起重臂伸缩机构原理的研究
汽车起重机吊臂结构与伸缩原理

汽车起重机吊臂结构与伸缩原理汽车起重机吊臂结构主要有固定吊臂和伸缩吊臂两种类型。
固定吊臂是最常见的吊臂结构,其长度固定不变,无法进行伸缩。
伸缩吊臂则可以根据需求进行伸缩操作,适用于更大范围的作业。
无论是固定吊臂还是伸缩吊臂,它们都有一套相似的结构,主要包括基座、动臂、起重臂和配重块。
首先是基座,它是起重机吊臂的主要支撑部分,可以固定在汽车底盘上。
基座通常由上方和下方两部分构成,上方是一个回转机构,通过液压系统控制吊臂的旋转;下方是一个液压机构,用于调整吊臂的倾角和高度,以满足不同工作的要求。
接下来是动臂,它是吊臂的起始部分,与基座相连接。
动臂一般较短,用于提升和转动起重臂。
然后是起重臂,它是吊臂的重要部分。
起重臂主要承担起重和搬运重物的作用,其长度和形状不同,可以适应不同种类和重量的货物。
起重臂一般由多个折叠节段组成,这些节段可以通过液压缸伸缩或折叠,以实现吊臂的伸缩操作。
最后是配重块,它是起重机吊臂的重要组成部分,用于平衡起重臂的重力和提升重物时产生的力矩。
配重块通常位于起重臂的尾部,可以根据工作需求增减数量,以达到平衡和稳定的状态。
伸缩吊臂相较于固定吊臂,具有更大的灵活性和适应性。
伸缩吊臂通过液压缸控制伸缩节段的伸缩,从而改变吊臂的长度,以适应不同距离的起重作业。
伸缩吊臂可以灵活伸展,能够实现大范围内的水平和垂直移动,提高吊装能力和作业效率。
总结起来,汽车起重机的吊臂主要包括固定吊臂和伸缩吊臂。
吊臂由基座、动臂、起重臂和配重块组成,其中起重臂可以通过液压缸的伸缩控制长度的变化。
伸缩吊臂具有更大的灵活性和适应性,能够提高起重机的作业范围和效率。
汽车起重机吊臂伸缩原理

汽车起重机吊臂伸缩原理你有没有好奇过汽车起重机那长长的吊臂是怎么伸缩自如的呀?今天呀,咱就来好好唠唠这个超有趣的事儿。
咱先来说说汽车起重机吊臂的基本构造。
你看啊,吊臂就像是一个超级神奇的变形金刚手臂。
它可不是简单的一根大铁杆子哦。
它是由好几节组成的,就像那种可以一节一节拉长的望远镜似的。
每一节呢,都有它自己的小秘密。
最里面的那一节是基础,就像大树的树干一样,稳稳地待在那儿。
其他的节就像树枝一样,可以沿着这树干伸出去或者缩回来。
这每一节的连接呀,可都是很有讲究的呢。
那它到底是怎么伸缩的呢?这里面就涉及到一个超酷的机械原理啦。
在吊臂里面呢,有一些叫做伸缩油缸的东西。
这个伸缩油缸呀,就像是一个大力士的肌肉一样。
当要把吊臂伸出去的时候,这个伸缩油缸就开始工作啦。
它会像打气筒一样,把里面的油给推出去,然后通过一些巧妙的装置,把力量传递到下一节吊臂上。
这个力量就会让下一节吊臂慢慢地沿着上一节吊臂的轨道滑出去。
你可以想象成是火车沿着铁轨缓缓前行的样子,只不过这个是在吊臂里面,而且是一节推动一节往外走。
而且哦,为了让这个伸缩的过程特别平稳,不会突然就冲出去或者卡住,还有好多小零件在帮忙呢。
比如说有一些滑块呀,它们就像是小小的保镖一样,在每一节吊臂的连接处,保证它们滑动得顺顺当当的。
如果没有这些滑块,那吊臂伸缩的时候可能就会像个调皮捣蛋的孩子,东倒西歪的,那可就危险啦。
再说说把吊臂缩回来的时候吧。
这时候伸缩油缸就像是一个温柔的大力士啦。
它会把外面那节吊臂慢慢地拉回来。
这个过程也不是简单粗暴的哦,也是要通过那些巧妙的装置,一点一点地把吊臂给拉回来。
就好像是把伸出去的手慢慢地收回来一样,得小心翼翼的。
你可能会想,这吊臂伸缩就这么简单呀?其实呀,这里面还有很多复杂的安全装置呢。
比如说,要是在吊臂伸出去或者缩回来的过程中,突然遇到了很大的阻力,就像有个大石头挡住了一样,这时候就有一些感应装置会察觉到。
然后呢,它就会告诉整个起重机的控制系统,控制系统就会让伸缩油缸停下来,防止把吊臂或者其他零件给弄坏了。
起重机伸缩臂的结构原理
起重机伸缩臂的结构原理起重机是利用吊臂顶端的滑轮组支承卷扬钢丝绳悬挂重物,利用吊臂的长度和倾角的变化改变起升高度和工作半径,汽车起重机的吊臂是起重机最重要的部分。
虽然吊臂的作用都是悬挂和搬运物体,但是不同的吊臂结构和技术,使起重机的性能和效率有很大的不同。
汽车起重机的吊臂一般包括主臂和副臂两部分。
主吊臂主要有两种类型,一种是由型材和管材焊接而成的桁架结构吊臂,一种是有各种断面的箱型结构吊臂。
随着汽车起重机的发展,现在大部分的汽车起重机主吊臂都是箱型结构,只有少部分是桁架结构。
副臂的作用是,当主臂的高度不能满足需要时,可以在主臂的末端连接副臂,达到往高处提升物体的目的。
副臂只能提升较轻的物体。
副臂一般只有一节臂,也有两节以上的折叠式副臂或伸缩式副臂,其中以折叠式的桁架结构副臂最为常见。
汽车起重机的吊臂伸缩形式有以下几种:1、顺序伸缩机构–伸缩臂的各节臂以一定的先后次序逐节伸缩。
2、同步伸缩机构–伸缩臂的各节臂以相同的相对速度进行伸缩。
3、独立伸缩机构–各节臂能独立进行伸缩的机构。
4、组合伸缩机构–当伸缩臂超过三节时,可以同时采用上列的任意两种伸缩方式进行伸缩的机构。
无销全液压伸缩机构的优点是臂长变化容易,工作臂长种类多,实用性很强。
缺点是自重大,对整机稳定性的影响较大。
无销全液压伸缩机构有不同的组合形式,可以是多液压缸加一级绳排,可以是单液压缸或多液压缸加两级绳排。
多液压缸加一级绳排的特点是最末一节伸缩臂采用钢丝绳伸缩,其它伸缩臂采用多级缸或多个单级缸或多级缸和单级缸套用等方式直接用油缸伸缩。
因而最末伸缩臂的截面变化较大,其它臂节截面的变化较小。
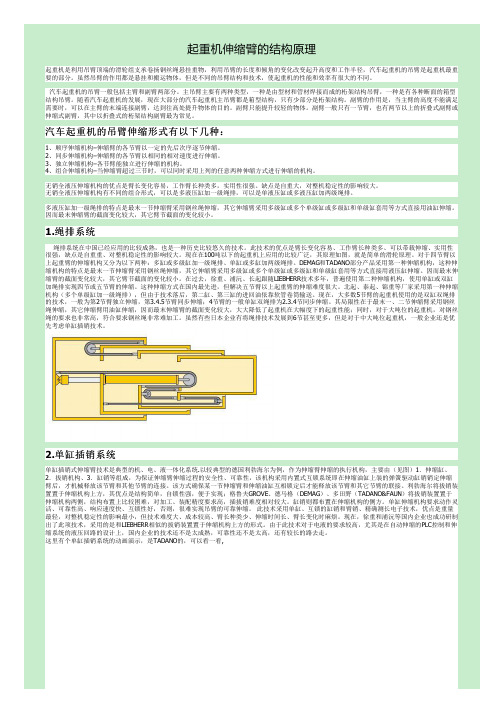
1.绳排系统绳排系统在中国已经应用的比较成熟,也是一种历史比较悠久的技术。
此技术的优点是臂长变化容易、工作臂长种类多、可以带载伸缩、实用性很强,缺点是自重重、对整机稳定性的影响较大。
现在在100吨以下的起重机上应用的比较广泛,其原理如图,就是简单的滑轮原理。
汽车起重机伸缩臂结构有限元分析及优化

汽车起重机伸缩臂结构有限元分析及优化汽车起重机伸缩臂结构有限元分析及优化引言:汽车起重机作为一种重要的工程机械设备,在建筑、物流等行业中起着重要的作用。
而在汽车起重机的设计中,伸缩臂结构是其关键组成部分之一。
伸缩臂结构的合理设计和优化可以提高汽车起重机的工作效率和承载能力,降低其重量和成本。
因此,对汽车起重机伸缩臂结构进行有限元分析与优化具有重要的理论意义和实际应用价值。
1. 伸缩臂结构的设计和工作原理汽车起重机的伸缩臂结构由伸缩臂筒、伸缩臂滑块、伸缩臂大臂、伸缩臂小臂等组成。
其工作原理是通过液压系统控制伸缩臂筒的伸缩,从而实现伸缩臂的变化和起重高度的调节。
伸缩臂结构的设计直接影响汽车起重机的工作性能和稳定性。
2. 有限元分析的原理和方法有限元分析是一种数值分析方法,通过将结构离散化为有限个小元素,利用数学和力学原理对每个小元素进行计算,最后得到整个结构的应力、应变、位移等相关信息。
有限元分析方法可以精确计算伸缩臂结构在不同工况下的受力情况,为优化设计提供基础。
3. 初始结构的有限元分析首先,采用有限元分析方法对汽车起重机初始伸缩臂结构进行分析。
通过初始结构的有限元模型建立和边界条件的设定,计算得到伸缩臂结构在不同工况下的受力情况,包括应力、应变、变形等参数。
利用有限元分析结果,可以评估初始结构的工作性能,并确定需要改进的方向。
4. 结构优化设计与分析基于初始结构的有限元分析结果,可以进行伸缩臂结构的优化设计。
结构优化的目标是提高结构的工作效率和承载能力,降低结构的重量和成本。
通过在有限元模型中进行参数化设计和分析,可以获得不同设计方案下的结构性能指标。
综合考虑结构的强度、刚度、轻量化等因素,选择最优设计方案。
5. 优化设计的验证与验证对优化设计方案进行验证与评估是优化过程的重要环节。
通过将优化设计方案转化为实际工艺制造过程中的参数,并制作样件进行实际测试和评估,可以验证优化设计方案的有效性,并进一步优化设计方案。
起重机伸缩臂伸缩原理

起重机伸缩臂伸缩原理
起重机伸缩臂是一种常见的起重设备,它能够通过伸缩来适应不
同高度的工作需求。
其中,起重机伸缩臂的伸缩原理是其能够顺利运
转的基础。
首先,起重机伸缩臂伸缩原理是通过采用液压系统实现的。
液压
系统采用液体传递压力来实现机械运动,因此起重机伸缩臂伸缩也是
通过液压系统来实现的。
其次,起重机伸缩臂的伸缩原理是通过液压缸来实现的。
液压缸
是液压系统中的重要组成部分,它可以将液体的压力转换成机械力,
从而实现伸缩臂的伸缩。
具体来说,当液压系统向液压缸中充入液体时,液压缸的活塞就
会被推动向伸缩臂的一端。
这样一来,伸缩臂就会向外伸展,从而实
现伸缩臂的伸长。
反之,当液压系统将液体从液压缸中排放时,液压
缸的活塞则会被拉回到起始位置,伸缩臂也会缩回到原来的长度。
此外,起重机伸缩臂伸缩原理还需要考虑到液压系统中的控制阀。
控制阀可以对液压系统中的液体流量进行控制,从而实现对起重机伸
缩臂伸缩速度和长度的控制。
因此,控制阀的调节是起重机伸缩臂能
否顺利运转的关键。
总之,起重机伸缩臂伸缩原理是通过采用液压系统和液压缸来实
现的。
液压缸的活塞可以将液压系统中的液体压力转换为机械力,从
而实现起重机伸缩臂的伸缩。
此外,起重机伸缩臂的运行速度和长度还受到控制阀的调节控制。
掌握这些原理,就可以更好地维护和操作起重机伸缩臂设备了。
起重机大臂伸缩原理

起重机大臂伸缩原理起重机是一种用于吊装和搬运重物的机械设备,广泛应用于建筑工地、港口码头、工厂等领域。
而起重机的大臂伸缩功能是其重要的工作原理之一。
起重机的大臂伸缩原理主要依靠液压系统来实现。
液压系统是利用液体的压力传递力量和控制运动的一种技术,通过液体的传递来实现机械设备的工作。
起重机的大臂伸缩液压系统由液压泵、液压缸、液压阀等组成。
起重机的大臂伸缩液压系统中的液压泵起到了压力传递的作用。
液压泵将液体从液压油箱中抽取出来,并通过压力传递给液压缸。
液压泵产生的压力使液压缸中的液体产生压力,从而推动液压缸的活塞运动。
液压缸是起重机大臂伸缩液压系统中的核心部件。
当液压泵产生的压力传递到液压缸时,液压缸的活塞就会受到压力的作用而运动。
液压缸的活塞由密封件密封,使得液压缸内的液体无法泄漏,从而保证了液压缸的工作效果。
液压阀是起重机大臂伸缩液压系统中的控制部件。
液压阀可以控制液压缸的运动方向和速度,从而实现起重机大臂的伸缩。
液压阀通过控制液压系统中液体的流动方向和流量来控制液压缸的运动。
当液压泵产生的液体通过液压阀流入液压缸时,液压阀可以控制液体的流动方向,使液压缸的活塞向外伸出或向内收回,从而实现起重机大臂的伸缩。
起重机大臂伸缩液压系统的工作过程中,液压泵不断地将液体送入液压缸,使液压缸的活塞不断向外伸出,起重机大臂也随之伸出。
而当液压阀控制液体的流向改变时,液压缸的活塞也会相应地向内收回,起重机大臂也会收回。
通过液压系统的控制,起重机大臂的伸缩可以灵活地调整,以适应各种工作需要。
起重机大臂伸缩原理的应用使得起重机具备了更高的灵活性和适应性,能够满足不同工作场景的需求。
通过液压系统的控制,起重机大臂的伸缩可以实现快速、精确的调节,提高了起重机的工作效率和安全性。
起重机大臂伸缩原理是依靠液压系统来实现的,液压泵、液压缸和液压阀是起重机大臂伸缩液压系统中的关键组成部分。
通过液压系统的工作原理,起重机大臂能够实现灵活的伸缩运动,提高起重机的工作效率和适应性。
吊车大臂伸缩绳排原理
吊车大臂伸缩绳排原理吊车大臂伸缩绳排是吊车伸缩机构的重要组成部分,它通过伸缩绳排的伸缩来实现吊臂的伸缩,从而实现吊车的伸缩功能。
在吊车工作中,吊臂的伸缩功能是非常重要的,它能够满足各种作业需求,提高吊车的作业效率和灵活性。
因此,了解吊车大臂伸缩绳排的原理对于吊车的使用和维护具有重要意义。
吊车大臂伸缩绳排主要由伸缩绳排、伸缩绳轮、伸缩绳、伸缩绳轮座、伸缩绳排座等部件组成。
当吊车需要伸缩时,伸缩绳排通过伸缩绳轮和伸缩绳连接吊臂,通过伸缩绳排座和伸缩绳轮座等部件固定在吊车的伸缩机构上。
当伸缩绳排受到伸缩力作用时,伸缩绳排会沿着伸缩绳轮的轨道进行伸缩运动,从而带动吊臂的伸缩。
伸缩绳排的伸缩过程需要保证伸缩绳排的稳定性和可靠性,以及伸缩绳排与伸缩绳轮的良好配合,从而确保吊臂的伸缩能够顺利进行。
吊车大臂伸缩绳排的伸缩原理是利用伸缩绳排和伸缩绳轮之间的摩擦力和张力来实现的。
当吊车需要伸缩时,伸缩绳排受到伸缩力作用,通过伸缩绳轮的摩擦力和张力来实现吊臂的伸缩。
在伸缩过程中,伸缩绳排和伸缩绳轮之间的摩擦力需要保持在一个合适的范围内,既要保证伸缩绳排的伸缩顺利进行,又要保证伸缩绳排的稳定性和可靠性。
此外,伸缩绳排和伸缩绳轮之间的张力也需要保持在一个合适的范围内,以确保吊臂的伸缩能够平稳进行。
在吊车工作中,吊车大臂伸缩绳排的伸缩原理对于吊车的使用和维护具有重要意义。
在使用吊车时,需要根据吊车的工作需求和吊臂的伸缩情况来合理调整伸缩绳排和伸缩绳轮之间的摩擦力和张力,以确保吊臂的伸缩能够顺利进行。
在维护吊车时,需要定期对吊车大臂伸缩绳排进行检查和维护,以确保吊车大臂伸缩绳排的稳定性和可靠性。
总之,吊车大臂伸缩绳排的伸缩原理是利用伸缩绳排和伸缩绳轮之间的摩擦力和张力来实现的。
了解吊车大臂伸缩绳排的伸缩原理对于吊车的使用和维护具有重要意义,可以帮助用户更好地使用和维护吊车,确保吊车的安全运行和作业效率。
吊臂伸缩原理
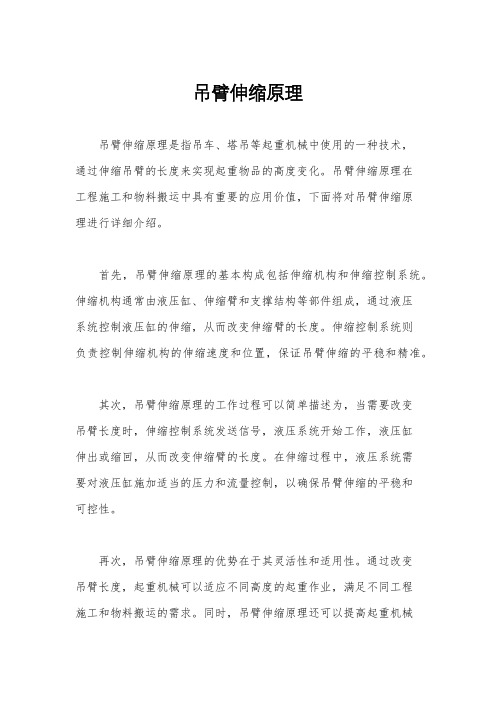
吊臂伸缩原理吊臂伸缩原理是指吊车、塔吊等起重机械中使用的一种技术,通过伸缩吊臂的长度来实现起重物品的高度变化。
吊臂伸缩原理在工程施工和物料搬运中具有重要的应用价值,下面将对吊臂伸缩原理进行详细介绍。
首先,吊臂伸缩原理的基本构成包括伸缩机构和伸缩控制系统。
伸缩机构通常由液压缸、伸缩臂和支撑结构等部件组成,通过液压系统控制液压缸的伸缩,从而改变伸缩臂的长度。
伸缩控制系统则负责控制伸缩机构的伸缩速度和位置,保证吊臂伸缩的平稳和精准。
其次,吊臂伸缩原理的工作过程可以简单描述为,当需要改变吊臂长度时,伸缩控制系统发送信号,液压系统开始工作,液压缸伸出或缩回,从而改变伸缩臂的长度。
在伸缩过程中,液压系统需要对液压缸施加适当的压力和流量控制,以确保吊臂伸缩的平稳和可控性。
再次,吊臂伸缩原理的优势在于其灵活性和适用性。
通过改变吊臂长度,起重机械可以适应不同高度的起重作业,满足不同工程施工和物料搬运的需求。
同时,吊臂伸缩原理还可以提高起重机械的作业效率和安全性,减少施工现场的占地面积和人工操作,提升施工效率和安全性。
最后,吊臂伸缩原理的发展趋势是向着智能化和自动化方向发展。
随着科技的不断进步,起重机械的伸缩控制系统将更加智能化和自动化,通过传感器、控制器和执行机构的联动,实现吊臂伸缩的精准和自动化控制,提高起重机械的智能化水平和作业效率。
总之,吊臂伸缩原理作为起重机械中的重要技术,具有广泛的应用前景和发展空间。
通过不断优化伸缩机构和伸缩控制系统,提高吊臂伸缩的精准度和自动化水平,可以更好地满足工程施工和物料搬运的需求,推动起重机械技术的进步和发展。
伸缩起重机的原理

伸缩起重机的原理
伸缩起重机的原理是利用伸缩臂和升降机构来实现起重功能。
伸缩臂是起重机的关键部分,它由多个伸缩节段组成,可以实现伸缩的功能。
伸缩臂的伸缩节段之间通过液压缸或螺杆机构等连接,通过控制液压缸或螺杆机构的伸缩来实现整个伸缩臂的伸缩。
升降机构包括主升降机构和辅助升降机构。
主升降机构通常由液压缸或电机驱动的链条、螺杆等部件组成,用于控制整个起重机的升降。
辅助升降机构用于提供额外的升降功能,通常是通过液压缸或电机驱动的伸缩臂。
起重机的工作原理是通过控制伸缩臂和升降机构的运动来实现起重操作。
当起重机需要进行起重时,将伸缩臂伸展到适当的位置,然后通过升降机构将吊钩或其他起重装置升高到需要的高度,然后进行起重操作。
当起重完成后,将起重装置放下,收回伸缩臂,将升降机构降低到初始位置,完成整个起重过程。
通过灵活的伸缩臂和升降机构的设计,伸缩起重机可以在狭小或高度限制的工作环境中灵活操作,并能够适应不同的起重需求。
伸缩臂吊车的工作原理应用

伸缩臂吊车的工作原理应用1. 概述伸缩臂吊车是一种常见的起重设备,由底盘、旋转机构、塔托、伸缩臂、平衡臂和起重机构等组成。
它以其灵活的操作和强大的起重能力,在建筑工地、港口码头、物流仓储等领域得到广泛应用。
本文将介绍伸缩臂吊车的工作原理和应用。
2. 工作原理伸缩臂吊车的工作原理基于液压系统和机械转动机构的协同工作。
液压系统负责提供动力和控制各个部件的运动,而机械转动机构则负责实现吊臂的旋转。
下面通过列举伸缩臂吊车的工作原理来详细介绍其工作过程。
1.底盘固定:伸缩臂吊车的底盘通过液压支腿固定在地面上,确保吊车在工作时的稳定性。
2.旋转机构:伸缩臂吊车的旋转机构通过液压系统驱动,使吊臂能够360度旋转,帮助起重物体定位和吊运。
3.伸缩臂:伸缩臂是伸缩臂吊车最重要的组成部分,它由多段铰接臂组成,通过液压缸驱动实现伸缩运动。
伸缩臂的伸缩能力可以使吊车在狭小空间内进行起重操作。
4.平衡臂:平衡臂的作用是平衡伸缩臂的重量和起重物的重力,以确保整个吊车的平衡性。
平衡臂通过液压缸进行调节,使得伸缩臂水平停留在需要的位置。
5.起重机构:起重机构是伸缩臂吊车的核心部分,它通过液压系统驱动起重钩实现起重功能。
起重机构的起重能力取决于吊车的设计和液压系统的性能。
3. 应用领域伸缩臂吊车广泛应用于建筑、港口和物流等领域。
以下是其主要应用领域:•建筑工地:伸缩臂吊车能够在建筑工地上进行高空起重作业,如吊装建筑材料、安装大型钢结构等。
•港口码头:伸缩臂吊车可以用于港口码头进行集装箱装卸作业,快速高效地转移货物。
•物流仓储:伸缩臂吊车可以用于物流仓储场地进行货物的装卸和堆垛作业,提高物流效率和作业安全性。
•铁路施工:伸缩臂吊车在铁路施工中发挥重要作用,如铺轨、钢轨拆装、桥梁建设等。
•高空作业:伸缩臂吊车能够在高空进行作业,如修复高架道路、安装广告牌等。
4. 优势和注意事项伸缩臂吊车具有以下优势:•灵活性:伸缩臂吊车可以在狭小空间内进行工作,具有较高的机动性。
汽车起重机吊臂构造及伸缩原理

吊臂的力学原理
杠杆原理
吊臂可以看作是一个杠杆,一头是作业 对象(重物),另一头是配重。当重物 和配重的力矩相等时,吊臂可以保持平 衡。当重物重量增加时,需要增加配重 或者缩短工作半径来保持平衡。
汽车起重机吊臂构 造及伸缩原理
汇报人: 日期:
目录
• 汽车起重机吊臂概述 • 汽车起重机吊臂构造 • 汽车起重机吊臂伸缩原理 • 汽车起重机吊臂的应用与维护 • 汽车起重机吊臂的发展趋势与展望
01
汽车起重机吊臂概述
吊臂在汽车起重机中的作用
吊臂是汽车起重机的核心构件之一,其主要作用是支撑起吊重,实现物体的升降 和水平位移。通过吊臂的伸缩和变幅,汽车起重机能够满足不同作业场合的需求 。
。
副臂
一般由两段矩形钢和一块特制的 底板组成,用销轴连接。副臂的
作用是增加作业半径。
配重
为了平衡工作装置,在主臂的尾 端装有配重,配重可以是水箱或
铁块。
吊臂与汽车起重机的连接方式
销轴连接
吊臂的一端与转台通过销轴连接,这种连接方式可以允许吊臂在垂直和水平方向有一定的摆动,以适应作业时的 需要。
螺栓连接
整体伸缩
整个吊臂作为一个整体进行伸缩,吊臂的长度不会因节数而改变。 这种方式常用于机械系统。
分段伸缩
根据吊臂的结构和用途,将吊臂分成若干段,每段独立进行伸缩,以 达到理想的长度。这种方式常用于大型或特殊用途的汽车起重机。
吊臂伸缩的驱动系统
液压驱动
利用液压泵、液压缸等液压元件产生动力,推动吊臂进行伸缩。液压驱动具有较大的驱动 力和灵活性,适用于大型、重型或复杂结构的汽车起重机。
吊车升降伸缩臂原理

吊车升降伸缩臂原理
吊车伸缩臂是吊车上的一种液压装置,它包括油缸和活塞,用来调整工作臂伸屈幅度的大小,以保证起吊时的稳定性。
工作臂油缸的工作原理是:在起重机起吊重物时,起重臂处于伸直状态,此时,油缸的活塞杆处于拉伸状态,油缸内充满了液压油。
当重物吊起后,起重臂开始下降。
此时,油缸内充满了压缩空气,由于受力的原因,活塞杆开始向下移动。
活塞杆在下移时受到重力和液压油压力的作用,使活塞杆向下运动。
当重物降至地面时,重物重心正好落在油缸的最低点处。
这时油缸内的压力突然变小,油缸活塞杆又向上运动到原来位置。
由于重物重心正好落在油缸的最高点处,所以此时的油缸活塞杆处于压缩状态。
—— 1 —1 —。
吊车伸缩臂的工作原理
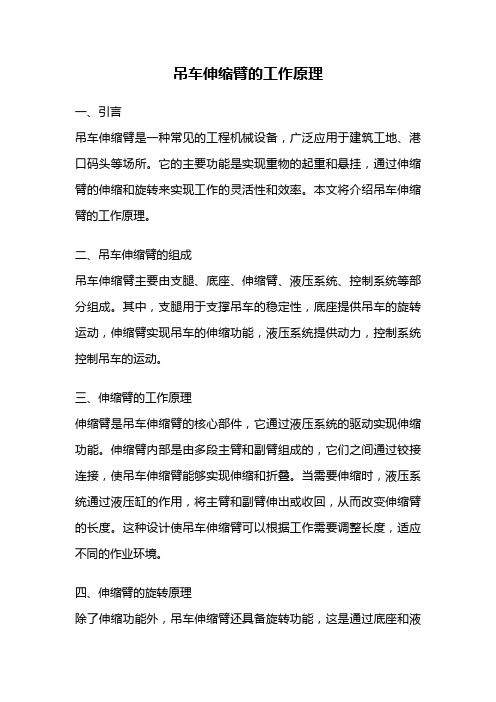
吊车伸缩臂的工作原理一、引言吊车伸缩臂是一种常见的工程机械设备,广泛应用于建筑工地、港口码头等场所。
它的主要功能是实现重物的起重和悬挂,通过伸缩臂的伸缩和旋转来实现工作的灵活性和效率。
本文将介绍吊车伸缩臂的工作原理。
二、吊车伸缩臂的组成吊车伸缩臂主要由支腿、底座、伸缩臂、液压系统、控制系统等部分组成。
其中,支腿用于支撑吊车的稳定性,底座提供吊车的旋转运动,伸缩臂实现吊车的伸缩功能,液压系统提供动力,控制系统控制吊车的运动。
三、伸缩臂的工作原理伸缩臂是吊车伸缩臂的核心部件,它通过液压系统的驱动实现伸缩功能。
伸缩臂内部是由多段主臂和副臂组成的,它们之间通过铰接连接,使吊车伸缩臂能够实现伸缩和折叠。
当需要伸缩时,液压系统通过液压缸的作用,将主臂和副臂伸出或收回,从而改变伸缩臂的长度。
这种设计使吊车伸缩臂可以根据工作需要调整长度,适应不同的作业环境。
四、伸缩臂的旋转原理除了伸缩功能外,吊车伸缩臂还具备旋转功能,这是通过底座和液压系统的配合实现的。
底座上安装有旋转机构,它可以使吊车伸缩臂在水平方向上旋转360度。
液压系统通过控制旋转机构的液压马达,实现吊车伸缩臂的旋转运动。
旋转功能使吊车能够灵活调整工作方向,提高施工效率。
五、液压系统的工作原理液压系统是吊车伸缩臂的动力来源,它由液压泵、液压缸、液压阀等组成。
液压泵负责将液压油从油箱吸入并压力,液压油通过管道输送到液压缸。
液压缸接收液压油的压力作用,通过活塞的运动实现伸缩臂的伸缩和旋转。
液压阀用于控制液压油的流向和压力,实现吊车伸缩臂的运动控制。
六、控制系统的工作原理控制系统是吊车伸缩臂的大脑,它通过控制液压系统的运行来实现对吊车伸缩臂的控制。
控制系统由控制面板、传感器、电气元件等组成。
操作人员通过控制面板上的按钮和杆位,发送指令给控制系统。
传感器感知吊车伸缩臂的位置和状态,并将信息反馈给控制系统。
控制系统根据传感器的反馈信息,控制液压系统的工作,从而实现吊车伸缩臂的运动控制。
吊车伸缩原理
吊车伸缩原理吊车是一种常见的起重设备,广泛用于工地、港口等各种场所。
吊车的伸缩原理是指吊车在工作时可以根据需要进行伸缩,以适应不同的起重距离和工作环境。
吊车的伸缩原理主要包括伸缩机构、伸缩液压系统和控制系统三个方面。
首先,吊车的伸缩机构是实现吊臂伸缩的关键部件。
吊臂通常由多节伸缩臂组成,通过伸缩机构的作用,可以使吊臂在水平方向上伸缩。
伸缩机构通常由液压缸、伸缩臂、滑道等部件组成。
当液压缸工作时,伸缩臂在滑道上进行伸缩运动,从而改变吊臂的长度。
通过控制伸缩机构的工作,可以实现吊臂的伸缩,以满足不同的起重距离需求。
其次,吊车的伸缩液压系统是实现吊臂伸缩动作的动力来源。
伸缩液压系统通常由油箱、油泵、液压缸、液压阀等部件组成。
在工作时,液压泵将液压油从油箱中抽出,并通过液压阀控制液压油进入液压缸,从而驱动伸缩机构的运动。
液压系统的工作稳定性和可靠性直接影响到吊臂的伸缩性能,因此对液压系统的设计和维护非常重要。
最后,吊车的伸缩控制系统是实现吊臂伸缩动作的控制中枢。
伸缩控制系统通常由控制阀、传感器、执行元件等部件组成。
通过控制阀对液压系统的工作进行调节,可以实现对吊臂伸缩运动的精确控制。
传感器用于检测吊臂的伸缩位置和状态,将反馈信号传输给控制系统,从而实现对吊臂伸缩动作的闭环控制。
总的来说,吊车的伸缩原理是通过伸缩机构、伸缩液压系统和控制系统的协同作用,实现吊臂在水平方向上的伸缩运动,以满足不同的起重距离需求。
吊车的伸缩原理在工程机械领域具有重要的应用价值,对于提高吊车的工作效率和灵活性具有重要意义。
吊车吊臂伸缩原理
吊车吊臂伸缩原理
吊车吊臂的伸缩,是指吊臂的水平位移和垂直位移。
当起重机处于静止状态时,由于受到风载、地震、机械冲击等载荷的作用,吊车吊臂将发生不同程度的变形,特别是垂直位移更大。
如果起重机在吊臂伸缩过程中,不能保证其水平位置不变,则会导致起重臂向不同方向弯曲变形,引起起重机严重损坏。
吊臂的垂直位移是指吊臂在水平平面内的位移。
当起重机处于静止状态时,吊臂所受到的风载、地震、机械冲击等载荷产生的垂直载荷和水平载荷相互抵消,因此吊臂所受垂直和水平载荷之和为零,而吊臂水平位移与垂直位移之差就是起重机的垂直位移。
在吊车吊臂伸缩过程中,垂直和水平载荷会相互抵消,因此起重机吊臂会向同一方向弯曲。
为了保证起重机吊臂能水平伸缩,吊臂在伸缩过程中必须保证其平衡性。
吊臂会向同一方向弯曲,造成此种情况主要是由于吊臂自身重量产生了相当大的横向变形。
—— 1 —1 —。
汽车起重机吊臂构造及伸缩原理

汽车起重机吊臂伸缩原理
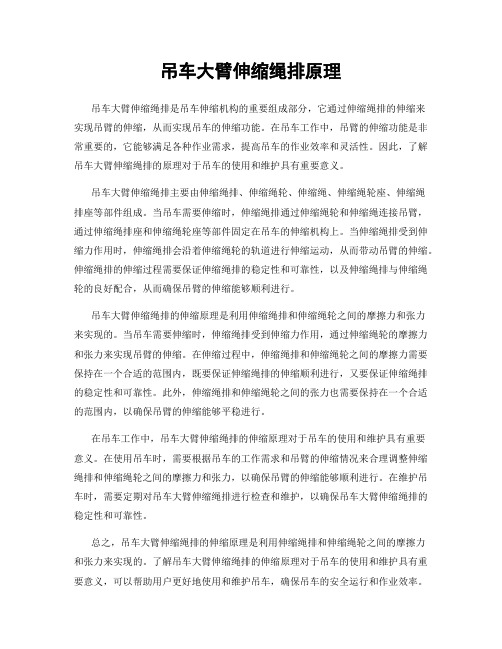
自动插销式伸缩机构
采用单缸、互锁的缸销和臂销、精确测长电子技术,其优点是重量轻,对
整机稳定性的影响最小,伸缩速度较快、吊臂截面变化小、吊重刚度好,但技术
难度大,成本较高,臂长种类少。(顺序伸缩,从内向外)
汽车起重机吊臂伸缩原理
利勃海尔为自动插销式伸缩机构的开创者,其伸缩机构具有能互锁的缸 销和臂销,且缸销设计在吊臂两侧,臂销设计在吊臂上平面 。其优点是 结构简单,自锁性强,缺点是大变形拔臂销时费劲,需要来回伸缩才能拔 出 格鲁夫将互锁的臂销和缸销合二为一,布置在吊臂的两侧 ,但结构布置 困难、要求精度高
汽车起重机主吊臂按结构形式可以分为:
A 桁架臂:由型材和管材焊接而成的桁架结构起重臂 B具有各种断面的箱型结构起重臂
汽车起重机吊臂构造
汽车起重机主吊臂按使用特点可以分为
A 主臂 B 副臂 C 基本臂 D 最长主臂 E 伸缩臂
汽车起重机吊臂构造
汽车起重机主吊臂按截面形式可以分为: 1、矩形截面 2、梯形截面 3、六边形截面 4、八边形截面 5、多边形截面 6、U形截面
伸缩机构由伸臂油缸或伸臂Байду номын сангаас缸加拉索组成。
汽车起重机吊臂伸缩原理
按伸缩机构的技术不同分为
无销全液压伸缩机构 自动插销式伸缩机构
无销全液压伸缩机构的优点是臂长变化 容易,工作臂长种类多,实用性很强。 缺点是自重大,对整机稳定性的影响较 大。
汽车起重机吊臂伸缩原理
第一种特点是最末一节伸缩臂采用钢丝绳伸缩,其它 伸缩臂采用多级缸或多个单级缸或多级缸和单级缸套 用等方式直接用油缸伸缩。因而最末伸缩臂的截面变 化较大,其它臂节截面的变化较小。
汽车起重机吊臂伸缩原理
吊臂伸缩原理

吊臂伸缩原理吊臂伸缩原理是指吊车、塔吊等起重机械中的吊臂部分可以根据需要进行伸缩,以适应不同工作场合和工作要求。
吊臂伸缩的原理主要是通过液压系统或机械传动系统来实现的。
液压系统是吊臂伸缩的常见原理之一。
液压系统通过液压油的压力来驱动伸缩缸,从而实现吊臂的伸缩。
当液压油进入伸缩缸时,伸缩缸的活塞会受到压力而向外伸展,从而使吊臂伸出;相反,当液压油从伸缩缸中排出时,活塞会受到外力的作用而收缩,使吊臂缩回。
这样通过控制液压系统的液压油进出来实现吊臂的伸缩。
另一种常见的原理是机械传动系统。
机械传动系统通过齿轮、链条、蜗杆等传动装置来实现吊臂的伸缩。
当伸缩机构受到外力作用时,传动装置会带动吊臂的伸出或缩回。
这种原理相对于液压系统来说,结构简单、维护成本低,但是伸缩速度较慢,操作相对繁琐。
无论是液压系统还是机械传动系统,吊臂伸缩原理都是为了满足起重机械在不同工作场合的工作需求。
在狭窄的施工现场,可以将吊臂缩回以便操作;而在需要覆盖更大范围的工作场合,可以将吊臂伸出以提高工作效率。
吊臂伸缩原理的应用使得起重机械在施工现场的适应性更强,工作范围更广。
除了液压系统和机械传动系统外,还有一些新型的吊臂伸缩原理正在不断发展和应用。
比如电动伸缩系统,利用电动机驱动吊臂的伸缩;智能伸缩系统,通过传感器和控制系统实现吊臂的自动伸缩等。
这些新技术的应用,使得吊臂伸缩更加智能化、精准化,为起重机械的操作和安全提供了更多可能。
总的来说,吊臂伸缩原理是起重机械中的重要部分,它的应用使得起重机械在不同工作场合更加灵活高效。
无论是液压系统、机械传动系统还是新型技术的应用,都为吊臂伸缩提供了多种选择,满足了不同工程施工的需求,推动了起重机械行业的发展。
起重机的伸缩臂原理

起重机的伸缩臂原理“哇,你们看那个大起重机,好厉害啊!”我和小伙伴们在路边看着正在施工的起重机,发出阵阵惊叹。
那起重机就像一个巨大的钢铁巨人,高高地耸立在那里。
它的伸缩臂一会儿伸长,一会儿缩短,就像孙悟空的金箍棒一样神奇。
我心里充满了好奇,这起重机的伸缩臂到底是怎么工作的呢?起重机的伸缩臂是由很多节组成的,就像我们玩的可伸缩的玩具一样。
这些节可以一节一节地伸出来,也可以一节一节地缩回去。
每一节都有自己的作用呢!关键部件之一就是液压缸啦!它就像起重机的“大力水手”,给伸缩臂提供强大的力量。
还有那些钢丝绳,就像起重机的“安全带”,把伸缩臂紧紧地拉住,不让它掉下来。
这些关键部件可重要了,没有它们,起重机可就没法工作了。
起重机的伸缩臂原理其实挺简单的,就像我们叠罗汉一样。
当需要伸长的时候,液压缸就会把一节节的臂推出去,就像我们一个一个地往上叠人。
当需要缩短的时候,液压缸就会把臂拉回来,就像我们一个一个地下来。
嘿嘿,是不是很好理解呀?那起重机的伸缩臂都用在哪些地方呢?有一次,我和爸爸妈妈去公园玩。
在路上,我们看到一辆大卡车坏了,停在路边。
不一会儿,一辆起重机开了过来。
起重机的伸缩臂慢慢地伸出来,就像一只长长的手臂,把大卡车轻轻地吊了起来。
哇,太厉害了!如果没有起重机,那大卡车可就不知道怎么办了。
还有一次,我们学校旁边的工地在盖大楼。
起重机的伸缩臂一会儿伸长,一会儿缩短,把那些重重的建筑材料吊到高高的楼上。
工人们叔叔们就像小蚂蚁一样,在大楼上忙碌着。
如果没有起重机,那些建筑材料可怎么运上去呢?起重机的伸缩臂可真是个神奇的东西啊!它就像一个超级英雄,哪里有需要,它就出现在哪里。
它让我们的生活变得更加方便,更加美好。
我觉得起重机的伸缩臂就像我们的梦想一样,可以不断地伸展,去追求更高更远的目标。
只要我们有梦想,有努力,就一定能像起重机的伸缩臂一样,创造出属于自己的精彩。
吊臂伸缩原理

吊臂伸缩原理吊臂伸缩原理是指吊车、起重机等设备中吊臂的伸缩工作原理。
吊臂伸缩是指吊臂长度的可变化,通过伸缩操作可以实现吊臂的延长和缩短,以适应不同工作场景和要求。
吊臂伸缩原理的掌握对于吊车操作人员和维护人员来说至关重要,下面将详细介绍吊臂伸缩原理的相关知识。
1. 吊臂伸缩的作用。
吊臂伸缩是吊车、起重机等设备的重要功能之一,它可以使吊臂在不同的工作范围内进行伸缩,从而实现对物体的吊装和移动。
在实际工程中,由于工作场景和物体的不同,需要调整吊臂的长度以适应实际需求,这时就需要用到吊臂的伸缩功能。
吊臂伸缩的灵活性和便利性,使得吊车等设备可以更好地适用于各种工程施工和物料搬运任务。
2. 吊臂伸缩的原理。
吊臂伸缩的原理主要是通过液压系统来实现的。
液压系统通过控制液压缸的伸缩,从而改变吊臂的长度。
液压缸是通过液压油的压力来实现伸缩动作的,当液压油被输送到液压缸内部时,液压缸会伸长;当液压油被排出时,液压缸会缩短。
通过控制液压系统的工作,可以实现对吊臂长度的精确控制。
3. 吊臂伸缩的操作。
吊车操作人员在进行吊臂伸缩操作时,首先需要确保设备处于稳定状态,然后通过控制台上的操作按钮或手柄来控制液压系统,实现吊臂的伸缩。
在操作过程中,需要根据实际情况和要求来调整吊臂的长度,确保吊臂能够准确地达到工作位置,并能够承载所需的重量。
操作人员需要熟练掌握吊臂伸缩的操作技巧,以确保工作的安全和高效进行。
4. 吊臂伸缩的注意事项。
在进行吊臂伸缩操作时,操作人员需要注意以下几点:在伸缩吊臂时,要确保周围没有人员和障碍物,以免发生意外伤害。
在伸缩过程中,要随时观察吊臂的状态和工作情况,确保吊臂的伸缩操作顺利进行。
在伸缩结束后,要及时将液压系统切换到锁定状态,以防止吊臂在工作中发生意外伸缩。
5. 吊臂伸缩的维护。
吊臂伸缩系统是吊车等设备的重要部件,需要定期进行维护保养。
在日常使用过程中,要及时清洁液压系统,检查液压管路和接头是否有漏油现象,确保液压系统的正常工作。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Abstract: With the rapid development of China economic construction, wheeled crane technology has been rapidly increasing, .telescopic boom technology as one of the most important technologies,have happdened earth-shaking changes. In this paper, a variety of telescopic lifting arm body composition and work principle were summarized and studyed. And the author hopes the reader design a more economical and less failure rate telescopic arm mechanism at the same time learning more about its development and changes, Key words: telescopic boom; single-cylinder bolt’s mechanism; wheeled crane
就是简单的滑轮原理。
出。 69
第 31 卷第 06 期
65
起重臂伸缩机构原理的研究— ——郑 红,等来自Vol.31No.06
4 32 1
缩 回 ,同 时 也 带 动 3、4、5 节 臂 一 起 回 缩 ,直 至 回 缩
到原始位置为止。
6
5
4 32 1
78
9
图 1 4 节臂伸缩机构工作原理
1. 1 节 臂 2. 2 节 臂 3. 4 节 臂 伸 臂 绳 4. 3 节 臂 5. 4 节 臂 缩 臂 绳 6. 4 节臂 7. 伸缩油缸 8. 3 节臂伸臂绳 9. 3 节臂缩臂绳
与 4 节臂同步回缩的原理弯曲相同。 如上节所述。 后才能释放该节臂和其它节臂的联接。 臂销释放
伸缩油缸 2 缩回到原始位置之后,伸缩油缸 1 才可 后,伸缩油缸伸出即可带动起重臂伸出。 起重臂单
以回缩。 伸缩油缸 1回缩的同时,一方面带动 2 节臂 缸伸缩机构要求动作灵活、可靠性高、响应速度快、 70
大幅度、高起升高度情况下的性能起到至关重要的 影响, 而伸缩臂的关键技术在于伸缩机构的型式。 目前我国生产的汽车起重机以中、 小吨位为主,普 遍采用伸缩油缸加绳排的伸缩机构的型式,只是在 细节上各具特点。 该伸缩机构的特点是最末 1、2 节 伸缩臂采用钢丝绳伸缩, 其它伸缩臂用油缸伸缩, 因而最末伸缩臂的截面变化较大,大大降低了起重 机在大幅度下的起重性能。 同时该型式在 5 节臂以 上伸缩臂应用时难度较大。 西方发达国家则主要生 产 50 t 以上的中 、大吨位轮式 起 重 机 ,伸 缩 机 构 普 遍采用单缸插销型式。 该技术特点是结构简单,空 间局限性小, 1 绳排系统
Vol.31No.06
起重臂伸缩机构原理的研究— ——郑 红,等
第 31 卷第 06 期
互锁性好,否则,很难实现吊臂的可靠伸缩。
性和可靠性,另外设计了一套应急操作系统,在自
54 3
21
动伸缩系统出现故障时,利用应急操作系统可将吊
臂安全缩回。
3 结语
介绍了绳排系统以及单缸插销技术的原理和
结构,阐述了各自的利弊,虽然目前有些日本企业
有将绳排技术发展到 6 节甚至更多,但是对于中大
67 8
9
图 3 单缸插销工作原理
1. 1 节臂 2. 臂销 3. 2 节臂 4. 3 节臂 5. 4 节臂 6. 缸销 7. 臂销
弹簧 8. 臂销螺杆 9. 伸缩油缸
(2)单缸伸缩机构自动伸缩的控制系统
该系统主要由控制器、显示器、操作手柄、长度
传感器、位置检测开关等电子元气件组成。 之所以
绳排系统在中国已经应用的比较成熟,也是一 种历史比较悠久的技术。 此技术的优点是臂长变化 容易、工作臂长种类多、可以带载伸缩、实用性很 强,缺点是自重重、对整机稳定性的影响较大。 现在 在 100 t 以下的起重机上应用的比较广泛, 其原理
节臂同步伸缩;4 节臂的一般单缸双绳排为 2.3.4 节 同步伸缩。
的。 5 节主臂缩回的工作原理:缩回的原则是伸缩油 机构采用内置式机械互锁系统,即在伸缩油缸上装
缸 2 缩回之后,才允许伸缩油缸 1 回缩。 这个程序 的油缸弹簧系统驱动缸销将伸缩油缸与起重臂锁
是由电气系统控制的。 伸缩油缸 2 缩回的同时,通 定之后, 才允许释放该节臂和其他节臂的连接臂
过 两 组 伸 缩 臂 绳 带 动 3、4、5 节 臂 同 步 回 缩 的 原 理 销。 该机构确保某一节伸缩臂和伸缩油缸互相锁定
由于核电、钢铁、桥梁各种工程建设的大型化, 所需的配套设备构件等的重量也不断增加,对超大 型起重设备的需求也愈来愈多,起重机技术也随着 市场的步伐得到了长足发展。 伸缩缸加绳排的伸缩 机构技术已经不能满足需求,于是一种新型的伸缩 机构技术产生,单缸插销技术。 经过多年的发展,此 技术已经成熟并广泛应用于大吨位轮式起重机上。 其工作原理如图 3 所示。 单缸插销式伸缩臂技术是 典型的机、电、液一体化系统,现对伸缩臂中的几点 关键技术浅述如下:
关键词: 伸缩臂; 单缸插销式; 轮式起重机 中图分类号: TD528 文献标志码: A 文章编号: 1003 - 0794(2010)06 - 0069 - 03
Research of Crane Telescopic Boom Theory
ZHENG Hong1, WU Guo-rui2 (1. Hunan Vocational and Technical Institute of Mechanical and Electrical, Changsha 410100, China; 2, Sany Heavy
当伸缩油缸有杆腔进油时,伸缩油缸的缸筒回 缩。 通过油缸缸筒的绞点轴带动 2 节臂同步回缩,3 节臂缩臂绳的一端固定在 3 节臂尾端,通过 2 节臂 尾端滑轮架 1 上的缩臂轮,将另一端固定在 1 节臂 头部上方的连接架上。 在 2 节臂回缩的同时,通过 2 节臂尾端滑轮架 1 上的缩臂轮带动 3 节臂以 2 节 臂 2 倍 的 回 缩 速 度 回 缩 。 即 实 现 2、3 节 臂 同 步 回 缩。 4 节臂缩臂绳的一端固定在 4 节臂的尾端,通过 3 节臂尾端滑轮架 2 上的缩臂轮将另一端固定在 2 节臂头部上方的连接架上。 在 3 节臂回缩的同时,3 节臂尾端滑轮架 2 上的缩臂轮带动 4 节臂以三 3 臂 2 倍 的 回 缩 速 度 回 缩 , 即 实 现 3、4 节 臂 同 步 回 缩。 从而实现 2、3、4 节臂同步回缩。
第 31 卷第 06 期 2010 年 06 月
煤矿机械 Coal Mine Machinery
Vol.31 No.06 Jun. 2010
起重臂伸缩机构原理的研究
郑 红 1, 吴国锐 2 (1. 湖南机电职业技术学院, 长沙 410100; 2. 三一重工, 长沙 410100)
摘 要: 随着我国经济建设的迅速发展,轮式起重机技术也得到迅速提高,伸缩臂技术作为轮 式起重机最重要的技术之一,有了翻天覆地变化。 本文对各种起重臂伸缩机构的组成及工作原理 进行了综述和研究,希望读者详细了解其发展变化的同时能有所启发,设计出更经济适用、更少故 障率的伸缩臂机构。
0 引言
对于 4 节臂以上起重臂的伸缩机构又分为:①
伸缩臂作为轮式起重机的主要受力构件,其重 多缸或多级缸加一级绳排;②单缸或多缸加两级绳
量一般占整机的 13%~20%,而大型起重机占的比例 排。 现在,大多数 5 节臂的起重机使用的是双缸双
则更大。 因此,伸缩臂技术对大吨位轮式起重机在 绳排的技术, 一般为第 2 节臂独立伸缩, 第 3、4、5
(1)单缸插销机构组成 作为伸缩臂伸缩的执行机构,主要由(见图 4) 伸缩缸、臂销机构、缸销机构、拔销机构等组成。 其 主要特点是采用单个油缸推动各节臂伸缩,在每节 臂 0%、46%、92%、100%处各有 1 个臂销孔,臂尾两 侧各有 1 个缸销孔,臂销位于每节臂的尾部,用于
所述)。 5 节主臂伸出的工作原理:伸缩油缸 1 的无 与相邻臂的锁定, 缸销位于伸缩油缸缸筒的缸帽
7
8 9 10
11
图 2 5 节臂伸缩机构工作原理 1. 1 节臂 2. 2 节臂 3. 4 节臂缩臂 绳 4. 3 节 臂 5. 4 节 臂 6. 5 节 臂 7. 4 节 臂 伸 臂 绳 8. 5 节 臂 伸 臂 绳 9. 5 节 臂 缩 臂 绳 10. Ⅱ号 伸
缩油缸 11. Ⅰ号伸缩油缸
目前市场上 5 节臂的轮式起重机均采用了此 伸缩机构。 2 单缸插销技术
验的基础上,任何细节的忽略都将导致功败垂成。
(3)自动伸缩的液压系统
系统主要由控制伸缩油缸的液压回路和控制
吨位起重机, 一般企业还是优先考虑单缸插销技 术。
单缸伸缩机构要求动作灵活、可靠性高、响应 速度快、互锁性好,否则,很难实现吊臂的可靠伸 缩。 单缸插销技术采用单缸、互锁的缸销和臂销、精 确测长电子技术,优点是重量最轻,对整机稳定性 的影响最小,但技术难度大、成本较高、臂长种类 少、伸缩时间长、臂长变化时麻烦。 现在,徐重和浦 沅等国内企业也成功研制出了此项技术,采用的是 和 LIEBHERR 相似 的 拔 销 装 置 置 于 伸 缩 机 构 上 方 的形式。 由于此技术对于电液的要求较高,尤其是 在 自动伸缩的 PLC 控制和伸 缩系统 的 液 压 回 路 的 设计上,国内企业的技术还不是太成熟,可靠性还 不是太高,还有较长的路去走。