三轴电子罗盘的设计与误差校正
罗盘误差修正
罗盘的检验和误差纠正“风水罗盘的校验和误差纠正”这是当今所有风水大师和所有风水爱好者的必修课。
很多“风水大师”和“风水写书人”都会说:“一度之差,天壤之别,吉、凶两重天”,但你能肯定你的罗盘没有“角度指示误差”吗?你是如何认定的呢?你如果不知道罗盘会有什么样的经常被人们忽略了的但却是“很重要的误差”,你那“大师”怎么当的?都是忽悠罢了?在当今,中国传统文化的光辉重新普照大地之时,风水设计和风水勘测已经被更广大的民众所了解和认可,很多人也开始学习并涉足于其中。
风水学,在其实际使用中,最关键之处就在于“对坐向方位的勘测”,所必需的首要工具,当然首选专业的“风水罗盘”。
但在用罗盘来进行实地勘测操作时,很多风水师(或者风水学学习爱好者)会发现,对同一个被勘测的对象,在同一个位置,以同样的方法,用不同的罗盘进行测量时,往往几个罗盘所测得的结果相互之间的坐向角度值(度数)总会有些不一样,存在一些误差,到底以哪一个罗盘的数据为准呢?大家都莫终于是,即便换人来测也是如此,而且往往在很多时候就这么一两度之差,就是“吉”、“凶”两重天,到底该如何来评判呢?这常常会给人一种不好的印象,似乎只能由风水大师各说各有理了,谁说了都算又都不算,让人们无所适从了。
这种现象势必会影响风水学的可靠信和可信度了。
这个问题出在哪里呢?我们先不论个人操作方法的对错以及技术上的熟练和否,先来谈一谈罗盘本身。
在我们忽略了使用者个人的人为误差之后,问题的主要根源也就在于“罗盘的“制造误差”上”了。
理论上,一个精准的罗盘,它的外盘(正方形底座)上的“十字型指标线的十字心(交叉点)”和内盘(转盘)的旋转轴心线应该是能重合的,以此同时,内盘中央的“指南针表盘”之“米字线”之中心点也应该和内盘(转盘)之“旋转轴心线”重合,而且指南针的“指针之转轴”也应该和“转盘的旋转轴心线”重合,指南针表盘内的米字线之“北、东、南、西正十字线”要正对内盘(转盘)360度分度的“0°”、“90°”、“180°”、“270°”刻度,不仅如此,旋转内盘时,还要求外盘(正方形底盘)上的“十字形指标线”必须能够同时正压在内盘(转盘)圆周360度分度的“0°”、“90°”、“180°”、“270°”刻度线上,不能有偏差,无论从哪个方向旋转内盘,无论旋转多少次都必须如此能够回到这样的状态。
三轴仪校准规程
三轴仪校准规程(实用版)目录1.三轴仪的概述2.三轴仪校准的必要性3.三轴仪校准的步骤4.三轴仪校准的注意事项5.三轴仪校准的优点正文【三轴仪的概述】三轴仪,又称为三轴加速度计,是一种能够同时测量物体在三个正交轴向上加速度的传感器。
这种传感器广泛应用于各种领域,如汽车安全气囊控制、手机陀螺仪、智能穿戴设备等。
【三轴仪校准的必要性】由于在使用过程中,三轴仪可能会受到温度、湿度、振动等因素的影响,导致其测量数据出现偏差。
因此,定期对三轴仪进行校准,以确保其测量数据的准确性,是十分必要的。
【三轴仪校准的步骤】三轴仪的校准步骤一般包括以下几个步骤:1.准备工作:首先,需要确保校准设备和工具的完备,如校准软件、校准仪等。
2.连接校准设备:将三轴仪与校准设备连接,并打开校准软件。
3.设置校准参数:根据三轴仪的型号和规格,设置相应的校准参数。
4.执行校准:运行校准软件,开始校准过程。
在校准过程中,三轴仪会根据校准设备的指令,进行一系列的加速度测量,并将测量结果与标准值进行比较,以此来调整其内部参数。
5.校准结果确认:校准完成后,需要对校准结果进行确认,如果校准结果在允许的误差范围内,则表示校准成功。
【三轴仪校准的注意事项】在进行三轴仪校准时,需要注意以下几点:1.确保校准环境稳定:避免在振动、温度变化大、电磁干扰强等环境中进行校准。
2.选择合适的校准设备:选择与三轴仪相匹配的校准设备,以保证校准的准确性。
3.校准过程中,避免触碰三轴仪:在校准过程中,避免触碰三轴仪,以免影响校准结果。
【三轴仪校准的优点】定期进行三轴仪校准,可以带来以下优点:1.提高测量准确性:通过校准,可以消除三轴仪的测量误差,提高其测量准确性。
2.保证设备正常运行:通过校准,可以确保三轴仪在正常工作范围内运行,避免因数据误差导致的设备故障。
高精度电子罗盘的误差修正技术研究
高精度电子罗盘的误差修正技术研究冯田佳点;孙乾;吕建廷【摘要】常规的数字罗盘受实际工作环境影响很大,输出精度较低,为了使其达到更高精度级别的精度和分辨率,本文全面分析了产生误差的原因,提出了相关的误差补偿算法、进行了仿真,并研制了相应的3轴数字罗盘硬件平台,结果表明可以很大程度上提高罗盘的输出精度和分辨率。
【期刊名称】《科技风》【年(卷),期】2012(000)016【总页数】2页(P8-9)【关键词】电子罗盘;MEMS磁传感器;MEMS加速度计;倾角测量;嵌入式系统【作者】冯田佳点;孙乾;吕建廷【作者单位】华东理工大学,上海市 200237;华东理工大学,上海市 200237;华东理工大学,上海市 200237【正文语种】中文电子罗盘依据地磁场的方向测量指向,同时通过磁传感器感应地球磁场实现测向定位。
地理的两极和地磁场的两极不重合,两者连线之间存在的磁偏角。
且地球磁场的磁力线在地球表面的分布的大小和方向是不同的。
比如在北美,磁力线与地球表面呈70度,这个角叫磁倾角。
在本文所用的三轴磁传感器中,其内部集成了3个惠斯通电桥,它们彼此互相垂直,分别对应直角坐标系中的x、y、z轴。
在通过这3个轴取得初始的磁数据后经过桥偏置补偿、硬铁补偿后,所得数据即可用于3D方程的求解,进而计算航向。
本文所用的三轴磁传感器中对应直角坐标系中的x轴和y轴决定了水平面,z轴垂直于水平面,此处的地磁场Hearth在水平面上的分量Hnorth所指即磁北的方向。
而x轴所指的即当前的方位的正前方,所以我们只需要测出x轴和Hnorth之间的夹角即可以知道当前的方位角α。
上述即为水平状态时电子罗盘的测角原理。
由式1可知我们所测得的方位角只是当前位置和地磁北极之间的夹角。
由于地磁北极和地理北极之间存在磁偏角,故应根据磁偏角相应的加上或减去当前所在方位的磁偏角,得到的才是当前位置真正的方位角。
而地球不同位置的磁偏角不同,应利用GPS接收器来确定当前的位置,从而校正地理位置带来的方位角测量误差。
基于磁通门的三轴电子罗盘自动误差补偿方法
基于磁通门的三轴电子罗盘自动误差补偿方法张韦;刘诗斌;冯文光;邓盼盼【期刊名称】《传感技术学报》【年(卷),期】2012(25)12【摘要】该方法以自制的小型三轴磁通门航向系统为基础,加入MEMS三轴加速度计,形成了三轴电子罗盘的硬件结构.针对电子罗盘的罗差容易受到环境影响的特点,研究了自动误差补偿方法.首先对加速度计进行校准,其次采用基于椭球拟合的算法进行磁通门罗差的自动补偿,在剩余误差分析的基础上,利用加速度计的输出用递推最小二乘的方法对剩余误差进行了自动补偿.室温下实验结果表明该方法不仅方便有效,而且电子罗盘的误差从15°降低至2°内,在大倾角(60°)情况下也能保持较好精度.%The hardware structure of the three-axis electronic compass is formed by a small triaxial fluxgate heading system and a triaxial accelerometer. For the magnetic deviation of electronic compass is different in various application environment,an automatic error compensation method is proposed to solve this problem. Firstly,the accelerometer is calibrated, and then a magnetic deviation compensation algorithm based on the ellipsoid fitting is used for the automatic compensation, and the last, according to the output of accelerometer, a recursive least square method is used to compensate the residual error in the previous step. The experimental results at indoor temperature show that the method is not only effective and convenient, but also the error ofelectronic compass can be reduced from 15° to 2°. The electronic compass can maintain good accuracy in big tilt angle situation(60°).【总页数】4页(P1692-1695)【作者】张韦;刘诗斌;冯文光;邓盼盼【作者单位】西北工业大学电子信息学院,西安710072;西北工业大学电子信息学院,西安710072;西北工业大学电子信息学院,西安710072;西北工业大学电子信息学院,西安710072【正文语种】中文【中图分类】V241.61;TP212【相关文献】1.基于椭球拟合的三轴加速度计误差补偿方法 [J], 张海鹰;何波贤;郑铁山;吴一2.三轴电子罗盘的磁航向角误差补偿研究 [J], 张爱军;王昌明;赵辉3.基于椭圆假设的电子罗盘误差补偿方法 [J], 刘诗斌;冯晓毅;李宏4.三轴磁阻电子罗盘的设计和误差补偿 [J], 邵婷婷5.基于最小二乘法和卡尔曼滤波算法的平面电子罗盘误差补偿方法研究 [J], 李蓉; 张一帆; 杨薇薇因版权原因,仅展示原文概要,查看原文内容请购买。
罗盘误差修正
罗盘误差修正罗盘的检验与误差纠正“风水罗盘的校验与误差纠正”这是当今所有风水大师和所有风水爱好者的必修课。
很多“风水大师”和“风水写书人”都会说:“一度之差,天壤之别,吉、凶两重天”,但你能肯定你的罗盘没有“角度指示误差”吗?你是如何认定的呢?你如果不知道罗盘会有什么样的经常被人们忽略了的但却是“很重要的误差”,你那“大师”怎么当的?都是忽悠罢了?在当今,中国传统文化的光辉重新普照大地之时,风水设计和风水勘测已经被更广大的民众所了解和认可,很多人也开始学习并涉足于其中。
风水学,在其实际应用中,最关键之处就在于“对坐向方位的勘测”,所必需的首要工具,当然首选专业的“风水罗盘”。
但在用罗盘来进行实地勘测操作时,很多风水师(或者风水学学习爱好者)会发现,对同一个被勘测的对象,在同一个位置,以同样的方法,用不同的罗盘进行测量时,往往几个罗盘所测得的结果相互之间的坐向角度值(度数)总会有些不一样,存在一些误差,到底以哪一个罗盘的数据为准呢?大家都莫终于是,即便换人来测也是如此,而且往往在很多时候就这么一两度之差,就是“吉”、“凶”两重天,到底该如何来评判呢?这常常会给人一种不好的印象,似乎只能由风水大师各说各有理了,谁说了都算又都不算,让人们无所适从了。
这种现象势必会影响风水学的可靠信和可信度了。
这个问题出在哪里呢?我们先不论个人操作方法的对错以及技术上的熟练与否,先来谈一谈罗盘本身。
在我们忽略了使用者个人的人为误差之后,问题的主要根源也就在于“罗盘的“制造误差”上”了。
理论上,一个精准的罗盘,它的外盘(正方形底座)上的“十字型指标线的十字心(交叉点)”与内盘(转盘)的旋转轴心线应该是能重合的,以此同时,内盘中央的“指南针表盘”之“米字线”之中心点也应该与内盘(转盘)之“旋转轴心线”重合,而且指南针的“指针之转轴”也应该与“转盘的旋转轴心线”重合,指南针表盘内的米字线之“北、东、南、西正十字线”要正对内盘(转盘)360度分度的“0°”、“90°”、“180°”、“270°”刻度,不仅如此,旋转内盘时,还要求外盘(正方形底盘)上的“十字形指标线”必须能够同时正压在内盘(转盘)圆周360度分度的“0°”、“90°”、“180°”、“270°”刻度线上,不能有偏差,无论从哪个方向旋转内盘,无论旋转多少次都必须如此能够回到这样的状态。
摄影测量系统中三维电子罗盘的设计与实现的开题报告
摄影测量系统中三维电子罗盘的设计与实现的开题报告一、课题意义随着科技的不断发展,三维物理空间的测量和定位需求日益增加。
在涉及到建筑、地质、地理、测量和航空等领域的实际应用中,三维电子罗盘在一定程度上已成为必不可少的一个工具。
然而,随着测量精度和复杂度的提高,现有的三维电子罗盘已经无法完全满足需求。
因此,设计一种新的三维电子罗盘,具有更高的精度和可靠性,成为了当前的紧迫需求。
二、研究内容本设计将研究如何设计一种精度高、可靠性好的三维电子罗盘。
具体内容包括以下几个方面:1. 确定罗盘所需要具有的技术特点和功能需求,如测量精度、动态响应、工作环境和兼容性等;2. 建立三维电子罗盘的数学模型和测量理论模型,包括传感器的原理、信号分析、数据处理等;3. 确定罗盘的硬件设计方案,包括采用的传感器、控制电路、数据采集等;4. 进行软件开发,包括编写控制程序、数据采集、数据处理、数据显示和设备管理等。
三、研究难点1. 如何选择合适的传感器和控制电路,以确保罗盘具有足够的精度和响应速度;2. 如何处理不同传感器的信号,以提高测量精度和稳定性;3. 如何编写有效的控制程序和数据处理程序,以便将原始数据转换为有用的信息。
四、研究方法和步骤本设计将采用以下研究方法和步骤:1. 调查和分析现有的三维电子罗盘技术和产品,分析其优缺点,从中总结和提取可借鉴的经验和技术;2. 基于以上分析结果,确定本研究所需要的技术特点和功能需求;3. 建立三维电子罗盘的数学模型和测量理论模型,包括传感器的原理、信号分析、数据处理等;4. 根据以上研究结果,确定罗盘的硬件设计方案,进行样机的制作和测试;5. 利用以上研究成果,编写控制程序和数据处理程序,以便将原始数据转换为有用的信息。
五、预期成果本研究预期将会获得以下成果:1. 设计出一款精度高、可靠性好的三维电子罗盘,并对其进行测试和评估;2. 建立三维电子罗盘的数学模型和测量理论模型,并进行相关的分析研究;3. 编写出有效的控制程序和数据处理程序。
数字电子罗盘误差分析及校正技术研究

平均误差 7’ #/. ( 均方根) ! 注: 表中方位测量单位为度, 目标真值使用方向机测量, 测量 精度优于 $ 189, 车头指向与初始校正方向一 致时, 误差较小; 如果车头指向与初始方向不一致时, 误差将增大, 特别是相差 "/-. 时, 误差最大可达 "4. , 测量结果基本不能使用。 传统的校正技术是假定:
如果车头指向与初始方向不一致时误差将增大特别是相差180误差最大可达16则载体在原地旋转一周后测量数据在水平面的投影分量服从正圆分布经过多次试验验证当车载平台在某一指向校正如果车载平台的指向与校正方向差值小于30则平台指向变化对测量精度的影响较小因此在实际使用时可使用罗盘测量出载体平台的概略指向作为计算补偿量时的输入值数据处理流程使用式对电子罗盘输出值进行补偿的步骤和流程如下使用侦察设备的电子罗盘测量装载平台指向的概略方位为软铁磁场在xy轴上的投影分量但实际情况并非如此尤其是在本例中罗盘与平台之间存在相对运动导致软铁和硬铁的磁场强度的大小和方向不能够维持恒定加之实际应用时车载平台的指向是随机的导致了标定环境的磁场分布和使用环境的磁场分布不一致使标定失效测量精度变得非常差考虑装载平台指向补偿因素的校正方法假定未受干扰的地磁场在则目标方位角的真值应为瞄准目标记录电子罗盘输出值标定时需要注意以下几点用于标定的目标数量应不少于18并均匀分布在以观察中心为圆心的周边每隔30或更小测一组数据2台侦察设备分别安装在车载平台上然后应用本文给出的校正补偿方法对设备的补偿系数进行rctan为了得到目标方位角的真值必须从罗盘的输rctanrctan
盘生产商建议尽量移去罗盘附近的软铁物质, 然后对 硬铁物质进行校正。 ! ’ !# 特殊应用模式下的校正技术 #’ #’ "! 应用背景 电子罗盘置于某侦察设备中, 侦察设备的装载平 台为轻型越野车, 侦察设备能相对于车载平台进行方 位巡航和俯仰运动。通过测量侦察设备与目标之间的 距离以及观察光轴与目标之间的方位与俯仰角, 解算 出目标的地理坐标。为保证解算精度, 罗盘的定向精 ( 均方根) 。 度应优于 ". #’ #’ #! 运用简单校正方法的误差校正技术 一般情况下, 当罗盘使用于车载平台中时, 可采用
小型多旋翼无人机三轴电子罗盘设计与误差分析校准

小型多旋翼无人机三轴电子罗盘设计与误差分析校准1. 引言- 研究背景与意义- 本文的研究目的和内容2. 多旋翼无人机三轴电子罗盘设计- 电子罗盘原理- 三轴电子罗盘设计- 硬件选型和电路设计3. 误差分析与校准- 罗盘误差类型及原因分析- 罗盘校准方法介绍- 校准实验设计和实验结果分析4. 算法实现与测试- 姿态解算算法- 航向角解算算法- 算法测试方法和结果分析5. 结论与展望- 本文研究的主要成果和贡献- 在未来的发展和应用前景- 对改进和优化的建议和展望第1章:引言随着全球定位系统(GPS)的不断发展和普及,无人飞行器(UAV)技术也得到了快速发展。
多旋翼无人机作为一种轻型、灵活、易操控的无人机,逐渐成为了广大航模爱好者、科研工作者和商业应用者的心头好。
作为一种航空器,多旋翼无人机需要对其航向进行准确测量和控制,以便实现精准操控和自主导航等功能。
而电子罗盘作为一种精度较高的传感器,被广泛应用于航空领域中。
本文基于多旋翼无人机平台,研究了三轴电子罗盘的设计和误差校准方法,并对其航向角解算算法进行了实现和测试。
本研究的目的是提高多旋翼无人机的航向角测量精度,以满足其高精度定位和导航等应用需求。
本文的研究内容主要包括三个方面:(1)电子罗盘的设计和选型,包括硬件选型和电路设计等;(2)误差分析和校准方法的实验;(3)航向角解算算法的实现和测试。
通过这些方面的研究,本文将为多旋翼无人机的导航和控制等方面提供有益的参考和指导。
本文的结构按照如下方式组织。
第2章将详细介绍电子罗盘的原理和设计,包括其硬件选型和电路设计等方面的内容。
第3章将分析电子罗盘的误差类型及其原因,并介绍罗盘校准的方法。
第4章将讨论航向角解算算法的实现和测试方法。
第5章将回顾本文的主要研究成果和贡献,并对未来的发展和应用前景进行展望。
第2章:多旋翼无人机三轴电子罗盘设计2.1 电子罗盘原理电子罗盘是一种基于地球磁场原理的传感器,主要用于航空、船舶等领域中航向角的测量。
【误差补偿】基于椭球假设的三轴电子罗盘罗差补偿研究
( 1 School of Electronic Engineering and Automation,Guilin University of Electronic Technology,Guilin 541004 ,China; 2 School of Electrical and Mechanical Engineering,Xidian University,Xi'an 710071 ,China)
T 矩阵 K 满足 K K 为正定矩阵, 则关于 h 的二次型: T T v v = ( Kh + b ) ( Kh + b ) = h T K T Kh + 2 b T Kh + b T b
h = K - 1 ( v - b ) 的变化轨迹是一球面, 如前所述, 记 -1 L = K 则有: h T h = ( v - b ) T L T L ( v - b ) = v T L T Lv - 2 b T L T Lv + b L Lb = r2
T T
( 5)
式中: r 为未知常数, 因此按上文算法进行最小二乘拟合 2 T T 后的各系数实际均被除以( r - b L Lb ) 。这一未定常数 因子仅影响补偿后磁场矢量的模长, 亦即总磁场采样增
( 3)
2212
仪
器
仪
表
学
报
第32 卷
益, 对于航向解算没有直接影响。另一方面, 如 3 . 2 节所 T T 由拟合结果只能得到 L L ( 即 K K 的逆矩阵) , 由此 述, 分解得到 L 的方法不唯一。 T 算法 1 : 由于 L L 是对称正定阵,故可作乔里斯基 ( Cholesky) 分解, 从而得到上( 下) 三角形式的 L 。 b 则 T 利用 L L 的逆矩阵求出。 算法 2 : 如果假设 L 为对称阵且严格对角占优, 则将 式( 5 ) 右边展开并与式( 4 ) 比较可得:
三轴电子罗盘的设计与误差校正

三轴电子罗盘的设计与误差校正
王勇军;李智;李翔
【期刊名称】《传感器与微系统》
【年(卷),期】2010(029)010
【摘要】介绍了三轴电子罗盘的测量原理.利用各向异性磁阻传感器和加速度传感器研制了带倾斜补偿功能的三轴电子罗盘,并论述了电子罗盘的硬件设计和软件流程.针对电子罗盘传感器的误差特点,采用十二位置标定法实现了罗盘的校正.在罗盘处于不同倾斜的情况下进行圆周测试,经误差校正和倾角补偿后的轨迹是大体重合的圆,有效降低了罗盘误差.在某些具备翻滚条件的应用场合,该校正方法还可有效补偿电子罗盘的罗差.
【总页数】3页(P110-112)
【作者】王勇军;李智;李翔
【作者单位】桂林电子科技大学,电子工程学院,广西,桂林,541004;桂林电子科技大学,电子工程学院,广西,桂林,541004;桂林电子科技大学,电子工程学院,广西,桂林,541004
【正文语种】中文
【中图分类】TP212.9
【相关文献】
1.小型多旋翼无人机三轴电子罗盘设计与误差分析校准 [J], 范崧伟;卞鸿巍
2.三轴磁罗盘的设计与误差校正 [J], 刘敬彪;郑玉冰;章雪挺
3.三轴磁阻电子罗盘设计 [J], 马建仓;胡士峰;邵婷婷
4.全固态三轴电子罗盘的应用设计 [J], 高呈学;钟磊;张明瑞
5.三轴磁阻电子罗盘的设计和误差补偿 [J], 邵婷婷
因版权原因,仅展示原文概要,查看原文内容请购买。
电子罗盘的工作原理与校准电子罗盘,电子指南针,android
AndroidST集成传感器方案实现电子罗盘功能电子罗盘是一种重要的导航工具,能实时提供移动物体的航向和姿态。
随着半导体工艺的进步和电话操作系统的进展,集成了愈来愈多传感器的智能电话变得功能壮大,很多电话上都实现了电子罗盘的功能。
而基于电子罗盘的应用(如Android的Skymap)在各个软件平台上也流行起来。
要实现电子罗盘功能,需要一个检测磁场的三轴磁力传感器和一个三轴加速度传感器。
随着微机械工艺的成熟,意法半导体推出将三轴磁力计和三轴加速计集成在一个封装里的二合一传感器模块LSM303DLH,方便用户在短时刻内设计出本钱低、性能高的电子罗盘。
本文以LSM303DLH为例讨论该器件的工作原理、技术参数和电子罗盘的实现方式。
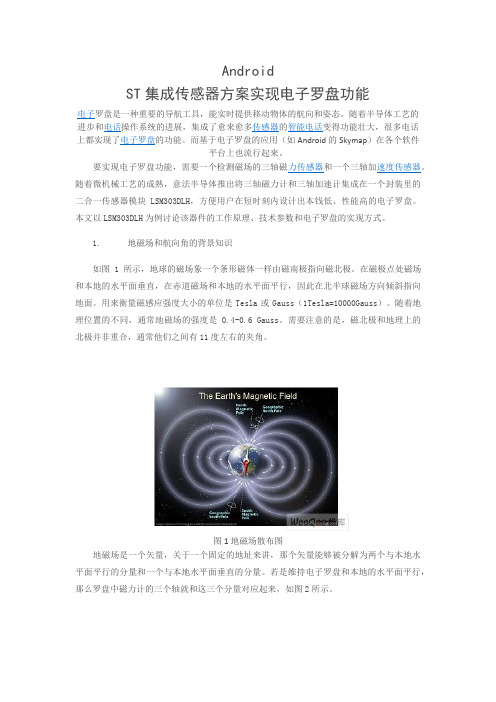
1. 地磁场和航向角的背景知识如图1所示,地球的磁场象一个条形磁体一样由磁南极指向磁北极。
在磁极点处磁场和本地的水平面垂直,在赤道磁场和本地的水平面平行,因此在北半球磁场方向倾斜指向地面。
用来衡量磁感应强度大小的单位是Tesla或Gauss(1Tesla=10000Gauss)。
随着地理位置的不同,通常地磁场的强度是0.4-0.6 Gauss。
需要注意的是,磁北极和地理上的北极并非重合,通常他们之间有11度左右的夹角。
图1 地磁场散布图地磁场是一个矢量,关于一个固定的地址来讲,那个矢量能够被分解为两个与本地水平面平行的分量和一个与本地水平面垂直的分量。
若是维持电子罗盘和本地的水平面平行,那么罗盘中磁力计的三个轴就和这三个分量对应起来,如图2所示。
图2 地磁场矢量分解示用意事实上对水平方向的两个分量来讲,他们的矢量和老是指向磁北的。
罗盘中的航向角(Azimuth)确实是当前方向和磁北的夹角。
由于罗盘维持水平,只需要用磁力计水平方向两轴(一样为X轴和Y轴)的检测数据就能够够用式1计算出航向角。
当罗盘水平旋转的时候,航向角在0?- 360?之间转变。
2.ST集成磁力计和加速计的传感器模块LSM303DLH2.1 磁力计工作原理在LSM303DLH中磁力计采纳各向异性磁致电阻(Anisotropic Magneto-Resistance)材料来检测空间中磁感应强度的大小。
三轴磁罗盘的设计与误差校正
三轴磁罗盘的设计与误差校正
刘敬彪;郑玉冰;章雪挺
【期刊名称】《自动化仪表》
【年(卷),期】2008(029)009
【摘要】介绍了三轴磁罗盘的工作原理,设计了一种利用磁阻传感器和加速度计测定航向角、俯仰角、侧滚角的测量系统.分析了影响磁罗盘测量精度的误差来源,并在此基础上提出了相应的校正方法.实验结果表明,利用这些算法,可使磁罗盘的航向角误差由±9°降到±0.6°,有效地降低了由于制造和安装等引起的误差.这种校正算法不仪适用于磁罗盘,也适用于其它三轴传感器系统.
【总页数】3页(P10-12)
【作者】刘敬彪;郑玉冰;章雪挺
【作者单位】杭州电子科技大学电子信息学院,浙江,杭州,310018;杭州电子科技大学电子信息学院,浙江,杭州,310018;杭州电子科技大学电子信息学院,浙江,杭
州,310018
【正文语种】中文
【中图分类】TP212.13
【相关文献】
1.一种数字磁罗盘的航向误差校正方法 [J], 王宇;吴志强;朱欣华
2.三轴电子罗盘的设计与误差校正 [J], 王勇军;李智;李翔
3.船用磁罗盘系统实时误差校正 [J], 吕金华;赵乾宏;刘明波
4.一种手持式电子磁罗盘航向误差校正方法 [J], 徐德昌;蔡成林;李思民;王亚娜
5.电子磁罗盘测量误差校正方法研究 [J], 沈鹏;徐景硕;高扬
因版权原因,仅展示原文概要,查看原文内容请购买。
电子罗盘基础知识及校准
无人机——磁力计/电子罗盘学习及校准电子罗盘是一种重要的导航工具,能实时提供移动物体的航向和姿态。
随着半导体工艺的进步和手机操作系统的发展,集成了越来越多传感器的智能手机变得功能强大,很多手机上都实现了电子罗盘的功能。
而基于电子罗盘的应用(如Android的Skymap)在各个软件平台上也流行起来。
要实现电子罗盘功能,需要一个检测磁场的三轴磁力传感器和一个三轴加速度传感器。
随着微机械工艺的成熟,意法半导体推出将三轴磁力计和三轴加速计集成在一个封装里的二合一传感器模块LSM303DLH,方便用户在短时间内设计出成本低、性能高的电子罗盘。
本文以LSM303DLH为例讨论该器件的工作原理、技术参数和电子罗盘的实现方法。
1.地磁场和航向角的背景知识如图1所示,地球的磁场象一个条形磁体一样由磁南极指向磁北极。
在磁极点处磁场和当地的水平面垂直,在赤道磁场和当地的水平面平行,所以在北半球磁场方向倾斜指向地面。
用来衡量磁感应强度大小的单位是Tesla或者Gauss(1Tesla=10000Gauss)。
随着地理位置的不同,通常地磁场的强度是0.4-0.6 Gauss。
需要注意的是,磁北极和地理上的北极并不重合,通常他们之间有11度左右的夹角。
图1 地磁场分布图地磁场是一个矢量,对于一个固定的地点来说,这个矢量可以被分解为两个与当地水平面平行的分量和一个与当地水平面垂直的分量。
如果保持电子罗盘和当地的水平面平行,那么罗盘中磁力计的三个轴就和这三个分量对应起来,如图2所示。
图2 地磁场矢量分解示意图实际上对水平方向的两个分量来说,他们的矢量和总是指向磁北的。
罗盘中的航向角(Azimuth)就是当前方向和磁北的夹角。
由于罗盘保持水平,只需要用磁力计水平方向两轴(通常为X轴和Y轴)的检测数据就可以用式1计算出航向角。
当罗盘水平旋转的时候,航向角在0?- 360?之间变化。
2.ST集成磁力计和加速计的传感器模块LSM303DLH2.1 磁力计工作原理在LSM303DLH中磁力计采用各向异性磁致电阻(Anisotropic Magneto-Resistance)材料来检测空间中磁感应强度的大小。
电子罗盘

电子罗盘主要分为磁通门、磁阻式和霍尔元件 三种。磁通门传感器是由一套环绕磁芯的线圈组成, 该磁芯配有励磁电路,能够提供低成本的磁场探测 方法,但它们体积偏大、易碎、响应时间慢。霍尔 效应磁传感器的优点是体积小,重量轻,功耗小, 价格便宜,接口电路简单,特别适用于强磁场的测 量。但是,它又有灵敏度低、噪声大、温 度性能 差等缺点。虽然有些高灵敏度或采取了聚磁措施霍 尔器件也能用于测 量地磁场,但一般都是用于要 求不高的场合。
模块设计
电子罗盘的设计框图如图1所示,可分为3大模块:传 感器模块、数据采集模块和MCU模块。系统 首先利用加 速度计敏感地球重力场中测量载体的姿态,然后通过姿 态坐标变换将磁阻传感器沿载体坐标的测量信号变换到 地平坐标系。在微处理器中进行实时姿态计算、坐标变 换,系统误差补偿,得到载体的姿态参数,将它们通过 串口在上位机实时输出。由于磁阻传感器的输出均为mv 级的电压信号,所以必须经过运算放大器放大后,才可 以送到A/D转换器进行模数转换。
磁阻传感器现在已经可以做成标准的集成芯片, 并且产品也形成了系列。而使用磁阻传感器的电 子罗盘克服了磁通门罗盘的不足,具有体积小、 重量轻、精度高、可靠性强、响应速度快等优点, 是未来电子罗盘的发展方向。
我们的设计
基于现状,本文我们采用磁阻传感器来设计电子磁 罗盘。设计电子磁罗盘的基本思路:首先考虑到三轴磁 阻传感器和加速度计的一些特性,我们采用HMC5883L三 轴磁阻传感器进行地球磁场矢量测量,加速度计 ADXl202敏感地球重力场中测量载体的姿态,然后通过 姿态坐标变换将磁阻传感器沿载体坐标的测量信号变换 到地平坐标系。其次我们将磁阻传感器的输出电压信号 进行放大,之后送到A/D转换器进行模数转换。在微处 理器中进行实时姿态计算、坐标变换,系统误差补偿, 得到载 体的姿态参数,将它们通过串口在上位机实时 输出。最后在微处理器中进行实时姿态计算、坐标变换,
无人机——磁力计电子罗盘学习及校准

无人机——磁力计/电子罗盘学习及校准电子罗盘是一种重要的导航工具,能实时提供移动物体的航向和姿态。随着半导体工艺的进步和手机操作系统的发展,集成了越来越多传感器的智能手机变得功能强大,很多手机上都实现了电子罗盘的功能。而基于电子罗盘的应用(如Android的Skymap)在各个软件平台上也流行起来。要实现电子罗盘功能,需要一个检测磁场的三轴磁力传感器和一个三轴加速度传感器。随着微机械工艺的成熟,意法半导体推出将三轴磁力计和三轴加速计集成在一个封装里的二合一传感器模块LSM303DLH,方便用户在短时间内设计出成本低、性能高的电子罗盘。本文以LSM303DLH为例讨论该器件的工作原理、技术参数和电子罗盘的实现方法。1.地磁场和航向角的背景知识如图1所示,地球的磁场象一个条形磁体一样由磁南极指向磁北极。在磁极点处磁场和当地的水平面垂直,在赤道磁场和当地的水平面平行,所以在北半球磁场方向倾斜指向地面。用来衡量磁感应强度大小的单位是Tesla或者Gauss(1Tesla=10000Gauss)。随着地理位置的不同,通常地磁场的强度是0.4-0.6 Gauss。需要注意的是,磁北极和地理上的北极并不重合,通常他们之间有11度左右的夹角。图1 地磁场分布图地磁场是一个矢量,对于一个固定的地点来说,这个矢量可以被分解为两个与当地水平面平行的分量和一个与当地水平面垂直的分量。如果保持电子罗盘和当地的水平面平行,那么罗盘中磁力计的三个轴就和这三个分量对应起来,如图2所示。图2 地磁场矢量分解示意图实际上对水平方向的两个分量来说,他们的矢量和总是指向磁北的。罗盘中的航向角(Azimuth)就是当前方向和磁北的夹角。由于罗盘保持水平,只需要用磁力计水平方向两轴(通常为X轴和Y轴)的检测数据就可以用式1计算出航向角。当罗盘水平旋转的时候,航向角在0?- 360?之间变化。2.ST集成磁力计和加速计的传感器模块LSM303DLH2.1 磁力计工作原理在LSM303DLH中磁力计采用各向异性磁致电阻(Anisotropic Magneto-Resistance)材料来检测空间中磁感应强度的大小。这种具有晶体结构的合金材料对外界的磁场很敏感,磁场的强弱变化会导致AMR自身电阻值发生变化。在制造过程中,将一个强磁场加在AMR上使其在某一方向上磁化,建立起一个主磁域,与主磁域垂直的轴被称为该AMR的敏感轴,如图3所示。为了使测量结果以线性的方式变化,AMR材料上的金属导线呈45º角倾斜排列,电流从这些导线上流过,如图4所示。由初始的强磁场在AMR材料上建立起来的主磁域和电流的方向有45º的夹角。图3 AMR材料示意图图4 45º角排列的导线当有外界磁场Ha时,AMR上主磁域方向就会发生变化而不再是初始的方向了,那么磁场方向和电流的夹角θ也会发生变化,如图5所示。对于AMR材料来说,θ角的变化会引起AMR自身阻值的变化,并且呈线性关系,如图6所示。图5 磁场方向和电流方向的夹角图6 θ-R特性曲线ST利用惠斯通电桥检测AMR阻值的变化,如图7所示。R1/R2/R3/R4是初始状态相同的AMR电阻,但是R1/R2和R3/R4具有相反的磁化特性。当检测到外界磁场的时候,R1/R2阻值增加∆R而R3/R4减少∆R。这样在没有外界磁场的情况下,电桥的输出为零;而在有外界磁场时电桥的输出为一个微小的电压∆V。图7 惠斯通电桥当R1=R2=R3=R4=R,在外界磁场的作用下电阻变化为∆R时,电桥输出?V正比于?R。这就是磁力计的工作原理。2.2 置位/复位(Set/Reset)电路由于受到外界环境的影响,LSM303DLH中AMR上的主磁域方向不会永久保持不变。LSM303DLH内置有置位/复位电路,通过内部的金属线圈周期性的产生电流脉冲,恢复初始的主磁域,如图8所示。需要注意的是,置位脉冲和复位脉冲产生的效果是一样的,只是方向不同而已。图8 LSM303DLH置位/复位电路置位/复位电路给LSM303DLH带来很多优点:1) 即使遇到外界强磁场的干扰,在干扰消失后LSM303DLH也能恢复正常工作而不需要用户再次进行校正。2) 即使长时间工作也能保持初始磁化方向实现精确测量,不会因为芯片温度变化或内部噪音增大而影响测量精度。3) 消除由于温漂引起的电桥偏差。2.3 LSM303DLH的性能参数LSM303DLH集成三轴磁力计和三轴加速计,采用数字接口。磁力计的测量范围从1.3 Gauss到8.1 Gauss共分7档,用户可以自由选择。并且在20 Gauss以内的磁场环境下都能够保持一致的测量效果和相同的敏感度。它的分辨率可以达到8 mGauss并且内部采用12位ADC,以保证对磁场强度的精确测量。和采用霍尔效应原理的磁力计相比,LSM303DLH的功耗低,精度高,线性度好,并且不需要温度补偿。LSM303DLH具有自动检测功能。当控制寄存器A被置位时,芯片内部的自测电路会产生一个约为地磁场大小的激励信号并输出。用户可以通过输出数据来判断芯片是否正常工作。作为高集成度的传感器模组,除了磁力计以外LSM303DLH还集成一颗高性能的加速计。加速计同样采用12位ADC,可以达到1mg的测量精度。加速计可运行于低功耗模式,并有睡眠/唤醒功能,可大大降低功耗。同时,加速计还集成了6轴方向检测,两路可编程中断接口。3. ST电子罗盘方案介绍一个传统的电子罗盘系统至少需要一个三轴的磁力计以测量磁场数据,一个三轴加速计以测量罗盘倾角,通过信号条理和数据采集部分将三维空间中的重力分布和磁场数据传送给处理器。处理器通过磁场数据计算出方位角,通过重力数据进行倾斜补偿。这样处理后输出的方位角不受电子罗盘空间姿态的影响,如图9所示。图9 电子罗盘结构示意图LSM303DLH将上述的加速计、磁力计、A/D转化器及信号条理电路集成在一起,仍然通过I2C总线和处理器通信。这样只用一颗芯片就实现了6轴的数据检测和输出,降低了客户的设计难度,减小了PCB板的占用面积,降低了器件成本。LSM303DLH的典型应用如图10所示。它需要的周边器件很少,连接也很简单,磁力计和加速计各自有一条I2C总线和处理器通信。如果客户的I/O接口电平为1.8V,Vdd_dig_M、Vdd_IO_A和Vdd_I2C_Bus 均可接1.8V供电,Vdd使用2.5V以上供电即可;如果客户接口电平为2.6V,除了Vdd_dig_M要求1.8V以外,其他皆可以用2.6V。在上文中提到,LSM303DLH需要置位/复位电路以维持AMR的主磁域。C1和C2为置位/复位电路的外部匹配电容,由于对置位脉冲和复位脉冲有一定的要求,建议用户不要随意修改C1和C2的大小。图10 LSM303DLH典型应用电路图对于便携式设备而言,器件的功耗非常重要,直接影响其待机的时间。LSM303DLH可以分别对磁力计和加速计的供电模式进行控制,使其进入睡眠或低功耗模式。并且用户可自行调整磁力计和加速计的数据更新频率,以调整功耗水平。在磁力计数据更新频率为7.5Hz、加速计数据更新频率为50Hz时,消耗电流典型值为0.83mA。在待机模式时,消耗电流小于3uA。4. 铁磁场干扰及校准电子指南针主要是通过感知地球磁场的存在来计算磁北极的方向。然而由于地球磁场在一般情况下只有微弱的0.5高斯,而一个普通的手机喇叭当相距2厘米时仍会有大约4高斯的磁场,一个手机马达在相距2厘米时会有大约6高斯的磁场,这一特点使得针对电子设备表面地球磁场的测量很容易受到电子设备本身的干扰。磁场干扰是指由于具有磁性物质或者可以影响局部磁场强度的物质存在,使得磁传感器所放置位置上的地球磁场发生了偏差。如图11所示,在磁传感器的XYZ 坐标系中,绿色的圆表示地球磁场矢量绕z 轴圆周转动过程中在XY平面内的投影轨迹,再没有外界任何磁场干扰的情况下,此轨迹将会是一个标准的以O(0,0)为中心的圆。当存在外界磁场干扰的情况时,测量得到的磁场强度矢量α将为该点地球磁场β与干扰磁场γ的矢量和。记作:图11 磁传感器XY坐标以及磁力线投影轨迹一般可以认为,干扰磁场γ在该点可以视为一个恒定的矢量。有很多因素可以造成磁场的干扰,如摆放在电路板上的马达和喇叭,还有含有铁镍钴等金属的材料如屏蔽罩,螺丝,电阻, LCD背板以及外壳等等。同样根据安培定律有电流通过的导线也会产生磁场,如图12。图12 电流对磁场产生的影响为了校准这些来自电路板的磁场干扰,主要的工作就是通过计算将γ求出。4.1 平面校准方法针对XY轴的校准,将配备有磁传感器的设备在XY平面内自转,如图11,等价于将地球磁场矢量绕着过点O(γx,γy)垂直于XY平面的法线旋转, 而红色的圆为磁场矢量在旋转过程中在XY平面内投影的轨迹。这可以找到圆心的位置为((Xmax + Xmin)/2, (Ymax + Ymin)/2). 同样将设备在XZ平面内旋转可以得到地球磁场在XZ平面上的轨迹圆,这可以求出三维空间中的磁场干扰矢量γ(γx, γy, γz).4.2 立体8字校准方法一般情况下,当带有传感器的设备在空中各个方向旋转时,测量值组成的空间几何结构实际上是一个圆球,所有的采样点都落在这个球的表面上,如图13所示,这一点同两维平面内投影得到的圆类似。图13 地球磁场空间旋转后在传感器空间坐标内得到球体这种情况下,可以通过足够的样本点求出圆心O(γx, γy, γz), 即固定磁场干扰矢量的大小及方向。公式如下:8字校准法要求用户使用需要校准的设备在空中做8字晃动,原则上尽量多的让设备法线方向指向空间的所有8个象限,如图14所示。图14 设备的空中8字校准示意图4.2 十面校准方法同样,通过以下10面校准方法,也可以达到校准的目的。图15 10面交准法步骤如图16所示,经过10面校准方法之后,同样可以采样到以上所述球体表面的部分轨迹,从而推导出球心的位置,即固定磁场干扰矢量的大小及方向。图16 10面校准后的空间轨迹5.倾斜补偿及航偏角计算经过校准后电子指南针在水平面上已经可以正常使用了。但是更多的时候手机并不是保持水平的,通常它和水平面都有一个夹角。这个夹角会影响航向角的精度,需要通过加速度传感器进行倾斜补偿。对于一个物体在空中的姿态,导航系统里早已有定义,如图17所示,Android中也采用了这个定义。Pitch(Φ)定义为x轴和水平面的夹角,图示方向为正方向;Roll(θ)定义为y轴和水平面的夹角,图示方向为正方向。由Pitch角引起的航向角的误差如图18所示。可以看出,在x轴方向10度的倾斜角就可以引起航向角最大7-8度的误差。图17 Pitch角和Roll角定义图18 Pitch角引起的航向角误差手机在空中的倾斜姿态如图19所示,通过3轴加速度传感器检测出三个轴上重力加速度的分量,再通过式2可以计算出Pitch和Roll。图19 手机在空中的倾斜姿态式3可以将磁力计测得的三轴数据(XM,YM ,ZM)通过Pitch和Roll 转化为式1中计算航向角需要的Hy和Hx。之后再利用式1计算出航向角。6.Android平台指南针的实现在当前流行的android 手机中,很多都配备有指南针的功能。为了实现这一功能,只需要配备有ST提供的二合一传感模块LSM303DLH,ST 提供整套解决方案。Android中的软件实现可以由以下框图表示:其中包括:BSP ReferenceLinux Kernel Driver (LSM303DLH_ACC + LSM303DLH_MAG)HAL Library(Sensors_lsm303dlh + Liblsm303DLH) for sensors.default.so经过library 的计算,上层的应用可以很轻松的运用由Android定义由Library提供的航偏角信息进行应用程序的编写。。
三轴磁阻电子罗盘的设计和误差补偿
三轴磁阻电子罗盘的设计和误差补偿邵婷婷【期刊名称】《单片机与嵌入式系统应用》【年(卷),期】2014(14)7【摘要】A 3-axes tilt compensation magnetoresistive electronic compass is developed,whose error is compensated.The magnetoresistive sensor HMC1043 and MEMS accelerometer ADXL203 are used to be the sampling module,and MSP430F149 is used to be the process-ing module,which can acquire and process the magnetic field intensity and gravity acceleration respectively,and the course angle and atti-tude angle are displayed by bining classic ellipse hypothesis method and Fourier series model,the error is compensa-ted.The experiment result shows that the designed electronic compass can display the carrier's course angle and attitude angle at real time,which achieves integration and intelligence,and the heading error can achieve ±0.6°steadily.%设计了一款具有倾斜补偿功能的三轴磁阻电子罗盘,并对样机系统做了误差补偿。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
c mp n ae w ih ef ciey r d c st e e o . i c l rt n meh d i as f ci e frt e c mp n ain o o e s td, h c f t l e u e h l r T s ai a i t o s l ef t o h o e s t f e v T h b o o e v o
偿后的轨迹是大体 重合 的圆, 有效 降低 了罗盘误差。在某些具备 翻滚条件 的应用场合 , 该校正方法还可有
效补偿电子罗盘的罗差 。 关键词 :电子罗盘 ;磁阻传感器 ; 加速度传感器 ; 误差校正 ;罗差
中图 分 类 号 :T 1. P22 9 文 献标 识码 :A 文 章 编 号 :1 0 -77 2 l ) 00 1-3 0 09 8 (o o 1- 100
0 引 言
随地点 ( 至随时间 ) 甚 而变化 。但 是 , 地磁场 的水 平分量永
随着导航定位技术 的飞速 发展 和 日臻 成熟 , 电子罗 盘 在相关领域得到 了越来越广泛的应用。电子罗盘是利用地 磁 场来 实现定 向功能的装置。 目前 , 已实现了基 于磁通 门 、 磁感应式 和霍尔效应 等不同类 型的电子罗盘 … 。其 中, 磁
n l o r m eec ett r et i r set l oni n t c ce f re o abao ad tt ag f i u frnets, et jc r saeesnil cic e t i i l at r rc ir i n i- e cc h a oe ay d wh r e r l t n l
摘
要 :介绍 了三轴 电子罗盘的测量原理 。利用各 向异性磁阻传感器 和加速度传感器研制 了带倾斜补偿
功能的三轴电子罗盘 , 并论述了电子罗盘 的硬件设计和软件流程 。针对 电子罗盘传感器的误 差特点 , 采用
十二位置标定 法实现了罗盘 的校正。在罗盘处 于不 同倾斜 的情况下进行 圆周测 试 , 误差 校正和倾 角补 经
De i n a d e r r c lb a i n o h e — x s ee t o i o p s sg n r o a i r to ft r e a i lc r n c c m a s
WA G Y n - n L h , I i g N o g u , I i L a j Z X n
1ห้องสมุดไป่ตู้ 1
传感器与微 系统 ( rnd cr n c ss m T cnlg s Tasue dMioyt eh o i ) a r e oe
21 0 0年 第 2 卷 第 1 9 O期
三轴 电子 罗盘 的设 计 与误 差 校 正
王 勇军 ,李 智 ,李 翔
( 林 电 子 科技 大学 电子 工 程 学 院 。 西 桂 林 5 10 ) 桂 广 4 0 4
ma e i d va in, h a et a o l g i p s il . n g t e it c o i te c s h t l n o sb e n r i s
Ke r s ee t n c c mp s ;ma e o rssie s n o ;a c t r mee ;e l rc l r t n;ma n t e it n y wo d : lcr i o a s o n g t — i v e s r c ee o t r r ) ai a i e t x b o g ei d vai c o
( co l f l t ncE g er g G inUnvri f l to cT c n l y Gul 4 04, hn ) Sh o e r i n i ei , ul iesyo e rn eh oo , in5 10 C ia oE co n n i t E c i g i