六自由度平台样本
并联六自由度运动平台

并联六自由度运动平台1.概述并联六自由度运动平台通过六个驱动缸(伺服缸或电动缸)的协调伸缩来实现平台在空间六个自由度的运动,即平台沿x、y、z向的平移和绕x、y、z轴的旋转运动(包括垂直、水平、横向、俯仰、侧倾和旋转六个自由度的运动),以及这些自由度的复合运动。
并联六自由度运动平台可用于机器人、飞行模拟器、车辆驾驶模拟器、新型加工机床、及卫星、导弹等飞行器、娱乐业的运动模拟(动感电影摇摆台)、多自由度振动摇摆台的精确运动仿真等。
图0-1:六自由度及其坐标系定义图我公司通过自行设计、安装调试,并开发控制软件,同时采用进口关键件对并联六自由度运动平台进行研究开发,目前已完成多套六自由度运动平台应用,典型应用有列车风档液压仿真试验台、F1国际赛车运动仿真台、汽车驾驶模拟器、飞机和飞碟运动模拟器、振动谱试验、海浪模拟试验等。
六自由度运动平台的研制,涉及机械、液压、电气、控制、计算机、传感器,空间运动数学模型、实时信号传输处理、图形显示、动态仿真等一系列高科技领域,是液压及控制技术领域的顶级产品。
2.系统组成2.1液压伺服类典型的液压式并联六自由度运动平台主要由机械系统、液压系统、控制系统硬件和控制系统软件四部分组成。
机械系统主要包括:承载平台、上下连接铰链、固定座。
液压系统主要包括:泵站系统、伺服阀、驱动器、伺服油缸和阀块管路。
控制系统硬件主要包括:实时处理器、伺服控制单元、信号调理单元、监控单元和泵站控制单元。
控制系统软件包括:实时信号处理单元、实时运算单元、伺服控制和特殊要求处理单元。
2.2 电动伺服类电动式并联六自由度运动平台则将伺服油缸用电动缸代替,而伺服阀、泵站系统及阀块管路等则相应取消,增加运动控制单元。
具有系统简洁、响应速度快等优点,是多自由度平台今后重点发展的方向。
3.主要技术参数以下参数为液压类平台典型值,具体可按用户要求设计制造。
3.1平台主要参数平台最大负载:静态≥2000KG,动态≥3000KG。
六自由度运动平台设计方案

六自由度运动平台设计方案1概述YYPT原理样机用原库房留存的345厂的直流电机作为动力源,直流驱动器及工控机作为控制系统元件,采用VB软件进行控制软件的编制,因设计及器件选型的原因,导致YYPT原理样机,在速度、精度、运动规律上等几个技术指标无法满足原规定的指标要求,现在此基础上进行优化方案的设计。
2 原理样机技术状态2.1 原理样机方案2.1.1 组成原理样机采用工控机作为系统的控制单元,工控机内配有研华PCI1716和PCI1723作为A/D和D/A模拟量卡,驱动器采用AMC公司的型号为12A8的伺服驱动器,并配有直流可调电源其输出电流可达到150A,采用KH08XX(3)电动缸作为运动平台的六条支腿,电动缸上安装有电阻尺作为位置反馈器件,上平台与电动缸连接采用球笼联轴器,下平台与电动缸连接采用虎克铰链方式。
具体产品组成表见表2.1。
6 直流电源 12.1.2 结构方案六自由度运动平台是由六条电动缸通过虎克铰链和球笼万向节联轴器将上、下两个平台连接而成,下平台固定在基础上,借助六条电动缸的伸缩运动,完成上平台在三维空间六个自由度(X ,Y ,Z ,α,β,γ)的运动,从而可以模拟出各种空间运动姿态。
图1 六自由度平台外形图a )球笼联轴器(如图2所示)采用球笼铰链与上平面连接。
球笼铰链结构简单、体积小、运转灵活、易于维护。
初选球笼铰链型号BJB (JB/T6139-1992),公称转矩Tn=2000N/m ,工作角度40度,外径D=68mm ,轴孔选用圆柱孔d=24mm ,总长度L1=148mm ,转动惯量为0.00008kg.m ²,重量5kg 。
球笼联轴器电动缸虎克铰链上动平台下静平台图2 球笼联轴器b)虎克铰链(如图3所示)采用虎克铰链与下平面连接。
万向节铰链传动效率高,允许两轴间的角位移大,适用于有大角位移的两轴之间的连接,一般两轴的轴间角最大可达35º~45º,噪音小,对润滑要求不高,传递转矩大,而且使用可靠,因此获得广泛的应用。
六自由度摇摆平台
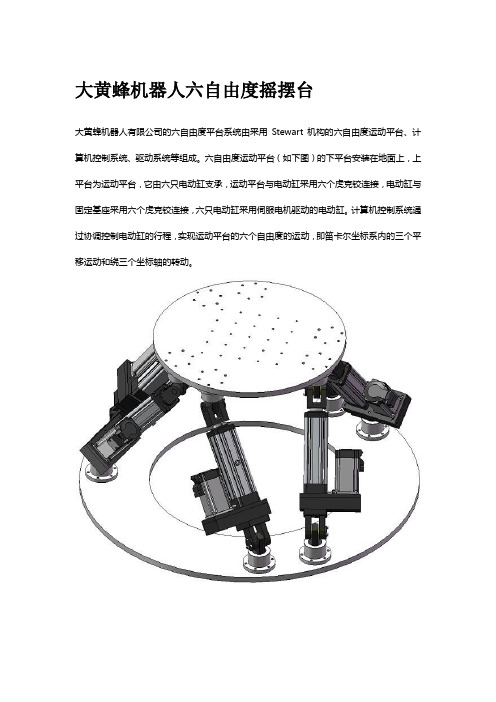
大黄蜂机器人六自由度摇摆台大黄蜂机器人有限公司的六自由度平台系统由采用Stewart机构的六自由度运动平台、计算机控制系统、驱动系统等组成。
六自由度运动平台(如下图)的下平台安装在地面上,上平台为运动平台,它由六只电动缸支承,运动平台与电动缸采用六个虎克铰连接,电动缸与固定基座采用六个虎克铰连接,六只电动缸采用伺服电机驱动的电动缸。
计算机控制系统通过协调控制电动缸的行程,实现运动平台的六个自由度的运动,即笛卡尔坐标系内的三个平移运动和绕三个坐标轴的转动。
各主要部分简述如下:本设备主要由以下部分组成:运动上平台、下平台(基座)、电动缸及伺服电机、驱动器系统、综合控制及监测系统。
各自功能如下:上平台:是有效载荷的安装基面,提供六自由度的摇摆运动。
下平台:是六自由度摇摆台的安装基面,需要承受足够大的冲击力。
电动缸及伺服电机:通过控制电动缸活塞杆的行程,实现运动平台台体的六自由度运动,共6套。
驱动器系统:接收用户控制指令,通过控制伺服电机的输入,对伺服电机的输出转速和转角进行控制,达到控制电动缸活塞杆出速度和行程的目的,共6套。
综合控制监测系统:硬件为用户计算机,软件为研制方配合开发;同时,它还对平台的运动过程进行监测,预防和处理系统的异常情况。
平台总体运动能力指标如上表,具体表述如下:a.平台定位精度及重复定位精度为0.5mm及0.1mm;b.平台转动精度及重复转动精度为0.1°及0.05°;c.行程回差小于0.2mm;d.平台X方向运动速度可从0mm/s到250mm/s连续变化;YZ方向运动速度可从0mm/s到250mm/s连续变化;e.单支杆可承受轴向力不小于700N;f.单支杆的运动速度可从0m/s到250mm/s连续变化;g.平台中位位置固有频率:不小于40Hz;h.机械组件需具有开放性,可拆卸组装;i.机械设计安全系数不小于2.0,驱动裕度不小于3.0;j.额定载荷下,全行程往复工作寿命不小于1×104次,存储寿命不小于48月;k.0HZ~10HZl.1500Wm.平台系统连续运行12h以上,任何一个电动缸的位置漂移不超过0.00025m。
六自由度平台
振动隔离多轴机器人平台G.Satheesh库马尔,永贵斯里尼瓦萨和T. Nagarajan精密工程和机械工程印度理工学院Chennai -600 036电子邮件:human_flag@摘要Stewart平台在多轴振动控制领域的应用证明它在高速和六自由度运动控制方面很有前途。
关键问题是Stewart平台相关高非线性和不确定性的动态。
Stewart平台系统动力学建模开发一个简单的线性模型,固定使用刚体运动的牛顿 - 欧拉方程的立场Stewart平台的议案。
阻尼和刚度矩阵被发现彼此成正比,所以简化成动力学语言。
为应用开发的动态模型的各种控制策略和系统的性能进行了研究,以确定最佳的隔振应用适合的控制策略。
控制策略的建模和测试都是使用MATLAB和实验验证。
简介振动控制关键在于所有指向及定位系统的精度。
振动控制,实现由被动和主动的方式。
而被动的方式是有效地引进无动力配置没有不稳定的风险。
发现主动方式非常适合动态系统,并承诺增加的隔离性能。
在一般情况下,振动控制在高精度应用的要求,可以分为两个层次,隔振[1]在组件级和系统级结构振动抑制。
振动隔离在组件级别将被称为作为本文振动主动控制。
在组件级别的隔离,隔振装置提供的衔接,同时降低之间的振动源及零部件,这需要无振动的振动传输。
其中,Stewart平台在多轴振动控制领域的应用证明它在高速和六自由度(DOF)运动控制方面很有前途,即使在一个比较大的负载[1,2,4,5]。
振动控制中的应用是相当不同的飞行模拟器使用或Stewart平台多自由度并联机械手。
冲击阻尼结构振动所需的驱动器是微米量级的顺序,频率响应性能应达到kHz的范围内。
力振动控制装置所需的能力不同,按要求在不同的应用。
另一方面,Stewart平台机械手有一个关键的缺点,对传统的振动控制装置,及其动力学的高非线性和不确定性。
因此,达斯古普塔等提到的有待解决的问题之一。
[3] 通过广泛的模拟和分析/数值的ODE系统工具操纵的动态行为的研究,是一个简单的控制策略的应用,为隔振中的应用,结合沿。
实验指导书(六自由度)

实验一:6SPT-1六自由度液压伺服平台综合实验一、实验目的:1、掌握电液位置伺服控制系统的基本原理;2、掌握六自由度平台的结构解算的概念及其软件实现;3、掌握VB6.0软件与下位机PAC通过以太网通信的方法;4、掌握6SPT-1六自由度液压伺服平台复现指令信号的实施方法。
二、预备知识:1、熟练掌握PLC的梯形图语言(LD)编程和结构化文本语言(ST)编程;2、熟练掌握VB6.0编程,能使用VB6.0实现以太网通信;3、有一定的矩阵计算能力。
三、试验原理:1、电液位置伺服控制系统的基本原理电液位置伺服控制系统以液体作为动力传输和控制介质,利用电信号进行控制输入和反馈。
只要输入某一规律的输入信号,执行元件就能启动、快速并准确地复现输入量的变化规律。
控制系统结构图如图3.1所示:图3.1电液位置伺服控制系统结构图2、六自由度平台逆解算法图3.2 空间机构位置关系示意图六自由度平台又称为Stewart平台,其结构如图3.2所示,Stewart平台由上、下两个平台、六个驱动关节和连接球铰组成,上平台为运动平台,下平台为基座,上、下平台的六个铰点分别组成一个六边形,连接6个液压缸作为驱动关节,每个液压缸两端各连接一个球铰。
六个驱动关节的伸缩运动是独立的,由液压比例压力阀控制各液压缸作伸缩运动,从而改变各个驱动缸的长度,使动平台在空间的位置和姿态发生变化。
因此该平台是通过六个驱动杆的协调动作来实现三个线性移动及三个转动共六个自由度的运动。
S tewart 平台机构的空间位置关系是指运动平台的六个自由度与六个驱动杆长度的关系,是研究该并联机构最基本的任务,也是机构速度、加速度、误差分析、工作空间分析、动力分析等的基础。
对于6-SPS 平台机构,其特点是动静平台铰点共面,考虑到工作空间的对称性要求,将平台的6个铰点分成3组,三组铰点沿圆周120°均布,动、静平台的相邻两边到中心的夹角分别为30°和90°。
六自由度运动平台设计方案
六自由度运动平台设计方案1概述YYPT原理样机用原库房留存的345厂的直流电机作为动力源,直流驱动器及工控机作为控制系统元件,采用VB软件进行控制软件的编制,因设计及器件选型的原因,导致YYPT原理样机,在速度、精度、运动规律上等几个技术指标无法满足原规定的指标要求,现在此基础上进行优化方案的设计。
2原理样机技术状态2.1原理样机方案2.1.1组成原理样机采用工控机作为系统的控制单元,工控机内配有研华PCI1716和PCI1723作为A/D和D/A模拟量卡,驱动器采用AMC公司的型号为12A8的伺服驱动器,并配有直流可调电源其输出电流可达到150A,采用KH08XX(3)电动缸作为运动平台的六条支腿,电动缸上安装有电阻尺作为位置反馈器件,上平台与电动缸连接采用球笼联轴器,下平台与电动缸连接采用虎克铰链方式。
具体产品组成表见表2.1。
2.1.2结构方案六自由度运动平台是由六条电动缸通过虎克铰链和球笼万向节联轴器将上、下两个平台连接而成,下平台固定在基础上,借助六条电动缸的伸缩运动,完成上平台在三维空间六个自由度(X,丫,Z,a,B, 丫)的运动,从而可以模拟出各种空间运动姿态。
图1六自由度平台外形图a)球笼联轴器(如图2所示)采用球笼铰链与上平面连接。
球笼铰链结构简单、体积小、运转灵活、易于维护。
初选球笼铰链型号BJB (JB/T6139-1992),公称转矩Tn=2000N/m,工作角度40度,外径D=68mm,轴孔选用圆柱孔d=24mm,总长度L1=148mm ,转动惯量为0.00008kg.m2,重量5kg。
图2球笼联轴器b)虎克铰链(如图3所示)采用虎克铰链与下平面连接。
万向节铰链传动效率高,允许两轴间的角位移大,适用于有大角位移的两轴之间的连接,一般两轴的轴间角最大可达35o~45o,噪音小,对润滑要求不高,传递转矩大,而且使用可靠,因此获得广泛的应用。
图3虎克铰链F固定板的连接(如图4所示)F 固定板与电动缸用法兰连接初选深沟球轴承型号61808 (GB/T276-1994),额定载荷 Cr=5.1kN ,外径D=52mm ,轴承孔选用 d=40mm ,宽 B=7mm ,重量 0.26kg 。
六自由度平台实验报告

六⾃由度平台实验报告六⾃由度平台实验报告机械电⼦⼯程系张梦辉21525074⼀、实验简介实验对象为⼀个六⾃由度平台,每个⾃由度的运动均由⼀个永磁式直流电机驱动,实验要求对其中⼀个电动缸进⾏位置控制,位置由⼀个滑变电阻式的位移传感器反馈回的电压信号确定,驱动则是通过研华的PCI1716L的数字输出实现,控制软件采⽤Labview8.6。
⼆、实验装置PC机⼀台研华PCI1716L多功能板卡⼀个PCI总线⼀根固态继电器板⼀块220V AC—24VDC变压器三个直流电动机六个三、实验台介绍六⾃由度运动平台是由六⽀电动缸,上、下各六只万向铰链和上、下两个平台组成,下平台固定在基础上,借助六只电动缸的伸缩运动,完成上平台在空间六个⾃由度(α,β,γ,X,Y,Z)的运动,从⽽可以模拟出各种空间运动姿态。
六⾃由度运动平台涉及到机械、液压、电⽓、控制、计算机、传感器,空间运动数学模型、实时信号传输处理等⼀系列⾼科技领域,因此六⾃由度运动平台是机电控制领域⽔平的标志性象征。
主要包括平台的空间运动机构、空间运动模型、机电控制系统。
本实验台,PC机作为板卡和⼈的接⼝,通过在PC机上编程来控制板卡发送数字信号和采集位置信号。
将PCI多功能卡设置为设备0,选择PCI板卡的模拟信号输⼊⼝AI4⼝来采集2号缸的位置信号,通过PORT1号⼝来控制2号缸对应直流电机的正转、反转和停⽌。
通过数字信号输出⼝发送开关量来控制固态继电器的开和闭,固态继电器导通的话,则接通直流电动机,直流电动机开始运⾏,这时候,电动缸就会朝着指定⽅向运⾏,并且到达指定的位置。
实验中⽤到的接⼝的说明:AI0-AI5 模拟信号输⼊⼝,⽤来采集六个缸的位置信号;AIGND 模拟信号公共地DO0-DO11 数字信号输出⼝,⽤来控制六个缸的运动(其中DO11-DO10 分别控制1号缸的正反转DO09-DO08 分别控制2号缸的正反转DO07-DO06 分别控制3号缸的正反转DO05-DO04 分别控制4号缸的正反转DO03-DO02 分别控制5号缸的正反转DO01-DO00 分别控制6号缸的正反转DGND 数字输出信号公共地PCI1716L板卡端⼝四、实验过程Labview实验程序:1、数字信号输出程序段通过调⽤PCI板卡的例⼦程序:DioWritePortWord.vi程序来发送数字信号,当控制⼦为1时,通过板卡数字信号输出⼝DO8⼝发送1,这样2号缸的电机发转,电动缸退回;当控制字为2时,通过数字信号输出⼝DO9发送1,这样2号缸的电机正转,电动缸前进。
六自由度数学建模
六⾃由度数学建模
(请先阅读《全国⼤学⽣数学建模竞赛论⽂格式规范》)
题⽬机械平台的⾃动控制问题
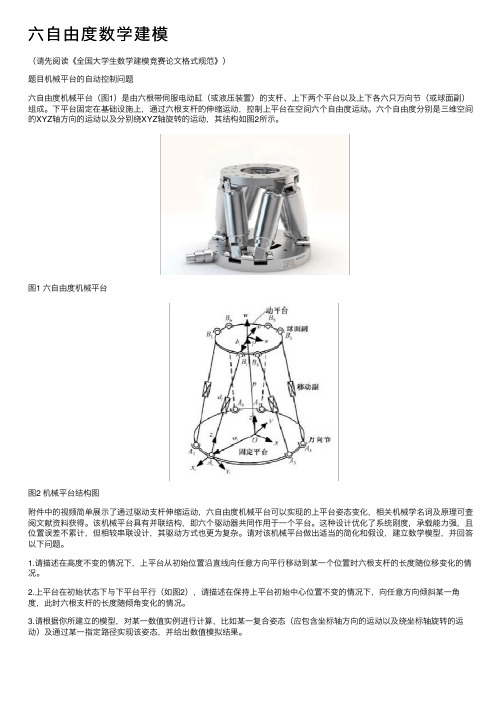
六⾃由度机械平台(图1)是由六根带伺服电动缸(或液压装置)的⽀杆、上下两个平台以及上下各六只万向节(或球⾯副)组成。
下平台固定在基础设施上,通过六根⽀杆的伸缩运动,控制上平台在空间六个⾃由度运动。
六个⾃由度分别是三维空间的XYZ轴⽅向的运动以及分别绕XYZ轴旋转的运动,其结构如图2所⽰。
图1 六⾃由度机械平台
图2 机械平台结构图
附件中的视频简单展⽰了通过驱动⽀杆伸缩运动,六⾃由度机械平台可以实现的上平台姿态变化,相关机械学名词及原理可查阅⽂献资料获得。
该机械平台具有并联结构,即六个驱动器共同作⽤于⼀个平台。
这种设计优化了系统刚度,承载能⼒强,且位置误差不累计,但相较串联设计,其驱动⽅式也更为复杂。
请对该机械平台做出适当的简化和假设,建⽴数学模型,并回答以下问题。
1.请描述在⾼度不变的情况下,上平台从初始位置沿直线向任意⽅向平⾏移动到某⼀个位置时六根⽀杆的长度随位移变化的情况。
2.上平台在初始状态下与下平台平⾏(如图2),请描述在保持上平台初始中⼼位置不变的情况下,向任意⽅向倾斜某⼀⾓度,此时六根⽀杆的长度随倾⾓变化的情况。
3.请根据你所建⽴的模型,对某⼀数值实例进⾏计算,⽐如某⼀复合姿态(应包含坐标轴⽅向的运动以及绕坐标轴旋转的运动)及通过某⼀指定路径实现该姿态,并给出数值模拟结果。
六自由度运动平台正解(几何法)
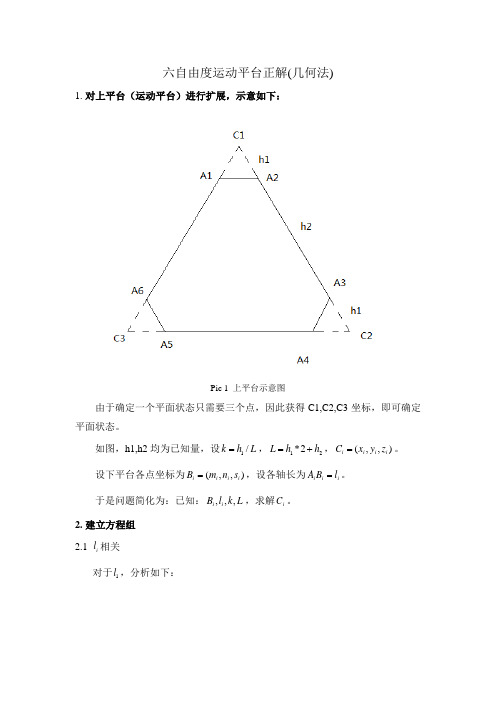
六自由度运动平台正解(几何法)1. 对上平台(运动平台)进行扩展,示意如下:Pic 1 上平台示意图由于确定一个平面状态只需要三个点,因此获得C1,C2,C3坐标,即可确定平面状态。
如图,h1,h2均为已知量,设L h k /1=,212*h h L +=,),,(i i i i z y x C =。
设下平台各点坐标为),,(i i i i s n m B =,设各轴长为i i i l B A =。
于是问题简化为:已知:L k l B i i ,,,,求解i C 。
2. 建立方程组 2.1 i l 相关对于1l ,分析如下:Pic 2 单轴示意图由图可知:向量3111111111*C C k C B A C C B A B +=+=,即,1111111131313),,(),,(l s z n y m x z z y y x x k=---+---所以:)1......(0])1([])1([])1([21211321132113=---++--++--+l s z k kz n y k ky m x k kx同理有:)6......(0])1([])1([])1([)5......(0])1([])1([])1([)4......(0])1([])1([])1([)3......(0])1([])1([])1([)2......(0])1([])1([])1([2626312631263125253225322532242423242324232323212321232122221222122212=---++--++--+=---++--++--+=---++--++--+=---++--++--+=---++--++--+l s z k kz n y k ky m x k kx l s z k kz n y k ky m x k kx l s z k kz n y k ky m x k kx l s z k kz n y k ky m x k kx l s z k kz n y k ky m x k kx2.2 L 相关)9......(0)()()()8......(0)()()()7......(0)()()(222322322322312312312221221221=--+-+-=--+-+-=--+-+-L z z y y x x L z z y y x x L z z y y x x 3. 求解3.1 联立方程组(1)-(9),牛顿迭代法解方程组,即可求的i C ,取0>i z ,可得唯一解。
一种数字式六自由度运动平台的开发
六自由度运动平台,由于有极为广阔的应用前景,近几年,引起了国内外科研、院校广泛的研究兴趣。
六自由度运动平台是由6只液压缸,上、下各6只万向铰链和上、下2个平台组成。
下平台固定在基础上,借助6只液压缸的伸缩运动,完成上平台在空间6个自由度( X、Y、Z、α、β、γ)的运动,从而可以模拟出各种空间运动姿态,可广泛应用到各种训练模拟器,如飞行模拟器、舰艇模拟器、海军直升机起降模拟平台、坦克模拟器、汽车驾驶模拟器、火车驾驶模拟器、地震模拟器,以及动感电影、娱乐设备等领域,甚至可用到空间宇宙飞船的对接,空中加油机的加油对接中。
在加工业可制成六轴联动机床、灵巧机器人等。
由于六自由度运动平台的研制涉及机械、液压、电气、控制、计算机、传感器,空间运动数学模型、实时信号传输处理、图形显示、动态仿真等一系列高科技领域,因而六自由度运动平台的研制变成了高等院校、研究院所在液压和控制领域中水平的标志性象征。
国外某大型液压公司的总部大厅里,向客人展示水平的第一个标志就是六自由度运动平台,笔者认为,六自由度运动平台是液压及控制技术领域的皇冠级产品,掌握了它,在液压和控制领域,基本上就没有了难题。
以下介绍它的开发过程。
2 传统的伺服液压控制六自由度运动平台到目前为止,世界上所有国家和研制单位,大型平台都无一例外地采用了液压伺服控制系统。
国内以几所名牌大学的研究水平较高,其控制原理基本相同,六自由度平台单缸控制框图如图1所示。
从图中可看出,主控计算机是完成空问状态的实时解算,然后将解算结果送到6个单缸控制器,经数/模转换后送给伺服放大器、伺服阀、伺服缸推动平台运动。
伺服缸的位移和压力通过2只传感器并经模/数转换后送给计算机,完成闭环控制。
该伺服系统最大的难点是传递环节多、控制过于复杂、调试困难、可靠性差、伺服阀抗干扰、抗污染能力弱、故障率高,因而国内尽管许多单位进行了研制,但大面积推广的却始终不多。
图1 平台单缸控制方框图3 六自由度平台控制的空间状态解算(1)顺解(顺向解):即己知6只液压缸的长度,求解平台姿态,到目前为止,还没有直接中的正解方程式,只能采用叠代方法,利用计算机快速运算的特点和上铰链的结构条件约束来逼近求解平台姿态。
六自由度微动平台机构设计

摘要摘要本文对一种新型的6-(P-2P-S)并联机器人的精度进行了分析,这种机器人是由Stewart平台经过变异得到的。
介绍了该并联机器人的特点,利用空间机构学理论分析了机构的位置正反解,并分析了该机构在正交位姿的运动解耦性能。
基于该并联机器人的结构约束,研究了该机构的工作空间,并定量分析了该机构参数对工作空间体积大小的影响。
定义了线速度各向同性性能评价指标,并给出各向同性性能指标在工作空间内的分布情况。
采用对并联机构运动学方程取微分的方法求得各主要误差源和末端误差的映射关系,使用叠加原理获得了在综合多种误差影响因素作用下并联机构的几何误差模型,利用蒙特卡洛技术对终端平台误差进行了分析。
采用绝对误差敏感度和误差方向敏感度这两个误差评价指标,将主要误差影响因素对机构终端误差的影响进行了分析。
以该并联机构的全域各向同性性能指标和全域综合误差指标为依据对该机构进行了参数设计。
关键词并联机器人;正交结构;性能指标;几何误差;蒙特卡洛方法燕山大学工学硕士学位论文AbstractThe thesis focuses on the accuracy research on a novel 6-(P-2P-S) orthogonal parallel robot, the robot is developed based on the Stewart platform mechanism.Its layout feature is presented according to the previous research results. The forward and reverse position are established by using spatial mechanisms. The paper also shows that the novel parallel robot is characterized by decoupling at its orthogonal position.Base on the architecture constraints, its workspace is investigated. The effects of the design parameters to the workspace volume are studied quantitatively.Kinematics transmission isotropy evaluation criteria is defined. The distribution of the defined evaluation criteria are presented on the workspace.To get the mapping relationship between the influencing factors and the end error of the 6-(P-2P-S) parallel robot, the kinematics equation are differentiated. The analytic expression of the geometric error of the 6-(P-2P-S) parallel robot is obtained by using the superposition theorem and comprehensively considering the influencing factor. The distribution on terminal platform errors is discussed using Monte-Carlo method. By comprehensively considering the two evaluation indicators: absolute error sensitivity and error isotropy sensitivity, the influence of the influencing factor effecting on the end effector is analyzed.Based on the workspace of a novel 6-(P-2P-S) parallel robot, geometry parameter of the parallel mechanism is optimized which depend on the glob kinematics and the glob equal errors.Keywords Parallel robot; Orthogonal structure; Performance evaluation criteria;Geometric error; Monte-Carlo method目录目录摘要 (Ⅰ)Abstract (Ⅱ)第 1 章绪论 (1)1.1并联机器人概述 (1)1.2并联机器人发展状况 (2)1.3本论文的选题意义及主要研究内容 (8)第2章新型6-(P-2P-S)并联机器人的位置分析 (10)2.1概述 (10)2.2 6-(P-2P-S)并联机器人的机构描述 (10)2.2.1结构布局 (10)2.2.2机构特点 (11)2.3 6-(P-2P-S)并联机器人的位置分析 (12)2.3.1动平台姿态描述 (13)2.3.2位置分析 (14)2.3.3正交位姿解耦分析 (17)2.4本章小结 (18)第3章新型6-(P-2P-S)并联机器人工作空间分析 (20)3.1概述 (20)3.2工作空间定义 (20)3.3工作空间分析 (22)3.3.1 约束分析 (22)3.3.2 工作空间的搜索方法 (23)3.3.3 工作空间形状分析 (26)3.4 结构尺寸对工作空间的影响 (28)燕山大学工学硕士学位论文3.5 本章小结 (30)第4章新型6-(P-2P-S)并联机器人的运动学传递性能分析 (31)4.1概述 (31)4.2运动学传递性能分析 (31)4.2.1 雅可比矩阵的求解 (31)4.2.2 运动学传递各向同性性能评价指标 (33)4.2.3正交位姿时运动学传递各向同性性能分析 (39)4.3本章小结 (40)第5章新型6-(P-2P-S)并联机器人的精度分析 (41)5.1 概述 (41)5.2 误差模型的建立 (41)5.2.1建模方法综述 (41)5.2.2模型建立 (42)5.2.3考虑间隙误差和垂直度误差的误差模型 (45)5.3 基于蒙特卡洛方法的误差分析 (46)5.3.1 制造误差随机量抽样 (46)5.3.2 球铰间隙误差随机量抽样 (46)5.3.3 误差的蒙特卡洛模拟 (47)5.4 误差的评价指标 (52)5.5 本章小结 (55)第6章6-(P-2P-S)并联机器人的结构参数设计 (56)6.1概述 (56)6.2并联机器人的结构参数设计 (56)6.2.1结构参数对工作空间大小的影响 (57)6.2.2结构参数对运动学性能的影响 (58)6.2.3结构参数对全域综合误差的影响 (59)6.3本章小结 (62)结论 (63)参考文献 (64)目录攻读硕士学位期间承担的科研任务与主要成果 (69)致谢 (70)作者简介 (71)燕山大学工学硕士学位论文第1章绪论第 1 章绪论1.1 并联机器人概述机器人的出现充分体现人类的创造力,是人类智慧的结晶。
六维台样本

32 kg
Rack 19″ ,3U 450×435×133 mm
以太网 230 V AC 50-60 Hz
轴坐标
范围
(1)
分辨精度
线行程 Tx
±75 mm
0.5 μm
线行程 Ty
±75 mm
0.5 μm
线行程 Tz
±50 mm
0.5 μm
角度轴 Rx
±15°
2.5 μrad
±20 mm
0.1 μm
线行程 Ty
±20 mm
0.1 μm
线行程 Tz
±10 mm
0.1 μm
角度轴 Rx
±10°
2 μrad
角度轴 Ry
±10°
2 μrad
角度轴 Rz
±15°
2 μrad
(1). 当其他轴在零位,以上平台中心为旋转点,此轴线角的最大值。 (2). 在每一个正负运动的方向,重复精度都会有正负 2 的误差。
AIRE 望远镜(印度)
六维台
有效负载 上平台尺寸 平台零位高度
重量 环境
控制
从垂直到水平负载达 到 500kg ø500 mm
~450 mm
90-120 kg 温度 -20℃ --40℃
湿度达 90%
控制盒尺寸 (W×D×H)
界面
需求电源
600×550×850 mm
以太网 120-240 V AC/8A
08
Sures
应用: 望远镜的定位 高精度定位 光学调整 无线测验 天线鉴定
技术参数 : 有效负载:500KG 分辨精度:0.1um 低交叉连轴运动 6DOF 低交叉耦合运动
SURES 是定位精度非常高的六维台。 它具备高刚性和高精度,专门设计 精密调节巨大望远镜的次镜。
法国舒曼精密六维台样本2015

六维台
有效负载
上平台尺寸 平台零位高度
重量 控制
控制盒尺寸 (W×D×H)
界面
需求电源
200 kg 垂直方位 80 kg 水平方位
ø300 mm 350 mm
32 kg
Rack 19″ ,3U 450×435×133 mm
以太网 230 V AC 50-60 Hz
轴坐标
范围
(1)
分辨精度
线行程 Tx
±75 mm
0.5 μm
线行程 Ty
±75 mm
0.5 μm
线行程 Tz
±50 mm
0.5 μm
角度轴 Rx
±15°
2.5 μrad
人体工程控制系统 六维台的控制系统是由 SYMETRIE 独立研发的,分为两种模式: 一种独立的系统,具有专用的应用程序接(API) 一种专用控制软件通过人机图形用户界面(GUI)。
六维台
有效负载 上平台尺寸 中心孔径 平台零位高度
重量 控制
控制盒尺寸 (W×D×H)
界面
需求电源
500g 垂直方向 ø70 mm/2.76 in ø31 mm/1.22 in 65 mm/2.56 in
±20 mm
0.1 μm
线行程 Ty
±20 mm
0.1 μm
线行程 Tz
±10 mm
0.1 μm
角度轴 Rx
±10°
2 μrad
角度轴 Ry
±10°
2 μrad
六自由度平台
速度环用来调节电机速度,以提高系统动态响应快 速性,方法是根据负载情况的变化调节电机电流 速度环的输入就是位置环PID调节后的输出以及位 置设定的前馈值,称为“速度设定”,“速度设定” 和“速度环反馈”值进行比较后的差值在速度环做 PID调节(主要是比例增益和积分处理)后输出是 “电流环的给定”
当电机停止时如果位置环的设置适当位置偏差应接近于零位置环的输入是外部的脉冲外部的脉冲经过平滑滤波处理和电子齿轮计算后作为位置环的设定设定和来自编码器反馈的脉冲信号经过偏差计数器的计算后的数值在经过位置环的pid调节比例增益调节无积分微分环节后输出和位置给定的前馈信号的合值就构成了速度环的给速度环用来调节电机速度以提高系统动态响应快速性方法是根据负载情况的变化调节电机电流速度环的输入就是位置环pid调节后的输出以及位置设定的前馈值称为速度设定速度设定和速度环反馈值进行比较后的差值在速度环做pid调节主要是比例增益和积分处理后输出是电流环的给定力矩环用来调节电机的传动力矩
六自由度平台控制
上位机通过网卡给主控计算机发送指令,主控 计算机接收到有关模拟平台运动参数的指令后, 经过空间运动模型变换,运用平台反解解出六 只电动缸的伸长量,PCL841启动现场CAN进行 传输,由驱动器内部PC得到信息并驱动电动机 转动。而安装在电动机上的编码器、检测出电 动机的力矩,速度,位置信息并发送到驱动器, 构成闭环控制系统,实时精确的控制各电动缸 的伸长量,并把信息传输给主控机,主控机确 保六只电动缸的协调动作,从而使平台进行所 要求的运动
六自由度平台建模
静坐标系 oxyz 的原点位于下 平台六个铰支点的外接圆圆 心, 平面与下平台的六个铰 支点所在的面重合, oy与oB1 重合,方向如图所示。动坐 标系ox1y1z1原点位于上平台 基圆圆心,与上平台的六个 铰支点所在的面重合,oy1 与 oA1重合,方向如图 所示。
基于六自由度液压平台设计
机电控制系统原理与设计题目: 基于六自由度液压平台设计学院:机电工程学院专业班级:机械工程(04)班学生姓名:杨斌学号:20140220021目录第1章六自由度平台的简介和应用 (1)1.1六自由度平台的结构与特点 (1)1.2六自由度并联平台的应用方向 (2)第2章六自由度平台工作原理及分析 (5)2.1六自由度平台工作原理 (5)2.2六自由度运动平台的工作空间 (9)2.3六自由度并联机构驱动方式 (10)第3章六自由度平台控制系统设计 (12)3.1运动平台的液压系统简介 (12)3.2动力泵站 (13)3.3液压系统的工作原理 (13)第4章基于SOLIDWORKS虚拟样机建模与仿真 (16)4.1液压平台的基本结构设计 (16)4.2虚拟样机的建立与仿真 (17)4.2.1零件建模 (17)4.2.2装配设计 (18)4.2.3 运动分析 (19)第5章基于PID的系统控制 (21)5.1液压伺服并联平台的动态模型 (21)5.2PID控制原理 (23)第6章总结 (26)第1章六自由度平台的简介和应用六自由度运动平台是由1965 年德国结构工程师Stewart 发明研制的,所以也叫Stewart 平台。
它由一个上平台(动平台),一个下平台(静平台),六个可伸缩的杆件和12 个运动铰链将杆件和上、下平台连接而构成的一个并联式运动平台六自由度运动平台是用于飞行器、运动器(如飞机、车辆)模拟训练的动感模拟装置,是一种并联运动机构,它通过改变六个可以伸缩的作动筒来实现平台的空间六自由度运动(垂直向、横向、纵向、俯仰、滚转、摇摆),即X、Y、Z 方向的平移和绕X、Y、Z轴的旋转运动,以及这些自由度的复合运动。
1.1 六自由度平台的结构与特点六自由度平台由下平台(固定底座)、运动平台、虎克铰(或球铰)和六个作动器组成,如图1.1所示。
伺服驱动缸通过虎克铰以并联的形式将固定底座和运动平台连接起来,因而六个伺服驱动缸均可独立地伸缩。
六自由度平台

(一)
六自由运动平台介绍
六自由度液压平台技术参数
六自由度运动平台是由六支油缸,上、下各六只万向铰链和上、下两个平台组成,下平台固定在基础上,
借助六只油缸的伸缩运动,完成上平台在空间六个自由度(α,β,γ, X,Y,Z)的运动,从而可以模拟出各种空间运动姿态。
六自由度运动平台涉及到机械、液压、电气、控制、计算机、传感器,空间运动
数学模型、实时信号传输处理等一系列高科技领域,因此六自由度运动平台是液压和控制领域水平的标志
性象征。
主要包括平台的空间运动机构、空间运动模型、液压系统、控制系统。
1 六自由度平台空间机构技术参数
六自由度平台结构效果图如图1所示。
图1 六自由度平台
六自由度运动平台由上下平台和六个液压油缸组成。
六个液压缸上端点两两组成上平台三个支点,六个液
压缸下端点两两组成下平台三个支点。
上下三个支点分别在假设的圆周上,并且是120o等分,既分别是两个等边三角形的顶点。
根据不同的运动范围,油缸的行程和上下平台半径不同。
结构如图2所示。
图2 六自由度平台结构图
根据标书要求,六自由度平台结构参数如下:
上平台半径: 0.8m;。
六自由度摇摆平台

大黄蜂机器人六自由度摇摆台大黄蜂机器人有限公司的六自由度平台系统由采用Stewart机构的六自由度运动平台、计算机控制系统、驱动系统等组成。
六自由度运动平台(如下图)的下平台安装在地面上,上平台为运动平台,它由六只电动缸支承,运动平台与电动缸采用六个虎克铰连接,电动缸与固定基座采用六个虎克铰连接,六只电动缸采用伺服电机驱动的电动缸。
计算机控制系统通过协调控制电动缸的行程,实现运动平台的六个自由度的运动,即笛卡尔坐标系内的三个平移运动和绕三个坐标轴的转动。
各主要部分简述如下:本设备主要由以下部分组成:运动上平台、下平台(基座)、电动缸及伺服电机、驱动器系统、综合控制及监测系统。
各自功能如下:上平台:是有效载荷的安装基面,提供六自由度的摇摆运动。
下平台:是六自由度摇摆台的安装基面,需要承受足够大的冲击力。
电动缸及伺服电机:通过控制电动缸活塞杆的行程,实现运动平台台体的六自由度运动,共6套。
驱动器系统:接收用户控制指令,通过控制伺服电机的输入,对伺服电机的输出转速和转角进行控制,达到控制电动缸活塞杆出速度和行程的目的,共6套。
综合控制监测系统:硬件为用户计算机,软件为研制方配合开发;同时,它还对平台的运动过程进行监测,预防和处理系统的异常情况。
平台总体运动能力指标如上表,具体表述如下:a.平台定位精度及重复定位精度为0.5mm及0.1mm;b.平台转动精度及重复转动精度为0.1°及0.05°;c.行程回差小于0.2mm;d.平台X方向运动速度可从0mm/s到250mm/s连续变化;YZ方向运动速度可从0mm/s到250mm/s连续变化;e.单支杆可承受轴向力不小于700N;f.单支杆的运动速度可从0m/s到250mm/s连续变化;g.平台中位位置固有频率:不小于40Hz;h.机械组件需具有开放性,可拆卸组装;i.机械设计安全系数不小于 2.0,驱动裕度不小于 3.0;j.额定载荷下,全行程往复工作寿命不小于1×104次,存储寿命不小于48月;k.运动系统频率:0HZ~10HZl.系统功率需求:1500Wm.漂移量:平台系统连续运行12h以上,任何一个电动缸的位置漂移不超过0.00025m。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
±1500/s2
最大有效负载 运动平台X轴惯量 运动平台Y轴惯量 运动平台Z轴惯量
800kg 700kg.m2 700kg.m2 700kg.m2
2000kg 3500kg.m2 3500kg.m2 3500kg.m2
3000kg 5500kg.m2 5500kg.m2 5500kg.m2
北京办事处 电话:010-87757858 传真:010-87757857
青岛办事处 电话:15315001565
传真:0532-83728891
天津办事处 电话:022-58265289
传真:022-27252297
南京办事处 电话:025-58304271/2/3 传真:025-86659402
上下平台虎克铰接 高精密加工虎克铰接,保证系统的位置精密度和运动平滑无间隙,有限元分析保证虎克铰接及销轴的安全性,维护成本低
上下工作平台 根据客户订制的特殊上下平台,有限元分析保证足够的强度,上平台可以增加旋转平台,增加到7自由度
合肥办事处 电话:0551-7193652
传真:0551-7193651
运动平台的重心高度 约0.6m 约1m
约1.5m 约1.5m 约1.8m 约1.8m 约1.8m
运动平台的总高度 约2.5m 约3m
约4m
约5m
约7m
约7.5m 约7.5m
电源
220V 50HZ 380V 50HZ 380V 50HZ 380V 50HZ 380V 50HZ 380V 50HZ 380V 50HZ
动感仿真六自由度平台D6B 系列的有效载荷范围为0.5吨-20吨,高逼真仿真动感平台通过与高性能视觉仿真对 接,可以广泛应用在各种训练模拟器如飞行模拟器、舰艇模拟器、海军直升机起降模拟平台、坦克模拟器、汽 车驾驶模拟器、火车驾驶模拟器、地震模拟器以及动感电影、娱乐设备等领域。
精密定位六自由度平台W6B系列的有效载荷为0.5吨-50吨,位置控制精度达到0.02mm,外配激光对直仪可以达 到更高精度0.01mm。可以广泛应用在各种汽车姿态测试设备,飞机/导弹等飞行器飞行姿态测试设备等精密测 试多自由度平台,以及空间宇宙飞船的对接,空中加油机的加油对接,飞机整机装配, 卫星装配等。
滚转角度 偏航角度 最大有效负载
±10弧分 ±10弧分 kg
±15弧分 ±15弧分 3000kg
±15弧分 ±15弧分 5000kg
±15弧分 ±15弧分 10000kg
±15弧分 ±15弧分 15000kg
±15弧分 ±15弧分 20000kg
以上的参数仅供参考,可以根据客户的实际需求,做相应的非标设计。
±0.10m ±100 ±100
±100
±0.40m ±250 ±250
±250
±0.80m ±250 ±250
±250
±1m ±250 ±250
±250
±1.5m ±250 ±250
±250
±1.5m ±250 ±250
±250
±1.5m ±250 ±250
±250
单自由度重复精度 垂直方向 纵向方向
±1500/s2 ±1500/s2
±1500/s2
±9.8m/s2 ±9.8m/s2 ±9.8m/s2
±1500/s2 ±1500/s2
±1500/s2
±9.8m/s2 ±9.8m/s2 ±9.8m/s2
±1500/s2 ±1500/s2
±1500/s2
±9.8m/s2 ±9.8m/s2 ±9.8m/s2
±0.45m/s
±300/s ±300/s ±300/s
±1m/s
±300/s ±300/s ±300/s
±1m/s
±300/s ±300/s ±300/s
±1m/s
±300/s ±300/s ±300/s
单自由度最大加速度 垂直方向 纵向方向 侧向方向 俯仰角度 滚转角度 偏航角度
±5.0m/s2 ±5.0m/s2 ±5.0m/s2
5000kg 10000kg 15000kg 20000kg 18000kg.m2 40000kg.m2 60000kg.m2 120000kg.m2 18000kg.m2 40000kg.m2 60000kg.m2 120000kg.m2 18000kg.m2 40000kg.m2 60000kg.m2 120000kg.m2
全电动六自由度仿真平台
性能卓越的全电动六自由度平台
全新革命性结构设计与六轴最先进伺服控制原理的结合,力姆泰克公司引进国外的专业技术在国内全新推出全 电动六自由度平台。将完全替代市场上原有的液压六自由度平台,避免了大型液压泵站,管道,阀门等复杂系 统。
力姆泰克六自由度平台分为两大系列:动感仿真六自由度平台D6B系列,精密定位六自由度平台W6B系列
系统平均功率
4KW
5KW
6KW
9KW
11KW
20KW
30KW
系统峰值功率
20KW
30KW
30KW
30KW
50KW
70KW
90KW
以上的参数仅供参考,可以根据客户的实际需求,做相应的非标设计。
精密定位六自由度平台W6B系列参数规格
型号
W6B-800KG W6B-2000KG W6B-3000KG W6B-5000KG W6R-10000KGW6R-15000KGW6R-2000KG
动感仿真六自由度平台D6B系列参数规格
型号 传动丝杠种类
D6B-800KG D6B-2000KG D6B-3000KG D6B-5000KG D6R-10000KGD6R-15000KGD6R-2000KG 滚珠丝杠 滚珠丝杠 滚珠丝杠 滚珠丝杠 行星丝杠 行星丝杠 行星丝杠
单自由度最大偏移量
垂直方向
安装方便,维护简单
全新的模块化组合及自由灵活的系统集成, 满足 客户不同需求
高精密传动系统及优化组合, 保证系统的高效率 达到85%
多重机械电气安全保护, 保证设备的绝对安全
系统高响应时间及高加速度及低噪音 可视性友好人机界面,操作简单 内置传感器检测运动异常,自动返回平台零点。 配置不间断电源,保证设备断电安全
传动丝杠种类
滚珠丝杠 滚珠丝杠 滚珠丝杠 滚珠丝杠 行星丝杠 行星丝杠 行星丝杠
单自由度最大偏移量
垂直方向 纵向方向
±0.10m ±0.40m ±0.80m ±1m ±0.10m ±0.40m ±0.80m ±1m
±1.5m ±1.5m
±1.5m ±1.5m
±1.5m ±1.5m
侧向方向 俯仰角度 滚转角度 偏航角度
常州办事处 电话:0519-81181368 传真:0519-81181378
重庆办事处 电话:023-61702532/33 传真:023-61700155
深圳办事处 电话:0755-26097775/85 传真:0755-26097675
沈阳办事处 电话:024-22508601/2
传真:024-22508603
±0.80m ±250 ±250 ±250
±1m ±250 ±250 ±250
±1.5m ±250 ±250 ±250
±1.5m ±250 ±250 ±250
±1.5m ±250 ±250 ±250
垂直方向
±0.45m/s ±0.30m/s ±0.45m/s ±0.45m/s ±1m/s ±1m/s ±1m/s
我们专业的技术团队可以按照客户的各种特殊的要求,提供不同特性参数的2/3/4/5/6/7自由度平台。我们为 您提供成套系统的服务:售前技术咨询,方案设计,售后安装调试,全程技术答疑,24小时快速响应等优质服 务。
产品特点:
为增强仿真的真实感而有的高性能动感提示性 能;
全数字化闭环伺服控制,专业运动控制卡保证运 动的平滑过渡以及高仿真性,减少动感漂移和失 真。
长沙办事处 电话:0731-85176623
传真:0731-85176613
无锡办事处 电话:0510-82624226
传真:0510-82624226
纵向方向
±0.45m/s ±0.30m/s ±0.45m/s ±0.45m/s ±1m/s ±1m/s ±1m/s
侧向方向 俯仰角度 滚转角度 偏航角度
±0.45m/s
±300/s ±300/s ±300/s
±0.30m/s
±300/s ±300/s ±300/s
±0.45m/s
±300/s ±300/s ±300/s
六自由度运动模拟器系统组成
运动平台控制系统
包含:特制双开门控制柜,工控机, 运动控制卡,伺服驱动器及布线,触 摸屏等。菜单式模块化人机界面,可 以清楚设置部分参数,内含多项电气 控制保护程序,保持良好的与主机的 快速通讯,内置运动能源优化分配系 统,提高能源使用效率,降低能耗。
视景仿真系统 三个42寸显示器或者环幕投影等视景 系统,达到真实的视觉效果。匹配高 保真音响系统,如驾驶身临其境。
±4000/s2 ±4000/s2
±4000/s2
±7.0m/s2 ±7.0m/s2 ±9.0m/s2
±2000/s2 ±2000/s2
±2000/s2
±8.0m/s2 ±8.0m/s2 ±9.0m/s2
±2000/s2 ±2000/s2
±2000/s2
±8.0m/s2 ±8.0m/s2 ±9.0m/s2
±0.10m ±0.40m ±0.80m ±1m
±1.5m ±1.5m ±1.5m
纵向方向
±0.10m ±0.40m ±0.80m ±1m
±1.5m ±1.5m ±1.5m
侧向方向 俯仰角度 滚转角度 偏航角度 单自由度最大速度
±0.10m ±100 ±100 ±100