m8u3task-project
Curriculum Vitae 样板 (11)
Vita of Jan M. AllbeckSystems Programmer, Center for Human Modeling and SimulationComputer and Information Science DepartmentUniversity of Pennsylvania, Philadelphia, PA 19104-6389215-573-9463; 215-573-7453 (fax); allbeck@Degrees:BA 1995 Mathematics, Bloomsburg University, Bloomsburg, PABS 1995 Computer Science, Bloomsburg University, Bloomsburg, PAMSE 1997 Computer and Information Science, University of Pennsylvania, Philadelphia, PA Ph.D. Candidate Computer and Information Science, University of Pennsylvania (ABD)Employment:All-Byte Consulting, Computer Consultant, 1992-1995University of Pennsylvania, Teaching Assistant, 1996-1997University of Pennsylvania, Systems Programmer, 2001-presentCurrent Responsibilities:•Management of HMS research projects including proposals, reports, software design and deliverables.•Work with HMS Director, Dr. Norman Badler as well as independently to supervise both individual and group projects consisting of both graduate and undergraduate students. •Participate in outreach activities through demonstrations of our immersive VR studio, LiveActor and HMS tours to high school groups, alumni, visiting researchers and teachers, and industry liaisons, as well as, through publications and publicity for HMS, the Digital Media Design program, and the UPenn student SIGGRAPH chapter.•Negotiate with hardware and software vendors and oversee or perform required installations. •Represent HMS at sponsor meetings and research conferences.Brief Research Summary:Research for the Center for Human Modeling and Simulation at the University of Pennsylvania focused on embodied, autonomous agents with individuality, developing behavior-based animation of human movement especially for gesture, gait, and facial expression, constructing a parameterized action representation for real-time simulation and animation, and understanding the relationship between human movement, natural language, and communication.Selected Professional Activities:•Programmer/content designer, ONR Virtual Environments for Training. UPenn, 1996-2001. •Programmer/system designer/project manager, NSF The Actionary: A Dictionary that Portrays Natural Language Expressions as Context-Sensitive Simulations of HumanActions. UPenn, 1999-2001.•Program/system designer, Pedestrians: Creating Agent Behaviors through Statistical Analysis of Observation Data. UPenn, 2000.•Project manager, ACUMEN: Amplifying Control and Understanding of Multiple Entities.UPenn, 2001-2002.•Project manager/programmer, NASA Crew Task Simulation for Maintenance, Training, and Safety. UPenn, 2000-2003.•Project manager/programmer, LMCO Animation test-bed. UPenn, 2002-2004.•Project manager, ONR VIRTE (Virtual Technologies and Environments). UPenn, 2004. •Project manager, NASA RIVET (Rapid Interactive Visualization for Extensible Training).UPenn, 2004.•Reviewer for Computer Graphics International, 2001; SIGGRAPH, 2001; Graphical Models Journal, 2001; Autonomous Agents, 2001; Computer Animation, 2001; Web3D, 2002;Autonomous Agents and Multi-agent Systems, 2002; Computer-Human Interaction, 2003;SIGGRAPH, 2003; Autonomous Agents and Multi-agent Systems, 2003; Intelligent Virtual Agents, 2003; Computer Graphics International, 2004; Autonomous Agents and Multiagent Systems, 2004; Eurographics, 2004; Technologies for Interactive Digital Storytelling and Entertainment, 2004; IEEE Transactions on Visualization and Computer Graphics, 2004•Program committee, Virtual Storytelling 2003, CHI Workshop on Subtle Expressivity for Characters and Robots 2003, AAMAS Workshop on Embodied Conversational Characters as Individuals 2003.Selected Publications:•J. Allbeck and N, Badler. "Embodied Autonomous Agents," In Handbook of Virtual Environments, K. Stanney, Ed., Lawrence Erlbaum Associates, 2002, pp. 313-332.•N. I. Badler and J. M. Allbeck. “Towards Behavioral Consistency in Animated Agents,”Proceedings of Deformable Avatars, Kluwer Academic Publishers, N. Magnenat-Thalmann and D. Thalmann, eds., 2001, pp. 191-205.•J. Allbeck and N. Badler. “Creating Embodied Agents with Cultural Context,” In R. Trappl and S. Payr (Eds.), Agent culture: Designing virtual characters for a multi-cultural world.New York: Lawrence Erlbaum Associates, 2004, pp. 107-126 .•N. Badler, J. Allbeck, L. Zhao, and M. Byun. “Representing and Parameterizing Agent Behaviors”, Proceedings of Computer Animation, IEEE Computer Society, June 2002,Geneva, Switzerland, pp. 133-143.•J. Allbeck and N. Badler. “Toward Representing Agent Behaviors Modified by Personality and Emotion”, "Workshop Embodied conversational agents - let's specify and evaluate them!" at Autonomous Agents and Multiagent Systems 2002, Bologna, Italy.Other Publications:•J. Allbeck and N. Badler. “Representing and Parameterizing Agent Behaviors”. In "Life-like Characters: Tools, Affective Functions and Applications." Helmut Prendinger and Mitsuru Ishizuka, Eds. Springer, Germany, 2003, pp. 19-38 .•R. Bindiganavale. W. Schuler, J. Allbeck, N. Badler, A. Joshi, and M. Palmer. “Dynamically Altering Agent Behaviors Using Natural Language Instructions”. Proceedings ofAutonomous Agents 2000, pp. 293-300.•K. Ashida, S.J. Lee, J. Allbeck, H. Sun, N. Badler, and D. Metaxas. “Pedestrians: Creating Agent Behaviors through Statistical Analysis of Observation Data.” Proceedings of Computer Animation 2001, pp. 84-92.•N. Badler, R. Bindiganavale, J. Allbeck, W. Schuler, L. Zhao, M. Palmer. “Parameterized Action Representation for virtual human agents,” In J. Cassell, J. Sullivan, S. Prevost, and E.Churchill (eds.), Embodied Conversational Agents, MIT Press, 2000, pp. 256-284.•J. Allbeck, K. Kipper, C. Adams, W. Schuler, E. Zoubanova, N. Badler, M. Palmer, and A.Joshi. ACUMEN: Amplifying Control and Understanding of Multiple ENtities, Proceedings of Autonomous Agents and Multi-Agent Systems, ACM Press, July 2002, Bologna, Italy, pp.191-198。
恩智浦S32R274汽车雷达处理器应用指南说明书
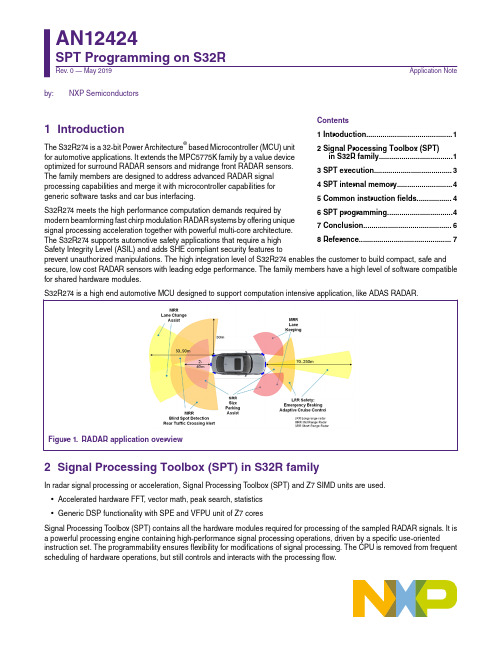
by:NXP Semiconductors1Introduction The S32R274 is a 32-bit Power Architecture ® based Microcontroller (MCU) unitfor automotive applications. It extends the MPC5775K family by a value deviceoptimized for surround RADAR sensors and midrange front RADAR sensors.The family members are designed to address advanced RADAR signalprocessing capabilities and merge it with microcontroller capabilities forgeneric software tasks and car bus interfacing.S32R274 meets the high performance computation demands required by modern beamforming fast chirp modulation RADAR systems by offering unique signal processing acceleration together with powerful multi-core architecture.The S32R274 supports automotive safety applications that require a highSafety Integrity Level (ASIL) and adds SHE compliant security features toprevent unauthorized manipulations. The high integration level of S32R274 enables the customer to build compact, safe and secure, low cost RADAR sensors with leading edge performance. The family members have a high level of software compatible for shared hardware modules.S32R274 is a high end automotive MCU designed to support computation intensive application, like ADAS RADAR.Figure 1.RADAR application overview2Signal Processing Toolbox (SPT) in S32R familyIn radar signal processing or acceleration, Signal Processing T oolbox (SPT) and Z7 SIMD units are used.•Accelerated hardware FFT , vector math, peak search, statistics•Generic DSP functionality with SPE and VFPU unit of Z7 coresSignal Processing T oolbox (SPT) contains all the hardware modules required for processing of the sampled RADAR signals. It is a powerful processing engine containing high-performance signal processing operations, driven by a specific use-orientedinstruction set. The programmability ensures flexibility for modifications of signal processing. The CPU is removed from frequent scheduling of hardware operations, but still controls and interacts with the processing flow.Contents1 Introduction (1)2 Signal Processing Toolbox (SPT)in S32R family....................................13 SPT execution......................................34 SPT internal memory...........................45 Common instruction fields.................46 SPT programming................................47 Conclusion. (6)8 Reference.............................................7AN12424SPT Programming on S32R Rev. 0 — May 2019Application NoteSPT is connected to the device by an advanced high performance master bus and a peripheral bus.Figure 2.SPT in S32R274 block diagramThe system bus master interface performs fast data transfers between external memory and local RAM.The purpose of the peripheral interface is to set configuration, get status information and basic control of SPT (start/stop, program pointer) and to trigger interrupts. It can also be used to exchange small amounts of the data between the CPU and the SPT , such as constant operands.Figure 3.SPT block diagramIt has the following features:•Acquisition of ADC samples—Capturing of ADC samples within programmed window—On-the-fly statistical computation—Supports MIPICSI2 interface•Provides HW acceleration for—FFT (8 - 4096 point)—Histogram calculation—Maximum and peak searchSignal Processing Toolbox (SPT) in S32R family—Mathematical operations on vector data•High-speed DMA data transfer—Supports system RAM, TCM and Flash memory transfers—Includes compression/decompression capability for reduction of storage footprint•Instruction based program flow—High-level commands for signal processing operations—Simple control commands—Local instruction buffer—Automatic instruction fetch from main memory—CPU interaction possible•CPU interruption notification•Watchdog•Debug Support - Single Stepping and Jamming ModeIt has three operation modes:1.STOP mode2.System Debug mode3.Normal mode3SPT executionThe SPT executes a list of instructions. These commands contain all the information to perform signal processing operations on data vectors consisting of a set of numbers. The instruction list is provided by the CPU in a memory buffer (SRAM or flash) and read by the SPT with autonomous triggered DMA operations. Preparation of command scripts is performed off-line duringdevelopment on a different system, such as a PC.Figure 4.SPT operation modelData as results or inputs of signal processing operations can be transferred between operand/twiddle RAM and system RAM or TCM by DMA operations. These kind of DMA operations are also scheduled by commands in the script.CPU application software functions may be invoked between signal processing operations. In order to synchronize these SW functions with the processing flow, interrupts and polling flags are provided, which may be activated as a result of specificcommands. In the same way, eDMA operations can be triggered from the SPT . The data transfer descriptors need to be prepared by application software.T o enable advanced and precisely timed pipelining of HW assisted operations, SPT command execution can also be synchronized with or triggered by events from CTE or MIPICSI2.SPT executionSPT internal memoryProgram execution is performed by a dedicated register machine. The program execution may be stalled at the end of each command and can be synchronized with events provided by the CTE or MIPICSI2. The CPU can stop and release program execution and execute its own instructions in the same time.The SPT command sequence is provided by CPU SW and written to a buffer in the system RAM or flash, where CSDMA fetches or alternatively transfers the list of instructions to the command queue.The program is executed sequentially, one command following the next in the chain with the exception being loops and asynchronous PDMA instruction. The end of a sequence is marked with a specific termination command. The start address of the instruction sequence is configured by application software using the peripheral interface.The command queue stores a number of instructions to be executed, which may be a shorter sequence than the complete instruction list. It maintains an instruction pointer to the current executed operation, which is incremented when the current operation is completed. This instruction pointer indicates the position in the complete instruction list sequence relative to the first instruction.Loop instructions are special cases, the program sequence may continue with a lower address depending on the state of the loop counter. The start and next command address of the loops are saved in special registers. Up to four nested loops are supported. Jump instructions or branch instructions are another case where the program may cause the program to branch to a non-contiguous address location. It is the responsibility of the assembler to ensure that the sanity of the program structure is not violated i.e. infinite loops, jumping into or out of a loop, etc.4SPT internal memorySPT contains internal memory resources namely, Operand RAM, Twiddle RAM and work registers. Out of these, only the work registers can be directly accessed via the peripheral interface and are visible on the SPT external memory map.The CPU can access these internal memory resources via the hardware accelerators. The instruction bitfields SRC_ADD and DEST_ADD point to these memories.The Twiddle RAM extends from location 0x4000 to 0x4FFF. However the area from 0x5000 to 0x7FFF is aliased to the Twiddle RAM i.e. it wraps around to point to the T widdle RAM. It should be noted that the memory accesses to the T widdle RAM should not cross the area from 0x4000 to 0x7FFF.The Operand RAM extends from location 0x8000 to 0xBFFF. But the area from 0xC000 to 0xFFFF is aliased to the Operand RAM. The memory accesses to the Operand RAM should not cross the area from 0x8000 to 0xFFFF.5Common instruction fieldsCommon instructions contains the following fields.•Opcode•Source and Destination address•Indirect Memory address•Source and destination address increment•Vector size•Input datatype/preprocessing6SPT programming6.1Programming based on RSDKNXP Radar SDK(RSDK) provides basic radar processing algorithms and device drivers for S32R hardware devices. Its purpose is to facilitate radar algorithm development (using SPT kernels, MA TLAB models), creation of higher level algorithms (starting from the basic blocks supplied with RSDK) and easy application development by integrating driver and platform support.Radar SDK (Radar SDK for S32R27 SPT accelerator ) could be downloaded from NXP website.RSDK SPT module consists of the SPT Driver, SPT Kernels software components.The SPT Driver serves as an interface between the user application running on the host CPU cores and the SPT hardware. The figure below shows a high-level block diagram of SPT software architecture. Its purpose is to enable the integration and executionof low-level microcode kernels on the SPT (Signal Processing T oolbox) accelerator for baseband radar signal processing.Figure 5.SPT software architectureThe SPT Kernels are individual precompiled routines of SPT code packed into a library, each implementing a part of the radar processing flow.T ogether, the SPT Driver and SPT Kernels library provide a software abstraction of the built-in SPT hardware functions (e.g. FFT ,Maximum Search, Histogram etc.) combined in a series of algorithms.The RSDK package also includes RSDK Sample Applications showing how to integrate these software components into the user code.6.2Programming based on graphic toolS32 Design Studio SPT graphical tool allows user to use graphical modeling workbench by leveraging the Eclipse Modeling technologies. It provides a workbench for model-based architecture engineering. Graphical tool equips teams who have to deal with complex architectures. The graphical tool includes everything necessary to easily create and manipulate models. The output of this tool is SPT assembler source code.The SPT graphical tool is integrated with the New S32DS Project wizard for devices which have SPT module. SPT1, SPT2 and SPT2.5 versions of SPT modules are supported. The SPT graphical tool can be used after project creation with the new graph tools project wizard. For detailed description of new project wizards, please read S32 Design Studio for Power Architecture, Version 2017.R1 reference manual.After the project is generated, SPT graphical tool windows could be gotten in IDE. User could drag 'Instructions', 'Flow' and 'Directives' from Palette window into working flow window.SPT programmingEach 'Instructions', 'Flow' or 'Directives' could change their setting in properties window. After finished the design of SPT working flow, generate SPT code through right click mouse.Figure 6.Generate project with SPT graphical toolFigure 7.SPT graphical tool windowsFigure 8.Example working flow and generate code7ConclusionThe SPT is a powerful processing engine containing high-performance signal processing operations driven by a specific instruction set. Its programmability ensures flexibility while removing the CPU from frequent scheduling of hardware operations, while still controlling and interacting with the processing flow. RSDK supports the API of SPT for customer and graphics tool for SPT programming could meet the flexible design request.8Reference•S32R274 Reference Manual•Radar SDK for S32R27 SPT accelerator •AN5375, S32R RADAR Signal CompressionHow To Reach Us Home Page: Web Support: /support Information in this document is provided solely to enable system and software implementers to use NXP products. There are no express or implied copyright licenses granted hereunder to design or fabricate any integrated circuits based on the information in this document. NXP reserves the right to make changes without further notice to any products herein.NXP makes no warranty, representation, or guarantee regarding the suitability of its products for any particular purpose, nor does NXP assume any liability arising out of the application or use of any product or circuit, and specifically disclaims any and all liability, including without limitation consequential or incidental damages. “Typical” parameters that may be provided in NXP data sheets and/or specifications can and do vary in different applications, and actual performance may vary over time. All operating parameters, including “typicals,” must be validated for each customer application by customer's technical experts. NXP does not convey any license under its patent rights nor the rights of others. NXP sells products pursuant to standard terms and conditions of sale, which can be found at the following address: / SalesTermsandConditions.While NXP has implemented advanced security features, all products may be subject to unidentified vulnerabilities. Customers are responsible for the design and operation of their applications and products to reduce the effect of these vulnerabilities on customer’s applications and products, and NXP accepts no liability for any vulnerability that is discovered. Customers should implement appropriate design and operating safeguards to minimize the risks associated with their applications and products.NXP, the NXP logo, NXP SECURE CONNECTIONS FOR A SMARTER WORLD, COOLFLUX, EMBRACE, GREENCHIP, HIT AG, I2C BUS, ICODE, JCOP, LIFE VIBES, MIFARE, MIFARE CLASSIC, MIFARE DESFire, MIFARE PLUS, MIFARE FLEX, MANTIS, MIFARE ULTRALIGHT, MIFARE4MOBILE, MIGLO, NTAG, ROADLINK, SMARTLX, SMARTMX, ST ARPLUG, TOPFET, TRENCHMOS, UCODE, Freescale, the Freescale logo, AltiVec, C‑5, CodeTEST, CodeWarrior, ColdFire, ColdFire+, C‑Ware, the Energy Efficient Solutions logo, Kinetis, Layerscape, MagniV, mobileGT, PEG, PowerQUICC, Processor Expert, QorIQ, QorIQ Qonverge, Ready Play, SafeAssure, the SafeAssure logo, StarCore, Symphony, VortiQa, Vybrid, Airfast, BeeKit, BeeStack, CoreNet, Flexis, MXC, Platform in a Package, QUICC Engine, SMARTMOS, Tower, TurboLink, and UMEMS are trademarks of NXP B.V. All other product or service names are the property of their respective owners. AMBA, Arm, Arm7, Arm7TDMI, Arm9, Arm11, Artisan, big.LITTLE, Cordio, CoreLink, CoreSight, Cortex, DesignStart, DynamIQ, Jazelle, Keil, Mali, Mbed, Mbed Enabled, NEON, POP, RealView, SecurCore, Socrates, Thumb, TrustZone, ULINK, ULINK2, ULINK-ME, ULINK-PLUS, ULINKpro, µVision, Versatile are trademarks or registered trademarks of Arm Limited (or its subsidiaries) in the US and/or elsewhere. The related technology may be protected by any or all of patents, copyrights, designs and trade secrets. All rights reserved. Oracle and Java are registered trademarks of Oracle and/or its affiliates. The Power Architecture and word marks and the Power and logos and related marks are trademarks and service marks licensed by .© NXP B.V. 2019.All rights reserved.For more information, please visit: Forsalesofficeaddresses,pleasesendanemailto:**********************Date of release: May 2019Document identifier: AN12424。
SomachineM258可编程控制器系统功能和变量库指南
40
SetLEDBehaviour:决定 LED 的行为. . . . . . . . . . . . . . . .
41
SetRTCDrift:每周调整实时时钟. . . . . . . . . . . . . . . . . .
43
EIO0000000589 06/2011
3
章 3 M258 PLCSystem 库数据类型 . . . . . . . . . . . .
64
LED_ID:SetLEDBehaviour 功能 LedId 参数代码 . . . . . . . .
65
LED_BHV:SetLEDBehaviour 功能 LedBhv 参数代码 . . . . . .
66
LED_BHV_ERROR:检测到的 SetLEDBehaviour 功能错误代码 . .
67
LED_COLOR:SetLEDBehaviour 功能 LedColor 参数代码 . . . .
68
RTCSETDRIFT_ERROR:检测到的 SetRTCDrift 功能错误代码 . .
69
DAY_OF_WEEK:SetRTCDrift 功能日期参数代码 . . . . . . . .
70
14
PLC_R:控制器只读系统变量 . . . . . . . . . . . . . . . . . . .
15
PLC_W:控制器读 / 写系统变量 . . . . . . . . . . . . . . . . . .
19
1.3 SERIAL_R 和 SERIAL_W 结构 . . . . . . . . . . . . . . . . . .
本文档中提供的信息包含有关此处所涉及产品之性能的一般说明和 / 或技术特性。 本文档并非用于 (也不代替)确定这些产品对于特定用户应用场合的适用性或可靠 性。任何此类用户或集成者都有责任就相关特定应用场合或使用方面对产品执行适 当且完整的风险分析、评估和测试。 Schneider Electric 或是其任何附属机构或子公 司对于误用此处包含的信息而产生的后果概不负责。如果您有关于改进或更正此出 版物的任何建议,或者从中发现错误,请通知我们。
M8U3Project

2.There are four steps to make string pictures.
3.We can choose big seashells and feathers to create feather and seashell pictures.
M8U3The world of colours and light
Unusual pictures
Teaching Aims:
1.Make the studentsunderstand the ways to create different types of unusual pictures
2.Make the studentswrite a short article about unusual pictures
●Make solid shapes by using circles of string
●Paint the string
Feather and seashell pictures
Feathers; small 5. _______; card; glue
●Thinkaboutthe pattern or picture
2.TeachingMethod:discuss in groups
Discuss the following questions:
What other things can be used to make unusual pictures?
How would youuse them to make unusual pictures?
M218编程手册 somachine软件V1.0
变量的 I/O 地址映射
将创建的变量映射到控制器的各个 I/O 通道,请执行以下步骤
步骤
说明
从 Devices 窗口的 Embedded Functions 部分双击 IO 标签, 1
如下图
11
设备专用窗口由不同的选项卡组成。为控制器的内制的 I/O 选 择本地 I/O Mapping 选项卡,如下图
6
Somachine 的 modbus 通讯功能示例 在 somachine 平台上,M218 控制器可通过 Modbus 的方式实现与 ATV31/312 等变频器 的通讯,实现的方法:串行端口的协议配置为 Modbus_Manager,需要通过调用功能块 的方式来收发数据; 下面以 M218 与 ATV31 的通讯为例进行讲解。 z 步骤一:配置串口的通讯参数,双击” Serial Line1” ,弹出参数属性页,可以 对通讯参数进行配置,如下图所示:
1
选择全部生成或单独编译 Application,可在编程界面下方看 到对应的编译信息描述
2
没有错误则表示程序编译通过,可以下到 PLC 中调试
程序的模拟调试 在没有 PLC 的情况下,Somachine 软件可以选择将程序脱机模拟调试。具体步骤如下
步骤
说明
1 选择在线菜单的仿真功能,如下图
15
选择在线,登录到 Application 上 2
1
6
在 Add Object 对话框中,从左侧列表中选择 POU 条目,并定 义此对象的类型和编程语言,如下图
2
然后可以为 POU 输入 Name。在 Type 区域中选择 Program 选 项。 从 Implementation language 列表中选择需要的编程语 言。在本示例中,我们将使用 Structured Text (ST)语言编程。 单击 Open 关闭对话框并打开 POU 编辑器窗口。结果:将在右 侧显示 POU 编辑器。如下图
VxWorks下网卡驱动程序的开发
VxWorks下网卡驱动程序的开发
高超; 郝燕玲; 吴润
【期刊名称】《《微计算机信息》》
【年(卷),期】2004(020)009
【摘要】本文首先从整体上分析VxWorks网卡驱动程序的原理和结构,然后深入地分析Rtl8139C网卡驱动程序的结构以及实现,本文对于VxWorks下的同类开发也有一定参考作用。
【总页数】3页(P10-11,18)
【作者】高超; 郝燕玲; 吴润
【作者单位】哈尔滨工程大学
【正文语种】中文
【中图分类】TP311.11
【相关文献】
1.基于VxWorks的SD卡驱动程序的设计与实现 [J], 贺小琳;张善从
2.基于VxWorks的CF卡驱动程序的研究与实现 [J], 高云;王冬;刘广武
3.VxWorks操作系统下CF卡驱动程序的开发 [J], 魏赫颖;钱亮;贾润
4.基于VxWorks的1553-pc104卡驱动程序的开发 [J], 张晓斌;杨伟;郑先成
5.VxWorks下LAN91C111网卡驱动程序的开发与分析 [J], 穆欣侃;李国祯
因版权原因,仅展示原文概要,查看原文内容请购买。
黑翼飞行模拟器用户手册说明书

IntroductionThe Blackwing BW 635RG is an ultralight two-seater aeroplane designed for recreational flying and training purposes. It features a sleek and modern design, with a composite airframe and a low-wing configuration. The Blackwing has a cruising speed of up to 120 knots and a range of approximately 700 nautical miles, making it suitable for both short and long-distance flights. The cockpit is equipped with state-of-the-art avionics, including a glass cockpit display and an autopilot system. The Blackwing is also known for its superior handling and stability, making it a popular choice among flying enthusiasts and flight schools. The BW 635RG is powered by the venerable Rotax 915 iS engine.Development Credits:Mal Cartwright Product LeadRuss White3D Modelling, Interior and Exterior TexturingJack Lavigne IntegrationHarry Stringer AnimationPropAir Flight Model and SystemsJordan Gough ManualWith special thanks to our Beta Testers:Rob Abernathy John BurgessNick Cooper John DowMatt McGee Darryl WightmanTable of ContentsIntroduction (2)Development Credits: (2)With special thanks to our Beta Testers: (2)Table of Contents (3)Notes on Hardware (4)Overview (5)Aircraft Limitations (6)Airspeed Limitations (6)Engine Limitations (6)Operating Conditions (6)Fuel (7)Other Limitations (7)Emergency Procedures (8)Engine Failure on the Take-off Roll (8)Engine Failure after Take-off (8)Glide Performance (8)Emergency Landing (9)Spin Recovery (9)Normal Procedures (10)Before Starting Engine (10)Starting Engine (10)Before Taxiing (11)Taxiing (11)Engine Runup (11)Before Take-off (11)Take-Off (12)Initial Climb (12)Cruise Climb (12)Cruise (12)Landing (13)Balked Landing (13)After Landing (13)Securing Aircraft (14)Basic Performance (15)Stall Speeds (15)Take-Off Performance (15)Landing Performance (16)Systems Description (17)Instrument Panel Layout (17)Switch Logic and Electrical System (18)Master Switch (18)Fuel Pump Switch (19)LAND/TAXI Switch (19)Strobe/Nav Switch (19)Electrical System Diagram (20)Engine (21)Propeller (21)Fuel (21)Notes on HardwareDue to the unusual 3-position switches in this aircraft, conventional hardware 2position toggle switches (eg. strobe or nav light switches) cannot be translated tothe single 3-position switch which combine these.Additionally, as this aircraft utilises a single level power control (throttle), conventional throttle/prop/mixture hardware may interfere with the function of this system, and not work as intended. It is recommended to place your propeller and mixture levers in the IDLE position, and not move them while the engine is running.OverviewThe Orbx BW 635RG has been developed using official documentation and Computer Aided Design (CAD) resources from Blackwing Sweden. As a result, the aeroplane has been created through masterful modelling, texturing, systems integration, and flight model development.Figure 1 – Aircraft 3-viewAircraft DimensionsLength 6.6m Height 2.2m Wingspan8.4mWeightsBasic Empty Weight 375kg Maximum Take-off Weight 600kg Maximum Fuel Capacity (Litres)130LThe content in this manual and the operation of the BW 635RG in Microsoft Flight Simulator strictly must not be used as reference material in any form for operating the real aircraft.Aircraft LimitationsAirspeed LimitationsAirspeed Description Airspeed (KIAS) RemarksVne Never Exceed Speed 157 Must not exceed this speed in any operation.Va Manoeuvring Speed 109 If full or abrupt control deflection is made, the airframe may be overstressed.Vfe1 Max flap extended speed20 degrees90 Maximum speed for flaps 20°Vfe2 Max flap extended speed35-45 degrees 70 Maximum speed for flaps 35-45°Vlo Maximum landing gearoperating speed 70Do not extended or retract the landing gearabove this speed.Vle Maximum landing gear extended speed 90 Do not exceed this speed with the landing gearalready down.Vs0 Stall speed flaps/gearextended 38 Stall speed with gear down/flaps >0° and in level flight at MTOWVs1 Stall speed clean 49 Stall speed flaps retracted, gear up and in level flight at MTOWEngine LimitationsEngineEngine Manufacturer Rotax Engine Model Rotax 915 iSMaximum Power Take-off (Max 5 min.) 141 hp Continuous 135 hpMaximum RPM Take-off (Max 5 min.) 5800 Continuous 5500Critical Altitude 15000ft AMSL Maximum OperatingAltitude23000ft AMSL Operating ConditionsAerobatic manoeuvres, flight in IFR conditionsand flights in icing conditions are prohibited inthis aircraft.FuelFuel TanksLeft Right Litres US Gal Litres US GalTotal Fuel in Tank 67.5 17.8 62.5 16.5Unusable Fuel 2.5 0.7 2.5 0.7 Total Useable Fuel in Tanks 66.5 17.6 61.5 16.2Other LimitationsMaximum demonstrated crosswind for the BW 635RG is 20 knots.Emergency ProceduresNote: The following procedures have been modified to be suitable for simulation. It does not cover emergencies that are a) not simulated and b) not reasonable. Checklist items from the real procedures have been omitted and these procedures must not under any circumstances be used for training purposes.Engine Failure on the Take-off RollThrottle: IDLEIgnition: OFFFuel Pump: MAIN (DOWN POS)Brakes: APPLYWhen stopped: SECURE AIRCRAFTEngine Failure after Take-offNose: IMMEDIATELY LOWERAirspeed: 65 KNOTSLanding Area: DETERMINE WITHIN 30° OF NOSEFlaps: USE AS REQUIREDLanding Gear: USE DESCRETIONFuel Selector: OFFIgnition: OFFMaster Switch: OFFGlide PerformanceThe BW 635RG, the approximate performance for a glide is 65 KIAS which willgive approximately a 545ft/min rate of descent in the clean configuration.Glide performance will degrade significantly on extension of flaps and landinggear.Emergency LandingAirspeed: 65 KIASField: PICK BEST OPTIONLanding Gear: USE DISCRETION DEPENDING ON FIELD TYPEFlaps: AS REQUIREDFuel Selector: OFFIgnition: OFFFuel Pump: MAIN (down)Master Switch: OFF BEFORE LANDINGSpin RecoveryThrottle: IDLEControl Stick: AILERON NEUTRALRudder: FULL OPPOSITE TO DIRECTION OF ROTATIONControl Stick: POSITIVELY FORWARD OF NEUTRALRudder: NEUTRAL WHEN ROTATION STOPSControl Stick: SMOOTHLY PULL OUT OF DIVEWARNING:INTENTIONAL SPINS ARE NOT APPROVED INTHIS AIRCRAFT.Normal ProceduresNote: The pre-flight inspection portion of the normal procedures has been removed due to impracticality in the simulator.Before Starting EngineIgnition: OFFMaster Switch: OFF (down)Backup Battery: OFF/AUTO (down)Landing Gear Lever: DOWNCircuit Breakers: INCanopy CLOSED (CLICKING THE LATCHON THE INSIDE LEFT SIDEWALL.) Starting EngineParking Brake: HOLD TOE BRAKES AND ENGAGE PARKINGBRAKEMaster Switch: ENGINE START (middle position)Fuel Selector: SETFuel Gauge: CHECKFuel Pump: BOTH (up)Ignition: BOTHNav Lights: STROBE (middle position)Throttle: SET ½-1 INCH OPENIgnition: STARTOil Pressure: GREEN WITHIN 10 SECWarnings: NONEBefore TaxiingMaster Switch: NORMAL OPERATION (up)Altimeter: SETAvionics: SETParking Brake: DISENGAGETaxiingInstruments: CHECKED (COMPASS/HSI/BALL/ATT) Engine RunupParking Brake: ENGAGERPM: 2500 RPMFuel Pump: CYCLE, CHECK FUEL PRESSUREIdle: CHECK IDLE 1800 +/- 100 RPM Before Take-offCanopy: CLOSED AND LOCKEDFlaps: 1 STAGE (20°)Elevator Trim: SET FOR TAKE-OFFEngine Instruments: NORMALLanding Light: ON (up)Controls: FULL FREE AND CORRECT MOVEMENTParking Brake: DISENGAGETake-OffThrottle: FULLControls: NEUTRAL45 Knots: ROTATEAccelerate: NOSE ON HORIZON, ACCEL TO 80 KIASPositive Rate of Climb: GEAR UPLanding Light: OFF (down)Flaps: RETRACT ABOVE 500’ AGLInitial ClimbThrottle: MAX CONTINUOUS (5500 RPM)Airspeed: 90 KIASFuel Pump: MAIN (down) ABOVE 500’ AGL Cruise ClimbThrottle: MAX CONTINUOUS (5500 RPM)Airspeed: 130 KIASCruiseThrottle: 55-75% PowerAirspeed: 120-157 KIAS (<130 KIAS IN TURB)LandingFuel: QTY CHECKEDFuel Selector: FULLEST TANKFuel Pump: BOTH (up position)Airspeed: 90 KIASFlaps: EXTEND FLAP 1 <90 KIASDownwind Airspeed: 65 KIASLanding Gear: DOWN @ 65 KIAS; CHECK 3 GREENLanding Light: ON (up position)Base Leg: EXTEND FLAP 2 < 65 KIASFinal Approach Airspeed: 60 KIASBalked LandingThrottle: SMOOTHLY INCREASEAirspeed: 60 KIASTrim: COURSE TRIM TO RELIEVE PRESSUREFlaps: RETRACT TO POSITION 1 (20°)Gear: UPTrim: TRIM FOR CLIMBAfter LandingFlaps: RETRACTExterior Lights: AS REQ’DFuel Pump: MAIN (down)Securing AircraftParking Brake: ENGAGEDThrottle: IDLESwitches: ALL OFF EXCEPT ACL AND MASTERIgnition: OFFNav Lights: OFF (down)Master Switch: OFFBasic PerformanceStall SpeedsMTOW 600kg | CG 32% MAC | Power Idle | Level FlightFlap Position Stall Speed (KIAS) 0° 49 20° 44 35° 39 45°38Take-Off PerformanceMTOW | ISA CONDITIONS | SEA LEVEL | FLAPS 1 (20°) | MTOW (600kg)Cruise PerformanceRunway Surface Ground RollOver 50ft Obstacleft mft mPaved Runway328 100 656 200 Unpaved (Grass) Runway 361110689208Pressure Altitude Power (%) TAS Fuel Flow LPH MAP (inHg) Endurance(hr)Range (nm) 500055 161 19.7 30 5.8 941 65 170 23.3 34.1 4.9 827 7517826.937.44.1738Landing PerformanceMTOW | ISA CONDITIONS | FLAPS 2 (35°) | MTOW (600kg) | Speed 1.3 x VsoRunway Surface Ground Roll Over 50ft Obstacle ft m ft mPaved Runway 525 160 951 290 Unpaved (Grass) Runway 558 170 984 300Systems Description Instrument Panel LayoutSwitch Logic and Electrical SystemThe electrical switches in the BW 635RG are 3-position switches. These are generally known as “DOWN”, “MIDDLE” and “UP”. They are briefly explained below.Master SwitchThe MASTER switch functions in a unique way, with the following switch logic:1.When the MASTER switch is DOWN, all battery power is off. There will beno electrical power provided to the aircraft.•Note: The engine CANNOT be shut down when the master switch isoff. Electrical power must be present for the engine to turn off.2.When the MASTER switch is in the MIDDLE (Engine Start) position, limitedsystem functionality will be present. The backup battery will be activatedand power the following systems:•Primary Flight Display•Compass•AHRS (Attitude Heading Reference System)•Radio3.When the MASTER switch is UP (Normal Operation), full electrical supplywill be provided to the aircraft. The following systems will be powered on: •Note: the engine CANNOT be started with the MASTER switch in theUP position. If the engine won’t start, check the switch is in theMIDDLE position•Multi-Function Display•Transponder•Autopilot•Audio panel•STBY instruments•Pitot Heat•Main battery is disconnected from running engine. Alternatorprovides power.See Section NORMAL PROCEDURES for positioning of the MASTER switch.Fuel Pump SwitchThe Fuel Pump switch also has some advanced logic to it, due to two fuel pumpsbeing present, however, to put it simply, it operates in the following way:1.In the DOWN position, the main fuel pump is in use.2.In the MIDDLE position, the auxiliary fuel pump is in use.3.In the UP position, both fuel pumps will be on.LAND/TAXI SwitchThe LAND/TAXI switch powers the Taxi and Landing lights. It operates in the following logic:1.In the DOWN position, both lights will be OFF.2.In the MIDDLE position, the taxi light will switch on when the landinggear is extended.3.In the UP position, the Landing Light will switch on when the landinggear is extended.Strobe/Nav SwitchThe Strobe/Nav switch powers the Navigation (Red/Green) and Strobe (flashingwhite) lights. It operates in the following logic:1.In the DOWN position, both lights will be OFF.2.In the MIDDLE position, the STROBE light will be on.3.In the UP position, both the strobe and Nav lights will be on.Electrical System DiagramThe BW 635RG’s electrical system is modelled in the following way in Microsoft Flight Simulator.Because the starter system is connected to the BACKUP BUS, this means you cannot start the engine with the MASTER switch in the UP position, due to the BACKUP BUS being disconnected from the circuit once the MAIN BAT BUS is powered.Page 21 of 21User Guide v1.0 –RevisionEngineThe BW 635RG is powered by the Rotax 915iS. The Rotax 915iS is a four-stroke, four-cylinder, fuel-injected, turbocharged aircraft engine with a maximum power output of141 horsepower. The engine utilizes electronic fuel injection (EFI) technology toprovide precise fuel delivery and improved fuel efficiency. It also features a modernliquid-cooling system and a dual electronic ignition system for reliable performance.The Rotax 915iS engine has a maximum operating RPM of 5,200, with a recommended continuous operation range of 5,000 RPM or less.PropellerThe propeller is a 3-blade wood-composite design, which is hydraulically adjustable for operation at various pitch angles, controlled independently of the pilot. The propeller is linked to the engine through an electronically controlled governor, where RPM isadjusted in accordance with the position of the throttle control. This pitch curve cannot be adjusted in flight, however is designed to ensure maximum performance in allphases of flight.FuelBoth wings have fuel tanks, which are fed to the engine via electric fuel pumps. Fuelsystem information is fed via sensors to the Garmin avionics suite and can be viewedon the displays inside the cockpit.AIRPLANE WEIGHTSBasic Empty Weight……………………….…375 KgMaximum Takeoff Weight…………………..600 KgMaximum Fuel Weight………………………...95 Kg Maximum Landing Weight………………….600 Kg TANK USABLE FUEL LEFT WING TANK67.5 litres 17.8 US Gallons RIGHT WING TANK62.5 litres 16.5 US Gallons TOTAL 130 litres34.3 US GallonsFUEL CAPACITY AIRSPEEDS Never Exceed Speed ……….…………….173 KIAS Max Structural Cruising Speed…………..156 KIAS Maneuvering Speed MTOW……………….109 KIAS Initial Climb………………………………………80 KIASBest Angle Climb……………………………….75 KIASBest Rate of Climb……………………………..90 KIASMax Flap Ext 20°……………………..............90 KIASMax Flap Ext 35-45°……………………………70 KIASMax Landing Gear Operation……………….70 KIASMax Landing Gear Extended………………..90 KIASPlanned Cruise TAS………………………….130 KIASFinal Approach Speed………………………..60 KIAS POWERPLANT LIMITATIONSENGINE LIMITS (RPM)Take-off (5 Minutes)………....5800 RPM Max Continuous……………….5500 RPMALTITUDE LIMITSMaximum Operating Altitude………………23 000ftFor Microsoft Flight Simulator Use Only0-12023 Orbx Simulation Systems Pty. Ltd BW 635RG QUICK REFERENCESHEETIssued: 21 Apr 2023Revised: 21 Apr 20230-2PROCEDURESBEFORE STARTING ENGINEPreflight Inspection………………………….COMPLETECrew Briefing………………………………….COMPLETEIgnition…………………………………………………….OFFMaster Switch…………………………………………..OFFBackup Battery …..…………………………….OFF/AUTOLanding Gear Lever………………………………..DOWNCircuit Breakers…………………………………………..IN Canopy………………………………………………CLOSED STARTING ENGINEArea……………………………………………………..CLEARParking Brake……………….HOLD TOE BRAKES ANDENGAGEMaster Switch …..……………….ENGINE START (MID)Fuel Selector…………………………………………….SETFuel Pump………………………………………BOTH (UP)Ignition………………………………………………….BOTHExternal Lights……………………………………..AS REQThrottle ………………………..………..Τ12-1 INCH OPENIgnition………………………………………………….START AFTER START Oil Pressure.…………………………………………RISING Master Switch ……………………………..NORMAL (UP)Radios………………………………………………………SET Altimeter…………………………………………………..SET ATIS and Clearance…………………………..OBTAINEDBEFORE TAXIBrakes/Park Brake ………………………….DISENGAGEFlight Instruments……………………………..CHECKEDCompass…………………………………………CHECKED BEFORE TAKEOFFCanopy/Harnesses………………………………SECURE Flaps…………………………………….……1 STAGE (20°)Trim ..……………………………………SET FOR TAKEOFF Flight Instruments………………………………………SET Engine Instruments………………CHECKED NORMAL Avionics…………………………………………………….SET External Lights………………………………………AS REQ Flight Controls…………..FULL, FREE AND CORRECT Takeoff Safety Brief………………………….DELIVERED TAKEOFFBrakes/Park Brake………………………….DISENGAGEPower…………SMOOTHLY INCREASE TO MAXIMUM45 knots………………………………………………ROTATEAccelerate……….…NOSE ON HORIZON, TO 80 KTSPositive Rate of Climb………………………….GEAR UPLanding Light.……………………………….OFF (DOWN)Flaps ………………………..RETRACT ABOVE 500’ AGLMEMORY ITEMS 2023 Orbx Simulation Systems Pty. Ltd ENGINE RUN UP Parking Brake ……………………………………..ENGAGE Engine Instruments……………………………CHECKED Engine RPM…………………………………SET 2500 RPM Fuel Pump…………………………………………….CYCLE Idle …………………..…..CHECK IDLE 1800 ±100RPM Navigation Equipment …..…………………………….SETFor Microsoft Flight Simulator Use OnlyIssued: 21 Apr 2023Revised: 21 Apr 2023AFTER TAKEOFF Engine Instruments……………………..WITHIN LIMITS Climb Speed…………………………………………90 KIAS Fuel Pump………….MAIN (DOWN ) ABOVE 500’ AGL0-3CRUISEPower….……………………………………….SET 55-75%Airspeed…..……….120-157KTS (<130KTS IN TURB.)DESCENTAltimeter…………………………………………………..SETFuel Selector………………………………FULLEST TANKPower Lever………………….AS REQUIRED FOR RODApproach Brief………………………………PLETE BEFORE LANDINGBrakes……………………………………………………..OFFFuel ………….………………………………QTY CHECKEDFuel Selector………………………………FULLEST TANK Fuel Pump……….………………………………BOTH (UP)LANDINGDOWNWINDAirspeed….………………………………………….90 KIASFlaps….………………………………………STAGE 1 (20°)Airspeed………….………………………………….65 KIASLanding Gear…..…………………….DOWN @ 65 KIASCHECK 3 GREENLanding Light………………………………………ON (UP)BASEFlaps…………………………… STAGE 2 (35°) < 65 KIASFINALAirspeed………….………………………………….60 KIASTouchdown ……………………….MAIN WHEELS FIRSTStick………………………………………………FULL BACK Brakes…………………………………………………..APPLYAFTER LANDING Flaps………………………………………………..RETRACT Landing Lights…………………………………………..OFFFuel Pump….………………………………MAIN (DOWN)SHUTDOWNParking Brake ……………………………………..ENGAGE Throttle……………………………………………………IDLE Switches….………………………….OFF EXCL. MASTERIgnition..…………………………………………………..OFFLights….……………………………………….OFF (DOWN)Master Switch..……………………………..OFF (DOWN)MEMORY ITEMS 2023 Orbx Simulation Systems Pty. Ltd For Microsoft Flight Simulator Use OnlyPROCEDURESIssued: 21 Apr 2023Revised: 21 Apr 2023。
Merako系列GNSS开源研发平台Merako G L

文件编号:HY-QR-YF-004 版本号:A/0
文档密级:内部公开 共 47 页,第 3 页
文档类型: 技术文档 文档名称: Merako 系列 GNSS 开源研发平台使用说明(Merako-G1L)
1.1 背景 .........................................................................................................................................5 1.2 现有各种开源 GNSS 研发平台和环境.................................................................................5 1.3 Merako 系列 GNSS 开源研发平台之特点与优势 ..............................................................6 1.4 Merako-G1L 研发平台构成..................................................................................................6
Merako 系列 GNSS 开源研发平台 Merako-G1L 使用说明书
深圳市华颖锐兴科技有限公司
HYRISING TECH CO., LTD
文档类型: 技术文档 文档名称: Merako 系列 GNSS 开源研发平台使用说明(Merako-G1L)
序号 1 2 3 4
版本 V0R1 V0R2 V1R0 V1R1
附录 1:HYX 接口协议 ............................................................................................ 30
uCOSII函数说明之–OSTaskCreate()与OSTaskCreateExt()

uCOSII函数说明之–OSTaskCreate()与OSTaskCreateExt()1. OSTaskCreate()OSTaskCreate()建⽴⼀个新任务,可以在多任务环境启动之前,或者运⾏任务中建⽴任务。
注意,ISR中禁⽌建⽴任务,⼀个任务必须为⽆限循环结构。
源代码如下:#if OS_TASK_CREATE_EN > 0 /* 条件编译,是否允许任务的创建 */INT8U OSTaskCreate (void (*task)(void *pd), /* 函数指针,void *pd为函数的参数 */void *pdata, /* 建⽴任务时,传递的参数 */OS_STK *ptos, /* 指向堆栈任务栈顶的指针 */INT8U prio) /* 任务优先级 */{#if OS_CRITICAL_METHOD == 3 /* Allocate storage for CPU status register */OS_CPU_SR cpu_sr;#endifOS_STK *psp;INT8U err;#if OS_ARG_CHK_EN > 0if (prio > OS_LOWEST_PRIO) { /* 参数检查,优先级是否处于允许优先级之内 */return (OS_PRIO_INVALID);}#endifOS_ENTER_CRITICAL(); /* 关中断 */if (OSTCBPrioTbl[prio] == (OS_TCB *)0) { /* 判断任务的优先级是否存在,如不存在,设置任 */OSTCBPrioTbl[prio] = (OS_TCB *)1; /* 务优先级为1设置优先级后,就可以开中断了, *//* 不⽤担⼼冲突,因为该优先级已经被占了 */OS_EXIT_CRITICAL();psp = (OS_STK *)OSTaskStkInit(task, pdata, ptos, 0);/* 初始化堆栈,此函数与具体的硬件有关,OS_CPU_C.C */err = OS_TCBInit(prio, psp, (OS_STK *)0, 0, 0, (void *)0, 0); /* 详见此函数的说明 */if (err == OS_NO_ERR) {OS_ENTER_CRITICAL();OSTaskCtr++; /* 任务计数器加1,统计运⾏的任务数 */OS_EXIT_CRITICAL();if (OSRunning == TRUE) { /* 如果是在任务运⾏过程中新建任务,需要进⾏ */OS_Sched(); /* 任务调度,保证优先级最⾼的任务处于运⾏态 */}} else {OS_ENTER_CRITICAL();OSTCBPrioTbl[prio] = (OS_TCB *)0;/* 如果任务创建失败,优先级设置为0,放弃该 *//* 任务的优先级保证别的任务创建时可以使⽤ *//* 此优先级 */OS_EXIT_CRITICAL();}return (err); /* 创建任务失败,返回错误代码 */}OS_EXIT_CRITICAL();return (OS_PRIO_EXIST); /* 返回OS_PRIO_EXIST,告知任务优先级已经存在 */}#endif2. OSTaskCreateExt()OSTaskCreateExt()为OSTaskCreate()的扩展函数,允许更多的内容设置。
TRACE32 异常控制系统文档说明书
FEATURE OVERVIEWUsing TRACE32 for IEC 62304TRACE32 for IEC 62304 at a Glance• TRACE32 Tool Qualification Support-Kit streamlines TRACE32 tool qualification effort and costs.• TRACE32 TQSK is fully featured, field proven and ready to cover new use casesand requirements.• TRACE32 TQSK Customer Interface provides full support and service around tool qualification.• All test suites run in the target environment and are fully multicore aware.• Test Suite Coverage includes statement, decision, condition, function and call coverage, as well as MC/DC.• TRACE32 Instruction Simulator, TRACE32 Debug and Trace Tools, USB Debug and Trace provide comprehensive tool support throughout all project phases.Website-LinksTRACE32 Trusted Tools for Functional Safety /trusted_tools.htmlTQSK Customer Portal /register_tqsk.htmlTRACE32 Code Coverage /coverage.htmlTRACE32 Instruction Set Simulator /sim.htmlThe TRACE32 Tool Qualification Support-Kit (TQSK) provides everything needed to qualify use in safety-related software projects.Figure 1: The 2-stage qualification processCertification ArtifactsDocumentsTest SuiteTool Verification and Validation Supplement for Integration toOperational EnvironmentTest Suite DocumentsTest ReportTesting in Operational EnvironmentTest Report Testing inTSSTCTest Suite Simulator TriCore(paid)DSMDeveloper SafetyManualTSCTest Suite Coverage(free)TSDTest Suite Debug(free)$$TSSATest Suite Simulator Arm(paid)Test Suite SimulatorUpon customer request, Lauterbach also provides test suites for its Arm and TriCore Instruction Set Simulators. A qualified instruction set simulator is an accepted test environment in the software module testing phase of the project (see also figure 3) and offers the following advantages:• Product software qualification can start before product hardware is available.• The qualification of the product software can be well organized even in a distributed team, becauseeverything necessary is purely software-based.• If bottlenecks occur during this phase due to a lack of development hardware or debug/trace tools, additional test benches can be easily equipped with simulators.Test Suite DebugThe Test Suite Debug includes all basic debugging functionality such as target configuration, programming onchip and NOR flashes, loading programs, setting breakpoints and reading/writing of memory and variables.Figure 3: TRACE32 tool use in code coverage qualification。
873M编程线程程序指南说明书

Installation Instructions873M Programming CableIMPORTANT: SAVE THESE INSTRUCTIONS FOR FUTURE USE.Discrete Sensor Instructions:Adjusting Set PointsThe 873M provides five modes of operation for detecting a target object in discrete mode.•Window Mode, N.O: Two set points are taught in defined sensing range creating a sensing window. Once a targetobject passes through the window, output triggers on.•Window Mode, N.C.: Two set points are taught in the defined sensing range creating a sensing window. Outputis initially ON. Once a target object passes through thewindow, output triggers off.•One set point, N.O.: One set point is taught within a defined sensing range of the sensor with the output off.When a target passes between the sensor and the taughtset point, the output triggers and turns on.•One set point, N.C: One set point is taught within a defined sensing range of the sensor while the output is on.When a target passes between the sensor and the taughtset point, output triggers and turns off.•Object Presence Mode: Also known as resetting to factory defaults settings. Once the sensor is taught, all setpoints are removed and the sensor returns to the factorydefault specified range depending on the catalog number.Any object within a specified sensing range (50…300 mmor 70…800mm) will be detected.Window Mode, N.O.1.Place the target at the desired near-set point.2.Connect to 0V DC (–) using the white wire, or press A1 on theoptional programming cable.3.Set the target to at the desired far-set point.4.Connect to 10…30V DC (+) using the white wire, or press A2on the optional programming cable.Window Mode, N.C.1.Place the target at the desired near-set point.2.Connect to 10…30V DC (+) using the white wire, or press A2on the optional programming cable.3.Set the target to the desired far-set point.4.Connect to 0V DC (–) using the white wire, or press A1 on theoptional programming cable.One Set Point, N.O1.Place target at the desired set point.2.Connect to 10…30V DC (+) using the white wire, or press A2on the optional programming cable.3.Cover sensor head with your hand or remove all objects fromthe sensing field.4.Connect to 0V DC (–) using the white wire, or press A1 on theoptional programming cable.One Set Point, N.C1.Place target at the desired set point.2.Connect to 0V DC (–) using the white wire, or press A1 on theoptional programming cable.3.Cover sensor head with your hand or remove all objects fromthe sensing field.4.Connect to 10…30V DC (+) using the white wire, or press A2on the optional programming cable.Object Presence Mode (Restore Factory Defaults)1.Cover sensor head with your hand or remove all objects fromthe sensing field.2.Connect to 0V DC (–) using the white wire, or press A1 on theoptional programming cable.3.Connect to 10…30V DC (+) using the white wire, or press A2on the optional programming cable.Discrete Sensor LED IndicatorsOperating Mode Red LED Yellow LED Green LED Teach ModeTarget detected One flash Continuous flashOffNo target detectedFlashes OffTarget marginal (invalid teach)Standard ModeTarget presentOffOnOnTarget not present OffCopyright © 2012 Rockwell Automation, Inc. All Rights Reserved.10000300616 Ver 00August 2012Analog Sensor Instructions: Teaching Set Point Limits•The analog output mode returns a 4…20 mA or 0…10V DC signal proportional to the measured value.•The upper and lower adjustment range can be scaled to distance-fixed window.•The sensor is taught using an easy four-step remote teach process or an optional programming cable.•Two output functions: rising and falling ramp.Rising Ramp: current or voltage values rise as the distance increases between the target and the sensor. Follow the steps below in the order they appear.1.Place the target at the lower (near) set point limit.2.Connect to 0V DC [–] using the white wire, or press A1 on the optional programming cable.3.Place the target at the upper (far) set point limit.4.Connect to 10…30V DC [+] using the white wire, or press A2 on the optional programming cable.Falling Ramp: current or voltage values fall as the distance increases between the target and the sensor. Follow the steps below in the order they appear.1.Place the target at the lower (far) set point limit.2.Connect to 10…30V DC [+] using the white wire, or press A2 on the optional programming cable.3.Place the target at the upper (near) set point limit.4.Connect to 0V DC [–] using the white wire, or press A1 on the optional programming cable.Analog Sensor LED IndicatorsOperating Mode Red LEDYellow LEDGreen LEDTeach Mode Target Detected One flash Continuous flash OffNo Target Detected FlashesOffTarget Marginal (invalid teach)Standard Mode Target present OffOn OnTarget not presentOff。
EFM8UB3-SLTB005A Quick-Start Guide
QSG158: EFM8UB3-SLTB005A Quick-Start GuideThe EFM8UB3-SLTB005A is an excellent starting point to get fa-miliar with the EFM8 Universal Bee microcontrollers.The kit contains sensors and peripherals demonstrating some of the MCU's many capa-bilities. The kit can also serve as a starting point for application development.KIT CONTENTS •EFM8UB3 Thunderboard UB3•1 x micro USB cable•Getting Started cardEFM8 USB Port (HID Demo)EFM8 Debug and Detection PortPower Selection Switch1. Getting StartedInstall Simplicity StudioSimplicity Studio is a free software suite needed to start developing your application. Download the latest version of Simplicity Studio from the Silicon Labs website:/simplicity-studio1.Download the software and follow the installation instructions.2.The installation wizard automatically selects the recommended software for the connected device or selected product line. To ad-just the installed software, click the [Update Software] button in the [Launcher] area. In the dialog that opens, select the desired software under the [SDKs] tab and tools under the [Tools] tab.3.Finalize the installation.Preprogrammed demo1.The Thunderboard UB3 has a pre-programmed demo that you can explore while Simplicity Studio is installing. This demo is theHID Keyboard program.2.To run the demo, connect the micro USB cable between the kit and computer. Use the usb connector labeled [EFM8 USB], and setthe Power Selection Switch to the [EFM8] position.3.The HID keyboard demo enumerates as a USB HID device. Pressing either push button on the kit will send one character in thestring "HID Keyboard". Pressing Caps Lock or Num Lock on the host keyboard will change the color of the LED.Detect Your Device1.Provide power and a debug connection to the kit by connecting the provided USB cable between the kit and a computer. Use theUSB connector labeled [DBG USB].2.Ensure the power selector switch on the STK is in the [DBG] position.3.Click the [Refresh] button in the [Device] area. The board may take some time to appear due to driver installations for the debugadapter.4.Once an item with the name [J-Link Silicon Labs] appears, expand by clicking the arrow, and verify that the detected devicesmatches the kit. Click the EFM8UB3-SLTB005A.5.The [Launcher] view will now display a number of available resources, including pre-compiled demos, examples, documentation,tools, and other resources.2. ResourcesDemosDemos are a quick and easy way to evaluate a device without compiling or debugging code. Demos can be accessed using the [Get-ting Started]>[Demos] area in the launcher.Software ExamplesSoftware examples can be imported, compiled, and downloaded using the [Getting Started]>[Software Examples] area in the launch-er.Software DocumentationSoftware documentation provides more information on the firmware libraries available for the selected device. Access these documents using the [Documentation] area in the launcher.Other DocumentationKit documentation, application notes, and device documentation can be found using the [Documentation] area of the launcher.Community and SupportHave a question? Visit the community by clicking the [Resources]>[Silicon Labs Community] area of the launcher.Silicon Laboratories Inc.400 West Cesar Chavez Austin, TX 78701USASimplicity StudioOne-click access to MCU and wireless tools, documentation, software, source code libraries & more. Available for Windows, Mac and Linux!IoT Portfolio /IoTSW/HW/simplicityQuality /qualitySupport and CommunityDisclaimerSilicon Labs intends to provide customers with the latest, accurate, and in-depth documentation of all peripherals and modules available for system and software implementers using or intending to use the Silicon Labs products. Characterization data, available modules and peripherals, memory sizes and memory addresses refer to each specific device, and "Typical" parameters provided can and do vary in different applications. Application examples described herein are for illustrative purposes only. Silicon Labs reserves the right to make changes without further notice and limitation to product information, specifications, and descriptions herein, and does not give warranties as to the accuracy or completeness of the included information. Silicon Labs shall have no liability for the consequences of use of the information supplied herein. This document does not imply or express copyright licenses granted hereunder to design or fabricate any integrated circuits. The products are not designed or authorized to be used within any Life Support System without the specific written consent of Silicon Labs. A "Life Support System" is any product or system intended to support or sustain life and/or health, which, if it fails, can be reasonably expected to result in significant personal injury or death. Silicon Labs products are not designed or authorized for military applications. Silicon Labs products shall under no circumstances be used in weapons of mass destruction including (but not limited to) nuclear, biological or chemical weapons, or missiles capable of delivering such weapons.Trademark InformationSilicon Laboratories Inc.® , Silicon Laboratories®, Silicon Labs®, SiLabs® and the Silicon Labs logo®, Bluegiga®, Bluegiga Logo®, Clockbuilder®, CMEMS®, DSPLL®, EFM®, EFM32®, EFR, Ember®, Energy Micro, Energy Micro logo and combinations thereof, "the world’s most energy friendly microcontrollers", Ember®, EZLink®, EZRadio®, EZRadioPRO®, Gecko®, ISOmodem®, Micrium, Precision32®, ProSLIC®, Simplicity Studio®, SiPHY®, Telegesis, the Telegesis Logo®, USBXpress®, Zentri and others are trademarks or registered trademarks of Silicon Labs. ARM, CORTEX, Cortex-M3 and THUMB are trademarks or registered trademarks of ARM Holdings. Keil is a registered trademark of ARM Limited. All other products or brand names mentioned herein are trademarks of their respective holders.。
ue3工程化开发方案
UE3工程化开发方案在游戏开发中,为了提高开发效率,降低维护成本,采用工程化开发方案已经成为一个标准。
UE3是一款非常流行的游戏引擎,本文将介绍UE3的工程化开发方案。
概述UE3的工程化开发主要包括以下环节:1.版本管理系统2.构建系统3.自动化测试4.单元测试在每个环节中,我们都需要使用相应的工具和技术。
版本管理版本管理是游戏开发中最基础的一步。
在多人协作的开发过程中,版本管理可以帮助我们掌控代码的变化,追踪每个人员贡献的代码,解决代码冲突等问题。
UE3中最常见的版本管理工具为Perforce。
Perforce是一款功能强大的版本管理工具,除了版本管理外,它还提供了分布式团队协作、自动生成日志等功能。
Perforce可以非常方便地与UE3集成,使得开发人员可以在UE3中直接提交和获取代码,提升了开发效率。
构建系统构建系统主要用于将源代码和资源文件打包成一个可执行文件。
在UE3中,构建系统使用了UnrealBuildTool来完成构建工作。
UnrealBuildTool是UE3的编译工具,它可以根据不同的平台和配置生成对应的游戏可执行文件。
在构建系统的使用中,我们需要注意以下几点:1.确保所有代码及资源文件都正确打包。
2.确保平台和配置都正确设置。
3.构建完成后进行测试验证,确保游戏可执行文件正确。
自动化测试自动化测试可以帮助我们在开发的过程中快速找出代码中的问题,提高开发效率。
在UE3中,我们可以使用UnrealScript来编写自动化测试脚本,然后使用UnrealFrontEnd来运行测试脚本。
自动化测试需要注意以下几点:1.编写测试脚本时需要覆盖所有可能的测试用例。
2.运行测试脚本时确保代码已经编译并且没有其他问题影响测试结果。
3.在测试结果出现问题时需要及时处理并解决。
单元测试单元测试是构建系统的重要一步,可以帮助我们验证代码的正确性,降低维护成本。
在UE3中,我们可以使用Unittest++来编写单元测试。
基于多核处理器的无锁零拷贝数据包转发框架

基于多核处理器的无锁零拷贝数据包转发框架肖月振;华蓓【期刊名称】《计算机工程》【年(卷),期】2013(000)012【摘要】为突破高速软件路由器转发路径中存储访问方面的性能瓶颈,分析PacketShader和Netmap 2个软件路由器的转发结构和存在的问题,设计一个基于多核处理器的零拷贝包转发框架MapRouter。
采用零拷贝技术去除包转发路径中的包拷贝,并借助并发无锁队列设计一个适合多端口间数据包零拷贝转发的包缓冲区管理方案。
将高度优化的包 I/O 驱动、包缓冲区回收机制、无锁队列实现等一系列优化措施相结合,以提高转发速度。
实验结果表明,对于不包括IP路由表查找的最小转发,MapRouter在模拟的两端口路由器上可以达到10 Gb/s的转发速度,与PacketShader和Netmap相比,其转发速度更高、CPU利用率更低。
%To work out performance bottleneck relating to memory accessing in forwarding path of high-speed software router, after introducing the forwarding frameworks of two software routers--PacketShader and Netmap, and analyzing their problems, this paper presents MapRouter, a zero-copy forwarding framework based on multi-core processors. MapRouter eliminates packet copying using zero-copy technology, and solves the problem of packet buffer management among multiple ports based on currently lock-free First In First Out(FIFO). By exploiting a series of optimization techniques including highly-optimized packet I/O driver, efficient packet buffer recycling mechanism, and high-efficient lock-freeFIFO queue implementation, MapRouter achieves 10 Gb/s minimal forwarding(without IP address lookup) throughput on a two-port software router, which is higher than that of PacketShader and Netmap, meanwhile it has much lower CPU utilization ratio.【总页数】6页(P35-39,53)【作者】肖月振;华蓓【作者单位】中国科学技术大学计算机科学与技术学院,合肥 230026;中国科学技术大学计算机科学与技术学院,合肥 230026【正文语种】中文【中图分类】TP393【相关文献】1.基于Caffe的嵌入式多核处理器深度学习框架并行实现 [J], 高榕;张良;梅魁志2.基于 TILE64多核处理器的并行数据压缩研究 [J], 马斯;朱科军;章红宇;谌炫3.基于多核处理器的任务记录数据并行压缩算法 [J], 许晋;胡泽林;杨智;王颖4.基于多核处理器的边缘数据采集分析节点架构 [J], 张润滋; 王劲林; 陈晓; 叶晓舟5.基于多核处理器的边缘数据采集分析节点架构 [J], 张润滋;王劲林;陈晓;叶晓舟因版权原因,仅展示原文概要,查看原文内容请购买。
恩智浦半导体 实时边缘Yocto Project用户指南说明书

恩智浦半导体文档编号:RTEYOCTOUG 用户指南第2.0版,2021年7月29日实时边缘Yocto Project用户指南概述本文档介绍如何使用Yocto Project构建环境为i.MX和QorIQ(Layerscape)板构建实时边缘镜像。
它介绍了实时边缘软件Yocto层及其用法。
Yocto Project是一个专注于嵌入式Linux®操作系统开发的开源协作项目。
有关Yocto Project的更多信息,请参见Yocto Project页面:。
Yocto Project主页上有几个文档详细描述了如何使用该系统。
要使用没有实时边缘发布层的基本Yocto Project,请按照/docs/current/yocto-project-qs/yocto-project-qs.html中的《Yocto Project快速入门》中的说明进行操作。
实时边缘层基于i.MX Yocto Project和LSDK Yocto版本。
• i.MX Yocto Project提供i.MX板支持。
有关更多信息,请参见i.MX Yocto Project用户指南.pdf。
• LSDK Yocto Project提供Layerscape板支持。
有关更多信息,请参见https:/// docs/en/user-guide /LSDKYOCTOUG.pdf。
用于构建镜像的文件存储在层中。
层包含不同类型的自定义,并且来自不同的来源。
层中的一些文件称为要素。
Yocto Project要素包含检索源代码、构建和打包组件的机制。
以下列表显示了此版本中使用的层。
实时边缘层• 动态层:包括i.MX和Layerscape相关要素的更新。
├──imx-layer└──qoriq-layer• 要素-扩展:包括实时网络、实时系统和工业的要素。
• 要素-恩智浦:实时边缘镜像要素注意1.1 最终用户许可协议在实时边缘Yocto Project社区BSP的设置环境过程中,会显示恩智浦最终用户许可协议(EULA)。
Native Instruments MASCHINE MK3 用户手册说明书

The information in this document is subject to change without notice and does not represent a commitment on the part of Native Instruments GmbH. The software described by this docu-ment is subject to a License Agreement and may not be copied to other media. No part of this publication may be copied, reproduced or otherwise transmitted or recorded, for any purpose, without prior written permission by Native Instruments GmbH, hereinafter referred to as Native Instruments.“Native Instruments”, “NI” and associated logos are (registered) trademarks of Native Instru-ments GmbH.ASIO, VST, HALion and Cubase are registered trademarks of Steinberg Media Technologies GmbH.All other product and company names are trademarks™ or registered® trademarks of their re-spective holders. Use of them does not imply any affiliation with or endorsement by them.Document authored by: David Gover and Nico Sidi.Software version: 2.6.11 (11/2017)Hardware version: MASCHINE MK3Special thanks to the Beta Test Team, who were invaluable not just in tracking down bugs, but in making this a better product.NATIVE INSTRUMENTS GmbH Schlesische Str. 29-30D-10997 Berlin Germanywww.native-instruments.de NATIVE INSTRUMENTS North America, Inc. 6725 Sunset Boulevard5th FloorLos Angeles, CA 90028USANATIVE INSTRUMENTS K.K.YO Building 3FJingumae 6-7-15, Shibuya-ku, Tokyo 150-0001Japanwww.native-instruments.co.jp NATIVE INSTRUMENTS UK Limited 18 Phipp StreetLondon EC2A 4NUUKNATIVE INSTRUMENTS FRANCE SARL 113 Rue Saint-Maur75011 ParisFrance SHENZHEN NATIVE INSTRUMENTS COMPANY Limited 203B & 201B, Nanshan E-Commerce Base Of Innovative ServicesShi Yun Road, Shekou, Nanshan, Shenzhen China© NATIVE INSTRUMENTS GmbH, 2017. All rights reserved.Table of Contents1Welcome to MASCHINE (23)1.1MASCHINE Documentation (24)1.2Document Conventions (25)1.3New Features in MASCHINE 2.6.11 (27)2Basic Concepts (29)2.1Important Names and Concepts (29)2.2Adjusting the MASCHINE User Interface (32)2.2.1Adjusting the Size of the Interface (32)2.2.2Switching between Ideas View and Arranger View (33)2.2.3Showing/Hiding the Browser (34)2.2.4Minimizing the Mixer (34)2.2.5Showing/Hiding the Control Lane (35)2.3Common Operations (36)2.3.1Using the 4-Directional Push Encoder (36)2.3.2Pinning a Mode on the Controller (37)2.3.3Pinning a Mode on the Controller (38)2.3.4Undo/Redo (39)2.3.5List Overlay for Selectors (41)2.3.6Zoom and Scroll Overlays (42)2.3.7Focusing on a Group or a Sound (42)2.3.8Switching Between the Master, Group, and Sound Level (47)2.3.9Navigating Channel Properties, Plug-ins, and Parameter Pages in the Control Area.482.3.9.1Extended Navigate Mode on Your Controller (53)2.3.10Using Two or More Hardware Controllers (56)2.3.11Touch Auto-Write Option (58)2.4Native Kontrol Standard (60)2.5Stand-Alone and Plug-in Mode (62)2.5.1Differences between Stand-Alone and Plug-in Mode (62)2.5.2Switching Instances (63)2.5.3Controlling Various Instances with Different Controllers (64)2.6Preferences (65)2.6.1Preferences – General Page (66)2.6.2Preferences – Audio Page (70)2.6.3Preferences – MIDI Page (74)2.6.4Preferences – Default Page (77)2.6.5Preferences – Library Page (81)2.6.6Preferences – Plug-ins Page (89)2.6.7Preferences – Hardware Page (94)2.6.8Preferences – Colors Page (98)2.7Integrating MASCHINE into a MIDI Setup (100)2.7.1Connecting External MIDI Equipment (100)2.7.2Sync to External MIDI Clock (101)2.7.3Send MIDI Clock (102)2.8Syncing MASCHINE using Ableton Link (103)2.8.1Connecting to a Network (103)2.8.2Joining and Leaving a Link Session (103)2.9Using a Pedal with the MASCHINE Controller (105)2.10File Management on the MASCHINE Controller (105)3Browser (107)3.1Browser Basics (107)3.1.1The MASCHINE Library (107)3.1.2Browsing the Library vs. Browsing Your Hard Disks (108)3.2Searching and Loading Files from the Library (109)3.2.1Overview of the LIBRARY Pane (109)3.2.2Selecting or Loading a Product and Selecting a Bank from the Browser (114)3.2.2.1Browsing by Product Category Using MASCHINE MK3 (118)3.2.2.2Browsing by Product Vendor Using MASCHINE MK3 (119)3.2.3Selecting a Product Category, a Product, a Bank, and a Sub-Bank (119)3.2.3.1Selecting a Product Category, a Product, a Bank, and a Sub-Bank on theController (124)3.2.4Selecting a File Type (125)3.2.5Choosing Between Factory and User Content (126)3.2.6Selecting Type and Mode Tags (127)3.2.7List and Tag Overlays in the Browser (133)3.2.8Performing a Text Search (135)3.2.9Loading a File from the Result List (135)3.3Additional Browsing Tools (140)3.3.1Loading the Selected Files Automatically (140)3.3.2Auditioning Instrument Presets (142)3.3.3Auditioning Samples (143)3.3.4Loading Groups with Patterns (144)3.3.5Loading Groups with Routing (145)3.3.6Displaying File Information (145)3.4Using Favorites in the Browser (146)3.5Editing the Files’ Tags and Properties (152)3.5.1Attribute Editor Basics (152)3.5.2The BANK Page (154)3.5.3The TYPES and MODES Pages (155)3.5.4The PROPERTIES Page (157)3.6Loading and Importing Files from Your File System (158)3.6.1Overview of the FILES Pane (158)3.6.2Using Favorites (160)3.6.3Using the Location Bar (161)3.6.4Navigating to Recent Locations (162)3.6.5Using the Result List (163)3.6.6Importing Files to the MASCHINE Library (166)3.7Locating Missing Samples (168)3.8Using Quick Browse (170)4Managing Sounds, Groups, and Your Project (175)4.1Overview of the Sounds, Groups, and Master (175)4.1.1The Sound, Group, and Master Channels (176)4.1.2Similarities and Differences in Handling Sounds and Groups (177)4.1.3Selecting Multiple Sounds or Groups (178)4.2Managing Sounds (183)4.2.1Loading Sounds (185)4.2.2Pre-listening to Sounds (186)4.2.3Renaming Sound Slots (187)4.2.4Changing the Sound’s Color (187)4.2.5Saving Sounds (189)4.2.6Copying and Pasting Sounds (191)4.2.7Moving Sounds (194)4.2.8Resetting Sound Slots (196)4.3Managing Groups (197)4.3.1Creating Groups (198)4.3.2Loading Groups (200)4.3.3Renaming Groups (201)4.3.4Changing the Group’s Color (201)4.3.5Saving Groups (203)4.3.6Copying and Pasting Groups (205)4.3.7Reordering Groups (208)4.3.8Deleting Groups (209)4.4Exporting MASCHINE Objects and Audio (210)4.4.1Saving a Group with its Samples (211)4.4.2Saving a Project with its Samples (212)4.4.3Exporting Audio (214)4.5Importing Third-Party File Formats (221)4.5.1Loading REX Files into Sound Slots (221)4.5.2Importing MPC Programs to Groups (222)5Playing on the Controller (226)5.1Adjusting the Pads (226)5.1.1The Pad View in the Software (226)5.1.2Choosing a Pad Input Mode (228)5.1.3Adjusting the Base Key (231)5.1.4Using Choke Groups (233)5.1.5Using Link Groups (235)5.2Adjusting the Key, Choke, and Link Parameters for Multiple Sounds (238)5.3Adjusting the Base Key (239)5.4Playing Tools (240)5.4.1Mute and Solo (241)5.4.2Choke All Notes (245)5.4.3Groove (246)5.4.4Level, Tempo, Tune, and Groove Shortcuts on Your Controller (248)5.4.5Tap Tempo (252)5.5Performance Features (253)5.5.1Overview of the Perform Features (253)5.5.2Selecting a Scale and Creating Chords (256)5.5.3Scale and Chord Parameters (256)5.5.4Creating Arpeggios and Repeated Notes (262)5.5.5Swing on Note Repeat / Arp Output (267)5.6Using Lock Snapshots (268)5.6.1Creating a Lock Snapshot (268)5.6.2Using Extended Lock (269)5.6.3Updating a Lock Snapshot (269)5.6.4Recalling a Lock Snapshot (270)5.6.5Morphing Between Lock Snapshots (270)5.6.6Deleting a Lock Snapshot (271)5.6.7Triggering Lock Snapshots via MIDI (272)5.7Using the Smart Strip (274)5.7.1Pitch Mode (274)5.7.2Modulation Mode (275)5.7.3Perform Mode (275)5.7.4Notes Mode (276)6Working with Plug-ins (277)6.1Plug-in Overview (277)6.1.1Plug-in Basics (277)6.1.2First Plug-in Slot of Sounds: Choosing the Sound’s Role (281)6.1.3Loading, Removing, and Replacing a Plug-in (281)6.1.3.1Browser Plug-in Slot Selection (287)6.1.4Adjusting the Plug-in Parameters (290)6.1.5Bypassing Plug-in Slots (290)6.1.6Using Side-Chain (292)6.1.7Moving Plug-ins (292)6.1.8Alternative: the Plug-in Strip (294)6.1.9Saving and Recalling Plug-in Presets (294)6.1.9.1Saving Plug-in Presets (295)6.1.9.2Recalling Plug-in Presets (296)6.1.9.3Removing a Default Plug-in Preset (297)6.2The Sampler Plug-in (298)6.2.1Page 1: Voice Settings / Engine (300)6.2.2Page 2: Pitch / Envelope (302)6.2.3Page 3: FX / Filter (305)6.2.4Page 4: Modulation (307)6.2.5Page 5: LFO (309)6.2.6Page 6: Velocity / Modwheel (311)6.3Using Native Instruments and External Plug-ins (313)6.3.1Opening/Closing Plug-in Windows (313)6.3.2Using the VST/AU Plug-in Parameters (316)6.3.3Setting Up Your Own Parameter Pages (317)6.3.4Using VST/AU Plug-in Presets (322)6.3.5Multiple-Output Plug-ins and Multitimbral Plug-ins (325)7Working with Patterns (326)7.1Pattern Basics (326)7.1.1Pattern Editor Overview (327)7.1.2Navigating the Event Area (333)7.1.3Following the Playback Position in the Pattern (335)7.1.4Jumping to Another Playback Position in the Pattern (337)7.1.5Group View and Keyboard View (338)7.1.6Adjusting the Arrange Grid and the Pattern Length (341)7.1.7Adjusting the Step Grid and the Nudge Grid (344)7.2Recording Patterns in Real Time (349)7.2.1Recording Your Patterns Live (349)7.2.2The Record Prepare Mode (352)7.2.3Using the Metronome (353)7.2.4Recording with Count-in (354)7.2.5Quantizing while Recording (356)7.3Recording Patterns with the Step Sequencer (356)7.3.1Step Mode Basics (356)7.3.2Editing Events in Step Mode (359)7.3.3Recording Modulation in Step Mode (361)7.4Editing Events (361)7.4.1Editing Events with the Mouse: an Overview (362)7.4.2Creating Events/Notes (365)7.4.3Selecting Events/Notes (366)7.4.4Editing Selected Events/Notes (372)7.4.5Deleting Events/Notes (378)7.4.6Cut, Copy, and Paste Events/Notes (381)7.4.7Quantizing Events/Notes (383)7.4.8Quantization While Playing (385)7.4.9Doubling a Pattern (386)7.4.10Adding Variation to Patterns (387)7.5Recording and Editing Modulation (391)7.5.1Which Parameters Are Modulatable? (392)7.5.2Recording Modulation (393)7.5.3Creating and Editing Modulation in the Control Lane (395)7.6Creating MIDI Tracks from Scratch in MASCHINE (401)7.7Managing Patterns (403)7.7.1The Pattern Manager and Pattern Mode (403)7.7.2Selecting Patterns and Pattern Banks (406)7.7.3Creating Patterns (408)7.7.4Deleting Patterns (410)7.7.5Creating and Deleting Pattern Banks (411)7.7.6Naming Patterns (413)7.7.7Changing the Pattern’s Color (415)7.7.8Duplicating, Copying, and Pasting Patterns (416)7.7.9Moving Patterns (419)7.7.10Adjusting Pattern Length in Fine Increments (420)7.8Importing/Exporting Audio and MIDI to/from Patterns (421)7.8.1Exporting Audio from Patterns (421)7.8.2Exporting MIDI from Patterns (422)7.8.3Importing MIDI to Patterns (425)8Audio Routing, Remote Control, and Macro Controls (434)8.1Audio Routing in MASCHINE (435)8.1.1Sending External Audio to Sounds (436)8.1.2Configuring the Main Output of Sounds and Groups (441)8.1.3Setting Up Auxiliary Outputs for Sounds and Groups (446)8.1.4Configuring the Master and Cue Outputs of MASCHINE (450)8.1.5Mono Audio Inputs (456)8.1.5.1Configuring External Inputs for Sounds in Mix View (457)8.2Using MIDI Control and Host Automation (461)8.2.1Triggering Sounds via MIDI Notes (462)8.2.2Triggering Scenes via MIDI (469)8.2.3Controlling Parameters via MIDI and Host Automation (471)8.2.4Selecting VST/AU Plug-in Presets via MIDI Program Change (479)8.2.5Sending MIDI from Sounds (480)8.3Creating Custom Sets of Parameters with the Macro Controls (484)8.3.1Macro Control Overview (485)8.3.2Assigning Macro Controls Using the Software (486)8.3.3Assigning Macro Controls Using the Controller (492)9Controlling Your Mix (494)9.1Mix View Basics (494)9.1.1Switching between Arrange View and Mix View (494)9.1.2Mix View Elements (495)9.2The Mixer (497)9.2.1Displaying Groups vs. Displaying Sounds (498)9.2.2Adjusting the Mixer Layout (500)9.2.3Selecting Channel Strips (501)9.2.4Managing Your Channels in the Mixer (502)9.2.5Adjusting Settings in the Channel Strips (504)9.2.6Using the Cue Bus (508)9.3The Plug-in Chain (510)9.4The Plug-in Strip (511)9.4.1The Plug-in Header (513)9.4.2Panels for Drumsynths and Internal Effects (515)9.4.3Panel for the Sampler (516)9.4.4Custom Panels for Native Instruments Plug-ins (519)9.4.5Undocking a Plug-in Panel (Native Instruments and External Plug-ins Only) (523)9.5Controlling Your Mix from the Controller (525)9.5.1Navigating Your Channels in Mix Mode (526)9.5.2Adjusting the Level and Pan in Mix Mode (527)9.5.3Mute and Solo in Mix Mode (528)9.5.4Plug-in Icons in Mix Mode (528)10Using the Drumsynths (529)10.1Drumsynths – General Handling (530)10.1.1Engines: Many Different Drums per Drumsynth (530)10.1.2Common Parameter Organization (530)10.1.3Shared Parameters (533)10.1.4Various Velocity Responses (533)10.1.5Pitch Range, Tuning, and MIDI Notes (533)10.2The Kicks (534)10.2.1Kick – Sub (536)10.2.2Kick – Tronic (538)10.2.3Kick – Dusty (541)10.2.4Kick – Grit (542)10.2.5Kick – Rasper (545)10.2.6Kick – Snappy (546)10.2.7Kick – Bold (548)10.2.8Kick – Maple (550)10.2.9Kick – Push (551)10.3The Snares (553)10.3.1Snare – Volt (555)10.3.2Snare – Bit (557)10.3.3Snare – Pow (559)10.3.4Snare – Sharp (560)10.3.5Snare – Airy (562)10.3.6Snare – Vintage (564)10.3.7Snare – Chrome (566)10.3.8Snare – Iron (568)10.3.9Snare – Clap (570)10.3.10Snare – Breaker (572)10.4The Hi-hats (574)10.4.1Hi-hat – Silver (575)10.4.2Hi-hat – Circuit (577)10.4.3Hi-hat – Memory (579)10.4.4Hi-hat – Hybrid (581)10.4.5Creating a Pattern with Closed and Open Hi-hats (583)10.5The Toms (584)10.5.1Tom – Tronic (586)10.5.2Tom – Fractal (588)10.5.3Tom – Floor (592)10.5.4Tom – High (594)10.6The Percussions (595)10.6.1Percussion – Fractal (597)10.6.2Percussion – Kettle (600)10.6.3Percussion – Shaker (602)10.7The Cymbals (606)10.7.1Cymbal – Crash (608)10.7.2Cymbal – Ride (610)11Using the Bass Synth (613)11.1Bass Synth – General Handling (614)11.1.1Parameter Organization (614)11.1.2Bass Synth Parameters (616)12Using Effects (618)12.1Applying Effects to a Sound, a Group or the Master (618)12.1.1Adding an Effect (618)12.1.2Other Operations on Effects (627)12.1.3Using the Side-Chain Input (629)12.2Applying Effects to External Audio (632)12.2.1Step 1: Configure MASCHINE Audio Inputs (632)12.2.2Step 2: Set up a Sound to Receive the External Input (635)12.2.3Step 3: Load an Effect to Process an Input (637)12.3Creating a Send Effect (639)12.3.1Step 1: Set Up a Sound or Group as Send Effect (639)12.3.2Step 2: Route Audio to the Send Effect (644)12.3.3 A Few Notes on Send Effects (646)12.4Creating Multi-Effects (647)13Effect Reference (650)13.1Dynamics (651)13.1.1Compressor (651)13.1.2Gate (655)13.1.3Transient Master (659)13.1.4Limiter (661)13.1.5Maximizer (665)13.2Filtering Effects (668)13.2.1EQ (668)13.2.2Filter (671)13.2.3Cabinet (675)13.3Modulation Effects (676)13.3.1Chorus (676)13.3.2Flanger (678)13.3.3FM (680)13.3.4Freq Shifter (681)13.3.5Phaser (683)13.4Spatial and Reverb Effects (685)13.4.1Ice (685)13.4.2Metaverb (687)13.4.3Reflex (688)13.4.4Reverb (Legacy) (690)13.4.5Reverb (692)13.4.5.1Reverb Room (692)13.4.5.2Reverb Hall (695)13.4.5.3Plate Reverb (698)13.5Delays (700)13.5.1Beat Delay (700)13.5.2Grain Delay (703)13.5.3Grain Stretch (705)13.5.4Resochord (707)13.6Distortion Effects (709)13.6.1Distortion (709)13.6.2Lofi (711)13.6.3Saturator (713)13.6.4Analog Distortion (716)13.7Perform FX (718)13.7.1Filter (719)13.7.2Flanger (721)13.7.3Burst Echo (724)13.7.4Reso Echo (726)13.7.5Ring (729)13.7.6Stutter (731)13.7.7Tremolo (734)13.7.8Scratcher (737)14Working with the Arranger (740)14.1Arranger Basics (740)14.1.1Navigating the Arranger (743)14.1.2Following the Playback Position in Your Project (745)14.1.3Jumping to Other Sections (746)14.2Using Ideas View (748)14.2.1Scene Overview (748)14.2.2Creating Scenes (750)14.2.3Assigning and Removing Patterns (751)14.2.4Selecting Scenes (755)14.2.5Deleting Scenes (757)14.2.6Creating and Deleting Scene Banks (758)14.2.7Clearing Scenes (759)14.2.8Duplicating Scenes (759)14.2.9Reordering Scenes (761)14.2.10Making Scenes Unique (762)14.2.11Appending Scenes to Arrangement (763)14.2.12Naming Scenes (764)14.2.13Changing the Color of a Scene (765)14.3Using Arranger View (767)14.3.1Section Management Overview (767)14.3.2Creating Sections (772)14.3.3Assigning a Scene to a Section (773)14.3.4Selecting Sections and Section Banks (774)14.3.5Reorganizing Sections (778)14.3.6Adjusting the Length of a Section (779)14.3.6.1Adjusting the Length of a Section Using the Software (781)14.3.6.2Adjusting the Length of a Section Using the Controller (782)14.3.7Assigning and Removing Patterns (783)14.3.8Duplicating Sections (785)14.3.8.1Making Sections Unique (786)14.3.9Removing Sections (787)14.3.10Renaming Scenes (789)14.3.11Clearing Sections (790)14.3.12Creating and Deleting Section Banks (791)14.3.13Enabling Auto Length (792)14.3.14Looping (793)14.3.14.1Setting the Loop Range in the Software (793)14.4Playing with Sections (794)14.4.1Jumping to another Playback Position in Your Project (795)14.5Triggering Sections or Scenes via MIDI (796)14.6The Arrange Grid (798)14.7Quick Grid (800)15Sampling and Sample Mapping (801)15.1Opening the Sample Editor (801)15.2Recording a Sample (802)15.2.1Opening the Record Page (802)15.2.2Selecting the Source and the Recording Mode (803)15.2.3Arming, Starting, and Stopping the Recording (806)15.2.5Checking Your Recordings (810)15.2.6Location and Name of Your Recorded Samples (813)15.3Editing a Sample (814)15.3.1Using the Edit Page (814)15.3.2Audio Editing Functions (820)15.4Slicing a Sample (828)15.4.1Opening the Slice Page (829)15.4.2Adjusting the Slicing Settings (830)15.4.3Live Slicing (836)15.4.3.1Live Slicing Using the Controller (836)15.4.3.2Delete All Slices (837)15.4.4Manually Adjusting Your Slices (837)15.4.5Applying the Slicing (844)15.5Mapping Samples to Zones (850)15.5.1Opening the Zone Page (850)15.5.2Zone Page Overview (851)15.5.3Selecting and Managing Zones in the Zone List (853)15.5.4Selecting and Editing Zones in the Map View (858)15.5.5Editing Zones in the Sample View (862)15.5.6Adjusting the Zone Settings (865)15.5.7Adding Samples to the Sample Map (872)16Appendix: Tips for Playing Live (875)16.1Preparations (875)16.1.1Focus on the Hardware (875)16.1.2Customize the Pads of the Hardware (875)16.1.3Check Your CPU Power Before Playing (875)16.1.4Name and Color Your Groups, Patterns, Sounds and Scenes (876)16.1.5Consider Using a Limiter on Your Master (876)16.1.6Hook Up Your Other Gear and Sync It with MIDI Clock (876)16.1.7Improvise (876)16.2Basic Techniques (876)16.2.1Use Mute and Solo (876)16.2.2Use Scene Mode and Tweak the Loop Range (877)16.2.3Create Variations of Your Drum Patterns in the Step Sequencer (877)16.2.4Use Note Repeat (877)16.2.5Set Up Your Own Multi-effect Groups and Automate Them (877)16.3Special Tricks (878)16.3.1Changing Pattern Length for Variation (878)16.3.2Using Loops to Cycle Through Samples (878)16.3.3Using Loops to Cycle Through Samples (878)16.3.4Load Long Audio Files and Play with the Start Point (878)17Troubleshooting (879)17.1Knowledge Base (879)17.2Technical Support (879)17.3Registration Support (880)17.4User Forum (880)18Glossary (881)Index (889)1Welcome to MASCHINEThank you for buying MASCHINE!MASCHINE is a groove production studio that implements the familiar working style of classi-cal groove boxes along with the advantages of a computer based system. MASCHINE is ideal for making music live, as well as in the studio. It’s the hands-on aspect of a dedicated instru-ment, the MASCHINE hardware controller, united with the advanced editing features of the MASCHINE software.Creating beats is often not very intuitive with a computer, but using the MASCHINE hardware controller to do it makes it easy and fun. You can tap in freely with the pads or use Note Re-peat to jam along. Alternatively, build your beats using the step sequencer just as in classic drum machines.Patterns can be intuitively combined and rearranged on the fly to form larger ideas. You can try out several different versions of a song without ever having to stop the music.Since you can integrate it into any sequencer that supports VST, AU, or AAX plug-ins, you can reap the benefits in almost any software setup, or use it as a stand-alone application. You can sample your own material, slice loops and rearrange them easily.However, MASCHINE is a lot more than an ordinary groovebox or sampler: it comes with an inspiring 7-gigabyte library, and a sophisticated, yet easy to use tag-based Browser to give you instant access to the sounds you are looking for.What’s more, MASCHINE provides lots of options for manipulating your sounds via internal ef-fects and other sound-shaping possibilities. You can also control external MIDI hardware and 3rd-party software with the MASCHINE hardware controller, while customizing the functions of the pads, knobs and buttons according to your needs utilizing the included Controller Editor application. We hope you enjoy this fantastic instrument as much as we do. Now let’s get go-ing!—The MASCHINE team at Native Instruments.MASCHINE Documentation1.1MASCHINE DocumentationNative Instruments provide many information sources regarding MASCHINE. The main docu-ments should be read in the following sequence:1.MASCHINE Getting Started: This document provides a practical approach to MASCHINE viaa set of tutorials covering easy and more advanced tasks in order to help you familiarizeyourself with MASCHINE.2.MASCHINE Manual (this document): The MASCHINE Manual provides you with a compre-hensive description of all MASCHINE software and hardware features.Additional documentation sources provide you with details on more specific topics:▪Controller Editor Manual: Besides using your MASCHINE hardware controller together withits dedicated MASCHINE software, you can also use it as a powerful and highly versatileMIDI controller to pilot any other MIDI-capable application or device. This is made possibleby the Controller Editor software, an application that allows you to precisely define all MIDIassignments for your MASCHINE controller. The Controller Editor was installed during theMASCHINE installation procedure. For more information on this, please refer to the Con-troller Editor Manual available as a PDF file via the Help menu of Controller Editor.▪Online Support Videos: You can find a number of support videos on The Official Native In-struments Support Channel under the following URL: https:///NIsupport-EN We recommend that you follow along with these instructions while the respective appli-cation is running on your computer.Other Online Resources:If you are experiencing problems related to your Native Instruments product that the supplied documentation does not cover, there are several ways of getting help:▪Knowledge Base▪User Forum▪Technical Support▪Registration SupportYou will find more information on these subjects in the chapter Troubleshooting.1.2Document ConventionsThis section introduces you to the signage and text highlighting used in this manual. This man-ual uses particular formatting to point out special facts and to warn you of potential issues. The icons introducing these notes let you see what kind of information is to be expected:This document uses particular formatting to point out special facts and to warn you of poten-tial issues. The icons introducing the following notes let you see what kind of information can be expected:Furthermore, the following formatting is used:▪Text appearing in (drop-down) menus (such as Open…, Save as… etc.) in the software and paths to locations on your hard disk or other storage devices is printed in italics.▪Text appearing elsewhere (labels of buttons, controls, text next to checkboxes etc.) in the software is printed in blue. Whenever you see this formatting applied, you will find the same text appearing somewhere on the screen.▪Text appearing on the displays of the controller is printed in light grey. Whenever you see this formatting applied, you will find the same text on a controller display.▪Text appearing on labels of the hardware controller is printed in orange. Whenever you see this formatting applied, you will find the same text on the controller.▪Important names and concepts are printed in bold.▪References to keys on your computer’s keyboard you’ll find put in square brackets (e.g.,“Press [Shift] + [Enter]”).►Single instructions are introduced by this play button type arrow.→Results of actions are introduced by this smaller arrow.Naming ConventionThroughout the documentation we will refer to MASCHINE controller (or just controller) as the hardware controller and MASCHINE software as the software installed on your computer.The term “effect” will sometimes be abbreviated as “FX” when referring to elements in the MA-SCHINE software and hardware. These terms have the same meaning.Button Combinations and Shortcuts on Your ControllerMost instructions will use the “+” sign to indicate buttons (or buttons and pads) that must be pressed simultaneously, starting with the button indicated first. E.g., an instruction such as:“Press SHIFT + PLAY”means:1.Press and hold SHIFT.2.While holding SHIFT, press PLAY and release it.3.Release SHIFT.Unlabeled Buttons on the ControllerThe buttons and knobs above and below the displays on your MASCHINE controller do not have labels.1234567812345678The unlabeled buttons and knobs on the MASCHINE controller.For better reference, we applied a special formatting here: throughout the document, the ele-ments are capitalized and numbered, so the buttons above the displays are written Button 1 to Button 8, while the knobs under the displays are written Knob 1 to Knob 8. E.g., whenever you see an instruction such as “Press Button 2 to open the EDIT page,” you’ll know it’s the second button from the left above the displays.1.3New Features in MASCHINE2.6.11The following two new features have been added to MASCHINE 2.6.11 and are only aimed at MASCHINE MK3 users:▪Introduction of the General, Audio, MIDI and Hardware Preferences direct from the MA-SCHINE MK3 controller using the SETTINGS button. For more information on using the Preferences from the hardware, refer to each section of the following chapter: ↑2.6, Prefer-ences.。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Unit 3Task &Project一、高考必会短语1. range v.(在一定范围或幅度内)变动,变化;排列,将……排成行;n.系列,住宿条件从经济旅馆至豪华宾馆不等。
②Estimates of the damage range between $1 million and $ 5 million.估计损失在100万到500万元之间。
③There will be an increase in the range of 0 to 3 per cent.将会有0到3个百分点的增长幅度。
④This was outside the range of his experience. 这超出了他的阅历。
⑤He shouted angrily at anyone within range. 他看见谁,就对谁吼叫。
⑥The cat stayed well out of range of the children. 这只猫离孩子们远远的。
⑦These missiles have a range of 300 miles. 这些导弹的射程为300英里。
2. abandon vt.(1)抛弃,放弃,戒除(2)离弃,遗弃,背弃(3)纵情,恣意① Snow forced many drivers to abandon their vehicles.大雪迫使许多驾驶员弃车步行。
② The baby had been abandoned by its mother. 这个婴儿被母亲遗弃了。
③ He abandoned himself to despair. 他陷入绝望。
④ I have abandoned hope of any reconciliation. 我已对任何和解不抱希望。
⑤ We had to abandon holding the game due to the bad weather.由于天气不好,我们只好放弃比赛。
⑥ The children played with water with abandon. 孩子们尽情地玩水。
比较:abandon, leave, desert & quitabandon指因外界压力或影响永久舍弃自己所感兴趣的食物或人。
leave “离开,遗留”,是普通用词,一般没有感情色彩。
desert 指某人或某物在困难的时候或困境中被人背弃。
quit 指突然或出其不意地放弃,往往带有感情意味。
Some children leave school at 16. 有些学生16岁就毕业离校了。
She was deserted by her husband. 她被丈夫遗弃了。
If I don’t get more money, I’ll quit. 如不给我加薪,我就辞职。
3. talented adj. 有才能的,天才的,有才干的talented players/ artists/ youngsters 天才运动员/ 艺术家/ 神童be talented intalent n. 天才,天赋,天资have a talent for① Mozart had a great talent for music. 莫扎特有音乐天赋。
② She showed considerable talent for getting what she wanted.她很有天资,能够心想事成。
③ He is a great talent. 他是个了不起的人才。
4. distribute v. 分发,分配某事物,散发distribute 在表示“分发”的意思时,同义词为give out, 在表示“散发”时,同义词为spread。
distribution n. 分发,分配distribute sth to / among… 把某物分给……①The organization distributed food and blankets to the earthquake victims.这个机构向地震灾民分发了食品和毯子。
②The money was distributed among schools in the area.这笔款项是在本地区的学校中分配的。
③Make sure your weight is evenly distributed. 注意让你的体重分配均匀。
④The map shows the distribution of this species across the world.地图上标明了该物种在全世界的分布情况。
5. adore vt. 热爱,爱慕adorable adj. 迷人的,讨人喜欢的adoring adj. 表示爱慕的adoration n. 爱慕,敬爱adore sb./sth. 爱慕,喜欢某人/ 物adore doing sth. 喜爱做某事①What an adorable child ! 多可爱的小孩啊!②He waved to the adoring crowds. 他向崇拜他的群众挥手致意。
③He gazed at her with pure adoration. 他一往情深地注视着她。
④I simply adore his music!我简直太喜爱他的音乐了!⑤She adores working with children. 她热爱为儿童工作。
②The walk has given me a good appetite. 散步让我胃口大开。
③He suffered from headaches, insomnia and loss of appetite.他患头痛,失眠和食欲不振。
④Don’t spoil your appetite by eating between meals.不要在两餐之间吃东西,以免影响胃口。
②He admitted having stolen the car. 他招认偷了那辆汽车。
③His conduct admits of no excuse. 他的行为无可宽恕。
④The theatre admits only 250 people. 这家戏院只能容纳250人。
⑤Every year, about sixty new boys and girls are admitted to this school.这所学校每年招收六十名男女新生。
为了找到治疗这种疾病的新方法,他做了大量实验。
②He experimented on rats. 他用老鼠做实验。
③The scientists are experimenting with new methods. 科学家们正在试验新方法。
④Find out by experiment what foods the baby likes.通过试验来弄清楚婴儿喜欢吃什么。
比较:trial, experiment & test三者都含有“证明、发现某事物的过程或方式”的意思。
①trial指“对人或物进行试验以确定其效果或价值等”。
Y ou will succeed by trial and error. 经过反复实验,你会成功的。
②experiment指“为研究某事物的发生或为获得新知识而进行仔细试验的过程”。
We experimented until we succeeded in mixing the right color.我们不断进行实验,直至将所需颜色调配成功。
③test指“通过试验、检查、使用、比较等就其是否正确、合格等方面作出决定”。
None of this range of cosmetics has been tested on animals.这一化妆品系列从未在动物身上试验过。
②The glue don’t stick very well. 这种胶水粘不住。
③We don’t want to hear your opinion; stick to the facts!我们不想听你的想法,只讲事实!④If you’re driving, stick to soft drinks. 如果你开车,那就坚持喝软饮料。
⑤Stick with me and you’ll be all right.有事你来找我就没问题了。
⑥The bus got stuck in the snow and we had to walk the rest of the way.公共汽车陷在雪中开不动了,剩下的路我们只好步行了。
10. bargain n. 便宜货;划算的买卖;交易,协议;vi.讨价还价,谈判,讲条件如果我能在大减价中找到便宜货,我也许会买台电视机。
②Y ou’ve got a good bargain there. 你做了一笔很上算的交易。
③I made a bargain with him. 我和他做了一项交易。
④Dealers bargain with growers over the price of coffee.商人与种植者就咖啡的价格进行商洽。
⑤The exam was more difficult than I had bargained for.这次考试之难出乎我的意料之外。
11.rather than Abstract art is about shapes, colors and textures rather than objects.rather than: 与其(某人/ 物),不愿,不要,不是Figure out the different uses of “rather than” in the following sentences.①I think I’ll have a cold drink rather than coffee. 我想喝冷饮,不想喝咖啡。
②Rather than squeezing your own oranges, have you tried buying packs of orangejuice? 你是否试过买几盒橙汁,而不是自己榨?③He ran rather than walked there. 他是跑过去,而不是走过去的。
④These shoes are comfortable rather than pretty.这些鞋子与其说漂亮倒不如说是舒服。
⑤Rather than allow the vegetables to go bad, he sold them at half price.不想让蔬菜就这样烂掉,他以半价把它们卖了。
12. devote…to… The sad thing is that although van Gogh devoted his whole self to painting, he only sold one painting before he died in 1890.devote…to… 为某人/ 物付出(时间、精力等),向某人/ 物奉献(时间、精力等),献身于某事物① I’m devoting all my time and energy to being a mom right now.目前我把所有时间和精力都放在当妈妈这件事上。