO板卡介绍
4.2.1 ABB标准I/O板 DSQC651
X5 端子编号 1 2 3 4 5
表4-4
使用定义 0V BLACK(黑色) CAN信号线low BLUE(蓝色) 屏蔽线 CAN信号线high WHITE(白色) 24V RED(红色) GND 地址选择公共端 模块ID bit 0 (LSB) 模块ID bit 1 (LSB) 模块ID bit 2 (LSB) 模块ID bit 3 (LSB) 模块ID bit 4 (LSB) 模块ID bit 5 (LSB)
© ABB April 28, 2019
| Slide 2
第四章 ABB机器人通讯
4.1.ABB机器人通讯介绍
ABB机器人I/O通讯的种类
ABB机器人提供了丰富I/O通讯接口,如ABB的标准通讯,与PLC的现场总线通
讯,还有与PC机的数据通讯,如图,可以轻松地实现与周边设备的通信
ABB的标准I/O板提供的常用信号处理有数字量输入,数字量输出,组输入,组
工业通讯总线接口(选件), 只支持从站功能如: Devicenet、Profibus、 Profinet、EtherNet IP等
Key:使用 何种现场 总线,要 根据需要 进行选配
© ABB April 28, 2019
| Slide 5
第四章 ABB机器人通讯
4.1.ABB机器人通讯介绍
Key:
表4-8
使用定义 INPUT CH9 INPUT CH10 INPUT CH11 INPUT CH12 INPUT CH13 INPUT CH14 INPUT CH15 INPUT CH16 0V 未使用 地址分配 8 9 10 11 12 13 14 15
工业机器人与可编程控制器(西门子PLC)的通讯
工业机器人与可编程控制器(西门子PLC)的通讯随着工业自动化技术的发展,工业机器人在生产线上扮演着越来越重要的角色。
而作为工业自动化系统的关键组成部分之一,可编程控制器(PLC)也在控制和监控工业机器人的运行中发挥着至关重要的作用。
工业机器人与PLC之间的通讯问题成为了自动化行业中的一个热点话题。
本文将就工业机器人与西门子PLC之间的通讯进行探讨,以及如何实现二者之间的高效稳定的通讯。
在工业自动化行业中,西门子PLC是一个非常知名的品牌,其在自动化控制领域有着非常丰富的经验和成熟的控制技术。
而工业机器人也有不同的品牌和型号,其中包括ABB、克番、发那科等。
这些工业机器人通常都具备各自的通讯接口和通讯协议。
要实现工业机器人与西门子PLC之间的通讯,需要采用合适的通讯方式和协议。
一般来说,西门子PLC与工业机器人之间的通讯方式主要有以下几种:1. 以太网通讯2. 串口通讯3. Profibus通讯4. Profinet通讯以太网通讯是目前较为流行的通讯方式之一,其具有高速、稳定的特点,可以满足工业机器人实时控制和数据传输的要求。
而串口通讯则是传统的通讯方式,虽然速度较慢,但其稳定性好,使用也较为方便。
而Profibus和Profinet是由西门子公司开发的两种通讯协议,可以实现不同品牌的设备之间的通讯。
对于工业机器人与西门子PLC之间的通讯,可以根据具体的实际情况选择合适的通讯方式和协议。
1. 选择合适的通讯方式和协议首先要根据具体的应用场景和设备要求,选择合适的通讯方式和协议。
对于有较高实时性和数据传输速度要求的应用场景,可以选择以太网通讯;而对于一些对实时性要求不太高但需要稳定性的控制场景,可以选择串口通讯。
要根据具体的设备来选择合适的通讯协议,以实现设备之间的兼容和互联。
2. 配置合适的通讯参数在实施工业机器人与PLC通讯时,需要正确配置通讯参数,包括设备的IP地址、端口号、通讯速率等。
这些参数的设置直接影响着通讯的稳定性和数据传输的可靠性,因此需要仔细调整和配置,确保通讯的正常运行。
工业机器人与可编程控制器(西门子PLC)的通讯
工业机器人与可编程控制器(西门子PLC)的通讯工业机器人与可编程控制器(PLC)的通信是现代工业自动化中非常重要的一个环节。
机器人一般用于完成重复性强、工作量大、对工件精度要求高、不适合人工操作的作业任务,而PLC作为工业控制系统的核心,负责对工业设备进行控制和监控。
在工业机器人与PLC的通信中,主要有以下几种通信方式:1. 以太网通信:以太网是一种常见的工业通信方式,可支持高速数据传输。
在机器人和PLC之间建立以太网通信连接后,可以通过以太网协议进行数据的传输和交换,实现两者之间的实时通信。
2. 串行通信:串行通信是一种较为简单和常见的通信方式,适合于数据量较小的通信。
通过串行通信,机器人和PLC可以进行数据的传输和交换,包括控制指令、状态信息等。
3. 字段总线通信:字段总线通信是一种更加高级且灵活的通信方式,适合于复杂的工业自动化系统。
通过字段总线通信,机器人和PLC可以进行实时数据交换和共享,提高工业生产的效率和自动化水平。
1. 控制指令传输:PLC作为控制器,负责对机器人进行控制。
通过与PLC进行通信,机器人可以接收到PLC发送的控制指令,实现对其运动、操作等方面的控制。
2. 状态信息传输:机器人在工作过程中会生成各种状态信息,如位置、速度、力等。
通过与PLC进行通信,机器人可以将这些状态信息实时传输给PLC,以便PLC进行监控和控制。
3. 故障诊断和报警:机器人在工作过程中可能会出现各种故障和异常情况,如机械故障、电气故障等。
通过与PLC进行通信,机器人可以将故障信息传输给PLC,PLC则可以进行故障诊断和报警,提高故障处理的效率和准确性。
4. 数据共享和交互:在某些工业生产过程中,机器人和PLC需要共同完成一些复杂的任务。
通过通信,机器人和PLC可以实现数据的共享和交互,使二者之间更好地协同工作。
工业机器人与PLC的通信是实现工业自动化的重要环节,它能够提高生产效率、减少人工操作、提高生产质量,进一步推动工业生产的现代化进程。
工业机器人与可编程控制器(西门子PLC)的通讯

工业机器人与可编程控制器(西门子PLC)的通讯
工业机器人与可编程控制器(西门子PLC)的通讯是指在生产过程中,将机器人与PLC 进行数据交互和命令传输的过程。
这种通讯可以实现机器人与PLC之间的协作工作,提高生产效率和自动化水平。
在工业生产中,机器人通常作为生产线中的一员,负责完成指定的任务,而PLC则负责控制整个生产线的运行。
机器人与PLC之间的通讯可以实现双向数据传输,包括机器人接收到的工艺参数和命令,以及机器人传输给PLC的反馈信息和报警信息。
通常情况下,机器人与PLC的通讯主要通过以下几种方式来实现:
1. 数字IO通讯:通过数字输入输出口(DI/DO)来实现机器人与PLC之间的数字信号传输。
机器人可以将需要传输的信息转换成数字信号,通过DI口输入到PLC中,PLC再根据接收到的信号进行相应的控制和处理。
同样地,PLC也可以通过DO口向机器人发送数字信号,控制机器人的运动和动作。
3. 通信协议通讯:机器人与PLC之间还可以通过通信协议进行数据交互和命令传输。
常见的通信协议包括RS485、RS232、CAN等。
通过这些通信协议,机器人与PLC可以进行数据的高速传输和实时控制,实现更加灵活和精确的生产过程。
机器人与PLC的通讯在实际应用中有着广泛的应用。
在汽车制造行业中,机器人可以进行焊接、喷涂、装配等工作,而PLC可以控制机器人的运动轨迹和工艺参数,实现自动化生产。
在电子制造行业中,机器人可以进行元件的搬运和组装,而PLC可以控制机器人的速度和力度,确保生产的质量和稳定性。
机器人与PLC的通讯还可以应用于食品加工、物流仓储、医药制造等行业,提高生产效率和经济效益。
abb机器人通信连接讲解

abb机器人通信连接讲解ABB 机器人的通信连接通常涉及到与控制器、外部设备以及其他系统的数据交互。
ABB 机器人常用的通信方式包括:RobotWare 网络通信:ABB 机器人的控制器上运行着RobotWare 软件,该软件支持多种网络通信协议,如Ethernet/IP、Profinet、Modbus TCP 等。
这使得机器人可以与其他设备和系统通过网络进行数据交换。
Fieldbus 通信:ABB 机器人支持常见的工业现场总线通信协议,如Profibus、DeviceNet、EtherCAT 等。
这些通信协议允许机器人与其他设备,如PLC、传感器、控制系统等进行实时的数据交互。
IO 接口:ABB 机器人的控制器上配备了数字输入输出(IO)接口,用于连接传感器、执行器等外部设备。
通过配置IO 接口,机器人可以与周边设备进行基本的数字和模拟信号的传递。
PC 连接:通过使用RobotStudio 等工具,你可以将个人计算机(PC)连接到ABB 机器人进行编程、模拟和监控。
通常使用Ethernet 连接。
工业以太网:ABB 机器人支持通过工业以太网进行通信,这允许机器人集成到工业网络中,与其他设备进行数据交换,如MES (Manufacturing Execution System)、ERP(Enterprise Resource Planning)等。
外部编程设备:除了通过机器人自身的Teach Pendant 进行编程外,ABB 机器人还可以通过外部编程设备,如PC 上的RobotStudio 软件,进行更复杂的编程、模拟和调试。
具体的连接方式和通信协议取决于具体的ABB 机器人型号、控制器版本以及与之连接的设备。
在使用前,建议参考相关的ABB 机器人用户手册、技术规格和编程手册,以获取详细的通信连接讲解。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
近年来,以离线编程为基础的机器人柔性自动化系统的开发,代表了工业机器人系统二次开发的热点。
离线编程作为机器人系统开发的核心技术,要求外部计算机直接与机器人控制器通信。
而机器人控制器作为机器人控制系统的本体,不但完成操作手的伺服控制、轨迹规划,同时它还具有与外界控制系统进行通信的功能。
随着网络通信技术对控制系统的革新,开发基于网络,具有开放式、分布式机器人控制系统已成为机器人控制器研究的重点;另一方面,机器人控制系统结构沿着网络化、分布式方向和控制系统体系沿着开放性方向发展是机器人控制系统技术创新的趋势。
C/S
本文提出了基于模型机器人控制器与计算机之间的
Win NT RPC
通信编程方法,着重讨论了基于操作系统机制的机器人控制网络客户服务器程序的开发,并实现了其软件DCOM C/S ABB S4
的封装。
并以基于模型的型机器人控制器
RPC Win NT Win32 为例,阐明了基于机制的操作系统下的
机器人柔性自动化应用程序的开发,为机器人柔性自动化系统的开发提供了一种可行的新方法。
1 C/S
基于模型的机器人控制器原理
计算机、机器人计算机板、内存板和网络输入输出接口板
/等大部分组成。
主计算机由和用于控制和协调各接口4RAM 板的主计算机系统组成,它是机器人控制系统的核心,负责协调和控制各标准扩展槽,完成任务调度和协作;机器人计
算机板由操作手控制计算机和输入输出控制计算机组成,
/操作手控制计算机主要控制操作手各轴的伺服控制及运动轨迹规划控制,输入输出计算机管理机器人控制器的数字和/模拟输入输出信号,同时提供机器人操作界面,如机器人/的示教器和显示面板等功能。
内存板的作用是作为机器人控制器的电子硬盘,主要存储机器人控制器的操作系统文件及各驱动程序。
网络输入输出接口板由卡及其处理计/Ethernet 算机组成,主要实现基于协议的计算机与客户计算
TCP/IP 机之间的通信硬件。
本文以型机器人系统为例,阐明基于网络ABB S4RPC 通信机制的机器人与计算机之间的通信。
最新型控ABB S4制器
6统,支持协议下的通信,并采用机器人编程TCP/IP Ethernet 语言进行机器人的编程,以程序控制机器人末端执RAPAID 行器的轨迹。
基于网络通信机制的机器人控制器与计算机2 RPC 之间的通信编程
基于模型的机器人控制器与外部计算机之间的通信C/S 软件可以如下描述:服务器运行服务器端程序,响应并执行来自客户端的服务请求,最后向客户端返回计算结果;而客户机运行客户端程序,向服务器发出请求,获得服务器响应。
型机器人控制系统的软件结构如图所示,由机ABB S43器人多任务操作系统和基于该操作系统的机器BaseWare OS 人程序和服务器程序等组成。
由于机器人的运动RAPID RPC 和操作只受机器人程序控制,要实现机器人在线控制,必须与机器人程序进行实时数据通信,而服务器程序RAPID RPC 可以跨越进程与操作系统或机器人程序进行数据通信,从而获得机器人系统和机器人程序的状态和数据变量。
外RAPID 部计算机运行客户端程序,通过向机器人控制器发出请RPC 求,并实时响应机器人控制器上的服务器程序的答复的RPC 方法进行数据通信。
由于外部计算机采用多任Windows NT 务操作系统,型材机器人柔性自动化程序同样可跨越进程与客户端程序进行数据交换,实时取得机器人系统和机器RPC 人程序的状态和数据变量。
因此通过上述机器人与计RAPID 算机之间的网络编程,实现了计算机应用程序与机器Win 32人控制器及机器人程序之间的实时数据通信。
RAPID 基于机器人控制器和外部计算机客户服务器通信程 C/S 序的开发是同时进行的,本文采用基于开放性软件的DEC 远程过程调用机制的通信原理来实现两者之间的通RPC(信。
是指通过提供类似跨越网络的调用机制,在概念上RPC 扩充了函数或子程序的调用,服务器可以提供一组可由RPC 客户程序调用的函数。
如图显示了机器人控制器与RPC 4( a外部计算机之间的基于通信机制的通信原理。
服务RPC RPC 器后端运行服务器程序,客户端运行客户端程序,当RPC 客户程序调用函数时,它发出常规的函数调用,不RPC RPC 过接受这个调用的是存根函数,存根函数把函数转
RPC 图计算机应用程序与机器人程序数据通信原理
3 Win32 RAPID 图基于机器人控制器与计算机之间的通信原理及软件设计
4 RPC 化为调用请求和变元以进行网络传输,这一过程被称为信号编集,并把调用请求和变元发送给服务器。
(marshaling 服务器上的存根函数接收到函数变元,并进行逆信号编RPC 集,并调用该函数的服务器实现,当函数返回(unmarshal时,它的值用逆向机制传给客户服务程序。
故开发应用RPC 程序时,一个重要的要素就是接口,即服务器端和客户端都必须基于完全相同的存根函数的定义之上,否则进程肯RPC 定失败。
存根函数的定义则利用编译器实现,如图MIDL 4 所示,表示机器人控制器,表示
(bRobot_Sever Robot_Client 客户计算机。
首先开发服务器和客户端的存根函数,即定义和,再用编译器产生包含在服务Robot.IDL Robot.ACF MIDL 器和客户端应用程序中的头文件和两个实现客户与服务器的存根函数的语言源文件。
这些文件必须与服务器和客户程C 序相链接,最后产生服务器和客户端的应用程序代码。
和是程序开发的接口定义语言文
Robot.IDL Robot.ACF RPC 件和应用程序配置文件(Interface Definition Language File 基础,接口定义语言文件首 (Application Configuration File先定义了接口属性,保证了GUID (Globally Unique Identifier 服务器和客户端的应用程序具有全球唯一的标识符,还定义了用于存根函数的函数原型,即头文件。
应用程序配置文件则定义了一些与实际数据传输无关的数据与属性的信RPC 息。
综上所述,基于网络通信机制的模型机器人控RPC C/S 制器与计算机的客户服务器实现了以机器人控制器为服务器,外部计算机为客户机的网络通信。
由于网络结构和C/S 协议的特性,实现了网络技术与控制技术的结合,TCP/IP 构筑了机器人分布式控制网络,把机器人作为一种标准的工业控制设备,以网络为媒介进行无缝连接,并进行它们之间的底层通信,实现了机器人柔性自动化系统的开发。
同时为了实现外部计算机机器人柔性自动化程序的开发,作者利用下转第页
(171
—52—
(a(b
时,将各种可能按顺序显示给用户,将频率最高的转移作为默认情况。
当然,实际应用时需引入更复杂的排序方法,并嵌入到的各个状态中。
如最近最大相关加权法、决策GTN 树法或考虑到先前情况的预测方法等。
Token 在自动执行方面,该可以根据一定的规则进行自Agent 动补全。
如状态时,可直接输出,其它有多个可4subject to 能的情况,可确定一可能性阈值,若某个转移分枝的概率超过它就自动按该分枝补全,否则该将动态构造提示界Agent 面,按可能顺序列出,引导用户作出选择。
Token 结束语
4 本文总结了目前中人机交互存在的困难,提出应用DSS 思想构造智能界面,尝试了根据构造智能用户界Agent GTN 面的方法,并结合建模的实例作了说明,它可以应用在多种形式的人机界面中。
但存在需进一步研究的问题,如各的关系、规模的增长带来的效率问题等。
GTN GTN 参考文献
肖人彬,罗云峰,费奇决策支持系统发展的新阶段系统工程理1 .
.论与实践, 1999,19(1: 47-50
2 Shoham Y. Agent-oriented Programming. Artificial Intelligence,1993, 60:51-92
3 Jennings N R.On Agent-based Software Engineering.Artificial Intelli-
gence,2000,117:277-296
4 Bui T,Lee J.An Agent-based Framework for Building Decision Support System.Decision Support Systems,1999,25:225-237刘金琨王树青基于技术的人机智能决策支持系统研究系统
5 ,.Agent . 工程理论与实践 ,2000,20(2:15-20
6 Lewis M. Designing for Human-agent Interaction.AI Magazine,1998: 67-78
7 Schlimmer J C,Hermens L A. Software Agents: Completing Patterns and Constructing User Interfaces. Journal of Artificial Intelligence Research,1993,1:61-89
等离子切割枪
船用型材
ABB 机器人
S4型控制器
★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★。