变频器手册-新
ABB变频器ACS550_01技术手册

ABB变频器ACS550_01技术手册ABB变频器ACS550_01技术手册范本1.引言1.1 文档目的这份技术手册旨在为用户提供ABB变频器ACS550_01的详细技术信息和操作指南,以帮助用户正确安装、配置和维护该变频器。
1.2 读者对象本技术手册适用于那些对ABB变频器ACS550_01感兴趣的电气工程师、自动化工程师和维护人员。
2.变频器概述2.1 产品简介ABB变频器ACS550_01是一款高性能的变频器,具有广泛的应用范围。
它采用先进的控制算法和可靠的电力电子设备,可用于驱动各种类型的电动机。
2.2 主要特性- 高效的能量转换,降低能源消耗- 广泛的电压和功率范围- 内置保护功能,保证设备和系统安全- 用户友好的操作界面,简化配置和故障诊断3.产品规格3.1 电气参数- 输入电压范围- 输出电压范围- 额定功率- 最大输出频率3.2 外观和安装尺寸- 外壳材料- 尺寸和重量- 安装方法和要求4.系统配置4.1 控制模式4.1.1 矢量控制模式4.1.2 V/F控制模式4.2 输入输出接口4.2.1 数字输入和输出4.2.2 模拟输入和输出5.变频器的安装和调试5.1 安全注意事项5.2 变频器的安装步骤5.3 电气连接方法和顺序5.4 信号线路的连接与配置5.5 初始参数的设定和调试过程6.变频器的维护与故障诊断6.1 维护注意事项6.2 日常维护程序6.3 故障诊断流程6.4 常见故障代码及解决方法7.附件- 附件1:ACS550_01用户手册- 附件2:ACS550_01安装指南8.法律名词及注释8.1 著作权:包括文字、图片和图表等的知识产权8.2 商标:注册商标,标识特定产品或服务来源的符号8.3 专利:用于保护发明创造的法律权益本文档涉及附件:- 附件1:ACS550_01用户手册- 附件2:ACS550_01安装指南本文所涉及的法律名词及注释:1.著作权:著作权是指作者对其创作的文字、音乐、艺术作品等作品所享有的权利。
EV500 系列变频器使用手册
EV500 系列变频器使用手册EV500 系列变频器使用手册
目录
第一章概述
1.1 产品介绍
1.2 主要特点
第二章安全注意事项
2.1 安全警告标志解释
2.2 安全使用指南
2.3 安装要求
第三章硬件安装
3.1 变频器外观及接口定义
3.2 进线电源接线
3.3 控制信号及通信接口
3.4 输出电机接线
第四章参数设置
4.1 变频器的参数表
4.2 参数设置步骤
4.3 常用参数设置说明第五章运行与调试
5.1 变频器运行
5.2 参数调试与优化
第六章故障排除与维护
6.1 常见故障与排除方法 6.2 维护与保养
第七章进阶功能
7.1 速度闭环控制
7.2 多机通信与同步控制 7.3 故障保护与报警处理第八章技术规格
8.1 性能参数
8.2 外观尺寸及安装尺寸 8.3 环境要求
8.4 电气特性
8.5 通信接口参数
8.6 附件清单
本文档涉及附件:
- EV500 系列变频器安装图纸
- EV500 系列变频器参数设置表格
本文所涉及的法律名词及注释:
1、变频器:也被称为交流变频调速器,是一种用于控制电机转速的技术设备。
通过改变输入电源的频率和电压,实现对电机转速的调节。
2、参数设置:指对变频器内部参数进行配置和调整,以适应不同工况要求和用户需求。
3、故障排除:指对变频器工作中出现的故障进行诊断和排除,保证设备正常运行。
4、多机通信:指多个变频器之间通过通信接口进行数据传输和控制,实现协同工作。
5、报警处理:指对变频器报警信号的判断和处理,保证设备运行安全可靠。
安科变频器 AT500系列变频器用户手册说明书

AT500系列变频器用户手册封面前言AT500系列变频器用户手册前言AT500系列变频器是高性能矢量型和转矩控制型变频器,产品采用了与目前国际领先技术同步的无速度传感器矢量控制技术和转矩控制技术,不仅具有与国际高端变频器同样优异的控制性能,同时还结合中国的应用特点,进一步强化了产品的可靠性和环境的适应性以及客户化和行业化的设计,能够更好地满足各种传动应用的需求。
注意事项●为说明产品的细节部分,本手册中的图例有时为拆下外罩或安全遮盖物的状态;使用本产品时,请务必按规定装好外壳或遮盖物,并按照手册的内容进行操作。
●本手册中的图例仅为了说明,可能会与您订购的产品有所不同。
●本公司致力于产品的不断改善,产品功能会不断升级,所提供的资料如有变更,恕不另行通知。
●如您使用中有问题,请与本公司各区域代理商联系,或直接与本公司客户服务中心联系。
客服电话:*************传真:*************24小时技术服务电话:133****0378133****0877AT500系列变频器用户手册安全注意事项安全注意事项安全标记说明:危险:错误使用,可能会导致火灾或人身严重伤害,甚至死亡!注意:错误使用,可能导致人身中等程度的伤害或者轻伤,以及发生设备损坏!█用途危险●本系列变频器用于控制异步电动机的变速运行,不能用于其他用途,否则可引起变频器故障或火灾!●本系列变频器不能简单的应用于医疗装置等直接与人身安全有关的场合!●本系列变频器是在严格的质量管理体系下生产的,如果变频器的故障可能会导致重大事故或损失,则需要设置冗余或旁路等安全措施,以防万一。
█到货检验注意●若发现变频器受损或缺少零部件则不可安装,否则可能发生事故!█安装注意●搬运、安装时,请托住产品底部,不能只拿住外壳,以防砸伤脚或损坏变频器!●变频器要安装于金属等阻燃物上,远离易燃物体,远离热源!●安装作业切勿将钻孔残余物落入变频器内部,否则可能引起变频器故障!●变频器安装于柜内,电控柜应配置风扇、通风口,柜内应构建有利于散热的风道。
《ME320LNnew电梯专用变频器用户手册》_V0.0

系列控制器符合以下指令和标准:目 录前言 (1)简介 (9)第1章安全信息及注意事项 (12)1.1 安全事项 (12)1.2 注意事项 (14)1.3 保护特性 (16)第2章产品信息 (18)2.1 命名规则及铭牌 (18)2.2 ME320LN new系列电梯专用变频器型号主要参数 (18)2.3 技术规范 (19)2.4 产品外型及安装孔位尺寸 (20)2.4.1 ME320LN new系列变频器产品外型图 (20)2.4.2 安装尺寸 (21)2.5 选配件 (23)2.6 变频器的日常保养与维护 (23)2.6.1 日常保养 (23)2.6.2 定期保养 (24)2.6.3 变频器的存储 (24)2.7 变频器的保修说明 (25)2.8 制动组件选型指导 (25)第3章机械与电气安装 (28)3.1 机械安装 (28)3.1.1 安装环境要求 (28)3.1.2 安装空间要求 (28)3.1.3 机械安装方法及步骤 (29)3.1.4面板拆卸和安装 (33)3.2 电气安装 (34)3.2.1 外围电气元件的选型指导 (34)3.2.2 外围电气元件的使用说明 (34)3.2.3 电气接线 (35)3.3 EMC问题的处理 (49)3.3.1 谐波的影响 (49)3.3.2 电磁干扰及处理 (50)3.3.3 漏电流及处理 (50)第4章变频器的操作与试运行 (52)4.1 电梯专用变频器的术语介绍 (52)4.1.1 操作方式 (52)4.1.2 控制方式 (52)4.1.3 运行模式 (52)4.1.4 工作状态 (52)4.2 操作与显示界面介绍 (53)4.3 功能码查看、操作方法说明 (54)4.3.1 三级菜单操作流程 (54)4.3.2 状态显示参数的操作方法 (55)4.3.3 故障信息读取 (56)4.3.4 数字输入、输出端子状态的监视 (57)4.4 密码设置 (57)第五章功能参数表 (60)5.1 功能参数表说明 (60)5.2 功能参数表 (60)5.2.1 功能参数表的分组 (60)5.2.2 功能参数表 (61)第六章参数说明 (76)F0组基本参数 (76)F1组电机参数 (78)F2组矢量控制参数 (81)F3组 VF功能参数 (82)F4组输入功能参数 (87)F5组输出功能参数 (89)F6组速度参数 (90)F7组辅助功能参数 (94)F8组辅助管理参数 (96)F9组保护功能参数 (99)FA组 PG参数 (101)FB组通讯参数(保留) (102)FC组专用增强功能参数 (102)FD组特殊功能参数 (105)FU组监控参数 (107)FF组厂家参数(保留) (110)FP组用户参数 (110)第七章应用及调试 (114)7.1 多段速控制方式 (114)7.1.1 多段速控制系统接线图 (114)7.1.2 参数设置 (115)7.2 模拟量控制方式 (119)7.2.1 模拟量控制时系统接线图 (119)7.2.2 参数设置 (119)7.3 检修运行 (120)7.3.1 系统接线图 (121)7.3.2 参数设置以及运行曲线图 (121)7.4停电应急运行 (123)7.4.1 停电应急运行方式 (123)7.4.2 UPS停电应急运行方式 (125)7.5 模拟量称重调试 (126)7.5.1 参数设定方法 (126)7.5.2平衡系数不准确的调试方法 (126)7.5.3 运行方向相反的调试方法 (127)7.6 无称重调试方法 (127)7.6.1 基本参数设定 (127)7.6.2 调试指导说明 (127)7.7 直接停靠功能调试方法 (127)7.7.1 直接停靠功能接线图 (128)7.7.2直接停靠功能基本参数设定 (128)7.7.3直接停靠停车时序 (129)7.7.4 直接停靠功能调试方法 (129)7.7.5 关于换速点的计算 (130)第八章故障诊断及对策 (132)8.1 故障信息及对策 (132)8.2 常见故障及其处理方法 (135)附录A EMC(电磁兼容性) (138)A.1 相关术语定义 (138)A.2 EMC标准介绍 (138)A.2.1 EMC 标准 (138)A.2.2 安装环境EMC 要求 (138)A.2.3 符合EMC 指令的条件 (138)A.3 EMC外围配件安装选型指导 (139)A.3.1 电源输入端加装EMC 输入滤波器 (139)A.3.2电源输入端加装交流输入电抗器 (139)A.4 屏蔽电缆 (140)A.4.1 屏蔽电缆要求 (140)A.4.2 屏蔽电缆安装注意事项 (141)A.4.3 电缆布线要求 (141)A.5 常见EMC干扰问题整改建议 (142)附录B 版本变更记录 (143)简介 ME320LN new电梯专用变频器用户手册安装抗干扰滤波器,使干扰降至最小。
Danfoss VLT AutomationDrive FC 300 变频器操作手册说明书
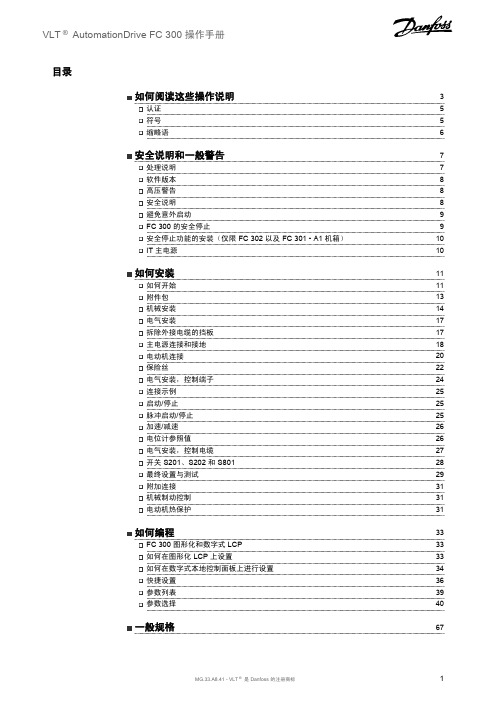
目录如何阅读这些操作说明3认证5符号5缩略语6安全说明和一般警告7处理说明7软件版本8高压警告8安全说明8避免意外启动9FC 300 的安全停止9安全停止功能的安装(仅限 FC 302 以及 FC 301 - A1 机箱)10IT 主电源10如何安装11如何开始11附件包13机械安装14电气安装17拆除外接电缆的挡板17主电源连接和接地18电动机连接20保险丝22电气安装,控制端子24连接示例25启动/停止25脉冲启动/停止25加速/减速26电位计参照值26电气安装,控制电缆27开关 S201、S202 和 S80128最终设置与测试29附加连接31机械制动控制31电动机热保护31如何编程33 FC 300 图形化和数字式 LCP33如何在图形化 LCP 上设置33如何在数字式本地控制面板上进行设置34快捷设置36参数列表39参数选择40一般规格67警告和报警73警告/报警信息73索引80如何阅读这些操作说明VLT® AutomationDrive FC 300 可为电动机提供非常高的主轴性能。
请仔细阅读本手册,以了解正确的使用方法。
如果不能正确地使用本变频器,则可能导致本变频器或相关设备无法正常工作、缩短它们的使用寿命或引起其它问题。
这些操作说明将帮助您初步了解、安装、设置 VLT® AutomationDrive FC 300,并对其进行疑难解答。
VLT® AutomationDrive FC 300 提供了 2 种主轴性能水平。
VLT® AutomationDrive FC 300 提供了 2 种主轴性能水平。
FC 301 提供了从分级速度 (U/f) 到 VVC+ 的性能,它仅用于异步电动机。
FC 302 是一款既可以用于异步电动机又可以用于永磁电动机的高性能变频器,它可以满足各种电动机控制原理的需要,如分级速度 (U/f)、VVC+ 和磁通矢量电动机控制。
西门子变频器V20 操作手册CH[14]
![西门子变频器V20 操作手册CH[14]](https://img.taocdn.com/s3/m/6a5dfabe82d049649b6648d7c1c708a1284a0ad6.png)
西门子变频器V20 操作手册CH西门子变频器V20操作手册1. 产品简介紧凑的尺寸,节省空间和成本简单的安装和调试,无需专业知识灵便的控制方式,支持多种通信协议高效的能耗优化,降低运行成本可靠的保护功能,提高设备寿命2. 安装要求2.1 安全提示变频器内部存在高压危(wei)险,请勿在通电状态下打开或者触摸变频器。
变频器输出电压可能高于输入电压,请勿在输出端接触裸露的导线或者端子。
变频器运行时会产生热量,请保持足够的散热空间和通风条件。
变频器可能会产生电磁干扰,请使用屏蔽电缆并接地。
变频器参数设置错误或者修改参数设置可能导致机器误操作,造成人员伤害或者设备损坏,请防止恶意访问参数设置,并采取适当措施应对可能的误操作。
2.2 安装位置和方式环境温度在-10℃到+50℃之间,相对湿度不超过95%无尘埃、油雾、腐蚀性气体、爆炸性气体等污染物无强烈的震动或者冲击海拔高度不超过1000米,否则需要降低额定功率安装距离不超过100米,否则需要增加输出滤波器或者输出电抗根据不同的功率段和电压等级,变频器有不同的尺寸和钻孔图,请参考[《V20产品样本》](^4^)中的相关数据。
1. 在控制柜内或者墙壁上钻孔,并使用螺钉固定变频器。
2.连接输入电源线、输出机电线、接地线和控制线到变频器的相应端子上。
3. 检查接线是否正确和坚固,无短路或者接地故障。
4. 关闭输入电源开关,并打开变频器的前盖。
5. 按下变频器上的电源开关,检查显示屏是否正常显示。
6. 关闭变频器的前盖,并打开输入电源开关。
3. 参数设置和调试使用变频器上的基本操作面板(BOP)使用外部按钮或者开关使用摹拟量或者数字量信号使用通信协议(如USS或者MODBUS RTU)根据不同的控制方式,可以选择不同的连接宏(connection macro),以简化参数设置。
连接宏是一组预设的参数值,用于实现常见的控制功能。
变频器提供了12种连接宏,分别为Cn000到Cn011,具体的功能描述和接线示意图,请参考[《V20入门指南》](^5^)中的相关内容。
最新-艾默生CTSK系列高性能可编程变频器用户手册 精品
艾默生CTSK系列高性能可编程变频器用户手册篇一:1000系列通用变频器艾默生1000系列通用变频器艾默生0000运行频率设置方式选择0001运行频率数字设置0002运行命令选择0003面板运行方式0004最大输出频率0005键功能选择0006功能选择0007曲线控制模式0008转矩提升000910加减数时间001112上下限频率0034起动频率0039停机方式0087额定频率0088额定电压0089额定电流0102参数写人保护0103参数初始化0104用户密码若密码忘记可用同时按三键可清除密码篇二:艾默生型号大全艾默生变频器代理商咨询电话:0755-2814419924072992291000、2000高性能通用型艾默生变频器为恒转矩负载,为风机水泵负载(100004-55200055-280)1000-20004单相220191000-20007单相2201951000-20015单相220191000-20192单相220221000-40007三相3800751000-40015三相380151000-40022三相380221000-40037三相380371000-40055三相380551000-40037三相380371000-40055三相380552000-40055007555752000-40075011075112000-40110015011152000-40150 1085151852000-40185102201985222000-4022019300122302000-40300103701303 72000-40370045037452000-4045010550145552000-40550552000-40750752000-4 0900902000-411001102000-413201922000-416001602000-420002019000-422019 202000-40750752000-40900902000-411001102000-413201922000-416001602000 -420002019000-422019202000-428002803000系列矢量艾默生变频器(22-220)3000艾默生变频器是高品质、多功能、低噪音的矢量控制通用变频器。
MV510系列高压变频器用户手册说明书
超节能高压变频器MV510系列使用维护说明书请将该使用维护说明书确实交至最终用户手中。
MV510编号:4KD72X001W01 VER 3.0MV510系列高压变频器用户手册目录第一章 系统介绍 (4)1.1 前言 (4)1.2 系统概述 (5)1.3 系统特点 (5)1.4 系统型号说明 (1)1.4.1 产品型号说明 (1)1.4.2 产品铭牌说明 (1)1.5 系统硬件说明 (2)1.5.1控制柜 (3)1.5.2单元柜 (3)1.5.3变压器柜 (3)1.5.4旁路柜 (4)1.6 规格 (4)第二章 注意事项 (5)2.1 概述 (5)2.2 安全注意事项 (5)2.3 使用注意事项 (6)第三章 现场安装规范 (7)3.1 外形和重量 (7)3.1.1 控制柜和单元柜 (7)3.1.2 变压器柜 (8)3.1.3 旁路柜(选配、自动旁路柜) (8)3.2 安装要求 (9)3.2.1 安装环境要求 (9)3.2.2 储存环境要求 (10)3.2.3 变频器布置要求 (10)3.2.4 设备地基要求 (12)3.2.5 设备接地要求 (13)3.3 安装过程 (14)3.3.1 验收 (14)3.3.2 估计重量 (14)3.3.3 搬运 (14)3.3.4 拼柜、固定 (14)3.3.5 功率单元安装 (16)3.3.6 变频器耐压测试 (16)3.3.7 电气接线 (17)3.4 安装完检查 (21)第四章 功能介绍 (22)4.1 概述 (22)4.2 与电机驱动相关的控制功能 (22)4.2.1控制方式 (22)台安科技(无锡)有限公司IMV510系列高压变频器用户手册台安科技(无锡)有限公司II 4.2.2频率给定方式 (23)4.2.3跳频设置 (23)4.2.4转矩提升 (23)4.2.5输出电压自适应 (24)4.2.6系统过电流限制 (24)4.2.7母线过电压限制 (24)4.2.8 瞬停自启 (25)4.2.9飞车启动 (25)4.2.10 高压采样 (25)4.2.11调制方式 (25)4.2.12 恢复出厂设置 (26)4.3 信号输入输出功能 (26)4.3.1 开关量输入 (26)4.3.2 开关量输出 (27)4.3.3 模拟量输入 (28)4.3.4 模拟量输出 (28)4.4 监控和显示功能 (29)4.5 通讯功能 (29)4.6 工频电网与变频器间的切换(选件) (29)第五章 工作原理 (30)5.1 简介 (30)5.2 主电路 (30)5.2.1 移相变压器 (31)5.2.2 功率单元 (32)5.3 控制系统 (35)5.3.1 主控系统 (36)5.3.2 电控系统 (36)第六章 现场调试规范 (38)6.1 范围 (38)6.2 术语 (38)6.3 调试规范 (39)6.3.1 测试内容 (39)6.3.2 控制柜送电检查 (39)6.3.3 模拟测试 (40)6.3.4 分体测试 (40)6.3.5 功率单元串联测试 (41)6.3.6 带电机空载测试 (42)6.3.7 带电机负载测试 (43)6.3.8 投运测试 (44)第七章 故障处理及系统维护 (46)7.1 故障分类 (46)7.2系统维护 (50)7.2.1 安全信息 (50)7.2.2 维护规程 (51)MV510系列高压变频器用户手册7.2.2.1 变频器投运前期 (51)7.2.2.2 变频器运行中 (51)台安科技(无锡)有限公司IIIMV510系列高压变频器用户手册台安科技(无锡)有限公司4第一章 系统介绍1.1 前言非常感谢贵公司选用我公司的MV510系列变频器产品,成为我公司的用户!我公司将竭诚为您服务,以不断努力创造更好的技术,为您提供更好的产品!台安科技(无锡)有限公司是由台湾知名跨国企业--东元集团旗下安台国际投资(新加坡)私人公司于2000年7月1日在中国大陆成立的外商独资企业。
EM100 系列变频器用户手册说明书

前言感谢您选用深圳市正弦电气股份有限公司研制的EM100系列变频器。
资料编号:31010107资料版本:101发布时间:2021-10EM100系列变频器是正弦电气研制推出的高性能、简易型交流电机驱动器。
稳定、可靠、易于使用是其重要特征。
本手册将为你提供EM100系列变频器的安装、配线、功能参数、日常维护、故障诊断等相关特性、及其操作方法与注意事项。
为了确保能够正确使用本系列变频器,充分发挥产品的卓越性能并确保使用者和设备的安全,在使用EM100系列变频器之前,请您务必详细阅读本手册。
不正确的使用可能会造成变频器运行异常、发生故障,甚至发生设备损坏、人身伤亡等事故!本使用手册为随机发送的附件,请妥善保管。
变频器首次与电机连接时,请您设定电机铭牌参数:额定频率、额定功率、额定电压、额定电流、额定转速、额定功率因数及电机接法。
由于我们始终致力于产品和产品资料的不断完善,因此,本公司提供的资料如有变动,恕不另行通知。
最新变动和更多内容,请访问 目录第一章安全注意事项 (3)1.1安全事项 (3)1.2注意事项 (6)第二章产品信息 (7)2.1产品确认 (7)2.2命名规则及铭牌 (7)2.3变频器型号 (8)2.4技术规范 (8)2.5产品部件说明 (10)2.6产品外形和安装尺寸 (11)第三章产品安装 (13)3.1机械安装 (13)3.2电气接线 (22)第四章操作与显示 (37)4.1操作与显示界面介绍 (37)4.2功能码查看及修改方法说明 (38)第五章功能参数表 (42)5.1功能代码表说明 (42)5.2功能参数表 (42)第六章参数说明 (54)第七章故障诊断及对策 (95)第八章电磁兼容性指导 (99)第九章保养和维护 (102)9.1变频器的日常保养与维护 (102)9.2变频器的保修说明 (103)附录A:EM100 MODBUS通讯协议 (104)附录B:选配件说明 (110)附录C:客户常见问题及处理措施 (111)第一章安全注意事项安全定义:在本手册中,安全注意事项分以下两类;危险:由于没有按要求操作造成的危险,可能导致重伤,甚至死亡的情况。
V10 系列变频器用户手册说明书

V10系列精致矢量型变频器用户手册深圳和为电气技术有限公司Shenzhen Honwin Technology Co.Ltd.安全注意事项安全声明◆在安装、操作、维护产品时,请仔细阅读并遵守本安全注意事项。
◆为保障人身和设备安全,在安装、操作和维护产品时,请遵循产品上标识及手册中说明的所有安全注意事项。
◆手册中的“注意”和“危险”事项,并不代表所应遵循的所有安全事项,只是作为所有安全注意事项的补充。
◆本产品应在符合设计规格要求的环境下使用,否则可能造成故障,因未遵循相关规定而引发的功能异常或部件损坏等不在产品质量保证范围内。
◆因违反操作产品引发的人身安全事故、财产损失等,我司将不承担任何法律责任。
安全等级定义“危险”表示如果不按规定操作,则导致死亡或严重人身伤害。
“注意”表示如果不按规定操作,则可能导致轻微身体伤害或设备损坏。
安全注意事项■安装前危险不要用手直接接触控制端子、单板元器件及变频器部件!部件缺少或损坏的变频器请不要再使用,否则有故障扩大和人员受伤的危险!注意产品铭牌的额定值是否与您的订货要求一致,如不一致,请不要安装!装箱单与实物不相符时,请不要安装!■安装危险必须由具有专业资格的人员进行安装作业,否则有触电的危险!变频器应安装于金属或其它阻燃物体上,否则有火灾危险!变频器安装应远离易燃物体和热源,否则有火灾危险!变频器不可安装在含有爆炸性气体的环境里,否则有引发爆炸的危险!不可随意拧动设备部件的固定螺栓,特别是带红色标记的螺栓,否则有设备损坏的危险!注意搬运时轻拿轻放,并托住产品底板,以防砸伤脚或摔坏变频器!请安装在能够承受变频器重量的地方,否则有掉落时损坏设备及伤人的危险!安装作业时避免将钻孔残余物、线头、螺钉掉入变频器内部,否则可能引起变频器故障! 变频器安装于柜内时,需做好散热处理,否则有可能引起产品故障或损坏!■配线危险必须由具有专业资格的人员进行配线作业,否则有触电或设备损坏的危险!配线过程中严格按照本手册执行,否则有触电或设备损坏的危险!确认输入电源处于完全断开的情况下,方能进行配线作业,否则有触电的危险!所有配线及线路应符合EMC及安规标准要求,导线线径请参考本手册的建议,否则可能发生事故!变频器整机漏电流可能大于3.5mA,为保证安全,变频器和电机必须接地,否则有触电的危险!严格按照变频器端子丝印配线,禁止将三相电源接到输出端子U、V、W,否则有设备损坏的危险!请正确安装制动电阻在B1、B2/+两端,禁止连接在其它端子,否则有设备损坏的危险! 主回路端子配线螺钉螺栓必须拧紧,否则有设备损坏的危险!禁止在控制端子RA、RB、RC以外的端子接交流220V电压等级信号,否则有设备损坏的危险!注意我司所有产品在出厂时已做过耐压测试,禁止再对变频器进行该项测试,否则有设备损坏的危险!变频器的端子信号线应尽量远离强电线布线,不能保证距离的情况下要垂直交叉分布,否则将造成控制信号受干扰!电机电缆长度大于100米时,建议选用输出电抗器,否则有设备故障的危险!■运行危险存贮时间超过2年以上的变频器,应用调压器逐渐升压上电,否则有设备损坏的危险! 按照1.3节要求完成配线后才能对变频器上电,否则有设备损坏或触电危险!变频器配线完成确认无误后,盖上盖板,才能通电,通电后严禁打开盖板,否则有触电的危险!变频器通电后,不管变频器处于何种状态都不要触摸变频器及周边电路,否则有触电的危险!变频器运行前,确认电机周围是否有人员能触及电机,否则有伤人危险!变频器运行中,应避免有异物掉入设备中,否则有设备损坏的危险!非专业技术人员禁止在运行中测试信号,否则有伤人或设备损坏的危险!禁止随意更改变频器参数,否则有设备损坏的危险!注意请确认电源相数、额定电压是否与产品的铭牌相符,否则可能造成设备损坏!检查与变频器相连的外围电路是否有短路现象,连线是否紧固,否则可能造成设备损坏! 运行前,请确认电机及机械是否在允许的使用范围内,否则可能会损坏设备!禁止直接触摸风扇、散热器、制动电阻,否则有机械损伤和烫伤的危险!不能频繁地通过通断电的方式来控制变频器的启停,否则有设备损坏的危险!变频器输出端开关或接触器的投入/切出前需确保变频器处于无输出状态,否则有设备损坏的危险!■保养危险必须由具有专业资格的工程师进行产品保养、检查或更换零部件!禁止带电对产品进行保养、检查或更换零部件,否则有触电的危险!断电后至少等待10分钟以上,保证电解电容残余电压降至36V以下才能进行保养、检查或更换零部件!更换变频器后必须严格按照上述流程再执行一遍!注意保养、检查或更换零部件时尽量不要触及元器件本体,否则有静电损伤器件的危险!所有可插拔器件须在断电情况下才能插拔!目录第一章V10系列产品概述 (1)1.1外形和安装尺寸 (1)1.2额定规格 (2)1.3外围器件、端子螺钉及配线配线规格 (2)1.4主回路端子说明 (2)1.5标准接线图 (3)1.5.1控制端子接线说明 (3)1.6制动电阻选型 (5)1.7操作键盘说明 (5)1.8操作键盘按键功能 (5)第二章参数列表 (8)第三章故障诊断及对策 (35)3.1故障列表及对策说明 (35)附录A (39)V10系列产品概述V10系列变频器用户手册第一章V10系列产品概述1.1外形和安装尺寸图1-1V10-4T0.75G/1.5LB~V10-4T3.7G/5.5LB功率等级安装尺寸示意图V10系列变频器用户手册V10系列产品概述1.2额定规格1.3外围器件、端子螺钉及配线规格1.4主回路端子说明1)V10-4T0.75G/1.5LB~V10-4T3.7G/5.5LB_R S T B1B2/+U V WV10系列产品概述V10系列变频器用户手册1.5标准接线图图1-2标准接线图1.5.1控制端子接线说明GND AO AI2AI1+10V 485+485-图1-3控制端子布置图V10系列变频器用户手册V10系列产品概述表1-4控制端子功能说明V10系列产品概述V10系列变频器用户手册1.6制动电阻选型1.7操作键盘说明图1-4操作键盘图1.8操作键盘按键功能V10系列变频器用户手册V10系列产品概述V10系列产品概述V10系列变频器用户手册V10系列变频器用户手册参数列表第二章参数列表参数符号说明:○:表示参数在运行时可以修改●:表示参数在运行时不可修改,停机时可以修改★:表示参数为只读状态,如监控参数参数列表V10系列变频器用户手册V10系列变频器用户手册参数列表参数列表V10系列变频器用户手册V10系列变频器用户手册参数列表参数列表V10系列变频器用户手册V10系列变频器用户手册参数列表参数列表V10系列变频器用户手册V10系列变频器用户手册参数列表参数列表V10系列变频器用户手册V10系列变频器用户手册参数列表参数列表V10系列变频器用户手册V10系列变频器用户手册参数列表参数列表V10系列变频器用户手册V10系列变频器用户手册参数列表参数列表V10系列变频器用户手册V10系列变频器用户手册参数列表故障诊断及对策V10系列变频器用户手册第三章故障诊断及对策3.1故障列表及对策说明V10系列变频器用户手册故障诊断及对策故障诊断及对策V10系列变频器用户手册V10系列变频器用户手册故障诊断及对策附录A V10系列变频器用户手册附录AModbus通讯1、支持协议支持Modbus协议,RTU格式和ASCII码格式;广播地址为0,从机地址设置值为1~247,248~255保留。
沃森VSI9000变频器用户手册
VSI9000系列变频器用户手册前言前言感谢您选用沃森电气科技(湖南)有限公司的VSI9000系列变频调速器(以下简称变频器)!该产品是本公司自主研发和生产的功能全面、性能优异的新一代变频器,融合了多种行业专业化需求和客户个性化需求,尽最大可能地满足您在各种控制场合的需要。
本产品符合GB/T12668-2002的国家标准的要求,通过了国家电控与配电设备质量监督检验中心的型式试验,并通过了ISO9001:2000国际质量体系认证。
本手册阐述了用户安装配线、参数设定、操作运行、故障诊断和故障排除、日常维护保养等相关事宜。
为确保能正确操作该系列变频器,发挥其优越性能,请在装机之前,详细阅读本手册,并请妥善保存,或将本手册交于该机器的使用者。
如对于本变频器的使用存在疑问或有特殊要求,请随时联络本公司的各地办事处或经销商,也可与本公司总部售后服务中心联系,我们将竭诚为您服务。
欢迎选用本公司系列变频器产品:✧VSI9000-G系列通用型变频器✧VSI9000-P系列风机、水泵专用型变频器✧VSI9000-ZS系列注塑机专用型变频器✧VSI9000-ZG系列注塑机一体化变频柜✧VSI9000-L系列拉丝机专用型变频器开箱时,请认真确认以下内容:1.产品是否有破损、碰伤现象,零部件是否有损坏、脱落现象;2.本机铭牌所标注的额定值是否与您的订货要求一致;3.如果装箱清单与您订货资料不符或产品有任何问题,请您随时联络本公司的各地办事处或经销商。
同时请说明产品型号、规格、产品编号、购买日期、破损程度等情况,以便我们第一时间内为您解决。
目录第一章注意事项...........................................11.1安全标识定义..........................................11.2安装注意事项.........................................11.3使用注意事项.........................................21.4报废注意事项.........................................4 第二章技术性能与指标.....................................52.1型号及其含义.........................................52.2铭牌说明.............................................52.3型号规格说明..........................................52.4技术指标说明..........................................7 第三章安装与配线...........................................93.1 安装环境要求.........................................93.2 外形与安装尺寸........................................93.3 操作面板尺寸........................................113.4 安装方向与空间......................................123.5 变频器的配线........................................133.6 主回路端子的配线....................................183.7 控制回路端子的配线..................................203.8 控制回路端子配线补充说明.............................223.9 通讯端子的配线.......................................233.10 选配件...............................................253.11 关于干扰.............................................27 第四章操作与运行..........................................294.1 操作面板.............................................294.2 面板操作方法.........................................334.3 变频器的上电.........................................36 第五章功能参数一览表.....................................375.1 基本运行参数.........................................375.2 频率设定参数.........................................385.3 起动制动参数.........................................385.4 辅助运行参数.........................................395.5 端子功能参数........................................435.6 保护功能参数........................................455.7 故障记录参数........................................455.8 闭环控制参数........................................465.9 简易PLC运行参数....................................475.10 摆频及测量参数......................................485.11厂家参数.............................................495.12状态监控参数.........................................49 第六章功能参数详细说明..................................506.1 基本运行参数.........................................506.2 频率设定参数.........................................566.3 起动制动参数.........................................576.4 辅助运行参数.........................................606.5 端子功能参数........................................666.6 保护功能参数........................................766.7 故障记录参数........................................786.8 闭环控制参数........................................796.9 简易PLC运行参数...................................846.10 摆频及测量参数......................................886.11 厂家参数............................................90 第七章故障诊断及处理.....................................917.1 故障现象及对策.......................................917.2 故障记录查询.........................................937.3 故障复位.............................................94第八章维护与保养..........................................958.1 日常检查与保养.......................................958.2 易损部件的检查与更换.................................978.3 存放及保修...........................................97 第九章应用范例............................................999.1 面板起停及面板调频...................................999.2 三线式控制模式1.....................................1009.3 三线式控制模式2.....................................1019.4 外部起停及外部电压调频..............................1029.5 外部控制方式、多段速运行.............................1029.6 可编程多段速控制....................................103第十章RS485通讯协议...................................10510.1 通讯概述...........................................10510.2 通讯协议说明.......................................10510.3 ASCII通讯协议......................................10610.4 RTU通讯协议.......................................118第一章注意事项为了确保您的人身、设备及财产安全,在使用变频器之前,请务必仔细阅读本章内容,并在以后的搬运、安装、运行、调试与检修过程中遵照执行。
变频器说明书

第六章 故障排除与维护...............................................................................90
6.1 判断为故障之前 ..................................................................................90 6.2 故障及排除...........................................................................................91 6.3 维护......................................................................................................93
SuperBona-iF/pF系列通用变频器
用户手册
SuperBona-iF/pF系列通用变频器 用户手册
本资料著作权属北京时运捷科技有限公司所有。未经著作权人书面 许可,任何单位或个人不得以任何方式摘录、复制或翻译。
侵权必究。
Copyright ○c 2004 SYRINGA Technology Co.,Ltd Beijing P.R.China All rights reserved.
第三章 安装和接线 ...................................................................................... 18
3.1 外观与结构 .......................................................................................... 18 3.2 面板的拆卸 .......................................................................................... 20 3.3 安装说明.............................................................................................. 20 3.4 基本接线原理图 .................................................................................. 23 3.5 端子分布图 .......................................................................................... 24 3.6 接线端子说明 ...................................................................................... 25 3.7 主回路配线 .......................................................................................... 28 3.8 控制回路配线 ...................................................................................... 29 3.9 智能键盘配线 ...................................................................................... 29 3.10 RS485 配线 ........................................................................................ 30
东元HDI系列变频器使用手册说明书

专业制造专心服务HDI通用变频器系列使用手册八、功能一览表八、功能一览表Pr000Pr001Pr002Pr003Pr004Pr005Pr006Pr007Pr008Pr009Pr010分类功能码功 能设定范围及功能说明出厂值参数功能一览表(一)Pr012Pr013Pr014Pr015Pr016Pr017Pr018Pr019Pr011主频率设定最大输出电压基准频率设定中间频率时电压中间频率设定最低频率时电压最低频率设定最高操作频率保留频率下限参数锁定0.00220/38050.00*2.50/3.0*0.5050.000.000********0.00~400.00 Hz0.1V —*0.01~400.00 Hz0.1V —*0.01~400.00 Hz0.1~*0.01~20.00 Hz 10.00~400.00 Hz 0.00~400.00 Hz 0:无效 1:有效第一加速时间第一减速时间第二加速时间第二减速时间第三加速时间第三减速时间第四加速时间第四减速时间参数重置0.1~6500.0S 0.1~6500.0S 0.1~6500.0S 0.1~6500.0S 0.1~6500.0S 0.1~6500.0S 0.1~6500.0S 0.1~6500.0S00Pr020∫Pr027保留启动方式选择停车方式选择运行指令来源运行频率来源载波频率点动频率0.00~400.00 Hz 0:由启动频率开始起动1:频率跟踪起动0:减速停止1:自由运转停止0:操作器 1:外部端子2:通讯口0:操作器 1:外部端子2:通讯口0~150000*5.00Pr031Pr032Pr033Pr034Pr035Pr036应用参数基本参数00~10 08:恢复出厂值自学习旋转频率马达时间常数Pr028Pr0290-10.000-100010.000八、功能一览表反转允许选择0:反转禁止 1:反转有效1Pr037参数功能一览表(二)分类功能码功 能设定范围及功能说明出厂值应用参数Pr038Pr039Pr040Pr041Pr042Pr043Pr044Pr045Pr046Pr047Pr048Pr049停止键有无效S 曲线设定Up /Down 频率步长启动频率停车频率自动转矩补偿跳跃频率一跳跃频率二跳跃频率三跳跃频率范围定时器一时间设定定时器二时间设定0:STOP 无效 1:STOP 有效0.0~6500S 01~10.0 Hz 0.1~10.0 Hz 0.0~10.0%0.00~400.00 Hz 0.00~400.00 Hz 0.00~400.00 Hz 0.10~10.00 Hz 0.1~10.01~10010.00.010.500.502.0%0.000.000.000.500.11Pr050Pr051Pr052Pr053Pr054Pr055Pr056Pr057Pr058Pr059Pr060Pr0610无效 1运行中 2故障指示 3零速 4制动指示 5设定频率到达 6任意频率一到达7任意频率二到达 8加速中 9减速中 10变频器过载报警 11电机过载报警 12过转矩报警 13低压报警 14阶段完成指示15过程完成指示 16计数器到达 17中间计数器到达 18外控定时器一到达 19外控定时器二到达204~20mA 断线 25辅泵一 26辅泵二 27牵伸到达 28 PID 下限报警 29 PID 上限报 30风扇动作 31电磁继电器动作 32制动电阻动作0无效 1运转 2正转 3反转 4停止 5正/反转 6寸动 7寸动正转 8寸动反转 9紧停 10复位 11保留 12散热器或电机过热 13定时器一 14定时器二 15保留 16保留 17高速 18中速 19低速 20多段速一 21多段速二 22多段速三 23加减速选择一 24加减速选择二 25up 功能 26down 功能27计数器脉冲 28计数器复位 29牵伸31 AUTOPLC 暂停复位 32 PID 开启数位频率信号输出端0.00~400.00 Hz0203101718190105020000.00频率一致一多功能输入一(X1端子)多功能输入二(X2端子)多功能输入三(X3端子)多功能输入四(X4端子)多功能输入五(X5端子)多功能输入六(X6端子)多功能输出一(Y1端子)多功能输出二(Y2端子)多功能输出三(TA 、TB 、TC 端子)多功能输出四(KA 、KB 端子)多功能输出五(VO 端子)输入输出端子0.01~2.50八、功能一览表参数功能一览表(三)分类功能码功 能设定范围及功能说明出厂值Pr062Pr063Pr064Pr065Pr066Pr067Pr068Pr069频率一致二频率一致范围设定计数值设定模拟量输入选择0:0~10V 1:0~5V 2:0~20mA 3:4~20mA 4:0~10V,4~20mA 叠加0.00~400.00 Hz 0.10~10.00 Hz 00~6550000.000.5000模拟量低端频率低端频率偏压方向模拟量高端频率高端频率偏压方向0.00~400.00 Hz 0:正方向 1:负方向0.00~400.00 Hz 0:正方向 1:负方向0050.000Pr070Pr071Pr072Pr073Pr074Pr075模拟量负偏压反转选择VO 类比输出增益UP.DOWN 功能选择UP.DOWN 速度选择模拟量滤波常数中间计数器设置0:不可 1:可反转0.0~100.0%0:不记忆力1:记忆0:0.1Hz 1:0.01Hz0~500~65500010*******:普通运行 1:外控四段速2:外控多段速 3:扰动 4:控多段速 5:牵伸PLC 运转选择Pr080Pr081Pr082Pr083Pr084Pr085Pr086第二频率设定第三频率设定第四频率设定第五频率设定第六频率设定第七频率设定第八频率设定0.00~400.00 Hz 0.00~400.00 Hz 0.00~400.00 Hz 0.00~400.00 Hz 0.00~400.00 Hz 0.00~400.00 Hz 0.00~400.00 Hz15.0020.0025.00300035.0040.000.50Pr078Pr079PLC 运转方向PLC 加减速时间0~255 (0:正转 1:反转)0~65535000:运转一周后停止 1:循环运行 2:自动运行(STOP 间隔)一周后停止 3:自动运行(STOP 间隔)循环运行0Pr076Pr0770AuToPLC 选择多段速及简易PLC输入、输出端子八、功能一览表参数功能一览表(四)分类功能码功 能设定范围及功能说明出厂值Pr087Pr088Pr089Pr090Pr091Pr092Pr093Pr094Pr095Pr107Pr108Pr109Pr096~Pr106定时器一定时器二定时器三定时器四定时器五定时器六定时器七定时器八0.0~6500.0S 0.0~6500.0S 0.0~6500.0S 0.0~6500.0S 0.0~6500.0S 0.0~6500.0S 0.0~6500.0S 0.0~6500.0S 10.010.00.00.00.00.00.00.0保留多段速及简易PLCAUTOPLC 记忆功能外部端子UP 加速时间外部端子DOWN 减速时间外部端子频率递增/递减模式选择0:不记忆 1:不记忆0-6500.00Pr110Pr111Pr112Pr113Pr114Pr115Pr116Pr117Pr118Pr119Pr124Pr125Pr126Pr127Pr128Pr129恒速中失速防止时减速时间故障重启时间频率跟踪时电压上升时间过转矩检测准位过转矩检测时间0~200%0.1~20.0S 01.05.01.00.5辅泵个数辅泵连续时间辅泵互锁时间高速运行时间低速运行时间停机压力准位停机准位连续时间唤醒准位睡眠频率睡眠频率连续时间过压失速防止选择加速中失速防止准位恒速中失速防止准位减速中失速防止准位Pr120Pr121Pr122Pr1230:无效 1:有效0~200%0~200%0~200%过转矩检出方式选择0~30015001500~21~9000min 0.1~250S 1~250S 1~250S 1~150%1~250S 1~150%0.00~400.01~250S 0605S 60S 60S 95%30S 80%20.0020S 保护功能参数保护功能参数0.1~25.50.02~250.01~10--00-6500.000-1都会先停止再启动,一直持续到自动运转指令OFF 后停止; 2)每一阶段完成时,对应多功能输出接点动作;3)每一程式运行完成时,对应多功能输出接点动作。
易合力 SV600 SV500 通用变频器用户手册说明书

前言感谢您购买和使用SV500/SV600系列通用变频器用户手册。
SV500/SV600系列变频器是一款通用型矢量变频器,主要用于控制和调节三相交流异步电机的速度。
本系列变频器采用空间SVPWM矢量控制技术,实现低速高转矩输出,具有良好的动态特性和过载能力,能满足用户的多种需求。
本系列变频器适用于大多数电机驱动领域,包括:纺织、造纸、包装、食品、风机、水泵及各种自动化生产设备;作为调速装置负载适应性强、运行稳定、可靠性好。
本手册为用户提供安装配线、参数设定、运行调试、日常维护等相关注意事项,为了确保能正确安装和操作变频器,使用前请务必认真阅读本说明书,设备配套厂家请将此说明书随设备发送给终端用户,方便后续的使用参考。
如在使用过程中,存在困难或有其他特殊的要求,请及时联系经销商,也可直接联系本公司的各地办事处,我们将竭诚为您服务。
本公司致力于产品的不断改善,产品功能会不断升级,所提供的资料如有变更,恕不另行通知。
同时这两种Logo“”“”都为本公司的注册商标。
简介SV600系列特点:1、标准产品为单相220V(0.75kW~2.2kW),三相380V(0.75kW~1200kW)。
2、三相380V电压等级产品支持G型机(重载)和P型机(轻载)设置。
G型机过载能力为150%额定电流60秒,180%额定电流3秒;P型机过载能力为120%额定电流60秒,150%额定电流3秒。
3、标准产品110kW及以上标配内置H级绝缘等级的直流电抗器。
4、独立风道设计,选用长寿命大风量的真空浸漆直流冷却风机。
电路板采用三防漆加厚的喷涂工艺。
5、三相交流异步电机控制方式支持VF控制,开环矢量控制,闭环矢量控制,转矩控制。
6、标配RS485通讯口,丰富的输入输出IO端子,具有自动稳压,转速追踪再起动,瞬间掉电不停机等功能,优异的过压过流限制满足各种场合不轻易故障报警。
过载、短路保护,输入输出缺相保护,过压、欠压,继电器吸合异常等各种保护功能。
ACS310变频器用户手册
ACS310变频器用户手册ACS310变频器用户手册1. 引言1.1 文档目的本用户手册旨在向使用ACS310变频器的用户提供详细的操作说明和相关信息,以帮助用户正确安装、使用和维护该设备。
1.2 读者对象本用户手册适用于所有使用ACS310变频器的操作人员和维护人员,无论其技术水平如何。
1.3 安全注意事项在使用ACS310变频器之前,必须仔细阅读和理解本手册中的所有安全注意事项。
违反这些注意事项可能导致电击、火灾或其他危险。
2. 产品概述2.1 产品特点ACS310变频器是一种先进的电气控制设备,具有以下主要特点:- 高性能的电机控制和变频调速功能- 灵活的应用适应性- 简单和直观的用户界面- 可提供多种通信接口和扩展模块2.2 主要组成部分ACS310变频器由以下主要组成部分组成:- 电源单元- 控制单元- 接口板- 散热器- 过滤器- 整流器3. 安装3.1 硬件安装3.1.1 硬件准备在开始安装ACS310变频器之前,请确保以下条件已满足:- 准备好适当的安装工具和设备- 确保电源和接地符合安全要求- 检查变频器和相关设备的外观是否完好无损- 确保安装位置符合要求,远离潮湿、灰尘和高温环境3.1.2 硬件连接根据安装手册中的指导,将ACS310变频器正确连接到电源、电机和其他相关设备。
3.2 软件安装3.2.1 软件准备在进行软件安装之前,请确保已准备好以下内容:- 符合ACS310变频器要求的操作系统和驱动程序- 最新版ACS310变频器软件的安装文件3.2.2 软件安装步骤根据用户手册中的详细指导,进行ACS310变频器软件的安装。
确保按照要求选择适当的配置和设置。
4. 使用4.1 启动和关闭按照用户手册中的指令,正确启动和关闭ACS310变频器。
确保按照指导操作,避免意外损坏设备或造成不必要的安全风险。
4.2 参数设置根据设备需求和操作要求,进行ACS310变频器的参数设置。
用户手册中提供了详细的参数说明和设置方法。
glx90-011G变频器使用手册

glx90-011G变频器使用手册
1:改变方向。
按此键可改变电动机的旋转方向。
2:启动变频器。
3:停止变频器运行。
4:电动机点动。
在变频器无输出的情况下,按下此键,将使电动机启动,并按预先设置的点动频率运行。
释放此键时变频器停止运行。
5:访问参数。
按此键可访问变频器的参数。
6:减小数值。
按此键可减小面板上显示的数值。
7:增大数值。
按此键可增大面板上显示的数值。
8:此键用于浏览辅助信息。
按下此键并保持不动,将从运行时的任何一个参数开始浏览,显示的数据有直流回路电压(用d表示)、输出电流(A)、输出频率(Hz)、输出电压(0)、P0005选定的数值。
9:状态显示。
显示变频器当前使用的设置值。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
电机自学习状态
编码器1方向和系统方向 编码器1绝对零位 软件开断使能 强制输出转速设定 0.1.16.17 2206 0~1 0~1000
调试步骤(CP模式)
1. 2. 3. 4. 5. 6. 7. 断开外部使能(即端子16-20断开) 设定电机参数:CP18-CP25;电机参数参考下页 适配电机参数,设定CP26:2 找电机零位,参考下页(如零位已知跳过此步) 设定CP35:1(即用软件断开使能,此时外部使能是合上的,即16-20闭 合) 设定最大速度=所需最大流量/油泵排量(步骤:设CP9的值为1时, CP10=最大速度;设CP9的值为2时,CP10=最大速度) 调整给定压力、流量的电压值:CP7对应给定压力,0kgf对应为0, 140kgf给定时应显示为-56(注:此值是相对与量程为0-25Mpa的传感器 而言);CP8对应给定流量,0对应为0,99流量显示为100;测试注射 信号,按注射时CP5显示为:17:ST+I1 设定CP35:0,CP3变频器状态应为Fcon 再次观察CP7和CP8的数值变化,如果波动大于0.3则模拟量干扰太大, 需改进EMC(接地和屏蔽等) 上位控制器压力流量斜率设置:设为0.03,在调试时如果某个动作震动 过大,适当增大斜率 在注射前后必须留有0.03的时间流量为零
8. 9. 10. 11.
调试步骤(CP模式)
12.
13.
14. 15. 16. 17.
18. 19.
设定20kgf压力,20流量,观察压力表压力;如果有压力则表示电机转向 正确,系统基本正常,转步骤14;如没有压力,转步骤13 如果压力表没有压力,首先观察CP1(编码器速度)是否正常,再确认 给油阀是否打开,然后是安全阀是否关闭;如果以上都正常,则更改系 统方向(首先设CP35为1,然后CP33加或减16,最后设CP35为0),再 转步骤12 设定140kgf压力,30流量,系统强制输出,观察压力表压力,如果有震 荡适当调低参数集2(当CP9设为2时)的压力PID参数CP27.28.29或速度 PID参数CP13.14.15(参数集说明见15) 参数集说明:本程序共用到4个参数集,分别是静止状态伺服驱动器处 于参数集0,注射时为参数集1,保压时为参数集3,其它动作为参数集2 (包含开合模、预塑、顶出、座台进退、调模、试压、抽芯) 测试开合模,如果有震动调整(大)上位压力流量斜率;如果有爬行现 象调整(小)参数集2(当CP9设为2时)的压力PID参数CP27.28.29或速 度PID参数CP13.14.15 测试注射,在注射过程中实际参数集(CP6)应显示为1,转到保压后 CP6应显示为3;如果保压有震荡调整(小)参数集3(当CP9设为3时) 的压力PID参数CP27.28.29或速度PID参数CP13.14.15;如果在注射转保 压时压力超调过大,调整(大)参数集1(CP9设为1)的压力PID参数 CP27.28.29或速度PID参数CP13.14.15 测试保压,观察实际压力波动(CP7),波幅在0.8以内正常 全自动测试,观察实际参数集(CP6)是否与各种动作一致
1 : 模拟量1正 2 : 模拟量1负 3 : 模拟量2正 4 : 模拟量2负
16 : 使能 20 : 24V参考电源输出 21 : 外部24V电源输入 22 : 数字电源地
控制端子实际接线
电控箱设计和接线注意
• 伺服控制器部件与PLC等其它元器件分开安装 • 强电与弱电分开走线,有交叉需垂直走线; • 控制器安装背板请使用镀锌板,滤波器,电抗器,制动 电阻都安装在这张板上;在这张板上设计一个接地铜牌 ,各部件地线连接到铜牌上; • 三相电机线最好采用屏蔽线,没有屏蔽线必须采用金属 套管,屏蔽层变频器端单端接地; • 压力、流量和压力传感器信号必须采用屏蔽线,屏蔽层 变频器端单端接地。Biblioteka 8. 9. 10. 11.
调试步骤(应用模式)
12.
13. 14. 15. 16. 17.
18. 19.
CP6
CP7 CP8 CP9 CP10 CP11 CP12 CP13 CP14 CP15 CP16 CP17
ru26
ru27 ru29 Fr09 oP10 oP28 oP30 cS06 cS09 cS10 ds04 uF11
active parameter set
AN1 pre amplifier disp. AN2 pre amplifier disp. indirect set pointer max. reference forward acc. time for. dec. time for. KP speed KI speed KI offset flux/rotor adaption mode switching frequency
8. 接触器和其他感应线圈必须应用干扰吸收器(火花抑制器) 9.当计划应用控制柜时,应考虑 EMC 测量
强电接线端子
L1,L2,L3: 三相进线 ++,PB : 制动电阻 ++,-: 直流母线 T1,T2 : 电机温度PTC检测 U,V,W : 到电机出线 PE : 接地和屏蔽
强电接线
弱电接线端子
用于减小高频干扰脉冲。如:当开关在输出状态时。 适于“干扰 点的抑制测量”
无线电干扰滤波器
对滤波器滤波效果的影响因素:
• 电机电缆长度
• 干扰器的数量 (变频器、开关电源、整流器)
• 变频器的开关频率
• 电缆放置方式 • 滤波器接地、变频器接地、屏蔽接地
控制柜结构: 变频器运行的接线规则
1. 为限制干扰应用一个无线电干扰滤波器(单个或成组干扰抑制) 2.连接电机屏蔽电缆到 装置两侧一个大的接触面积 上(变频器和电机);连接控制屏蔽电缆到 变频器的 一侧 3. 在屏蔽层中断的情况下,在中断点的前和后连接 4. 控制柜内的金属控制部件用电镀的垫片和低阻抗、大面积的内部连线 5. 控制柜和机器底座之间用低阻抗、大面积的连接(电机外壳应该连接低阻抗、大面积的底座) 6.坚决不能报警线和干扰抑制线平行布置 (最好距离 > 20 cm) 7. 避免电缆弯成环行. 无用的电缆应两端接到同一电位上
KEB 科比
伺服泵系统调试手册
伺服节能注射机
KEB伺服控制器
伺服节能注射机-液压控制系统单元的革命性突破 -伺服精密、快速响应、节能环保
节能测试举例
参数\机型 压力上升时间(ms) 压力下降时间(s) 压力稳定性(mv) 结论 合模时间(s) 开模时间(s) 顶出时间(s) 注射时间(s) 保压时间(s) 储料时间(s) 周期(s) 结论 注射重复精度(‰) 结论 节能测试(KW/h) (3小时耗电) 结论 17° 11.4° 比普通机节能33% 8.9° 比普通机节能48% 7.6‰ 1.8 1.5 1.2 4.2 0 1.8 12.9 2.1 1.7 1.3 4.2 0 2 14.6 比普通机慢13% 21‰ 1.6 1.3 1.2 4.2 0 1.7 12.3 比普通机快5% 2.5‰ 88普通机 247 1.31 64 88变量泵 462 2.4 80 88伺服 140 0.23 40
CP26
CP27 CP28 CP29 CP30 CP31
Fr10
cn04 cn05 cn06 Pn12 dr48
load mot.depentant para
PID kp PID ki PID kd warning dOH stop.mode Motor identification
装载电机参数
PID kp PID ki PID kd 电机过热保护模式 电机参数自学习
变频器的基本知识
U1
UZK
U2
I1
IZK
I2
UMains = 230 / 400 V fMains = 50 Hz
UMotor = 可变
fMotor =可变
主电路
EMC – 部件
HF-无线电干扰滤波器 进线电抗器 NHF-输入滤波器 电机输出电抗器 du/dt-输出滤波器 正弦波滤波器 扩展型正弦波滤波器 高频干扰抑制器
激活参数集
压力 流量 参数集指针 最大速度 加速时间 减速时间 速度KP值 速度KI值 KI偏置 弱磁控制 开关频率 0~-56.5%(针对0~25Mpa 的传感器而言) 0~100% 0~3 0~2800 0.01~0.10 0.01~0.10 500~3000 200~1000 100~500 8 2~8
调试步骤(应用模式)
1. 2. 3. 4. 5. 6. 7. 断开外部使能(即端子16-20断开) 设定电机参数:dr23-dr31;电机参数参考下页 适配电机参数,设定fr10:2 找电机零位,参考下页(如零位已知跳过此步) 设定di:1(即用软件断开使能,此时外部使能是合上的,即16-20闭合) 设定最大速度=所需最大流量/油泵排量(步骤:设Fr9的值为1时, op10=最大速度;设Fr9的值为2时,op10=最大速度) 调整给定压力、流量的电压值:ru27对应给定压力,0kgf对应为0, 140kgf给定时应显示为-56(注:此值是相对与量程为0-25Mpa的传感器 而言);ru29对应给定流量,0对应为0,99流量显示为100;测试注射 信号,按注射时ru21显示为:17:ST+I1 设定di1:0,ru00变频器状态应为Fcon 再次观察ru27和ru29的数值变化,如果波动大于0.3则模拟量干扰太大, 需改进EMC(接地和屏蔽等) 上位控制器压力流量斜率设置:设为0.03,在调试时如果某个动作震动 过大,适当增大斜率 在注射前后必须留有0.03的时间流量为零
辅助说明(CP模式)
1.
2. 3. 4.
CP36为强制输出,用于观察电机输出是否正常;在系统压力安全阀关 闭时最大速度设定不能超过100rpm,安全阀开启的情况下设定速度不要 大于1000rpm CP1为电机实际转速,CP2为伺服控制器输出转速,正常情况下两个速 度应保持一致 CP3为驱动器状态,加、减速、恒速、报警等都会在此显示 CP4为电机实际电流值,在95kgf左右时达到电机额定电流