水面无人艇路径规划研究综述
水面无人艇的多方向路径规划方法研究
水面无人艇的多方向路径规划方法研究发布时间:2021-09-07T12:20:40.098Z 来源:《探索科学》2021年7月下14期作者:肖越[导读] 随着无人技术的发展,水面无人艇在水质监测、海底勘测、海上巡航和海上运输等方面的应用越来越广。
相对于有人船,USV较多应用于近岸、港口等浅水水域。
USV等航行器在近岸等浅水域中作业时,需对安全水深区和碍航区进行准确划分。
在障碍物边界预留船舶安全缓冲区,缓冲区半径取USV预留安全距离和旋回半径的较大值,以确保船舶安全航行。
路径规划算法分为图搜索规划算法、随机采样方法、曲线插值方法、机器学习方法、仿生智能方法和动态优化方法等。
基于此,本篇文章对水面无人艇的多方向路径规划方法进行研究,以供参考。
中国船舶集团第七一〇研究所肖越湖北宜昌 443000摘要:随着无人技术的发展,水面无人艇在水质监测、海底勘测、海上巡航和海上运输等方面的应用越来越广。
相对于有人船,USV较多应用于近岸、港口等浅水水域。
USV等航行器在近岸等浅水域中作业时,需对安全水深区和碍航区进行准确划分。
在障碍物边界预留船舶安全缓冲区,缓冲区半径取USV预留安全距离和旋回半径的较大值,以确保船舶安全航行。
路径规划算法分为图搜索规划算法、随机采样方法、曲线插值方法、机器学习方法、仿生智能方法和动态优化方法等。
基于此,本篇文章对水面无人艇的多方向路径规划方法进行研究,以供参考。
关键词:水面无人艇;多方向;路径规划方法引言无人水面艇(UnmannedSurfaceVessel,USV),简称无人艇,是一种能够在水面上自主规划、自主导航的小型化、无人化的智能平台。
由于其具有体积小、机动性强、航速快、应用范围广等特点,无人艇近年来已成为国内外智能化海洋装备领域的研究热点和重点,而无人艇的航向控制技术是无人艇装备研制过程中的一项基本而关键的技术。
由于无人艇在水面航行时易受风浪流等环境因素干扰,同时具有复杂的非线性控制系统,因此需要较优的控制方法。
无人船自主航行路径规划技术分析
无人船自主航行路径规划技术分析无人船自主航行路径规划技术是当前海洋工程领域的一个重要研究方向。
随着、机器学习、传感器技术等的发展,无人船在海洋探测、环境监测、货物运输等领域的应用越来越广泛。
自主航行路径规划技术作为无人船的核心功能之一,其研究和应用对于提高无人船的自主性和安全性具有重要意义。
一、无人船自主航行路径规划技术概述无人船自主航行路径规划技术是指利用先进的算法和传感器技术,使无人船能够在复杂的海洋环境中自主规划出一条从起点到终点的最优路径,并能够实时应对海洋环境的变化和障碍物的出现。
这一技术涉及到多个学科领域的知识,包括控制理论、、计算机视觉、海洋学等。
1.1 无人船自主航行路径规划技术的核心特性无人船自主航行路径规划技术的核心特性主要包括以下几个方面:自主性、实时性、安全性和适应性。
自主性是指无人船能够完成路径规划任务,不需要人工干预。
实时性是指无人船能够快速响应环境变化,实时更新路径规划。
安全性是指无人船在规划路径时能够确保航行安全,避免碰撞和搁浅。
适应性是指无人船能够适应不同的海洋环境和任务需求,具有灵活的路径规划能力。
1.2 无人船自主航行路径规划技术的应用场景无人船自主航行路径规划技术的应用场景非常广泛,包括但不限于以下几个方面:- 海洋探测:无人船可以搭载各种传感器,对海洋环境进行探测和监测,为海洋科学研究提供数据支持。
- 环境监测:无人船可以用于监测海洋污染、赤潮等环境问题,为环境保护提供决策依据。
- 货物运输:无人船可以用于货物的海上运输,提高运输效率,降低运输成本。
- 搜救行动:无人船可以用于海上搜救行动,提高搜救效率,减少人员伤亡。
二、无人船自主航行路径规划技术的关键技术无人船自主航行路径规划技术的关键技术包括以下几个方面:2.1 环境感知技术环境感知技术是无人船自主航行路径规划的基础。
无人船需要通过各种传感器感知周围的海洋环境,包括水深、海流、风速、障碍物等信息。
这些信息对于无人船规划出一条安全、高效的路径至关重要。
水下机器人路径规划与控制策略研究
水下机器人路径规划与控制策略研究引言:随着技术的不断发展,水下机器人已经成为了深海探索、水下作业和海洋资源开发等领域中的重要工具。
水下机器人的路径规划与控制策略是其性能优化和任务完成能力的关键因素。
本文将围绕水下机器人路径规划与控制策略的研究进行探讨,并综述目前的研究成果和应用场景。
一、水下机器人路径规划技术的研究现状水下机器人路径规划主要包括环境感知和路径生成两个部分。
环境感知通过声纳、图像处理等传感器获得水下环境的信息,进而建立环境模型。
而路径生成则包括全局路径规划和局部路径规划两个阶段,通过对环境模型进行分析和优化,生成最优路径。
1. 基于图搜索的路径规划方法基于图搜索的路径规划方法主要使用图论的算法,如Dijkstra算法、A*搜索算法等。
这些算法在水下机器人的全局路径规划方面表现出良好的性能。
然而,在面对大规模和复杂水下环境时,计算复杂度较高,限制了其实时性。
2. 基于启发式搜索的路径规划方法基于启发式搜索的路径规划方法利用启发式函数对路径进行评估和搜索,常用的启发式函数有曼哈顿距离、欧几里得距离等。
这些算法具有较好的实时性和计算效率,但在面对复杂、动态水下环境时,过于依赖启发式函数可能导致路径规划的局部最优解问题。
3. 基于遗传算法的路径规划方法遗传算法通过模拟生物进化的过程,以优化路径为目标进行搜索。
这种方法克服了图搜索和启发式搜索的局限性,可以应对大规模、复杂水下环境的路径规划问题。
然而,遗传算法在计算效率上相对较低,需要较长的运行时间。
二、水下机器人控制策略的研究现状水下机器人控制策略主要包括运动控制和姿态控制两个方面,分别涉及机器人的定位和航向控制。
1. 运动控制策略运动控制策略旨在实现水下机器人在水下环境中的高效运动。
目前广泛采用的方法是PID控制器,通过调节控制器的参数来控制机器人的速度和位置。
同时,也有一些基于模型的控制方法,如基于自适应控制和最优控制的方法。
这些方法在提高机器人的运动性能方面取得了较好的效果。
无人船舶的路径规划与避碰策略研究

无人船舶的路径规划与避碰策略研究一、研究背景和意义随着全球经济的快速发展和海上运输业的不断壮大,船舶在国际贸易和物流中扮演着越来越重要的角色。
随着船舶数量的增加,船舶之间的碰撞事故也日益严重,给航运业带来了巨大的安全隐患。
为了降低船舶碰撞事故的发生率,提高航运效率,无人船舶技术逐渐成为研究热点。
无人船舶具有自主导航、自动避碰等功能,可以在一定程度上降低人为操作失误导致的事故风险。
研究无人船舶的路径规划与避碰策略具有重要的理论和实际意义。
研究无人船舶的路径规划与避碰策略有助于提高船舶的安全性能。
通过优化无人船舶的路径规划算法,可以使其在复杂的海洋环境中更加安全地航行,降低与其他船舶发生碰撞的风险。
避碰策略的研究可以为无人船舶提供有效的避碰方法,使其能够在与其他船舶发生碰撞的情况下迅速采取措施避免事故的发生。
研究无人船舶的路径规划与避碰策略有助于提高航运效率,无人船舶可以通过自主导航系统实现精确的定位和导航,从而减少因人为操作失误导致的延误和返航。
通过避碰策略的研究,无人船舶可以在与其他船舶发生碰撞的情况下及时调整航线,避免不必要的停靠和卸货作业,从而提高航运效率。
研究无人船舶的路径规划与避碰策略有助于推动无人船舶技术的发展。
随着无人船舶技术的不断成熟,其在航运业的应用将越来越广泛。
研究无人船舶的路径规划与避碰策略对于推动无人船舶技术的发展具有重要的推动作用。
这些研究成果也可以为其他领域的自主导航技术研究提供借鉴和参考。
1.1 无人船舶的发展现状无人船舶的技术发展主要体现在自主导航系统的完善和智能化水平的提高。
无人船舶的自主导航系统主要包括惯性导航系统(INS)、卫星导航系统(GNSS)和激光雷达等。
GNSS和激光雷达的应用使得无人船舶在环境感知、定位和导航等方面具有更高的精度和实时性。
随着人工智能技术的发展,无人船舶的自主决策能力也在不断提高。
无人船舶产业链已经逐渐形成,包括研发、制造、测试和运营等环节。
基于改进A__算法的水面无人船全局路径规划小论文
基于改进 A*算法的水面无人船全局路径规划摘要: A*( A-star) 算法是无人船全局路径规划中常用的算法之一,但是其规划的路径是不平滑、局部最优解的问题困扰着研究人员。
针对该问题提出一种基于 A*算法改进的路径规划算法。
该算法在栅格化的二维环境模型上扩大节点搜索邻域至 24 和 48 邻域,在更大的优化空间内得到全局最优解,且路径更加平滑。
仿真实验结果表明,该算法在路径最短的基础上能够提高拐点的平滑度和路径的安全性。
关键词: 路径规划; A*算法; 扩大邻域; 无人船0 引言无人船( unmanned surface vessel,USV) 是一种无人操作的水面船。
它凭借自主性、低风险性和环境适应能力强等特点,具有很高的军用和民用等应用前景,其主要功能是代替人执行一些特殊的、对人有危险的任务。
路径规划研究内容是在给定的环境下生成一条安全、合理的路径。
根据给定场景的不同,可分为全局路径规划和局部路径规划。
前者是从开始到一个完整的端到端路径,是这段路径中局部规划的总和; 而后者则是根据运动过程中实时变化的环境进行实时规划。
这两者关系是可以相互转换的,如局部算法可以看做很短一段路径内的全局规划,同理,全局规划也是如此。
现在常用的全局规划算法包括可栅格法和视图法等; 而局部路径规划算法包括人工势场法和遗传算法等。
上述这些都是启发式类算法,在目前的路径规划算法研究中,多数算法都是基于启发式思想实现的,包括蚁群算法和粒子群算法等。
遗传算法是利用迭代求解最优路径,但是实现较为复杂,且运算效率很低; 蚁群算法是一种进化算法,优点是可以并行实现,但是在参数设置方面需要丰富的经验。
人工势场法是一种基于长“场”的算法,当障碍物距离目标点太近时,易形成“死区”,在实际中难以应用。
A*算法在 1969 年被提出,因其运算效率远高于当时主流的Dijkstra 算法而得到了广泛的关注。
学者们将它应用于路径规划当中,发现其效率和结果完成度远高于其他算法,之后 A*算法便被使用在路径规划方面。
水面无人艇运动控制及集群协调规划方法研究
目录
01 引言
03
集群协调规划方法综 述
02 运动控制技术综述 04 研究现状和问题
05 解决方案
07 参考内容
目录
06 结论
引言
随着科技的不断进步,水面无人艇逐渐成为海洋探测、环境监测、军事应用 等领域的重要工具。然而,对于无人艇的运动控制和集群协调规划方法的研究仍 面临许多挑战。本次演示将介绍水面无人艇运动控制及集群协调规划方法的研究 现状和存在的问题,并提出相应的解决方案。
参考内容
引言
随着科技的不断进步,无人艇逐渐成为海洋工程领域的研究热点。无人艇是 一种能够自主控制和导航的水面机器人,具有广阔的应用前景,如海洋科学研究、 水下考古、海洋资源开发和军事侦察等。然而,无人艇的运动控制受到多种因素 的影响,如海流、风浪、自身动力学特性等,使得对其运动特性的理解和控制变 得复杂和困难。因此,研究无人艇的非线性运动控制方法具有重要的理论和实践 意义。
文献综述
无人艇的非线性运动控制方法一直是研究的热点问题。近年来,许多学者和 研究人员致力于研究更为精确和适应各种环境的控制方法。目前,常见的无人艇 非线性运动控制方法主要包括滤波控制、自适应控制和鲁棒控制等。
滤波控制方法主要通过估计无人艇的运动状态,对实际测量值进行滤波处理, 以减小环境噪声和模型误差的影响。自适应控制方法则通过实时调整控制律,以 适应无人艇运动状态的变化。鲁棒控制方法重点考虑了系统中存在的各种不确定 性和干扰,以提高系统的稳定性和鲁棒性。
然而,现有的研究方法仍存在一些不足之处,如未能充分考虑无人艇复杂的 水动力特性、对控制算法的优化不够充分、缺乏实际应用验证等。因此,本次演 示针对这些问题,提出了一种综合的无人艇非线性运动控制方法。
无人艇航路规划设计研究
无人艇航路规划设计研究Research on the Design of USV Path Planning沈海伟(海军装备部驻上海地区第二军事代表室,上海200129)SHEN Hai-wei(Second M ilitary Representative Office o f t he Ministry ofNaval Equipment, Shanghai 200129, China)【摘要】针对国内外无人艇航路规划发展情况,论文在概述无人艇路径自主规划算法的基础上,详细介绍了其近几年国内外无人艇路径规划发展现状,并对路径规划涵盖的算法所具有的优势及缺陷进行了分析,以供参考。
【AbStract】In view o f the development o f USV path planning at home and abroad, based on the sum m ery o f U SV path planning algorithms,this paper introduces the development status o f unm anned craft path planning at home and abroad in recent years in detail, and analyzes the advantages and disadvantages o f t he algorithm covered by path planning, for reference.【关键词】无人艇;航路规划;路径规划;静态避障;动态避障【K e y w o rd s 】USV; path planning; path planning; static obstacle avoidance; dynamic obstacle avoidance【中图分类号】U 66 【文献标志码】A 【文章编号】1007-9467 (2020) 10-0240-03【DOI 】10.13616/j .cnki .gcjsysj .2020.10.314工程建设与设计Construe l ion & Design For P roject1引言水面无人艇是一种具有自主航行能力的小型水面运动平 台,3级海况下可高速航行。
水面无人艇路径规划探讨
水面无人艇路径规划探讨摘要:介绍了水面无人艇的概念和作用,指出了水面无人艇路径规划的重要性。
探讨了水面无人艇路径规划常用的几种环境建模方法,并将其优缺点进行对比分析;研究了水面无人艇路径规划方面的最新研究进展,对各种算法及其改进算法进行评估,总结了学术界对各种算法改进的切入点;探讨了未来的研究方向和重点。
关键词:水面无人艇;路径规划;进展;研究方向0 引言水面无人艇(USV)是一种支持无人操作的船舶,它只需要驾驶员在安全地点进行极少量的远程操作便能执行任务。
USV在海洋数据采样、海上搜索和救援、港口船舶管理、内河交通等方面发挥着重大作用。
目前,在军事领域,水面无人艇技术发展最成熟的国家是美国和以色列,美国海军研发的SpartanScout、SeadooChallenger2000和MUSCL等水面无人艇可用于执行情报收集、反潜作战、监视和侦察等任务;以色列海军的Protector、Stingary和SilverMarlin能够进行海岸物标识别、智能巡逻和电子战争等。
在民用领域,英国Plymouth大学的Springer可用于内河、水库和沿海等浅水域污染物追踪和环境测量。
路径规划,即依据某些优化准则在工作空间中找到一条从起始到目标点的最优安全路径。
路径规划问题一直都是水面无人艇领域的研究重点。
1 图形环境建模环境建模一般是从图形学的角度出发,将现实的物理空间抽象成算法可以处理的抽象空间,实现相互之间的映射。
合适的环境模型有助于更好地理解环境变量,减少不必要的规划和计算。
常用的环境建模方法有可视图空间法、Voronoi图法和栅格法等。
可视图法采用多边形表示障碍物,每个端点都与其所有可见顶点相连,多边形的顶点连接其所有相邻点,因此无人船可以沿多边形边缘移动,通过搜索这些路线的集合,挑选出最佳路径。
可视图法的优点在于可以寻找出全局最优路径,缺点是搜索时间复杂度为O(n2),n指代问题规模,并且可能会发生碰撞。
基于改进A__算法的水面无人船全局路径规划小论文
基于改进A__算法的水面无人船全局路径规划小论文标题:基于改进A*算法的水面无人船全局路径规划摘要:水面无人船全局路径规划是无人船自主导航技术中的重要内容,对于提高无人船的路径规划和避碰能力非常关键。
本论文主要针对传统A*算法存在的问题进行改进,提出了一种基于改进A*算法的水面无人船全局路径规划方法。
通过引入启发式函数和避碰策略,提高了路径规划的效果和避碰能力。
实验结果表明,该方法能够有效地规划船只的全局路径。
1.引言无人船自主导航技术已经在水面交通、海洋资源开发等领域得到广泛应用。
全局路径规划作为无人船导航的核心任务之一,直接影响着无人船的路径规划效果和避碰能力。
2.改进A*算法2.1传统A*算法传统A*算法是一种常用的算法,通过评估节点的代价函数,寻找到当前节点周围最佳的下一个节点,从而实现路径规划。
然而,传统A*算法在水面无人船全局路径规划中存在一些问题,主要体现在以下两个方面:2.1.1启发式函数不准确传统A*算法的启发式函数只考虑了地图中各节点之间的曼哈顿距离或欧式距离,无法考虑到水体流速、水流方向等实际导航因素,导致路径规划结果不准确。
2.1.2缺乏避碰策略传统A*算法没有合理的避碰策略,当存在障碍物时,很可能引发碰撞事故。
2.2基于改进A*算法的水面无人船全局路径规划方法为了解决传统A*算法存在的问题,本论文提出了一种改进A*算法。
具体改进内容如下:2.2.1引入启发式函数为了提高路径规划的准确性,引入了更加准确的启发式函数。
启发式函数基于水体流速、水流方向以及设定的目标节点,综合考虑了更多实际导航因素,使得路径规划更加贴近实际导航情况。
2.2.2设计避碰策略为了保证无人船能够避免障碍物,设计了一套避碰策略。
当传统A*算法到一些节点时,会判断当前节点是否与障碍物发生碰撞的风险,如果存在碰撞风险,则选择其他最佳节点。
通过避碰策略,可以有效降低碰撞事故的发生率。
3.实验结果与分析通过在实际水域进行路径规划实验,评估了改进A*算法的性能。
基于航海雷达的无人艇路径规划算法研究

1、优化航海雷达数据处理算法,提高数据质量和精度,以获得更加准确的 无人艇位置和速度信息;
2、结合深度学习等先进技术,设计更加智能的路径规划算法,提高算法的 自适应性和鲁棒性;
3、研究更加全面的环境建模方法,考虑到无开展更多实际场景下的实验验证,以检验算法的实用性和可靠性。
为了验证本次演示提出的基于航海雷达的水面无人艇局部路径规划方法的有 效性,设计了一系列实验。实验中,采用了一艘实际运行的水面无人艇和航海雷 达进行数据采集和路径规划。实验结果表明,本次演示提出的路径规划方法可以 有效地规避障碍物,规划出安全、高效的局部路径,并且具有较快的计算速度和 良好的实时性。
最后,数据显示方面,需要将处理后的数据以简洁明了的方式呈现在无人水 面艇的控制台上,以便船长或自动驾驶系统能够快速做出判断和决策。
四、路径规划的研究方法
基于电子海图和航海雷达的无人水面艇路径规划需要结合具体的研究方法。 传统路径规划算法、自适应路径规划算法和强化学习路径规划算法各有特点,需 要根据具体的应用场景选择合适的算法。
为了实现基于航海雷达的水面无人艇局部路径规划,首先需要利用航海雷达 获取周围海域的环境信息,包括障碍物位置、航道情况等。接下来,利用合适的 路径规划算法对获取的环境信息进行分析和处理,计算出安全、高效的局部路径。 在路径规划过程中,需要考虑到无人艇的动力学约束、航速、航向等因素,以确 保规划出的路径具有可执行性。
文献综述
目前,航海雷达在无人艇路径规划方面的应用研究已取得了一些成果。在传 统的航海雷达数据处理中,多采用卡曼滤波或其他滤波算法对雷达数据进行平滑 处理,以减小雷达数据中的噪声干扰。此外,部分研究将航海雷达与GPS、惯性 测量单元(IMU)等传感器进行数据融合,以提高无人艇的位置和速度估计精度。
基于强化学习的无人船自主避障路径规划

基于强化学习的无人船自主避障路径规划一、无人船自主避障路径规划概述无人船技术近年来在海洋探索、环境监测、货物运输等领域得到了广泛的应用。
随着技术的发展,无人船的自主性变得越来越重要,尤其是在复杂多变的海洋环境中,自主避障路径规划成为无人船技术的核心之一。
基于强化学习的无人船自主避障路径规划,是指通过机器学习的方法,使无人船能够在未知或动态变化的环境中自主学习并规划出避开障碍物的最优路径。
1.1 无人船自主避障路径规划的重要性无人船在执行任务时,需要面对各种海洋环境的挑战,如礁石、漂浮物、其他船只等。
有效的自主避障路径规划能够确保无人船安全、高效地完成任务,减少因碰撞或搁浅导致的损失。
此外,自主避障路径规划还能提高无人船的作业效率,优化资源分配,降低人为干预的需求。
1.2 无人船自主避障路径规划的应用场景无人船自主避障路径规划的应用场景非常广泛,包括但不限于以下几个方面:- 海洋环境监测:无人船可以搭载传感器,对海洋环境进行长期监测,自主规划路径避开障碍,确保数据采集的连续性和准确性。
- 货物运输:在特定的水域内,无人船可以自主规划路径,避开障碍物,提高运输效率和安全性。
- 搜救行动:在紧急搜救任务中,无人船能够快速规划出避开障碍物的路径,及时到达目标区域进行搜救。
二、基于强化学习的无人船自主避障路径规划强化学习是一种无模型的学习方法,通过与环境的交互来学习策略,以最大化累积奖励。
在无人船自主避障路径规划中,强化学习可以用于学习如何在复杂的海洋环境中做出最优决策。
2.1 强化学习的基本框架强化学习的基本框架包括智能体(Agent)、环境(Environment)、状态(State)、动作(Action)、奖励(Reward)和策略(Policy)。
智能体在环境中通过执行动作来改变状态,并根据状态转移获得奖励。
智能体的目标是学习一个策略,以最大化长期累积的奖励。
2.2 强化学习在无人船自主避障路径规划中的应用在无人船自主避障路径规划中,智能体可以是无人船的控制系统,环境是海洋环境,状态可以是无人船的位置和速度,动作是无人船的控制指令,奖励可以是避障成功与否的反馈,策略则是无人船的避障决策规则。
针对多域协调的水下无人船路径规划及轨迹追踪研究
科学技术创新2021.04针对多域协调的水下无人船路径规划及轨迹追踪研究赵永鹏(贵州大学机械工程学院,贵州贵阳550025)1概述近年来,随着人类对海洋的勘探开发日益频繁,水下定位技术在铺设海底光缆线路、获取大规模海洋空间和环境数据、勘探开发海洋资源等领域呈现多样化。
人们在实际应用中对定位设备的性能、精度、成本和安全性都提出了更高的要求。
水下无人船是一种携带传感器的无缆平台,能够在靠近海床的高度进行测量。
将传感器承载平台靠近海底可以显著提高采集数据的分辨率。
选择合适的控制策略,充分了解运动关系,对潜艇制导导航系统的设计和研制具有重要意义。
然而,与此相关的大多数流行研究都集中在一些简化的非线性运动关系的降阶。
典型地,潜艇的任务设计过程包括三个主要的挑战组成部分:方向舵尺寸的优化(在设计状态下决定);潜艇自动驾驶仪的设计,以保证在物理允许的情况下平稳操作,以减少液压油的消耗,从而减少噪音的产生,并减少在复杂情况下(例如,沿海水域、导弹发射或侵略性采矿)过度运动所造成的脆弱性。
2模型建立2.1定位模型测距定位系统一般是由导航控制单元、发射换能器、水听器和应答器四部分组成。
在实际工作中,还需要无人船、G PS系统、计算机等。
发射换能器和水听器一般安装在船底或船侧,应答器固定在水下节点。
单点测距定位系统的工作原理:导航控制单元产生的询问电信号。
发射换能器将电信号转换为声学信号,并将其发射到水中。
当应答器接收到询问信号时,它将发出带有时间戳的响应信号。
图1四种不同的情况涉及顶部声学定位系统与前文所述一样,U SBL系统根据声学条件包含固有偏差,没有充分考虑所有的偏差来源。
通常,我们在这种情况下的操作程度是不同的。
(1)我们另外取矩阵R2∈SO(2)表示可能时变航向下在(水平)平面上的旋转矩阵:(2)斜对称矩阵S(λ)∈SS(3)为向量叉积算子,旋转矩阵R p(f(θ))对一个角度θ关于主轴的导数等价于矩阵乘以一个斜对称矩阵,其中E是对应于主轴的基向量。
无人水面艇避障路径规划算法综述
第37卷第8期 计算机应用与软件Vol 37No.82020年8月 ComputerApplicationsandSoftwareAug.2020无人水面艇避障路径规划算法综述刘 佳 王 杰(南京信息工程大学自动化学院BDAT&CICAEET 江苏南京210044)收稿日期:2019-06-10。
国家重点研发计划重点专项课题(2018YFC1405703)。
刘佳,副教授,主研领域:智能仪器。
王杰,硕士生。
摘 要 根据无人水面艇对环境信息的已知程度,将现有避障路径方法分为全局路径规划和局部路径规划。
根据不同的类别探讨典型路径规划算法的优点以及存在的问题,并进行对比分析;描述了相应的改进算法在无人水面艇路径规划方面取得了新的研究成果;展望了对无人水面艇避障路径规划的研究方向。
关键词 无人水面艇 路径规划 避障中图分类号 TP18 文献标志码 A DOI:10.3969/j.issn.1000 386x.2020.08.001OVERVIEWOFOBSTACLEAVOIDANCEPATHPLANNINGALGORITHMFORUNMANNEDSURFACEVEHICLELiuJia WangJie(BDAT&CICAEET,SchoolofAutomation,NanjingUniversityofInformationScienceandTechnology,Nanjing210044,Jiangsu,China)Abstract Accordingtotheknowndegreeofenvironmentalinformationofunmannedsurfacevehicles,thecurrentmethodsofobstacleavoidancepathareclassifiedinthispaper,includingglobalpathplanningandlocalpathplanning.Theadvantagesandproblemsoftypicalpathplanningalgorithmswerediscussedaccordingtodifferentcategories,andthesealgorithmswerecomparedandanalyzed.Thelatestresearchresultsofthecorrespondingimprovedalgorithminthepathplanningofunmannedsurfacevehiclesweredescribed.Finally,thispaperforecastedthedevelopmenttendencyoftheobstacleavoidancepathplanningofunmannedsurfacevehicles.Keywords Unmannedsurfacevehicles Pathplanning Obstacleavoidance0 引 言无人水面艇(UnmannedSurfaceVehicle,USV)也可称为水面无人艇或水面机器人,是一种无人操作的水面舰艇,主要用于执行危险以及不适合有人船只执行的任务[1]。
基于人工蜂群算法的无人潜艇路径规划算法研究
基于人工蜂群算法的无人潜艇路径规划算法研究无人潜艇(Unmanned Underwater Vehicle,简称UUV)作为一种具有自主控制能力的水下机器人,已经在海洋科学研究、水下勘探、海底资源开发等领域得到广泛应用。
路径规划是无人潜艇任务中的重要环节之一,其目的是确定最优的航行路径,以达到高效率、安全性和准确性。
本文将探究基于人工蜂群算法的无人潜艇路径规划算法,并给出相关研究成果。
一、引言随着科技的进步和人们对海洋资源的深入挖掘,无人潜艇在海洋领域扮演了重要角色。
而无人潜艇执行任务时,如何规划最优路径成为了一个研究热点。
传统的路径规划算法存在着计算复杂度高、易陷入局部最优等问题。
而人工蜂群算法(Artificial Bee Colony Algorithm,简称ABC算法)作为一种新型的启发式算法,通过蜜蜂采食的行为模拟寻找最优解,具有计算简单、全局搜索能力强的优点。
因此,将人工蜂群算法应用于无人潜艇路径规划算法的研究具有重要意义。
二、人工蜂群算法概述人工蜂群算法是一种模拟自然界中蜜蜂觅食行为的启发式算法。
在算法中,将问题抽象为搜索最优解的过程,其中包括对解空间的划分、蜜蜂的行为以及解的更新等步骤。
蜂群中的蜜蜂可以分为三类:雇佣蜜蜂(Employed Bees)、观察蜜蜂(Onlooker Bees)和侦查蜜蜂(Scout Bees)。
雇佣蜜蜂通过在解空间中搜索新的解,并与其他雇佣蜜蜂交换信息,从而更新最优解。
观察蜜蜂根据雇佣蜜蜂的进展情况选择相关的雇佣蜜蜂进行信息获取。
侦查蜜蜂负责在局部搜索空间中进行探索,并克服可能陷入局部最优解的问题。
通过这种方式,人工蜂群算法具有全局搜索和局部优化相结合的特点。
三、基于人工蜂群算法的无人潜艇路径规划算法基于人工蜂群算法的无人潜艇路径规划算法可以分为以下几个步骤:1. 无人潜艇环境建模:将无人潜艇需要覆盖的海域划分成离散的网格,在每个网格中设置代表无人潜艇航行状态的节点。
无人船舶的自主导航与路径规划研究
无人船舶的自主导航与路径规划研究无人船舶的自主导航与路径规划是无人船舶技术领域中的重要研究方向。
随着科技的不断进步,无人船舶作为一种具有巨大潜力的航行工具,正逐渐得到广泛应用。
然而,无人船舶的自主导航与路径规划是一个复杂的问题,涉及到多个学科领域,需要综合运用传感器技术、算法优化和智能系统等多种技术手段,以实现高效、安全、可靠的航行。
一、无人船舶的自主导航技术无人船舶的自主导航技术是指无人船舶根据环境信息,自主完成航行任务的能力。
在自主导航过程中,需要综合利用多种传感器技术,如全球导航卫星系统(GNSS)和惯性导航系统(INS)等,以获取准确的位置、速度和姿态信息。
同时,还需要结合地图数据和环境感知技术,如激光雷达和摄像头等,对周围环境进行感知和识别。
通过对传感器数据的融合与处理,可以实现无人船舶在不同环境下的航行、避障和目标追踪等功能。
二、无人船舶的路径规划算法无人船舶的路径规划算法是指根据航行任务和环境约束,为无人船舶制定合理的航行路径的方法和策略。
路径规划算法的核心是在考虑航行安全的前提下,实现最佳航行效果。
常用的无人船舶路径规划算法包括基于启发式搜索的A*算法、遗传算法、模拟退火算法、人工势场法等。
这些算法可以根据目标位置、环境约束和航行任务要求,选取合适的路径,并通过动态调整来应对不同的情况,以实现无人船舶的高效航行。
三、无人船舶的协同导航与路径规划研究无人船舶的协同导航与路径规划是指多艘无人船舶在同一个航行区域内,通过合理协作和集体决策,实现集群化航行和任务执行的研究。
在协同导航与路径规划中,无人船舶之间需要实现信息的共享和通信,以实现任务的协同执行。
此外,还需要考虑无人船舶之间的碰撞规避和队形控制等问题。
协同导航与路径规划的研究将有效提高无人船舶的航行效率和工作能力,并为未来无人船舶系统的发展提供支持。
四、无人船舶的自主决策与智能系统无人船舶的自主决策与智能系统是指无人船舶通过分析航行环境、感知船舶状态和预测目标行为等,自主做出决策的能力。
无人水面艇目标路径跟踪优化控制研究
基于改进A算法的水面无人艇路径规划
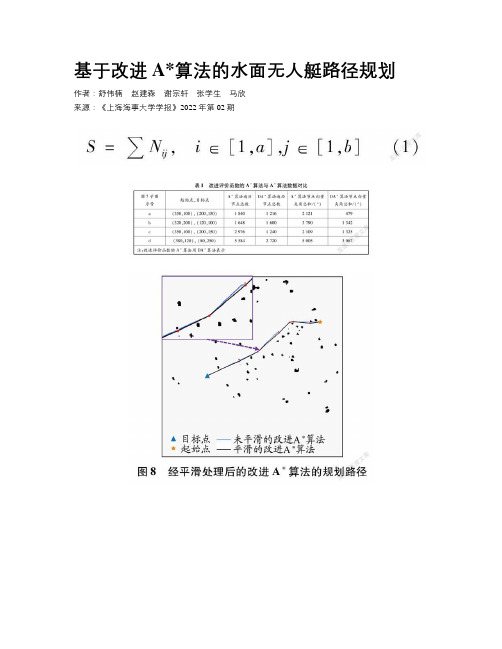
基于改进A*算法的水面无人艇路径规划作者:舒伟楠赵建森谢宗轩张学生马欣来源:《上海海事大学学报》2022年第02期摘要:為解决水面无人艇(unmanned surface vessel, USV)在碍航物比较密集水域的全局路径规划问题,提出一种基于改进A*算法的路径规划方法。
利用像素阈值法剔除船载雷达图像中的冗余信息,并使用栅格法进行环境建模;提出节点碍航物检测法,用于优化无人艇路径规划,同时改进评价函数来减少遍历的节点总数;对规划路径上的冗余节点进行平滑处理。
仿真结果表明:相较于A*算法,本文提出的改进A*算法能够确保USV远离碍航物,且算法遍历节点总数和规划路径上的转折点都较少。
关键词:水面无人艇(USV); 路径规划; A*算法; 碍航物检测中图分类号: U675.7; TP273文献标志码: APath planning for unmanned surface vessels based onimproved A* algorithmAbstract: To address the global path planning issue of unmanned surface vessels (USVs) in waters with dense obstacles, this paper proposes a path planning method based on the improved A* algorithm. The redundant information of shipborne radar images is removed by the pixel threshold method, and the grid method is used to carry out the environment modeling. The node obstacle detection method is proposed to optimize the path planning of USVs, and the evaluation function is improved to reduce the total number of traversal nodes. The redundant nodes on the planned path aresmoothed. The simulation results show that, compared with A* algorithm, the proposed improved A* algorithm can ensure that USVs are away from obstacles, the total number of traversal nodes is fewer, and the turning nodes on the planned path are fewer.Key words: unmanned surface vessel (USV); path planning; A* algorithm; obstacle detection引言随着人工智能技术的快速发展,路径规划在移动机器人领域的应用取得了很大的成就。
自主水面航行器的路径规划研究
自主水面航行器的路径规划研究自主水面航行器(Autonomous Surface Vehicle,ASV)作为一种能够在水面上自主航行并执行任务的智能装备,在海洋监测、资源勘探、环境监测、军事侦察等众多领域发挥着越来越重要的作用。
而路径规划是自主水面航行器实现高效、安全、准确完成任务的关键技术之一。
路径规划的目标是在给定的环境条件和任务要求下,为自主水面航行器找到一条从起始点到目标点的最优或近似最优路径。
这不仅需要考虑航行器的运动学和动力学特性,还要充分考虑环境中的各种障碍物、水流、风浪等因素的影响。
在实际应用中,自主水面航行器面临的环境通常是复杂多变且充满不确定性的。
例如,海洋中的暗礁、浅滩、岛屿等地理障碍,以及突发的恶劣天气、海流变化等,都可能对航行器的航行路径产生影响。
因此,路径规划算法需要具备强大的适应性和鲁棒性,能够实时处理各种突发情况,并根据环境变化及时调整路径。
目前,常见的自主水面航行器路径规划方法主要包括基于几何模型的方法、基于图搜索的方法、基于智能算法的方法等。
基于几何模型的方法通常将环境简化为几何形状,如圆形、矩形等,然后通过计算几何关系来确定路径。
这种方法简单直观,但对于复杂环境的适应性较差。
基于图搜索的方法,如 A算法、Dijkstra 算法等,通过构建环境的图模型,并在图中搜索最优路径。
这些算法在处理静态环境和确定性问题时表现较好,但在面对动态环境和不确定性时,可能会出现效率低下和路径不够优化的情况。
基于智能算法的方法,如遗传算法、粒子群优化算法、蚁群算法等,则是模拟生物的智能行为来寻找最优路径。
这类方法具有较强的全局搜索能力和适应性,能够处理复杂的多约束优化问题,但计算量较大,实时性可能受到一定影响。
为了提高路径规划的性能,研究人员还在不断探索新的方法和技术。
例如,将多种方法相结合,取长补短,以获得更优的路径规划结果。
同时,利用传感器融合技术,综合多种传感器获取的环境信息,提高环境感知的准确性和完整性,从而为路径规划提供更可靠的依据。
水面无人艇集群编队控制技术综述
ys
f
o
rma
t
i
onc
on
t
r
o
lc
ommun
i
c
a
t
i
ont
e
chno
l
ogyandcoope
r
a
t
i
vef
o
rma
t
i
onc
on
t
r
o
lt
e
chno
l
ogyunde
r
,
he
t
e
r
ogeneousc
ond
i
t
i
ons t
her
e
s
e
a
r
chp
r
og
r
e
s
so
fswa
rmf
o
rma
t
i
oncon
1989
通信作者:韩玮(
1980
-),男,博士,研究员,主要从事无人系统总体技术方面的研究。
导航定位与授时
2023 年 9 月
8
0 引言
海洋因其拥有丰 富 的 油 气 资 源、矿 物 资 源 和 生
rmf
o
rma
t
i
onc
on
t
r
o
lt
e
chno
l
ogyo
fUSVs
. Andf
r
omt
hea
spe
c
t
so
ft
i
c
a
lf
o
rma
t
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
水面无人艇路径规划研究综述*大连海事大学航海学院陈华张新宇摘要:水面无人艇(unmanned surface vessel, USV)近年来受到国内外专家学者越来越多的关注。
为了总结分析USV现有路径规划方法及其优缺点,通过对USV路径规划研究进行分类综述和分析,从获取环境空间障碍物的方式,将USV路径规划分为基于海洋环境信息的全局路径规划和基于传感器信息的局部路径规划。
总结基于各类研究方法的主要研究成果及其主要特点,剖析其存在的主要问题,阐明USV路径规划的研究思想和意义,提出USV路径规划今后可能的发展方向。
关键词:USV;路径规划;海上交通一引言随着现代科学技术的飞速发展,海上智能交通作为我国科技战略的重要组成部分,主要实现船舶的航行自动化和海上交通的智能化管理。
因此,作为海上交通系统的主要个体船舶,对其航行路径的研究,显得尤为重要。
而近年兴起的研究热点--水面无人艇,是一种无人操作的水面舰艇,主要用于执行危险以及不适于有人船只执行的任务[1]。
由于其具有体积小、速度快、智能化和自动化程度高的特点而吸引广大研究人员。
它不仅可以用于军事领域的扫雷、侦察和反潜作战等方面,还可以用于民用领域的水文气象探测、环境监测和海上搜救等方面。
文献[2,3]总结了无人艇的研究历史、现状以及发展趋势。
在水面无人艇研发和使用领域,美国和以色列一直处于领先地位。
位于美国弗吉尼亚州的UOV公司集风能、太阳能和回收动力作为能源而研发了理论上拥有无限续航能力的UOV,适用于海洋数据监测和收集等[4]。
以色列Elbit公司推出了Stingary号USV,它具有船型小、机动灵活、隐蔽性好和智能巡航等优点[5]。
中国对无人艇的研究起步较晚,但庆幸的是,国内对无人艇的研究已经越来越重视。
中国气象局与沈阳航天新光集团共同研制了我国首艘无人驾驶船“天象一号”,它由海上无人探测平台和地面控制系统组成,能满足高海况下工作需求[6]。
目前水面无人艇主要配备的系统包括运动控制系统、传感器系统、通信系统和武装系统。
其中,文献[7]将运动控制系统分为导航定位子系统、路径规划子系统和航迹跟踪子系统。
而路径规划作为无人艇研究的核心问题,在一定程度上代表着无人艇智能化水平的高低。
近年来对无人艇路径规划的研究成为海上智能交通的热点问题。
本文从获取环境空间障碍物的方式,将无人艇路径规划分为基于海洋环境信息的全局路径规划和基于传感器信息的局部路径规划,分别综述其研究方法和成果并深入分析其本质特点和存在的不足,并对无人艇路径规划的发展方向提出几点展望。
二基于海洋环境信息的全局路径规划全局路径规划是基于给定的海洋环境信息(通常指电子海图)来获取无人艇所经过区域的静态障碍物信息的大范围离线路径规划。
为了解决全局路径规划问题,文献[7]将改进势场法与动态栅格法相结合设计了一种势场动态栅格法,通过将栅格动态细化的方式建立环境模型,利用改进势场法来搜索最优路径,通过减少折线来减少多余的路径点,最终达到路径优化的目的。
该方法收敛速度快,能避免传统势场法容易陷入局部极小值问题,但该方法也没有考虑风、浪、流等水文气象因素对路径规划的影响。
文献[8]提出一种基于电子海图的距离寻优Dijkstra算法来解决水面无人艇全局路径规划问题。
为了克服传统Dijkstra 算法占用内存大的问题,该算法使用动态网格模型来减少规划时间,提高规划精度。
但该方法在环境模型的建立时仅仅基于电子海图,没有考虑风、浪、流等水文气象因素对航线设计的影响。
文献[9]利用遗传算法和人工势场法设计了水面无人艇全局路径规划并进行了仿真实验,实验表明该方法能对多种复杂的障碍物环境进行规划,并且具有能在起点周围三面障碍物中寻找最优路径的能力。
但该方法只是针对简单的几何图形和海岸线进行规划,没有引入真正意义上的电子海图。
为了寻找一条最小或者接近最小的全局最优路径,文献[10,11]采用时效性好的A星算法作为路径规划算法,该方法也能找到最优路径,但局限性在于*基金项目:国家自然科学基金项目(51309043),交通运输部应用基础研究项目(2014329225020),中国博士后科学基金项目(2014M551095),辽宁省自然科学基金项目(2014025005),辽宁省高校杰出青年学者成长计划(LJQ2014052),中央高校基本科研业务费专项资金资助项目(3132014202), 辽宁省教育厅重点实验室基础研究项目(LZ2015009)。
无人艇要与即定路径非常近或处在该路径上,这对无人艇的控制系统提出了更高的要求。
文献[12]针对大规模海洋环境条件复杂的特点采用碰撞检测技术和限制搜索区域构建障碍物潜在碰撞集,以达到减小航线规划搜索规模的目的。
基于栅格模型简单及其对不规则障碍物表达能力强的优点,提取障碍物边界信息建立紧凑、高效的环境模型,对障碍物进行离散化处理,充分利用栅格间的邻接关系基于 Elasticity 算法实现最短航线规划。
实验结果表明设计的方法能够满足船舶在复杂的海洋环境中能高效的寻找出最优路径。
但该方法没有考虑到转向次数问题,也没有考虑风浪流等外界环境的影响。
文献[13]提出一种基于可视图法的A星算法用于解决无人艇全局路径规划问题,该方法克服了传统可视图法灵活性差的问题,可以提高规划效率,减少规划时间。
但该算法将无人艇简化成一个质点,没有考虑无人艇的机动性能,同时也没有考虑风浪流的影响。
为了解决大范围环境下的全局路径规划问题,文献[14]设计了分层和激活值相结合以及分层和遗传算法结合的路径规划算法,根据分层思想的特点,结合二维环境,采用十六叉树的环境模型建立每一层地图,在每层地图中建立各个区域的邻接关系,确定子起点和子终点。
但该方法只是基于真实的海图,没有基于真正意义上的电子海图,也没有考虑风浪流等复杂环境因素的影响。
总之,无人艇全局路径规划的研究思路为:从电子海图中获取本航次所要经过海区的静态障碍信息,包括岸线、岛屿、暗礁和沉船等。
然后采用A星算法、距离寻优Dijkstra算法、遗传算法和人工势场法等方法找出从起点到终点的无碰路径。
一般采用离线的方法,即在无人艇开航前就设定好航线。
但从目前现有的方法来看,大都没有考虑风、浪、流等水文气象因素对航线设计的影响。
三基于传感器信息的局部路径规划局部路径规划是根据AIS获取附近船舶信息或者根据雷达等传感装置探测周围障碍物信息的小范围在线路径规划。
障碍物通常是动态的船舶或者电子海图未显示的静态障碍物。
英国的Wasif Naeeml[15]等基于哈默斯坦和维纳模型,采用遗传算法非线性预测控制的思想来对无人艇进行实时局部路径规划,它是一个两输入单输出的系统。
Canny和Reif[16]证明了在平面内限定动态障碍物速度的路径规划是NP问题。
研究仍没有发现可以得到USV需要的接近于实时计算的最优方案。
文献[17]采用基于模糊理论改进的ND方法规避局部危险,并采用Q学习机制和同时更新相似海风状态的Q值来提高收敛速度。
该方法主要的贡献是打破了传统忽略风浪流影响的研究方法,在考虑外界因素上迈进了一步,但由于海面环境的复杂性,该方法也只是考虑了二维风的影响,而实际的海风是三维的,也没有考虑海浪和海流等因素的影响。
文献[18,19]根据来船的航向和相对方位判断两船的会遇态势,根据来船的距离和速度,不同的会遇态势生成不同的会遇安全领域,进而采用进化算法生成安全路径。
该方法融合了国际海上避碰规则的追越、交叉相遇和对遇条款,摒弃了传统的根据两船DCPA和TCPA判断紧迫局面的方法,而是采用规定好的来船相对方位和航向判断会遇态势,智能的生成安全领域和航行路径。
该方法简单易行,执行效率高,能快速的生成满足要求的优化路径,但该方法将无人艇简化为一个质点,没有考虑无人艇的机动性能,也没有考虑海风、海浪和海流的影响。
为了解决无人艇同时会遇多艘船舶问题,文献[20]提出基于国际海上避碰规则(International Regulations for Preventing Collisions at Sea,以下简称避碰规则)的确定性协同路径规划算法,该算法能使无人艇在会遇多艘船舶时能成功避让并寻找出最优路径,文中从不同的角度验证了算法的一致性和有效性,但该算法也没有考虑风浪流的影响。
根据动态障碍物的规避问题,文献[21]提出基于海事规则的局部路径规划方法,该方法将动态障碍物在某一瞬时转换为相对无人艇静止的状态,并用粒子群算法以避碰规则为约束条件进行求解,通过仿真结果表明,该方法能有效规避动态障碍物,得到合理的规避策略。
但由于障碍物运动状态的不确定性,预测的障碍物信息难免出现不准确的情况。
为了解决复杂海况下的危险规避问题,文献[22]以Sarsa在线策略强化学习算法为基础,提出了USV在复杂海况下的自适应危险规避决策模型,并以渐进贪心策略作为行为探索策略,证明了USV自适应危险规避决策过程能够以概率1收敛到最优行为策略,论证结果表明,采用在线策略强化学习算法提升USV在复杂海况下的危险规避性能是可行的。
对现有文献的综述发现,无人艇局部路径规划可以分为融合避碰规则和不考虑避碰规则两类。
融合避碰规则的局部路径规划中,大都采用速度避障法,该方法对来船能成功避让,但对于未知障碍为静态障碍并不适用。
不考虑避碰规则的局部路径规划中,将来船视为其他动态障碍,即无论来船的航向和航速如何,无人艇都对其进行避让,这会使无人艇在海上航行时,当需要来船采取避让行动的时候,无人艇也采取了避让行动,这会使两船行为的不协调,容易引起碰撞事故的发生。
四无人艇路径规划的发展方向为深入研究无人艇路径规划中的建模问题,笔者认为以下可能的发展方向应该受到重视。
(一)针对无人艇路径规划中的环境建模问题,应考虑加入风、浪和流等外界因素的干扰。
通过模拟,实测和咨询专家等方式获取比较可靠的数据,将获得的数据对模型进行验证。
(二)在无人艇会遇他船时,在采取避让行动时应考虑无人艇碰撞危险度问题,目前并无权威的无人艇碰撞危险度模型,因此可以参考现有船舶的碰撞危险度,根据无人艇的实际情况,构建无人艇碰撞危险度。
(三)人工智能方法具有快速寻优的优点,已在建模、数字信号和图像处理等方面得到了广泛的应用,但在无人艇路径规划中,基于智能技术的路径规划远未发挥现有智能信息处理技术的优势,还需深入研究。
五结语水面无人艇无论在民用领域还是军事领域都发挥着不可估量的重要作用,是一个国家大力发展海洋强国战略不可或缺的有力武器。
为推动无人艇路径规划的深入研究和广泛应用,本文从获得障碍物信息方式的角度,对现有路径规划方法进行分类综述和分析,总结出各类研究方法的现有成果和主要优缺点,剖析存在的问题。
在此基础上,提出无人艇路径规划具有重要理论意义和实际应用价值的发展方向。