微型计算机控制技术第4章 常用控制程序设计
第4章 常用控制程序的设计
4.2.2 继电器输出接口技术
继电器是电气控制中常用的控制器件, 继电器是电气控制中常用的控制器件 , 一般由通 电线圈和触点构成。 电线圈和触点构成。 线圈通电,常开触点闭合, 线圈通电,常开触点闭合,常闭触点打开 线圈断电,常开触点打开, 线圈断电,常开触点打开,常闭触点闭合
继电器本身具有一定的隔离作用, 继电器本身具有一定的隔离作用,但在与微机接口 连接时通常采用光电隔离器进行隔离。 连接时通常采用光电隔离器进行隔离。
越下限, 越下限,且越下限标志置 位,则说明已经在进行报 警处理
若上一次采样的数据越下限报警, 若上一次采样的数据越下限报警, 则越下限标志位一直是处于置位 状态,没有复位的。 状态,没有复位的。
ORG 8000H ACACHE: MOV R0,#SAMP MOV A, @R0 MOV R1, #20H ACALL DUBSUB JNC BRAN1 MOV A, @R0 ACALL DUBSUB JNC DONE JB 42H, BRAN2 MOV A, @R0 ACALL DUBSUB JC BRAN3 MOV A, @R0 ACALL DUBSUB JC DONE JNB 43H, DONE CLR 43H BRAN4: INC 2AH DONE: RET
2、硬件报警程序设计
报警要求不通过 程序比较法得到, 而是直接由传感 器产生,若要报 警则向CPU申请中 警则向CPU申请中 断,CPU响应中断 CPU响应中断 后,转到中断服 务程序进行报警 处理。读入报警 状 态 P1.0~P1.3 , ~P1 然 后 从 P1 口 的 高 四位输出,完成 报警工作。 报警工作。
本章要点: 报警程序设计 开关量输出接口技术 电机控制接口技术 步进电机控制接口技术
微型计算机控制技术课后习题答案
第一章计算机控制系统概述习题及参考答案1.计算机控制系统的控制过程是怎样的?计算机控制系统的控制过程可归纳为以下三个步骤:(1)实时数据采集:对被控量的瞬时值进行检测,并输入给计算机。
(2)实时决策:对采集到的表征被控参数的状态量进行分析,并按已定的控制规律,决定下一步的控制过程。
(3)实时控制:根据决策,适时地对执行机构发出控制信号,完成控制任务。
2.实时、在线方式和离线方式的含义是什么?(1)实时:所谓“实时”,是指信号的输入、计算和输出都是在一定时间范围内完成的,即计算机对输入信息以足够快的速度进行处理,并在一定的时间内作出反应并进行控制,超出了这个时间就会失去控制时机,控制也就失去了意义。
(2)“在线”方式:在计算机控制系统中,如果生产过程设备直接与计算机连接,生产过程直接受计算机的控制,就叫做“联机”方式或“在线”方式。
(3)“离线”方式:若生产过程设备不直接与计算机相连接,其工作不直接受计算机的控制,而是通过中间记录介质,靠人进行联系并作相应操作的方式,则叫做“脱机”方式或“离线”方式。
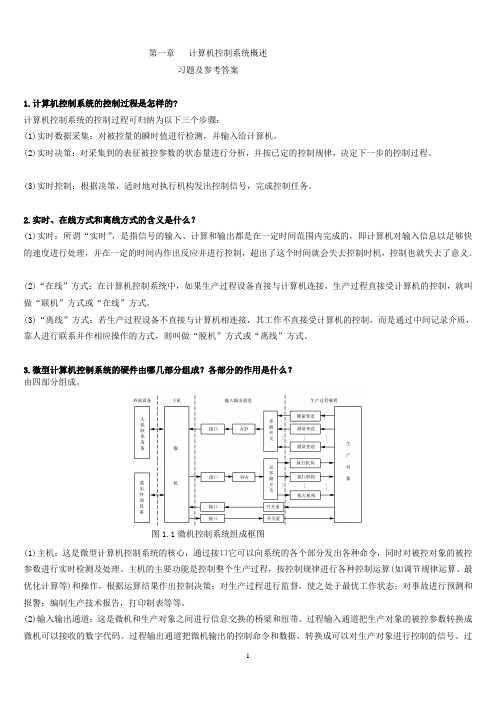
3.微型计算机控制系统的硬件由哪几部分组成?各部分的作用是什么?由四部分组成。
图1.1微机控制系统组成框图(1)主机:这是微型计算机控制系统的核心,通过接口它可以向系统的各个部分发出各种命令,同时对被控对象的被控参数进行实时检测及处理。
主机的主要功能是控制整个生产过程,按控制规律进行各种控制运算(如调节规律运算、最优化计算等)和操作,根据运算结果作出控制决策;对生产过程进行监督,使之处于最优工作状态;对事故进行预测和报警;编制生产技术报告,打印制表等等。
(2)输入输出通道:这是微机和生产对象之间进行信息交换的桥梁和纽带。
过程输入通道把生产对象的被控参数转换成微机可以接收的数字代码。
过程输出通道把微机输出的控制命令和数据,转换成可以对生产对象进行控制的信号。
过程输入输出通道包括模拟量输入输出通道和数字量输入输出通道。
WX04_微型计算机控制技术_第四章

微型计算机控制技术
典型输入Z变换的一般形式为:
A( z ) X ( z) (1 z 1 ) m
(m 1, 2,3)
A(z)为不包含(1-z-1)因子的关于z-1的多项式
微型计算机控制技术
A( z ) X ( z) 1 m (1 z )
微型计算机控制技术441阻尼因子法阻尼因子法是针对最少拍系统只能适用于特定的输入类型对其他输入不能取得满意效果而采用的一种改进方法该方法是在误差对系统输入的传递函数微型计算机控制技术采用阻尼因子法后系统已不可能在最少拍内准确达到稳定只能逐渐地趋于稳定然而系统对输入类型的敏感程度却因此降低了所以系统性能的改善是以降低响应速度为代价的
微型计算机控制技术
思路:
1 ( z ) D( z ) G ( z ) 1 (z)。 • (1)求带零阶保持器的被控对象的广义 脉冲传递函数G(z)。
1 e Ts G( z) Z G (s) s
G( s) (1 z 1 ) Z s
( z ) (1 pz 1 )( z ) D( z ) G ( z )[1 ( z )] G0 ( z )[1 ( z )]
如果被控对象的不稳定极点准确为z=p,那么当形 成闭环时,G(z)的的这一不稳定极点被D(z)的z=p 的零点抵消,得到的闭环传递函数可以不包含不稳 定的极点,系统可以是稳定的。 但是,由于辨识误差或参数漂移等原因,实际被控 对象的不稳定极点可能与p有一个偏差△p,即实际被 控对象的不稳定极点为: z p p
微型计算机控制技术
U ( z ) b0 z ( N M ) b1 z ( N M 1) bM z N D( z ) E( z) 1 a1 z 1 a2 z 2 aN z N
微型计算机控制课件

r(t)+ e(t) e(k) 数字 u(k)
_
T
控制器 T
零阶 u(t)
保持器
扰动
v(t)y(t)
被控 对象
图4-1 计算机控制系统的结构图
控制系统结构
r(t) + e(t) e(k)
u(k)
u(t)
y(t)
_
数字 控制器
零阶 保持器
控制对象
图 1 计算机控制系统结构图(不带干扰)
r(k) +
e(k)
4.1.3 对控制作用的限制
1、控制量的幅度受到限制,即 2、控制能量受到限制,即 3、消耗的燃料受到限制,即
,如阀门等。 ,如电机等。
,如飞行器等。
常规设计方法中,应在设计完成后校核。
4.2 数字控制器的连续化设计技术
4.2.1 数字控制器的连续化设计步骤 4.2.2 数字PID控制器的设计 4.2.3 数字PID控制器的改进 4.2.4 数字PID控制器的参数整定
1、干扰作用在前向通道设参考输入为零源自即R(z)=0,则干扰作用的表达式为:
若
低频段满足此要求。有
(1)D(z)增益越大,稳态误差E(z)越小; (2)D(z)中有积分环节,稳态误差为零。
2、干扰作用在反馈通道
设参考输入为零,即R(z)=0,则干扰作用的表达式为: 因此,为了减小干扰的影响,D(z)G(z)增益应尽可能小。
§ 峰值时间:响应曲线第一次达到峰值点的时间,记为tp。
系统动态特性可归结为: 1、响应的快速性,由上升时间和峰值时间表示; 2、对所期望响应的逼近性,由超调量和调节时间表示。
由于这些性能指标常常彼此矛盾,因此必须加以折衷处理。
微型计算机控制技术4

是
中有z=1的极点时,稳定性条件与准确性条件取得一致, 因此, 的设计要作 即q个方程中第一个方程与v个方程中的 一定的降阶处理。 四、最少拍控制系统的局限性 (1)系统的适应性差 最少拍控制器的 的设计是根据某类典型输入信号设计的,对其他类
应当指出,当
型的输入信号不一定是最少拍,甚至会产生很大的超调和静差。
必需是积分环节数。它不仅要满足有波纹系统的性能要求及全部约束条件,而且
1)当
有单位圆上或圆外的零点时,在
表达式中应把这些零点。
作为其零点而保留。 三、最少拍快速有波纹系统设计的一般方法 设广义对象的脉冲传递函数为
式中,
为对象的S传递函数,当
中不含有延迟环节时,m=1;当
中有延滞环节时,一般m>l。
是 Z-m的部分。
中不包含单位圆外或圆上的零极点,以及不包含延滞环节 是广义对象在单位圆外和圆上的u个零点,
最少拍无波纹系统的设计要求是,除了满足最少有波纹系统的一切设计要求 以外,还须使得 包含 所有的零点。
二、设计无波纹系统的必要条件 针对特定输入函数来设计无波纹系统,其必要条件是被控对象 含有无波纹系统所必需的积分环节数。 三、最少拍无波纹系统 的一般确定方法 中含有无波纹系统所 中必须
最少拍无波纹系统设计的必要条件是:被控对象 必需使 的零点包括 所有的零点。
为使稳态误差为零,
必须含有因子
,即 (7)
其中P≥q,q为对应于典型输入函数 是不包含零点z=1的z-1的多项式。
中分母
因子的阶次。
根据快速性要求,即,使系统的稳态误差尽快为零,故必然有
所以,对于典型的输入来说,有 (8) (9)
1.单位阶跃输入
由式(8)、 (9)有 (10) (11)
微型计算机控制技术学习心得
微型计算机控制技术学习心得第一篇:微型计算机控制技术学习心得微型计算机控制技术学习心得转眼间,一个学期又过去了。
微机原理与控制技术课程已经结束了。
通过从大三下学期的微机原理与接口技术到这学期的微机原理与控制技术的学习,回想起来受益匪浅,主要是加深了对计算机的一些硬件情况和运行原理的理解和汇编语言的编写,期间也听老师讲过,微机原理这门课程是比较偏硬件一点的。
正是因为这一点我还是对它比较喜欢的,因为它和我的专业方向“机电工程”有很大的联系,在机电工程领域很多场合要应用到微机,而且是微机原理是考研复试面试时必考问的专业课,因为我要考研,本着一定要考上的心态,因此对该课程的学习还是有浓厚的兴趣和动力的。
下面谈谈这期学习该课程的心得与体会:总体介绍下这门课程的轮廓吧(也就是教学大纲):一、课程性质与设置目的(一)课程性质微型计算机控制技术是高等院校计算机应用专业本科教学中的一门选修专业课,是从微型计算机原理到微型计算机控制,从理论到实际的必经桥梁,是着重解决和处理工程实际问题的一门课程。
在该课程的教学过程中,将课堂教学与实验教学有机结合,注意培养同学分析问题、解决问题的方法和能力。
该课程主要介绍微型计算机应用在工业控制中的各种技术,重点讲述微型机用于实时控制中的软件、硬件设计方法,以及它们之间的结合问题。
课程注重理论联系实际,从工程实际出发,在设计方法,即实验技术、操作运行、系统调试等方面对学生进行训练,为学生的毕业设计及将来的实际工作奠定基础。
(二)教学目的通过本课程的学习,可使我们对微型机在工业过程控制和智能化仪器方面的应用有个比较全面的了解,为以后的工作和毕业设计打下基础。
二、下面我对该门课程的教学内容做了一个详细的总结1.第1章微型计算机控制系统概述2.教学要点1.微型计算机控制系统的组成2.微型计算机控制系统的分类3.微型计算机控制系统的发展 3.教学内容通过对本章的学习,应当对微型计算机控制系统有一个完整的概念,具体掌握以下几方面的内容。
微型计算机控制技术课程设计
成绩课程设计报告设计题目步进电机控制系统设计课程名称计算机姓名学号班级教师设计日期 2012年步进电机控制系统设计摘要步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的概率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。
这一线性关系的存在,加上步进电机只有周期性的误差而无积累误差等特点,使得在速度、位置领域用步进电机来控制变的非常简单。
本次课程设计采用TDN-AC/ACS计算机控制技术实验箱中的35BYJ46型四相八拍步进电机为对象,以8088CPU为基础设计计算机控制系统硬件电路、8088为核心的步进电机控制系统,编写步进电机控制程序,从而实现步进电机的变速运转以及正反向运转。
关键词:步进电机、四相八拍、电脉冲信号、变速运转、正反向运转Stepper motor control system design AbstractStepper motor is the electric pulse signal into angular displacement or linear displacement of the open-loop control components.In the case of non-overloaded, the motor speed to stop the location of the probability depends only on the pulse and the pulse number, regardless of load changes, that is, to add a pulse motor, the motor is turned a step angle. The existence of this linear relationship, with only periodic error of the stepper motor without the accumulation of errors, etc., makes the speed and position to control the stepper motor areas become very simple.The curriculum design use computer-controlled technology experiments TDN-AC/ACS box in 35BYJ46 four-phase eight-shot stepper motor for the object to 8088CPU-based computer control system hardware circuit design, 8088 as the core of the stepper motor control system, write stepper motor control program, in order to achieve variable speed operation of the stepper motor and the pros and cons to running.Key Words:Stepper motor Four-phase eight-shot Electrical pulses Variable-speed operation Forward and reverse operation目录第一章:步进电机介绍 (1)1.1:步进电机工作原理 (1)1.2:步进电机控制系统原理 (1)第二章:系统设计及硬件介绍 (3)2.1:系统描述 (3)2.2:硬件选取及其简介 (3)2.2.1:硬件选取 (3)2.2.2:执行机构选取 (3)2.2.3:8088cpu介绍 (4)2.2.4:8255接口芯片介绍 (4)2.2.5:ULN2803 (5)第三章:实验设计 (7)3.1:实验线路 (7)3.2:8255口输出电平在各步中的情况图 (7)3.3:8088扩展数据存储器和8255接口电路原理图 (7)3.4: 系统结构图 (8)第四章:程序设计 (9)4.1流程图 (9)4.2:实验程序 (9)第五章:系统运行分析 (12)5.1:过程分析 (12)5.2:运行结果 (12)总结 (13)参考文献 (13)附录 (14)第一章:步进电机介绍1.1:步进电机工作原理步进电机实际上是一个数字/角度转换器,也是一个串行的数/模转换器。
PLC典型控制程序

3、单按钮起动/停止控制程序
00000 DIFU(13) 20000 00000 DIFU(13) 20000
20000
20000
01000
20001
KEEP 01000
20000 01000 20000 20001 01000
01000
按按钮(00000),20000常开触 点接通一次,01000得电并保持。 再按一次按钮(00000),KEEP 复位,01000失电。
25315 01000
20000
CNT001
01000
4、电动机Y-△换接起动程序
00000 00001 20000 00000 00001 20000
20000 20000
TIM 001 #0050
TIM001
TIM 001 #0050
TIM001
01002
01001
TIM 002 #0040 Y
9、脉冲发生器程序 (1)单脉冲发生器
00000
DIFU(13) 20000
00000 20000 TIM001 20001
20001
20001
TIM 001 #0050
5秒
5秒
END
脉冲宽度由TIM001的设定值确定,而 与00000ON的时间长短无关。
(2)连续脉冲发生程序
00000 TIM000 TIM000 #SV 20001 20002 00000
通电延时型
KM KT 00000 01000 TIM001 #SV
KA
KT
KM TIM001 00001 01000
KM 01000
KA是过电流继电器,当电路中电流远大于额定电 流时,过电流继电器及时吸合。过电流继电器的线 圈是串接在负载电路中。
微型计算机控制技术第4章 常规及复杂控制技术

s
H( j) 1ejT 2ejT2(ejT2 ejT2)
j
2 j
T
sinT
2
T
e jT2
T
sinT
2
T
T
2
2
2
从上式可以看出,零阶保持器将对控制信号产生附加相移(滞
后)。对于小的采样周期,可把零阶保持器H(S)近似为:
H(s)1esT11sT(s2T)2 T(1sT )T esT 2
2021/6/10
y(t)
已知G(S)来求D(S)的方法有很多种,比如频率特性法、根轨 迹法等。
2021/6/10
4
2.选择采样周期T
香农采样定理给出了从采样信号恢复连续信号的最低采样频率。 在计算机控制系统中,完成信号恢复功能一般由零阶保持器H(S) 来实现。零阶保持器的传递函数为:
其频率特性为
H(s) 1esT
2021/6/10
1
4.1 数字控制器的连续化设计技术
设计方法:数字控制器的连续化设计是忽略控制回路中所有 的零阶保持器和采样器,在S域中按连续系统进行初步设计, 求出连续控制器,然后通过某种近似,将连续控制器离散化为 数字控制器,并由计算机来实现。
4.1.1 数字控制器的连续化设计步骤 4.1.2 数字PID控制器的设计 4.1.3 数字PID控制器的改进 4.1.4 数字PID控制器的参数整定
2021/6/10
19
3、数字PID控制算法实现方式比较
控制系统中:
①如执行机构采用调节阀,则控制量对应阀门的开度,表征了执 行机构的位置,此时控制器应采用数字PID位置式控制算法;
②如执行机构采用步进电机,每个采样周期,控制器输出的控制 量,是相对于上次控制量的增加,此时控制器应采用数字PID增量 式控制算法;
第四章 常用控制程序设计
正确使用光电耦合器
vcc vc R2
输入、输出端两个电源必须 单独供电。否则,如果使用 同一个电源,外部干扰信号 可能通过电源串到系统中来
(c)接线示意图
太原理工大学自动化 YGW
4.1.2 简单报警程序的设计
第 四 章 常 用 控 制 程 序 设 计
1. 软件报警程序设计 2. 硬件直接报警程序设 计
太原理工大学自动化 YGW
1. 软件报警程序设计
传感器 蒸汽 液面高度 发送器 汽包 H a 预热管 a+b+c 水流量 变速器
LED报警接口电路
+5V 7406 LED R R 2Q 3Q 4Q 5Q 6Q 7Q 2G8Q 1 R 3D 4D 74LS373 D4 D5 5D 6D 7D 8D 1G 1 R 1 R 1 R 1 R 1 R 1
LED的工作电流?
第 四 章 常 用 控 制 程 序 设 计
D0 D1 D2 D3
控制系统中常有一类最基本的输入输出信号,即数字量 (开关量)信号,例如:
第 四 章 常 用 控 制 程 序 设 计
阀门的闭合与断开,电动机的起动与停止,指示灯的亮 与关,继电器的接通与断开。
这些信号的共同特征是以二进制的逻辑“1”和“0”出 现,反过来说二进制数码的任一位都可以代表被控对象 的一个状态。 例如:开关输入电路接点的接通与断开动作转换为数字 信号0或1,与微机相连。
阀门的开到位和关到位信号
太原理工大学自动化 YGW
数字量输入通道
数字量输入通道的基本功能就是接收外部装置或生 产过程的状态信号,这些信号的形式可能是电压、 电流、开关触点。会存在高压、过电压、接触抖动
第 四 章 常 用 控 制 程 序 设 计
微型计算机控制技术知识要点
第一章微型计算机控制系统概述微型计算机控制系统由微型计算机、接口电路、外部通用设备和工业生产对象等组成软件分为系统软件和应用软件;按语言分:机器语言、汇编语言、高级语言微型计算机控制技术可用于计算机控制系统及自动化仪表闭环控制系统是指输出量经反馈环节回到输入端,对控制产生影响第二章模拟量输入/输出通道的接口技术微型计算机处理的只能是数据量,所以数据在进入计算机之前,必须把模拟量转换成数字量(A/D)转换;由于大多数执行机构只能接受模拟量,为了控制执行机构,经微型计算机处理后的数据还必须转换成模拟量(D/A)由于计算机在某一时刻只能接受一个通道的信号,因此,必须通过多路模拟开关进行转换,使各路参数分时进入微型计算机多路开关的主要用途是把多个模拟量参数分时的接通,常用于多路参数共用一台A/D转换器的系统中,即完成多到一的转换;或者把经计算机处理,且由D/A转换器转换的模拟信号按一定的顺序输出到不同的控制回路,完成一到多得转换。
前者称多路开关,后者称多路分配器S/H有两种工作方式,一种是采样方式,另一种是保持方式。
主要用途是:1、保持采样信号不变,以供完成A/D转换2、同时采集几个模拟量,进行数据处理和测量3、减少D/A转换器的输出毛刺,从而消除电压峰值及减少稳定输出值的建立时间4、把一个D/A转换器的输出分配到几个输出点,实现多路稳定控制D/A转换器的输出有输出电流和输出电压两种方式。
输出电压又分单极性电压输出和双极性电压输出START:启动信号,高电平有效;EOC:转换结束信号,发出一个正脉冲,表示A/D转换完成。
可用于检测A/D转换是否完成ADC0808/0809:单一电源,+5V,模拟量输入范围0~5V,分辨率为8位,可锁存三态输出,输出与TTL兼容A/D转换程序设计三部:1、启动A/D转换2、等待或查询转换结束3、读出转换结果若采样是时间很短,工作量太大多路开关作用完成模拟量的转换采样-保持器逻辑端接+5V,输入端从2.3变到2.6v,则输出端从2.3变到2.6v采用ADC0809构成模拟量输入通道,ADC0809在其中起模拟量到数字量的转换和多路开关的作用EOC呈高电平,说明转换已经结束,可以向CPU申请中断,呈低电平说明处于转换过程中D/A转换器的位数多余处理器的位数时,数据分批传送,输入的数字同时进行转换,需要两级数据缓存第三章人机交互接口技术键盘是若干按键的组合作用是:向系统提供操作人员干预命令及数据的接口设备。
课程《微型计算机控制技术》电子教案课件

课程《微型计算机控制技术》电子教案课件第一章:微型计算机控制技术概述1.1 课程简介1.2 微型计算机控制技术的定义与发展1.3 微型计算机控制系统的组成与结构1.4 微型计算机控制技术的应用领域第二章:微控制器基础2.1 微控制器的概念与特点2.2 常见微控制器介绍2.3 微控制器的内部结构与工作原理2.4 微控制器的编程与应用第三章:模拟量输入输出接口技术3.1 模拟量输入输出接口的概念与作用3.2 模拟量输入输出接口的电路设计3.3 模拟量输入输出接口的编程实现3.4 案例分析:模拟量输入输出接口在实际中的应用第四章:数字量输入输出接口技术4.1 数字量输入输出接口的概念与作用4.2 数字量输入输出接口的电路设计4.3 数字量输入输出接口的编程实现4.4 案例分析:数字量输入输出接口在实际中的应用第五章:通信接口技术5.1 通信接口的概念与作用5.2 常见通信接口技术介绍5.3 通信接口的电路设计5.4 通信接口的编程实现第六章:微控制器编程基础6.1 编程语言的选择与使用6.2 微控制器编程的基本概念6.3 常用编程指令与语法6.4 编程实例:实现一个简单的微控制器程序第七章:中断与定时器7.1 中断系统的工作原理与编程7.2 定时器/计数器的工作原理与编程7.3 中断与定时器在实际应用中的案例分析7.4 编程实例:使用中断与定时器实现一个波形发生器第八章:微控制器与外部设备接口技术8.1 并行接口与串行接口的概念与作用8.2 常见外部设备接口技术介绍8.3 外部设备接口的电路设计8.4 外部设备接口的编程实现第九章:微控制器在工业控制系统中的应用9.1 工业控制系统的概念与组成9.2 微控制器在工业控制系统中的应用案例9.3 工业控制系统中常见问题与解决方案9.4 编程实例:使用微控制器实现一个简单的工业控制系统第十章:微控制器在嵌入式系统中的应用10.1 嵌入式系统的概念与组成10.2 微控制器在嵌入式系统中的应用案例10.3 嵌入式系统设计与开发流程10.4 编程实例:使用微控制器实现一个嵌入式系统重点和难点解析一、微型计算机控制技术的定义与发展难点解析:理解微型计算机控制技术的基本原理及其发展过程中的技术创新。
常用控制程序设计

所示。
主程序 用 INT 21H 的 25H 子 功能设置 IRQ2 的中 断向量
中断服务子程序 读入 A/D 值 存 A/D 值 修改存数地址指 针 DI 值 修改通道号 DX+1 DX N 发中断结束命令 开中断,返回 继续采 N 08CL,220DX BX+1BX,BXDI 发中断结束命令 开中断返回,继续采
(2)限速滤波
设顺序采样时刻 t 1 、 t 2 、 t3 所采集的参数分别为 y 1 、 y 2 、 y 3 , 则当: |y2-y1|≤△Y,则y2输入计算机, |y2- y1|>△Y,则y2不采用,但仍保留,再继续采样一 次,得y3。 |y3- y2|≤△Y,则y3输入计算机, |y3- y2|>△Y,则取(y2 + y3)/ 2输入计算机。 这是一种折中的方法,既照顾了采样的实时性,又照顾了 不采样时的连续性。程序判断滤波程序,可用于变化较慢的参 数,如温度、液位等。
ADD DI, 5 ;调整DI指向下一个A/D值存放地址 INC DX ;形成下一个A/D通道地址 DEC CL JNZ L1 ;8个通道未采完,转L1 DEC CH JNZ L2 ;每通道未采完5次,转L2 MOV AL, 20H ;送EOI命令 OUT 20H, AL MOV AX, BP ;恢复原来的中断屏蔽字 OUT 21H, AL MOV AX, 4C00H ;返回DOS INT 21H L1: MOV AL, 20H OUT 21H, AL STI IRET
8 个通道采完? CL=0? Y 5 次采完? CH=0? Y 发中断结束命令 恢复中断屏蔽字 返回 DOS 继续采 图 3-4 巡回检测系统程序框图
程序如下:
DATA SEGMENT
微型计算机控制 第4章 常用控制程序的设计.解析

微机控制技术
4.1.1常用报警方式
表4.1 KD956X 系列报警芯片功能表
P96
选声端电平
模拟声
机器声
SEL1 空
SEL2 VDD
警备声
救护车声 消防车声
VDD
VSS 空
VSS
VSS VSS
微机控制技术
4.1.1常用报警方式
• KD-9561 芯片内设: 振荡器、节拍器、音色发生器、 地址计数器、控制和输出级等部分。 • 根据内部程序,设有两个选声端 SELl和SEL2, 改变这两端的电平,便可发出各种不同的音响。 详见表4.2。 • VDD提供电源正端电压,VSS指电源负端电压(地)。 • KD-9561能发出4种不同的声音,且体积小,价格低廉,音响 逼真,控制简便,所以,广泛应用于报警装置及电动玩具。 外形及报警器电路图,如图4.2所示。
4.4 步进电机控制接口技术
4.1报警程序设计
在微型机控制系统中,为了安全, 对于一些重要的参数或系统部位,
都设有紧急状态报警系统,
以便提醒操作人员注意,或采取紧急措施。
微机控制技术
4.1报警程序设计
4.1.1 常用报警方式 4.1.2 简单报警程序的设计 4.1.3 越限报警程序的设计 4.1.4 远程自动报警系统的设计
4.1.2 简单报警程序的设计
根据系统和参数的要求,报警程序可分为:
简单的越限报警程序;
报警处理程序。
微机控制技术
4.1.2 简单报警程序的设计
1. 软件报警程序设计 锅炉水位自动调节系统, 汽包水位是锅炉正常工 作的重要指标。 液面太高会影响汽包的汽水分离,产生蒸汽带液 现象。水位过低,则由于汽包的水量较少,负荷又很 大,水的汽化会很快。如果不及时调节液面,就会使 汽包内液体全部汽化,可能导致锅炉烧坏以至发生严 重的爆炸事故。所以,锅炉液面是一个非常重要的参 数,一般采用双冲量或如图所示的三冲量自动调节系 统。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
地址之间符合某一函数关系的表格,可以通过函数运算直接求得关键字的所
在地址,然后将该地址单元的内容取出即可。 直接查找法有时也称为计算查表法。
例如,某微型机控制系统中数据采集点记录的关键字K与存储地地址D之
间的函数式为 : D=K*M+F (4-2)
式中 M——每个记录的字节数;
F——数据表(记录)的首地址。
4.2.2 直接查找
要求数据结构应满足下列条件:关键字K与存储地址D之间应满足某个函 数式D(K),关键字数值分散性不大;各元素在有序表格中排列的格式及 所占用的空间完全一致,而且各元素严格按顺序排列。 在微型机数据处理系统中,通常使用线性的表格,它是基于多个元素X1、 X2、…… XN的集合,各数据元素的排列方法及占用的存储器单元数量都相 同。即,要搜索的内容与表格的排列有一定的关系。对于这种关键字与存储
设Vmax 为电动机最大转速,Vmin 为最小转速,Vd 为平均转速 , D=t /T 为占空比,则
Vd=( Vmax – Vmin) D
4.5.2 开环PWM调速系统
1.开环PWM调速系统原理 (1)转速给定部分 通过输入设备输入给定转速给微机。 (2)脉冲宽度发生器 微机根据给定转速,计算出占空比, 产生满足给定要求的脉冲宽度调制信号,输出给驱动器。 (3)驱动器 放大脉冲宽度调制信号,通常由放大器或继电 器组成,也可由TTL集成电路构成。 (4)电子开关 接通或断开电机电枢的供电电源,可用晶体 管、场效应管、晶闸管等功率器件组成,或者由继电器控制。 (5)电动机 执行机构,用以带动被控对象。
4.1.2 逻辑判断程序
逻辑判断程序:根据逻辑关系来确定程序流向的程序。 MCS-51单片机指令系统中,可用于逻辑操作类的指令有: ANL、ORL、XRL、RL、RLC、RR、RRC、CPL、CLR,它们 与其他的控制转移类指令结合起来就可以构成逻辑判断程序。 例4-2 电路如图所示。S1~S4表示4个开关。它们全部都打 开时,绿色指示灯亮,表明系统正常运行,否则等待指令。
以三相六拍通电方式来说明程序的设计。 设R2存放步数;F0H存放转向标志,正转为“0”;20H~25H存放正转模型 ;26H存放正转结束标志;27H~2CH存放反转模型;2DH存放反转结束标志。 程序清单为: ORG 2100H PUSH ACC ;保护现场
MOV R2,#N
CLR C ORL C,PSW.5
2.声音报警驱动电路 常用KD956X系列的模拟集成电路芯片,工作电压宽、静态电流小、声 音节奏可调、可以外接晶体管来驱动喇叭。 下图是一个设计实例。
KD9561
4.4.2 报警程序的设计技术
根据传感器与报警参数的具体情况,报警程序的设计有两种 方法。
全软件报警程序:基本思想是将被测参数的采样值送到单片 机后,再与规定的上、下限值进行比较,根据比较的结果进行 报警或处理,整个过程都由软件实现。
4.3.2 硬件结构
模/数
图4-5 MCS-51通用数据采集和处理系统硬件框图
AD574是12位的,数据要分2次读出。按照数据总线的布置,相应地组合数据。 AD574内部没有模拟开关,外加2片7501。 采用延时后读取数据方式,没有使用中断请求线。
4.4 报警程序设计
4.4.1 微机测控系统中常用的报警方式
4.1.3 标志判断程序
4.1.1 算术判断程序
算术判断:根据算术运 算结果进行判断。
例4-1 查找关键字。
入口条件:在外部 RAM3000H~3020H 的 区 域中检查关键字ABH。 出口条件:找到则将关 键字送入累加器A,否则A 清零。 画出流程图,如图4-1所 示。
图4-1 查找关键字程序流程图
在励磁电压和负载转矩恒定时,电动机转速由电枢电压决定 。电枢电压越高,电动机转速就越高。
改变电枢电压的极性,就可改变电动机转向。 利用微机改变输出量大小和极性,进而改变电机电枢电压。
可以考虑:D/A转换方式;PWM脉冲宽度调制方式。 PWM方式方便,硬件投入少、精度高、抗干扰性能好。其原 理如图所示。
步进电动机控制接口主要由步进控制器和功率放大器组成。
(1)步进控制器 由缓冲寄存器、环形分配器、控制逻辑及 正、反转控制门等到组成,作用是把控制信号变成能够控制步 进电动机动作的脉冲序列。
(2)功率放大器 作用是把控制器输出的控制脉冲加以放大 ,以驱动步进电机转动
2.步进电动机的脉冲序列 步进电动机是否转动是由控制绕组中输入脉冲的有无来控制 ,每步转过的角度和方向由控制绕组中的通电方式决定。所以 ,步进电动机的脉冲序列就是按系统的控制要求,由微机软件 产生的一组时序变化的脉冲组。 3.脉冲序列的组合形式
;步数送R2
;送转向标志
JC
ROTE
;若为反转,则转ROTE
MOV R0 ,#20H ;正转模型始址送R0
AJMP NEXT ROTE:MOV R0,#27H ;反转模型始址送R0
NEXT:MOV A,@R0
MOV P1,A ACALL DELAY
;输出控制模型
;送出控制模型 ;延时
INC R0
MOV A,#00H ORL A,@R0
;修正模型地址
;判断送完一遍
JZ TPL
;送完一遍,则TPL
;步数未送完,则NEXT
LOOP: DJNZ R2,NEXT POP ACC
;恢复现场
RET
TPL:
MOV A,R0
CLR C
;恢复模型始址
SUBB A,#06H
MOV R0,A
AJMP LOOP DELAY: MOV R4,#M1 ;延时
又分成上、下限报警程序以及上、下限报警处理程序。 硬件申请、软件处理报警程序:直接由传感器产生报警信号 (例如电结点式压力报警装置,当压力高于或低于某一极限值 时,结点即闭合,正常时则打开),将这类开关量信号安排为 单片机的中断信号;当单片机响应中断后,在中断服务程序中 完成对相应报警的处理。
4.5 电动机、步进电动机接口技术
第4章 常用控制程序设计
4.1 4.2 4.3 4.4 4.5 4.6 4.7 4.8 4.9 判断程序 数据查找技术 数据采集系统设计 报警程序设计 电动机、步进电动机接口技术 二进制双字节定点数运算子程序 数字滤波程序 标度变换 非线性补偿
4.1 判断程序
4.1.1 算术判断程序 4.1.2 逻辑判断程序
定时器工作方式控制字:TMOD=00H。 允许定时器T0中断。
程序清单
ORG 0000H
AJMP MAIN
ORG 000BH AJMP ZD
;上电转主程序
;T0中断入口地址
ORG 2000H
MAIN:CLR P1.3 MOV TMOD,#00H MOV SP, #60H MOV TL0,#0CH MOV TH0,#0F0H SETB ET0 SETB EA SETB TR0 SJMP $ ;T0置初值 ;允许T0中断 ;CPU开中断 ;启动T0 ;T0工作方式0
例4-6 求函数y=x!(x=0, 1, 2, 3, 4, 5, 6, 7)的值。 特点:计算程序复杂;数据不多,且对应关系唯一。 解法:事先做好表格,查找数表。
4. 3 数据采集系统设计
4.3.1 系统主要功能
4.3.2 硬件结构
4.3.1 系统主要功能
以8031单片机为核心的通用数据采集处理系统设计的实例。 系统主要功能要求如下
4.4.2 报警程序的设计技术
4.4.1 微机测控系统中常用的报警方式
主要依据:现场采样数值与设定紧急状况数值比较。 主要方式:声音、灯光等。 1.发光二极管(LED)与白炽灯驱动电路 用驱动器74LS06或74LS07输出数十mA的驱动电流,点亮LED。 采用通用锁存器或带有锁存器的I/O接口芯片维持报警输出。 利用白炽灯报警时,要使用微型继电器或固态继电器。
4.6.1 二进制双字节定点数乘法运算
无符号双字节乘法子程序QMUL 功能:(R2R3)×(R6R7)→(R4R5R6R7);(R2R3)、
(R6R7)改变。
使用单元:A,B,R2~R7,D
经由P3.4控制,直流电动机单向旋转。其它器件无直接关系。
4.5.3 步进电动机控制接口技术
步进电动机将电脉冲直接转换成相应的角位移或线位移,具有快 速启停、步进精度高等特点,广泛应用于需要精确定位的场合。
步进电动机直接接收计算机输出的数字信号,不需要D/A转换。
步进电动机的角位移与控制脉冲精确同步,若将角位移的改变转 变为线性位移、位置、体积、流量等物理量的变化,便可实现对它 们的控制。 1.步进电动机控制原理
4.2 数据查找技术
4.2.1 顺序查找
4.2.2 直接查找
4.2.1 顺序查找
顺序查找是针对无序排列表格的查找方法,对数据表的结 构无任何要求 。 过程:从数据表头开始,依次取出每个记录的关键字,与 待查记录的关键字比较。如果两者相符,表明查到了记录。如 果整个表查找完毕仍未找到所需记录,则查找失败。 该方法主要用CJNE比较指令,待查找的关键字放在某RAM 单元中,数据表格放在程序存储器ROM中,因此需要MOVC A ,@A+PC指令或MOVC A ,@A+DPTR指令传送数据。 顺序查找速度慢。有n个记录组成的表,平均查找次数为( n+1)/2,因此只适用于数据记录个数较少的情况。 顺序查表法程序设计方法如下: 1.置表的起始地址PC或DPTR; 2.表格的长度存放在某一个寄存器中; 3.要查找的关键字放在某一内存单元中; 4.用CJNE A ,direct,rel指令进行查找。
4.1.3 标志判断程序
标志判断:根据标志单元或标志位的状态进行判断,以确定 程序流向的程序。
例4-4 设MCS-51系统采用6MHZ晶体,用定时器0产生1ms定 时,由 P1.3 输出2ms方波。