基于SolidWorks六自由度焊接机械手三维运动模拟
基于SolidWorks下cosmosmotion六自由度焊接机器人三维运动模拟

基于SolidWorks下cosmosmotion六自由度焊接机器人
三维运动模拟
侯祥明;张立祥
【期刊名称】《煤矿机械》
【年(卷),期】2007(28)9
【摘要】以六自由度机器人三维运动仿真为背景,介绍了利用SolidWorks下cosmosmotion实现机械手运动模拟的有效实体方法,重点分析了六自由度机器人的三维建模和建模后运动轨迹规划的实现。
对于一般的机械运动模拟系统,该实例具有一般普遍性。
【总页数】3页(P95-97)
【关键词】SolidWorks;cosmosmotion;三维运动模拟:轨迹规划
【作者】侯祥明;张立祥
【作者单位】安徽理工大学
【正文语种】中文
【中图分类】TP39
【相关文献】
1.基于ADAMS的六自由度焊接机器人运动学分析及仿真 [J], 余晓流;刘进福;汪丽芳;王伟;王殿君;孙丹
2.MATLAB环境下六自由度焊接机器人运动学逆解及优化 [J], 王战中;杨长建;刘超颖;赵赛;杜启鑫;熊蒙
3.基于虚拟样机的六自由度弧焊接串联机器人的运动仿真 [J], 曲令晋;王兴举;刘伟
4.基于MATLAB的六自由度焊接机器人的运动学仿真与轨迹规划 [J], 邢红辉;王保升;洪磊;左健民;石朗春
5.基于SolidWorks和ANSYS Workbench的六自由度焊接机器人的建模与优化设计 [J], 袁安富;陈成
因版权原因,仅展示原文概要,查看原文内容请购买。
基于SolidWorks六自由度焊接机械手三维运动模拟PPT答辩稿

致 谢
感谢指导老师在此设计过程中给予
了热情诚恳的帮助和各位老师的精 心指导,限于水平有限,有遗漏和 错误之处希望各位老师批评指证
1.6焊接机械手的工作原理
固定机座后通过机身上转台的旋转和大小 手臂的运动带动旋转手腕的转动和摆动手 腕的运动,在给手抓一个配合尺寸使之能 够自由的伸缩以便夹取工件。
1.7 焊接机械手的构成和设计
焊接机械手的零部件包括:机座、机座盖板、 机身、转台、大臂、小臂、旋转手腕、摆 动手腕、手抓、销钉、螺栓、螺母等 。
SolidWorks数字化模型 →模型导入→添加复 杂约束力→仿真分析→模型优化。
六自由度机械手的运动情况给出各个转动 副的旋转角度
2.1 模拟加载与仿真
启动SolidWorks软件,如下图选择“装配图” 选项,单击“确定”按钮,建立装配体操 作界面。
2.2机构的装配过程
选择左下方“浏览”按钮如图,打开零件存放的目录,选择第一 个零件系统将默认为固定的零件,以后添加的零件依次为基准。 先选择名称为转台的零件,单击“打开”。单击界面任何位置零 件固定在界面中。在工具栏中选择“插入零部件”,如前操作打 开文件夹,继续选择零件大臂。为了不至于零件过多装配过程复 杂,采取逐个添加约束的方法,进行逐个配合并完成定位。继续 添加零件和配合的操作直到完成装配体。装配过程中合理的选择 配合关系以方便以后的运动仿真操作。如下图
基于SolidWorks六自由度 焊接机械手三维运动模拟
学生姓名:马俊 专业:机械设计制造及其自动化 指导教师:刘天祥
本课题的主要研究内容
(1)查阅机器人技术相关文章和机构,了 解国内外焊接机器人的应用和发展。 (2)画出六自由度焊接机械手部装配图。 (3)应用solidworks对机械手部分进行三维 运动。 (4)用COSMOSMotion软件对其进行仿真。
基于Solidworks的机械手运动仿真设计

基于Solidworks的机械手运动仿真设计0引言机械手对实现工业生产自动化,推动工业生产的进一步发展起着重要作用。
工业机械手可以代替人手的繁重劳动,显著减轻工人的劳动强度,改善劳动条件,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门,更能提高劳动生产率和自动化水平。
随着现代生产的机械化和自动化的发展对机器人的需求越来越大因而对机器人的末端执行机构机械手的研究尤为重要。
一些软件的发展为机械手的设计分析提供了方便降低了生产成本,本设计是基于Solidworks软件,使得设计效率大大提高[1]。
本文是为普通车床配套而设计的上料机械手。
它是一种模仿人体上肢的部分功能,按照预定要求输送工件或握持工具进行操作的自动化技术设备,对实现工业生产自动化,推动工业生产的进一步发展起着重要作用。
1机械手工作原理上料机械手直接与工件接触的部件,它能执行人手的抓握功能。
手抓取物体以物体为中心,用两根手指包络物体。
根据抓取物体时的相对状态,靠手指与工件之间的摩擦力来夹持工件。
本上料机械手采用二指平动手爪,属于夹持式手爪,手指由四杆机构带动,当上料机械手手爪夹紧和松开物体时,手指姿态不变,作平动。
机械手手爪的结构见图1,①为支架、②气动杆、③和④为大螺钉、⑤和⑥为三孔连杆、⑦为小螺钉、⑧短连杆、⑨和⑩为手指。
通过气动杆②来传动力的,气缸带动气动杆②使之向上移动时,其它的杆件共同运动,此时手爪是处于握紧工件的过程;反之,当气缸带动气动杆②向下移动时, 手爪是处于张开的过程。
这样,用气缸带动连杆②做往复平动,从而使其它杆件运动,带动手爪张合,手指上的任意一点的运动轨迹为一弧摆动。
图1机械手装配简图2基于Solidworks机械手仿真动画设计2.1Solidworks介绍SolidWorks是一款功能强大的中高端CAD软件,方便快捷是其最大特色。
它有全面的零件实体建模、生成工作机构的分解动画制作和高级动画制作等功能该软件以参数化特征造型为基础,具有功能强大、易学、易用等特点,是当前最优秀的中档三维CAD软件之一。
基于PROE六自由度机械手参数化建模及运动仿真概论

基于PROE六自由度机械手参数化建模及运动仿真概论基于PRO/E(Pro/ENGINEER)六自由度机械手参数化建模及运动仿真(Introduction to Parametric Modeling and Motion Simulation of a Six Degree-of-Freedom Robot Arm Based on PRO/E)是一种基于 Pro/E 软件的机械手参数化建模方法和运动仿真技术的概念介绍。
机械手是一种能够执行预定动作的自动机器人系统,在工业领域被广泛应用。
参数化建模和运动仿真是机械手设计与验证的重要工具,可以提高设计效率和减少实验成本。
首先,本文介绍了 Pro/E 软件的基本原理和特点。
Pro/E 是一种三维 CAD(计算机辅助设计)软件,具有强大的参数化建模和运动仿真能力。
它可以通过调整参数来改变模型的形状和尺寸,以便满足不同的设计要求。
Pro/E 还提供了强大的运动仿真功能,可以模拟机械手在不同工况下的运动特性。
接下来,本文详细介绍了机械手的六个自由度,即机械手可以在三维空间中进行平移和转动的六个方向。
机械手的自由度决定了它的灵活性和工作范围。
参数化建模是在 Pro/E 软件中定义机械手的结构和参数,以便能够根据实际需求对机械手进行定制化设计。
然后,本文提出了一种基于 Pro/E 软件的机械手参数化建模方法。
通过定义机械手的几何尺寸、关节角度和连杆长度等参数,可以实现对机械手结构和工作范围的快速调整。
参数化建模可以大大加快机械手的设计过程,减少人工调整的工作量。
最后,本文介绍了基于 Pro/E 软件的机械手运动仿真技术。
通过给定关节的运动规律和工作环境的约束条件,可以模拟机械手在不同运动状态下的姿态和运动轨迹。
运动仿真可以帮助设计师评估机械手的性能和可靠性,并进行优化设计。
总结起来,基于 Pro/E 的六自由度机械手参数化建模和运动仿真技术是一种高效、准确和可靠的机械手设计方法。
六自由度机械手三维运动仿真研究
图 C; 运动学多解示意图 Nhomakorabea在实际应用中, 应根据机器人实际结构选取其中最优的一 组解 ( 如行程最短、 功率最省、 受力最好、 回避障碍) , 建立对反 解值进行划分的规范。在仿真系统算法中, 为使机器人在最短 时间完成任务, 采取了行程最短的方案, 即对各转动关节根据 其单位转角对机器人位姿的影响设定其权值, 然后据此对各反 "> ! ; 运动学方程的建立及正解 首先计算各个连杆坐标系的变换矩阵, 变换矩阵中包括了 机械手连杆结构尺寸参数。将连杆坐标系{$} 相对于{$ ? 9 } 的 变换 $$ ? 9 # 称为连杆变换。每一个连杆变换 $$ ? 9 # 是经由以下四 个子变换得到的: !绕 % $ ? 9 旋转 ! 角; " 绕 & $ ? 9 旋转 " 角; #绕 ’ $ ? 9 旋转 # 角; 下 的 点: $ 将 坐 标 系 原 点 移 到 坐 标{$ ? 9 }
( $@ A ( %, &, ’) 。其中三次旋转是相对于固定坐标系{$ ? 9 } ,
B
得到相应的旋转矩阵 $$ ? 9 ! %&’ 与 $ ? 9 " $@ , 从而可以得到从坐标系
[C] {$ ? 9 } 到坐标系{$} 的齐次变换 $$ ? 9 # 。在本文介绍的机械手
中, 六个关节均为转动关节, 对于转动关节 $, 连杆变换 $$ ? 9 # 是 关节转动角度 $ $ 的函数。根据连杆变换的齐次矩阵式和连杆
第) 期
陈幼平等: 六自由度机械手三维运动仿真研究
- "# -・ ・!
六自由度机械手三维运动仿真研究 !
陈幼平,马志艳,袁楚明,周祖德
( 华中科技大学 机械科学与工程学院,湖北 武汉 ’%"",’ ) 摘- 要:以六自由度机械手三维运动仿真为背景, 介绍了利用 ./0123 实现机械手运动仿真的有效方法, 重点分析 了机械手运动学模型的构建以及运动轨迹规划的实现。对于一般的机械手运动仿真系统, 该实例具有一般普遍性。 关键词: ./0123;机械手;三维运动仿真;轨迹规划 中图法分类号:45!’!- - - 文献标识码:*- - - 文章编号:&""&$ %)6# ( !"") ) ")$ "!"#$ "%
利用SOLIDWORKS实现焊接机器人设计和仿真

2014年第12期47焊接机器人是从事焊接(包括切割与喷涂)的工业机器人。
根据国际标准化组织(ISO)工业机器人术语标准焊接机器人的定义,工业机器人是一种多用途的、可重复编程的自动控制操作机(Manipulator),具有三个或更多可编程的轴,具有生产效率高且产品品质稳定,劳动力成本低廉,操作环境好等优点,主要用于工业自动化领域。
随着社会的发展,我国已经出现了人口老龄化,劳动力成本不断上升。
随着国内外机械行业竞争的不断加剧,对产品的质量要求更严格,焊接方式也急需由传统的手工焊接逐渐由传统的人工焊接转变向机器人焊接。
国外厂商如FANUC、OTC、ABB和KUKA等对焊接机器人的研究较早,已经形成了系列化产品并投放占领大部分的国内外市场份额。
国内在近几年才开始进行机器人技术的研究,起步较晚,机器人的性能和技术都和国外厂商有一定的差距。
因此,国内市场也需要在借鉴国外同类型焊接机器人优点的基础上,立足于现有的加工制造业水平,从解决实际问题的角度出发,研究开发出满足中小企业实际需要的经济型可靠型焊接机器人。
SOLIDWORKS2014是由美国SOLIDWORKS公司研究开发的基于造型的三维机械设计软件,其特点是易学易用,在企业内部推广成本低,SOLIDWORKS Motion是嵌在SOLIDWORKS中的运动仿真模块,依托其强大的运动分析功能,能比较精确地对焊接机器人进行工件运动位置及运动参数的计算,并以动画的形式计算出虚拟现实的动画演示,能很直观地解决六自由度焊接机器人的运动规律问题。
通过建立虚拟仿真环境进行机器人的仿真实验研究,可以大幅度降低实验成本,提高实验效率,在运动状态下进行运动仿真,能有效地检查机器人本体结构设计的合理性等,对实际样机的设计具有重要的参考和指导价值。
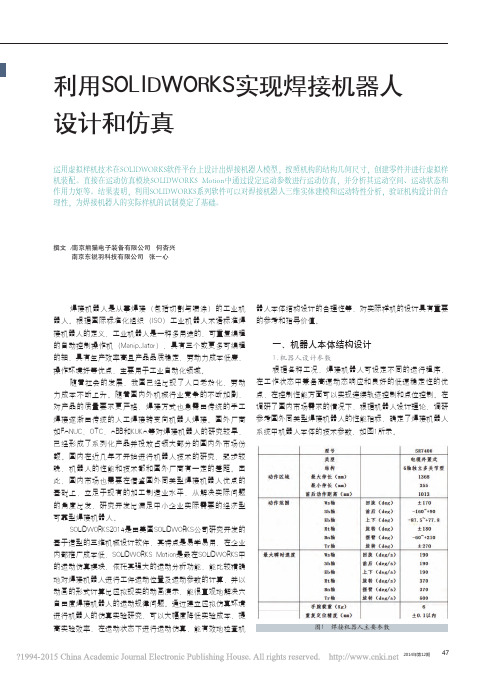
一、机器人本体结构设计1.机器人设计参数根据各种工况,焊接机器人可设定不同的运行程序,在工作状态中兼备高速动态响应和良好的低速稳定性的优点,在控制性能方面可以实现连续轨迹控制和点位控制。
基于Solidworks的机械手三维建模及其运动仿真

5 结语
责任编辑:于淑清 收稿日期:2010-04-14
215
第 31 卷第 10 期
基于 Solidworks 的机械手三维建模及其运动仿真— ——夏学文,等
Vol.31No.10
1.1 机械手零部件的三维建模
的零部件会自动定义为固定静止的部件,然后依次
Solidworks 零部件的建模过程为: 首先选取合 插入 各 零 部 件 ,通 过 一 系 列 的 配 合 约 束 关 系 ,装 配
[5]吴序堂. 齿轮啮合原理[M]. 西安:西安交通大学出版社,2009. [6]刘鹄然,赵东福,宋德玉. 现代啮合理论[M]. 杭州:浙江大学出版
社 ,2008. 作 者 简 介 : 耿 金 萍 (1984- ),女 ,江 苏 徐 州 人 ,中 国 矿 业 大 学 机
电 学 院 ,研 究 生 ,机 械 制 造 及 其 自 动 化 专 业 ,电 话 :0516-83590278 , 电 子 信 箱 :gengjinping188@.
注意的问题。 有些零部件特征相当的复杂,例如铲 零部件”命令,依次如图 1 所示,排列各零部件,顺
臂爪臂的建模。 因为它的主体特征是一个比较复杂 序按照从上到下排列。 注意插入的零部件应该集中
的曲面,所以需要熟练曲面建模的命令。 曲面建模 在一个区域,不要过于分散,以便于下一步装配步
通过带 控 制 线 的 扫 描 曲 面 、放 样 曲 面 、边 界 曲 面 以 骤 。 (3)装 配 时 ,将 所 有 的 零 部 件 通 过 “重 合 ”、“平
1.2 机械手的装配 Solidworks 提供了强大的装配功能,其优点为:
(1)在 装 配 体 环 境 下 ,可 以 方 便 地 设 计 及 修 改 零 部
基于Solidworks的机械手爪运动仿真及有限元分析

基于Solidworks的机械手爪运动仿真及有限元分析作者:陆鹏石钢周志浩程道来李南坤来源:《中国科技纵横》2014年第11期【摘要】以巴玛克公司自动化钎焊机械手爪为对象,利用SolidWorks开展机械手爪结构设计,三维建模,然后运用插件中motion、simulation对它进行运动仿真分析和有限元分析。
最后得到机械手的运动轨迹,作业空间情况,为公司机械手爪后续的优化设计研究提供依据。
【关键词】 SolidWorks 机械手爪三维建模运动仿真【Abstract】 It will useSolidWorks to design structureof Manipulator and to establish theThree-dimensional Modeling based on automated welding robot of Shanghai Bamac Electric Technology Co., Ltd.,then by using the plug of simulation and motion of SolidWorks,it will focus on the Motion Simulation and Finite ElementAnalysis of the Manipulator.Finally the trajectory and the work space of the Manipulate can be received,and provide a basis of manipulator analysis in order to optimize the manipulator for the company.【Key words】 SolidWorks Manipulator Three-dimensional Modeling Motion Simulation机器人手爪是机器人可以实现类似人手的功能部件,用来夹持工件或工具,是一个很重要的执行机构。
基于Solidworks创建的机械手的SimMechanics仿真
现代制造技术与装备2016年11月-正文-20161205.indd 61
2016/12/19 10:3动过程
现代制造技术与装备
2016 第 11 期 总第 240 期
入 SimMechanics,进行仿真优化。
旋转角速度 W23(deg/s) 旋转角速度 W22(deg/s) 旋转角速度 W21(deg/s) 旋转角速度 W13(deg/s) 旋转角速度 W12(deg/s) 旋转角度 θ12(deg) 手指 1 中指节运动曲线 50 0 -50 0 1 2 3 4 5 6 7 8 9 10 时间 T(s) 手指 1 远指节运动曲线 20 0 -20 旋转角加速度 2 2 2 2 旋转角加速度 α21(deg/s ) 旋转角加速度 α13(deg/s ) 旋转角加速度 α12(deg/s ) α23(deg/s2) 旋转角加速度 α22(deg/s ) 200 150 100 50 0 1 2 3 4 5 6 7 8 9 10 时间 T(s) 1 0 ×104
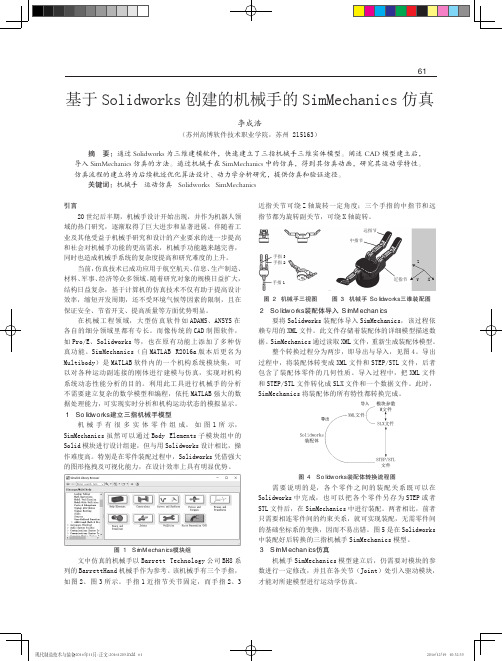
图 6 展示了机械手的整个运动过程。初始状态时,机械 手三指摊开;在 0 ~ 3s 内,手指 2 和 3 绕着各自的近指节 关节旋转 180°,至三指并拢,如图6(c)所示;3 ~ 6s, 三手指同时向掌心弯曲, 做抓取状 ; 6 ~ 10s, 三手指重新张开。
-1 -2 0 1 2 3 4 5 6 7 8 9 10 时间 T(s) ×104
图 4 Solidworks 装配体转换流程图 图 2 机械手三视图 图 3 机械手 Solidworks 三维装配图
手指 1 近指节 Y X 手指 3 手指 2 Z 中指节
近指关节可绕 Z 轴旋转一定角度;三个手指的中指节和远 指节都为旋转副关节,可绕 X 轴旋转。
工业机器人三维建模(Solidworks) 课件 第7章 工业机器人运动仿真

7.1.7 基础仿真动画设计
(5)在运动算例设计树中,右击“摆动体”,然后在弹出的快捷菜单中选择【隐藏】命令。 更改栏随时间线出现,如下图所示。
(6)单击【MotionManager】工具栏上的【播放】按钮 即可播放动画,“摆动体”因逐渐隐 藏而产生逐渐消失的效果。
7.1.7 基础仿真动画设计
(7)右击运动算例设计树中“摆动体”行对应时间线【0秒】处的键码点,在弹出的快捷菜 单中选择【复制】命令;将时间栏拖动到【4秒】处,在“摆动体”行右击,在弹出的快捷菜单中 选择【粘贴】命令,更改栏随时间线出现,如下图所示。
7.1.7 基础仿真动画设计
7.1.8 视图定向动画
观阅键码是模型在某一时间点处的视图。观阅键码出现在【视向及相机视图】键码画面 中。【视向及相机视图】可以在动画过程中旋转、缩放或平移整个动画。
右击运动算例设计树中【视向及相机视图】,系统弹出如下图所示的快捷菜单,可以设 定以下选项:
选取【禁用观阅键码生成】:出现 图标,在播放过程中或在编辑动画时防止模型视图 更改。即在播放过程中,当使用缩放或旋转将模型重新定向时,这些更改不会保存在动画中。 选取此选项也禁止观阅键码生成。
7.1.7 基础仿真动画设计
在SOLIDWORKS中,可以在动画的任意点把视象的属性用动画显示。可以控制动画中单个或多个零部 件的显示,并在相同或不同的装配体零部件中组合不同的显示选项。 动画视象属性的步骤如下:
(1)右击运动算例设计树的【视向及相机视图】,系统弹出如左图所示的快捷菜单。取消选择【禁 用观阅键码播放】和【禁用观阅键码生成】,这样可以使用前导视图工具栏上的旋转和平移等工具操作 模型,而不将模型方向变化作为动画的一部分。
COSMOS Motion用于模拟和分析,并输出模拟单元(力、弹簧、阻 尼、摩擦等)在装配体上的效应,它是更高一级的模拟,包含所有在物 理模拟中可用的工具。
利用SOLIDWORKS实现焊接机器人设计和仿真_何杏兴
2014年第12期47焊接机器人是从事焊接(包括切割与喷涂)的工业机器人。
根据国际标准化组织(ISO)工业机器人术语标准焊接机器人的定义,工业机器人是一种多用途的、可重复编程的自动控制操作机(Manipulator),具有三个或更多可编程的轴,具有生产效率高且产品品质稳定,劳动力成本低廉,操作环境好等优点,主要用于工业自动化领域。
随着社会的发展,我国已经出现了人口老龄化,劳动力成本不断上升。
随着国内外机械行业竞争的不断加剧,对产品的质量要求更严格,焊接方式也急需由传统的手工焊接逐渐由传统的人工焊接转变向机器人焊接。
国外厂商如FANUC、OTC、ABB和KUKA等对焊接机器人的研究较早,已经形成了系列化产品并投放占领大部分的国内外市场份额。
国内在近几年才开始进行机器人技术的研究,起步较晚,机器人的性能和技术都和国外厂商有一定的差距。
因此,国内市场也需要在借鉴国外同类型焊接机器人优点的基础上,立足于现有的加工制造业水平,从解决实际问题的角度出发,研究开发出满足中小企业实际需要的经济型可靠型焊接机器人。
SOLIDWORKS2014是由美国SOLIDWORKS公司研究开发的基于造型的三维机械设计软件,其特点是易学易用,在企业内部推广成本低,SOLIDWORKS Motion是嵌在SOLIDWORKS中的运动仿真模块,依托其强大的运动分析功能,能比较精确地对焊接机器人进行工件运动位置及运动参数的计算,并以动画的形式计算出虚拟现实的动画演示,能很直观地解决六自由度焊接机器人的运动规律问题。
通过建立虚拟仿真环境进行机器人的仿真实验研究,可以大幅度降低实验成本,提高实验效率,在运动状态下进行运动仿真,能有效地检查机器人本体结构设计的合理性等,对实际样机的设计具有重要的参考和指导价值。
一、机器人本体结构设计1.机器人设计参数根据各种工况,焊接机器人可设定不同的运行程序,在工作状态中兼备高速动态响应和良好的低速稳定性的优点,在控制性能方面可以实现连续轨迹控制和点位控制。
六自由度机器手运动仿真说明书
六自由度机器手运动仿真摘要机器人是当今工业的重要组成部分,它能够精确地执行各种各样地任务和操作,并且无需人们工作时所需的安全措施和舒适的工作条件。
机械手臂是目前在机械人技术领域中得到最广泛实际应用的自动化机械装置,在工业制造、医学治疗、娱乐服务、军事以与太空探索等领域都能见到它的身影。
本文主要任务是对该机器人的结构进行分析研究并且对其进行运动仿真,同时要求设计者对三维建模软件的应用有较高的要求,运用UG4.0三维建模软件建立串联六自由度机器手机械结构模型,并导入到UG6.0对其进行运动仿真,通过对其进行运动仿真,得出相应工作围。
关键词:传动部件;建模;仿真;AbstractNow the robot is an important part of the industry, it can carry out various tasks and operations precisely without the security measure and the comfortable working condition which people need. It is the automated machinery which is the most widely practical applied in the field of the robot technology, and it can be seen in many areas such as the industrial manufacturing, medical treatment, entertainment, military and space exploration and so on.This main task is the analysis of the structure of the robot and its simulation exercise, Also asked the designer of the 3D modeling software application for a higher,using three-dimensional modeling software to establish the series UG4.0 six degrees of freedom robot mechanical structure model, importing into UG6.0 for motion simulation, and corresponding results are obtained by analyzing comparison.Keywords: transmission parts; modeling; simulation;目录Abstract1引言11机器手的概述12 UG三维建模软件的介绍33 题目的意义与目的4第一章建立六自由度机器手三维模型51.1串联六自由度机器手结构说明51.2 安装尺寸71.3 外形尺寸和最大动作围81.4各关节部位电动机的选定91.5 UG4.0实体建模121.5.1分析机器手结构121.5.2 UG4.0建立六自由度机器手模型零件。
基于SW的六自由度平台仿真

基于SW的六自由度平台仿真基于SolidWorks的六自由度液压平台运动仿真0前言虚拟样机技术是建造物理样机前对设计对象在计算机上建立的虚拟模型机,利用其完成设计对象功能的可行性及其工作性能的分析,更好地理解系统的运动特性、动力特性,比较设计方案,优化设计,提高产品质量和机械设计效率等。
仿真模型的建立和模拟现实条件是虚拟样机的重要基础。
笔者设计的六自由度液压平台因其自由度较多,正过程的运动仿真比较困难,进行运动逆过程的仿真,即给定末部执行器的运动轨迹或运动参数,来研究各驱动液压缸的运动参数和特性,包括平台的建模、仿真运动过程、极限位置、最大运动量、干涉等。
1 液压平台的基本结构设计液压六自由度运动平台本体结构包括上、下平台,变长杆系统,链接上、下平台和变长杆的铰接元件,力传感元件,位移传感元件等,如图1所示。
下平台为固定平台,上平台是可动平台,采用6根变长杆机构驱动。
6根变长支杆采用铰接在上、下平台之间的液压缸进行运动驱动。
从模仿人肌肉的角度出发,为体现机构、检测一体化的思想,将力传感器分别集成在液压平台的2个平台间的6个液压缸的缸杆上,用6个一维拉、压传感器检测1个六维力。
位移检测元件位移传感器选用FX.11型直流差动变压器式位移传感器。
它把振荡器、相敏解调器与差动变压器封装在一起,只需提供稳定的直流电源,就能获得与位移量成线性关系的直流电压输出。
铰接元件,采用万向节铰接设计。
这样,在支路上,上、下万向节各有2个转动的自由度,液压缸伸缩有1个移动自由度,缺少的1个转动自由度由液压缸和液压活塞杆的相对转动实现。
按照上面的设计原则,采用的结构尺寸:上、下铰接元件的分布圆半径分别为上平台半径ra=300mm,下平台半径rb=600mm,液压缸行程为60mm,上、下平台的初始位置高度为h=1.5ra的负二次方,上、下铰接点之间的距离和上平台端铰接元件的分布圆之间的关系满足:l*l=4.5r*r另外,为了保证铰接元件运动副运动空间的充分利用,采用支座设计使铰接元件在液压缸的中间工作位置时处在原始状态(即铰接元件的轴线重合状态)。
基于SolidWorks的六自由度液压平台运动仿真
运动轨迹或运动参数 , 来研究各驱动液压缸的运动参 数和特性 , 包括平台的建模 、仿真运动过程 、极限位 置 、最大运动量 、干涉等 。
1 液压平台的基本结构设计
液压六自由度运
动平台本体结构包括
上 、下 平 台 , 变 长 杆 系 统 , 链 接 上 、下 平 台和变长杆的铰接元
件, 力传感元件, 位 移传感元件等 , 如图 1
的螺纹 , 根据装配关系会转化成转动副 , 实际机构中
是不运动 的 , 即 转化
的运 动 副 多 数 不 符 合
要求 , 因而 仿真 前不 必改变装 配关 系 , 直
接在 分 析 模 块 中 将 转 化的运动 副去 掉 , 再 根据需要重新定义 。
图 6 液压缸运动副和 运动驱动的定义
( 1) 运动副的定义
计 、机械创新等的教学与研究工作 。电话 : 0431 - 85711302, E - mail: ZZX - CC@1631com。
·128·
机床与液压
第 36卷
缸行程为 60mm, 上 、下平台的初始位置高度为 h =
115 ra , 上 、下铰接点之间的距离和上平台端铰接 元件的分布圆之间的关系满足 : l2 = 415 r2a。另外 , 为 了保证铰接元件运动副运动空间的充分利用 , 采用支 座设计使铰接元件在液压缸的中间工作位置时处在原 始状态 (即铰接元件的轴线重合状态 ) 。 2 虚拟样机的建立与仿真
SW 是美国 SolidWorks公司生产的完全基于 NT / W indows平台的集三维机械设计 ( CAD ) 、机构运动 仿真分析和结构有限元分析 ( CAE) 、计算机辅助制 造 ( CAM ) 、大型企业管理 ( PDM ) 等各种功能为一 体的软件 。利用 SW 对六自由度液压平台进行建模和 运动分析 , 必须以三维实体为基础 , 合理选择运动副 和定义连杆的运动驱动 , 从而实现六自由度液压平台 的正确运动仿真 。同其它方法相比 , 该方法可以很容 易解决看起来很复杂的机构系统仿真问题 。依托 SW 强大的运动分析功能 , 能精确地对研究对象进行空间 运动位置及运动参数的计算 , 并可以得出漂亮的虚拟 现实的动画演示 , 能够很好地解决复杂机构的运动规 律问题 。通过建立虚拟仿真环境进行仿真试验研究 , 可以降低实验成本 , 提高实验效率 。并且能够对运动 状态进行仿真 , 检查机构设计的合理性等 , 对实际样 机的设计具有重要的参考和指导价值 。
基于SolidWorks Motion的六自由度平台运动仿真

矢 量 ,即可 求 出杆长 。
由静 坐标 系 向动 坐标 系变换 的矩 阵 为 :
co cosy sinasinf lcosy—cosczsinT costxsinf lcosT+sinasinT 0
co sinT simxsin/3sinT+cosotcosT cosotsinf lsinT—-sinacosT Yo
承 载负 载 ;2)驱 动 杆 ,共 6根 ,可 以 由 电动 缸 或 液 压缸 驱动 ;3)下平 台 ,为机 构 的底 座 ;4)铰 链 ,可 以 是球 铰或 虎 克铰 ,位 于 驱 动杆 两 端 ,用 于 固定 连 接 上下 平 台 。六 自由度平 台通 过 6根 驱 动杆 的伸 缩 来实 现横 移 、纵移 、升 降 、横 滚 、俯 仰 、偏航 6个 自由 度 的运 动 以及 它们 的组 合运 动 。 1.2 平 台坐标 系的建 立及位 置反 解 ¨
(1.江 苏理 工学 院机 械工 程学 院 ,江苏 常 州 213001) (2.江苏 理工 学 院 电气 信息 工程 学 院 ,江 苏 常州 213001)
摘 要 :为 了更 直观 地 了解 六 自由度 平 台的运 动 规律 ,根 据 高等 空 间机 构 学理 论 ,建 立 了六 自由度 平 台位 置 反解数 学模 型 ,利 用 SolidWorks构建 了六 自由度 平 台 的三 维 实体 模 型 ,然后 使 用 Solid— Works Motion模 块对 平 台进 行 了运 动仿 真 ,仿 真 结果验 证 了理 论分析 的 正确性 和机 构设 计 的合 理 性 ,对后 续的轨 迹规 划和 结构 优化 具有 重要 参考 价值 。 关键词 :六 自由度 平 台;SolidWorks Motion;运 动仿 真 中图分 类 号 :TH112 文献标 志码 :A 文章 编 号 :2095—509X(2016)06一oo36—04
毕业设计(论文)关节型机械手设计【三维sw】【六自由度】

XX学院毕业设计说明书(论文)作者: 学号:学院(系):专业:题目: 关节机械手设计2014 年 4 月毕业设计说明书(论文)中文摘要机械手是一种典型的机电一体化产品,关节机械手是机械手研究领域的热点。
研究关节机械手需要结合机械、电子、信息论、人工智能、生物学以及计算机等诸多学科知识,同时其自身的发展也促进了这些学科的发展。
本文对一种使用在关节机械手的结构进行设计,并完成总装配图和零件图的绘制。
要求对机械手模型进行力学分析,估算各关节所需转矩和功率,完成电机和减速器的选型。
其次从电机和减速器的连接和固定出发,设计关节结构,并对机构中的重要连接件进行强度校核。
关键词:结构设计,机器臂,关节型机械手,结构分析毕业设计说明书(论文)外文摘要目录1 绪论 (1)1.1 引言 (4)1.2 关节机械手研究概况 (5)国外研究现状 (5)国内研究现状 (6)1.4 关节机械手的总体结构 (7)1.5 主要内容 (7)2 总体方案设计 (8)2.1 机械手工程概述 (8)2.2 工业机械手总体设计方案论述 (9)2.3 机械手机械传动原理 (10)2.4 机械手总体方案设计 (10)2.5 本章小结 (12)3 机械手大臂部结构 (13)3.1 大臂部结构设计的基本要求 (13)3.2 大臂部结构设计 (14)3.3 大臂电机及减速器选型 (14)3.4 减速器参数的计算 (15)3.5承载能力的计算 (19)柔轮齿面的接触强度的计算 (19)柔轮疲劳强度的计算 (19)4小臂结构设计 (24)4.1 腕部设计 (24)4.2 小臂部结构设计 (37)4.3 小臂电机及减速器选型 (37)传动结构形式的选择 (38)几何参数的计算 (38)4.4 凸轮波发生器及其薄壁轴承的计算 (39)柔轮齿面的接触强度的计算 (40)柔轮疲劳强度的计算 (41)4.5 轴结构尺寸设计 (42)4.6 轴的受力分析及计算 (42)4.7 轴承的寿命校核 (43)5机身设计 (45)5.1 步进电机选择 (45)5.2 齿轮设计与计算 (50)5.3 轴的设计与计算 (57)5.4 轴承的校核 (65)5.5 键的选择和校核 (68)5.6 机身结构的设计 (69)总结与展望 (70)致谢全套设计加197216396或401339828 (71)参考文献 (72)1 绪论1.1 引言机械手是一种典型的机电一体化产品,关节机械手是机械手研究领域的热点。
《2024年六自由度机械臂控制系统设计与运动学仿真》范文

《六自由度机械臂控制系统设计与运动学仿真》篇一一、引言随着现代工业自动化和智能制造的快速发展,六自由度(6DOF)机械臂作为一种重要的自动化设备,在工业生产、航空航天、医疗康复等领域得到了广泛应用。
本文旨在设计一个六自由度机械臂控制系统,并对其运动学进行仿真分析。
二、六自由度机械臂控制系统设计1. 硬件设计六自由度机械臂控制系统硬件主要包括机械臂本体、驱动器、传感器、控制器等部分。
其中,机械臂本体采用模块化设计,由六个旋转关节组成,每个关节均配备有电机驱动器。
传感器用于获取机械臂的位置、速度、加速度等状态信息,控制器则负责根据预设的算法对机械臂进行控制。
2. 软件设计软件设计是六自由度机械臂控制系统的核心部分。
控制系统采用分层结构设计,包括上层控制层和下层执行层。
上层控制层主要负责任务规划、路径规划、姿态控制等任务,下层执行层则负责接收上层控制层的指令,并通过驱动器控制机械臂的运动。
软件设计中,需考虑到实时性、稳定性和可扩展性等因素。
3. 控制系统算法控制系统算法是实现六自由度机械臂精确控制的关键。
常用的算法包括PID控制算法、模糊控制算法、神经网络控制算法等。
本设计中,采用PID控制算法,通过调整比例、积分和微分系数,实现对机械臂的精确控制。
三、运动学仿真分析运动学仿真是对六自由度机械臂控制系统设计的重要环节。
通过建立机械臂的运动学模型,可以分析机械臂的运动特性,为控制系统的设计提供依据。
1. D-H参数法建模采用D-H(Denavit-Hartenberg)参数法建立机械臂的运动学模型。
通过确定各关节的连杆参数,建立连杆之间的相对位置和姿态关系,从而得到机械臂的空间姿态。
2. 正运动学分析正运动学分析是指根据关节角度计算机械臂末端的位置和姿态。
通过求解机械臂的正运动学方程,可以得到机械臂末端在笛卡尔空间中的位置和姿态信息。
3. 逆运动学分析逆运动学分析是指根据机械臂末端的位置和姿态计算关节角度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
国内焊接机器人研究的历史及现状
我国自上世纪70 年代末开始进行工业机器人的研究,经过二十多年的发展,在技术和应用方面均取得了长足的发展,对国民经济尤其是制造业的发展起到了重要的推动作用。据不完全统计,近几年我国工业机器人呈现出快速增长势头,平均年增长率都超过40% , 焊接机器人的增长率超过了60% ;2004年国产工业机器人数量突破1400 台,进口机器人数量超过9000台,其中绝大多数应用于焊接领域;2005 年我国新增机器人数量超过了5000台,但仅占亚洲新增数量的6% ,远小于韩国所占的15% ,更远小于日本所占的69% 。这对于我国的经济发展速度以及经济总量来说显然是不匹配的,这说明我国制造业的自动化程度有待进一步提高,另一方面也反映了我国劳动力成本的低廉,制造业自动化水平以及工业机器人应用程度的提高受到限制。
机器人三维运动仿真技术在机器人的研究与应用中发挥着重要作用。它对于在实际工作中机器人行走路径的生成、工作空间防止碰撞等具有十分重要的现实意义。
本文对机器人的产生发展及前景展望进行分析,主要利用Solidworks对机械手设计并进行了动态仿真,介绍了基于Solidworks设计三维零件的操作方法及运动分析插件cosmosmotion基本功能。 焊接机器人的概述
基于SolidWorks六自由度焊接机械手三维运动模拟答辩稿.ppt
基于SolidWorks六自由度焊接机械手三维运动模拟论文.doc
大臂.DWG
小臂.DWG
手抓.DWG
摆动手腕.DWG
旋转手腕.DWG
机座.DWG
机座盖板.DWG
机身.DWG
装配图.dwg
转台.DWG
摘要
本文以六自由度焊接机械手部的三维运动仿真为背景。介绍了国内外焊接机器人的发展状况并着重分析了六自由度焊接机械手运动原理和三维制图软件SolidWorks的应用,在此软件基础上对手部进行了绘制,运动分析和动画模拟。对于SolidWorks制图软件主要介绍了其产生和发展的历史以及应用前景,具体介绍了零件三维制图的操作方法和运动过程,展示了SolidWorks强大的运动仿真功能。重点分析了六自由度机械手的三维建模和建模后运动轨迹规划的实现
当前焊接机器人的应用迎来了难得的发展机遇。一方面,随着技术的发展,焊接机器人的价格不断下降,性能不断提升;另一方面,劳动力成本不断上升,我国由制造大国向制造强国迈进,需要提升加工手段,提高产品质量和增强企业竞争力,这一切预示着机器人应用及发展前景空间巨大。
焊接机器人应用现状
中国机械工程学会焊接学会和中国焊接协会进行了一次比较全面的焊接机器人在制造业中应用情况调查,结果显示, 到1996年底焊接机器人已得到广泛应用。我国使用焊接机器人进行生产的企业已有几百家, 全国安装的焊接机器人已超过千台套, 主要集中在汽车、摩托车和工程机械个重要行业并且90%以上属于5或6轴关节式机器人。
3.2.3 偏重力矩的计算 15
3.2.4焊接机械手各零部件的设计 16
第4章 三维实体建模 25
4.1 模拟方案的确定 25
4.2 仿真实体的绘制 26
4.3 简单数学模型的建立 26
4.4 模拟加载与仿真 22.2 软件的特点及前景 9
2.3 COSMOSMotion的应用及特点 10
第3章 焊接机械手的设计思想 12
3.1 机械手特性方程式 12
3.2 手臂的设计计算 14
3.2.1 驱动力的计算 14
3.2.2 水平回转时驱动力矩的计算 14
4.4.2 进行运动校核 30
4.4.3 结语 30
总结 31
参考文献 32
致 谢 33
机械手是能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、焊接、电子、轻工和原子能等部门。
基于SolidWorks六自由度焊接机械手三维运动模拟
38页 14000字数+说明书+任务书+开题报告+答辩稿+SolidWork三维图+动画仿真+6张CAD图纸【详情如下】
SolidWork三维图+动画仿真
中期汇报表.doc
任务书.doc
基于SolidWorks六自由度焊接机械手三维运动模拟开题报告.doc
1.1.4 焊接机器人的发展趋势
为保障公司的产品和技术与世界水平同步发展, 新松公司充分利用自身的技术优势和行业地位, 除了开发具有自主知识产权机器人自动化系列产品外。公司还与国际众多知名的机器人自动化企业建立了紧密的商业合作伙伴关系, 紧紧围绕客户需求, 公司把国外先进的机器人自动化技术、产品与自身强大的研发设计能力、先进的技术装备与完善的服务体系进行完美整合, 充分发挥各自的技术和资源优势, 为客户提供完整的技术解决方案和交钥匙工程。保证了公司的产品技术水平始终与世界先进水平同步, 为广大客户提供最大增值服务, 形成了以机器人和先进装备为主体的核心技术, 从而具有较强的综合竞争优势和差异化竞争优势。
焊接机器人是近代自动控制领域中出现的一项新技术,并已成为现代机械制造生产系统中的一个重要组成部分。这种新技术发展很快,逐渐形成一门新兴的学科。
焊接机器人的迅速发展是由于它的积极作用正日益为人们所认识:其一、它能部分地代替人工操作,其二、它能按照生产工艺的要求,遵循一定的程序、时间和位置来完成工件的传送和装卸,其三、它能操作必要的机具进行焊接和装配。从而大大地改善工人的劳动条件,显著地提高劳动生产率,加快实现工业生产机械化和自动化的步伐。因而,受到各先进工业国家的重视,投入大量的人力物力加以研究和应用。尤其在高温、高压、粉尘、嗓音以及带有放射性和污染的场合,应用得更为广泛。在我国,近几年来也有较快的发展,并取得一定的效果,受到机械工业和铁路工业部门的重视。
焊接机器人的发展
国外焊接机器人的发展
焊接机器人是近十年来迅速发展起来的智能机器目前不少焊接机器人不仅具有“ 示教再现” 功能, 而且在实际焊接过程中能自动对准焊缝, 焊接大量不同空间位置的焊缝。焊接机器人工作时, 重复精度高, 焊接质量好, 而兼备装、卸工件和焊接功能, 具有较高的机械化水平和生产效率, 特别适宜在有毒、书强射线和水下等特殊场合作业在国外, 焊接机器人除在焊接汽车车身、底盘、轿壳、车轮和十字头等零部件的生产线上获得广泛应用外, 在高压容器、动力设备、大型压缩气体储罐、汽轮机叶片、水下设施和核反应堆等焊接结构上也日益显示出它的重要作用。近年来, 由于焊接机器人造价迅速降低和功能不断完善,它已成为国际市场上供不应求的“ 热门货”。
近十年来, 日、美、苏、英、法等国都投入了大量的人力、物力从事焊接机器人的开发工作, 其中日本焊接机器人的进展速度尤为惊人。日本从1978年开始研制点焊机器人,1980年研制成功第一个弧焊机器人,1981年日本生产了1500个焊接机器人, 产值达到145亿日元, 由日本工业机器人的第六位跃居为第二位目前有10家工厂具有年产1000多个焊接机器人的能力为日本发展和普及焊接机器人,于1982年成立了全国机器人焊接研究委员会。此外,许多日本大公司, 如大阪变压器公司先后在大阪、东京、名古屋等地设立了焊接机器人培训学校。1984年丰田汽车公司己在其作业线上安排了1300个机器人, 今年又将引进300个昼夜工作的机器人。预计在未来的五年中, 日本焊接机器人的产值将迅速增长。
新松公司以关键技术攻关、自主产品开发、应用工程示范为技术路线, 将各类汽车车身自动冲压线、白车身焊装线、汽车总装线、发动机装配线、工装夹具及输送系统的设计制造焊装线钢结构、管网工程的设计制造焊装线工艺设计、平面布置、机器人选型、机器人用自动焊钳设计与选型、非标机械装备、辅具、控制系统的设计制造与生产工艺调试等方面的先进装备技术成功应用于企业实际生产。开发出了适用性强、系统稳定可靠、操作简便、工艺结构性良好、经济高效的系列装备生产线, 在机器人弧焊、点焊系统总体设计和应用工程的实施上, 积累了丰富的生产线设计与机器人系统集成技术。屹今, 新松公司完成的弧焊、点焊机器人工作站, 各种装焊线等机器人自动化应用工程已超过600多台套,连续多年顺利通过ISO9001国际质量体系认证。解决了国内众多企业生产装备技术难题, 提升了在国际舞台上的抗衡能力, 为中国企业的腾飞乃至民族工业的发展起到了推波助澜的作用。
关键词:SolidWorks ; cosmosmotion ; 三维运动模拟; 动画模拟
Abstract
In this paper, welding robot of six degrees of freedom of hand motion simulation for the three-dimensional background. Welding robot at home and abroad and focus on the development of analysis of the welding robot of six degrees of freedom of hand movement and three-dimensional mapping principle SolidWorks software applications based on this software in the department of drawing opponents, motion analysis and animation simulation. Mapping software for SolidWorks introduces the emergence and development of its history and application specific parts introduced the method of operation of three-dimensional graphics and motion simulation of the operation of plug-ins COSMOSMotion process, demonstrated the powerful movement SolidWorks simulation. Analysis focused on the six degrees of freedom robot arm