霍尔器件制作自行车测速仪
霍尔传感器自行车车速超速报警装置
霍尔传感器自行车车速超速报警装置霍尔传感器是一种能够感应磁场变化并输出电信号的传感器。
它是由磁敏元件和辅助电路组成的,可以广泛应用于测速、计数、位置检测等方面。
在自行车车速超速报警装置中,我们可以利用霍尔传感器来感应自行车车轮转动的速度,并通过微控制器进行计算,当车速超过设定的阈值时触发报警装置,提醒骑行者减速。
在制作自行车车速超速报警装置之前,我们需要准备以下材料和工具:1. 霍尔传感器2. 磁铁3. 微控制器4. 蜂鸣器或LED灯5. 电池或电源6. 电路连接线7. 电子焊接工具8. 外壳(可选)接下来,我们需要进行一系列的步骤来制作自行车车速超速报警装置:1. 安装霍尔传感器:我们需要将霍尔传感器固定在自行车前轮或后轮的固定支架上,以便感应车轮的运动。
我们需要在车轮的辐条上安装一个小磁铁,使霍尔传感器可以感应到磁场的变化。
在安装过程中,要确保传感器与磁铁之间的距离和位置是合适的,以保证传感器可以正常工作。
2. 连接电路:接下来,我们需要将霍尔传感器、微控制器、蜂鸣器或LED灯以及电源进行连接。
通常情况下,霍尔传感器会输出一个脉冲信号,微控制器可以通过计数脉冲的方式来计算车速。
当车速超过设定的阈值时,微控制器会触发蜂鸣器或LED灯进行报警。
3. 调试和测试:在完成电路连接之后,我们需要对整个装置进行调试和测试。
可以用手动旋转车轮来模拟骑行的过程,观察蜂鸣器或LED灯是否能够正常工作。
在测试过程中,可以根据实际需要调整车速超速报警的阈值,以适应不同的骑行环境和要求。
4. 完善外壳和固定装置:如果需要的话,我们可以为自行车车速超速报警装置制作一个外壳,并固定在自行车的车架上。
外壳可以起到保护装置的作用,同时也可以美观大方。
在固定装置的选择上,可以根据自行车的车架结构和自行车车速超速报警装置的尺寸来进行调整,以确保装置稳固可靠。
通过以上步骤,我们就可以制作一款简单、实用的自行车车速超速报警装置。
当骑行者超速行驶时,装置会发出警报,提醒骑行者减速。
霍尔传感器自行车车速超速报警装置

霍尔传感器自行车车速超速报警装置
这种自行车车速超速报警装置主要是通过霍尔传感器来检测自行车的速度,当车速超
过预设速度时,装置将发出声音或光线信号来提醒骑行者减速。
下面将详细介绍该装置的
工作原理和特点。
装置主要由霍尔传感器、硬件电路和报警器组成。
霍尔传感器是一种基于霍尔效应的
传感器,它通过测量周围的磁场强度来判定自行车的速度。
当自行车运动时,传感器会感
应到地面上的磁场变化,并将信号传输给硬件电路。
硬件电路根据传感器的信号进行处理,并判断自行车的速度是否超过预设速度。
当速度超过预设速度时,报警器将发出声音或光
线信号来提醒骑行者。
该装置具有以下几个特点。
装置采用了霍尔传感器,具有高敏感性和快速响应的特点,可以实时监测自行车的速度,确保报警的准确性。
该装置的报警器采用了声音和光线信号
相结合的方式,提供多种警示方式,便于不同环境下的感知和理解。
该装置可以设置预设
速度,骑行者可以根据自己的需要进行调整,确保安全性和灵活性的平衡。
该装置体积小巧,安装方便,不会对自行车的外观和使用造成影响。
随着交通环境的变化,自行车车速超速报警装置成为了一种必要的安全装置。
该装置
利用霍尔传感器来监测自行车的速度,并通过声音或光线信号来提醒骑行者减速。
它具有
高敏感性、快速响应、多种警示方式和方便安装等特点,可以有效提高自行车骑行的安全性。
希望这种装置能够得到广泛推广和应用,为城市交通的安全和便利做出贡献。
霍尔传感器自行车车速超速报警装置

霍尔传感器自行车车速超速报警装置霍尔传感器自行车车速超速报警装置是一种基于霍尔传感器技术的智能装置,能够实时监测自行车的车速,一旦车速超过预设值,即可发出警报提醒骑手注意减速,从而降低事故的发生概率。
下面将从该装置的原理、功能和优势等方面展开介绍。
一、原理霍尔传感器是一种利用霍尔元件的磁场敏感特性进行测量的传感器。
在自行车车轮上安装霍尔传感器,当车轮转动时,由于车轮上存在磁性的元件,会产生相应的磁场变化,霍尔传感器就能检测到这一变化并转化为电信号,从而实现对车速的监测。
通过这一原理,超速报警装置能够及时准确地检测到自行车的车速情况,并进行相应的警示。
二、功能1. 实时监测车速:装置能够实时监测自行车的车速,将数据传输到控制装置,保证数据的准确性和及时性。
2. 警示功能:一旦车速超过预设值,报警装置就会发出声音、光线或者震动等提醒骑手注意减速,提高骑行的安全性。
3. 数据记录和分析:装置可以将骑行数据记录下来,并进行分析,以便骑手了解自己的骑行习惯和改进不足之处。
4. 能耗低:采用低功耗的电子元件,保证了长时间的稳定运行,减少更换电池的频率。
霍尔传感器自行车车速超速报警装置是一种应用前沿的智能装置,通过采用霍尔传感器技术实时监测车速,并具有警示功能和数据记录分析等特点,能够有效提高骑行的安全性和便利性。
它的出现让自行车骑行更加安全、便捷和智能,具有很高的市场前景和广泛的应用价值。
在未来的发展中,我们可以进一步改进装置的性能和功能,例如增加蓝牙连接功能,将骑行数据上传到手机APP,让骑手能够更方便地查看自己的骑行数据和设置警报值;也可以结合GPS定位技术,实现自行车的位置追踪和防盗功能;还可以考虑智能联网功能,让自行车与其他设备进行交互,提供更多的便利性和安全性。
通过不断的技术创新和产品改进,相信霍尔传感器自行车车速超速报警装置能够更好地满足人们对骑行安全和便捷的需求,为自行车骑行带来更多的乐趣和舒适。
霍尔器件制作自行车测速仪

《电路与电子线路根底〔2〕》课程项目总结报告题目(A):用霍尔器件制作一个自行车组号: A 11任课教师:组长:成员:成员:成员:成员:联系方式:二零一五年一月十日【元件简介】1.霍尔元件霍尔器件是常用的磁传感器,当磁铁靠近霍尔器件时就会产生信号,利用这个信号可以测量位置距离角度等。
霍尔效应,是指磁场作用于载流金属导体、半导体中的载流子时,产生横向电位差的物理现象。
单极性霍尔开关的感应方式:磁场的一个磁极靠近它,输出低电位电压〔低电平〕或关的信号,磁场磁极离开它输出高电位电压〔高电平〕或开的信号,但要注意的是,单极性霍尔开关它会指定某磁极感应才有效,一般是正面感应磁场S极,反面感应N极。
当自行车匀速转动时便会产生如下负脉冲信号,此时负脉冲信号的频率就是自行车车轮转动的频率。
2.LM331LM331是美国NS公司生产的性能价格比拟高的集成芯片,可用作精细频率电压转换器、A/ D 转换器、线性频率调制解调、长时间积分器与其他相关器件。
Lm331内部原理图LM331引脚图【实验方案】我们小组准备将磁体安装在旋转面上,同时将霍尔器件固定在磁体经过的弧线上,这样当磁铁靠近霍尔器件时就会产生一个负脉冲信号。
将脉冲信号通过由LM331、电阻、电容组成的频率/电压转换电路将其线性地转化为电压,即可利用电压表来指示自行车的速度。
下为由LM331、电阻、电容组成的频率/电压转换电路的原理简介。
LM331用作FVC 时的原理框-输入比较器定时比较器++5671sQTC tR tV CC 2/3V CC9/10V CCs置“1”端置“0”端RR LC L-V 0fi 图5-1-1+V Q+10V此时,○1脚是输出端(恒流源输出),○6脚为输入端(输入脉冲链),○7脚接比拟电平。
工作过程(结合看图5-1-2所示的波形)如下:2/3V CCv ctV 0v CLp-pVCC01st图5-1-2当输入负脉冲到达时,由于○6脚电平低于○7脚电平,所以S=1(高电平),Q =0〔低电平〕。
利用电动自行车后轮无刷直流电机霍尔信号的一种测速方法

利用电动自行车后轮无刷直流电机霍尔信号的测速方法包括以下步骤:
1. 硬件连接:首先,将电动自行车的后轮电机与无刷直流电机相连,以便从电机中获取霍尔信号。
2. 霍尔信号采集:在电机的霍尔位置上安装霍尔传感器,以便实时监测电机的转速。
霍尔传感器将转速信号转化为电信号,然后通过线路传输到控制器或仪表盘。
3. 信号处理:在控制器或仪表盘处,使用信号处理电路对霍尔信号进行放大、滤波和整形处理,以确保信号的稳定性和准确性。
4. 速度计算:处理后的霍尔信号被送入微处理器或单片机中进行处理。
微处理器或单片机通过计算单位时间内采集到的霍尔信号数量,再结合电机的极对数,即可计算出电机的转速。
5. 显示与存储:将计算出的速度信息实时显示在仪表盘上,或者通过无线传输模块将速度信息发送到其他设备上进行显示和存储。
6. 异常处理:在测速过程中,如果出现异常情况,如霍尔传感器故障、信号干扰等,系统会进行相应的故障诊断和处理,以确保系统的稳定性和可靠性。
以上是利用电动自行车后轮无刷直流电机霍尔信号的一种测速方法,具有简单、方便、准确等优点。
毕业设计论文-基于霍尔元件的自行车速度感应器设计

基于霍尔元件的自行车速度感应器设计随着居民生活水平的不断提高,自行车不再仅仅是普通的运输、代步的工具,而是成为人们娱乐、休闲、锻炼的首选。
自行车的速度里程表能够满足人们最基本的需求,让人们能清楚地知道当前的速度、里程等物理量。
本论文主要阐述一种基于霍尔元件的自行车的速度里程表的设计。
以AT89C52单片机为核心,A44E霍尔传感器测转数,实现对自行车里程/速度的测量统计,采用24C02实现在系统掉电的时候保存里程信息,并能将自行车的里程数及速度用LED实时显示。
文章详细介绍了自行车的速度里程表的硬件电路和软件设计。
硬件部分利用霍尔元件将自行车每转一圈的脉冲数传入单片机系统,然后单片机系统将信号经过处理送显示。
软件部分用汇编语言进行编程,采用模块化设计思想。
该系统硬件电路简单,子程序具有通用性,完全符合设计要求。
关键词:里程/速度;霍尔元件;单片机;LED显示ABSTRACTWith the developing of people 'lisfe, the bicycle is not only the universal tool of transportation and substitute for walking, but becomes the first choice of entertainment and exercising. The bicycle mileage/speed can fulfill the basic need of people ' s life, so that they can learn the speed and the mileage of the bicycle. In this paper, the bicycle mileage/speed design based on the Hall element is elaborated. By AT89C52 as kernel, using A44E Hall element to measure revolution, the measure and statistic are achieved. The range information is saved by24C02 when the power is off, the bicycle speed can be displayed on LED. In this article, the hardware circuit and software design of bicycle mileage/speed instrument are introduced in detail. About the hardware, the pulse number is transmitted of one cycle of the bicycle into Single Chip Microcomputer system. Then the signal processed by Single Chip Microcomputer system is sent to display scream. About the software, in assemble language; the program is designed in the mode of modules. The system has simple hardware, common sub-program, and meets the demand of design.KEY WORDS: Mileage / speed; Hall element; Single chip microcomputer; LED1绪言 (1)1.1课题背景 (1)1.2课题的主要任务及内容 (1)2自行车的速度里程表总体方案设计 (2)2.1任务分析与实现 (2)2.2自行车的速度里程表硬件方案设计 (2)2.3自行车的速度里程表软件方案设计 (4)3自行车的速度里程表硬件电路设计 (5)3.1概述3.2传感器及其测量系统 (5)3.2.1 霍尔传感器的测量原理 (5)3.2.2集成开关型霍尔传感器 (6)3.3单片机的原理及应用 (7)3.3.1单片机原理简介 (7)3.3.2单片机的引脚功能介绍................ 错误!未定义书签3.3.3单片机中断系统介绍.................. 错误!未定义书签3.3.4单片机定时/计数功能介绍 ............... 错误!未定义书签3.4其他器件的介绍..................... 错误!未定义书签3.4.1存储器的介绍..................... 错误!未定义书签3.4.2 74LS74芯片的介绍................ 错误!未定义书签3.4.3 74LS244芯片的介绍................ 错误!未定义书签3.5单片机外围电路的设计................. 错误!未定义书签3.5.1时钟电路的设计.................. 错误!未定义书签3.5.2 复位电路的设计.................. 错误!未定义书签3.5.3显示电路的设计................... 错误!未定义书签3.5.4报警电路的设计.................. 错误!未定义书签4自行车的速度里程表软件程序设计.............. 错误!未定义书签4.1概述.......................... 错误!未定义书签4.2自行车的速度里程表总体程序设计............. 错误!未定义书签4.3中断子程序的设计..................... 错误!未定义书签4.4数据处理子程序的设计.................. 错误!未定义书签4.5显示子程序的设计..................... 错误!未定义书签5系统调试与分析....................... 错误!未定义书签5.1系统仿真调试..................... 错误!未定义书签5.2调试故障及原因分析................... 错误!未定义书签6结论与展望......................... 错误!未定义书签6.1结论.......................... 错误!未定义书签6.2展望.......................... 错误!未定义书签致谢............................. 错误!未定义书签参考文献........................... 错误!未定义书签附录............................. 错误!未定义书签1.1课题背景自行车被发明及使用到现在已有两百多年的历史,这两百年间人类在不断的尝试与研发过程中,将玩具式的木马车转换到今日各式新颖休闲运动自行车,自行车发展的目的也从最早的交通代步的工具转换成休闲娱乐运动的用途。
霍尔传感器自行车车速超速报警装置

霍尔传感器自行车车速超速报警装置随着人们对健康生活的追求日益增加,自行车成为了一种非常受欢迎的交通工具。
有时骑车过快可能会带来一些安全隐患。
为了提高骑行安全性,我设计了一种基于霍尔传感器的自行车车速超速报警装置。
让我们来了解一下霍尔传感器。
霍尔传感器是一种能够探测磁场的传感器,它可以将磁场变化转换为电信号。
我们可以利用霍尔传感器来测量自行车车轮的转速,从而计算出车速。
装置的工作原理如下:装置由霍尔传感器、磁铁、Arduino控制器和蜂鸣器组成。
我们将霍尔传感器固定在自行车车架上的一个固定位置。
然后,在自行车车轮的辐条上安装一个小磁铁。
当车轮转动时,磁铁会靠近霍尔传感器并产生一个磁场变化信号。
霍尔传感器会将这个信号转换为电信号传递给Arduino控制器。
在Arduino控制器中,我们编写了一个程序来将霍尔传感器的信号转换为车速。
我们可以根据车轮的大小和磁铁在车轮上的位置来确定转速和车速的关系。
一旦车速超过设定的安全速度,Arduino控制器将触发蜂鸣器发出警报声音。
这样,骑车者就会意识到车速过快,并及时采取措施减速,以提高骑行安全性。
这种自行车车速超速报警装置具有一些优点。
它非常简单且成本较低,因为我们只需要使用一些基本的电子器件和材料。
它实时监测车速,并能够及时发出警报,极大地提高了骑行安全性。
我们可以根据实际需求来调整安全速度,以适应不同的路况和特定的骑行需求。
这种自行车车速超速报警装置也存在一些局限性。
装置的警报只是通过蜂鸣器进行声音提醒,可能在嘈杂的环境中难以听到。
由于自行车的骑行速度可能受到多种因素的影响,例如坡度、风速等,所以需要根据实际情况来调整安全速度的阈值。
通过利用霍尔传感器设计一种自行车车速超速报警装置可以有效提高骑行安全性。
这种装置简单实用、成本低廉,可以实时监测车速并及时发出警报。
在实际使用中,我们还需要综合考虑其他因素,如环境噪声和实际骑行需求,来进一步完善和优化这种装置。
霍尔传感器自行车车速超速报警装置

霍尔传感器自行车车速超速报警装置随着人们生活水平的提高和环保意识的增强,骑行自行车已成为一种流行的健康生活方式。
自行车骑行中存在的安全隐患也是不可忽视的。
特别是在高速行驶时,自行车骑行者很容易因为无法准确把握车速而导致意外发生。
为了提高自行车骑行的安全性,霍尔传感器自行车车速超速报警装置应运而生。
一、霍尔传感器自行车车速超速报警装置的基本原理霍尔传感器自行车车速超速报警装置主要由霍尔传感器、微处理器、报警器和电池等组成。
霍尔传感器主要用于感知自行车车轮的转动速度,并将感知到的数据传输给微处理器进行处理。
微处理器根据接收到的霍尔传感器数据,通过预设的算法进行计算,从而准确把握自行车的车速情况。
当车速超过预设的安全速度时,微处理器会发出报警信号并通过报警器进行声光提示,提醒骑行者降速。
二、霍尔传感器自行车车速超速报警装置的优势1. 精准可靠:霍尔传感器具有高精度和长寿命的特点,能够准确感知车轮的转动速度,并将数据传输给微处理器进行处理,保证报警装置的准确性和可靠性。
2. 实时监测:装置可以实时监测车速情况,一旦超速就能及时进行报警,有效避免了因车速过快而导致的安全隐患。
3. 方便安装:该装置采用无线设计,安装简便,不需要繁琐的布线,只需将霍尔传感器固定在车轮上,将报警器装在骑行者能够看到的位置即可。
4. 多种警报方式:报警器可根据骑行者的需求进行设置,可以选择声光提示、震动提示等多种方式进行警报,确保骑行者能够及时收到报警信号。
三、霍尔传感器自行车车速超速报警装置的应用场景1. 骑行爱好者:对于经常骑行的爱好者来说,超速报警装置能够提醒他们在高速骑行时注意控制车速,增加骑行的安全性。
2. 骑行比赛:在自行车比赛中,骑手往往要保持高速骑行,而超速报警装置能够及时提醒他们保持安全驾驶,避免因车速过快而发生意外。
3. 学生骑行:对于学生来说,自行车是他们日常出行的主要方式之一,而超速报警装置能够帮助他们养成安全骑行的好习惯,避免发生意外。
霍尔器件制作自行车测速仪
《电路与电子线路基础(2)》课程项目总结报告题目(A):用霍尔器件制作一个自行车组号: A 11任课教师:组长:成员:成员:成员:成员:联系方式:二零一五年一月十日【元件简介】1.霍尔元件霍尔器件是常用的磁传感器,当磁铁靠近霍尔器件时就会产生信号,利用这个信号可以测量位置距离角度等。
霍尔效应,是指磁场作用于载流金属导体、半导体中的载流子时,产生横向电位差的物理现象。
单极性霍尔开关的感应方式:磁场的一个磁极靠近它,输出低电位电压(低电平)或关的信号,磁场磁极离开它输出高电位电压(高电平)或开的信号,但要注意的是,单极性霍尔开关它会指定某磁极感应才有效,一般是正面感应磁场S极,反面感应N极。
当自行车匀速转动时便会产生如下负脉冲信号,此时负脉冲信号的频率就是自行车车轮转动的频率。
2.LM331LM331是美国NS公司生产的性能价格比较高的集成芯片,可用作精密频率电压转换器、A/ D 转换器、线性频率调制解调、长时间积分器及其他相关器件。
Lm331内部原理图LM331引脚图【实验方案】我们小组准备将磁体安装在旋转面上,同时将霍尔器件固定在磁体经过的弧线上,这样当磁铁靠近霍尔器件时就会产生一个负脉冲信号。
将脉冲信号通过由LM331、电阻、电容组成的频率/电压转换电路将其线性地转化为电压,即可利用电压表来指示自行车的速度。
RC L 的平均放电电流为V o /R L ,因为放电较慢,C L 上的电压V o 基本不变 当C L 充放电平均电流平衡时,得V o =I ×(1.1R t C t )×f i ×R L式中I 是恒流电流,I=1.90V/R S式中1.90V 是LM331内部的基准电压(即2脚上的电压)。
于是得i t t SLo f C R R R 09.2V = 可见,当R S 、R t 、C t 、R L 一定时,V o 正比于f i ,显然,要使V o 与f i 之间的关系保持精确、稳定,则上述元件应选用高精度、高稳定性的。
自行车测速仪的设计

摘要随着居民生活水平的不断提高,自行车不再仅仅是普通的运输、代步的工具,而是成为人们娱乐、休闲、锻炼的首选。
自行车测速仪能够满足人们最基本的需求,让人们能清楚地知道当前的速度、里程、时间、温度等物理量。
本论文主要阐述一种基于霍尔元件的自行车测速仪的设计。
本文以STC89C54RD+单片机为核心,霍尔传感器测转数,实现对自行车里程、速度、时间、温度的测量统计,能将自行车的里程及速度用LCD实时显示。
文章详细介绍了自行车测速仪的硬件电路和软件设计。
硬件部分利用霍尔元件将自行车每转一圈的脉冲数传入单片机系统,然后单片机系统将信号经过处理送LCD显示。
软件部分用C语言进行编程,采用模块化设计思想。
该系统硬件电路简单,子程序具有通用性,已达到设计目标。
关键词:速度;温度;霍尔元件;单片机目录第1章绪论 (1)1.1 国内外自行车测速仪的发展现状及趋势 (1)1.2 本论文的研究内容 (2)第2章自行车测速仪的总体设计方案 (4)2.1 单片机选型 (4)2.1.1 单片机介绍 (4)2.1.2 单片机性能比较 (4)2.1.3 最终方案 (5)2.2 测速传感器选型 (5)2.2.1 测速传感器的介绍 (5)2.2.2 测速传感器的比较 (6)2.2.3 最终结论 (6)2.3 温度传感器选型 (7)2.3.1 温度传感器介绍 (7)2.3.2 温度传感器性能比较 (8)2.3.3 最终方案 (9)2.4 显示器选型 (9)2.4.1 显示器介绍 (10)2.4.2 显示器性能 (10)2.4.3 最终方案 (11)2.5 时钟芯片的选型 (12)第3章硬件设计 (13)3.1 单片机外围电路 (13)3.1.1 单片机的介绍 (13)3.1.2 单片机外围电路图 (15)3.2 速度模块的设计 (15)3.2.1 霍尔元件的介绍 (16)3.2.2 霍尔传感器硬件电路图 (17)3.3 温度模块的设计 (18)3.3.1 温度传感器的介绍 (18)3.3.2 DS18B20硬件电路图 (21)3.4 时钟模块的设计 (22)3.4.1时钟芯片的介绍 (22)3.4.2 DS1302硬件电路图 (25)3.5 显示模块的设计 (25)3.5.1 LCD芯片介绍 (26)3.5.2 LCD硬件电路图 (27)第4章软件设计 (28)4.1 主程序设计 (28)4.2 计算速度里程程序设计 (29)4.3 温度显示程序设计 (30)4.4 时钟芯片程序设计 (30)4.5 LCD1602软件设计 (32)4.5.1 LCD1602时序介绍 (32)4.5.2 LCD1602具体软件设计 (33)第5章测试 (35)5.1 Proteus及Keil软件简介 (35)5.1.1 Proteus软件 (35)5.1.2 Keil软件 (35)5.2 应用Keil软件进行程序调试 (36)5.3 Proteus软件仿真 (36)5.4 硬件软件联合调试 (37)5.4.1 联调步骤 (37)5.4.2 硬件静态调试 (38)第6章结论与展望 (40)致谢 (41)参考文献 (42)附录1 Protreus仿真图 (43)附录2 源程序 (44)第1章绪论自行车被发明及使用到现在已有两百多年的历史,这两百年间人类在不断的尝试与研发过程中,将玩具式的木马车转换到今日各式新颖休闲运动自行车,自行车发展的目的也从最早的交通代步的工具转换成休闲娱乐运动的用途。
自行车码表的原理
自行车码表的原理在自行车上加上一个里程速度表,你不仅可以掌握自己寄车的速度,而且可以知道自己寄车的里程,从而控制运动量。
本文介绍一种用单片机制作的自行车里程速度表,里程和速度显示可进行转换,采用三位数码管显示,里程最大可显示99.9km,速度最大可显示99.9km/h。
它也可以安装在电动自行车和速度不超过100km/h的摩托车上使用。
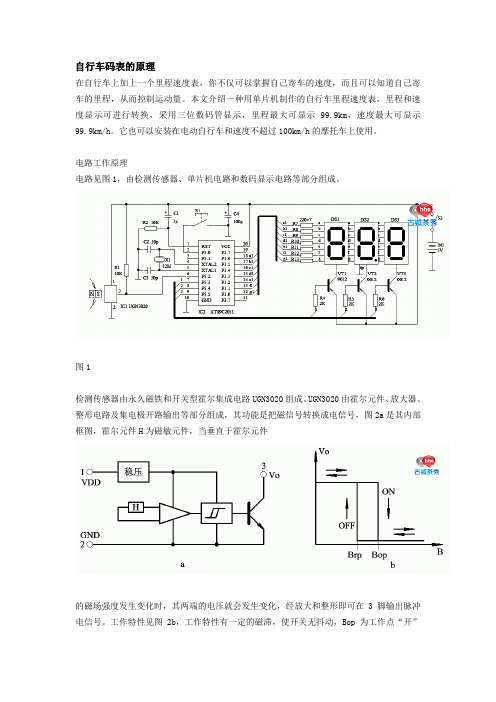
电路工作原理电路见图1,由检测传感器、单片机电路和数码显示电路等部分组成。
图1检测传感器由永久磁铁和开关型霍尔集成电路UGN3020组成。
UGN3020由霍尔元件、放大器、整形电路及集电极开路输出等部分组成,其功能是把磁信号转换成电信号,图2a是其内部框图,霍尔元件H为磁敏元件,当垂直于霍尔元件的磁场强度发生变化时,其两端的电压就会发生变化,经放大和整形即可在3脚输出脉冲电信号。
工作特性见图2b,工作特性有一定的磁滞,使开关无抖动,Bop为工作点“开”的磁场强度,Brp为释放点“关”的磁场强度。
永久磁铁固定在车轮的辐条上,UGN3020固定在车轮的叉架上。
检测传感器的工作原理如下,车轮每转动一周,磁铁就经过UGN3020一次,从而其3脚就输出一个脉冲信号。
UGN3020输出的脉冲信号作为单片机集成电路AT89C2051的外部中断信号,从P3.2口输入。
由单片机测量脉冲信号的个数和脉冲周期。
测量脉冲信号的个数可计算出里程,测量脉冲信号的周期可计算出速度,当然这此计算都是由单片机完成的,我们看到的是数码管上的显示结果。
按钮开关S1用来对显示里程和速度进行切换,电路的初始状态为显示速度。
数码管DS1~DS3、VT1~VT3、R4~R13等组成数码显示电路。
本机采用动态扫描显示的方式,使用共阳数码管, P3.3-P3.5口作三个数码管的动态扫描位驱动码输出,通过三极管驱动数码管。
P1.0-P1.6口作数码显示七段笔划字形码的输出,用以驱动数码管的各字段。
程序设计程序用C语言编写,由主程序、外部中断0服务程序、定时器T0中断服务程序、延时子程序等模块组成。
霍尔传感器自行车车速超速报警装置
霍尔传感器自行车车速超速报警装置霍尔传感器自行车车速超速报警装置是一种用于自行车的安全装置。
当自行车运行时,霍尔传感器可以感知车轮的转动速度,并实时监测车速。
当车速超过设定的安全速度时,报警装置会触发警报,提醒骑车者减速或注意安全。
霍尔传感器是一种基于霍尔效应的传感器,常用于测量磁场强度和磁场方向。
在自行车上,霍尔传感器常安装在车轮附近,通过感应车轮上的磁性物质,来测量车轮的转动。
当车轮转动时,车轮上的磁性物质会接近霍尔传感器,磁场强度发生变化,从而触发传感器输出,产生电信号。
通过电路连接,霍尔传感器的输出信号可以传递到报警装置中。
报警装置通常由一个控制电路、一个警报器和一个显示屏组成。
控制电路可以接收传感器的信号,并进行处理。
当车速超过设定的安全速度时,控制电路可以通过控制警报器触发声音或光线警报,同时在显示屏上显示警示信息。
报警装置的安全速度可以根据骑车者的需求进行设定。
在城市骑行中,通常将安全速度设定为30km/h左右;在山地骑行中,安全速度可以适当提高,以应对更高的速度和复杂的路况。
骑车者可以根据自己的实际情况来选择适当的安全速度。
这种报警装置还可以配备其他功能。
可以设置超速记忆功能,当车速超过安全速度时,装置可以记录超速的次数和时间,以便骑车者进行统计和分析。
装置还可以设置静音模式,当骑车者不需要警报时,可以通过按键来关闭声音或光线警报。
除了安装在自行车上,霍尔传感器自行车车速超速报警装置也可以通过蓝牙或无线网络连接到手机或其他智能设备上。
骑车者可以通过手机App来监测车速,并接收报警装置的警报。
这样,骑车者可以更方便地得到警示信息,并及时采取相应的措施。
自行车测速仪设计报告
电子设计竞赛设计报告题目: 自行车测速仪学 院 电子信息工程学院 学科门类 工学 专 业 电气工程及其自动化 学 号 2010448114 2010448131 姓 名 李炜 赵向辉2011年12月21日自行车测速仪装订线摘要本课题实验主要是利用STC89C52RC、12864液晶、24C02E^2PROM、霍尔传感器和加速度倾角传感器来实现自行车测速功能。
通过霍尔传感器来采集信号,经过单片机处理后,由12864液晶显示其总里程,分里程,速度,加速度;信号经过加速度倾角传感器读出坡度值,并在12864液晶中显示出来;然后由数学公式计算出消耗的卡路里值。
12864显示页面一共有三面。
按键具有调控展现的页面,清除分里程数据,保存总里程数据的功能,利用24C02实现断电不消失的功能。
发光二极管模块,利用MOS管的特性可以实现在暗处自动点亮。
关键词:自行车测速仪;霍尔传感器A3144;加速度倾角传感器MMA7455;12864LCDBicyle SpeedometerABSTRACTThis work mainly realize speed bike function by using the MCU of the STC89C52RC, 12864 LCD,24C02E^2PROM,Hall sensors and Angle acceleration sensor. The signal was collected by the Hall sensors and then it will be handled by the MCU.After that,the MCU will give commands and instructions to let the LCD display the information which contains the total mileage,part mileage,speed,accelerate,ascent and the calorie consumed.There are three pictures of the LCD,changed by a key switch.The function of the other keys were made up of clearing of the part distance and save the total distance.Also,there is another function module,called automatic light,which controlled by the LDR.Key words:Bicyle speedometer;Hall sensors;Angle acceleration sensor;12864LCD目录1设计要求................................2设计方案................................2.1 芯片的选择...............................2.2 霍尔传感器与单片机的通信..............2.3 12864液晶屏与单片机..................2.4 单片机与24C02 ........................2.5 单片机与MMA7455 ......................2.6 单片机下载程序........................3总体方案................................3.1工作原理.............................3.2总体设计.............................4系统硬件设计............................4.1STC89C52RC单片机最小系统.............4.2各部分电路电路图.....................4.3整体电路.............................5系统软件设计............................5.1主程序流程...........................参考文献....................................附录........................................1设计要求1.1 发光二极管模块在暗处自动点亮功能。
利用电动自行车后轮无刷直流电机霍尔信号的一种测速方法

利用电动自行车后轮无刷直流电机霍尔信号的一种测速方法摘要:一、无刷直流电机霍尔测速原理二、电动自行车后轮无刷直流电机霍尔信号测速方法1.一路霍尔信号测速方法2.三路霍尔信号测速方法三、以STM32单片机为核心的转速测量系统四、总结正文:一、无刷直流电机霍尔测速原理无刷直流电机的工作原理本质上与有刷电机类似,不同之处在于无刷电机采用电子方式对绕组电流换向。
直流电机中的转矩是通过永磁体磁场和绕组中的电流相互作用产生的。
霍尔位置传感器探测转子旋转磁场的位置,通过逻辑与驱动电路,给相应的绕组激励。
二、电动自行车后轮无刷直流电机霍尔信号测速方法1.一路霍尔信号测速方法利用一路霍尔信号进行转速测量时,可以通过计算相同时间间隔内传感器输出的脉冲个数来获得转速。
设霍尔传感器输出的信号每转R个脉冲,对应的转速为N(r/min),则通过计算脉冲频率与60的比值,即可得到转速。
2.三路霍尔信号测速方法利用三路霍尔信号进行转速测量时,可以通过逻辑电路或算法产生六倍于一路霍尔信号频率的倍频信号,然后对其进行测量。
这种方法可以提高测速的准确性。
三、以STM32单片机为核心的转速测量系统以STM32单片机为核心搭建转速测量系统,可以实现对电动自行车后轮无刷直流电机的精确测速。
通过处理霍尔传感器输出的信号,实时监测电机转速,为用户提供准确的行驶速度信息。
四、总结利用电动自行车后轮无刷直流电机霍尔信号进行测速的方法具有较高的实用价值。
通过一路或三路霍尔信号的测量,可以实现对电机转速的准确监测。
以STM32单片机为核心的转速测量系统,进一步提高了测速的准确性和可靠性,为电动自行车用户提供实用的行驶速度信息。
霍尔传感器自行车车速超速报警装置

霍尔传感器自行车车速超速报警装置一、设计方案1. 霍尔传感器霍尔传感器是一种用于测量磁场的数字传感器。
当霍尔传感器处于磁场中时,会产生一个电压,这个电压与磁场的强度和方向有关。
在自行车车轮旋转时,车轮的磁场会影响到处于轮轴上的霍尔传感器,从而产生电压信号。
2. 超速报警装置超速报警装置由霍尔传感器、微控制器、显示屏、蜂鸣器等元件组成。
当自行车车速过快时,霍尔传感器会产生高电压信号,微控制器会检测到这个信号,从而发出报警信号,同时显示屏会显示超速警告信息,蜂鸣器也会发出报警声音。
二、装置原理自行车车速的计算公式为:车速=轮径×π×转速÷60。
因此,我们可以通过测量自行车车轮的转速来计算车速。
而当车速超过设定值时,超速报警装置会发出警报。
三、硬件设计在霍尔传感器中,有一种叫做A3144的传感器,它是一种开关传感器,只有在磁场达到一定程度时才会开关。
因此,我们可以根据A3144的输出来判断车轮是否在运动。
2. 微控制器的选择微控制器是超速报警装置的核心。
我们可以选择一些成本比较低廉的微控制器,如STM8S系列或AT89S系列。
3. 显示屏的选择显示屏可以选择OLED显示器或液晶显示器,这些显示器具有显示清晰、使用方便等特点。
在显示屏上可以显示当前车速、超速警告信息等内容。
蜂鸣器用来发出警报声音,可以选择常用的压电型蜂鸣器或有源型蜂鸣器。
在软件设计方面,我们需要编写一段程序来完成以下功能:1. 采集霍尔传感器的输出信号,计算车速;2. 比较当前车速和设定值,发出警报信号并显示警告信息;3. 根据用户的要求,可以设置超速报警的阈值。
五、总结本文提出的基于霍尔传感器的自行车车速超速报警装置,可以有效地提高自行车行驶的安全性。
未来,我们将继续进行实验和改进,让这个装置可以在不同场合和不同条件下适用。
自行车测速仪的设计说明书

《电子线路综合设计》课程设计说明书题目:__自行车测速________摘要本设计主要阐述一种基于单片机与霍尔传感器等元件的测速仪设计。
以AT89C51单片机为核心,实现对自行车里程、速度、时间、等参数的测量,并能简单的将里程及速度用1602实时显示。
在本文中详细介绍了测速仪的硬件电路和软件设计。
硬件部分利用霍尔传感器将每秒内的脉冲数传入单片机系统,然后经单片机系统计算处理并将过处理结果送1602显示。
软件的设计采用模块化结构,使程序的逻辑关系更加简洁。
使硬件在软件的控制下协调运作。
仿真,所设计的硬件电路及软件程序是正确的,实际的硬件电路中也基本上能够满足设计要求。
关键词:里程/速度,时间,霍尔元件,单片机,1602AbstractThis design mainly elaborated based on MCU and Hall element of speed instrument design. Take STC MCU as the core, Hall element speed, realizes to the bicycle mileage, speed, time measurement, and a simple bicycle mileage and speed with the 1602 real time display. The hardware part using the Hall element will bike per second pulse number of incoming MCU system, and then by the single chip microcomputer system calculation processing and processing result to the 1602 display. Program design in order to facilitate the expansion and the change, the software design uses the modular structure, make the logic relations more concise. Make hardware tocoordinatethe operation under the software control. Simulation experiments show that the designed hardware circuit and software program are correct, practical hardware circuit also basically can satisfy the design requirement, but due to the knowledge, in practice there are still some problems in the hardware circuit.Keywords: Mileage / speed,time, Hall element, MCU, 16021.设计要求:(1) 对自行车进行实时速度的测量,显示出速度值。
基于单片机的自行车速度测试仪设计 2

毕业设计(论文)题目:基于单片机的自行车转速测试仪设计学生:陈丽君指导老师:高海莺系别:电子信息与通信工程系专业:电子信息工程班级:电子1001学号:10300101462014年5月福建工程学院本科毕业论文作者承诺保证书本人郑重承诺:本篇毕业论文的内容真实、可靠。
如果存在弄虚作假、抄袭的情况,本人愿承担全部责任。
学生签名:年月日福建工程学院本科毕业论文指导教师承诺保证书本人郑重承诺:我已按有关规定对本篇毕业论文的选题与内容进行了指导和审核,该同学的毕业论文中未发现弄虚作假、抄袭的现象,本人愿承担指导教师的相关责任。
指导教师签名:年月日目录摘要 (5)Abstract (6)1、绪言 (7)1.1课题背景及意义 (7)1.2课题的主要任务及内容 (7)2、系统方案选择与论证 (8)2.1系统组成 (8)2.2任务分析及实现 (8)2.3模块方案选择与论证 (9)2.3.1物理采集模块 (9)2.3.2液晶显示模块 (10)3、系统硬件设计与实现 (12)3.1转速物理量转换过程 (12)3.2波形的整形 (12)3.3显示模块 (13)3.4核心模块 (14)3.4.1 Pic系列单片机具有以下几个特点 (14)3.4.2 pic16f877a单片机的结构及物理外形 (15)3.4.3 pic16f877a单片机的引脚 (16)3.4.4 数据处理 (18)4、系统软件设计与实现 (19)4.1霍尔元件的流程图 (19)4.2 555芯片的流程图 (19)4.3 LCD软件设计及内部时序 (19)4.4 pic16f877a单片机模块 (21)5.系统仿真与调试 (23)5.1程序编译过程(用maplab软件烧写) (23)5.2 仿真软件proetous使用 (24)结束语 (27)致谢 (28)参考文献 (29)附件1 程序代码 (30)附件2 实物演示 (37)基于单片机的自行车转速测试仪设计摘要在社会的发展、科技的进步、人类文明不断完善的过程中,伴随着环境的污染、食品安全等一系列相关的问题产生。
MSP430G2553制作的自行车测度系统
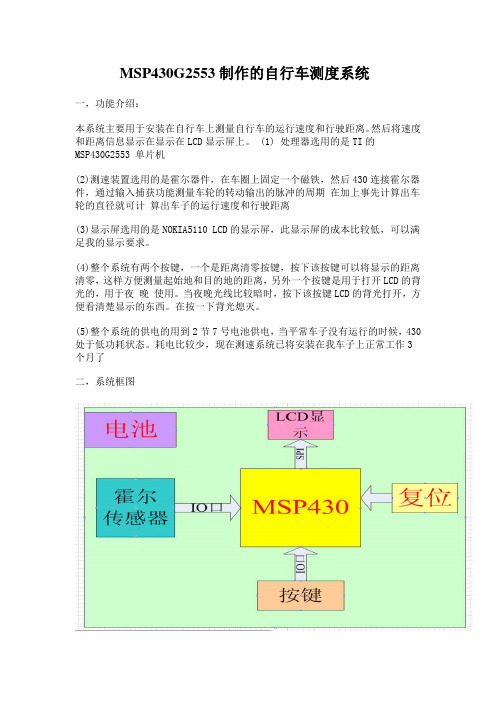
MSP430G2553制作的自行车测度系统一,功能介绍:本系统主要用于安装在自行车上测量自行车的运行速度和行驶距离。
然后将速度和距离信息显示在显示在LCD显示屏上。
(1) 处理器选用的是TI的MSP430G2553 单片机(2)测速装置选用的是霍尔器件,在车圈上固定一个磁铁,然后430连接霍尔器件,通过输入捕获功能测量车轮的转动输出的脉冲的周期在加上事先计算出车轮的直径就可计算出车子的运行速度和行驶距离(3)显示屏选用的是NOKIA5110 LCD的显示屏,此显示屏的成本比较低,可以满足我的显示要求。
(4)整个系统有两个按键,一个是距离清零按键,按下该按键可以将显示的距离清零,这样方便测量起始地和目的地的距离,另外一个按键是用于打开LCD的背光的,用于夜晚使用。
当夜晚光线比较暗时,按下该按键LCD的背光打开,方便看清楚显示的东西。
在按一下背光熄灭。
(5)整个系统的供电的用到2节7号电池供电,当平常车子没有运行的时候,430处于低功耗状态。
耗电比较少,现在测速系统已将安装在我车子上正常工作3个月了二,系统框图图1是整个系统的框图. LCD显示屏和MSP430G2553的连接采用的SPI接口,霍尔传感器和按键和430之间是IO口连接。
三,系统原理图图2是整个系统的原理图四,程序代码//******************************************************************* ***********#include#include#include#includeunsigned char Count, First_Time;unsigned int REdge1, REdge2, FEdge;unsigned char MST_Data, SLV_Data;#define DC P2OUT = P2OUT|(1<<5)#define SCE P2OUT = P2OUT|(1<<4)#define CLK_H P1OUT=P1OUT|(1<<5)#define CLK_L P1OUT=P1OUT&(~(1<<5))#define Data_H P1OUT=P1OUT|((1<<7))#define Data_L P1OUT=P1OUT&(~(1<<7))#define u8 unsigned char#define u16 unsigned inttypedef struct{u8 x;u8 y;}point;/*------5110屏幕尺寸和功能宏定义------*/#define DATA 1 //数据#define CMD 0 //命令#define LCD_X 84 //液晶屏横坐标宽度#define LCD_ROW LCD_X //液晶屏列宽度void LCD_write_byte(unsigned char dat, unsigned char command); void LCD_init(void);void LCD_init(void);void LCD_set_XY(unsigned char X, unsigned char Y);void LCD_clear(void);void LCD_write_char(unsigned char c);void LCD_write_String(unsigned char X,unsigned char Y,unsigned char *s); void LCD_write_byte(unsigned char dat, unsigned char command){unsigned int i;// LCD_SCE = 0; //5110片选有效,允许输入数据P2OUT &=~BIT4;if (command == 0) //写命令// LCD_DC = 0;P2OUT &=~BIT5;else // LCD_DC = 1;P2OUT |=BIT5;//写数据for (i=0;i<8;i++){CLK_L;//spi_clk=0;if((dat & 0x80)==0x80){Data_H;}else{Data_L;}CLK_H; // spi_clk=1;dat=(dat<<1);}P2OUT |=BIT4;}void LCD_init(void){P2OUT &=~BIT4;P1OUT &= ~BIT4;P1OUT |= BIT4;LCD_write_byte(0x21, 0); // LCD模式设置:芯片活动,水平寻址,使用扩展指令LCD_write_byte(0xc8, 0); // 设置液晶偏置电压LCD_write_byte(0x06, 0); // 温度校正LCD_write_byte(0x13, 0); // 1:48LCD_write_byte(0x20, 0); // 使用基本命令,V=0,水平寻址LCD_clear(); // 清屏LCD_write_byte(0x0c, 0); // 设定显示模式,正常显示P2OUT |=BIT4;}void LCD_set_XY(unsigned char X, unsigned char Y){LCD_write_byte(0x80 | X, 0); // X 行(横坐标)LCD_write_byte(0x40 | Y, 0); // column 列(纵坐标)}/*------------------------------------------//LCD_clear: LCD清屏函数--------------------------------------------*/void LCD_clear(void){unsigned char t;unsigned char k;LCD_set_XY(0,0);for(t=0;t<6;t++){for(k=0;k<84;k++){LCD_write_byte(0x00,1);}}}void LCD_write_char(unsigned char c){unsigned char i;c-=0x20; //ASCII码减去 0x20for (i=0; i<6; i++)LCD_write_byte(ASCII_6_8[c], 1);}void LCD_write_String(unsigned char X,unsigned char Y,unsigned char *s){LCD_set_XY(X,Y);while (*s) //等效*s!='\0'{LCD_write_char(*s);s++;}}static float speed;static unsigned char display[10];static unsigned char display2[10];static unsigned int temp ;static unsigned int distance=0;static float Period;static float Distance_km;int main(void){volatile unsigned int i;unsigned char lcd_buf[6][84];WDTCTL = WDTPW + WDTHOLD; // Stop watchdog timerP1DIR |= BIT0; // P1.0/LED OutputP1OUT &= ~BIT0; // LED offif (CALBC1_8MHZ==0xFF) // If calibration constant erased {while(1); // do not load, trap CPU!!}DCOCTL = 0; // Select lowest DCOx and MODx settingsBCSCTL1 = CALBC1_8MHZ; // Set DCO to 8MHzDCOCTL = CALDCO_8MHZ;P1DIR &= ~BIT2;P1SEL |= BIT2;P2DIR &= ~BIT2;P2DIR &= ~BIT1;P2IES |=BIT2+BIT1;P2IE |=BIT2+BIT1;P1DIR |= BIT0;P1DIR|=BIT4|BIT5|BIT7;TA0CCTL1 = CAP + CM_3 + CCIE + SCS + CCIS_0;TA0CTL |= TASSEL_1 + MC_2 + TACLR; // ACLK, Cont Mode; start timer Count = 0x0;First_Time = 0x01;P2OUT = 0x00;P2DIR |=BIT5+BIT4 ;P1DIR |=BIT4 ;_EINT();P1OUT &= ~BIT4; // Now with SPI signals initialized,P1OUT |= BIT4; // reset slaveLCD_init(); //初始化LCD模块LCD_clear(); //清屏幕LCD_write_String(0,1,"Speed:");LCD_write_String(60,1,"km/h");LCD_write_String(0,3,"Dista:");while(1){__bis_SR_register(LPM0_bits+GIE); // Enter LPM0 Period = REdge2 - REdge1; // Calculate Period speed = 1.0362*(32768/Period)*3.6;memset(display,0,sizeof(display));sprintf((char*)display,"%4.1f",speed);LCD_write_String(36,1," ");LCD_write_String(36,1,display);LCD_write_String(60,1,"km/h");LCD_write_String(50,3," ");Distance_km=(float)distance*2.073656/1000.0;if(Distance_km<1){LCD_write_String(34,3," ");Distance_km=Distance_km*1000;sprintf((char*)display2,"%d",(int)Distance_km); LCD_write_String(44,3,display2);}else{LCD_write_String(36,3," ");sprintf((char*)display2,"%6.3f",Distance_km); LCD_write_String(34,3,display2);LCD_write_String(72,3,"km");}}}// TA0_A1 Interrupt vector#pragma vector = TIMER0_A1_VECTOR__interrupt void TIMER0_A1_ISR (void){switch(__even_in_range(TA0IV,0x0A)){case TA0IV_NONE: break; // Vector 0: No interrupt case TA0IV_TACCR1: // Vector 2: TACCR1 CCIFG// distance++;if (TA0CCTL1 & CCI) // Capture Input Pin Status {distance++;if (!Count){REdge1 = TA0CCR1;Count++;}else{REdge2 = TA0CCR1;Count=0x0;__bic_SR_register_on_exit(LPM0_bits +GIE); // Exit LPM0 on return to main }if (First_Time)First_Time = 0x0;}else{if(!First_Time){FEdge = TA0CCR1;}}break;default: break;}}#pragma vector=PORT2_VECTOR__interrupt void PORT2 (void){unsigned int i;for(i=0;i<20000;i++);if(P2IFG&BIT1){distance=0;while(!(P2IN&BIT1));}if(P2IFG&BIT2){P1OUT=P1OUT^BIT0;while(!(P2IN&BIT2));}P2IFG=0x00;__bic_SR_register_on_exit(LPM0_bits +GIE); // Exit LPM0 on return to main }#define LCD_X 84 //液晶屏横坐标宽度#define LCD_ROW LCD_X //液晶屏列宽度。
霍尔传感器自行车车速超速报警装置

霍尔传感器自行车车速超速报警装置
随着人们生活水平的不断提高,越来越多的人开始关注健康和身体,特别是骑自行车的人越来越多了。
在这些自行车骑士中,有些人会超速骑行,导致危险和事故发生。
为了避免这种情况,我们设计了一种霍尔传感器自行车车速超速报警装置。
首先,我们需要了解霍尔传感器的原理。
霍尔传感器是一种利用霍尔效应测量磁场强度或检测磁性物体位置的传感器。
当磁性物体靠近传感器时,传感器会产生电信号,使开关打开或关闭。
我们可以利用这种原理来设计自行车车速传感器。
其次,我们需要安装传感器。
将传感器安装在车轮附近的骨架上,使其可以检测车轮旋转并产生信号。
然后,将传感器连接到一个微型电路板上,用于检测电信号并发出警报声。
接下来,我们需要编写代码。
我们需要为电路板编写一段简单的代码,告诉它如何检测超速骑行并发出警报声。
代码可以很简单,我们只需要在电路板上设置一个特定的速度阈值,当车速超过该阈值时,警报声会响起。
最后,我们需要测试设备。
通过手动旋转车轮来测试设备,检查是否可以准确地检测车速。
如果测试成功,我们就可以在实际骑行中使用该设备了。
总的来说,霍尔传感器自行车车速超速报警装置是一种简单而实用的设备,可以有效地避免超速骑行所引发的危险和事故。
虽然它只是一种简单的装置,但其功能和贡献不容忽视。
事实上,将这种装置推广到更多的自行车骑士中,可以有效地提高道路交通安全水平。
霍尔传感器自行车车速超速报警装置

霍尔传感器自行车车速超速报警装置随着社会的发展,人们生活水平越来越高,自行车不再仅仅是普通的交通工具,而是人们用来锻炼的首选之物。
速度里程表可以准确的记录骑行的速度及行驶过的里程。
本报告主要阐述一种基于霍尔元件的自行车的速度里程表的设计。
标签:51单片机;霍尔传感器;自行车里程/速度;LED实时显示1 目的51单片机是最关键的部分,旋转的圈数转换成电脉冲通过霍尔传感器来实现,然后根据霍尔传感器传输的数据进行处理,将处理过的数据在传送给单片机。
我们需要用定时器或者是计数器来对总的脉冲数进行统计,以及自行车的车轮在旋转一圈的时候所用的时间,单片机处理了之后,就可以算出里程和速度。
最后可以将结果用LED显示器展示出来。
2 要求(1)测量校园小蓝车的里程/速度;车轮半径是26cm;速度大于12km/h时,就会报警。
(2)霍尔传感器是产生脉冲信号的工具。
(3)需要对传感器传出的脉冲数据进行计数,我们在实际情况中通过使用单片机提供的计数器来对脉冲信号进行计数。
(4)我们需要用LED显示器来展现里程还有速度,然后进行相关数据的处理。
在实际的操作中我们需要用相关的软件来进行编程,处理数据,以获得所需的值。
以便实现我们最终的目的,也就是这个系行车的速度里程表具显示里程和骑行速度的功能,通过单片机来进行控制,并且显示电路能够显示速度和里程数。
3 系统的设计(1)硬件设计。
1)51单片机:用来储存测速和计数的程序,是控制的核心部分,51单片机的选择具有高速,低功耗,小尺寸和丰富的资源的优点。
2)1601液晶:它是液晶显示器的输出装置,用来显示自行车的速度,具有高显示,数字接口以及单片机接口具有简单、可靠、体积小、重量轻、低功耗的特点。
3)直流电源插座:与计算机监视器等专用电源相匹配的插座,为设备提供直流电源。
4)电阻:导体会对电流产生阻碍的作用。
导体的电阻会随着长度等因素的变化而变化,以欧姆为单位。
5)独立按键:它可以被用作普通按钮和中断信号。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
《电路与电子线路基础(2)》课程项目
总结报告
题目(A):用霍尔器件制作一个自行车
组号: A 11
任课教师:
组长:
成员:
成员:
成员:
成员:
联系方式:
二零一五年一月十日
【元件简介】
1.霍尔元件
霍尔器件是常用的磁传感器,当磁铁靠近霍尔器件时就会产生信号,利用这个信号可以测量位置距离角度等。
霍尔效应,是指磁场作用于载流金属导体、半导体中
的载流子时,产生横向电位差的物理现象。
单极性霍尔开关的感应方式:磁场的一个磁极靠近
它,输出低电位电压(低电平)或关的信号,磁场磁极离
开它输出高电位电压(高电平)或开的信号,但要注意的
是,单极性霍尔开关它会指定某磁极感应才有效,一般是
正面感应磁场S极,反面感应N极。
当自行车匀速转动时
便会产生如下负脉冲信号,此时负脉冲信号的频率就是自
行车车轮转动的频率。
2.LM331
LM331是美国NS公司生产的性能价格比较高的集成芯片,可用作精密频率电压转换器、A/ D 转换器、线性频率调制解调、长时间积分器及其他相关器件。
Lm331内部原理图
LM331引脚图
【实验方案】
我们小组准备将磁体安装在旋转面上,同时将霍尔器件固定在磁体经过的弧线上,这样当磁铁靠近霍尔器件时就会产生一个负脉冲信号。
将脉冲信号通过由LM331、电阻、电容组成的频率/电压转换电路将其线性地转化为电压,即可利用电压表来指示自行车的速度。
下为由LM331、电阻、电容组成的频率/电压转换电路的原理简介。
LM331用作FVC 时的原理框
-输入
比较器
定时比较器
+
+56
7
1s
Q
T
C t
R t
V CC 2/3V CC
9/10V CC
s
置“1”端
置“0”端
R
R L
C L
-V 0
fi 图5-1-1
+V Q
+10V
此时,○1脚是输出端(恒流源输出),○6脚为输入端(输入脉冲链),○
7脚接
比较电平。
工作过程(结合看图5-1-2所示的波形)如下:
2/3V CC
v ct
1.1R t C t
V 0
v CL
3.5v p-p
V CC
01/f i
t
1
s
t
图5-1-2
当输入负脉冲到达时,由于○6脚电平低于○
7脚电平,所以S=1(高电平),
Q =0(低电平)。
此时放电管T 截止,于是C t 由V CC 经R t 充电,其上电压V Ct 按指数规律增大。
与此同时,电流开关S 使恒流源I 与○1脚接通,使C L 充电,V CL 按线性增大,因恒流源对C L 充电。
经过1.1R t C t 的时间,V Ct 增大到2/3V CC 时,则R 有效(R=1,S=0),Q =1,C t 、C L 放电。
然后,又经过1.1R t C t 的时间返回到C t 、C L 放电。
以后就重复上面的过程,于是在R L 上就得到一个直流电压V o (这与电源的整流滤波原理类似),并且V o 与输入脉冲的重复频率f i 成正比。
C L 的平均充电电流为I ×(1.1R t C t )×f i
C L 的平均放电电流为V o /R L ,因为放电较慢,C L 上的电压V o 基本不变 当C L 充放电平均电流平衡时,得
V o =I ×(1.1R t C t )×f i ×R L
式中I 是恒流电流,I=1.90V/R S
式中1.90V 是LM331内部的基准电压(即2脚上的电压)。
于是得i t t S
L
o f C R R R 09
.2V = 可见,当R S 、R t 、C t 、R L 一定时,V o 正比于f i ,显然,要使V o 与f i 之间的关系保持精确、稳定,则上述元件应选用高精度、高稳定性的。
对于一定的f i ,要使V o 为一定值,可调节R S 的大小。
恒流源电流I 允许在10μA~500μA 范围内调节,故R S 可在190k Ω~3.8 k Ω范围内调节。
一般R S 在10k Ω左右取用。
在这里,我们取V CC =12V ,R x =51 k Ω,这也保证了○7脚电平约等于10V 。
i t t S
L
o f C R R R 09.2V =
取 R S =13 k Ω,则 V o =f i ×10 –4V
620
0.01
10k 10k
【原理图】
【完成情况】
一.搜集资料(第三、四周)
我们小组的每个成员都去搜集了关于实现电路要求所需要的元器件的结构和工作原理以及其如何接线等各方面资料。
经过大家讨论后,大致确定实现电路效果的主要工作原理:将电路分成两部分,一部分利用霍尔元件脉冲转化成频率的功能输出频率信号,另一部分将刚才所得的频率信号经过LM331变成直流电压,从而表示车轮的转速。
二.画出工作电路图(第五周)
经过反复的讨论与分析,确定了初步的工作原理图后,通过Multisim软件绘制电路图,中期报告电路原理设计图如下:
三.中期报告的撰写(第五、六周)
将前期搜集的资料进行汇总、梳理元器件工作原理等,撰写出中期报告。
四.电路板的焊接(第七、八周)
由正在上工程教育初级的组员作为主要焊接成员,另外已上过的组员在一边进行器材加工和理论计算等工作,共同完成了整个电路板的焊接。
五.电路板的调试和修改(第七、八周)
在电路板的焊接完成第一部分后,我们开始对电路板进行调试。
测试发现我们焊接好的电路无法实现设计效果,我们进行了很多天的调试,结果发现了以下问题:
问题一:无论怎么调试,电路始终不能将频率转化成电压。
一开始,我们采用了中期报告的电路图,发现上述问题。
后来,我们经过讨论和测量元器件,发现原来我们最初设计的电路功能是将电压转化成频率。
对策:
于是,我们重新到网上查阅了资料,然后又重新设计了一遍电路图,将LM331的连线转换了一下,同时考虑到输出电压值的调节,我们又添加了一个电位器。
620
0.01
10k
20k
结果:
这样,我们重新焊了电路板,电压信号就出来了,并且通过调节电位器,我们可以调节频率转化输出的电压值,使之更容易被看出所具有的线性关系。
问题二:加上霍尔元件后,无论怎么调试,都没有电压信号输出。
一开始,我们采用了中期报告的电路图,发现上述问题。
后来,我们经过讨论和测量元器件,发现仅仅焊接上霍尔元件并不能使其起作用。
对策:
于是,我们对电路进行了一定的改进,由于霍尔元件输出端出于截止状态而需要输出高电平,于是我们在输出端接上一个连接到电源正极的上拉电阻,以实现输出高电平的目的。
结果:
这样,我们重新焊了电路板,电压信号就出来了,并且由于我们焊接的上拉电阻较大,电路的灵敏度较好,使得我们用小磁铁在霍尔元件处输入的脉冲可以很快转化成电压输出。
六.终期报告的撰写(第八、九周)
经过了将近六周时间的努力,我们终于完成了项目的制作。
我们整合了搜集的资料以及实际的完成过程,撰写了此份报告。
【实验结果及分析】
通过连接实验原理图中的电路我们再调节电位计,就能轻易地调控频率转化输出的电压值,然后我们又加上了12 V 的直流电压,使得每增加占空比为95%脉冲波的频率10HZ所得到的电压值可以多转化0.0010V 。
脉冲波频率所测得的电压
10HZ 0.0012V
20HZ 0.0021V
30HZ 0.0032V
40HZ 0.0041V
实际电位器阻值为4.252kΩ,与计算出的阻值3kΩ有一定的实验偏差,可能是由于电路接线的电阻和元器件的误差造成。
当我们转动圆盘时,可以发现当转速越快时,电压越大。