4MZ-6A型自走式采棉机的设计
多功能四轮自走式棉苗移栽机的设计
多功能四轮自走式棉苗移栽机的设计黄智;张保生【摘要】为了克服传统棉苗移栽机操作劳动强度大、移栽与浇水无法联合作业、利用率低等问题,通过优化整机结构布置,合理匹配移栽部分以及车辆传动系统的结构,设计出GDSZMY-1型多功能四轮自走式棉苗移栽机,解决了传统棉苗移栽机驾驶员无法进行移栽与浇水联合作业等问题,若拆下移栽部分,装上喷药部分,该机还可以进行棉田植保作业。
田间试验表明,该机移栽速度1.0~2.16km/h,株距40~60㎝,并实现了断续浇水,每株浇水量在300~500mL,移栽后直立度合格率为98.2%,成活率为96.9%。
%In order to overcome the existing problems of two-wheeled walk-behind cotton transplanter , those are , high labor intensity , inability to realize the joint operation of transplanting and watering , and low utilization , this paper probes into the design of Type GDSZMY-1 highland multifunctional four-wheeled self-propelled transplanter .Depending on the optimization of the whole structure , and the reasonable structure parameters matching of transplanting part and vehicle transmission system , this new type machine solves the problemsof two-wheeled walk-behind transplanter , in which the driver cannotdrive , resulting in difficulties in the joint operation of transplanting and watering .If its transplanting part is removed , and installed with spraying equipment , the machine can also carry out the plant protection operations of cotton fields.Field test shows that, this machine transplanting speed in the 1 ~2.16km/h, 40 ~60 cm spacing, and realizes intermittentwatering , watering quantity per plant in 300 ~500 ml after transplanting , upright degree qualified rate 98 . 2%, the survival rate is 96 .9%.【期刊名称】《农机化研究》【年(卷),期】2014(000)003【总页数】5页(P102-105,112)【关键词】棉苗移栽机;四轮自走式;楔刀开沟器【作者】黄智;张保生【作者单位】中山职业技术学院,广东中山 528404;许昌职业技术学院,河南许昌 461000【正文语种】中文【中图分类】S223.990 引言近年来棉花专用农业机械发展迅速,棉花栽培的多数环节已经实现了机械化,尤其是在棉花移栽环节省工显著。
4MZ-3A型自走式棉花收获机的研制
新疆农机化2020年第3期根据生产零部件技术要求和难易程度进行分类,与国内百余家企业建立了配套供应关系,关键零部件制作工装模具,采用激光切割、数控加工等先进的加工设备和电泳涂装线,确保了产品加工、焊接等产品质量及生产能力要求。
2019年9月,完成了自走式辣椒收获机样机的试制与装配,同年10月在新疆焉耆地区,针对不同板辣和线椒品种进行了田间收获试验,试验效果较好,辣椒成熟度90%以上,辣椒总损失率不超过5%,机械破损率不超过5.2%,含杂率不超过11%,各项性能指标都达到了产品设计要求,满足当地机械化采收的作业标准,但由于辣椒品种和成熟度的多样化,复脱滚筒和清选机构方面还需进一步优化改进。
参考文献[1]胡爽古,陈永成,李玉林,等.浅谈辣椒收获机械的研究现状及前景[J]新疆农机化,2010(3):11-12.[2]孔令军,陈永成,等.基于星形轮与气流的线辣椒清选分离装置的研究设计:中国农机化学报.2013,34(2):102-105.[3]丁志新,杨宛章,靳范.辣椒收获机弹齿式采摘台的设计与分析[J].新疆农机化,2010(6):97-99.doi:10.13620/ki.issn1007-7782.2020.03.002中图分类号:S225.91文献标识码:A0引言棉花是我国主要的经济作物也是重要战略物资,对我国经济稳步增长起到重要作用。
随着种植成本与人工成本的增加,降低采收成本、提升机械化水平成为提高植棉经济效益的重要途径。
在棉花生产全程机械化进程中,机械化采收是最复杂的环节之一,水平摘锭式采棉机因其采摘质量好、机器适应性好等优点被广泛应用[1-2]。
新疆是我国最大的优质棉产区,2019年新疆植棉面积为2.541×106hm 2,总产量为500.2万t ,分别占全国的76.08%和84.9%[3],目前,全疆采棉机保有量为5000余台,机械化采收率可达42%以上,根据国务院《关于加快推进农业机械化和农机装备产业转型升级的指导意见》,到2025年棉花主产区,棉花收获机械化率达到60%,采棉机市场仍有较大的发展前景[4]。
国内采棉机市场格局洗牌 沃得高端采棉机来了
·36·名企名品国内采棉机市场格局洗牌沃得高端采棉机来了本刊记者□ 朱礼好上市前夕发布新款采棉机,去年底进入始正式进入采棉机领域的沃得农机雄心不小。
沃得农机发布的海报显示,这款名为“沃得自走式棉花收获打包一体机(4MZD —6)”配套600马力大功至发动机,采用四驱液压驱动、动力换挡变速箱;PRO16高速采棉头; 内置GPS 和北斗定位模块;配备多摄像头监测系统、计亩器,自动对行,割台仿行。
信息还显示,这款产品销售指导价高达458万元,优惠20万后仍达438万元。
定位高端为什么沃得一上来就搞打包式采棉机背后的原因显然是对标目前采棉机巨头约翰迪尔,从现实情况看,这种采棉机附加值高。
相比棉箱式采棉机,打包式采棉机实现采包一体化,棉花直接变成棉包,不仅省去了拖车、打垛机等配套机械和人员,而且不用停机卸货,工作效率提升25%—30%,能让棉农更快地赚钱、更快速地回收投资。
目前国内高端采棉机基本上被国外企业约翰迪尔和凯斯垄断,而前者市场占有率和保有量又大幅领先,据不完全统计,目前约翰迪尔在新疆市场的采棉机保有量超过3000台之巨。
前些年,由于国内采棉机品牌尚不成熟,尽管约翰迪尔采棉机价格昂贵,但仍然一机难求。
此前,以约翰迪尔推出的5行9970箱式采棉机为例,柴油箱容积454升,可以持续作业一整天无须加油,一小时作业面积可达到20多亩,作业效率相当于500个熟练的采棉工手工采摘。
而最近两年推出的升级版的约翰迪尔CP690自走式打包摘棉机,采用约翰迪尔PowerTech 13.5升发动机,功率560马力,一档采摘速度可达7.1公里/小时,该机的二档刮采速度也增加了5%、最高可以达到 8.5 公里 /小时。
可一次完成田间采棉和机械打包,行走卸载棉包,作业效率更是相当于上千个人工。
实际上,国内农机科研型企业中国农机院也在2020年创新推出了4MY —6型圆包式采棉机,可实现棉花采摘、输送、集棉、打包、裹包,以及不停车卸包联合作业,提高了棉花储存的安全性,降低了转运成本,在新疆棉花产区广受欢迎。
4MZ-4自走箱式采棉机的研制与试验

4MZ-4自走箱式采棉机的研制与试验
王萧;黄开鹏;黄杰;王淮新;巩鹏
【期刊名称】《新疆农机化》
【年(卷),期】2024()2
【摘要】为满足不同种植行距下的棉花采收需要,研制了4MZ-4自走箱式采棉机,该机具有采收行距可调的特点,经田间试验验证,作业过程中的平均采净率为95.1%,平均含杂率为6.8%,平均撞落棉损失率为1.65%,平均籽棉含水率增加值为2%,通过试验证明该机的性能优良,各方面均能够满足采收的作业指标需求。
【总页数】4页(P32-34)
【作者】王萧;黄开鹏;黄杰;王淮新;巩鹏
【作者单位】铁建重工新疆有限公司
【正文语种】中文
【中图分类】S225.911
【相关文献】
1.河北省2016年度重点研发计划项目r——"智能型自走式采棉机研制"项目
2.三头自走式采棉机研制项目推广应用分析
3.约翰迪尔7760型自走式摘棉机——可实现田间连续采棉和棉花打包的新式摘棉机
4.约翰迪尔7760型自走式摘棉机——可实现田间连续采棉和棉花打包的新式摘棉机
5.4MZ-4自走箱式采棉机风送歧管流体分析及结构优化
因版权原因,仅展示原文概要,查看原文内容请购买。
采棉机风力输送装置设计
前言新疆是我国最大的棉花生产基地,棉花种植已经成为新疆的主导产业。
以前,以人工为主的棉花收获,不仅生产效率低,而且费时、耗资巨大,棉花收获季节劳动力短缺凸显。
随着播种面积以及产量的日益增加,近年来国内普遍存在的劳动力短缺问题在新疆显得更加突出,因此采用机械化采棉技术是实现棉花持续发展的必然选择。
但目前,使用中的采棉机多为进口产品,由于价格、维修费用高和服务不及时等因素的影响,限制了广泛推广。
因此,采棉机国产化必将是未来新疆采棉机发展的趋势。
国产自走式采棉机采用风力将采摘下的籽棉输送到棉箱。
离心式风机是风力输送系统中的关键部件。
离心式风机是依靠输入的机械能,提高气体压力并排送气体的机械,它是一种从动的流体机械。
经过近几年的田间采收试验及理论研究不断进行和完善,证明国产自走式采棉机的采摘机理合理,结构理论完善,具有采净率高、落地棉少等优点;但存在采摘物输送不畅,易堵塞且含杂率高,难以分离等现象。
针对以上存在的问题,本文通过对棉花物料特性进行研究,对离心式风机的选型已及风送系统进行优化设计,最终设计出更顺畅的采棉机风力输送装置。
目录1.绪论 (1)1.1采棉机国内(外)现状 (1)1.2本课题研究的关键问题及解决思路 (1)2.离心式风机的结构及原理 (2)2.1离心式风机的基本组成 (2)2.2风送系统工作原理 (2)3.离心式风机叶轮的主要形式及传动方式 (2)3.1离心式风机叶轮的主要形式 (2)3.2离心式风机的叶轮特点 (3)3.3离心式风机的主要传动方式 (3)4.采棉机离心风式机设计时几个重要参数选择 (5)5.采棉机离心式风机传动装置的设计与选型 (5)5.1风机设计的常用参数 (5)5.2离心式风机原动机的设计计算 (6)5.3离心式风机带传动的设计计算 (7)5.4带传动的运动和动力参数计算 (9)5.5V带轮的设计计算 (9)6.采棉机离心式风机叶轮的优化设计 (10)6.1叶轮尺寸的决定 (10)b设计 (11)6.2叶轮最佳进口宽度1β设计 (11)6.3叶轮叶片最佳进口角A1β设计 (13)6.4叶轮叶片最佳出口角A27.采棉机离心式风机的进气装置设计 (14)7.1离心式风机进气室 (14)7.2离心式风机进气口及进口集流器 (14)8.采棉机离心式风机风送系统参数确定 (15)8.1风送系统参数确定 (15)8.2风送系统参数优化结论 (17)9.结论 (18)致谢 (19)参考文献 (20)1.绪论1.1采棉机国内(外)现状目前,国内市场上采棉机主流产品主要有美国迪尔公司、凯斯公司和贵航集团生产的水平摘锭式采棉机。
自走式小区棉花播种机的设计
前言随着近来温室大棚的发展以及环保发展意识的日益增强,小型机的需求就显得更为重要,尤其以电力为动力装置的机械。
然而目前广泛应用的播种机是以内燃机及人力为动力装置。
本设计电动小型播种机与传统的播种机相比.新颖之处在于播种机完全采用电力为动力装置,从而改善了人们在田间作业时的工作环境,况且更符合环保发展的观点。
本设计主要用于农户田间播种和设施种植播种.增加部分装置也可用于施肥、耙磨、除草等田间作业。
详细介绍了播种机的结构组成以及各部件的形式、要求以及功用。
详细介绍了电动小型播种机动力装置及各部件要求,包括播种机的动力选择、机械传动的选择及尺寸、排种轮设计、排肥轮的设计、开沟器的设计、轴的设计、链轮的设计、其他的各部件设计以及播种机的工作要求、播种前的准备及播种机的使用等。
在设计中考虑播种深度连续可调、播种行距连续可调、播种穴距可调、种子破碎率和播种均匀度符合国家标准。
设计中在考虑实用的同时,兼顾经济节约,从而达到结构合理、生产成本低、能耗小、效率高,而且操作方便的目的。
关键词:自走式;小型;播种目录1概述 (1)1.1自走式播种机的常识和技术现状 (1)1.2播种方式及常见播种类型 (3)1.3 播种工作过程和机械构造 (3)1.4自走式播种机械的发展趋势 (4)2总体设计 (5)2.1概述 (5)2.2设计任务 (5)2.3设计目的 (5)2.4动力方面的选择 (5)2.5设计主参数及机构类型确定 (6)3.传动设计及播种技术措施 (12)3.1 传动原理简图和动力传递路线图 (12)3.2 传动原理 (12)4 关键零部件设计 (13)4.1 开沟器设计及校核 (13)4.2 排种器 (14)4.3 电机和电瓶选择及带轮设计 (14)4.4 地轮轴设计 (17)4.5 键的校核 (22)4.6 销的校核 (23)4.7 轴承的校核 (24)5 电气控制系统设计 (25)5.1电气系统设计的原则 (25)5.2电气元件的选择 (25)总结 (26)致谢 (27)参考文献 (28)工程概况本文首先是介绍播种机的历史,了解各个阶段的发展及播种机的分类。
采棉机风力输送装置设计
前言新疆是我国最大的棉花生产基地,棉花种植已经成为新疆的主导产业。
以前,以人工为主的棉花收获,不仅生产效率低,而且费时、耗资巨大,棉花收获季节劳动力短缺凸显。
随着播种面积以及产量的日益增加,近年来国内普遍存在的劳动力短缺问题在新疆显得更加突出,因此采用机械化采棉技术是实现棉花持续发展的必然选择。
但目前,使用中的采棉机多为进口产品,由于价格、维修费用高和服务不及时等因素的影响,限制了广泛推广。
因此,采棉机国产化必将是未来新疆采棉机发展的趋势。
国产自走式采棉机采用风力将采摘下的籽棉输送到棉箱。
离心式风机是风力输送系统中的关键部件。
离心式风机是依靠输入的机械能,提高气体压力并排送气体的机械,它是一种从动的流体机械。
经过近几年的田间采收试验及理论研究不断进行和完善,证明国产自走式采棉机的采摘机理合理,结构理论完善,具有采净率高、落地棉少等优点;但存在采摘物输送不畅,易堵塞且含杂率高,难以分离等现象。
针对以上存在的问题,本文通过对棉花物料特性进行研究,对离心式风机的选型已及风送系统进行优化设计,最终设计出更顺畅的采棉机风力输送装置。
目录1.绪论 (1)1.1采棉机国内(外)现状 (1)1.2本课题研究的关键问题及解决思路 (1)2.离心式风机的结构及原理 (2)2.1离心式风机的基本组成 (2)2.2风送系统工作原理 (2)3.离心式风机叶轮的主要形式及传动方式 (2)3.1离心式风机叶轮的主要形式 (2)3.2离心式风机的叶轮特点 (3)3.3离心式风机的主要传动方式 (3)4.采棉机离心风式机设计时几个重要参数选择 (5)5.采棉机离心式风机传动装置的设计与选型 (5)5.1风机设计的常用参数 (5)5.2离心式风机原动机的设计计算 (6)5.3离心式风机带传动的设计计算 (7)5.4带传动的运动和动力参数计算 (9)5.5V带轮的设计计算 (9)6.采棉机离心式风机叶轮的优化设计 (10)6.1叶轮尺寸的决定 (10)b设计 (11)6.2叶轮最佳进口宽度1β设计 (11)6.3叶轮叶片最佳进口角A1β设计 (13)6.4叶轮叶片最佳出口角A27.采棉机离心式风机的进气装置设计 (14)7.1离心式风机进气室 (14)7.2离心式风机进气口及进口集流器 (14)8.采棉机离心式风机风送系统参数确定 (15)8.1风送系统参数确定 (15)8.2风送系统参数优化结论 (17)9.结论 (18)致谢 (19)参考文献 (20)1.绪论1.1采棉机国内(外)现状目前,国内市场上采棉机主流产品主要有美国迪尔公司、凯斯公司和贵航集团生产的水平摘锭式采棉机。
4MZ-6六行自走式采棉机的研发设计
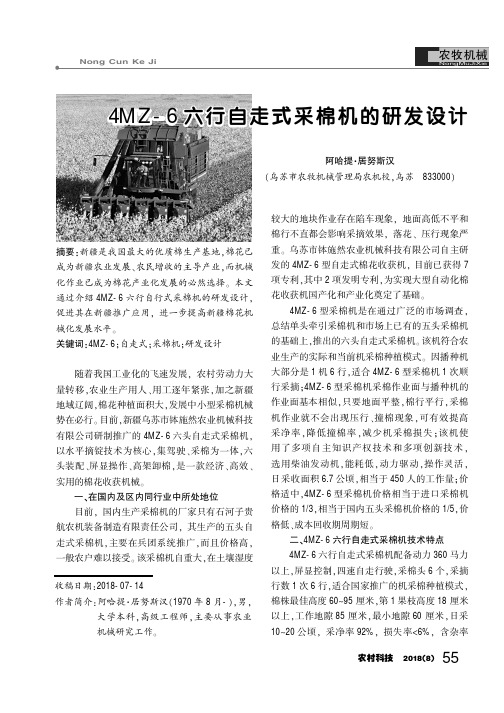
摘要:新疆是我国最大的优质棉生产基地,棉花已成为新疆农业发展、农民增收的主导产业,而机械化作业已成为棉花产业化发展的必然选择。
本文通过介绍4MZ-6六行自行式采棉机的研发设计,促进其在新疆推广应用,进一步提高新疆棉花机械化发展水平。
关键词:4MZ-6;自走式;采棉机;研发设计随着我国工业化的飞速发展,农村劳动力大量转移,农业生产用人、用工逐年紧张,加之新疆地域辽阔,棉花种植面积大,发展中小型采棉机械势在必行。
目前,新疆乌苏市钵施然农业机械科技有限公司研制推广的4MZ-6六头自走式采棉机,以水平摘锭技术为核心,集驾驶、采棉为一体,六头装配、屏显操作、高架卸棉,是一款经济、高效、实用的棉花收获机械。
一、在国内及区内同行业中所处地位目前,国内生产采棉机的厂家只有石河子贵航农机装备制造有限责任公司,其生产的五头自走式采棉机,主要在兵团系统推广,而且价格高,一般农户难以接受。
该采棉机自重大,在土壤湿度较大的地块作业存在陷车现象,地面高低不平和棉行不直都会影响采摘效果,落花、压行现象严重。
乌苏市钵施然农业机械科技有限公司自主研发的4MZ-6型自走式棉花收获机,目前已获得7项专利,其中2项发明专利,为实现大型自动化棉花收获机国产化和产业化奠定了基础。
4MZ-6型采棉机是在通过广泛的市场调查,总结单头牵引采棉机和市场上已有的五头采棉机的基础上,推出的六头自走式采棉机。
该机符合农业生产的实际和当前机采棉种植模式。
因播种机大部分是1机6行,适合4MZ-6型采棉机1次顺行采摘;4MZ-6型采棉机采棉作业面与播种机的作业面基本相似,只要地面平整,棉行平行,采棉机作业就不会出现压行、撞棉现象,可有效提高采净率,降低撞棉率,减少机采棉损失;该机使用了多项自主知识产权技术和多项创新技术,选用柴油发动机,能耗低,动力驱动,操作灵活,日采收面积6.7公顷,相当于450人的工作量;价格适中,4MZ-6型采棉机价格相当于进口采棉机价格的1/3,相当于国内五头采棉机价格的1/5,价格低、成本回收期周期短。
4MZ-3000型自走式梳齿采棉机清花装置的试验研究
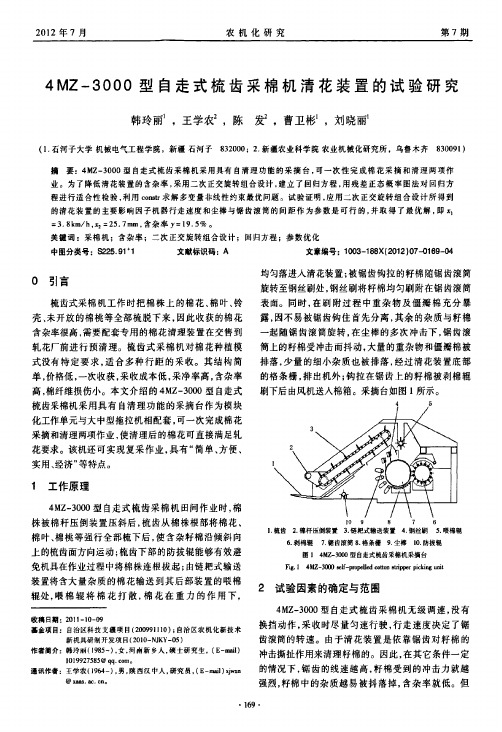
4MZ-3000型自走式梳齿采棉机清花装置的试验研究韩玲丽;王学农;陈发;曹卫彬;刘晓丽【摘要】4MZ-3000型自走式梳齿采棉机采用具有自清理功能的采摘台,可一次性完成棉花采摘和清理两项作业.为了降低清花装置的含杂率,采用二次正交旋转组合设计,建立了回归方程,用残差正态概率图法对回归方程进行适合性检验,利用constr 求解多变量非线性约束最优问题.试验证明,应用二次正交旋转组合设计所得到的清花装置的主要影响因子机器行走速度和尘棒与锯齿滚筒的间距作为参数是可行的,并取得了最优解,即x1=3.8km/h,x2=25.7 mm,含杂率y=19.5%.【期刊名称】《农机化研究》【年(卷),期】2012(034)007【总页数】4页(P169-172)【关键词】采棉机;含杂率;二次正交旋转组合设计;回归方程;参数优化【作者】韩玲丽;王学农;陈发;曹卫彬;刘晓丽【作者单位】石河子大学机械电气工程学院,新疆石河子832000;新疆农业科学院农业机械化研究所,乌鲁木齐830091;新疆农业科学院农业机械化研究所,乌鲁木齐830091;石河子大学机械电气工程学院,新疆石河子832000;石河子大学机械电气工程学院,新疆石河子832000【正文语种】中文【中图分类】S225.91+10 引言梳齿式采棉机工作时把棉株上的棉花、棉叶、铃壳、未开放的棉桃等全部梳脱下来,因此收获的棉花含杂率很高,需要配套专用的棉花清理装置在交售到轧花厂前进行预清理。
梳齿式采棉机对棉花种植模式没有特定要求,适合多种行距的采收。
其结构简单,价格低,一次收获,采收成本低,采净率高,含杂率高,棉纤维损伤小。
本文介绍的4MZ-3000型自走式梳齿采棉机采用具有自清理功能的采摘台作为模块化工作单元与大中型拖拉机相配套,可一次完成棉花采摘和清理两项作业,使清理后的棉花可直接满足轧花要求。
该机还可实现复采作业,具有“简单、方便、实用、经济”等特点。
1 工作原理4MZ-3000型自走式梳齿采棉机田间作业时,棉株被棉秆压倒装置压斜后,梳齿从棉株根部将棉花、棉叶、棉桃等强行全部梳下后,使含杂籽棉沿倾斜向上的梳齿面方向运动;梳齿下部的防拔辊能够有效避免机具在作业过程中将棉株连根拔起;由链耙式输送装置将含大量杂质的棉花输送到其后部装置的喂棉辊处,喂棉辊将棉花打散,棉花在重力的作用下,均匀落进入清花装置;被锯齿钩拉的籽棉随锯齿滚筒旋转至钢丝刷处,钢丝刷将籽棉均匀刷附在锯齿滚筒表面。
4MZ-5A型自走式采棉机的性能与应用
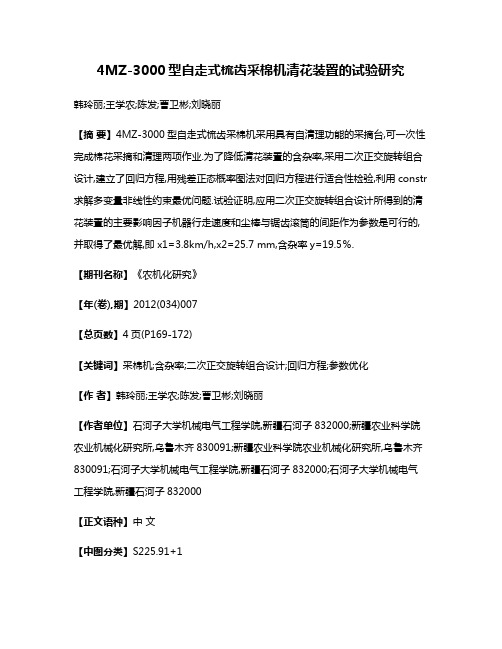
4MZ-5A型自走式采棉机的性能与应用作者:高爱弟,郭健,高治国,王玲玲,孙芳霞,邵叶文来源:《新疆农垦科技》 2015年第6期高爱弟1 ,郭健2,高治国1,王玲玲1,孙芳霞1,邵叶文1(1.石河子贵航农机装备有限责任公司,新疆石河子832000;2.新疆石河子职业技术学院)收稿日期:2015—04—23摘要:本文介绍了国产4MZ - 5A自走式采棉机的主要结构、工作原理、技术参数和性能指标及使用条件,并与国外采棉机在性能和应用方面进行了比较。
关键词:国产;4MZ-5A;自走式采棉机4MZ - 5A自走式采棉机是一种采用前置悬挂式采摘工作台、翻转自动输卸式棉箱、液压与机械混合式传动的大型(五行)水平摘锭自走式采棉机械。
产品经新疆生产建设兵团进行的全面测试和实际应用,其综合指标达到国内领先水平,可完全替代进口同类产品。
1主要结构及工作原理水平摘锭自走式采棉机可根据棉花吐絮情况分一次或多次采收棉花。
本机的主要结构由采棉头、自走底盘、液压系统、驾驶室(含电器操纵系统)、棉箱、电子监控系统、电器系统、淋润系统、自动润滑系统、机具外围防尘系统等组成(图1)[1]。
采棉机在采摘棉花时,由采棉头上的分禾器作为引导,将棉株扶起并导入采摘室,摘锭座管旋转带动摘锭做圆周转动,摘锭上的钩齿将进入采摘室的棉珠上的棉花挂住并缠绕在摘锭上,随着摘锭座管的旋转,缠有棉花的摘锭进入脱棉区,高速旋转的脱棉盘与采棉摘锭呈相反的方向运转,当脱棉盘遇到摘锭上的籽棉时,把籽棉反方向旋转脱下。
脱下的籽棉借助风力输送系统的强大风力气流的力量将籽棉从集棉室吹送进入风筒再高速进入棉箱内。
摘锭经过湿润水刷的清洗后又进入下一个缠绕棉花的循环(图2),进入棉箱的棉花在压实装置的作用下被挤压,体积变小,当采收的棉花容积达到棉箱设计容积时,采棉机利用液压操纵系统和控制系统倾倒棉花,完成整个棉花的采收过程[2]。
采棉头:4MZ - 5A采棉机共有5组采棉头,每组采棉头由分禾器、摘锭筒总成、脱棉盘总成、淋润系统、润滑系统、采棉头外壳及支撑总成组成(图3)。
4mz-3000型自走式梳齿采棉机清花装置的试验研究
4M Z一3000型自走式梳齿采棉机清花装置的试验研究韩玲丽1,王学农2,陈发2,曹卫彬1,刘晓丽1(1.石河子大学机械电气工程学院,新疆石河子832000;2,新疆农业科学院农业机械化研究所,乌鲁木齐830091)摘要:4M Z一3000型自走式梳齿采棉机采用具有自清理功能的采摘台,可一次性完成棉花采摘和清理两项作业。
为了降低清花装置的含杂率,采用二次正交旋转组合设计,建立了回归方程,用残差正态概率图法对回归方程进行适合性检验,利用con sl r求解多变量非线性约束最优问题。
试验证明。
应用二次正交旋转组合设计所得到的清花装置的主要影响因子机器行走速度和尘棒与锯齿滚筒的间距作为参数是可行的,并取得了最优解,即托:3.8km/h,*2=25.7m m,含杂率,,=19.5%。
关键词:采棉机;含杂率;二次正交旋转组合设计;回归方程;参数优化中图分类号:s225.91+1文献标识码:A文章编号:1003—188X(2012)07--0169-040引言梳齿式采棉机工作时把棉株上的棉花、棉叶、铃壳、未开放的棉桃等全部梳脱下来,因此收获的棉花含杂率很高,需要配套专用的棉花清理装置在交售到轧花厂前进行预清理。
梳齿式采棉机对棉花种植模式没有特定要求,适合多种行距的采收。
其结构简单,价格低,一次收获,采收成本低,采净率高,含杂率高,棉纤维损伤小。
本文介绍的4M Z-3000型自走式梳齿采棉机采用具有自清理功能的采摘台作为模块化工作单元与大中型拖拉机相配套,可一次完成棉花采摘和清理两项作业,使清理后的棉花可直接满足轧花要求。
该机还可实现复采作业,具有“简单、方便、实用、经济”等特点。
1工作原理4M Z一3000型自走式梳齿采棉机田问作业时,棉株被棉秆压倒装置压斜后,梳齿从棉株根部将棉花、棉叶、棉桃等强行全部梳下后,使含杂籽棉沿倾斜向上的梳齿面方向运动;梳齿下部的防拔辊能够有效避免机具在作业过程中将棉株连根拔起;由链耙式输送装置将含大量杂质的棉花输送到其后部装置的喂棉辊处,喂棉辊将棉花打散,棉花在重力的作用下,收稿日期:201l—l O—09基金项目:自治区科技支疆项目(200991110);自治区农机化新技术新机具研制开发项目(2010-N JK Y-05)作者简介:韩玲丽(1985一).女.河南新乡人,硕士研究生,(E—m ai l) 1019927585@qq.com。
4MZ-5型采棉机自主化达到国际水平

棉机贵州新疆4MZ-5型采棉机自主化达到国际水平4MZ-5型采棉机是一种采用前置悬挂式采摘工作台,翻转自动输卸式棉箱,液压与机械混合式传动的大型(五行)水平摘锭自走式采棉机,发动机功率186KW。
经新疆生产建设兵团对该产品进行的全面测试和实际应用,采净率达95.03%,作业速度5.77公里/小时,燃油消耗1.7公斤/小时,含杂率小于10%。
其综合指标达到国际先进水平,各项技术与性能达到了国外采棉机指标参数,部分指标优于国外采棉机,可完全替代进口。
该产品是由中国航空工业第一集团所属贵州平水机械有限责任公司与中国农业机械化科学研究院,于2002年通过“产学研”方式合作设计,由贵州平水机械有限责任公司进行改进设计后研制生产的。
除变速箱、液压泵和马达、部分阀和油缸进口,其余全部国产化,国产化率90%以上。
贵州平水机械有限责任公司已成为国内独家,也是全球第三家能够整机生产大型自走式采棉机的企业。
4MZ-5型采棉机研制成功填补了国内空白,打破国外产品的垄断。
2004年我委组织开展4MZ-5型采棉机自主化工程,并安排国债资金给予了重点支持,预计2006年可以形成年产4MZ-5型采棉机100台的能力。
我国贵州平水机械有限责任公司2004年生产的10台采棉机全部被新疆生产建设兵团农八师购买,2005年新疆生产建设兵团又签订了20台采棉机采购协议,其中6台4MZ-5型采棉机已经交货,新一代改进型采棉机已完成联合试验。
4MZ-5型采棉机的研制成功,为我国重大技术装备自主化积累了经验。
一是坚持“产学研”合作方式,使产品设计周期大大缩短;二是重视新产品开发,加大了新产品开发投入,平水公司在资金紧张的情况下已为研制4MZ-5型采棉机先后投入2800多万元;三是增强市场意识,紧跟市场需求,平水公司与新疆建设兵团密切联系,在总装场地和试验棉田等方面得到了新疆建设兵团的大力支持,使采棉机的研制得以顺利进行;四是得到国家政策的支持,4MZ-5型采棉机是“国家重点新产品计划项目”。
4MZ-2(3)型自走式采棉机主传动系技术方案分析与确定
4MZ-2(3)型自走式采棉机主传动系技术方案分析与确定
4MZ-2(3)型自走式采棉机主传动系技术方案分析与确定陈发;王学农;孙颖;庄力骏
【期刊名称】《农业工程学报》
【年(卷),期】2001(017)005
【摘要】根据采棉机主传动方式的要求,通过对发动机外特性、液压传动系统中变量泵和定量马达的调节性能特性的分析,针对国产自走式采棉机的主传动系的3种传动方案的优缺点进行分析比较,确定了国产自走式采棉机主传动系方案,该方案实现了在不同速度范围内的无级变速;并已用于自走式采棉机的生产中.【总页数】5页(68-72) 【关键词】采棉机;液压传动;无级变速
【作者】陈发;王学农;孙颖;庄力骏
【作者单位】新疆农科院农业机械化研究所;新疆农科院农业机械化研究所;新疆农业大学机械交通学院;新疆农业大学机械交通学院【正文语种】中文
【中图分类】S225.91+1
【相关文献】
1.自走式4MZ—2(3)采棉机主传动系统方案分析与确定[J], 陈发; 孙颖; 等
2.欧丽牌喷射式动力烟雾机/4KJW-1300型块茎挖掘机/5XH-1050型花生摘果清选机/9ZR-50型秸秆铡揉多用机/4HW-700型简式地瓜收获机/"绿农"E-8型堆肥翻抛机/LNYJ-1型袖珍型农残测定仪/4MZ-5自走式采棉机/1K-220双铧开沟机 [J], 燕子。
自走式棉模运输车的结构设计与计算
10 270
θʎ
M4 M2 M1
连接销 M3
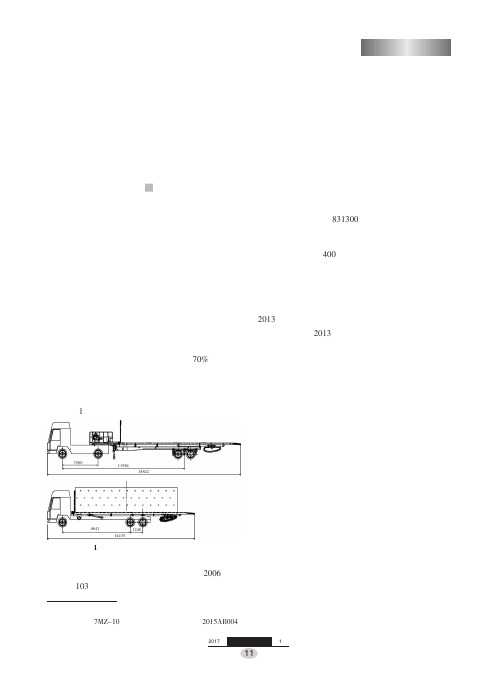
表1 棉模运输车型式 自走式 牵引式 工作效率参数对比 装/卸棉模速度 3.5 min/个 5 min/个 道路行驶速度 75 km/h 50 km/h
(五) 经济的使用模式 自走式棉模运输车在制作成本上会有增加, 因 此售价上可能会有 6 万元~10 万元的提升, 但是用 户不再需要额外购买牵引汽车 (新车 14 万元左右) , 同时减少了一份购买手续和保险等费用, 对于用户 来说实际是更加经济实惠的一种选择。 除以上所述五点外, 自走式棉模运输车还具有 安全性高、 舒适性好、 相对环保等优点。为此自走式 棉模运输车必将成为运模车技术发展方向之一, 具 有广阔的应用前景。 三、 整机结构及计算过程 自走式棉模运输车采用汽车 Ⅱ 类底盘作为基 础, 加装链床组件和履带行走组件, 通过取力器获取 底盘发动机动力带动液压泵, 整机在装卸棉模时均 使用液压系统进行工作。 (一) 确定底盘结构尺寸 选取某型号载货汽车底盘为原型, 保证汽车道 路行驶最小转弯直径 24 m 的要求。经改进确定底 盘轴距尺寸为 6 600+1 300 (6 600 代表前轴中心与后 轴中心距离, 1 300 代表后轴中心与车尾的距离) , 采 用 6ˑ4 载货结构, 最大行驶速度 75 km/h。
牵引式
0
11984
18842
自走式
6641
14435
1245
4 MZ-2.8指杆式采棉机控制系统的设计
4 MZ-2.8指杆式采棉机控制系统的设计孙勇飞;张玉同;石磊;吴崇友;沐森林;陈长林【期刊名称】《农机化研究》【年(卷),期】2014(36)11【摘要】阐述了可编程序控制器在4 MZ-2.8指杆式采棉机液压控制系统中的应用,介绍了采棉机的结构及工作原理,提出了采棉机电液控制系统总体方案,分析了液压系统工作过程和特点,并选用三菱 FX1 S 系列可编程序控制器对采棉机工作过程进行控制。
同时,给出了采棉机结构示意图、液压系统的原理图、采棉机I/O 端子分配图,系统程序的结构框图。
该控制系统能够实现4 MZ-2.8指杆式采棉机的各种功能,达到了预定的控制要求。
%The application of the PLC in the 4MZ-2.8 finger-type cotton picker was described ,the structure and work-ing principle of the cotton picker was introduced ,and the general plan for electro-hydraulic control system was given in this paper .The working process and characteristics of hydraulic system is analyzed , and the Mitsubishi FX 1 S Series Pro-grammable logic controller was used to control the working process of the cotton picker .The schematic diagram of the cot-ton picker , the principle diagram of the hydraulic system , the I/O terminal distribution diagram of cotton picker and structure diagram of system program were given .The control system was able to realize various functions of the 4 MZ-2 .8 finger-type cotton picker and the intended control requirements were achieved .【总页数】4页(P112-114,118)【作者】孙勇飞;张玉同;石磊;吴崇友;沐森林;陈长林【作者单位】农业部南京农业机械化研究所,南京 210014;农业部南京农业机械化研究所,南京 210014;农业部南京农业机械化研究所,南京 210014;农业部南京农业机械化研究所,南京 210014;农业部南京农业机械化研究所,南京210014;农业部南京农业机械化研究所,南京 210014【正文语种】中文【中图分类】S225.91+1【相关文献】1.梳指式采棉机采摘台的设计与仿真 [J], 刘国浩;袁逸萍;孙文磊;黄帅;黄少华2.4MZ-3指刷式采棉机驱动系统的设计 [J], 孙勇飞;吴崇友;薛臻;石磊;张玉同;黄铭森3.4MZ-2.6型复指杆式采棉机 [J], 建农4.梳指式采棉机关键部件的设计与仿真 [J], 关建新5.4MZ―2.6型复指杆式采棉机的设计及试验研究 [J], 沐森林;孙勇飞;陈长林;石磊;张玉同因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
新疆是我国最大的优质棉基地,棉花已是新疆农业发展、农民增收的主导产品。
随着我国工业化的飞速发展以及农村劳动力的转移,新疆农业生产用人、用工逐年紧张,加之新疆地域辽阔,棉花种植面积大,而到目前还没有成熟的大中型棉花收获机械。
因此,新疆发展大中型棉花收获机械势在必行,市场潜力巨大。
目前,国内生产棉花收获机的厂家只有石河子贵航农机装备制造有限责任公司,其生产的五头自走式棉花收获机主要在兵团系统推广,而且价格高,一般农户难以接受。
该棉花收获机自重大,在湿度大的地块作业存在陷车现象,地面高低不平、棉行不直都会影响采摘效果,落花、压行现象严重。
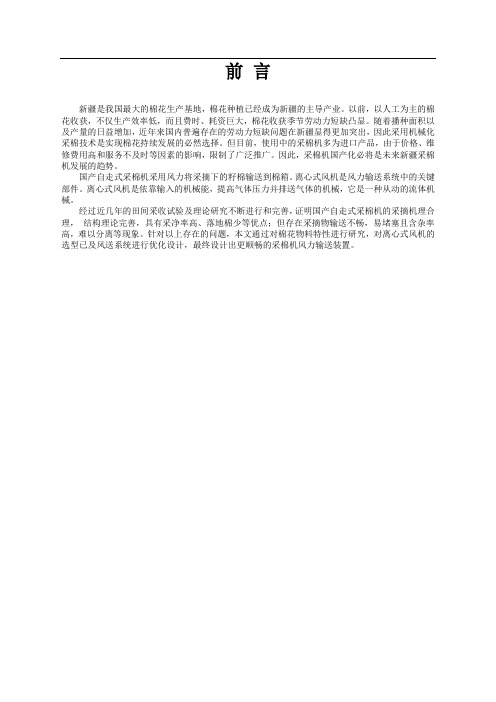
新疆维吾尔自治区乌苏市钵施然农业机械科技有限公司自主研发的4MZ-6A 型自走式棉花收获机(见图1)属国内首创,目前已获得了7项专利(其中2项发明专利),积累了雄厚的技术储备,为实现大型自动化棉花收获机国产化和产业化做出了积极的贡献。
4MZ-6A 型自走式棉花收获机采棉作业面与播种机的作业面基本相似,只要地面平整,棉行平行,采棉机作业不会出现压行、撞棉现象,能够有效地提高采净率,降低撞棉率,减少机采棉损失。
4MZ-6A 型自走式棉花收获机价格适中,价格相当于进口棉花收获机价格的2/3,价格低,回收期短,在已知棉花收获机中属创新产品。
14MZ-6A 型自走式棉花收获机的技术参数4M Z-6A 型自走式棉花收获机技术参数为:配备动力264.7kW (360马力)以上;屏显控制;四速自走行驶;采棉头6个;采摘行数1次6行,适合国家推广的机采棉种植模式76cm ;棉株最佳高度60~95cm ;棉脚高度18cm 以上;工作地隙85cm ;最小地隙60cm ;日采棉面积10~20hm 2;采净率92%;损失率小于6%;含杂率7%;最大转弯半径7m ;耗油率3.8kg/亩(1亩约等于0.067hm 2)。
24MZ-6A 型自走式棉花收获机的技术特点4M Z-6A 型自走式棉花收获机是以水平摘锭技术为核心,集驾驶、采棉为一体,6头装配,高架卸棉,动力强劲,工作效率高,屏显触摸操作,转弯半径小,卸棉高度可与农户拖车配套,能与1膜6行、2膜12行、3膜18行播种模式行距完全对应,能有效提高采净率,降低损失率,是一款经济、高效、实用的收获机械。
4MZ-6A 型自走式棉花收获机采取了翻转20°高效平稳的倾倒棉花,同时增加了3级棉箱,容积增加到36m 3,增加清棉导条面积,让收获的棉花更干净;增加了最为先进的进气除杂系统,用户再也不担心因发动机高温而带来的困扰。
4MZ-6A 型自走式棉花收获机各个易耗品存储箱容积都大大提升,燃油箱1400L ,清洗液箱1363L ,润滑脂箱257L ,延长了棉花收获机工作时间。
风机用双圆弧吸式离心风机,壳叶轮都由铝合金浇铸而成,风力更强劲,有效平稳输送棉花到棉箱。
后桥使用坚固灵4M Z -6A 型自走式采棉机的设计◆徐志龙摘要:介绍了4MZ-6A 型自走式棉花收获机的技术参数、技术特点、关键技术、工艺,阐述了4MZ-6A 型自走式棉花收获机实施的具体内容,分析了应用4MZ-6A 型自走式棉花收获机产生的经济效益。
关键词:自走式;棉花收获机;设计DOI :10.3969/J.ISSN.1673—632X.2019.08.009中图分类号:S220.2文献标识码:A图14MZ-6A 型自走式棉花收获机本栏编辑席尚明X UE SHU JIAO LI U学术交流75活转向,更大程度减小转弯半径,有利于棉花收获机在各种地块上作业。
驾驶仓所有的操作、控制监控都通过PLC (棉花收获机进出口控制系统)完成,整个采棉过程只需控制1个无极变速手柄和方向盘,各挡位的切换只需按动控制面板上的按钮,就能方便快捷地进行高挡、中挡、低挡各挡切换。
整车配置264.7kW (360马力)的发动机来带动整套液压系统,棉花收获机设置液压驱动,不管是行走、采摘还是倾倒棉花,能够更加平稳高效地进行工作。
34MZ-6A 型自走式棉花收获机的关键技术和工艺3.1棉花输送系统的设计4MZ-6A 型自走式棉花收获机建立风机优化设计模型;内部均匀流程设计研究;棉花收获机气力输送管网设计研究;建立棉花收获机双圆弧吸式离心风机优化设计模型及风机内部均匀化流场设计方法,满足棉花收获机高效率需求;建立棉花收获机气力分配与多通道输送管网优化,实现气力输送高效率、低能耗的目的。
3.2底盘与发动机系统匹配研究3.2.1技术关键计算机数值模拟;实验数据优化组合;传动系统动态分析模拟技术研究。
3.2.2创新点实验数据计算机值模拟;采棉底盘传传动系统动态分析模拟。
3.3液压控制系统研究3.3.1关键技术三泵三发动机操纵运转过程中,采摘与行走的同步性;设计选型时,三泵三发动机的功率匹配问题;三泵发动机行走采摘同步电液控制融合技术。
3.3.2创新点采用三泵三发动机同步模糊和直接自适应模糊控制算法来实现系统的采摘与行走速度的同步平稳性,分析得出采摘速度和行走速度同步的关系对应式。
3.4采棉头及其关键部件检测平台的研发3.4.1关键技术采棉头动态检测仪的研发。
3.4.2创新点采棉头动态检测平台主要由采棉头动态检测仪系统组成。
国内一直缺乏一种高性能、专用的采棉头动态检测解决方案。
因此,项目从采棉头生产实际出发,研制高效、专用的采棉头动态检测平台,并将形成自有知识产权。
3.5采棉机智能化控制系统的研发采棉机智能化控制系统支持国际农机具总线协议标准,提供通用的采棉机控制平台,并具备先进的设备诊断、维护技术。
3.5.1关键技术基于CAN 总线(采棉机自动化控制系)的车身监测和诊断架构;基于嵌入式技术搭建系统硬/软件平台;基于国际标准开放系统应用结构;实现整车系统控制、优化及显示;实现整车信息纯数字传输。
3.5.2创新点在国内首次将现场总线技术应用于采棉机,完成系统数据的纯字化传输和采棉机各测控点集制,实现采棉机控制系统的信息化与智能化。
44MZ-6A 型自走式棉花收获机实施的具体内容4.1棉花输送系统设计采棉机工作时,采棉头摘采的棉花直接通过风机提供风力沿着风道输送到棉箱。
如果采摘的棉花不能及时输送到棉箱,将会造成采棉头堵塞,最终导致整个采棉机不能正常工作,严重影响作业效率。
随着棉花种植技术的不断提高,棉花产量也逐年增加,6行采棉机将成为棉花采收装备主流机型,相应地对风机的性能要求也越来越高,现有3行采棉机的输送系统效能已无法满足6行采棉机的输运需求,国产采棉机输送系统面临重新研发、提升性能以满足6行采棉机输送需求的艰巨任务。
目前进口采棉机也同样面临这样的问题。
为了能够让6行采棉机更好适应我国棉花发展趋势,项目组在现有3行采棉机风力输送系统设计、制造的基础上,构建双圆弧双吸式离心双风机设计、制造检测平台及气力输运管网的优化设计数值计算与检测平台,研制满足6行采棉机需求的较高效率、较低能耗的气力输送系统。
项目完成后6行采棉机输送系统有效作业率达到或超过国际同类产品现有水平。
4.24MZ-6A 型自走式棉花收获机双圆弧双吸式离心双风机关键技术4.2.1建立叶轮设计模型叶轮是离心风机的心脏,是风机的核气动部件,叶轮内部流动是一个非常复杂的逆压过程,高速旋转和叶道复杂几何形状都使其内部流动变成了非常的三维湍动,叶轮内部流动的好坏直接决定着整机性能和效率。
通过综合分析叶轮一元设计方法、流断面概念二片减速设计方法和等扩张度、叶轮内相对沿平均流线分布方法、采用流曲率等设计的基础上,应用复杂三维粘性流体动力学数值计算技术,通过给出不能满足叶轮道内气流平均速度沿线的设计分布一组离心风机参数,按照近似模型方法原理,以影响叶轮效率的因素为本栏编辑席尚明学术交流XU E SHU JIAO LIU76约束条件采用正交优化方法进行组合,建立离心风机设计模型满足高效叶轮的需求。
4.2.2风机内部均匀化流场设计研究双圆弧双吸式离心双风机叶轮内部流动非常复杂,气体在流动过程中,在盘、盖之间,叶片压力面出现很强的二次流,在离心叶轮曲率及哥氏力的共同作用下吸附边面层不断增厚,将主流推向压力边形成“射一尾迹”结构导致叶轮出口流场非常不均匀,叶轮动损失增加,同时也使后续元件内部流场产生强烈的不均匀性,降低输送能和效率。
项目将串列叶栅、轮盖开孔等离心自适应边界层控制技术结合起来,通过叶片吸力面处开孔或缝进行结构改抑制流体最高绝对速度,实现在全工况范围内改善离心通风机叶轮的性能,提高效率。
4.34MZ-6A型自走式棉花收获机气力输送管网设计管道气力输送因具有成本低、效率高、污染少、操作危险小、管网布置灵活等优点,已成为普遍适用的固相物料输送方法。
6行采棉机气力输送由双圆弧双吸式离心双风机提供风,星型分支管路将气源分流到6个采棉头及输送管道中部附近,为保证籽棉传输的同步通畅性,要求各分支管路气动特尽量相。
目前,气固两相流动的研究主要集中在对单一管道试验、理论推导及数值模拟方面,但对管网分流报道较少尚未形成统一的理论。
阻力特性是管道输送设计和应用的重要参数之一,在网分流的研究中尤为重要,直接影响了管网布局和动力求。
项目根据流体力学方法,设计、研究接近线的星型分支管路及其气固两相流动特性:管网中的状态和阻力。
同时通过进行星型分支管路气固两相流动实验,利用主成分分析法对影响两支管单位长度压力损失差值的各因素重要性相关进行分析,得出主要的影响因素为全面设计高效率气力输送管网提供依据。
4.4底盘与发动机系统匹配研究4.4.1主要内容6行采棉机主系统中,在3行机基础上主要变化的是发动机功率必然增大、底盘的传动系须采用四轮驱系统,所以主要研究发动机性能与底盘匹配、变速箱及四轮驱系统性能研究。
①发动机性能与底盘匹配研究。
为了降低采棉机工作油耗和提高动力性能,从发动机技术看,提高发动机的动力性和经济性是关键;从整机技术角度看,降低自身重量、改进采棉机外形与结构,轮胎选用等都是有效措施,但改善传动系统与发机的匹配是关键措施,要改善整车燃油经济性与提高动力,发机传系统的匹配非常重要。
主研究内容是:发动机万有特性实验;实验数据计算机值模拟;实验数据优化组合;发动机各工况模拟试验。
②变速箱及四轮驱动系统性能研究。
由于整车质量和功率增加,6行机必须改为四轮驱动系统。
改为四轮驱动系统的优点是,牵引性能和附着性能显著提高,减轻对土壤的压实和对结构破坏程度,较好的操纵性和机动较好的坡地作业稳定性。
变速箱各挡传动比优化设计;四轮驱动系统优化设计与仿真技术研究;传动系态分析模拟技术研究;传动系变速箱实验;四轮驱动系统实验。
4.4.2液压控制系统研究针对目前采棉机液压控制系统采用的单泵单发动机出现负载大,输出压力过高造成泵、发动机寿命短等问题,通过项目的实施,拟采用三泵三发动机来克服以上问题,运用智能控制策略解决三泵三发动机的同步性,通过优化理论设计计算实现采摘与行走泵、发动机的功率匹配选型,提高采净率。