伺服电机编码器工作原理图
伺服电机内部结构图解
伺服电机内部结构图解1. 电机外部结构伺服电机是一种能够精确控制运动位置、速度和加速度的电动执行器。
其外部通常由电机本体、编码器、连接器和散热器等部分组成。
电机的外壳通常由金属材料制成,具有一定的防护性能和散热性能。
2. 电机内部结构2.1. 电机定子伺服电机的定子通常由铁芯和绕组组成。
铁芯通常采用硅钢片堆叠而成,以减小磁损和提高磁导率。
绕组则是将导电线圈绕制在铁芯上,通过通电产生磁场。
2.2. 电机转子电机的转子通常是由永磁体或导体绕组组成,永磁体转子常用于永磁同步电机,而绕组转子常用于感应电机。
转子在磁场的作用下可以发生旋转运动,从而带动负载实现机械运动。
2.3. 编码器编码器通常安装在电机轴端,用于实时反馈电机的角度位置信息。
根据不同的需求,编码器一般包括绝对值编码器和增量式编码器两种类型,可实现不同精度的位置控制。
2.4. 传感器伺服电机通常还配备有传感器用于监测电机的运行状态,如温度传感器、霍尔传感器等。
传感器可以帮助控制系统实时监测电机的工作状态,保证电机运行的安全性和稳定性。
3. 内部结构工作原理伺服电机的内部结构通过电流和磁场的相互作用实现电能到机械能的转换。
当电流通过绕组产生磁场时,磁场与永磁体或感应电动机之间会产生磁场力,从而使转子产生转动。
编码器实时反馈转子位置信息,控制系统根据编码器信号调整电流大小和极性,实现对电机的精准控制。
4. 总结伺服电机内部结构图解了解了电机的核心部件及其工作原理,这对于掌握伺服电机的工作原理和性能调优具有重要意义。
通过深入了解伺服电机内部结构,可以更好地应用和维护伺服电机设备,提高其运行效率和稳定性。
编码器原理图
编码器原理图编码器是一种将输入信号转换成特定格式的设备或电路,常见的编码器有数字编码器和模拟编码器。
在工业自动化领域,编码器被广泛应用于位置检测、角度测量、速度测量等方面。
本文将介绍编码器的原理图及其工作原理。
编码器原理图如下图所示:[图1,编码器原理图]编码器由输入端、处理电路和输出端组成。
输入端接收待编码的信号,处理电路将输入信号转换成特定格式的编码信号,输出端将编码信号输出给外部设备或系统。
在数字编码器中,常见的编码方式有绝对编码和增量编码。
绝对编码器可以直接读取位置信息,不需要回零操作;而增量编码器则需要通过计数器进行位置计算。
在模拟编码器中,常见的编码方式有正交编码和格雷编码。
正交编码器通过两个正交的信号来表示位置信息,而格雷编码器则通过二进制码来表示位置信息。
编码器的工作原理是将输入信号转换成特定格式的编码信号。
在数字编码器中,输入信号经过转换电路转换成数字信号;在模拟编码器中,输入信号经过转换电路转换成模拟信号。
编码器的输出信号可以直接用于控制系统或者通过接口转换模块转换成其他格式的信号。
编码器在工业自动化领域有着广泛的应用。
在机械设备中,编码器可以用于位置检测和速度测量;在电子设备中,编码器可以用于角度测量和位置控制。
编码器的高精度、高稳定性和高可靠性使其成为工业自动化系统中不可或缺的部分。
总的来说,编码器是一种将输入信号转换成特定格式的设备或电路,常见的编码器有数字编码器和模拟编码器。
在工业自动化领域,编码器被广泛应用于位置检测、角度测量、速度测量等方面。
编码器的工作原理是将输入信号转换成特定格式的编码信号,其输出信号可以直接用于控制系统或者通过接口转换模块转换成其他格式的信号。
在工业自动化系统中,编码器发挥着重要的作用,为系统的稳定运行提供了可靠的支持。
伺服电机编码器调零原理
伺服电机编码器调零原理伺服电机编码器调零是在使用伺服系统时非常重要的一个步骤,它能够确保伺服电机在运行中的准确定位和运动控制。
编码器是伺服电机的重要组成部分,用于反馈电机转动的角度和速度信息。
调零过程就是让编码器信号与实际位置一致,从而实现准确的控制。
编码器的作用编码器是一种传感器,能够将机械运动转换成电信号。
在伺服系统中,编码器主要用于反馈电机的实时位置和速度信息,以便系统控制器根据需求进行精确的控制。
编码器通常分为绝对式编码器和增量式编码器两种类型,它们在伺服系统中的应用略有不同。
编码器调零的原理在进行伺服电机编码器调零时,需要确保电机处于静止状态。
调零的过程是通过设置一个参考点(零点),使编码器的信号与该零点对应的位置一致。
具体的步骤如下:1.停止电机运动:首先确保电机处于停止状态,可以通过控制器进行停机操作。
2.找到参考点:确定一个位置作为编码器的零点,通常选择电机的某个固定位置作为参考点。
这个过程需要精确测量,确保选定的点符合实际需要。
3.设置零点:将编码器的当前位置清零,并校准为设定的参考点位置,确保编码器信号与实际位置一致。
4.确认调零:再次检查编码器的位置是否正确,确认调零成功。
调零的重要性良好的编码器调零是伺服系统正常运行的基础,只有在准确调零的情况下,系统才能准确控制电机的位置和速度。
如果编码器未正确调零,可能导致电机位置偏差,影响系统的运行精度,甚至引起不可预料的故障。
总结伺服电机编码器调零是确保伺服系统正常运行的重要步骤。
通过逐步设置零点,校准编码器位置,可以确保系统精确控制电机的位置和速度,提高系统运行的稳定性和精度。
在实际应用中,操作人员应该严格按照操作流程进行调零操作,确保系统能够正常运行。
编码器工作原理图解

编码器工作原理图解
编码器是一种将输入信息转化为特定编码格式的设备或程序。
它可以将输入的数据转换成数字、二进制或其他特定格式的编码形式。
在工作原理上,编码器通常包含以下组件:
1. 输入信号:编码器接收来自外部设备或系统的输入信号。
这些输入信号可能是来自传感器、开关、键盘等的物理量、逻辑状态或字节数据。
2. 编码器芯片:编码器芯片是整个编码器的核心部件。
它根据输入信号的类型和规范,将其转化为特定的编码格式。
编码器芯片内部通常包含逻辑门、移位寄存器和计数器等电子元件,用于实现特定的编码算法。
3. 编码算法:编码算法是编码器芯片内部的一套逻辑流程。
它根据输入信号的特性和编码要求,通过逻辑门、移位寄存器、计数器等组件的组合和操作,将输入信号转换为特定的编码形式。
编码算法的具体实现取决于编码器芯片的设计和规格。
4. 编码输出:编码器将编码算法处理后的结果输出为特定的编码形式。
这些输出可以是电平信号、脉冲序列、数字代码或其他根据编码器芯片和应用需求而定的形式。
5. 输出接口:编码器的输出接口将编码输出传递给外部设备或系统。
这些接口可以是数字输入/输出线、通信总线、串行数
据端口等,用于与其他设备或系统进行数据交换。
通过以上的工作原理和组件,编码器可以将输入信号转换为特定编码形式的输出。
这样,编码器可以用于数据压缩、信息传输、信号处理、位置控制等各种应用领域。
伺服电机编码器

伺服电机编码器是安装在伺服电机上用来测量磁极位置和伺服电机转角及转速的一种传感器,从物理介质的不同来分,伺服电机编码器可以分为光电编码器和磁电编码器,另外旋转变压器也算一种特殊的伺服编码器,目前市场上使用的基本上是光电编码器,不过磁电编码器作为后起之秀,有可靠,价格便宜,抗污染等特点,有赶超的光电编码器趋势。
编辑本段二、伺服电机编码器原理伺服编码器这个基本的功能与普通编码器是一样的,比如增量型的有A,A反,B,B反,Z,Z反等信号,除此之外,伺服编码器还有着跟普通编码器不同的地方,那就是伺服电机多数为同步电机,同步电机启动的时候需要知道转子的磁极位置,这样才能够大力矩启动伺服电机,这样需要另外配几路信号来检测转子的当前位置,比如增量型的就有UVW等信号,正因为有了这几路检测转子位置的信号,伺服编码器显得有点复杂了,以致一般人弄不懂它的道理了,加上有些厂家故意掩遮一些信号,相关的资料不齐全,就更加增添了伺服电机编码器的神秘色彩。
由于A、B两相相差90度,可通过比较A相在前还是B相在前,以判别编码器的正转与反转,通过零位脉冲,可获得编码器的零位参考位。
编码器码盘的材料有玻璃、金属、塑料,玻璃码盘是在玻璃上沉积很薄的刻线,其热稳定性好,精度高,金属码盘直接以通和不通刻线,不易碎,但由于金属有一定的厚度,精度就有限制,其热稳定性就要比玻璃的差一个数量级,塑料码盘是经济型的,其成本低,但精度、热稳定性、寿命均要差一些。
分辨率—编码器以每旋转360度提供多少的通或暗刻线称为分辨率,也称解析分度、或直接称多少线,一般在每转分度5~10000线。
编辑本段三、伺服电机编码器分类1、增量型编码器除了普通编码器的ABZ信号外,增量型伺服编码器还有UVW信号,目前国产和早期的进口伺服大都采用这样的形式,线比较多。
2、绝对值型伺服电机编码器增量式编码器以转动时输出脉冲,通过计数设备来知道其位置,当编码器不动或停电时,依靠计数设备的内部记忆来记住位置。
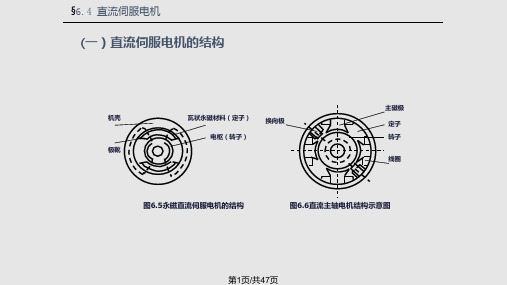
直流伺服电机PPT课件
电流反馈
功放
第14页/共47页
G
M
§6.4 直流伺服电机 (五) 直流进给运动的速度控制(2)PWM调速系统
① 主回路:
大功率晶体管开关放大器; ② 控制回路:功率整流器。
速度调节器;
电流调节器;
固定频率振荡器及三角波发生器;
脉宽调制器和基极驱动电路。
区别:
与晶闸管调速系统比较,速度调节器和电流调节
2) 脉宽调制器
同向加法放大器电路图 U S r –速度指令转化过
来的直流电压
U△
R1
U Sr
R1
R2
+ +12V
-
R3
USC
U △- 三角波
USC- 脉宽调制器的输
出( U S r +U △ )
调制波形图
U △+U S r
U△
+U S r
o
o
t
-12V U △+U S r
t
o
-U S r
t
U SC
电机转速与理想空载转速的差
(6.7)
ω(n) △ω
ωO
O
TL TS T
图6.7 直流电机的机械特性
第3页/共47页
§6.4 直流伺服电机 (二)一般直流电机的工作特性
2. 动态特性 直流电机的动态力矩平衡方程式为
TM TL J d
dt
式中
TM ─电机电磁转矩; TL ─ 折算到电机轴上的负载转矩; ω ─ 电机转子角速度; J ─ 电机转子上总转动惯量;
(6.1)
KT —转矩常数; Φ—磁场磁通;Ia —电枢电流;TM —电磁
转矩。电枢回路的电压平衡方程式为:
伺服电机原理图解及视频教学

伺服电机原理图解及视频教学
伺服电机是一种能够根据控制信号精确旋转到特定位置的电机,通常用于要求
高精度定位的应用领域,例如CNC机床、机器人等。
本文将从伺服电机的工作原理、结构组成、控制方式等方面进行图解及视频教学,帮助读者更好地理解伺服电机的工作原理。
1. 伺服电机的工作原理
伺服电机的工作原理基于反馈控制系统,其核心组成包括电机、编码器、控制
器和驱动器。
当控制器接收到位置设定信号后,通过编码器反馈实际位置信息,控制电机旋转至设定位置。
这种闭环控制系统能够实现高精度的位置控制,保证电机的准确性和稳定性。
2. 伺服电机的结构组成
伺服电机通常包括电机本体、编码器、减速器等组件。
电机本体负责转动,编
码器用于反馈位置信息,减速器则可以降低电机的转速并提高扭矩输出,使得伺服电机具有较大的输出功率密度和精度。
3. 伺服电机的控制方式
伺服电机的控制方式主要分为位置控制、速度控制和力矩控制。
在实际应用中,可以根据不同的场景选择合适的控制方式,以满足不同的控制要求。
4. 伺服电机的应用领域
伺服电机广泛应用于工业自动化、医疗设备、航空航天等领域。
在工业生产中,伺服电机能够实现高速、精密的运动控制,提高生产效率和产品质量;在医疗设备中,伺服电机能够实现精准的位置控制,提高手术精准度;在航空航天领域,伺服电机能够实现飞行器的精密控制,确保飞行安全。
结语
通过本文的图解及视频教学,希望读者能够对伺服电机的原理和应用有更深入
的了解,进而能够在实际应用中更好地使用伺服电机。
将伺服电机的高精度、高稳定性的特点发挥到极致,为各行各业的发展贡献力量。
伺服电机工作原理图
伺服电机工作原理图
伺服电机是一种能够在一定范围内精确控制位置、速度和方向的电动执行元件,被广泛应用于自动化控制领域。
了解伺服电机的工作原理对于工程师和技术人员来说至关重要。
下面我们来看一下伺服电机的工作原理图及其解析。
1. 伺服电机的结构
伺服电机通常由三个主要部分组成:电机、传感器和控制器。
电机部分包括电
动机、减速机构和传动轴,传感器用于检测电机当前的位置、速度和方向,控制器则负责接收传感器反馈信息并输出控制信号来调节电机运行状态。
2. 伺服电机工作原理图解
伺服电机工作原理如下图所示:
伺服电机原理图
在该原理图中,可以看到电源通过控制器进入电机,控制器接收传感器反馈信
号并根据设定的控制算法来调节电机的转速和位置。
传感器不断监测电机状态,将反馈信息传输给控制器,以实现精确的位置控制。
3. 工作原理图详解
•电源:为伺服电机提供工作所需的电力。
•电机:负责将电能转化为机械能,驱动负载运动。
•传感器:用于检测电机的位置、速度和方向,并将信息反馈给控制器。
•控制器:接收传感器反馈信号,根据设定的控制算法输出控制信号,调节电机运行状态。
•反馈信息:传感器实时检测电机状态,将信息反馈给控制器,保持电机运行稳定。
通过这种反馈控制机制,伺服电机能够实现精确的位置控制,广泛应用于自动
化装备、机器人和CNC机床等领域。
结语
以上是关于伺服电机工作原理的介绍,通过理解伺服电机的结构和工作原理图,我们能够更好地掌握伺服电机的工作原理,为工程实践提供重要参考。
希望本文能对您有所帮助,谢谢阅读!。
伺服驱动器接线原理图

编码器U+输入
U+
Type4
与伺服电机光电编码器U+相连接
CN1-9
编码器U-输入
U-
与伺服电机光电编码器U-相连接
CN1-20
编码器V+输入
V+
Type4
与伺服电机光电编码器V+相连接
CN1-8
编码器V-输入
V-
与伺服电机光电编码器V-相连接
CN1-19
编码器W+输入
W+
Type4
与伺服电机光电编码器W+相连接
端子记号
颜色
功能
记号
I/O
方式
CN1-5
CN1-6
CN1-17
CN1-18
5V电源
+5V
伺服电机光电编码器用+5V电源;
电缆长度较长时,应使用多根芯线并联,减小线路压降。
CN1-1
CN1-2
CN1-3
CN1-4
CN1-16
电源公共地
0V
CN1-24
编码器A+输入
A+
Type4
与伺服电机光电编码器A+相连接
CN2-6
PULS-
CN2-19
指令脉冲SIGN输入
SIGN+
Type3
P
CN2-7
SIGN-
CN2-25
屏蔽地线
FG
屏蔽地线端子
SD15M位置/模拟量控制方式标准接线
SD20MN/SD30MN/SD50MN/SD75MN位置/模拟量控制方式标准接线
相关标签:驱动器,伺服驱动器,
伺服驱动器接线端子说明
产品名称
伺服驱动器接线端子说明
产品规格
产品价格
0.00
产品型号
永磁交流伺服电机的工作原理与编码器零位校正方法
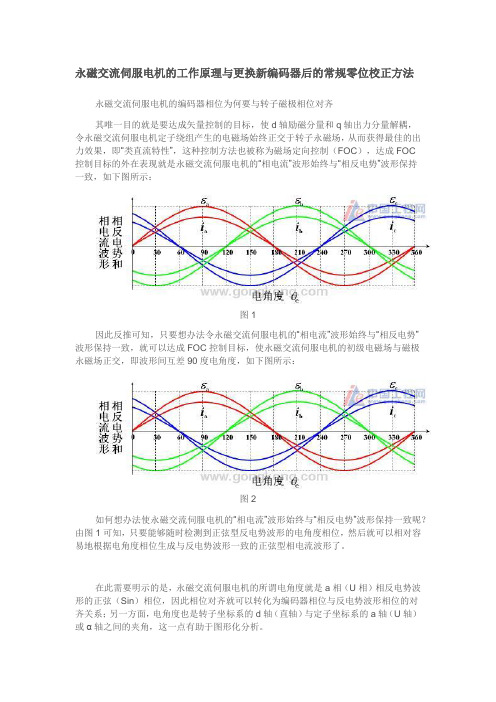
永磁交流伺服电机的工作原理与更换新编码器后的常规零位校正方法永磁交流伺服电机的编码器相位为何要与转子磁极相位对齐其唯一目的就是要达成矢量控制的目标,使d轴励磁分量和q轴出力分量解耦,令永磁交流伺服电机定子绕组产生的电磁场始终正交于转子永磁场,从而获得最佳的出力效果,即“类直流特性”,这种控制方法也被称为磁场定向控制(FOC),达成FOC控制目标的外在表现就是永磁交流伺服电机的“相电流”波形始终与“相反电势”波形保持一致,如下图所示:图1因此反推可知,只要想办法令永磁交流伺服电机的“相电流”波形始终与“相反电势”波形保持一致,就可以达成FOC控制目标,使永磁交流伺服电机的初级电磁场与磁极永磁场正交,即波形间互差90度电角度,如下图所示:图2如何想办法使永磁交流伺服电机的“相电流”波形始终与“相反电势”波形保持一致呢?由图1可知,只要能够随时检测到正弦型反电势波形的电角度相位,然后就可以相对容易地根据电角度相位生成与反电势波形一致的正弦型相电流波形了。
在此需要明示的是,永磁交流伺服电机的所谓电角度就是a相(U相)相反电势波形的正弦(Sin)相位,因此相位对齐就可以转化为编码器相位与反电势波形相位的对齐关系;另一方面,电角度也是转子坐标系的d轴(直轴)与定子坐标系的a轴(U轴)或α轴之间的夹角,这一点有助于图形化分析。
在实际操作中,欧美厂商习惯于采用给电机的绕组通以小于额定电流的直流电流使电机转子定向的方法来对齐编码器和转子磁极的相位。
当电机的绕组通入小于额定电流的直流电流时,在无外力条件下,初级电磁场与磁极永磁场相互作用,会相互吸引并定位至互差0度相位的平衡位置上,如下图所示:图3对比上面的图3和图2可见,虽然a相(U相)绕组(红色)的位置同处于电磁场波形的峰值中心(特定角度),但FOC控制下,a相(U相)中心与永磁体的q轴对齐;而空载定向时,a相(U相)中心却与d轴对齐。
也就是说相对于初级(定子)绕组而言,次级(转子)磁体坐标系的d轴在空载定向时有会左移90度电角度,与FOC 控制下q轴的原有位置重合,这样就实现了转子空载定向时a轴(U轴)或α轴与d轴间的对齐关系。
伺服电机控制板原理图(最全)word资料
1 2 3 4 P0R11302 P0R14502 P0D2701 1 P0R10902 P0U2102 A P0C9501 P0C9502 P0T201 P0U2101 2 1 T2 R113 R145 R87 R91 P0R13701 P0R11301 P0C9002 P0C9001 P0C9101 P0C9102 P0R14501 P0D3002 P0D2702 4P0U2104 AC 3P0U2103 V- R137P0C10202 P0C10201 P0R13702 P0R13002 3 P0D3001 P0R12001 P0C10302 P0C10301 P0R12002 P0D3202 P0C10702 P0C10701 C102 C103 u1620 C107 P0C10602P0C10601 P0R9502 P0D3201 P0T203 9 D30 R120 D32 2 P0T202 C90 220uFP0R10901 U21 GBU1010 AC V+ D27 R109 C95 P0R8701 P0R8702 C85 P0C8501P0C8502 P0R9102 A C91 P0R9101 D39 L3 P0L302 P0L301 P0D3901 P0D3902P0T209 D28 P0D2801 P0D2802 P0TP33 TP33 P0R13001 R95 D38 P0D3802 P0D3801 P0C9602 P0C9601 P0C9802 P0C9801 P0R10702 P0R9501 R130 P0R13402 4 P0T204 10 P0T2021 4 P0S203 3 P0S204 C106 C96 C98 R107 P0C8702 P0C8701 OUT 15VP0TP39 TP39 C87 P0R13401 P0TP41 TP41 5 S2 P0R10701 R134 1N4148 U32P0C10002 P0C10001 P0U3202 P0T205 P0R15102 P0TP38 TP38 1 2 P0S202 P0S201P0R13102 6 P0T206 P0R13502 P0R13101 R135 5 N0U3403 U34.3 P0R14002P0R13501 R139 P0R13901 P0R13902 P0Q1502 P0U3105 3 P0Q1503 P0R15002UC3842AD1 R140 P0C10402 P0C10401 D33 P0D3302 P0D3301 P0R14001 P0R15001 P0R13601 P0R13602 P0R14601 P0R17902 P0R17802 P0R17702 P0R17602 P0R14102 P0R14101 C104 P0R17901 P0R17801 P0R17701 P0R17601 P0R14602 R179 R178R177 R176 R175 R133 P0R13301 P0R13302 C U34 P0U3404 P0U3401 P0R17502R146 P0R17501 R141 P0R15201 R136 R150 P0R15202 GND Q15 1 P0Q1501 20N60 2 4 2 3 RT/CT P0U3102 VFB P0U3103 I SEN P0U3104 VCC P0U3107 7 C94 P0C9401 P0C9402 C108 P0C10801 P0C10802 P0R15101 R131 C99 U31 D29 P0D2902 P0D2901 3 R151 P0U3203 B P0C9901 P0C9902 OUT GND P0C10102 P0C10101 1P0U3201 IN 2 R106 P0R10602 P0R10601 C100 C101 B P0TP40 TP40 1 COMP P0U3108 8 V REFP0U3106 6 OUT P0U3101 R152 C P0U3403 P0U3402 P0Q903 Optoisolator1P0C10501P0C10502 3 C105 K Q9 VREF P0Q901 A D Title P0R14901 2 P0Q902P0R14902 1 R149 T21 of Power source.SchDoc Size A4 Date: File: 1 2 3 2021-5-24 Sheet of D:\Program Files\..\T21 of Power source.SchDoc By: Drawn 4 Number Revision D任务六伺服电机多点定位控制系统教学设计课程名称电力系统电气控制与PLC应用学习主题伺服电机多点定位控制授课专业电力系统自动化技术主讲教师赵慧娴学情分析伺服电机的多点定位控制是在单点定位的基础上增加上位机控制,上位机的可视化编程方法与触摸屏类似,所以这一任务的难度不大。
伺服编码器原理
伺服编码器原理
伺服编码器是一种测量旋转角度的装置,主要用于电机控制系统中,用来反馈电机的转速和位置信息。
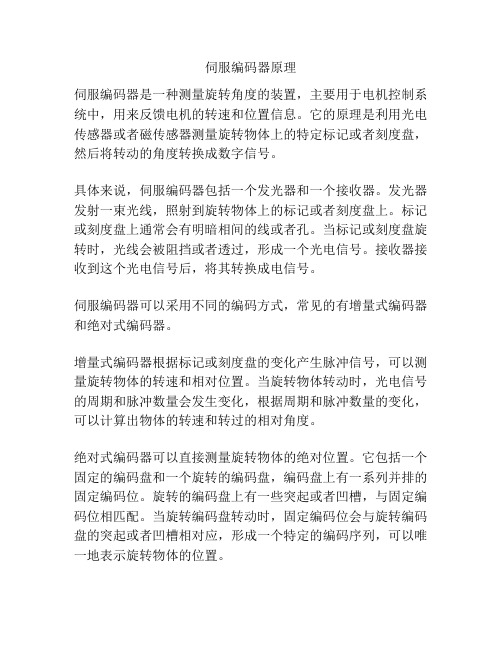
它的原理是利用光电传感器或者磁传感器测量旋转物体上的特定标记或者刻度盘,然后将转动的角度转换成数字信号。
具体来说,伺服编码器包括一个发光器和一个接收器。
发光器发射一束光线,照射到旋转物体上的标记或者刻度盘上。
标记或刻度盘上通常会有明暗相间的线或者孔。
当标记或刻度盘旋转时,光线会被阻挡或者透过,形成一个光电信号。
接收器接收到这个光电信号后,将其转换成电信号。
伺服编码器可以采用不同的编码方式,常见的有增量式编码器和绝对式编码器。
增量式编码器根据标记或刻度盘的变化产生脉冲信号,可以测量旋转物体的转速和相对位置。
当旋转物体转动时,光电信号的周期和脉冲数量会发生变化,根据周期和脉冲数量的变化,可以计算出物体的转速和转过的相对角度。
绝对式编码器可以直接测量旋转物体的绝对位置。
它包括一个固定的编码盘和一个旋转的编码盘,编码盘上有一系列并排的固定编码位。
旋转的编码盘上有一些突起或者凹槽,与固定编码位相匹配。
当旋转编码盘转动时,固定编码位会与旋转编码盘的突起或者凹槽相对应,形成一个特定的编码序列,可以唯一地表示旋转物体的位置。
通过伺服编码器提供的转速和位置信息,控制系统可以根据需求调整电机的运行方式和工作参数,实现精确的位置控制和速度控制。
一个文档让你看懂伺服电机工作原理图
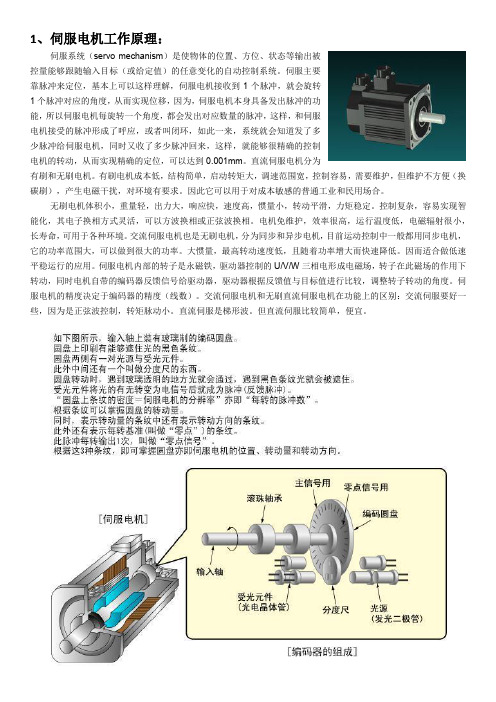
1、伺服电机工作原理:伺服系统(servo mechanism)是使物体的位置、方位、状态等输出被控量能够跟随输入目标(或给定值)的任意变化的自动控制系统。
伺服主要靠脉冲来定位,基本上可以这样理解,伺服电机接收到1个脉冲,就会旋转1个脉冲对应的角度,从而实现位移,因为,伺服电机本身具备发出脉冲的功能,所以伺服电机每旋转一个角度,都会发出对应数量的脉冲,这样,和伺服电机接受的脉冲形成了呼应,或者叫闭环,如此一来,系统就会知道发了多少脉冲给伺服电机,同时又收了多少脉冲回来,这样,就能够很精确的控制电机的转动,从而实现精确的定位,可以达到0.001mm。
直流伺服电机分为有刷和无刷电机。
有刷电机成本低,结构简单,启动转矩大,调速范围宽,控制容易,需要维护,但维护不方便(换碳刷),产生电磁干扰,对环境有要求。
因此它可以用于对成本敏感的普通工业和民用场合。
无刷电机体积小,重量轻,出力大,响应快,速度高,惯量小,转动平滑,力矩稳定。
控制复杂,容易实现智能化,其电子换相方式灵活,可以方波换相或正弦波换相。
电机免维护,效率很高,运行温度低,电磁辐射很小,长寿命,可用于各种环境。
交流伺服电机也是无刷电机,分为同步和异步电机,目前运动控制中一般都用同步电机,它的功率范围大,可以做到很大的功率。
大惯量,最高转动速度低,且随着功率增大而快速降低。
因而适合做低速平稳运行的应用。
伺服电机内部的转子是永磁铁,驱动器控制的U/V/W三相电形成电磁场,转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度。
伺服电机的精度决定于编码器的精度(线数)。
交流伺服电机和无刷直流伺服电机在功能上的区别:交流伺服要好一些,因为是正弦波控制,转矩脉动小。
直流伺服是梯形波。
但直流伺服比较简单,便宜。
2、伺服电机内部结构详图3、交流伺服电机工作驱动4、伺服电机应用:。
伺服驱动器接线原理图
编码器A-输入
A-
与伺服电机光电编码器A-相连接
CN1-23
编码器B+输入
B+
Type4
与伺服电机光电编码器B+相连接
CN2-11
编码器B-输入
B-
与伺服电机光电编码器B-相连接
CN2-22
编码器Z+输入
Z+
Type4
与伺服电机光电编码器Z+相连接
CN2-10
编码器Z-输入
Z-
与伺服电机光电编码器Z-相连接
CN2-12
模拟量输入端
Vin
Type4
S
外部模拟速度指令输入端子,单端方式,输入阻抗10千欧姆,输入范围-10V~+10V。
CN2-13
模拟量输入地
Vingnd
模拟输入的地线。
CN2-1
伺服准备好输出
SRDY
Type2
P,S
伺服准备好输出端子
SRDY ON:控制电源和主电源正常,驱动器没有报警,伺服准备好输出ON
CN2-20
指令脉冲禁止
INH
Type1
P
位置指令脉冲禁止输入端子
INH ON:指令脉冲输入禁止
INH OFF:指令脉冲输入有效
CN2-21
伺服使能
SON
Type1
P,S
伺服使能输入端子
SON ON:允许驱动器工作
SON OFF:驱动器关闭,停止工作
电机处于自由状态
注1:当从SON OFF打到SON ON前,电机必须是静止的
CN1-21
编码器U+输入
U+
Type4
与伺服电机光电编码器U+相连接
CN1-9
编码器U-输入
伺服电机编码器工作原理
伺服电机编码器工作原理Working Principle of Servo Motor Encoder。
A servo motor encoder is an essential component of a servo motor system. It provides feedback to the control system, enabling precise control of the motor's position, speed, and direction. In this article, we will discuss the working principle of a servo motor encoder and its role in the servo motor system.What is a Servo Motor Encoder?A servo motor encoder is a sensor that measures the position and speed of a servo motor's rotor. It consists of a disc with evenly spaced slots or marks, and a sensor that detects the slots or marks as the disc rotates. The sensor generates a signal that is proportional to the position and speed of the rotor. This signal is then sent to the control system, which uses it to adjust the motor's output to achieve the desired position, speed, and direction.Working Principle of Servo Motor Encoder。
伺服电机编码器的类型
伺服电机编码器的类型
伺服电机编码器可分为光学式、磁式、感应式和电容式,根据其刻度方法及信号输出形式,可分为增量式、当然式以及混合式三种。
1、增量式编码器
增量式编码器是直接利用光电转换原理输出三组方波脉冲A、B和Z相;A、B两组脉冲相位差90。
从而可方便的判断出旋转方向,而Z相为每转一个脉冲,用于基准点定位。
2、当然式编码器
当然式编码器是直接输出数字的传感器,在它的圆形码盘上沿径向有若干同心码盘,每条道上有透光和不透光的扇形区相间组成,相邻码道的扇区数目是双倍关系,码盘上的码道数是它的二进制数码的位数,在码盘的一侧是光源,另一侧对应每一码道有一光敏元件,当码盘处于不同位置时,各光敏元件根据受光照与否转换出相应的电平信号,形成二进制数。
3、混合式当然编码器
混合式当然编码器,它输出两组信息,一组信息用于检测磁极位置,带有当然信息功能;另一组则完全同增量式编码器的输出信息。
永磁交流伺服电机的工作原理与编码器零位校正方法

永磁交流伺服电机的工作原理与编码器零位校正方法工作过程如下:1.控制器将交流电源的电能转换为恒定大小和频率的交流电信号。
2.控制器将这些电信号传输到电动机的定子线圈,激励线圈形成一个旋转的磁场。
3.控制器还会测量电机的角度位置,这通常通过编码器来实现。
4.电动机的转子线圈中的永磁体由于电流感应而产生旋转力矩,从而引起电动机转动。
5.控制器不断测量电机的实际角度位置,并与目标位置进行比较,通过调整驱动信号的幅值和相位,来实现电机的运动和位置控制。
编码器是一种用于测量电机转动角度和速度的设备。
编码器通常安装在电动机的输出轴上,与电动机的转子一起旋转。
编码器的零位校正是为了准确地确定电机的角度位置,确保控制器可以对电机的旋转进行精确的控制。
常见的编码器零位校正方法有以下几种:1.软件校准:控制器通过读取编码器输出的信号,在电机转动到一个已知的参考位置时,记录下此时编码器输出的数值作为零位。
通过软件调整编码器输出的数值,以便与实际的零点位置对应。
2.机械校准:可以通过对编码器和电动机输出轴之间的机械连接进行调整,来实现编码器的零位校正。
盘算函数法,是通过标定编码器输出信号与电动机转动之间的关系。
3.光电开关校准:在电机的旋转轴上安装一个光电开关,当电机旋转到一个已知的位置时,光电开关会触发一个信号。
控制器通过检测到这个信号,记录下此时编码器输出的数值作为零位。
在实际应用中,通常会综合以上多种方法进行编码器的零位校正,以确保更高的精度和可靠性。
总之,永磁交流伺服电机的工作原理是基于电磁感应效应,通过控制电机的定子线圈和转子线圈之间的电磁场来实现转矩产生和运动控制。
编码器的零位校正方法是为了确保电机的角度位置控制的精确性。