参数自整定模糊PID在温度控制中的应用
基于自整定模糊PID的DSP温度控制系统设计
对其 温度 进行 控制 的算法 , 幅度 改 善 了系 统 的 动 大 静态 特征 , 并提 高 了控制 精度 。
21 0 1年 3月 2 日收 到 国家 83计 划项 目(0 6 A 0 2 9 资 助 2 6 20 A 1 Z 5 ) 第一作 者简介 : 高 峰 (9 6 ) 男 , 东 泰 安 人 , 士 研 究 生 , 18 一 , 山 硕 研
关键词
数 字信 号处 理 器 ( i t i a PoesrD P D ga Sg l rcs , S ) il n o
模 糊 PD I
温 度 控 制 系统
中图法分类号
T 3 3 1 T 2 3 2 K 2 . P 7 . ;
文献标志码
A
温度 控 制 是 指 对 某 一 特 定 空 问 的 温 度 进 行 控
外 还包 括 M X16 A 9 8电源驱 动模 块 、 行器 件半导 体 执
致 冷器 ( E ) 块 、 字 温 度 传 感 器 ( S8 2 ) C模 F 数 D 1B 0 采
样 和 D A转换 模块 等 。 / 为 了更好 的 实 现 系统 功 能 , 统 引 入 了键 盘 、 系
制调节 , 使其 达 到 系统 的要求 。本 文 主要 研 究埘 恒
温培养箱 内的温度 进行 高精 度控 制 。 恒 温培 养 箱 温 控 系 统 应 当 能 够 维 持 箱 体 内的 温度 稳定 , 为试 验 提 供 培养 需 要 的温度 场 。但 生 化 反应往 往 反 应 时 间 长 , 温 度 控 制 精 度 、 定 性 和 对 稳 安全性 都有 较高 的 要求 , 而且 反 应 过 程 中常 常 出现 放热 和吸热 现象 , 使 控制 对 象 呈 现 时变 非 线 性 的 常
基于参数自整定模糊PID控制的抗生素发酵罐温度控制系统

度 ,℃ 。
器 , 其 由传 感 器 和 变 送 器 两 部 分 组 成 , 安 装 于
发 酵 罐 侧 壁 ,输 出 与 温 度 成 正 比 的4 2 mA直 ~ 0 流 电流 信 号 。 根 据 厂 家 的 要 求 , 发 酵 罐 的 温 度 控 制 偏 差 为 : ±05 。发 酵 罐 温 度 是 通 过 蛇 形 .℃ 管 间 接 冷 却 控 制 的 ,通 过 控 制 调 节 阀 的 开 度 ,
Gs=— ()
e
第3 卷 3 第9 期 2 1 9 上 ) [ 1 01 ( 61
、 I
22 发 酵罐 温度的参 数 自整 定模糊 P D 制算法 的 . I控 MA L 仿真 T AB
在MA L B Smuik 境 中对 该参 数 自整 定 T A /i l 环 n
匐 化
如 图3 所示 。
图3 PD 制 阶 跃 响 应 和模 糊 PD 制 阶 跃 响 应 I控 I控
分 析仿 真 结 果 : 由 在单 位 阶跃 信号 下 的 常规 P D控 制 与模 糊 自适 应 P D控 制 器 的 响应 曲线 可 I I 知 ,模糊 自适 应PD的 控制方 式获 得 的系统动 态 响 I 应 曲线较 好 , 响应 时 间 短 、超 调 量 小 ,且 稳 态精 度 高 , 系统 遇 到干 扰 时 能很 快 恢 复稳 态 ,动 静 态 性能 好 。
的不 同而 不 同 ,因 此 控 制 比 较 困 难 。传 统 的P D I 控 制 已 不 适 用 于 该 控 制 对 象 。 根 据 该 厂 的 控 制 系统 的 现 状 和 抗 生 素 生 产 的工 艺 要 求 ,将 P D控 I 制 和 模 糊 控制 相 结 合起 来 的参 数 自整 定 模 糊 P D I
模糊PID自整定技术在地铁空调控制中的应用

21 { 1年 6月 1
上
海
工
程
技
术
大
学
学
报
VoI 2 . . 5 NO 2 J n 2)1 u . (1
J OuRNAI OF S HAN GHAI UNI ER I NGI E I G C E E V S TY OF E NE R N S I NC
rdu e t e fu t a in o e e a u ei sd he c rig smu a in mo e se t b ih d b a lb Co a e e c h l c u to ft mp r t r n i et a ra e, i lto d lwa sa ls e y M ta . mp r d wih t r dto a D o r lmeho t e s ts a t r e u twa bti e . t heta iin lPI c nto t d,h a if co y r s l s o an d
e()P (一1 c = (卜ek
2 2 模 糊 规 则 的 确 定 .
P e() ( ck ∞, 模糊化 _ 糊整定 △ A , ‰, 盘 A
P D控 制 中 比例系 数 志 在 于加 快 系统 的响 应 I 。
速度, 提高 系统 调节 精度 . 分 系数 k 的作 用 在 于 积 。
1 当 采 值l 取 前 样 lp , e ( ( l
图 2 温 差 隶 属 函 数 曲线
Fi . M e b r hi u to u v f g2 m e s p f nc in c r eo
tm p r t r f e e ta e e a u e di f r n i l
参数自整定模糊PID控制器在模拟铝电解槽中的应用

参数自整定模糊PID控制器在模拟铝电解槽中的应用
在铝电解槽的生产过程中,控制铝液温度和浓度是非常重要的任务。
传统的PID控制器在这方面表现出局限性,因为它们难以应对复杂的非线性系统。
为了提高控制效果,研究人员开始探索新的控制算法,其中包括模糊PID控制器。
模糊PID控制器结合了模糊控制和PID控制的优点,能够更好地应对非线性系统的控制问题。
它能够自动调整控制参数,并且能够根据实际情况进行参数整定,提高系统的稳定性和鲁棒性。
在模拟铝电解槽中的实验中,我们使用了参数自整定模糊PID控制器来控制铝液温度和浓度。
首先,我们收集了铝液温度和浓度的实时数据,并将其输入到控制器中。
控制器根据这些数据进行模糊推理,得出相应的控制动作。
然后,控制器将控制信号发送给执行机构,调整铝液温度和浓度。
实验结果显示,参数自整定模糊PID控制器在控制铝液温度和浓度方面具有优越性能。
它能够快速地响应系统变化,使铝液温度和浓度保持在设定值附近。
与传统的PID控制器相比,模糊PID控制器具有更好的鲁棒性和适应性。
此外,参数自整定模糊PID控制器还具有自动整定参数的功能,能够根据系统的实际运行情况自动调整参数,使控制系统更
加稳定和可靠。
这对于长时间运行的铝电解槽来说尤为重要,因为系统参数可能会随着时间的推移而发生变化。
综上所述,参数自整定模糊PID控制器在模拟铝电解槽中的应用具有很大的潜力。
它能够有效地控制铝液温度和浓度,提高生产效率和产品质量。
未来,我们将进一步研究和改进这种控制器,以适应更复杂的工业控制系统。
模糊PID及其在TEC温控系统中的应用

《 动 技 与 ቤተ መጻሕፍቲ ባይዱ》07 第2卷 0 自 化 术 应 20年 6 第1期
经 验 交 流
7e hn c c i al Comm u c ton nia i s
模糊 P 其在 T I D及 C温控 系统 中的应用 E
胡 峻 峰 , 亚 凤 2 郑 纲 赵 ,
模糊控制是以人的思维判断方法形成模糊控制规则 , 在模糊 规则的基础上, 以模糊量作为实际控制的依据, 是—个表达某种控 制思想的基本公式【。 3 1 目前 , 常规PD 节器控制作用的一般形式为 I调
体加热 ; 那么, 当流过T c E 电流方 向为负时,E 物体进行制 。 TC 半导体制冷器在工程应用上最重要的问题 , 是如何结合实际使用 条件 , 结合其性能参数以求获得最佳的应用效果 【 2 I 。 在温度控制系统 中, 由于常规的P D调节器控制原理简单 , 容
(. 1 东北林业大学机 电工程学院 , 黑龙江 哈尔滨 10 4 ;2 哈尔滨工程大学 自动化学院 , 50 0 . 黑龙江 哈尔滨 10 0 ) 5 0 1
摘
要: 本文介绍了模糊 P D控制器原理 , I 针对半导体 制冷器( E 工作特性 , MS 4 0 4 9单片机设计 了高精度 T C温度控制系 T c) 用 P 3F4 E
F z y・ D a d I pia ini u z - n sAp l t TEC e e a u eCo t l PI t c o n T mp rt r n r o
HU u f n ZHAO -e g , J n-e g , Ya f n ZHENG ng Ga
调小的特点 , 又结合P[ I控制器的动态跟踪品质和稳态精度 , ) 可不
失为一种 比较好的控 制方法。
PID参数自整定模糊控制器的应用

模糊PID控制在温度控制系统的应用

广 义被 控 对 象 的 阶跃 响应 可 用 一 阶 惯性 环 节 加 纯 滞 后 延 迟 来 近
_ I _
一
yt() o ̄k
]
【
积分 I ÷
J j
卜' H被控 对躲 _— r _ —一
似 的 。 们 这 里 选 用 Ze Ir Nc os整 定公 式来 整定 PD控 制 我 ige— ih I I
对具有非线性 、 耦合 、 变 、 强 时 时滞 等 特 性 温 度 控 制 系 统 来 说 , 用 模 糊 控 制 是 可 行 的 。 于单 纯 的模 糊 控 制 往 往 存 在 静 态 采 由
误 差 ,所 以本 文 中就 可 以取 得 较 好 控 制 效 果 的 模 糊 P D 控 制 在 I 温 度 控制 系统 中 的应 用 重 点 进 行 了论 述 。
器 的参 数 。 常用 Ze Ir Nc 0s整定 参 数 如表 1所 示 。 i e_ ih l g
表 1 Ze lr Nih l 定 参 数 表 ige~ c os整
{
一
微 分
阶跃 响 鹩 定 控制器类型
图 1 PI 控 制 系 统 原 理 框 图 D
/ t 石
c ompar h i o to p f r e t er c n r l ero man es c . Ke wo d PI c tol rfzz PI y r s: D on r l ,u y e D c nt . m pert r c tols sem ,i ua i o r t o1e a u e on r y t sm lt on
宗素 兰
( 安徽 工业大学电气信息学院, 安徽 马鞍 山 2 3 0 ) 4 0 2
参数自整定模糊PID控制在烘干炉中的应用
文章编号:1001.9944(2009)10-0039-03参数自整定模糊P I D控制在烘干炉中的应用马金雷,虎恩典,王祥(宁夏大学机械工程学院。
银川750021)摘要:将参数自整定模糊控制与传统PID控制相结合。
实现了列'PID参数的在线自整定,克服控制系统的大滞后、非线性等不利因素的影响。
该控制器在烘干炉温度控制系统中.取得了良好的控制效果。
关键词:模糊控制;PID控制;参数自整定;烘干炉中图分类号:TP273文献标志码:APar am et er s A ut o-t uni n g Fuzz y PI D C ont r ol l er a nd I t s A ppl i c at i on i n D r yi ng Fur na ce T em per at ur e C ont r olM A J i n—l ei,H U E n—di an,W A N G X i ang(Sch ool of M e cha ni ca l E ngi neer i n g,N i ngxi a U ni ver si t y,Y i n chuan750021,C hi na)A bst r act:Thi s pa per pr es ent s a con t r ol ler by c om bi ni ng aut o-t u ni ng f uzzy cont r ol w i t h t r adi t ional PI D cont r01.T he m et hod i s use d t o t une t he PI D par am e t er s onl i ne a nd i t c a n ov er com e t he i nf l uenc e of l ar ge del ay a nd nonl i nea r i n pr oces s cont r ol s ys t em.I t achi e ves a goo d cont r ol ef f ectnes s i n t he dr yi ng f ur nace t em per a t ur e cont r ol s y s t em.K e y w or d s:f u zzy co nt r ol;PI D con t r ol;par am e t er aut o-t u ni ng;dr yi ng f ur n ace烘干炉是电机制造工业中必不可少的设备之一。
基于PID参数自整定的炉温模糊串级控制系统设计
The de i n o e p r t r uz y c s a e c n r ls se sg f t m e a u e f z a c d o t o y t m
b sd o ef d u t gP D p r mee s a e n sl a j si I a a tr - n
Ke r stm ea r o t l c sa ecnrl sl ajsn I aa tr; uzdPD; ne— ywod : p rt ecnr ; ac d o t ; e -dut gPD prme s fze —I it e u o o f i e l
自适应模糊PID在温度控制系统中的应用
到 F 一 工序 。 道 由于 实 际 工艺 中扰 动 因 素 多 , 荷 会 经常 发生 变 负 化 , . 度 系 统 容 量 滞 后 大 , 了保 证 整 个 工 艺顺 利 运 行 . 求 日温 为 要 锅 炉 温 度 波 动不 能 过 大 , 则 会 影 响 后续 产 品 的质 量 。 1中锅 否 图
1 系统 要 求 及 控 制 方 案设 计
模 糊 PD 控 制 器 的 基 本 思 想 是 将 模 糊 决 策 理 论 和 PD 控 I I 制 结 合 起 来 , 偏 差 e和偏 差 变 化 e 作 为 输 入 , 用 模 糊 控 制 以 。 利
规 则 在 线 对 P D参 数 进 行 修 改 。其 既 具 有 模糊 控制 灵 活 而适 应 I
性 强 的优 点 , 具 有 PD控 制 精 度 高 的特 点 。 又 I
11 系统 工 艺 要 求 如 图 1所示 为 温度 控 制 系 统 工艺 流 图 ,系统 要 求 对 锅 炉 加 热 至 某 一恒 定 值 ( 4 ) 右 , 热 后 的 热 水 通 过 一 段 管 导 输 送 7% 左 加
模 型 的复 杂 系统 。 对此 , 常规 PD控 制 器无 法 获得 好 的控 制 效果 。 I 而模 糊控 制 器 则 是根 据 人 工控 制 规 则组 织 控 制决 策 表 , 后 由 该 然 表决 定控 制 量 的大 小 。将 模 糊控 制 和 PD控 制 器 两者 结 合起 来 , I 扬 长 避短 , 具 有 模 糊 控 制 灵 活 而 适应 性强 的优 点 , 具 有 PD 既 又 I 控制 精 度 高 的特 点 , 复杂 控 制 系统 具 有 良好 的控 制 效果 。本 文 对 研 究 一 种 自适 应 型模 糊 PD控 制器 在 锅炉 温 度系 统 中 的应 用 。 I
模糊PID在恒温箱温度控制中的应用

作为输 出。模糊 集
� � 用超出许可范围, 应取较大的 和 较小的 , 同时 为 � � 避免系统因积分饱和所 引起的 较大超 调, 应 对积分 作 � 用加以限制, 通常取 = 0 ; � � � � � 当 和 为中等 大小时, 为使 系统 响应 的 � � � 超调减 小, 并 保证 系统 的响 应速 度, 、 、 的值 的 � � � 大小适中; 当
模糊理论是 在 美国 柏克 莱加 州 大学 电 气工 程 系 � � � 通过不断检测偏差 和偏差变化率 , 再根 模糊控制原
《自动化仪表》 第 27 卷增刊 2006 年 5 月
14 9
模糊
D 在恒温箱温度控制中的应用
杨树亮, 等
理来对 � � � 3 个参数进行在线修改, � � � 以满足不同 � 和 � 对控 � 论域为 [ - 3, 3] ;、 、 、 和 的隶属函数曲 � � � 制参数的不同要求, 而使被控对象有良好的动、 静态性能。 线分别如图 2 所示。 2 .2 控制规则 D 参数的整定必须考虑 到在不同 时刻 3 个参 数 统输出特性的影响情况, 可归纳出在一般情况下, 在不 定要求如下: 当 始偏差 较大时, 为加快 系统 响应速 度并 防止 起 瞬间变大, 可能引起微分过 饱和, 而使控 制作
0
引言
目前常用的恒温箱可分为 3 类: 高温恒温箱, 箱温
L
.A .
教授于 19 65 年创 立的模 糊集 合理论 的
数学基础上发展起来的, 他提出 了能够 表征 人类思 维 中 模 糊 概 念 的 方 式— — —隶 属 度 函 数, 发 表了 题 为 ; 中温恒 温箱, 箱温在 � � � � � � � � 10 � � � � 60 ; 低温 恒温 “F S ” 的论文[ 1]。模糊控 制器 FC ( 。本 � � � � � 人自己 � � � � � � � 研制 � � � � � 了一个 新型的 恒 ) 也 称为 模 糊逻 辑 控 制器 FLC ( 4]
参数自整定模糊PID在温度控制中的应用

LIJ n t g, HIW e .a GAO n u -i S n 1n, n Na
基于模糊PID参数自整定的温度控制系统的研究(精)

基于模糊PID参数自整定的温度控制系统的研究摘要:工业温度控制系统具有非线性、时变性和滞后性等特性,严重影响温度控制的快速性和准确性,为了解决常规PID参数调节在温度控制中适应性差,调节效果不理想的问题,这里采用了模糊PID参数自整定控制方法,用模糊控制规则对PID参数进行修改,利用Matlab的Simulink仿真工具箱做了常规PID与模糊PID的仿真对比试验。
仿真结果表明,模糊PID参数自整定控制效果在超调量和调节时间上都小于常规PID,提高系统快速性和准确性,改善了温摘要:工业温度控制系统具有非线性、时变性和滞后性等特性,严重影响温度控制的快速性和准确性,为了解决常规PID参数调节在温度控制中适应性差,调节效果不理想的问题,这里采用了模糊PID参数自整定控制方法,用模糊控制规则对PID参数进行修改,利用Matlab的Simulink仿真工具箱做了常规PID与模糊PID的仿真对比试验。
仿真结果表明,模糊PID参数自整定控制效果在超调量和调节时间上都小于常规PID,提高系统快速性和准确性,改善了温度系统动态性能。
关键词:温度控制;Matlab仿真;模糊规则;PID在工业生产过程中温度是重要的控制参数之一,对温度的有效控制对于保证生产质量具有重大的现实意义和理论价值。
工业温度控制系统具有非线性、时变性和滞后性等特性,而常规PID控制器参数往往整定不良,性能欠佳,对运行的工作情况适应性差,导致常规PID控制不能使温度控制达到理想效果。
为了改善常规PID控制效果,增强系统的适应性,实现PID参数自整定,本文设计出一种PID参数自整定的模糊控制器。
利用模糊逻辑对PID控制器参数进行调整实现控制效果最优,将温度作为控制对象,并利用Matlab的Simulink工具箱实现仿真对比分析常规PID与模糊PID的曲线,最后应用到实际的温度控制系统中,对比分析常规PID与模糊PID的控制效果。
1 PID控制算法的相关介绍1.1 PID控制算法PID控制器因为结构简单、容易实现,并且具有较强的鲁棒性,因而被广泛应用于各种工业过程控制中。
热水锅炉温度控制的模糊PID参数自整定方法

张秀 滢 刘强 ( 邯郸设计工 中煤 程有限 责任公司)
, 『 模 糊 比例 、 分 、 分 系 数 . 厂一 积 微 () 2 积 分 系数 K K, , Cl ( F + E / 3) 微 分 系数 KmK t ,C E ( 4) 0 引 言 其 中 , c , c , 为模糊推 理 的结果 , E/ E / E 、 即为参数校 PD 算 法 由于其 结构 简单 、 l 鲁棒 性好 和 可 靠 性 高 的特 点 , 为 迄 正量 K 、 为参 数 初 值 。 成 K 、 K 今为止应用最广泛的控制算法。然而在热水锅炉的温度控制中 , 由于 在 模 糊 自整 定 PD控 制器 中 ,我 们 把 偏 差 E I C和 偏 差 的 变化 率 被控 对 象具 有 非 线性 、 时变 、 滞后 等 特 点 , 热水 锅 炉 温度 控 制 受 环 作 为输 入 变量 , 、 作 为 输 出 变量 。 和 C语 言 变量 的论 域 为 大 且 。K、 E 境温 度 和 燃 料 等诸 多 因素 影 响 , 致 难 以建 立 精确 的数 学模 型 , 以 {6,4, 2 0 2, 6 ,…K、 言 变 量 的 论 域 为 : 3 2, 1 O 导 难 一 一 一 , , 4,) K K, 语 { , 一 ,, 一 确定最佳的控制器参数。此时, 传统 的 PD控制对进一步提高控制对 1 2 3, 变量 的语 言 值 为{ B, M, SZ,S P P } 考虑 到对 论 I , ,)各 N N N , P ,M,B。 象 的质 量 遇 到 了极 大 的 困难 ,难 以 获 得 良 好 的效 果。 为 了克 服 常 规 域 的覆 盖程度和 灵敏 度、 稳定性 、 棒性的原则 , 鲁 各变量 的隶属 函数 PD调节器 的不足, I 提高其性能, 人们进行了进一步 的研究。 曲线 见 图 2 图 3 、 。 模 糊 控 制 是智 能控 制理 论 的 一 个 分 支 , 十 年 来 正 以 它 全 新 的 近 控制方式在控 制界 受到 了极大的重视并得 到了迅速发展。与传统的 PD控 制 方式 相 比 , I 它具 有 特 别 适 合 于 那 些难 以 建 立精 确 数 学 模 型、 非 线 性 和 大 滞 后 的 过 程 等 特 点 。 但 是 经 过 深 入 研 究 , 会 发 现 基 本 也 模 糊 控 制 存在 着 其 控 制 品 质 粗糙 和精 度 不 高等 弊 病 。 因此 , 本文提 出一种将模糊控 制和 PD控 制相 结合起 来 , 过 I 通 模糊控制 实现 PD参数 自整定 的 方法来调 节锅炉 出水温度。 这种 I F zy PD策 略 , 糊 控 制 的 采 用 不 是 代 替 PD 控 制 , 是 对 传 统 uz — I 模 I 而
模糊PID算法在泡沫玻璃窑炉温度控制中的应用

l 系统结构模 型与控制策略
1 1 系统 结构模 型 .
控 制 系统模 型结 构 由组态 监控 主站 、 L P C从 站 、 被 控对 象 及 测 量 变 送 组 成 , 站 和 从 站 之 间 通 过 主 P O IU R F B S总线 连接 , 型结构 如 图 1 模 所示 。 1 2 控 制 策略 .
平衡 的气 、 固两相 组 成 的不 均 匀物 质 。玻 璃 熔 体 的
黏度 和表面 张力都 是 温 度 的函数 , 可 以通 过 调 节 都
发 泡温度 进行 有效 地 控 制 , 以采 用 先 进 的温 度 控 所 制算 法是 保证 泡沫玻 璃质 量 的重要 环节 。而 泡沫 玻 璃生 产窑 炉是 典型 的大 时滞 、 多变量 、 耦合 的非线 强
时 变 系 统 的特 点 , 具 进 模
入窑 炉 内采用 推进 器 间歇
剂 和促进 剂等 , 经过 细粉碎 混合 均匀 形成 配合料 , 放 入到 特定 的模具 中 , 经过 预热 、 再 熔融 、 泡 、 火等 发 退
工艺 制成 , 是一种 性能 优越 的隔 热 、 吸声 、 防潮 、 防火
的轻质 高强 建筑材 料 和装饰 材料 。利 用废 弃物生 产 的新 型环保 建 材—— 泡 沫 玻璃 , 仅 符 合 环 境 保 护 不
App i a i n o u z D l o ih i o m l s u na e t m pe a ur o r l lc to f f z y PI a g r t m n f a g a sf r c e r t e c nt o
Q A G Mi h i Z O uw n I N n u , H U X e e g
模糊PID控温算法的具体实现(一):参数自整定模糊PID算法概念

模糊PID控温算法的具体实现(⼀):参数⾃整定模糊PID算法概念 上个学期已经基本上实现了PID的温控算法,为了撰写⼩论⽂,这个学期最先要做的事情就是实现模糊PID的温控算法。
模糊控制系统的构成与与常规的反馈控制系统的主要区别在于控制器主要是由模糊化,模糊推理机和精确化三个功能模块和知识库(包括数据库和规则库)构成的。
具体实现过程如下所⽰:(1)预处理: 输⼊数据往往是通过测量设备测量得到的⼀个具体数据,预处理就是在它们进⼊控制器前对这些数据进⾏分类,或性质程度的定义。
预处理过程也是量化过程,它是在离散空间中把输⼊数据划分为若⼲个数字级别。
例如,假设⼀个反馈误差为 4.5,误差空间是(-5,-4…4,5),量化器会使它靠近离它最近的级别,四舍五⼊到 5。
称量化器量化的⽐例为量化因⼦。
量化过程是个削减数据量的⽅法,但是如果量化过于粗糙,控制器会振荡甚⾄失去平衡。
(2)模糊化 在进⾏模糊化时,需要确定模糊集论域中语⾔变量各值所对应的模糊⼦集的⾪属度函数。
⾪属度函数⼀般是根据操作者的经验初步确定,在调试开发甚⾄控制器运⾏中需不断修正和优化,以满⾜控制的要求。
⾪属度函数的形状很多,但是影响模糊控制器性能的关键因素是各模糊集覆盖论域的情况,⽽⾪属函数的形状在达到控制要求⽅⾯并⽆⼤的差别,为使数学表达和运算简单,⼀般选⽤三⾓形、梯形⾪属函数。
但⾪属函数的幅宽⼤⼩对性能影响较⼤,⾪属函数形状较陡时,引起的输出变化较剧烈,控制的灵敏度⾼;⾪属函数形状平缓时,引起的输出变化较缓慢,对系统的稳定性好。
因此,在选择⾪属函数时,⼀般在偏差较⼩或接近于零附近时,采⽤形状较陡的⾪属函数;⽽在偏差较⼤的区域采⽤形状平缓的⾪属函数,以使系统具有良好的鲁棒性。
⽽且在实际⼯作中,不应出现三个⾪属函数相交的状态。
⼀般,任何两个模糊⼦集的交集的最⼤⾪属度中的最⼤值取为 0.4~0.8 之间。
另外,⾪属函数的位置分布对控制性能也有⼀定的影响,当函数在整个论域平均分布时,控制效果并不好,因此,⼀般将零固定,其它模糊⼦集向零集靠拢,以达到较好的控制效果。
模糊PID在加热器温控系统中的应用
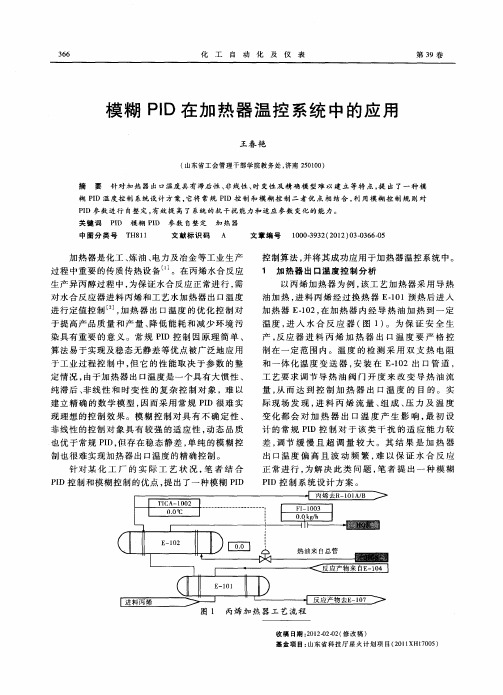
进 行定 值控 制 , 热 器 出 口温度 的优 化 控 制对 加 于提 高产 品质 量 和 产 量 、 降低 能耗 和减 少 环 境 污 染 具有 重要 的意 义 。常 规 PD控 制 因 原理 简 单 、 I 算 法易 于 实现及 稳 态无静 差 等优点 被广 泛地 应 用 于工业 过程 控 制 中 , 它 的 性 能取 决 于 参 数 的 整 但
差, 调节 缓 慢 且 超 调 量 较 大 。其 结 果 是 加 热 器 出 口温 度 偏 高 且 波 动 频 繁 , 以 保 证 水 合 反 应 难
正 常 进行 , 解决 此 类 问题 , 者 提 出 一 种 模 糊 为 笔
P D控 制 系 统设 计 方 案 。 I
图 1 丙 烯 加 热 器 工 艺 流 程
工 艺 要求 调 节 导 热 油 阀 门 开 度 来 改 变 导 热 油 流
纯 滞后 、 线 性 和 时 变 性 的 复 杂 控 制 对 象 ,难 以 非 建 立精 确 的数 学模 型 , 而采 用 常 规 PD很 难 实 因 I 现 理想 的控 制 效 果 。模 糊 控 制 对 具 有 不 确定 性 、 非线性 的控 制 对 象 具 有 较强 的适 应 性 , 态 品 质 动 也 优 于常 规 PD, I 但存 在稳 态 静 差 , 纯 的模 糊 控 单 制也很 难 实现 加热 器 出 口温 度 的精 确 控制 。 针 对 某 化 工 厂 的 实 际 工 艺 状 况 , 者 结 合 笔 P D控 制和 模糊 控制 的优 点 , 出了一种 模糊 PD I 提 I
糊 PD 温 度控 制 系统 设 计 方 案 , I 它将 常 规 PD 控 制 和 模 糊 控 制 二 者 优 点 相 结 合 , 用 模 糊 控 制 规 则 对 I 利
模糊PID控制在烟酸反应釜温度控制中的应用

的整定 PD参数 , I 不仅要求工程师有较丰富的整定
经 验 ,同时整定 过程 也 比较复 杂. 图 1 烟 酸生 产 的一个 环节 , 先打 开入 料 阀 为 首
控制对于产品的质量起到非常重要的作用. 但是 由
于在 化学 反 应 中 , 料 不 断注 入 反应 釜 , 应 过 程 原 反
J n u.
文 章 编 号 :6 3 2 4 20 )2 0 5 — 4 1 7— 30{0 6 0 - 0 9 0
模糊 PD控制在烟酸反应釜温度控制中的应用 I
马 聪 , 吴建 国,朱海 荣
( 通大学 电气工程学 院, 南 江苏 南通 摘 26 0 ) 2 0 7
要: 文章讨论 了烟酸生产过 程 中反应 釜温度控制的设计问题 . 由于在化学反应过程 中反应釜特性不断变化 , 造
Ab ta t T etmp rtr o t lo ioii a i gttd ratrh sb e ic se n e in d i hsp p r T e sr c : h e eaue cnr f c t c cda i e e co a e nds u sd a d d sg e nti a e. h o n n a
然而反应过程对温度要求苛亥 , 0 温度太低 , 无法进
行 正 常 反应 , 高 ,容 易使 烟 酸 炭化 , 响பைடு நூலகம்成 品 质 太 影
量 。 会 导 致反 应 釜 中爆 沸 ,引起 冲料 , 成 生 产 还 造
制 , 过整 定 PD 控制 参 数 达 到对 温 度 的 控 制. 通 I 但
信 号 ,一 般 情 况 下 ,采 用 普 通 PD控 制 器 进 行 控 I
开 始滴加硝酸 , 整个过程持 续 2 , 2h 反应 过程缓
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.5 模糊控制规则
根据上述 PID 参数的作用以及在不同的偏差及 偏差变化率下对 PID 参数的要求 , 可获得输出变量 ΔKp 、ΔK i 、ΔK d 的模糊控制规则 。 表 1 给出输出变
收稿日期 :2007-01-24
2007 年 无线电工程 第 37 卷 第 7 期 47
专题技术与工程应用
的控制效果 。参数自整定模糊 PID 控制器的系统结 构其结构如图 l 所示 。
图 1 参数自整定模糊 PID 系统结构
选择模糊推理系统的输入量为期望温度值与 采样得到的实际温度计算得到的偏差 e 和偏差变化 率 ec , 输出量为 PID 参数的修正量 ΔKp 、ΔK i 、ΔKd 。 其设计思想是先找出 PID 的 3 个参数与偏差 e 和偏 差变化率 ec 之间的模糊关系 , 在运行中通过不断检 测 e 和 ec , 再根据模糊控制原理对 3 个参数进行在 线整定 , 通过常 规 PID 控制器获 得新的 Kp 、Ki 、K d 后 , 对控制对象输出相应的控制 。使被控对象具有 良好的动态 、静态特性 。采用的 PID 控制器的控制 算式为 :
LI Jun-ting , SHI Wen-lan ,GAO Nan
(Hebei College of Industry and Technology , Shijiazhuang Hebei 050091, China) Abstract It is hard to get ideal control effect with traditional PID in process control.This paper presents a controller by combining autotuning fuzzy control with traditional PID control.The fuzzy inference method is used to tune the PID parameters.It can conquer the influence of nonlinear and large delay in process control system.And it is applicable to temperature control system.Experiment shows that the controller gives a good control performance. Key words fuzzy control;PID control;auto-tuning ;temperature control
PID 控制器时系统静差为 -0.391 , 超调量为 12.5 %,
比较大 , 调节时间
为105.3 min ;引入
模糊 PID 控 制器
以后, 系统静差为
-0.066 , 超调量为 2.37 %, 调 节 时间
为 92.7 min 。很 明
显 引 入 模 糊 PID 控制器以后 , 全面
改善 了系统 稳态 精度和动态性能 。
PS
PM
PS
ZE NM NM NM NM
PM ZE ZE NS NM N L NM NM
PL ZE ZE NS NM NM NM NM
2 实际控制效果
电加热炉炉温控制是一个典型的非线性 、时变 分布参数 、大滞后的复杂受控对象 。 它利用电力作 为能源 , 电炉丝提供功率 。 用热电偶检测炉内温度 , 经温度变送器转换成标准信号 , A/ D 转换后进入计 算机 , 经过 控制器利用一 定算法进行调节 , 经 D/A 转换由调功器对炉温进行调控 。 要求炉温以最快的 速度升到设定温度后保持不变 。
1.4 各变量隶属度函数的确定
设在偏差论域 E 和偏差变化论域 EC 上及参数 ΔKp 、ΔK i 、ΔK d 分别定义了 7 个模糊子集 , 相应的语 言变 量 为 {负 大 (NL), 负 中 (NM), 负 小 (NS ), 零(ZE), 正小(PS), 正中(PM), 正大(PL)}, 采用归一 化论域 。隶属度函数均采用三角形对称的全交迭函 数 , 并依据偏差及偏差变化率在不同阶段对系统动 态过程的影响归纳出具体的模糊控制原则 , 模糊推 理采 用 MAX -MIN 规 则 , 解 模 糊 化 采 用 面 积 重 心法 。
u(t)=Kpe(t)+Ki ∫0t e(t)dt +Kd ded(tt)。
式中 , Kp =Kpo +ΔKp ;K i =Kio +ΔK i ;K d =K do + ΔK d 。
1.3 PID 参数模糊控制原理
PID 参数模糊控制原理如下 : ①当偏差较大时 , 为加快系统的响应速度 , 应 取较大的 Kp , 同时为避免由于开始时偏差的瞬时变 大可能出现的微分过饱和而使控制作用超出许可的 范围 , 应取较小的 Kd , 为防止系统响应出现较大的 超调 , 产生积分饱和 , 应对积分作用加以限制 , 通常 取 K i =0 , 去掉积分作用 ; ② 当偏差和偏差变化率处于中等大小时 , 为使 系统响应具有较小的超调 , K p 应取小一些 , K i 的取 值要适当 , 这种情况 Kd 的取值对系统响应的影响 较大 , 取值要大小适中 , 以保证系统响应速度 ; ③ 当偏差较小即接近于设定值时 , 为使系统有 良好的稳态性能 , 应增加 Kp 和K i 的取值 , 同时为避 免系统在设定值附近出现振荡 , 并考虑系统的抗干 扰性能 , Kd 取值是相当重要的 。 一般是当偏差变化 率较小时 , K d 可取大一些 ;当偏差变化率较大时 , K d 应取小一些 ; ④ 偏差变化率的大小表明偏差变化的速率 , 偏 差变化率值越大 , 则 Kp 的取值越小 , Ki 取值越大 。
作者简介 李俊婷 女 , (1963 -), 河北工业职业技术学院副教授 。 主要 研
究方向 :自动控制技术 。
(上接第 27 页)
数据宿 中的数 据便是 发送 码矢 , 否则 就不 是发 送 码矢 。
交错度与信道特性(衰落与干扰)密切相关 , 确 定最佳交错必须根据信道的长期统计特性 , 所以必 须研究深衰落的持续分布 , 确定信道中存在的突发 错码分布和交错度的分布 。
48 2007 Radio Engineering Vo1.37 No.7
专题技术 与工程应用
确定该 控制器 的引入 对系 统性 能的改 善 , 本文 用
MATLAB 软件进行了仿真 , 以带纯滞后的二 阶加热
炉对象作为仿真对象 。加热炉控制系统仿真波形如
图 2 所示 。从仿真数据和波形可以看到 :使用传统
量 ΔKp(ΔK i 、ΔK d 同理可推)的控制规则 。
表 1 ΔKp 的模糊控制规则
ΔK p NL NM
NS
ZE
PS
PM
PL
NL PL PL PM PM PS
ZE ZE
NM PL PL PM PS
PS
ZE ZE
NS PL PL PM ZE ZE NS NS
NM
况 , 计算 机通过 模糊推 理和 模糊计 算等 自动 调整 PID 参数 。
1 参数自整定模糊 PID 控制器的设计
1.1 常规 PID 控制器的原理
常规 PID 控制器可以描述为 :
k
u(k)=Kpe(k)+K
i
∑
j =0
e(j)+Kd
ec(k)。
式中 , e(k)、ec(k)分别为系统偏差 、偏差变化量 ;Kp
为满足对加热炉的温度控制的要求 , 克服传统 PID 控制器的一些缺点 , 本文将模糊控制与 PID 控 制器结合起来 。 模糊控制不要求被控对象的精确模 型 , 适应性强 , 它作为一种新型的控制理论 , 已成功 地应用于工业控制 , 并取得了良好的控制效果 , 成为 自动控制拉术领域中非常有前途的一个分支 。模糊 PID 控制器是人们利用人工智能的方法将操作人员 的调整经验作为知识存入计算机 , 根据现场实际情
将参数自整定模糊 PID 控制器应用于电加热炉 温度控制系统 , 设计目标是在同样的控制精度条件 下 , 使系统的过渡时间尽可能短 , 改善控制效果 。采 用复合控制 , 即具有模糊控制灵活 、响应快和适应性 能强的优点 , 又具有 PID 控制精度高的特点 , 使系统 能有效抑制纯滞后的影响 , 而且鲁棒性强 , 当参数变 化较大及有干扰时 , 仍能取得较好的控制效果 。 为
参考文献
[ 1] 陶永华 , 尹怡新 , 葛芦 生 .新型 PID 控制 及其应 用[ M] . 北京 :机械工业出版社 , 1998.
[ 2] 刘金琨.先进 PID 控制及其 MATLAB 仿真[ M] .北京 :电 子工业出版社 , 2003.
[ 3] 姜 楠 , 姜艳姝 .参数 自整定模糊 PID 控制器在转矩 流变 仪系统的应 用研究[ J] .自动化 技术与 应用 , 2006, (11): 34 -36.
关键词 模糊控制 ;PID 控制 ;自整定 ;温度控制 中图分类号 TP273.4 文献标识码 B 文章编号 1003-3106(2007)07-0047-03
Parameters Auto-tuning Fuzzy PID Controller and Its Application in Temperature Control
0 引言
PID 控制器是最早发展起来的控制策略之一 。 由于其具有结构简单 、容易实现 、原理透明 、鲁棒性 较好 、能满足大多数工业过程控制的要求 , 一直为广 大的控制技术人员所青睐 , 被广泛应用于工业过程 控制之中 。 但是 , 随着生产和技术的发展 , 一方面 , 人们对过程控制系统提出了更高的要求 ;另一方面 , 被控过程越来越复杂 , 非线性 、大滞后 、参数时变性 等使得控制愈来愈困难 。这时 , 传统的 PID 控制就 往往不能胜任了 。电加热炉的温度控制系统具有非 线性 、大滞后 , 以及实施控制时需要克服超调量大 、 过渡过程时间长等缺点 。