SIMULINK及闭环系统仿真
双闭环直流电机调速系统的SIMULINK仿真实验
双闭环直流电机调速系统的SIMULINK仿真实验魏小景张晓娇刘姣(自动化0602班)摘要:采用工程设计方法对双闭环直流调速系统进行设计,选择调节器结构,进行参数的计算和校验;给出系统动态结构图,建立起动、抗负载扰动的Matlab Simulink 仿真模型.分析系统起动的转速和电流的仿真波形 ,并进行调试 ,使双闭环直流调速系统趋于合理与完善。
关键词:双闭环调速系统;调节器;Matlab Simulink建模仿真1.引言双闭环直流调速系统是目前直流调速系统中的主流设备,具有调速范围宽、平稳性好、稳速精度高等优点,在理论和实践方面都是比较成熟的系统,在拖动领域中发挥着极其重要的作用。
由于直流电机双闭环调速是各种电机调速系统的基础,直流电机双闭环调速系统的工程设计主要是设计两个调节器。
调节器的设计一般包括两个方面:第一选择调节器的结构,以确保系统稳定,同时满足所需的稳态精度. 第二选择调节器的参数,以满足动态性能指标。
本文就直流电机调速进行了较系统的研究,从直流电机的基本特性到单闭环调速系统,然后进行双闭环直流电机设计方法研究,最后用实际系统进行工程设计,并采用Matlab/Sim-ulink进行仿真。
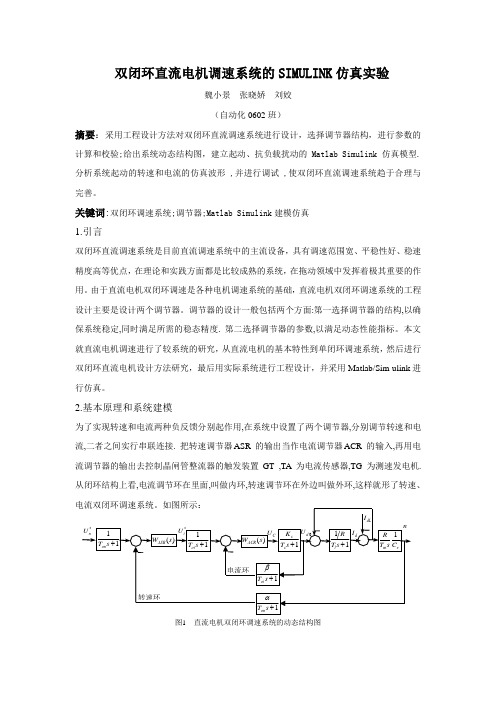
2.基本原理和系统建模为了实现转速和电流两种负反馈分别起作用,在系统中设置了两个调节器,分别调节转速和电流,二者之间实行串联连接. 把转速调节器ASR 的输出当作电流调节器ACR 的输入,再用电流调节器的输出去控制晶闸管整流器的触发装置GT ,TA为电流传感器,TG 为测速发电机. 从闭环结构上看,电流调节环在里面,叫做内环,转速调节环在外边叫做外环,这样就形了转速、图1 直流电机双闭环调速系统的动态结构图3.系统设计调速系统的基本数据如下:晶闸管三相桥式全控整流电路供电的双闭环直流调速系统, 系统参数:直流电动机:220,13.6,1480/m in,0.131/(/m in)e V A r C V r =,允许过载倍数1.5λ=;晶闸管装置:76s K =;电枢回路总电阻: 6.58R =Ω;时间常数:0.018l T s =,0.25m T s =;反馈系数:0.00337/(/min)V r α=,0.4/V A β=;反馈滤波时间常数:0.005oi T s =,0.005on T s =。
复杂联接的闭环系统的数字仿真

复杂联接的闭环系统的数字仿真班级:2008级电牵一班姓名:** 班号:**摘要:实际工程中常常给出的是结构框图形式的控制系统数学模型,对此类型形式的系统进行仿真分析,主要是根据“二次模型”编写适当的程序语句,使之能自动求解各个环节变量的动态变化情况,从而得到关于系统输出各变量的有关数据、曲线等。
以对系统进行性能分析和设计。
关键字:数字仿真系统结构图Simulink建模与仿真目录引言-------------------------------------------------------------------------------3第一章复杂联接的闭环系统的编程仿真-------------------41.1典型环节的二次模型------------------------------41.2系统的连接矩阵----------------------------------51.3系统的求解--------------------------------------61.4程序框图----------------------------------------71.5复杂闭环闭环系统的程序实现----------------------9第二章复杂联接的闭环闭环系统的simulink仿真----------142.1仿真模型的建立---------------------------------142.2仿真波形---------------------------------------15第三章仿真结果分析-----------------------------------17第四章simulink仿真与程序仿真的比较-------------------18第五章心得体会---------------------------------------19第六章参考文献---------------------------------------20引言控制系统仿真是控制工程领域进行科学研究和控制器设计所采取的重要方法之一。
基于simulink的双闭环直流调速系统设计

基于simulink的双闭环直流调速系统设计摘要:研究了双闭环直流调速系统的结构。
根据系统结构,按照由内到外的顺序分别设计电流调节器和转速调节器。
为使系统无静差,两个调节器均选为PI调节器。
在用simulink仿真的过程中,对调节器参数进行了整定,使系统达到稳定状态。
通过仿真曲线,说明了设计的合理性。
关键词:双闭环直流调速;PI调节器;参数整定;simulink 直流调速系统调速范围广、静差率小、稳定性好以及具有良好的动态性能,在高性能的拖动技术领域中,相当长时期内几乎都采用直流电力拖动系统。
现在直流调速理论发展得比较成熟,但要真正设计好一个双闭环调速系统并应用于工程设计却有一定的难度。
本文基于simulink对双闭环直流调速系统进行设计与仿真,合理选择电流调节器和转速调节器的结构,调整调节器的参数,使系统达到设计要求,对电流、转速调节器的参数进行了整定。
本设计是在参数整定的基础上得到仿真曲线,并列出多组数据进行说明。
1.系统设计根据设计多环控制系统的一般原则进行系统设计:从内环开始,一环一环地逐步向外扩展。
先从电流环入手,首先设计好电流调节器,然后把整个电流环看做转速调节系统的一个环节,再设计转速调节器。
稳态指标的要求:系统无静差。
动态指标的要求:空载启动到额定转速时的转速超调量σn≤10%,电流超调量σi≤5%。
2.双闭环直流调速系统的结构带有电流、转速反馈的双闭环调速系统实属多闭环系统,一般采用由内到外一环包一环的形式,内环为电流环,设有电流调节器ACR,外环为转速环,设有转速调节器ASR,构成一个完整的闭环系统。
电流环接受速度环的输出作为控制目标,调节电动机的电流以满足既能控制电动机以较快的速度跟踪参考速度,又不至于产生过流现象损坏电动机,这种结构为工程设计以及调试工作带来相当大的方便。
双闭环直流调速系统结构图如图1所示。
图1中,给定电压U*n=10V,晶闸管放大系数Ks=40,晶闸管失控时间Ts=0.0017s,电枢回路总电阻R=0.5Ω,电磁时间常数Tl=0.03s,机电时间常数Tm=0.18s,电动势常数Ce=0.132V·min/r,转速反馈系数α=0.007V·r/min,电流反馈系数β=0.083V·r/min。
第五章 SIMULINK仿真基础

设置仿真参数
28
1.解题器(Solver)选项
(1)Simulation time组:设置仿真起止时间。
(2)Solve options组:选择求解器,并为其
指定参数。
– 变步长算法(Variable-step) – 固定步长算法(Fixed-step)。
29
2.数据输入输出选项(Data Import/Export)
6
SIMULINK仿真基础
在工程实际中,控制系统的结构往往很复
杂,如果不借助专用的系统建模软件,则 很难准确地把一个控制系统的复杂模型输 入计算机,对其进行进一步的分析与仿真。
1990年MathWorks公司为MATLAB增加了 用于建立系统框图和仿真的环境 1992年公司将该软件改名为SIMULINK
– None:不做任何反应。 – Warning:提出警告,但警告信息不影响程序的运行。 – Error:提示错误,运行的程序停止。
31
观察Simulink的仿真结果
观察仿真结果的方法有以下几种:
– 将仿真结果信号输入到输出模块“Scope”示波
器、“XY Graph”二维X-Y图形显示器与
“Display”数字显示器中,直接查看。 – 将仿真结果信号输入到“To Workspace”模块中, 再用绘图命令在MATLAB命令窗口里绘制出图形。 – 将仿真结果信号返回到MATLAB命令窗口里,再 利用绘图命令绘制出图形。
25
第二节 SIMULINK功能模块的处理
基本操作包括: 1. 选取模块 2. 复制与删除模块 3. 模块的参数和属性设置 4. 模块外形的调整 5. 模块名的处理 6. 模块的连接 7. 在连线上反映信息
26
利用Simulink仿真直流伺服电机的闭环位置控制系统

利用Simulink 仿真直流伺服电机的闭环位置控制系统 一直流伺服电机传递函数及参数选择直流电机的工作转矩等于负载转矩与负载惯性系统加、减速转矩之和,表达式为: 1()()()()L a d t M t M t J J dtω=++。
其中,()M t 为电动机输出转矩,N m ⋅;()L M t 为负载转矩,N m ⋅;()t ω为电动机角速度,1rad s -⋅;a J 为电动机电枢转动惯量,322.210a J kg m -=⨯⋅;1J 为负载的转动惯量,需将移动工作台的惯性转换到电机轴上,取2321()510,2z h J m kg m π-=⋅≈⨯⋅h 为丝杠螺距,z m 为工作台质量。
电机电路处于动态过程时,对线圈施加的电源电压()a u t 和电枢线圈内通过的电流()a i t 的关系为:()()()()()a a a a ab di t u t R i t L e t d t =++。
其中,a R 为电机电枢线圈内阻,a R =20Ω;a L 为电机电枢线圈的电感,a L =2H ;()b e t 为电机电枢线圈在定子磁场中运动时产生的反电动势。
电机输出转矩()M t 应与通过电枢线圈的电流大小成正比,则()()T a M t K i t =。
其中,T K 为电机输出扭矩常数,T K =15N m A -⋅⋅。
电机电枢线圈产生的反电动势()b e t 与电枢的工作角速度()t ω成正比,故有:()()b b e t K t ω=。
其中,b K 为电机电枢反电动势系数,10.0498b K V rad -=⋅。
我们分别将上述的算式进行拉普拉斯变换,并令初始条件为零,则有:1()()()()L a M s M s J J s s =++Ω;()()()()a a a a b U s R sL I s E s =++;()()T a M s K I s =;()()b b E s K s =Ω。
基于simulink的转速负反馈闭环调速系统仿真
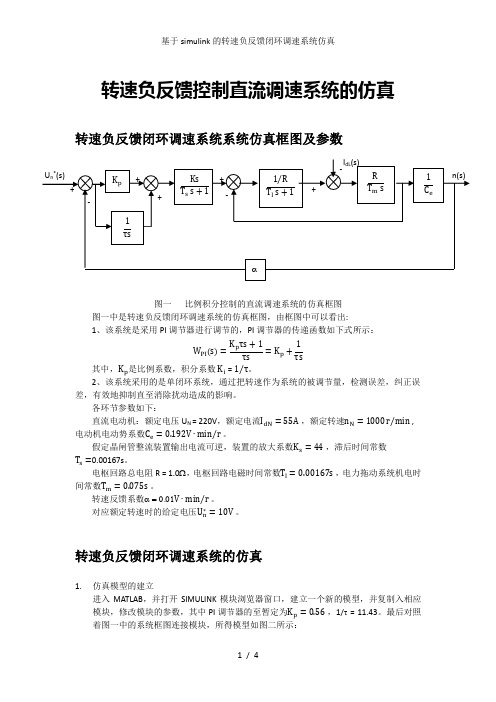
转速负反馈控制直流调速系统的仿真转速负反馈闭环调速系统系统仿真框图及参数图一 比例积分控制的直流调速系统的仿真框图图一中是转速负反馈闭环调速系统的仿真框图,由框图中可以看出:1、该系统是采用PI 调节器进行调节的,PI 调节器的传递函数如下式所示: W PI (s )=K p τs +1τs =K p +1τs其中,K p 是比例系数,积分系数 K i = 1τ⁄。
2、该系统采用的是单闭环系统,通过把转速作为系统的被调节量,检测误差,纠正误差,有效地抑制直至消除扰动造成的影响。
各环节参数如下:直流电动机:额定电压U N = 220V ,额定电流I dN =55A ,额定转速n N =1000r min ⁄ ,电动机电动势系数C e =0.192V ∙min r ⁄。
假定晶闸管整流装置输出电流可逆,装置的放大系数K s =44 ,滞后时间常数T s =0.00167s 。
电枢回路总电阻R = 1.0Ω,电枢回路电磁时间常数T l =0.00167s ,电力拖动系统机电时间常数T m =0.075s 。
转速反馈系数α = 0.01V ∙min r ⁄ 。
对应额定转速时的给定电压U n ∗=10V 。
转速负反馈闭环调速系统的仿真1. 仿真模型的建立进入MATLAB ,并打开SIMULINK 模块浏览器窗口,建立一个新的模型,并复制入相应模块,修改模块的参数,其中PI 调节器的至暂定为K p =0.56 ,1/τ = 11.43。
最后对照着图一中的系统框图连接模块,所得模型如图二所示:图二比例积分控制的直流调速系统的仿真模型2.仿真模型的运行启动仿真过程,得到的仿真结果如图三,图四所示:图三scope输出结果图四scope1输出结果其中,由图三scope输出结果中可以得出该控制系统的最大超调量M p、上升时间t r、调整时间t s,取值分别为:M p = 108r/min, t r= 0.12s, t s= 0.28s(估计值)3.PI调节器参数的调整改变PI调节器的参数,并在启动仿真,分别从仿真曲线中得到的最大超调量及调整时间,相互间进行比较,如下表所示比例系数K p积分系数 K i最大超调量调整时间t s(s)M p(r/min)0.25 3 0 >0.60.56 3 0 >0.60.56 11.43 108 0.280.8 11.43 63 0.280.8 15 152 0.23由表中可以看出,改变PI调节器的参数,可以得到转速响应的超调量不一样、调节时间不一样的响应曲线。
实验三 转速负反馈闭环调速系统的仿真

实验三转速负反馈闭环调速系统的仿真一.实验目的熟练使用MATLAB下的SIMULINK软件进行系统仿真。
学会用MATLAB下的SIMULINK软件建立比例积分控制的直流调速系统的仿真模型和进行仿真实验的方法。
二.实验器材PC机一台,MATLAB软件三.实验参数采用比例积分控制的转速负反馈直流调速系统,结构框图参考教材P51的图2-45,其各环节的参数如下:直流电动机:额定电压UN = 220 V,额定电流IdN = 55 A,额定转速nN = 1000 r/min,电动机电势系数Ce= 0.192 V·min/r。
假定晶闸管整流装置输出电流可逆,装置的放大系数Ks = 44,滞后时间常数Ts = 0.00167 s。
电枢回路总电阻R =1.0 Ω,电枢回路电磁时间常数Tl = 0.00167 s,电力拖动系统机电时间常数Tm = 0.075 s。
转速反馈系数α= 0.01V·min/r。
对应额定转速时的给定电压Un*=10V。
电流负反馈采样电阻Rs = 0.1 Ω,临界截止电流Idcr=1.3IdN,比较电压Ucom = Idcr Rs。
四.实验内容1、根据所提供的系统参数,参考教材P51中图2-45建立采用比例积分控制的转速闭环调速系统的仿真模型。
图1比例积分控制的直流调速系统仿真图2、在理想空载下,改变比例积分控制器的比例系数K p 和积分系数K i (如表1所示),观察调速系统输出转速n 的响应曲线,记录转速的超调量、响应时间、稳态值等参数,以及电枢电流I d 的响应曲线,记录相关数据,并分析原因。
表1 比例积分系数表1不同比例系数K p 和积分系数K i 时的转速数据对比t/sn (r /m i n )不同比例系数Kp 和积分系数Ki 的转速n 曲线t/sI d /A不同比例系数Kp 和积分系数Ki 的电枢电流Id 曲线表2不同比例系数K p和积分系数K i时的电枢电流数据对比通过表1、2可得,当K p0.25,K i=3时,在响应阶段中转速变化比较慢且无超调,其稳态值999.55r/min,并且电枢电流比较小,波动范围也比较窄;当K p=0.56,Ki=11.43时,在响应阶段中转速变化比较快,其稳态值达到1000r/min,并且电枢电流较大,波动范围稍大一点,响应时间较短,约为0.26s;当Kp=0.8,Ki=15时,响应阶段中转速变化快,其稳态值达到1000r/min,响应时间短,约为0.2s,电枢电流大,波动范围大。
单闭环直流电机调速Simulink仿真
直流调速系统及其仿真
首先,我先大致讲一下电机调速的基本原理:
01()d d n a U E I R R R =+++(1)
e e E C n K n ==Φ(2)
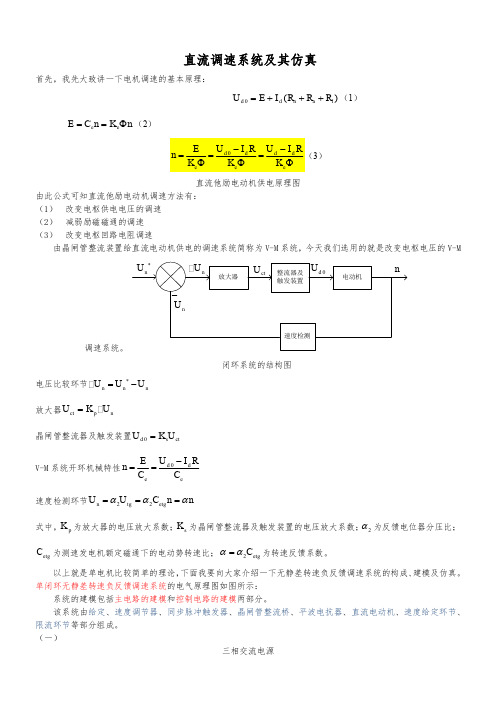
3) 直流他励电动机供电原理图 (1) (2) (3) V-M
n U n n U U =放大器p n U K U
晶闸管整流器及触发装置U V-M 式中,p K 为放大器的电压放大系数;s K 为晶闸管整流器及触发装置的电压放大系数;
2α为反馈电位器分压比;etg C 为测速发电机额定磁通下的电动势转速比;2etg C αα=为转速反馈系数。
以上就是单电机比较简单的理论,下面我要向大家介绍一下无静差转速负反馈调速系统的构成、建模及仿真。
单闭环无静差转速负反馈调速系统的电气原理图如图所示:
系统的建模包括主电路的建模和控制电路的建模两部分。
该系统由给定、速度调节器、同步脉冲触发器、晶闸管整流桥、平波电抗器、直流电动机、速度给定环节、限流环节等部分组成。
(一)
三相交流电源
A 超前C120度,C 超前B120度。
同步脉冲触发器和封装之后的子系统符号
六脉冲触发器需要用三相线电压同步,所以同步电源的任务是将三相交流电源的相电压转换成线电压。
图中
触发器开关信号block 为0时,开放触发器;为1时,封锁触发器。
晶闸管整流桥及其参数设置
直流电机模块
PID 模块及其参数设置
PI 的控制器可以通过现有的PID 模块进行设置。
限幅器模块及其参数设置
通过对ct U 参数变化范围的探索而知:在单闭环无静差系统中,当ct U 在110~207范围内变化时,同步脉冲
为样。
(二)
(三)。
MATLABSimulink和控制系统仿真实验报告
MATLAB/Simulink与控制系统仿真实验报告姓名:喻彬彬学号:K031541725实验1、MATLAB/Simulink 仿真基础及控制系统模型的建立一、实验目的1、掌握MATLAB/Simulink 仿真的基本知识;2、熟练应用MATLAB 软件建立控制系统模型。
二、实验设备电脑一台;MATLAB 仿真软件一个三、实验内容1、熟悉MATLAB/Smulink 仿真软件。
2、一个单位负反馈二阶系统,其开环传递函数为210()3G s s s =+。
用Simulink 建立该控制系统模型,用示波器观察模型的阶跃响应曲线,并将阶跃响应曲线导入到MATLAB 的工作空间中,在命令窗口绘制该模型的阶跃响应曲线。
3、某控制系统的传递函数为()()()1()Y s G s X s G s =+,其中250()23s G s s s+=+。
用Simulink 建立该控制系统模型,用示波器观察模型的阶跃响应曲线,并将阶跃响应曲线导入到MATLAB 的工作空间中,在命令窗口绘制该模型的阶跃响应曲线。
4、一闭环系统结构如图所示,其中系统前向通道的传递函数为320.520()0.11220s G s s s s s+=+++,而且前向通道有一个[-0.2,0.5]的限幅环节,图中用N 表示,反馈通道的增益为1.5,系统为负反馈,阶跃输入经1.5倍的增益作用到系统。
用Simulink 建立该控制系统模型,用示波器观察模型的阶跃响应曲线,并将阶跃响应曲线导入到MATLAB 的工作空间中,在命令窗口绘制该模型的阶跃响应曲线。
四、实验报告要求实验报告撰写应包括实验名称、实验内容、实验要求、实验步骤、实验结果及分析和实验体会。
五、实验思考题总结仿真模型构建及调试过程中的心得体会。
题1、(1)利用Simulink的Library窗口中的【File】→【New】,打开一个新的模型窗口。
(2)分别从信号源库(Sourse)、输出方式库(Sink)、数学运算库(Math)、连续系统库(Continuous)中,用鼠标把阶跃信号发生器(Step)、示波器(Scope)、传递函数(Transfern Fcn)和相加器(Sum)4个标准功能模块选中,并将其拖至模型窗口。
控制系统仿真实验六simulink
实验六:Simulin建模与仿真一、实验目的1、掌握Simulink建模与仿真的基本方法。
2、熟悉Simulink基本模块库及主要元件的使用方法。
二、实验学时:4学时三、实验原理:1、Simulink 仿真过程在已知系统数学模型或系统框图的情况下,利用Simulink进行建模仿真的基本步骤如下。
(1)启动Simulink,打开Simulink库浏览器。
(2)建立空白模型窗口。
(3)由控制系统数学模型或结构框图建立Simulink仿真模型。
(4)设置仿真参数,运行仿真。
(5)输出仿真结果。
2、Simulink建模与仿真基本方法根据给定的数学模型或控制系统框图,可建立Simulink仿真模型。
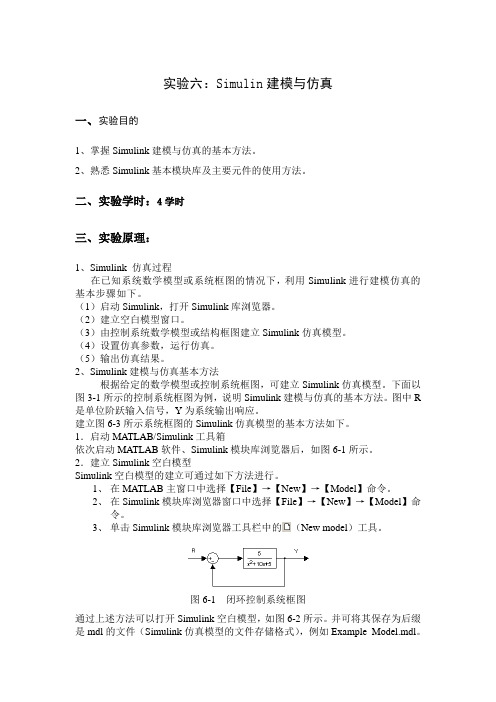
下面以图3-1所示的控制系统框图为例,说明Simulink建模与仿真的基本方法。
图中R 是单位阶跃输入信号,Y为系统输出响应。
建立图6-3所示系统框图的Simulink仿真模型的基本方法如下。
1.启动MATLAB/Simulink工具箱依次启动MATLAB软件、Simulink模块库浏览器后,如图6-1所示。
2.建立Simulink空白模型Simulink空白模型的建立可通过如下方法进行。
1、在MATLAB主窗口中选择【File】→【New】→【Model】命令。
2、在Simulink模块库浏览器窗口中选择【File】→【New】→【Model】命令。
3、单击Simulink模块库浏览器工具栏中的(New model)工具。
图6-1 闭环控制系统框图通过上述方法可以打开Simulink空白模型,如图6-2所示。
并可将其保存为后缀是mdl的文件(Simulink仿真模型的文件存储格式),例如Example_Model.mdl。
在保存Simulink模型文件的时候,为了实现向下兼容,MATLAB R2008/Simulink 7.1允许将模型保存为其他版本的Simulink模型。
图6-2 空白模型窗口3.根据系统框图选择模块构建Simulink仿真模型,首先需要知道所需模块所属的子模块库名称。
PID仿真实验
实验1 闭环控制系统仿真实验——PID 控制算法仿真一、实验目的1.掌握PID 控制规律及控制器实现。
2.掌握用Simulink 建立PID 控制器及构建系统模型与仿真方法。
二、实验设备计算机、MATLAB 软件 三、实验原理在模拟控制系统中,控制器中最常用的控制规律是PID 控制。
PID 控制器是一种线性控制器,它根据给定值与实际输出值构成控制偏差。
PID 控制规律写成传递函数的形式为s K sKiK s T s T K s U s E s G d p d i p ++=++==)11()()()( 式中,P K 为比例系数;i K 为积分系数;d K 为微分系数;ip i K K T =为积分时间常数;pdd K K T =为微分时间常数;简单来说,PID 控制各校正环节的作用如下:(1)比例环节:成比例地反映控制系统的偏差信号,偏差一旦产生,控制器立即产生控制作用,以减少偏差。
(2)积分环节:主要用于消除静差,提高系统的无差度。
积分作用的强弱取决于积分时间常数i T ,i T 越大,积分作用越弱,反之则越强。
(3)微分环节:反映偏差信号的变化趋势(变化速率),并能在偏差信号变得太大之前,在系统中引入一个有效的早期修正信号,从而加快系统的动作速度,减少调节时间。
四、实验过程1、在MA TLAB 命令窗口中输入“simulink ”进入仿真界面。
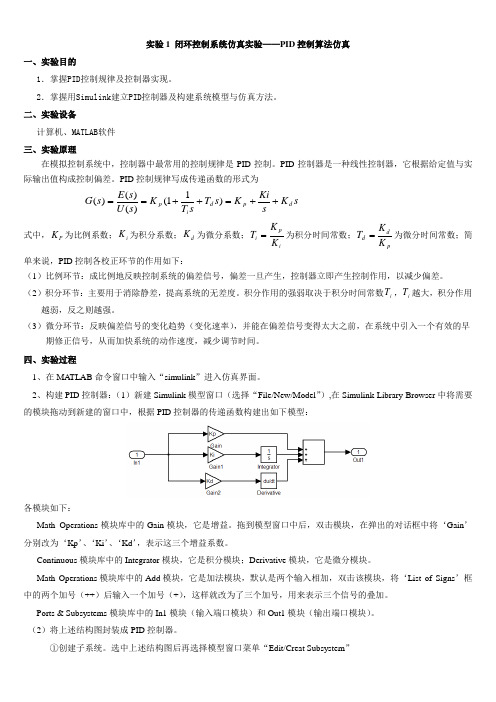
2、构建PID 控制器:(1)新建Simulink 模型窗口(选择“File/New/Model ”),在Simulink Library Browser 中将需要的模块拖动到新建的窗口中,根据PID 控制器的传递函数构建出如下模型:各模块如下:Math Operations 模块库中的Gain 模块,它是增益。
拖到模型窗口中后,双击模块,在弹出的对话框中将‘Gain ’分别改为‘Kp ’、‘Ki ’、‘Kd ’,表示这三个增益系数。
Continuous 模块库中的Integrator 模块,它是积分模块;Derivative 模块,它是微分模块。
电容式加速度计闭环控制simulink仿真源代码

电容式加速度计闭环控制Simulink仿真简介电容式加速度计是一种常见的传感器,用于测量物体在加速度下的相对位移。
闭环控制是一种自动控制方式,通过传感器测量的输出信号来调整系统的输入,使系统能够达到期望的状态。
本文将介绍如何使用Simulink进行电容式加速度计的闭环控制仿真。
原理电容式加速度计基于电容的变化来测量加速度。
当加速度发生变化时,加速度计内部的质量会移动,从而改变电容的值。
通过测量电容的变化,我们可以推算出加速度的大小。
闭环控制通过将传感器测量信号与期望输出进行比较,并根据差异来调整输入信号。
在电容式加速度计的闭环控制中,我们希望系统能够使加速度保持在期望值。
仿真步骤步骤1:创建模型首先,我们需要在Simulink中创建一个模型。
可以通过以下步骤创建一个新的模型:1.打开Simulink。
2.点击”File” -> “New” -> “Model”,或者使用快捷键Ctrl+N,创建一个新的模型。
步骤2:添加模块在模型中添加所需的模块来实现闭环控制。
对于电容式加速度计的闭环控制,我们需要添加以下模块:1.电容式加速度计传感器模块:用于模拟电容式加速度计的输出信号。
2.比较器模块:用于比较传感器输出与期望输出的差异。
3.控制器模块:根据比较器输出的差异来调整输入信号。
可以通过以下步骤添加模块:1.在Simulink模型中,右击空白处,点击”Add Block”,或者使用快捷键Ctrl+L,打开模块库。
2.在模块库中,找到所需的模块,如”Sensor”、“Comparator”和”Controller”。
3.将模块拖放到模型中,按需求进行连接。
步骤3:设置参数在仿真之前,我们需要设置模块的参数。
对于电容式加速度计的闭环控制,我们需要设置以下参数:1.传感器模块参数:设置传感器的灵敏度和噪声。
2.比较器模块参数:设置期望输出值。
3.控制器模块参数:根据比较器输出的差异来调整输入信号。
基于Simulink的抽油闭环控制系统仿真

基于Simulink的抽油闭环控制系统仿真
李静文;于佐军
【期刊名称】《石油天然气学报》
【年(卷),期】2009(31)4
【摘要】在抽油系统中常存在"大马拉小车"的现象,造成能源浪费.使用变频调速技术,动态调节电机转速,使其根据抽油机负载而变化,通过控制电机转速来控制抽油系统;分另4使用PID和模糊PID控制算法,在Simulink中进行仿真研究,取得了良好的控制效果.
【总页数】3页(P386-388)
【作者】李静文;于佐军
【作者单位】中国石油大学(华东)信息与控制工程学院,山东东营257061;中国石油大学(华东)信息与控制工程学院,山东东营257061
【正文语种】中文
【中图分类】TE931.2;TE933
【相关文献】
1.基于matlab/simulink的异步电动机双闭环控制仿真
2.基于SIMULINK的直流电动机转速闭环控制系统的仿真
3.基于AMESim与Simulink联合仿真的大吨位液压机主缸速度闭环控制
4.基于simulink的模糊自适应PID三闭环控制设计及仿真
5.基于simulink的模糊自适应PID三闭环控制设计及仿真
因版权原因,仅展示原文概要,查看原文内容请购买。
基于Simulink的液压闭环位置控制系统建模与仿真
C H E N Y o n g q i n g , X U Q i b i n ,X U X i n h e ( C o l l e g e o f Me c h a n i c a l & Ma t e r i a l , T h r e e G o r g e s U n i v e r s i t y ,Y i e h a n g H u b e i 4 4 3 0 0 2 ,C h i n a )
a n d d i f f e r e n t i a l ( P I D)c o n t r o l l e r t o i m p r o v e t h e s y s t e m p e f r o r m a n c e .T h e v a r i e t y l a w o f s y s t e m d y n a m i c p e f r o r m a n c e u n d e r d i f f e r e n t p a —
f o r a t e s t p l a t f o r m a s a s t u d y i n g o b j e c t .T h e s y s t e m t r a i t i n f r e q u e n c y d o m a i n w a s a n a l y z e d , a n d r e c t i i f e d b y t h e p r o p o r t i o n i n t e g r a t i o n
可逆PWM控制双闭环直流调速系统的Simulink仿真
直流 调 压 调 速 方 法 简 单 、易 控 制 、调 速 平 滑 性 较 好 ,并 且 在一 定条 件下 可 以获得 较宽 的调 速范 围 ,因而 在直 流调 速 系 统 中 应 用较 为 广 泛 L1 ]。而 由转 速调 节 器 (automatic speed regulator,ASR)作 为 外 环 、电 流 调节 器 (automatic current regulator,AcR)作 为 内环 组 成 的双 闭环直 流调 速 系统是 实 际工 程应用 中最典 型 的直流 调速 系统 ]。在 以前 的双 闭环 直 流 调 速 系 统
收 稿 日期 :2017—08—28 基 金 项 目:国家 自然 科 学 基 金 目(61373098)资 助 ;江 苏 省 青 蓝 工 程 资
助 项 目 和 江 苏 高 校 品 牌 专 业 建 设 工 程 资 助 项 目
PPZY 2015A 089
作者 简 介 :苏 品 刚 (1971 ),男 ,江 苏 苏 州 ,硕 士 ,副 教 授 ,主 要 研 究 方 向 为数 字 图像 处 理 和 测 控 技 术 .
苏 品 刚 ,尚 丽 。 (1.苏 州 市 职 业 大 学 电子 信 息 工程 学 院 ,江 苏 苏 州 215104; 2. 中 国科 学技 术 大 学 信 息科 学技 术 学 院 ,安 徽 合 肥 230026)
摘 要 :根 据 转 速 、电 流双 闭 环 直 流 调 速 系 统 和 脉 冲 宽 度 调 制 (PW M)技 术 原 理 ,采 用 Matlab/Simulink软 件 实 现 了基 于 H 型 PW M 可 逆 变 换 器 的双 闭环 直 流 调 速 系 统 的 仿 真 建 模 ,对 主要 仿 真 模 块 参 数 的设 置 进 行 了 讨 论 ,给 出 相 应 的 转 速 和 电枢 电 流 的仿 真 波 形 。 仿 真 结 果 验 证 了 PW M 双 环 直 流 调 速 系 统 的 理 论 分 析 结 果 , 在 课 堂 教 学 中便 于 学 生 理 解 和掌 握 ,而且 对 该 系统 在 实 际 工 程 中的 应 用 也 具 有 一 定 的 借鉴 意 义 。 关 键 词 :双 闭 环 直 流 调 速 ;可 逆 PW M 控 制 ;仿 真 实 验 ;Simulink 中图 分 类 号 :TP391 文 献 标 识 码 :A 文 章 编 号 :1002—4956(2018)02—0124—06
(完整版)三相逆变电压闭环simulink仿真

本帖最后由Qyuan_1209 于2013-10-15 01:37 编辑
版本:Matlab 2013a
前段时间,在这个论坛下载了一个三相逆变器的simulink程序。
控制比较简单,为电压单闭环仿真,当时作者用函数编写的3/2变换等,下载之后仿真过程出现问题,修改成方效果还算可以,分享如斯,供刚入门的学习分享。
模型中,LC滤波还可以优化。
解决:可以参考LC滤波器设计,好好调试一番
添加感性负载之后,会出现三相电压不平衡。
解决:添加电流闭环控制
仿真原理图如图所示
仿真过程中GUI 中的Ts 设置方法:1、原理图空白处,单击右键,选中"Model Properties"
2、在出现的窗口中,对应位置初始化TS(见图)
simulink 仿真程序见附件。
11.png(37.07 KB, 下载次数: 1773)
纯阻性负载
22.png(52.65 KB, 下载次数: 1730)仿真原理图
33.png(19.92 KB, 下载次数: 899) Ts 初始化定义。
SIMULINK及闭环系统仿真

SIMULINK练习及闭环直流调速系统仿真利用MATLAB下的SIMULINK软件和电力系统模块库(SimPowerSystems)进行系统仿真是十分简单和直观的,用户可以用图形化的方法直接建立起仿真系统的模型,并通过SIMULINK环境中的菜单直接启动系统的仿真过程,同时将结果在示波器上显示出来。
掌握了强大的SIMULINK工具后,会大大增强用户系统仿真的能力。
在教材第三章中,对工程实践中用得最多的典型Ⅰ型系统和典型II型系统的设计方法进行了详细的分析,在此基础上,利用SIMULINK软件仿真能对调节器的参数进行更为方便的调整,可以更为直观地得到系统仿真的结果,从而加深对工程设计方法的理解。
下面就以例题3-1,3-2设计的转速、电流反馈控制的直流调速系统为例,学习SIMULINK软件的运动控制系统仿真方法。
1.仿真模型的建立进入MATLAB,单击MATLAB命令窗口工具栏中的SIMULINK图标,或直接键入SIMULINK 命令,打开SIMULINK模块浏览器窗口,如图1所示。
由于版本的不同,各个版本的模块浏览器的表示形式略有不同,但不影响基本功能的使用。
图1 SIMULINK模块浏览器窗口(1)打开模型编辑窗口:通过单击SIMULINK工具栏中新模型的图标或选择File→New →Model菜单项实现。
(2)复制相关模块:双击所需子模块库图标,则可打开它,以鼠标左键选中所需的子模块,拖入模型编辑窗口。
在本例中,需要打开SimPowerSystems模块库,从Electrical Source组选中AC Voltage Source和 DC Voltage Source模块拖入模型编辑窗口,从Elements组选中Series RLC Branch和 Three-Phase Transfomer模块拖入模型编辑窗口,从Machines组选中DC Machine模块拖入模型编辑窗口,从Power Electronics组选中Universal Bridge模块拖入模型编辑窗口,从Measurements组选中Voltage Measurement模块拖入模型编辑窗口,从Connectors组选中Ground和 T Connector模块拖入模型编辑窗口需要从Simulink模块库中把Source组中的Step模块拖入模型编辑窗口;把Math组中的Sum和Gain模块拖入模型编辑窗口;把Continuous组中的Transfer Fcn模块拖入模型编辑窗口;把Sinks组中的Scope模块拖入模型编辑窗口;把Signal Rounting组中的Demux模块拖入模型编辑窗口;此外,我们还需要ASR、ACR和Pulse Generator三个子系统模块。
实验四:基于Simulink的控制系统仿真
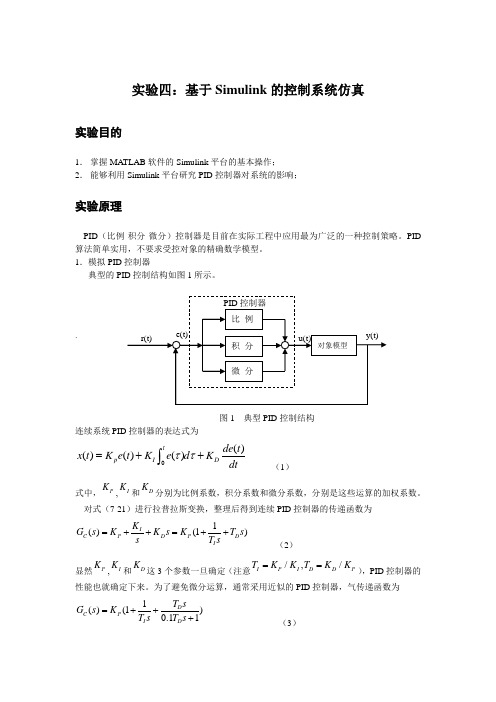
实验四:基于Simulink 的控制系统仿真实验目的1. 掌握MATLAB 软件的Simulink 平台的基本操作; 2. 能够利用Simulink 平台研究PID 控制器对系统的影响;实验原理PID (比例-积分-微分)控制器是目前在实际工程中应用最为广泛的一种控制策略。
PID 算法简单实用,不要求受控对象的精确数学模型。
1.模拟PID 控制器典型的PID 控制结构如图1所示。
`图1 典型PID 控制结构 连续系统PID 控制器的表达式为()()()()tp I Dde t x t K e t K e d K dt ττ=++⎰ (1)式中,P K ,IK 和DK 分别为比例系数,积分系数和微分系数,分别是这些运算的加权系数。
对式(7-21)进行拉普拉斯变换,整理后得到连续PID 控制器的传递函数为1()(1)I C P D P D I K G s K K s K T s s T s =++=++ (2)显然P K ,IK 和DK 这3个参数一旦确定(注意/,/I P I D D PT K K T K K ==),PID 控制器的性能也就确定下来。
为了避免微分运算,通常采用近似的PID 控制器,气传递函数为1()(1)0.11D C P I D T s G s K T s T s =+++ (3)实验过程PID 控制器的P K ,I K 和D K 这3三个参数的大小决定了PID 控制器的比例,积分和微分控制作用的强弱。
下面请通过一个直流电动机调速系统,利用MA TLAB 软件中的Simulink 平台,使用期望特性法来确定这3个参数的过程。
并且分析这3个参数分别是如何影响控制系统性能的。
【问题】某直流电动机速度控制系统如图2所示,采用PID 控制方案,使用期望特性法来确定P K ,IK 和DK 这3三个参数。
期望系统对应的闭环特征根为:-300,-300,-30+j30和-30-j30。
请建立该系统的Simulink 模型,观察其单位阶跃响应曲线,并且分析这3个参数分别对控制性能的影响。
基于SIMULINK的转速单闭环直流调速系统的仿真

管 的门极和 阴极之 间,以改变 “ 三相全控整流 ”的输出电压能交流调速技术不
断普及 ,在 许多调速要求指标不高 的场合下广泛应用 ,大有 取代直 流电机调速的势头 ,然而 ,直流调速毕竟在理论和 实 践上都 比较 成熟,而且从控制 的角度来看 ,它是交流调速 的 基础 ,交流 调速 的许多思想和方法都源 自直流调速 。为 了提 高直流调速 系统 的动静态 性能指标 ,通常采用 闭环控制系统 ( 包括单 闭环系统和 多闭环系统) 。对调速指标要求不高 的场
1 日】 l舌
直流 电动机 由于调速性能好 , 启动 、 制动和过载转矩大 , 便 于控 制等特点,是许多高性能要求的生产机械 的理想 电动
反馈信 号,经 “ 速度 变换 ”后接到 “ 速度调节器 ”的输 入端 ,
与 “ 定”的电压相 比较 经放 大后,得 到移 相控 制电压 u 给 c 用 作控 制整 流桥 的 “ 触发 电路 ” 触发脉冲经功放 后加 到晶闸 ,
这就构成 了速度 负反馈 闭环 系统。电机 的转速 随给定 电压变 化 ,电机最 高转速 由速度 调节 器的输 出限幅所 决定,速度调
节器采用 P ( 比例 )调节对 阶跃输入有稳态误差 ,要想消 除 上述误差 , 则需将 调节器换成 P ( I 比例积分) 调节 。 这时 当“ 给
定 ”恒定时 ,闭环系统对速度变化起到 了抑制作用 ,当电机
负载或 电源 电压波动 时,电机 的转速 能稳定在一定 的范 围内 变化 。系统结构示意 图如 图 卜1 所示 。
合 ,采用单 闭环 系统,而对调速指标较高的则采用多 闭环系 统 。按 反馈 的方 式不同可分为转速反馈 ,电流反馈 ,电压 反 馈等 。在单 闭环 系统 中,转速 单闭环使用较多 。 数字仿真是研究 高性 能电机控 制系统的重要一环 。为 了 设计 出品质优 良的电机控 制系统,首先要对 电机控制系统进 行分析和试验 。电机控制 系统的数字仿真就是将 电机控制系
第5章 Simulink仿真应用
突加负载抗扰特性
电网电压突减抗扰性能(a) 电网电压突减抗扰性能 整流装置输出
电网电压突减抗扰性能(b) 电网电压突减抗扰性能 电动机端电压
1.4 双闭环V-M调速系统的动态分析 双闭环V
(3)存在问题分析 (3)存在问题分析 •仿真结果与理论设计具有一定的差距; 仿真结果与理论设计具有一定的差距; 仿真结果与理论设计具有一定的差距 •系统还未调到最佳状态; 系统还未调到最佳状态; 系统还未调到最佳状态 •在实际装置上应用,与理论设计的分析相差很大; 在实际装置上应用,与理论设计的分析相差很大; 在实际装置上应用
谢谢! 谢谢!
具有积分控制作用的系统结构
β
Ui -
Id R
U*
n
+
ASR U*i
+
ACR U UPE Ud0 + - E c
n 1/Ce
Ks
- Un
α
双闭环直流调速系统的稳态结构图 转速反馈系数; α—转速反馈系数 β —电流反馈系数 转速反馈系数 电流反馈系数
U*n
+
Un
-
WASR(s)
+
U*i Ui
WACR(s) Uc
ASR输出特性 输出特性
ACR输出特性 输出特性
电流特性
1.4 双闭环V-M调速系统的动态分析 双闭环V
(2)抗扰性能分析 (2)抗扰性能分析 选取Start time=0.0,Stop time=5.0,仿真时间从 到 选取 , ,仿真时间从0s到 5.0s。扰动加入的时间均为 。扰动加入的时间均为3.5s。 。 一般情况下,双闭环调速系统的干扰主要是负载突变与 一般情况下, 电网电压波动两种。突加负载扰动绘出了该系统电动机转 电网电压波动两种。突加负载扰动绘出了该系统电动机转 速在突加负载( 速在突加负载(∆I=12A)情况下电动机电流 与输出转速 )情况下电动机电流Id与输出转速 n的关系;电网电压突减(∆U=100V)情况下晶闸管触发整 的关系; 的关系 电网电压突减( ) 流装置输出电压Ud0、电动机两端电压Ud,与输出转速n的 流装置输出电压 、电动机两端电压 ,与输出转速 的 关系。 关系。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
SIMULINK练习及闭环直流调速系统仿真利用MATLAB下的SIMULINK软件和电力系统模块库(SimPowerSystems)进行系统仿真是十分简单和直观的,用户可以用图形化的方法直接建立起仿真系统的模型,并通过SIMULINK环境中的菜单直接启动系统的仿真过程,同时将结果在示波器上显示出来。
掌握了强大的SIMULINK工具后,会大大增强用户系统仿真的能力。
在教材第三章中,对工程实践中用得最多的典型Ⅰ型系统和典型II型系统的设计方法进行了详细的分析,在此基础上,利用SIMULINK软件仿真能对调节器的参数进行更为方便的调整,可以更为直观地得到系统仿真的结果,从而加深对工程设计方法的理解。
下面就以例题3-1,3-2设计的转速、电流反馈控制的直流调速系统为例,学习SIMULINK软件的运动控制系统仿真方法。
1.仿真模型的建立进入MATLAB,单击MATLAB命令窗口工具栏中的SIMULINK图标,或直接键入SIMULINK 命令,打开SIMULINK模块浏览器窗口,如图1所示。
由于版本的不同,各个版本的模块浏览器的表示形式略有不同,但不影响基本功能的使用。
图1 SIMULINK模块浏览器窗口(1)打开模型编辑窗口:通过单击SIMULINK工具栏中新模型的图标或选择→Model菜单项实现。
(2)复制相关模块:双击所需子模块库图标,则可打开它,以鼠标左键选中所需的子模块,拖入模型编辑窗口。
在本例中,需要打开SimPowerSystems模块库,从Electrical Source组选中AC Voltage Source和 DC Voltage Source模块拖入模型编辑窗口,从Elements组选中Series RLC Branch和 Three-Phase Transfomer模块拖入模型编辑窗口,从Machines组选中DC Machine模块拖入模型编辑窗口,从Power Electronics组选中Universal Bridge模块拖入模型编辑窗口,从Measurements组选中Voltage Measurement模块拖入模型编辑窗口,从Connectors组选中Ground和 T Connector模块拖入模型编辑窗口需要从Simulink模块库中把Source组中的Step模块拖入模型编辑窗口;把Math组中的Sum和Gain模块拖入模型编辑窗口;把Continuous组中的Transfer Fcn模块拖入模型编辑窗口;把Sinks组中的Scope模块拖入模型编辑窗口;把Signal Rounting组中的Demux模块拖入模型编辑窗口;此外,我们还需要ASR、ACR和Pulse Generator三个子系统模块。
至此,我们已经把转速电流双闭环直流调速系统的仿真结构框图所需的模块都已拖入模型编辑窗口。
如图2所示。
图2 模型编辑窗口(3)修改模块参数:双击模块图案,则出现关于该图案的对话框,通过修改对话框内容来设定模块的参数。
在本例中,双击加法器模块Sum,打开如图3所示的对话框,在List of Signs栏目描述加法器三路输入的符号,其中|表示该路没有信号,所以用|+-取代原来的符号,得到动态结构框图中所需的减法器模块了。
图3 加法器模块对话框双击传递函数模块(Transfer Fcn),则将打开如图4所示的对话框,只需在其分子Numerator和分母Denominator栏目分别填写系统的分子多项式和分母多项式系数,例如0.002s+1是用向量[0.002 1]来表示的。
在这里我们用它可以构建转速、电流反馈滤波器和给定滤波器。
图4 传递函数模块对话框双击阶跃输入模块(Step)可以把阶跃时刻(Step time)参数从默认的1改到0,把阶跃值(Final value) 从默认的1改到10。
图5 阶跃输入模块对话框双击交流电压源(AC Voltage Source)得到下图6,修改峰值(Peak amplitude)默认的参数100为200*sqrt(2),修改频率(Frequency)默认参数为50。
为了形成三相交流电源,三个AC Voltage Source的Phase项依次填入0、-120、-240,分别对应uA、uB、uC。
(标注uA、uB、uC,可以通过单击AC Voltage Source进行修改。
)图6 交流电压源模块对话框双击直流电压源模块(DC Voltage Source)得到下图7,修改Amplitude即改变了电压源的幅值。
这里此模块用作直流电动机的励磁电源,幅值为220V。
图7 直流电压源模块对话框双击三相变压器模块出现下图8对话框。
修改额定功率和频率项(Nominal power and frequency)为[2e6,50]。
对于提供电机电源的变压器,选择其ABC原边绕组联结(Winding 1(ABC) connection)为Delta(D11)(三角形,电压相位领先Y联结30°),修改绕组参数(Winding parameters)为380(相电压 V1 Ph-Ph);选择abc副边绕组联结(Winding 2 (abc) connection)为Y(星形,无中线),修改绕组参数(Winding parameters)为213(相电压 V2 Ph-Ph)。
对于提供同步脉冲电源的变压器,选择其ABC原边绕组联结为Delta(D11),修改绕组参数为380;选择abc副边绕组联结为Y,修改绕组参数为15;修改其磁阻(Rm)为500,励磁电感(Lm)为500。
图8 变压器模块对话框三相桥式可控整流电路模块(6-pulse thyristor bridge)的A、B、C三个输入端连接三相电源或三相变压器的二次侧;它的两个输出端K和A,则输出整流后的直流电压,其中K端为“+”,A端为“-”。
模型的脉冲输入端pulse用于接入晶闸管的触发信号。
双击模块弹出对话框图9。
四个参数分别是导通电阻(Thyristor on-state resitance)、导通电感(Thyristor on-state inductance)、缓冲电阻(Snubber resistance)、缓冲电容(Snubber capacitance)。
图9 三相可控整流电路模块对话框直流电机模块(DC Machine),F+和F-是直流电机励磁绕组的连接端,A+和A-是电机电枢绕组的联结端,TL是电机负载转矩的输入端。
m端用于输出电机的内部变量和状态,在该端可以输出电机转速、电枢电流、励磁电流和电磁转矩四项参数。
双击模块打开对话框图10。
修改参数电枢电阻和电感(Armature resistance and inductance)为[0.21 0.0021],励磁电阻和电感(Field resistance and inductance)为[146.7 0],励磁和电枢互感(Field-armature mutual inductance)为0.84,转动惯量(Total inertia)为0.572,粘滞摩擦系数(Viscous friction coefficient)为0.01,库仑摩擦转矩(Coulomb friction torque)为1.9,初始角速度(initial speed)为0.1。
图10 直流电机模块对话框双击Gain可修改增益。
图11 增益模块对话框双击Series RLC Branch,可依次修改电阻、电感和电容。
图12 RLC串联电路模块对话框双击示波器出现图13,点击,即可打开图14(a)所示对话框。
改变Number of axes 就可改变接入信号的个数。
还可以右击选择Axes proporties得到图14(b),通过修改Title 来设置所显示参量的名字。
图13 示波器模块对话框图14(a) 示波器参数修改对话框图14(b) 示波器坐标轴参数修改对话框双击信号分解模块(Demux),通过修改(Number of outputs)可以改变输出信号的个数。
图15 分解模块对话框ASR、ACR其实是由放大器、积分器、加法器、限幅器组成的两个结构完全一样的控制环节。
它们用了来自Math组的Gain模块来仿真比例器,用Continuous组的Integrator 模块和Gain模块的串接来仿真积分器,两者通过加法器模块Sum构成了PI调节器。
经过子系统封装后构成一个模块。
我们可以通过Edit菜单选项Look under Mask查看其内部结构。
图16 ASR、ACR模块双击ASR或ACR模块填写PI调节器所需要的放大系数、微分时间常数和上、下输出(积分)限幅值,本例的输出(积分)饱和值10和-10。
其原因是转速调节器是工作在限幅饱和状态,故要在仿真模型中真实地反映出来。
如下图17(a)所示:如图17(a) ASR、ACR模块参数修改对话框Pulse Generator的机构如下图17(b)所示,主要是一个同步6脉冲触发器,由子系统(如图17(c)所示)构成三相同步电压源,由Fcn将ACR输出转换成脉冲控制角α。
而输入端Block 用于控制触发脉冲的输出,在该端置“0”,则有脉冲输出;如果设置为“1”,则没有脉冲输出,整流器也不会工作。
图17(b)图17(c)完成了对模块参数的调整后就可以(4)模块连接:以鼠标左键点击起点模块输出端,拖动鼠标致终点模块输入端处,则在两模块间产生“→”线。
按照图2的情况,反馈回路中的模块的输入端和输出端的方向位置不妥,应该把它水平反转。
单击该模块,选取Format→Rotate Block菜单项可使模块旋转90°;选取Format →Flip Block菜单项可使模块翻转。
当一个信号要分送到不同模块的多个输入端时,需要绘制分支线,通常可把鼠标移到期望的分支线的起点处,按下鼠标的右键,看到光标变为十字后,拖动鼠标直至分支线的终点处,释放鼠标按钮,就完成了分支线的绘制。
此外,选中某一模块后,当鼠标点中模块四角的黑方块进行拖曳,可以改变模块图形的大小。
使用者可以根据实际情况操作,使得界面更清楚,更美观。
模块连接完成了后的仿真模型如图18所示。
图18 电流环的仿真模型2.电流闭环控制系统仿真(1)仿真过程的启动:单击启动仿真工具条的按钮或选择Simulation→Start菜单项,则可启动仿真过程,再双击示波器模块就可以显示仿真结果,如图19所示。
图19 直接仿真结果(2)仿真参数的设置:从图19显示的仿真结果来看,无法对阶跃给定响应的过渡过程有一个清晰的了解,需要对示波器显示格式作一个修改,对示波器的默认值逐一改动。
改动的方法有多种,其中一种方法是选中图18 Simulink模型窗口的Simulation→Simulation parameters菜单项,打开如图20所示的对话框,对仿真控制参数进行设置。