永磁同步直线电机的数学建模
永磁同步电动机(PMSM)三相坐标系的数学模型
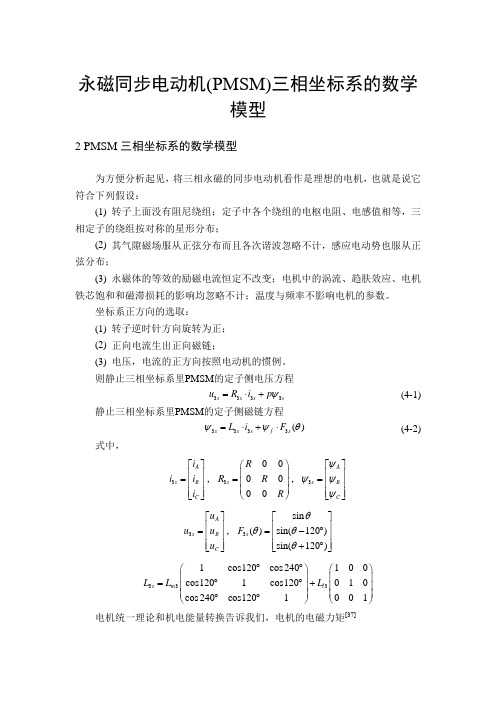
永磁同步电动机(PMSM)三相坐标系的数学模型2 PMSM 三相坐标系的数学模型为方便分析起见,将三相永磁的同步电动机看作是理想的电机,也就是说它符合下列假设:(1) 转子上面没有阻尼绕组;定子中各个绕组的电枢电阻、电感值相等,三相定子的绕组按对称的星形分布;(2) 其气隙磁场服从正弦分布而且各次谐波忽略不计,感应电动势也服从正弦分布;(3) 永磁体的等效的励磁电流恒定不改变;电机中的涡流、趋肤效应、电机铁芯饱和和磁滞损耗的影响均忽略不计;温度与频率不影响电机的参数。
坐标系正方向的选取: (1) 转子逆时针方向旋转为正; (2) 正向电流生出正向磁链;(3) 电压,电流的正方向按照电动机的惯例。
则静止三相坐标系里PMSM 的定子侧电压方程3333s s s s u R i p ψ=⋅+ (4-1)静止三相坐标系里PMSM 的定子侧磁链方程3333()s s s f s L i F ψψθ=⋅+⋅ (4-2) 式中,3A s B C i i i i ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦,3000000s R R R R ⎛⎫ ⎪=⎪ ⎪⎝⎭,3A s B C ψψψψ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦ 3A s B C u u u u ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦,3sin ()sin(120)sin(120)s F θθθθ⎡⎤⎢⎥=-︒⎢⎥⎢⎥+︒⎣⎦3331cos120cos 240100cos1201cos120010cos 240cos1201001s m l L L L ︒︒⎛⎫⎛⎫⎪ ⎪=︒︒+ ⎪ ⎪ ⎪ ⎪︒︒⎝⎭⎝⎭电机统一理论和机电能量转换告诉我们,电机的电磁力矩[37]*I m ()s s e p T n i ψ=- (4-3) 式中,*代表取共轭复数,Im 代表取虚部。
3 PMSMdq 坐标系的数学模型三相交流电机是一个耦合强、非线性、阶次高的多变量系统,它在三相静止的坐标系里的数学模型相当复杂,应用传统的控制策略对其实现交流调速有很大的困难,所以对于一般的三相交流电机常常应用矢量控制的方法,采用坐标变换,把三相交流的绕组等效变换成两相互相垂直的交流绕组或者旋转的两相直流的绕组,等效变换以后其产生的磁动势相等,系统的变量之间得到了部分的解耦,它的数学模型得到了大大简化,使得对于系统的分析和控制也简化了很多,使得它的数学模型与比较简单的直流电机类似[52]。
永磁同步直线伺服电机机电动力学模型的建立与仿真
2 永磁 同步直线伺服 电机 的机 电动力 学模型 :
在建立永磁 同步伺服直线电机数学模型之前 , 做如下假设 :
a . 忽略铁 心饱 和 ; b . 不 计涡 流 和磁 滞 损耗 ;
C . 动子上没有阻尼绕组 , 永磁体也没有阻尼作用; d .电动 势是 正
基金项 目: 内蒙古工业大学科学研究项 目( Z S 2 0 1 l l 5 )
作者简介 : 闫军( 1 9 7 4~) , 男, 研究方 向: 机 电动力学 。
1 l 2
内蒙古工 业大学学报
2 0 1 3年
不 变 。直线 电机 可 以是 短初 级长 次级 , 也 可 以是 长初 级短 次级 。
f
丢 ( 老 ) 一 + 差 + 差= 吲1 ‘ , 2 , - - - , m )
d( O L)
一
+
l ' 2 , …
拉格 朗 日函数 和耗 散 函数为 :
r
L=r ( q j , ) 一V ( q j ) + ( , e )一 ( , e )
闫 军 , 周 志 霞 , 武建新‘
(1 .内蒙古工业 大学 机械学院 呼和浩特 0 1 0 0 5 1 ; 2 .内蒙古工业大学 电力学 院 , 呼和浩特 0 1 0 0 5 1)
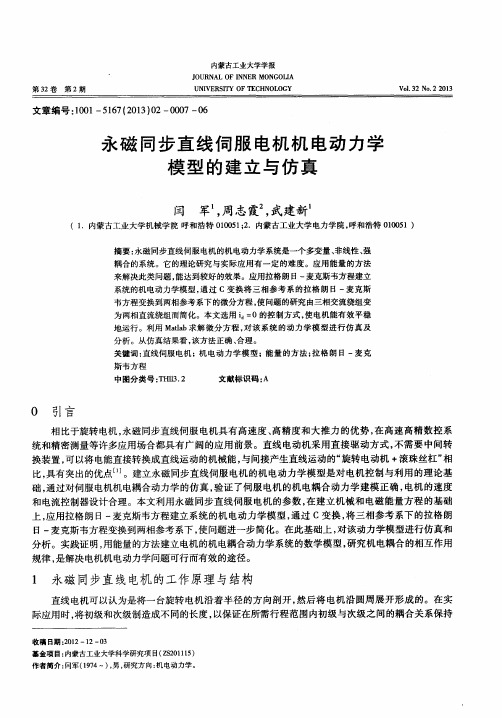
摘要: 永磁 同步 直线 伺服电机的机 电动力学系统是一个 多变量 、 非线性 、 强
耦 合的系统 。它 的理论研究 与实际应 用有一定 的难 度。应用 能量 的方 法 来解 决此类 问题 , 能达到较好的效果 。应用拉格朗 1 3一 麦克斯 韦方程建立 系统 的机电动力学模型 , 通 过 c变换将 三相 参考 系 的拉 格 朗 日 一麦克 斯
原理 结构 图如 图 1 所示。
永磁同步直线电机数学模型
永磁同步直线电机数学模型永磁同步直线电机是一种应用于直线运动控制系统的新型电机。
它具有高效率、高精度、高刚度和快速响应的特点,广泛应用于工业自动化、高速列车、机床、印刷、数控机床、半导体设备等领域。
永磁同步直线电机的数学模型是描述其运动规律的数学表达式。
通过建立数学模型,可以分析和预测电机的性能,并设计出最优的控制策略。
永磁同步直线电机的数学模型主要包括动态模型和静态模型两部分。
动态模型描述了电机的运动状态和响应特性。
它基于牛顿第二定律和电机动态方程建立,考虑了电机的负载惯性、摩擦力和电磁力等因素。
动态模型可以用于分析电机的加速度、速度和位置等动态性能。
静态模型描述了电机的静态特性。
它基于电机的静态平衡方程建立,考虑了电机的电磁力、重力和摩擦力等因素。
静态模型可以用于分析电机的静态力学性能,如电机的负载能力和刚度等。
在建立永磁同步直线电机的数学模型时,需要考虑电机的结构参数、电磁参数和控制参数等因素。
结构参数包括电机的长度、宽度和高度等几何尺寸,电磁参数包括电机的磁极数、电流和磁链等参数,控制参数包括电机的控制电流和控制电压等参数。
根据实际应用需求,可以对模型进行简化或者增加更多的参数,以提高模型的准确性和适用性。
通过数学模型,可以对永磁同步直线电机的性能进行分析和优化。
例如,可以通过模型预测电机的响应时间、稳态误差和精度等指标,在设计过程中选择合适的结构参数和控制参数,以实现最佳性能。
此外,还可以通过模型分析电机的负载能力和刚度,评估电机在不同工况下的可靠性和稳定性。
永磁同步直线电机的数学模型是分析和设计电机的重要工具。
通过建立准确的数学模型,可以深入理解电机的运动规律和特性,为电机的应用和控制提供有效的指导。
同时,也可以通过模型优化电机的性能,提高电机的效率和精度,满足不同领域和应用的需求。
永磁同步电机的模型和方法ppt课件
线重合, β轴超前α 轴90度,在α 、 β 、o坐标系中的电压电流,
可以直接从A 、B、C三相坐标系中的电压电流通过简单的线性
变换可以得到。一个旋转矢量从A 、B、C三相定子坐标系变换
到α 、 β 、o坐标系成为3/2变换,有
• 经过变换后得到α 、 β 、o坐标系的电压方
围。
• 力矩平衡方程式为:
• − =
+
• 从上述分析可以看出在d 、q、0坐标系下的
数学模型简单的多,方便控制
• 根据电机的数学模型,可以将永磁同步电
机简化为如图所示的d,q轴模型。永磁同
步电机的转矩方程表示发电机的电磁转矩
可以通过控制定子电流的d,q轴分量进行
控制。
程为:
• α 、 β 、o坐标系的磁链方程为:
• 其中:Ld、Lq分别是同步电机直轴交轴电感;
为永磁极产生的与定子绕组交链的磁链
在α 、 β 、o坐标系中,经过线性变换使A 、
B、C三相坐标系中的电机数学模型方程得到一定
简化。针对内永磁同步电机,因为转子的直、交
轴的不对称而具有凸极效应,因此在α 、 β 、o
永磁同步发电机控制策略
• 永磁同步发电机常用的矢量控制策略有:
(1)isd=0 控制;
• (2)最大转矩电流比控制:
• (3)单位功率因数控制;
• (4)最小损耗控制等。
• 每种控制策略都有其优缺点,于是针对永
磁同步电机不同控制目标下的矢量控制策
略进行比较分析。
• 2.1 id=0电流控制
• id=0的控制称为磁场定向控制,这种控制
永磁同步直线电机的数学模型分析

舰 船 电 子 工 程
S i e t o i E g n e ig h p Elc r n c n i e rn
Vo . O No 9 13 .
1O 2
永 磁 同步 直 线 电机 的 数 学模 型 分 析
余凤 豪 吕 飞 张松 涛
c n r l d me e .Th i l ma h ma ia d l sr f r n e p r o e f r f r h ra p o c . o t o l mb r e e smp e te t l c mo e e e e c u p s o u t e p r a h i Ke o d P S yW r s M LM ,e d e f c ,ma h ma ia d l o p e n fe t te t l c mo e ,c u l Cls m b r TM ] a s Nu e 5
A
置 的 函数 。
r
跏
电枢
;
q 轴
铁轨
:
!
\ : / : 、 磁 体 永
图 1 P S 的结 构 模 型 ML M
如 图 2 示 , 设 动子 在 z处 时 , 所 假 d轴 与 a轴
合 成行波磁 场 的 角 速 度 。若 z一0时 , d轴 与 a 轴 的初始夹 角为 ( 电气 角 ) 假 设磁 极 沿 直线 均 匀 ,
蚌埠
吉
哲
( 军 蚌 埠 士 官 学 校机 电 系 海 摘
一
231) 30 2
要
文 章 推 导 了永 磁 同步 直 线 电 机 ( ML M) 磁 链 方 程 、 P S 的 电压 方 程 和 电磁 推 力 方 程 , 到永 磁 同步 直 线 电 机 是 得
永磁同步电机基础知识

(一) PMSM 的数学模型交流电机是一个非线性、强耦合的多变量系统。
永磁同步电机的三相绕组分布在定子上,永磁体安装在转子上。
在永磁同步电机运行过程中,定子与转子始终处于相对运动状态,永磁体与绕组,绕组与绕组之间相互影响,电磁关系十分复杂,再加上磁路饱和等非线性因素,要建立永磁同步电机精确的数学模型是很困难的。
为了简化永磁同步电机的数学模型,我们通常做如下假设:1) 忽略电机的磁路饱和,认为磁路是线性的;2) 不考虑涡流和磁滞损耗;3) 当定子绕组加上三相对称正弦电流时,气隙中只产生正弦分布的磁势,忽略气隙中的高次谐波;4) 驱动开关管和续流二极管为理想元件;5) 忽略齿槽、换向过程和电枢反应等影响。
永磁同步电机的数学模型由电压方程、磁链方程、转矩方程和机械运动方程组成,在两相旋转坐标系下的数学模型如下:(l)电机在两相旋转坐标系中的电压方程如下式所示:d d s d d c q q q s q q c d di u R i L dt di u R i L dt ωψωψ⎧=+-⎪⎪⎨⎪=++⎪⎩其中,Rs 为定子电阻;ud 、uq 分别为d 、q 轴上的两相电压;id 、iq 分别为d 、q 轴上对应的两相电流;Ld 、Lq 分别为直轴电感和交轴电感;ωc 为电角速度;ψd 、ψq 分别为直轴磁链和交轴磁链。
若要获得三相静止坐标系下的电压方程,则需做两相同步旋转坐标系到三相静止坐标系的变换,如下式所示。
cos sin 22cos()sin()3322cos()sin()33a d b q c u u u u u θθθπθπθπθπ⎛⎫ ⎪-⎛⎫⎪⎛⎫ ⎪⎪=--- ⎪ ⎪⎪⎝⎭ ⎪⎪⎝⎭ ⎪+-+⎝⎭(2)d/q 轴磁链方程: d d d f q q qL i L i ψψψ=+⎧⎪⎨=⎪⎩ 其中,ψf 为永磁体产生的磁链,为常数,0f r e ωψ=,而c r p ωω=是机械角速度,p 为同步电机的极对数,ωc 为电角速度,e0为空载反电动势,其值为每项倍。
基于Matlab7_1_Simulink的永磁直线同步电机的建模与仿真
图 2 永磁直线同步电机直接推力控制系统结构框图
该系统控制原理为 :逆变器输出电压经测量模 块检测 ,输出三相电压 V abc和两相电流 iab ,进入磁 链 、推力计算及磁链观测模块算得磁链 、推力的真 实值 ,与给定值进行滞环比较 ,来确定开关电压矢 量的选取 ,进而确定逆变器的开关状态 。
第 4 期 贺 凯等 :基于 Matlab7. 1/ Simulink 的永磁直线同步电机的建模与仿真 45 1
和 D TFC 控制系统模型的有效性 ,验证了其控制算 法 ,为 PML SM D TFC 控制系统的设计和调试提供 了理论基础 。
2 永磁直线同步电机的数学模型
为了简化分析 ,假设 : (1) 初级绕组 Y 型连接 ; (2) 气隙磁场呈正弦分布 ; (3) 不考虑电源引起的电 压和电流谐波及磁饱和效应 ; (4) 忽略涡流和磁滞 损耗 ; (5) 不考虑温度和频率变化对电机参数的影 响 ; (6) 永磁次级无阻尼绕组 。图 1 为永磁直线同 步电机的矢量图 。
通过 PML SM 本体模块 、磁链和推力计算模 块 、磁链扇区观测模块 、开关表模块 、滞环比较模 块 、逆变器模块和电压电流检测模块的有机整合 ,
图 7 永磁直线同步电机直接推力控制系统仿真模型方框图
关于系统仿真模型的几点说明 : 1) 简 化 分 析 时 , 若 忽 略 边 端 效 应 的 影 响 ,
质量 ; B 为粘滞摩擦系数 ; Fl 为负载阻力 。 式 (1) ~ (7) 即为永磁直线同步电机在 d2q 轴
坐标系下的数学模型 。
3 基于 Matlab7. 1/ Simulink 的 PML SM 直 接推力控制系统模型的建立
在 Matlab7. 1 环境下 ,参照文献[ 4 ]和[ 5 ] ,利用 Simulink 和 SimPowerSystems 中丰富的元器件库 , 建立 PML SM D TFC 系统的仿真模型 。系统结构 框图如图 2 所示 。
永磁同步电机的模型和方法课件

电流方程
电流方程描述了PMSM的定子 电流与转子位置之间的关系。
电流方程通常表示为:I = Iq×sin(θr) + Id×cos(θr),其中 I是电流矢量,Iq是定子电流矢 量,Id是直轴电流矢量,θr是转
子位置角。
该方程反映了随着转子位置的变 化,定子电流矢量的变化情况。
磁链方程
磁链方程通常表示为:Ψ = L0×I + L1×(θr),其中Ψ 是磁通链数,L0和L1是与电机结构有关的常数,θr 是转子位置角。
06 参考文献
参考文献
01
总结词
详细描述了PMSM的数学模型和等效电路模型,并给出了仿真结果和实
验结果。
02 03
详细描述
本文介绍了永磁同步电机的数学模型和等效电路模型,通过仿真和实验 验证了模型的准确性和有效性。该文还对PMSM的控制器设计进行了详 细讨论,为PMSM的控制提供了理论依据。
总结词
磁链方程描述了PMSM的磁通链数与转子位置角之间 的关系。
该方程反映了随着转子位置的变化,磁通链数的变化 情况。
转矩方程
转矩方程描述了PMSM的输出转矩与定子电流之间的关系。
转矩方程通常表示为:T = (P/2π)×(θr×Iq),其中T是输出转矩,P是电机极对数,θr是转 子位置角,Iq是定子电流矢量中的直交分量。
永磁同步电机的发展趋势和挑战
发展趋势
随着技术的不断发展,永磁同步电机将朝着更高效率、更高可靠性、更小体积和更低成本的方向发展 。同时,随着智能制造和物联网技术的快速发展,永磁同步电机的智能化和网络化也将成为未来的发 展趋势。
挑战
尽管永磁同步电机具有许多优点,但在高温、高湿、高海拔等恶劣环境下运行时,仍存在一些挑战。 例如,高温会导致永磁材料性能下降,高湿会使电机腐蚀生锈,高海拔会使电机功率下降等。因此, 提高永磁同步电机的环境适应性是当前面临的重要问题之一。
永磁同步电机数学模型建立

永磁同步电机数学模型建立永磁同步电机是一种常用的电动机类型,具有高效率、高功率密度和高控制精度等优点,在工业和交通领域得到广泛应用。
为了实现对永磁同步电机的控制和优化设计,需要建立其数学模型。
本文将介绍永磁同步电机的数学模型建立过程,并对其进行详细分析。
首先,永磁同步电机的数学模型可以分为两个部分:电磁模型和机械模型。
电磁模型描述了电机的电磁特性,包括电机的电感、电阻和磁链等参数;机械模型描述了电机的机械特性,包括电机的转动惯量、摩擦力和负载扭矩等参数。
在电磁模型中,首先需要建立电机的磁链方程。
磁链方程描述了电机的磁链与电机的电流之间的关系。
对于永磁同步电机而言,其磁链方程可以表示为:ψ= Ld * id + Lq * iq其中,ψ表示电机的磁链,Ld和Lq分别表示电机的d轴和q轴的电感,id和iq分别表示电机的d轴和q轴的电流。
接下来,需要建立电机的电流方程。
电流方程描述了电机的电流与电机的电压之间的关系。
对于永磁同步电机而言,其电流方程可以表示为:ud = R * id + ω* Lq * iq + ω* ψuq = R * iq - ω* Ld * id其中,ud和uq分别表示电机的d轴和q轴的电压,R表示电机的电阻,ω表示电机的角速度。
在机械模型中,首先需要建立电机的转动方程。
转动方程描述了电机的转动惯量与电机的转矩之间的关系。
对于永磁同步电机而言,其转动方程可以表示为:J * dω/dt = Tm - Tl - Tf其中,J表示电机的转动惯量,Tm表示电机的电磁转矩,Tl表示电机的负载转矩,Tf表示电机的摩擦转矩。
最后,需要建立电机的速度方程。
速度方程描述了电机的速度与电机的转矩之间的关系。
对于永磁同步电机而言,其速度方程可以表示为:dθ/dt = ω其中,θ表示电机的转角,ω表示电机的角速度。
通过以上的数学模型,可以对永磁同步电机进行建模和仿真,实现对电机的控制和优化设计。
在实际应用中,可以通过调节电机的电流和电压来控制电机的转矩和速度,从而实现对电机的精确控制。
永磁同步电机的数学模型与矢量控制原理
永磁同步电机的数学模型与⽮量控制原理永磁同步电机的数学模型及⽮量控制原理WAA磁同步电机的转F上⽔盛体的安装⽅式的不同,则电机的制造丄适⽤场所、运⾏?性能、控制⽅法也郁有所五同。
根据氷磁体在转⼦上的位貰不同,永磁同步电机可分为⼩叫(i)表骷式永磁同应电机t Surface-mounted PMSM.简称SPMSM A. SPM)* Jt转f结构如下图所⽰。
SPM电机转⼦上的永磁体位于转⼦铁芯的表⾯,通常呈⽡⽚形, 为电机提供径向磁通。
另外,因外包钢膜上的感⽣涡流损耗,遣成较⼤的铁损,⽽且⽓隙较⼤?导致其效率较低。
但磁阻转矩较⼩.若对其进⾏合理的控制可获得较好的低速运转特性。
(ii)内埋式永磁同步电机(Interior PMSM,简称1PMSM或IPM),此类电机转⼦上的永磁体位于转了内部,通常呈条状。
由丁此种转⼦具仃不对称的磴路給构,所以它⽐SPMSM 分磁阳转矩,从⽽⼤⼤提离了电机的功率密度F实现屈磁控制。
同时,由于永磁休在转⼦铁芯内部,所以这类电机有更加坚固的转⼦結构,适合运转于⾼速场IPM 的定⼦电感随转『鎚极位西⾮线性变化.所以1PM的捽制性能随;⼖⼦电流换柑相移影响⼝SPM与IPM的转于结构如图2.1所⽰。
本⽂上嘤研究SPMSM的数学模型及其⽮豐控制⽅法。
⽔磁体铁芯SPM转⼦结构图2.【永毬同歩电机转⼦蒂构2.2永磁同步电机的数学模型⽊节苜先建⽴PMSM的数学模型,这也是后续研究PMSM⽮丘控制算法的屣础"接⼘來分别对三相静⽌坐标系、两和邯⽌坐标系和两相旋转堰标系F的PMSM 的数学模型进⾏描述。
严格的说,永磁同步电机是⼀个存在⾮线性磁化特性和饱和效应的电磁装留,它的动态⽅程式⼀个⾼阶微分⽅程,很难对它进⾏粘确求解,所以必须对它进⾏⼀定程度的简化,将它化成⼀个⼆阶微分⽅程组。
为了突出主婆何题,先忽略次要因素,作如下假设叫(1)忽略谐波效应,设定⼦三相绕组完全对称且在空间中互差120°电⾓度,所产⽣理想正弦磁动势;(2)忽略永磁体的⾮线件饱和因素,认为各相绕纽的阴值、电感都是恒定的,FI Ro = R 、= R< = &丄(! = — = Lc ;(3)不计电机的磁滞损耗和涡流损耗等:(4)不考电频率和温度变化对电机参数的场响:(5)转⼦上没有阻尼绕组,永磁体没有阻尼作⽤。
(1)两相静止坐标下永磁同步电动机的数学模型

(1)两相静止坐标下永磁同步电动机的数学模
型
永磁同步电动机的数学模型可以表示为:
1. 电磁转矩方程:
磁链方程:
ψd = Ld * id + (Lq - Ld) * iq
ψq = Lq * iq
电磁转矩方程:
Te = 1.5 * (ψd * iq - ψq * id)
其中,ψd和ψq分别表示直轴和交轴磁链,Ld和Lq表示直轴和交轴的电感。
2. 电流方程:
直轴电流方程:
Ud = R * id + ωe * Lq * iq + ψq * ωm
Uq = R * iq - ωe * Ld * id - ψd * ωm
其中,Ud和Uq分别表示直轴和交轴电压,R表示电阻,ωe表示定子电流的角频率,ωm表示转子电流的角频率。
3. 机械方程:
转速方程:
Te = J * dωm/dt + B * ωm
其中,Te表示电磁转矩,J表示转动惯量,B表示转子的摩擦阻尼系数。
综上所述,这些方程构成了永磁同步电动机的数学模型,可以用来描述其电磁转矩、电流和转速之间的关系。
永磁同步直线电机的数学建模

R=3.740625Ω
数学建模
永磁同步直线电机
为了方便分析控制性能和导出控制方法引入坐标变换
• 三相交流变量 Clarke变换 • 两相交流变量 Park变换 • 两轴直流变静止坐标系
变 换 矩 阵
两相旋转坐标系
建模前的假设
• 1)不考虑磁路饱和,忽略端部效应(如极数尽量取多,行 程两端留有较长的磁轨等) • 2)气隙中的磁场在空间上按正弦分布。
永磁同步直线电机的 d-q 轴模型
参数: L 为电枢轴电感 p 为极对数 Ψf为定子永磁体在电枢中的耦合磁链 Ke= Ψf· 为反电动势系数 p Kt=K·Ψf为推力系数 v 为电机速度 M 为动子和负载的质量 B为粘滞摩擦系数 Fm为电磁推力 Fd为负载阻力
永磁同步直线电机的数学模型框图
电枢电阻的计算
交流永磁同步电动机数学模型的建立与分析
交流永磁同步电动机数学模型的建立与分析1模型建立交流永磁同步电动机(Permanent Magnet Synchronous Motor, PMSM)根据转子位置可以分为内转子、外转子两种。
主要部件有机座、定子铁心、定子线圈、转子铁芯、永磁体、轴、轴承和电机端盖等,此外还包括转子支撑部件、冷却涵道、接线盒等结构。
PMSM的定子主要指定子绕组与定子铁心部分,对于常见的三相绕组,三相绕组对称分布,各相绕组轴线在空间互差120°,且通入三相绕组的电流相位依次相差120°。
PMSM的转子包括永磁体、转子铁心、转轴、轴承等。
转子提供的磁场主要是由转子铁芯上极性交替的永磁体所发出的,具体气隙平均磁密值大小以及气隙磁密波形的正弦性,主要取决于转子铁芯中永磁体的尺寸、摆放形式以及隔磁措施等因素。
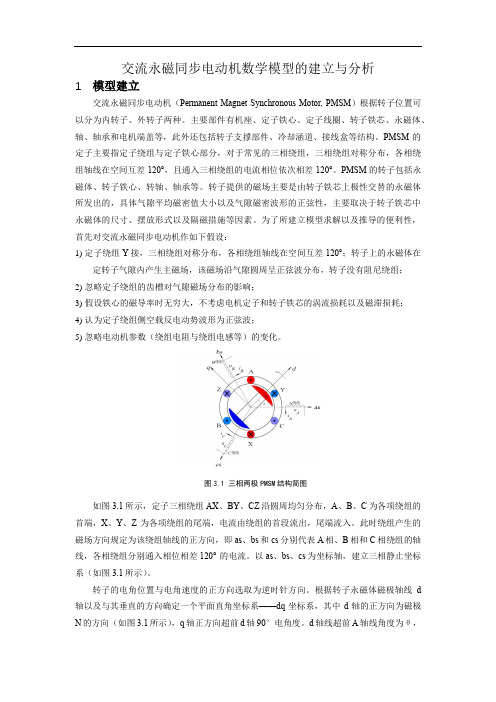
为了所建立模型求解以及推导的便利性,首先对交流永磁同步电动机作如下假设:1)定子绕组Y接,三相绕组对称分布,各相绕组轴线在空间互差120°;转子上的永磁体在定转子气隙内产生主磁场,该磁场沿气隙圆周呈正弦波分布,转子没有阻尼绕组;2)忽略定子绕组的齿槽对气隙磁场分布的影响;3)假设铁心的磁导率时无穷大,不考虑电机定子和转子铁芯的涡流损耗以及磁滞损耗;4)认为定子绕组侧空载反电动势波形为正弦波;5)忽略电动机参数(绕组电阻与绕组电感等)的变化。
图3.1 三相两极PMSM结构简图如图3.1 所示,定子三相绕组AX、BY、CZ沿圆周均匀分布,A、B、C为各项绕组的首端,X、Y、Z为各项绕组的尾端,电流由绕组的首段流出,尾端流入。
此时绕组产生的磁场方向规定为该绕组轴线的正方向,即as、bs 和cs 分别代表A 相、B 相和C 相绕组的轴线,各相绕组分别通入相位相差120° 的电流。
以as、bs、cs为坐标轴,建立三相静止坐标系(如图3.1所示)。
转子的电角位置与电角速度的正方向选取为逆时针方向。
永磁直线电机精确相变量建模方法(精)
第29卷第9期中国电机工程学报V ol.29 No.9 Mar.25, 200998 2009年3月25日 Proceedings of the CSEE ©2009 Chin.Soc.for Elec.Eng. 文章编号:0258-8013 (2009 09-0098-06 中图分类号:TM 351;TM 359 文献标志码:A 学科分类号:470⋅40永磁直线电机精确相变量建模方法曾理湛1,陈学东1,李长诗2,农先鹏1,伞晓刚1(1. 数字制造装备与技术国家重点实验室(华中科技大学,湖北省武汉市 430074;2. 郑州轻工业学院机电工程学院,河南省郑州市 450002Accurate Phase Variable Modeling of PM Linear MotorsZENG Li-zhan1, CHEN Xue-dong1, LI Chang-shi2, NONG Xian-peng1, SAN Xiao-gang1(1. State Key Laboratory of Digital Manufacturing Equipment & Technology (Huazhong University of Science and Technology,Wuhan 430074, Hubei Province, China; 2. College of Mechanical and Electrical Engineering,Zhengzhou University of Light Industry, Zhengzhou 450002, Henan Province, ChinaABSTRACT: This paper proposes a general finite element (FE based phase variable modeling method of permanent magnet (PM linear motors for the accurate dynamic simulation of drive systems. A general phase variable model of PM linear motors is established taking account of the effects of the nonideal geometrical structure on the thrust force, in which the mover position dependent variables are obtained from FEsolutions using the cubic spline interpolation. Considering the effect of the snubber circuits of the power electronic devices, a new S-function based modeling method is proposed, with which a general simulation model of PM linear motors is directly implemented in Simulink using the state space equations. Simulation results of a PM linear motor driven in both two-phase conduction mode and i d=0 vector control mode show that the FE-based phase variable model provides a fast, accurate and efficient modeling method for the integrated PM linear motor drive systems dynamic analysis.KEY WORDS: phase variable model; permanent magnet; linear motor; finite element; S-function; force ripple摘要:针对永磁直线电机控制系统的精确动态仿真,提出了一种基于有限元的永磁直线电机一般化相变量建模方法。
直线电机位置控制算法及仿真

直线电机位置控制算法及仿真直线电机位置控制算法及仿真1 绪论1.1 研究背景及意义随着工业机械自动化程度的不断升级,有力的带动了上游直线电机在中国的快速成长,国外品牌纷纷加大对中国市场的投入力度,永磁同步直线电机是一种将电能直接转化是动能的转化装置,省去了中间的转换机构,消除了机械转动链的影响,具有速度快,推力大,精度高等诸多优点,因此,广泛应用于精密和高速运行等领域。
但是永磁同步直线电机是一个典型的非线性多变量系统,许多非线性因素的存在都会影响到永磁同步直线电机系统的控制性能,如没有知的负载和摩擦等。
传统的PID控制方法已经不能满足于永磁机电动机的高精度场合,因此如何设计高性能的直线电机位置控制算法一直以来都是控制领域的热点问题之一。
因此,在传统PID控制方式下,针对多变量、非线性、强耦合的永磁同步直线电机系统设计了一种滑模位置控制器,弥补了常规PID 控制跟踪精度不高的缺点。
滑模控制具有控制精度高、抗干扰能力强、适用范围广的等优点,因此滑模控制方法已经成是永磁同步直线电机领域重点关注问题,相关研究人员对此进行了深入研究。
1.2 国内外研究现状直线电机的研究现状1840年Wheatsone开始提出与制作了略具雏形的直线电机。
从那时至今,在160多年的历史记载中,直线电机经历了三个时期。
1840-1955年是探索实验时期:从1840年到1955年的116年期间,直线电机从设想到实验到部分实验性应用,经历了一个不断探索,屡遭失败的过程。
自从Wheatsone提出和试制了直线电机以后,最早明确的提到直线电机文章的是1890年美国匹兹堡市的市长,在他写的一篇文章中,首先明确的提到了直线电机以及它的专利。
然而,由于当时的制造技术、工程材料以及控制技术的水平,在经过断断续续20多年的顽强努力后,最终却没有能获得成功。
至1905年,曾有两人分别建议将直线电动机作为火车的推进机构,一种建议是将初级放在轨道上,另一种建议是将初级放在车辆底部。
永磁电机原理及数学模型

异步起动法:在转子上加上鼠笼或起动绕组,使之有异步电动机功能,在起动时励磁绕组不通电,相当异步电动机起动,待转速接近磁场转速时再接通励磁电源,就进入同步运行。
1
2
3
确定转子磁场的位置(初始定位)。知道转子磁极的初始位置,以该位置角建立dq0坐标系,就能使电机以最大力矩起动。如果初始位置角确定错误,则可能会导致转子启动慢、无法启动甚至倒转失步,最终导致启动失败。
永磁同步电机原理及数学模型
无刷直流电动机(BDCM) 基点:用装有永磁体的转子取代有刷直流电动机的定子磁极,将原直流电 动机的电枢变成定子。 三相永磁同步电动机(PMSM) 基点:用永磁体取代绕线式同步电动机转子中的励磁绕组,从而省去了励磁线圈、滑环和电刷,以电子换向实现无刷运行。PMSM的定子与绕线式同步电机基本相同。 主要从永磁体励磁磁场在定子相绕组中感应出的电动势波形来区分这两类电动机。
在交流电机三相对称绕组中,通过三相对称电流可以在电机气隙中产生空间旋转的磁场。在功率不变的条件下,按照磁动势相等的原则,三相对称绕组产生的空间旋转磁场可以用两相对称绕组来等效,三相静止坐标系和两相静止坐标系的变换则建立了在磁动势不变情况下,三相绕组和两相绕组电压、电流和磁动势之间的关系。我们可以看出两坐标系的A、α轴共轴。当磁动势相等时,则ABC在αβ坐标轴上的分量与两相在该轴上的变量关系如下:
在不影响控制性能的情况下,为了简化分析的复杂性,结合所用电机的特点,我们给出以下假设: 定子三相绕组对称,均匀,Y型连接; 反电动势为正弦; 铁磁部分磁路线性,不计饱和、剩磁、涡流、磁滞损耗等影响; 转子无阻尼绕组,永磁体无阻尼作用。
内容
类别
BDCM
PMSM
转矩
高1 5%
低
功率
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
R=3.740625Ω
永磁同步直线电机的 d-q 轴模型
参数: L 为电枢轴电感 p 为极对数 Ψf为定子永磁体在电枢中的耦合磁链 Ke= Ψf· 为反电动势系数 p Kt=K·Ψf为推力系数 v 为电机速度 M 为动子和负载的质量 B为粘滞摩擦系数 Fm为电磁推力 Fd为负载阻力
永磁同步直线电机的数学模型框图
电枢电阻的计算
数学建模
永磁同步直线电机
为了e变换 • 两相交流变量 Park变换 • 两轴直流变量
三相交流静止坐标系
变 换 矩 阵
两相交流静止坐标系
变 换 矩 阵
两相旋转坐标系
建模前的假设
• 1)不考虑磁路饱和,忽略端部效应(如极数尽量取多,行 程两端留有较长的磁轨等) • 2)气隙中的磁场在空间上按正弦分布。