步进电机正反转控制C语言程序只为初学者
89C51单片机对步进电动机的C语言控制程序
89C51单片机对步进电动机的控制程序啊?兄弟做的如何了?我也是不懂啊,真是有点同病相怜了这个程序是课程设计的,现在老师要复杂点的,不让用延时程序了,因为浪费CPU时间,改为定时器扫描防抖,还有显示是用四个数码管,用四个键控制,其中一个起停,一个正反转,两个加减速。
我只能写到这些了,你有何进展,交流一下吧#define uchar unsigned char //定义一下方便使用#define uint unsigned int#define ulong unsigned long#include <reg52.h> //包括一个52标准内核的头文件sbit P10 = P1^0; //头文件中没有定义的IO就要自己来定义了sbit P11 = P1^1;sbit P12 = P1^2;sbit P13 = P1^3;sbit K1 = P3^2;sbit K2 = P3^5;sbit K3 = P3^6;sbit K4 = P3^7;sbit P20=P2^0;sbit P21=P2^1;bit ldelay=0; //长定时溢出标记,预置是0uchar a,m=50;uchar result;uint b,n;uint i,j;char code dx516[3] _at_ 0x003b;//这是为了仿真设置的/*********************************************************************** ***********///电机正转void zheng_z(){ uchar code ledp1[8]={0xfe,0xfc,0xfd,0xf9,0xfb,0xf3,0xf7,0xf6};//预定的写入P1的值正转uchar ledi1; //用来指示正转显示顺序P1=ledp1[ledi1];//读出一个值送到P1口ledi1++;//指向下一个if(ledi1==8)ledi1=0; //到了最后一个灯就换到第一个}//电机反转void fan_z(){ uchar code ledp2[8]={0xf6,0xf7,0xf3,0xfb,0xf9,0xfd,0xfc,0xfe};//预定的写入P1的值反转uchar ledi2; //用来指示反转显示顺序P1=ledp2[ledi2];//读出一个值送到P1口ledi2++; //指向下一个if(ledi2==8)ledi2=0; //到了最后一个灯就换到第一个}//减速void jian_s(){m+=5;if(m>=50)m=50;}//加速void jia_su(){ m-=5;if(m<=10)m=10;}/*******************************************************************/ void delay(uint j){j=100;for(i=0;i<j;i++){;}}void display(uint x){switch(x){case 0: P0=0xC0;break;case 1: P0=0xF9;break;case 2: P0=0xA4;break;case 3: P0=0xB0;break;case 4: P0=0x99;break;case 5: P0=0x92;break;case 6: P0=0x82;break;case 7: P0=0xF8;break;case 8: P0=0x80;break;case 9: P0=0x90;break;}}void sudu(uint c){switch(c){case 50: result=15;break;case 45: result=17;break;case 40: result=19;break;case 35: result=21;break;case 30: result=25;break;case 25: result=30;break;case 20: result=38;break;case 15: result=50;break;case 10: result=75;break;}}/*******************************************************************/ //主程序void main(void){TMOD = 0x01; //设定时器0为16位模式TH0 =0xdb; //赋T0的预置值0xdbTL0 =0xff;TR0=1; //启动定时器ET0=1; //打开定时器0中断EA=1; //打开总中断while(1) //主程扫描各键值{if(ldelay) //发现有时间溢出标记,进入处理{ldelay=0; //清除标记zheng_z();if(!K3)a=1; //如果读到K3为0if(!K4)a=0; //如果读到K4为0if(a==1)zheng_z();elsefan_z();if(!K1) //如果读到K1为0jian_s(); //减速if(!K2) //如果读到K2为0jia_su(); //加速/*********************************************************************** ************/sudu(m);b=result/10;n=result%10;P20=1;P21=0;display(b);delay (2);P20=~P20;P21=~P21;display(n);delay (2);}}}//定时器0中断timer0() interrupt 1{static uchar t;TH0 =0xdb; //赋T0的预置值0xdbTL0 =0xff;//TF0=0;t++;if(t==m){ t=0;ldelay=1;}}//定时器1中断/*timer1() interrupt 3{static uchar t;TF0=0;t++;if(t==20) { t=0; ldelay=1; } }*/。
步进电机c程序
步进电机控制程序(2008-06-05 19:07:55)转载分类:程序设计标签:it步进电机(键盘控制可调速)#include <reg51.h>#define uchar unsigned charstatic unsigned int count; //计数static int step_index; //步进索引数,值为0-7static bit turn; //步进电机转动方向static bit stop_flag; //步进电机停止标志static int speedlevel; //步进电机转速参数,数值越大速度越大,最小值为1,速度最慢static int spcount; //步进电机转速参数计数void ddelay(void); //键盘扫描延时函数void delay(unsigned int endcount); //延时函数,延时为endcount*1毫秒void gorun(); //步进电机控制步进函数sbit P10=P2^0 ; //电机端口定义sbit P11=P2^1 ;sbit P12=P2^2;sbit P13=P2^3 ;void ddelay(void){uchar i;for (i=300;i>0;i--);}uchar keyscan(void){uchar scancode;uchar tmpcode;P1 = 0xf8; // 发全0行扫描码if ((P1&0xf8)!=0xf8) // 若有键按下{ddelay(); // 延时去抖动if ((P1&0xf8)!=0xf8) // 延时后再判断一次,去除抖动影响{scancode = 0xfe;while((scancode&0x08)!=0) // 逐行扫描{P1 = scancode; // 输出行扫描码if ((P1&0xf8)!=0xf8) // 本行有键按下tmpcode = (P1&0xf8)|0x07;return((~scancode)+(~tmpcode)); // 返回特征字节码,为1的位即对应于行和列 }else scancode = (scancode<<1)|0x01; // 行扫描码左移一位}}}return(0); // 无键按下,返回值为0}void main(void){uchar key;count = 0;step_index = 0;spcount = 0;P10 = 0;P11 = 0;P12 = 0;P13 = 0;EA = 1; //允许CPU中断TMOD = 0x11; //设定时器0和1为16位模式1ET0 = 1; //定时器0中断允许TH0 = 0xFc;TL0 = 0x18; //设定时每隔1ms中断一次TR0 = 1; //开始计数stop_flag = 0;turn=0;speedlevel = 20;while(1){key = keyscan();switch(key){case 0x09: //按键#,正转以speedlevel = 1的速度转1000*0.5MS=0.5Sstop_flag=0;turn = 0;speedlevel =10;gorun();delay(1000);break;case 0x0c: //按键*,停止2000*0.5MS=0.5Sstop_flag=1;break;case 0x0a: //按键0,反转以speedlevel = 1的速度转1000*0.5MS=0.5Sstop_flag=0;turn=1;speedlevel =10;gorun();delay(1000);break;case 0x11: // 按键9,以--speedlevel的加速转1000*0.5MS=0.5Sstop_flag=0;if (speedlevel==1){ speedlevel=1;}else { --speedlevel;}gorun();delay(1000);break;case 0x12: // 按键8,以++speedlevel的减速转1000*0.5MS=0.5Sstop_flag=0;++speedlevel;gorun();delay(1000);break;}}}//定时器0中断处理void timeint(void) interrupt 1{TH0=0xFc;TL0=0x18; //设定时每隔1ms中断一次count++;spcount--;if(spcount<=0) //速度调整,SPEEDLEVEL越大,延时越长(延时约为1MS*SPEEDLEVEL),{ // 频率越小,速度越慢spcount = speedlevel;gorun();}}void delay(unsigned int endcount)//延时函数,延时为endcount*0.5毫秒{count=0;do{}while(count<endcount);void gorun(){if (stop_flag==1) {P10 = 0;P11 = 0;P12 = 0;P13 = 0;return;}switch(step_index) {case 0: //0P10 = 1;P11 = 0;P12 = 0;P13 = 0;break;case 1: //0、1P10 = 1;P11 = 1;P12 = 0;P13 = 0;break;case 2: //1P10 = 0;P11 = 1;P12 = 0;P13 = 0;break;case 3: //1、2P10 = 0;P11 = 1;P12 = 1;P13 = 0;break;case 4: //2P10 = 0;P11 = 0;P12 = 1;P13 = 0;break;case 5: //2、3P10 = 0;P11 = 0;P12 = 1;P13 = 1;break;case 6: //3P10 = 0;P11 = 0;P12 = 0;P13 = 1;break;case 7: //3、0P10 = 1;P11 = 0;P12 = 0;P13 = 1;}if (turn==0) //正转{step_index++;if (step_index>7)step_index=0;}else{ //反转step_index--;if (step_index<0)step_index=7;}}步进电机(键盘控制可调速加显示)#include <reg51.h>#define uchar unsigned charstatic unsigned int count; //计数static int step_index; //步进索引数,值为0-7static bit turn; //步进电机转动方向static bit stop_flag; //步进电机停止标志static int speedlevel; //步进电机转速参数,数值越大速度越大,最小值为1,速度最慢static int spcount; //步进电机转速参数计数void ddelay(void); //键盘扫描延时函数void delay(unsigned int endcount); //延时函数,延时为endcount*1毫秒void gorun(); //步进电机控制步进函数void Delay400Ms(void);void LCMInit(void); //LCM初始化void WriteCommandLCM(unsigned char WCLCM,BuysC); //BuysC为0时忽略忙检测void DisplayOneChar(uchar X, uchar Y, uchar DData);void DisplayListChar(uchar X, uchar Y,uchar ListLength, uchar *DData,uchar n);sbit P10=P3^0 ; //电机端口定义sbit P11=P3^1 ;sbit P12=P3^2;sbit P13=P3^3 ;uchar code speed[]={ 0x3a,0x39,0x38,0x37,0x36,0x35,0x34,0x33,0x32,0x31,0x30};uchar code stop[] = {"stop"};uchar code go[] = {"go:"};uchar code back[] = {"back:"};uchar code max[] = {"max:8"};void ddelay(void){uchar i;for (i=300;i>0;i--);}uchar keyscan(void){uchar scancode;uchar tmpcode;P1 = 0xf8; // 发全0行扫描码if ((P1&0xf8)!=0xf8) // 若有键按下{ddelay(); // 延时去抖动if ((P1&0xf8)!=0xf8) // 延时后再判断一次,去除抖动影响{scancode = 0xfe;while((scancode&0x08)!=0) // 逐行扫描{P1 = scancode; // 输出行扫描码if ((P1&0xf8)!=0xf8) // 本行有键按下{tmpcode = (P1&0xf8)|0x07;return((~scancode)+(~tmpcode)); // 返回特征字节码,为1的位即对应于行和列 }else scancode = (scancode<<1)|0x01; // 行扫描码左移一位}}}return(0); // 无键按下,返回值为0}void main(void){uchar key;count = 0;step_index = 0;spcount = 0;P10 = 0;P11 = 0;P12 = 0;P13 = 0;EA = 1; //允许CPU中断TMOD = 0x11; //设定时器0和1为16位模式1ET0 = 1; //定时器0中断允许TH0 = 0xFc;TL0 = 0x18; //设定时每隔1ms中断一次TR0 = 1; //开始计数P0=0XFF;P3 &=0XEF; //573片选LCMInit(); //LCM初始化Delay400Ms();stop_flag = 0;turn=0;speedlevel = 5;DisplayListChar(0,0,3,go,1); //每次扫描键盘显示更新一次uchar code go[] DisplayOneChar(0,1,0x35); //每次扫描键盘显示更新一次while(1){key = keyscan();switch(key){case 0x09: //按键#,正转以speedlevel = 1的速度转1000*0.5MS=0.5S stop_flag=0;turn = 0;speedlevel =5;gorun();WriteCommandLCM(0x01,1);//显示清屏,DisplayListChar(0,0,3,go,0); //每次扫描键盘显示更新一次uchar code go[] DisplayOneChar(0,1,0x35); //每次扫描键盘显示更新一次delay(1000);break;case 0x0c: //按键*,停止2000*0.5MS=0.5Sstop_flag=1;WriteCommandLCM(0x01,1);//显示清屏,DisplayListChar(0,0,4,stop,0); //每次扫描键盘显示更新一次break;case 0x0a: //按键0,反转以speedlevel = 1的速度转1000*0.5MS=0.5S stop_flag=0;turn=1;speedlevel =5;gorun();WriteCommandLCM(0x01,1);//显示清屏,DisplayListChar(0,0,5,back,0); //每次扫描键盘显示更新一次DisplayOneChar(0,1,0x35); //每次扫描键盘显示更新一次delay(1000);break;case 0x11: // 按键9,以--speedlevel的加速转1000*0.5MS=0.5Sstop_flag=0;if (speedlevel==2){ speedlevel=2;}else { speedlevel--;}gorun();if(speedlevel==2){ DisplayListChar(0,1,5,max,0);}else {DisplayOneChar(0,1, speed[speedlevel]);} //每次扫描键盘显示更新一次 delay(1000);break;case 0x12: // 按键8,以++speedlevel的减速转1000*0.5MS=0.5Sstop_flag=0;speedlevel++;gorun();WriteCommandLCM(0x01,1);//显示清屏,if(turn==0){DisplayListChar(0,0,3,go,0); //每次扫描键盘显示更新一次uchar code go[] DisplayOneChar(0,1, speed[speedlevel]);} //每次扫描键盘显示更新一次else {DisplayListChar(0,0,5,back,0); //每次扫描键盘显示更新一次DisplayOneChar(0,1,speed[speedlevel]);} //每次扫描键盘显示更新一次delay(1000);break;}}}//定时器0中断处理void timeint(void) interrupt 1{TH0=0xFc;TL0=0x18; //设定时每隔1ms中断一次count++;spcount--;if(spcount<=0) //速度调整,SPEEDLEVEL越大,延时越长(延时约为1MS*SPEEDLEVEL),{ // 频率越小,速度越慢spcount = speedlevel;gorun();}}void delay(unsigned int endcount)//延时函数,延时为endcount*0.5毫秒{count=0;do{}while(count<endcount);}void gorun(){if (stop_flag==1){P10 = 0;P11 = 0;P12 = 0;P13 = 0;return;}switch(step_index){case 0: //0P10 = 1;P11 = 0;P12 = 0;P13 = 0;break;case 1: //0、1P10 = 1;P11 = 1;P12 = 0;P13 = 0;break;case 2: //1P10 = 0;P11 = 1;P12 = 0;P13 = 0;break;case 3: //1、2P10 = 0;P11 = 1;P12 = 1;P13 = 0;break;case 4: //2P10 = 0;P11 = 0;P12 = 1;P13 = 0;break;case 5: //2、3P10 = 0;P11 = 0;P12 = 1;P13 = 1;break;case 6: //3P10 = 0;P11 = 0;P12 = 0;P13 = 1;break;case 7: //3、0P10 = 1;P11 = 0;P12 = 0;P13 = 1;}if (turn==0) //正转 {step_index++;if (step_index>7)step_index=0; }else{ //反转step_index--;if (step_index<0)step_index=7;}}步进电机(自动循环调速)#include <reg51.h>sbit P00=P2^0 ;sbit P01=P2^1 ;sbit P02=P2^2;sbit P03=P2^3 ;static unsigned int count; //计数static int step_index; //步进索引数,值为0-7static bit turn; //步进电机转动方向static bit stop_flag; //步进电机停止标志static int speedlevel; //步进电机转速参数,数值越大速度越快,最小值为1,速度最慢static int spcount; //步进电机转速参数计数void delay(unsigned int endcount); //延时函数,延时为endcount*0.5毫秒void gorun(); //步进电机控制步进函数void main(void){count = 0;step_index = 0;spcount = 0;stop_flag = 0;P00 = 0;P01 = 0;P02 = 0;P03 = 0;EA = 1; //允许CPU中断TMOD = 0x11; //设定时器0和1为16位模式1ET0 = 1; //定时器0中断允许TH0 = 0xFE;TL0 = 0x0C; //设定时每隔0.5ms中断一次TR0 = 1; //开始计数turn = 0;do{speedlevel =4;delay(10000); //以speedlevel = 4的速度转2000*0.5MS=1Sspeedlevel =4;delay(10000); //以speedlevel = 4的速度转2000*0.5MS=1Sstop_flag=1;delay(6000);//停止,2000*0.5MS=3Sstop_flag=0;}while(1);}//定时器0中断处理void timeint(void) interrupt 1{TH0=0xFE;TL0=0x0C; //设定时每隔0.5ms中断一次count++;spcount--;if(spcount<=0){spcount = speedlevel;gorun();}}void delay(unsigned int endcount){count=0;do{}while(count<endcount);}void gorun(){if (stop_flag==1){P00 = 0;P01 = 0;P02 = 0;P03 = 0;return;}switch(step_index){case 0: //0P00 = 1;P01 = 0;P02 = 0;P03 = 0;break;case 1: //0、1P00 = 1;P01 = 1;P02 = 0;P03 = 0; break;case 2: //1P00 = 0;P01 = 1;P02 = 0;P03 = 0; break;case 3: //1、2P00 = 0;P01 = 1;P02 = 1;P03 = 0; break;case 4: //2P00 = 0;P01 = 0;P02 = 1;P03 = 0; break;case 5: //2、3P00 = 0;P01 = 0;P02 = 1;P03 = 1; break;case 6: //3P00 = 0;P01 = 0;P02 = 0;P03 = 1; break;case 7: //3、0P00 = 1;P01 = 0;P02 = 0;P03 = 1;}if (turn==0){step_index++;if (step_index>7) step_index=0; }else{step_index--;if (step_index<0)step_index=7;}}步进电机控制Link - Thu, 17 Jan 2008 12:41:32 +0800Description:本设计采用的步进电机为35BYJ46型四相八拍电机,电压为DC12V。
串口调试助手控制步进电机正反转
串口调试助手控制步进电机正反转#include <reg52.h>#include <stdio.h>#define uchar unsigned char#define uint unsigned intun sig ned char table1[8]={0x08,0x0C,0x04,0x06,0x02,0x03,0x01,0x09}控制电机正传un sig ned char table2[8]={0x09,0x01,0x03,0x02,0x06,0x04,0x0C,0x08}控制电机反转unsigned char ch,step;int t1,t2,a,b;/*串口初始化函数*/void ckinit()TMOD=0X20;TH1=0XFD;TL1=0XFD;/设置波特率为9600TR1 = 1;//启动定时器1SCON=0X50;P CON=OXOO;/设置串口工作方式1}/*控制字符接收函数*/ void SCI_Rev()伸口接收数据uint i=0;while(RI){ch=SBUF;a=ch-96;b=ch-64;RI=0;/*电机延时函数*/ void delay(int n){int i,j;// 延时0.999ms*n12MHZ 晶振for(i=0;i<n;i++){for(j=0;j<120;j++)/*电机正转函数*/ void forward1(){for(t1=512*a;t1>0;t1--){for(step=0;step<8;step++){P1=table1[step];delay(2);if(RI)t1=0;/*电机反转函数*/ void backward1(){for(t2=512*b;t2>0;t2--){for(step=0;step<8;step++){P1=table2[step];if(RI)t2=0;/*电机停止函数*/ void stop(){P1=0xff;delay(100);/*主函数*/ void main(){ckinit();while(1){SCI_Rev();switch(ch){forward1(); ch=0; break;case'b': forward1(); ch=0; break;case'c': forward1(); ch=0; break;case'd': forward1(); ch=0; break;case'A': backward1(); ch=0; break;case'B': backward1(); ch=0; break;backward1(); ch=0; break;case'D': backward1(); ch=0;break;// 正转1 圈// 正转2 圈// 正转3 圈// 正转4 圈// 反转1 圈// 反转2 圈// 反转3 圈// 反转4 圈case'0':stop(); break; default: break;P1=0;}// 停止电机。
步进电机控制(单片机C语言)

步进电机控制(单⽚机C语⾔)模块⼆简单应⽤实例调试任务2 步进电机控制(H22)⼀、任务要求⽤单⽚机P1端⼝控制步进电机,编写程序输出脉冲序列到P1⼝,控制步进电机正转、反转,加速,减速。
⼆、任务⽬的1.了解步进电机控制的基本原理。
2.掌握控制步进电机转动的编程⽅法。
三、电路连线框图步进电机电流⼩于0.5A时可采⽤ULN2003A进⾏驱动(反相)四、原理控制说明步进电机驱动原理是通过对每相线圈中的电流的顺序切换来使电机作步进式旋转。
切换是通过单⽚机输出脉冲信号来实现的。
所以调节脉冲信号的频率便可以改变步进电机的转速,改变各相脉冲的先后顺序,可以改变电机的旋转⽅向。
步进电机的转速应由慢到快逐步加速。
电机驱动⽅式可以采⽤双四拍(AB→BC→CD→DA→AB)⽅式,也可以采⽤单四拍(A→B→C→D→A)⽅式,或单、双⼋拍(A→AB→B→BC→C→CD→D→DA→A)⽅式。
控制时公共端是接在VCC上的,所以实际控制脉冲是低电平有效。
单⽚机的P1⼝输出的脉冲信号经(MC1413或ULN2003A)倒相驱动后,向步进电机输出脉冲信号序列。
五、程序框图# include#define Astep 0x01#define Bstep 0x02#define Cstep 0x04#define Dstep 0x08unsigned char dly_c;void delay(){unsigned char tt,cc;cc = dly_c; //外循环次数tt = 0x0; //内循环次数do{do {}while(--tt);}while(--cc);}void main(){dly_c = 0x10;// 双四拍⼯作⽅式while(1){P1= Astep+Bstep;delay();P1= Bstep+Cstep;delay();P1= Cstep+Dstep;delay();P1= Dstep+Astep;delay();if (dly_c>3) dly_c --; // 加速控制};。
C语言实现控制电机加减速正反转(飞思卡尔C代码)
用单片机控制直流电动机的正反转、加减速的程序如何用C语言写参考一下这个例子吧。
#include<reg52.h>#define uchar unsigned char#define uint unsigned intsbit PW1=P2^0 ;sbit PW2=P2^1 ; //控制电机的两个输入sbit accelerate=P2^2 ; //调速按键sbit stop=P2^3 ; //停止按键sbit left=P2^4 ; //左转按键sbit right=P2^5 ; //右转按键#define right_turn PW1=0;PW2=1 //顺时针转动#define left_turn PW1=1;PW2=0 //逆向转动#define end_turn PW1=1;PW2=1 //停转uint t0=25000,t1=25000; //初始时占空比为50%uint a=25000; // 设置定时器装载初值 25ms 设定频率为20Hz uchar flag=1; //此标志用于选择不同的装载初值uchar dflag; //左右转标志uchar count; //用来标志速度档位void keyscan(); //键盘扫描void delay(uchar z);void time_init(); //定时器的初始化void adjust_speed(); //通过调整占空比来调整速度//**********************************//void main(){time_init(); //定时器的初始化while(1){keyscan(); //不断扫描键盘程序,以便及时作出相应的响应}}//*************************************//void timer0() interrupt 1 using 0{if(flag){flag=0;end_turn;a=t0; //t0的大小决定着低电平延续时间TH0=(65536-a)/256;TL0=(65536-a)%256; //重装载初值}else{flag=1; //这个标志起到交替输出高低电平的作用if(dflag==0){right_turn; //右转}else{left_turn; //左转}a=t1; //t1的大小决定着高电平延续时间TH0=(65536-a)/256;TL0=(65536-a)%256; //重装载初值}}void time_init(){TMOD=0x01; //工作方式寄存器软件起动定时器定时器功能方式1 定时器0TH0=(65536-a)/256;TL0=(65536-a)%256; //装载初值ET0=1; //开启定时器中断使能EA=1; // 开启总中断TR0=0;}//****************************************//void delay(uchar z) //在12M下延时z毫秒{uint x,y;for(x=z;x>0;x--)for(y=110;y>0;y--);}//******************************//void keyscan(){if(stop==0){TR0=0; //关闭定时器0 即可停止转动 end_turn;}if(left==0){TR0=1;dflag=1; //转向标志置位则左转}if(right==0){TR0=1;dflag=0; //转向标志复位则右转}if(accelerate==0){delay(5) ; //延时消抖if(accelerate==0){while(accelerate==0) ; //等待松手count++;if(count==1){t0=20000;t1=30000; //占空比为百分之60}if(count==2){t0=15000;t1=35000; //占空比为百分之70}if(count==3){t0=10000;t1=40000; //占空比为百分之80}if(count==4){t0=5000;t1=45000; //占空比为百分之90}if(count==5){count=0;}}}}功能特点:1)总线速度高达40 M Hz,CAN总线:3个1Mbps的CAN总线,兼容CAN2.0 A/B;2)128 KB程序Flash和8 KB DataFlash,用于实现程序和数据存储,均带有错误校正码(E CC);3)可配置A/D:16通道模数转换器;可选8位10位和12位精度,3μs的转换时间4)内嵌MS CAN模块用于CAN节点应用,内嵌支持LIN协议的增强型SIC模块和SPI模块;5)4通道16位计数器,CRG时钟和复位发生器:锁相环、看门狗、实时中断;增强型捕捉定时器;6)出色的低功耗特性,带有中断唤醒功能的10,实现唤醒休眠系统的功能;7)通道PWM:8位8通道或16位4通道PWM,易于实现电机控制。
控制电机的c语言程序
//水位5
if(shuiman==1&&sw5==0&&sw4==1&&sw3==1&&sw2==1&&sw1==1)//当唯一的闭合一个传感器单元:水位5时发生
{
P0=table[5];//显示水位深度:5
}
//水位4
if(shuiman==1&&sw5==1&&sw4==0&&sw3==1&&sw2==1&&sw1==1)//当唯一的闭合一个传感器单元:水位4时发生
#include<reg51.h>
//定义一个数组,使数码管显示的数字和数组元素的下标相等
unsigned char code table[]={0x3f,0x06,0x5b,0x4f,0x66,
0x6d,0x7d,0x07,0x7f,0x6f};
sbit shuiman=P1^0;//水满
sbit sw5=P1^1;//水位5
{
P0=table[2];//显示水位深度:2
}
//水位低
if(shuiman==1&&sw5==1&&sw4==1&&sw3==1&&sw2==1&&sw1==0)//当唯一的闭合一个传感器单元:水位1时发生
{
dianji=0;//开电机
state=0;//电机工作指示灯打开
P0=table[1];//显示水位深度:1
}
//手工上水
if(shougong==0)//当按手工上水按钮时发生
{
dianji=0;//开电机
步进电机C语言程序

C语言程序清单#include <stdio.h>#include <stdlib.h>#include <conio.h>#include <bios.h>#include <ctype.h>#include <process.h>void dis(void);void key(void);void clear(void);void ccscan(void);void action(void);void putbuf(void);void getkey(void);void delay0(int time);void keyscan(void);void delay1(int time);#define IOY0 0x0C400#define MY8255_A IOY0+0x00*4#define MY8255_B IOY0+0x01*4#define MY8255_C IOY0+0x02*4#define MY8255_MODE IOY0+0x03*4char a[]={0x6d,0x79,0x73,0x77,0x39,0x06,0x5b,0x4f,0x66,0x80};char b[]={0x00,0x09,0x04,0x05};char c[] = {0x10,0x30,0x20,0x60,0x40,0xc0,0x80,0x90};int dir=1;int mode=0;int grd=1;int cc;int n;void main(){int i=0;int j;outp(MY8255_MODE, 0x81);while(1){while((i<=7)&&(i>=0)){while(1){keyscan();if(mode==1) break; key();}if(dir==1) i++;if(dir==0) i--;outp(MY8255_C, c[i]); if(grd==4)for(j=500;j>0;j--) {delay1(0x10); keyscan();}if(grd==3)for(j=1000;j>0;j--) {delay1(0x10); keyscan();}if(grd==2)for(j=3000;j>0;j--) {delay1(0x10); keyscan();}if(grd==1)for(j=5000;j>0;j--){delay1(0x10); keyscan();}key();}if(i>7) i=0;if(i<0) i=7;}}void delay1(int time){int i;int j;for(i=0;i<=time;i++){for(j=0;j<=0x700;j++){ }}return;}void keyscan(){dis();clear();ccscan();if (cc){dis();delay0(0x100);delay0(0x100);clear();ccscan();if (cc){getkey();putbuf();}}key();}void getkey(void){int i;int j = 0xfe;for(i=0;i<=3;i++){outp(MY8255_A, j);if ( !( (inp(MY8255_C)) & 0x01) ) {n = i + 0;action();return;}if ( !( (inp(MY8255_C)) & 0x02) ) {n = i + 4;action();return;}if ( !( (inp(MY8255_C)) & 0x04) ) {n = i + 8;action();return;}if ( !( (inp(MY8255_C)) & 0x08) ) {n = i + 12;action();return;}j <<= 1;}}void ccscan(void){outp(MY8255_A, 0x00);cc = inp(MY8255_C);cc = (~cc) & 0x0F;}void dis(void){int i;int j = 0xf7;for(i=3;i>=0;i--){outp(MY8255_A, j);outp(MY8255_B, a[b[i]]); delay0(0x100);j >>= 1;j |= 0x80;}}void clear(void){outp(MY8255_B, 0x00);}void action(void){if(n==0){if(dir==1) dir=0; else dir=1;}if(n==1){if(mode==1) mode=2; else mode=1;}if(n==2){dir=1;mode=0;grd=1;}if(n==4) grd=1;if(n==5) grd=2;if(n==6) grd=3;if(n==7) grd=4;}void putbuf(void){b[0]=mode;b[2]=dir+3;b[3]=grd+4;dis();clear();ccscan();while (cc){dis();clear();ccscan();}}void key(void){if (bioskey(1) != 0){exit(0);}}void delay0(int time){int i;int j;for(i=0;i<=time;i++){for(j=0;j<=0x100;j++) { }}return;}。
步进电机控制程序(c语言51单片机)
// pri_dj = Pme );
if( i == set_pwm_width ) { P1 = 0xff; i = 0; one _round_flg = 0; while ( !one_round_flg & key_puse );}
if(!key_puse) { delay(4ms); if(!key_puse) break; }
while ( key_puse & key_clear ); delay ( 8ms );
if ( !key_clear ) { round_num = 0; display(); }
if ( !key_puse ) break; }
while( !key_puse ); delay(8ms);
while( !key_puse ); }
set_display_num(); for(i = 0; i < LEDLen ; i ++){
P0 = 0xf0; P0 = P0 | LEDBuf[i] ; if(i==0) led_1000 = 0; //P0^4 if(i==1) led_100 = 0; //P0^5 if(i==2) led_10 = 0; //P0^6 if(i==3) led_1 = 0; //P0^7
delay ( 1ms ); tmp = (~(P2 | 0xF0)); P2 = 0x7F; // 0111 1111
delay ( 1ms ); tmp = (~(P2 | 0xF0)) * 10 + tmp; set_round_num = set_round_num + tmp * 100; set_round_num = set_round_num * Chilun_Num;
电机正反转简单程序

电机正反转简单程序引言电机正反转是在许多电气控制和机器人领域中常见的需求。
通过编写简单的程序,我们可以实现对电机的正向和反向旋转控制。
本文将介绍如何编写一个简单的程序来实现电机的正反转。
什么是电机正反转?在控制电机时,正反转是指改变电机的旋转方向。
电机正转是指电机按照设定的方向进行旋转,而电机反转则是电机按照相反的方向进行旋转。
通过控制电机的正反转,我们可以实现精确的运动控制和机器人运动的调整。
电机正反转的原理电机正反转的实现原理基于电机的构造和控制电路。
常见的电机类型包括直流电机和交流电机。
无论是直流电机还是交流电机,它们的正反转控制原理都是通过控制电极之间的电流流向来实现的。
在直流电机中,通过改变直流电源的电极连接方式,可以改变电流在电机绕组中的流向,从而改变电机的旋转方向。
在交流电机中,可以通过改变电机的相序来改变绕组中电流的流向,进而改变旋转方向。
编写电机正反转程序的步骤编写电机正反转程序的步骤主要包括以下几个方面:1. 确定电机类型和控制方式首先,我们需要确定使用的电机类型和控制方式。
根据不同的电机类型和控制方式,编写电机正反转程序的方法会有所不同。
例如,直流电机的正反转控制需要改变电机电极的连接方式,而交流电机的正反转控制需要改变电机的相序。
2. 确定控制电路和接口在编写程序之前,我们需要确定控制电路和接口。
控制电路和接口用于将控制信号传输到电机,从而实现对电机正反转的控制。
常见的电机控制电路和接口包括H桥电路、驱动模块和微控制器。
3. 编写程序根据电机类型和控制方式,我们可以编写相应的程序。
程序的主要任务是向电机发送控制信号以实现正反转。
在编写程序时,需要根据电机的规格和特性设置合适的参数,如电机转速、转向等。
4. 测试和调试完成程序编写后,我们需要进行测试和调试,以确保程序能够正常运行。
在测试和调试过程中,我们可以通过观察电机的转动方向和速度来验证程序的正确性。
如果程序存在问题,可以对程序进行调试和修改。
利用置位复位指令编写电动机正反转的程序
利用置位复位指令编写电动机正反转的程序下面是一个使用置位和复位指令编写电动机正反转程序的示例:```c#include <stdio.h>#include <stdlib.h>#define MOTOR_PIN1 1 // 电机引脚1#define MOTOR_PIN2 2 // 电机引脚2// 设置引脚状态为高电平void setPinHigh(int pin) {printf("Set Pin %d High\n", pin);// 在这里写入设置引脚为高电平的代码}// 设置引脚状态为低电平void setPinLow(int pin) {printf("Set Pin %d Low\n", pin);// 在这里写入设置引脚为低电平的代码}// 正转函数void forward() {setPinHigh(MOTOR_PIN1);setPinLow(MOTOR_PIN2);// 在这里可以加入延时,控制电机正转的时间}// 反转函数void reverse() {setPinLow(MOTOR_PIN1);setPinHigh(MOTOR_PIN2);// 在这里可以加入延时,控制电机反转的时间}// 停止函数void stop() {setPinLow(MOTOR_PIN1);setPinLow(MOTOR_PIN2);}int main() {// 正转示例printf("Forward\n");forward();// 延时一段时间// 在这里写入延时代码,用于控制电机正转的时间 stop(); // 停止电机// 反转示例printf("Reverse\n");reverse();// 延时一段时间// 在这里写入延时代码,用于控制电机反转的时间stop(); // 停止电机return 0;}```上述示例中,我们使用了 `setPinHigh` 和 `setPinLow` 函数来设置电机引脚的状态。
步进电机驱动程序C语言
/*************************************************************************************** ;步进电机驱动程序;步进电机型号:70BC340-D ,步距角1.5/3***************************************************************************************** ****/#include <A T892051.H>#define uchar unsigned char#define uint unsigned int#define ulong unsigned longsbit dj_a = P1^0;sbit dj_b = P1^1;sbit dj_c = P1^2;sbit gd_s = P3^3;sbit key_s = P3^4;sbit key_j = P3^5;sbit dog = P3^0;uchar bdata flg;sbit s_bit = flg^0;sbit j_bit = flg^1;uchar data bzjs=0; //计时单元uchar data dqdjbz=0; //当前电机步骤uchar data djzt=0; //电机状态01==升10==降00==保uchar data dqdjabc=0x06;uchar data key=0x30; //键值//定时单元uchar data sh=0;uchar data sl=0;//脉冲宽度uchar code s_sj=5; // 升时每拍时间为5毫秒uchar code j_sj=7; // 降时每拍时间为7毫秒//电机步骤代码uchar code dj[6]={0x06,0x04,0x05,0x01,0x03,0x02};//===================================================void delay10ms(void){uchar i,j;for(i=0;i<12;i++){for(j=0;j<200;j++){dog = ~dog;}}}void timer0() interrupt 1 {TH0=sh; //TL0=sl;if(s_bit){bzjs++;if(bzjs>(s_sj-1)){bzjs = 0;dqdjbz++;if(dqdjbz>5){dqdjbz = 0;}djzt = 0x01;dqdjabc = dj[dqdjbz];}}if(j_bit){bzjs++;if(bzjs>(j_sj-1)){bzjs = 0;if(dqdjbz>0){dqdjbz--;}else{dqdjbz = 5;}djzt = 0x10;dqdjabc = dj[dqdjbz];}}if((s_bit==0)&&(j_bit==0)){bzjs = 0;if(djzt==0x01){switch(dqdjbz){case 1:dqdjbz = 2;break;case 3:dqdjbz = 4;break;case 5:dqdjbz = 0;break;}}if(djzt==0x10){switch(dqdjbz){case 1:dqdjbz = 0;break;case 3:dqdjbz = 2;break;case 5:dqdjbz = 4;break;}}djzt = 0;dqdjabc = dj[dqdjbz];djzt = 0x00;}P1 = dqdjabc;}void main(void){P1 = 0xff;P3 = 0xff;TMOD = 0x11;TH0 = 0xfc;TL0 = 0x73;TR0 = 1;ET0 = 1;dqdjbz = 0x00;P1 = 0x06;dqdjabc = 0x06;flg = 0;EA = 1;while(1){key = P3 & 0x30;if(key != 0){delay10ms();key = P3 & 0x30;//key = 0x20;}switch(key){case 0x20:s_bit = 1;j_bit = 0;break;case 0x10:j_bit = 1;s_bit = 0;break;case 0x30:s_bit = 0;j_bit = 0;break;}if(gd_s){sh = 0xfc; //1毫秒sl = 0x7b;}else{sh = 0xf8; //2毫秒sl = 0xe0;}}}。
51单片机控制步进电机硬件图及C语言编程
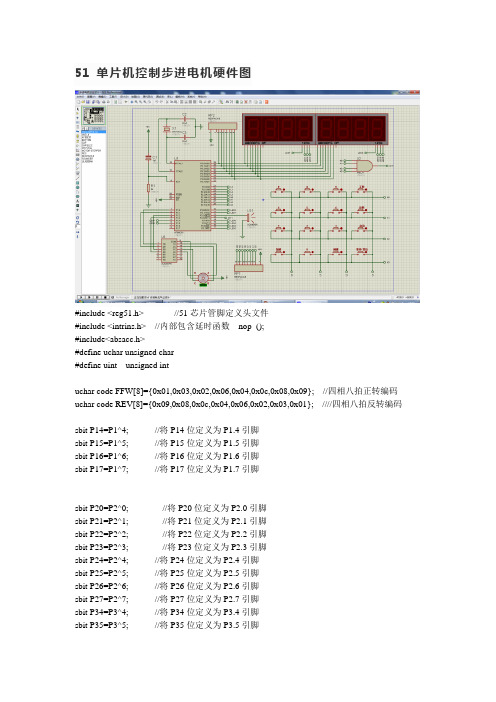
51单片机控制步进电机硬件图#include <reg51.h> //51芯片管脚定义头文件#include <intrins.h> //内部包含延时函数_nop_();#include<absacc.h>#define uchar unsigned char#define uint unsigned intuchar code FFW[8]={0x01,0x03,0x02,0x06,0x04,0x0c,0x08,0x09}; //四相八拍正转编码uchar code REV[8]={0x09,0x08,0x0c,0x04,0x06,0x02,0x03,0x01}; ////四相八拍反转编码sbit P14=P1^4; //将P14位定义为P1.4引脚sbit P15=P1^5; //将P15位定义为P1.5引脚sbit P16=P1^6; //将P16位定义为P1.6引脚sbit P17=P1^7; //将P17位定义为P1.7引脚sbit P20=P2^0; //将P20位定义为P2.0引脚sbit P21=P2^1; //将P21位定义为P2.1引脚sbit P22=P2^2; //将P22位定义为P2.2引脚sbit P23=P2^3; //将P23位定义为P2.3引脚sbit P24=P2^4; //将P24位定义为P2.4引脚sbit P25=P2^5; //将P25位定义为P2.5引脚sbit P26=P2^6; //将P26位定义为P2.6引脚sbit P27=P2^7; //将P27位定义为P2.7引脚sbit P34=P3^4; //将P34位定义为P3.4引脚sbit P35=P3^5; //将P35位定义为P3.5引脚sbit P36=P3^6; //将P36位定义为P3.6引脚sbit P37=P3^7; //将P37位定义为P3.7引脚sbit P30=P3^0; //将P30位定义为P3.0引脚sbit P31=P3^1; //将P31位定义为P3.1引脚sbit BEEP=P3^2; // 蜂鸣器bit on=0;bit off=1; //运行与停止标志bit zdirection=0; //方向标志bit fdirection=0; //方向标志uchar h,l,k; //定义行键值//定义列键值uchar idata count[3]; //0-9数值储存unsigned char code Tab[ ]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90}; //数字0~9的段码uchar keyval=0; //定义变量储存按键值uchar dat=0; //按键值uint run_i=0;uchar count_i=0;uint run=0; //需要运行的步数uint drun=0; //当前运行的步数bit flag;uint x=60;uint y=60;uint z=0;/* uint k=0; //调速按键次*//**************************************************************/ void led_delay1(void){unsigned char j;for(j=0;j<52;j++);}void beep(){uchar j;for (j=0;j<200;j++){led_delay1();BEEP=!BEEP; //BEEP取反}BEEP=1; //关闭蜂鸣器}/**************************************************************函数功能:数码管动态扫描延时**************************************************************/void led_delay(void){unsigned char j;for(j=0;j<200;j++);}/**************************************************************/**************************************************************函数功能:软件延时去抖动子程序**************************************************************/void delay20ms(void){unsigned char i,j;for(i=0;i<70;i++)for(j=0;j<60;j++);}void display(uint run){ //显示设点步数P31=1; //点亮数码管DS6P30=0;P34=0;P35=0;P36=0;P37=0;P14=0;P15=0;if((run/100)!=0){ P0=Tab[run/100]; //显示百位led_delay(); //动态扫描延时led_delay(); //动态扫描延时}P0=0xff;P30=1;P31=0;P34=0;P36=0;P37=0;P14=0;P15=0;if(((run%100/10)==0)&&(run/10==0)) { P0=0xff;led_delay(); //动态扫描延时led_delay();} //点亮数码管DS5else{ P0=Tab[run%100/10]; //显示十位led_delay(); //动态扫描延时led_delay(); //动态扫描延时}P0=0xff;P37=1; //点亮数码管DS4P30=0;P34=0;P35=0;P36=0;P31=0;P14=0;P15=0;if((run/10==0)&&(run%100/10==0)&&(run%10==0)){ P0=0xff;led_delay(); //动态扫描延时led_delay(); //动态扫描延时}else{ P0=Tab[run%10]; //显示个位led_delay(); //动态扫描延时led_delay(); //动态扫描延时}P0=0xff;}/*********************************************************************/void ddisplay(uint drun){ //显示运行步数P36=1; //点亮数码管DS3P30=0;P34=0;P35=0;P31=0;P37=0;P15=0;if((drun/100)!=0){P0=Tab[drun/100]; //显示百位led_delay(); //动态扫描延时led_delay(); //动态扫描延时}P0=0xff;P35=1; //点亮数码管DS2P30=0;P34=0;P31=0;P36=0;P37=0;P14=0;P15=0;if(((drun%100/10)==0)&&(drun/10==0)) { P0=0xff;led_delay(); //动态扫描延时led_delay();}//点亮数码管DS5else{ P0=Tab[drun%100/10]; //显示十位led_delay(); //动态扫描延时led_delay(); //动态扫描延时}P0=0xff;P34=1; //点亮数码管DS1P30=0;P31=0;P35=0;P36=0;P37=0;P14=0;P15=0;if((drun/10==0)&&(drun%100/10==0)&&(drun%10==0)){ P0=0xff;led_delay(); //动态扫描延时led_delay(); //动态扫描延时}else{ P0=Tab[drun%10]; //显示个位led_delay(); //动态扫描延时led_delay(); //动态扫描延时}P0=0xff;}void dddisplay(){ P15=1;P36=0;P30=0;P34=0;P35=0;P31=0;P37=0;P14=0;if((fdirection==1)&&(on==1)){P0=0xbf; led_delay(); led_delay(); }P0=0xff;P14=1;P36=0;P30=0;P34=0;P35=0;P31=0;P37=0;P15=0;if(y==60){P0=0x08;led_delay(); led_delay();}if(y==50){P0=0x03; led_delay(); led_delay(); }if(y==40){P0=0x46; led_delay(); led_delay();}if(y==30){P0=0x21 ;led_delay(); led_delay();}if(y==20){P0=0x86; led_delay(); led_delay(); }if(y==10){P0=0x8e; led_delay(); led_delay();}P0=0xff;}/************************************************************** 函数功能:主函数**************************************************************/ void main(void){ x=60;P14=0;P15=0;P16=0;P17=0;EA=1;EX1=1; //允许使用外中断IT1=1; //选择负跳变来触发外中断PT0=1;ET0=1; //定时器T0中断允许TMOD=0x01; //使用定时器T0的模式1TH0=0xec; //定时器T0的高8位赋初值TL0=0x78; //定时器T0的低8位赋初值TR0=1;P30=1; //启动定时器T0P34=1;P35=1;P36=1;P37=1;P31=1;P2=0xf0;while(1){if(flag){P2=0x0f; h=P2&0x0f; //所有行线置为高电平"1",所有列线置为低电平"0",并把值给hif((P2&0x0f)!=0x0f) //行线中有一位为低电平"0",说明有键按下delay20ms(); //延时一段时间、软件消抖else {keyval=16;}if(h!=0x0f) //确实有键按下{h=P2&0x0f; //读取行值P2=0xf0; //反转电位l=P2&0xf0; //读取列值k=h+l; //行列相加,为键位值if(k==0x7e) keyval=12;if(k==0x7d) keyval=0;if(k==0x7b) keyval=13;if(k==0x77) keyval=15;if(k==0xbe) keyval=1;if(k==0xbd) keyval=2;if(k==0xbb) keyval=3;if(k==0xb7) keyval=14; //键位与设定对应if(k==0xde) keyval=4;if(k==0xdd) keyval=5;if(k==0xdb) keyval=6;if(k==0xd7) keyval=11;if(k==0xee) keyval=7;if(k==0xed) keyval=8;if(k==0xeb) keyval=9;if(k==0xe7) keyval=10;}else keyval=16;dat=keyval;if((dat==10)&&(run!=0)) //正转键按下{zdirection=1; //方向标志fdirection=0;on=1; //运行与停止标志off=0;}if((dat==11)&&(run!=0)) //反转键按下{fdirection=1; //方向标志zdirection=0;on=1; //运行与停止标志off=0;}if(dat==12) //加速键{if(y==10) y=10;else y=y-10;}if(dat==13) //减速键{if(y==60) y=y;else y=y+10;}if((dat==14)&&(run!=0)) //开始键按下{ if(z==1) {on=1;}elseon=1;off=0;z=0;if((zdirection==0)&&(fdirection==0)){zdirection=1;}}if(dat==15) { z++;on=0; } //停止键按下一次if((on==0)&&(z==2)) //停止键按下二次{count[0]=0; //显示清零count[1]=0;count[2]=0;drun=0; run=0;z=0;on=0;off=1; //运行与停止标志}if((dat>=0)&&(dat<=9)&&(on==0)&&(off==1)){count[count_i]=dat;if(count[0]!=0){count_i++;}if((count_i==3)&&(on==0)&(off==1)){count_i=0;}if((count_i==0)&&(on==0)&(off==1)){ if(count[0]==0)run=0;else run=count[0]*100+count[1]*10+count[2];}if((count_i==1)&&(on==0)&(off==1)){run=count[0];}if((count_i==2)&&(on==0)&(off==1)){run=count[0]*10+count[1];}}if((dat==0)&&(on==1)){off=1;}if(dat==16);flag=0;}/*if(run!=0){*/ddisplay(drun);dddisplay();display(run);/*} */ //调用按键值的数码管显示子程序if((run==drun)&&run!=0){on=0;off=1;beep();drun=0; run=0;count[0]=0; //显示清零count[1]=0;count[2]=0;count_i=0;}}}/**************************************************************外部中断键盘扫描键值保存在dat中******************************************************************************* ************/void Interrupt1() interrupt 2 using 3{flag=1;}/*************************************************************************/ void Interrupt2() interrupt 1 using 1{ TR0=0;EX1=1;TH0=0xec;TL0=0x78;x--;if(x==0){if((zdirection==1)&&(fdirection==0)&&(on==1)&&(off==0)){P1=FFW[run_i];fdirection=0;led_delay(); //动态扫描延时led_delay(); //动态扫描延时led_delay(); //动态扫描延时led_delay(); //动态扫描延时drun++;run_i++;if(run_i==8)run_i=0;if(run==drun){on=0;off=1;}}if((zdirection==0)&&(fdirection==1)&&(on==1)&&(off==0)){P1=REV[run_i];led_delay(); //动态扫描延时led_delay(); //动态扫描延时led_delay(); //动态扫描延时led_delay(); //动态扫描延时zdirection=0;drun++;run_i++;if(run_i==8)run_i=0;if(run==drun){on=0;off=1;}}if((on==0)&&(off=1))P1=0x00; x=y;}TR0=1;}。
我的51单片机之 步进电机 的 C语言与汇编的编程
ORG 0000H AJMP MAIN ORG 0030H
ForKey EQU P3.2; BackKey EQU P3.3;
A1 EQU P2.0; B1 EQU P2.1; C1 EQU P2.2; D1 EQU P2.3;
Speed EQU 40H;
;八拍方式驱动,顺序为 A AB B BC C CD D DA MAIN: START:
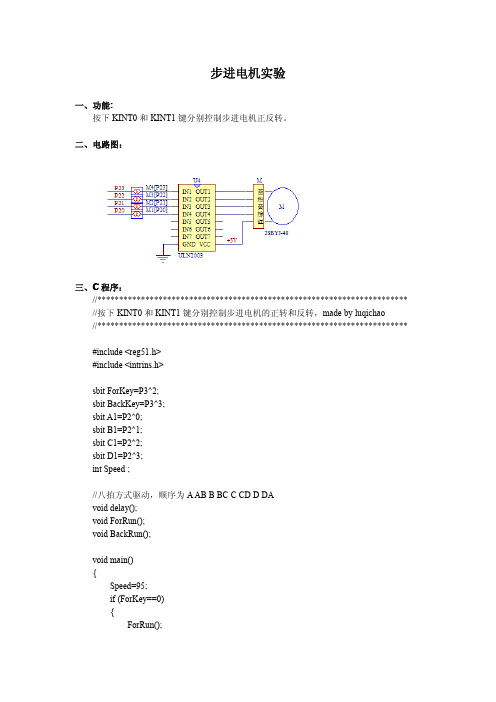
步进电机实验
一、功能: 按下 KINT0 和 KINT1 键分别控制步进电机正反转。
二、电路图:
三、C 程序: //*********************************************************************** //按下 KINT0 和 KINT1 键分别控制步进电机的正转和反转,made by luqichao //***********************************************************************
}
void BackRun() {
D1=1; B1=C1=A1=0; delay(); D1=C1=1; A1=B1=0; delay(); C1=1; A1=B1=D1=0; delay(); C1=B1=1; A1=D1=0; delay(); B1=1; A1=C1=D1=0; delay(); B1=A1=1; C1=D1=0; delay(); A1=1; D1=B1=C1=0; delay(); A1=D1=1; B1=C1=0; delay(); }
控制步进电机正反转的加减速程序程序
控制步进电机正反转的加减速程序程序#include#define KeyPort P1#define DataPort P0 //定义数据端口程序中遇到DataPort 则用P0 替换sbit LATCH1=P2^4;//定义锁存使能端口段锁存sbit LATCH2=P0^0;// 位锁存unsigned char code dofly_DuanMa[10]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f};// 显示段码值0~9unsigned char code dofly_WeiMa[]={0xfe,0xfd,0xfb,0xf7,0xef,0xdf,0xbf,0x7f};//分别对应相应的数码管点亮,即位码unsigned char TempData[8]; //存储显示值的全局变量sbit A1=P2^0; //定义步进电机连接端口sbit B1=P2^1;sbit C1=P2^2;sbit D1=P2^3;#define Coil_AB1 {A1=1;B1=1;C1=0;D1=0;}//AB相通电,其他相断电#define Coil_BC1 {A1=0;B1=1;C1=1;D1=0;}//BC相通电,其他相断电#define Coil_CD1 {A1=0;B1=0;C1=1;D1=1;}//CD相通电,其他相断电#define Coil_DA1 {A1=1;B1=0;C1=0;D1=1;}//DA相通电,其他相断电#define Coil_A1 {A1=1;B1=0;C1=0;D1=0;}//A相通电,其他相断电#define Coil_B1 {A1=0;B1=1;C1=0;D1=0;}//B相通电,其他相断电#define Coil_C1 {A1=0;B1=0;C1=1;D1=0;}//C相通电,其他相断电#define Coil_D1 {A1=0;B1=0;C1=0;D1=1;}//D相通电,其他相断电#define Coil_OFF {A1=0;B1=0;C1=0;D1=0;}//全部断电unsigned char Speed=1;bit StopFlag;void Display(unsigned char FirstBit,unsigned char Num);void Init_Timer0(void);unsigned char KeyScan(void);/*------------------------------------------------uS延时函数,含有输入参数 unsigned char t,无返回值unsigned char 是定义无符号字符变量,其值的范围是0~255 这里使用晶振12M,精确延时请使用汇编,大致延时长度如下 T=tx2+5 uS------------------------------------------------*/void DelayUs2x(unsigned char t){while(--t);}/*------------------------------------------------mS延时函数,含有输入参数 unsigned char t,无返回值unsigned char 是定义无符号字符变量,其值的范围是0~255 这里使用晶振12M,精确延时请使用汇编------------------------------------------------*/void DelayMs(unsigned char t){while(t--){//大致延时1mSDelayUs2x(245);DelayUs2x(245);}}/*------------------------------------------------主函数------------------------------------------------*/main(){unsigned int i=512;//旋转一周时间unsigned int n=0;unsigned char num,vo,v;Init_Timer0();Coil_OFF;while(1) //正向{num=KeyScan(); //循环调用按键扫描if(num==1)//第一个按键,速度等级增加{if(Speed<15)Speed=Speed+2;//+8}if(num==2)//第二个按键,速度等级减小{if(Speed>1)Speed=Speed-2;//-8}if(num==3)//第三个按键,电机停转{Coil_OFFStopFlag=1;}if(num==4)//第四个按键,电机启动{StopFlag=0;TR0=1;}if(num==5)//第五个按键,电机反转{TR0=0;TR1=1;}if(num==6)//第六个按键,电机正传{TR0=1;TR1=0;}vo=(0.25*(20-Speed)*64*32)/1000;v=60/vo;TempData[0]=dofly_DuanMa[v/10]; //分解显示信息,如要显示68,则68/10=6 68%10=8TempData[1]=dofly_DuanMa[v%10];}}/*------------------------------------------------显示函数,用于动态扫描数码管输入参数 FirstBit 表示需要显示的第一位,如赋值2表示从第三个数码管开始显示如输入0表示从第一个显示。