自动控制理论试卷B答案
东大14秋自动控制原理 (B)答案

2、传递函数适合哪类控制系统?如何定义?(10分)
答: 传递函数适合线性连续系统。其定义为:零初始条件下,输出量的拉氏变换与输入量的拉氏变换之比。
3、通常有哪几种减小稳态误差的途径?(10分)
答:1、增大系统开环增益或扰动之前系统的前向通道增益。
2、在系统的前向通道或主反馈通道设置串联积分环节。 3、采用串级控制抑制内回路扰动。
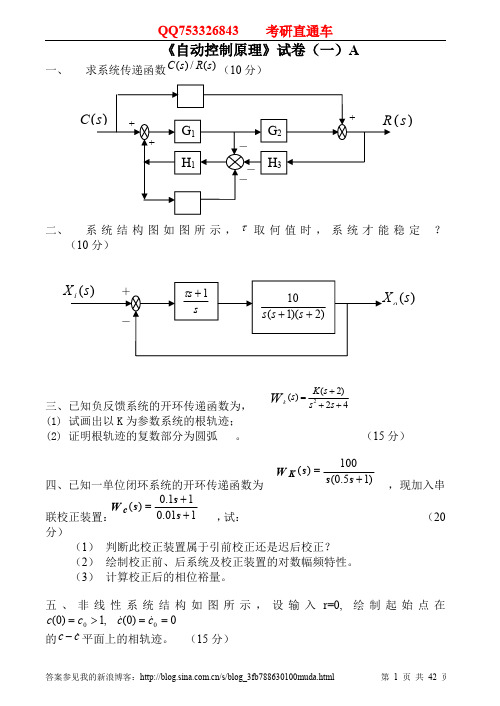
二、(20分)控制系统的动态结构图如图1所示,试求系统输出Y(s)对输入信号R(s)和扰动
信号N(s)的传递函数Y(s)/ R(s)、 Y(s)/ N(s)。
课程名称: 自动控制原置和调节机构组成。执行机构直接作用于控制对象,使被
控制量达到所要求的数值。
(3)检测装置或传感器—— 该装置用来检测被控制量,并将其转换为与给定量相同的物理
量。
(4)给定环节—— 设定被控制量的给定值的装置。
(5)比较环节—— 将所检测的被控制量与给定量进行比较,确定两者之间的偏差量。 (6)中间环节—— 一般包括比较环节和校正环节。
学习中心: 院校学号: 姓名
东 北 大 学 继 续 教 育 学 院
试 卷(作业考核 线下)(共 4 页)
1、自动控制系统由哪些基本环节组成?各环节的功能是什么?(10分) 答:(1)控制对象或调节对象——要进行控制的设备或过程。
自动控制原理考试试题及答案(整理版)
自动控制原理考试复习题整理1.开环、闭环系统的最主要区别是()。
A.反馈 B.输入信号C.被控对象 D.干扰参考答案:A2.下图所示系统属于()。
A.恒值控制系统 B.开环系统C.程序控制系统 D.随动系统参考答案:D3.系统采用负反馈形式连接后,则 ( )。
A.一定能使闭环系统稳定B.系统动态性能一定会提高C.一定能使干扰引起的误差逐渐减小,最后完全消除D.需要调整系统的结构参数,才能改善系统性能参考答案:D4.直接对对象进行操作的元件称为()。
A.比较元件 B.给定元件C.执行元件 D.放大元件参考答案:C5.如果被调量随着给定量的变化而变化,这种控制系统叫()。
A.恒值调节系统B.随动系统C.连续控制系统D.数字控制系统参考答案:B6.随动系统对()要求较高。
A.快速性B.稳定性C.准确性D.振荡次数参考答案:A7.主要用于产生输入信号的元件称为()A.比较元件B.给定元件C.反馈元件D.放大元件参考答案:B8.自动控制系统的主要特征是()。
A.在结构上具有反馈装置并按负反馈组成系统,以求得偏差信号B.由偏差产生控制作用以便纠正偏差C.控制的目的是减少或消除偏差D.系统开环参考答案:ABC9.自动控制系统按输入信号特征可分为()。
A.恒值控制系统 B.程序控制系统C.线性系统 D.随动系统参考答案:ABD10.自动控制系统按描述元件的动态方程分()。
A.随动系统 B.恒值控制系统C.线性系统 D.非线性系统参考答案:CD11.自动控制系统的基本要求()。
A.稳定性 B.快速性C.准确性 D.安全性参考答案:ABC12.人工控制与自动控制系统最大的区别在于控制过程中是否有人参与。
()参考答案:√第二章控制系统的教学模型1.下图所示电路的微分方程是()。
A.B.C.D.参考答案:A2.下图所示电路的传递函数是()。
A.B.C.D.参考答案:A3.关于传递函数,错误的说法是()。
A 传递函数只适用于线性定常系统;B 传递函数不仅取决于系统的结构参数,给定输入和扰动对传递函数也有影响;C 传递函数一般是为复变量s的真分式;D 闭环传递函数的极点决定了系统的稳定性。
安徽大学期末试卷09-10年度第一学期《自动控制原理》考卷B卷答案
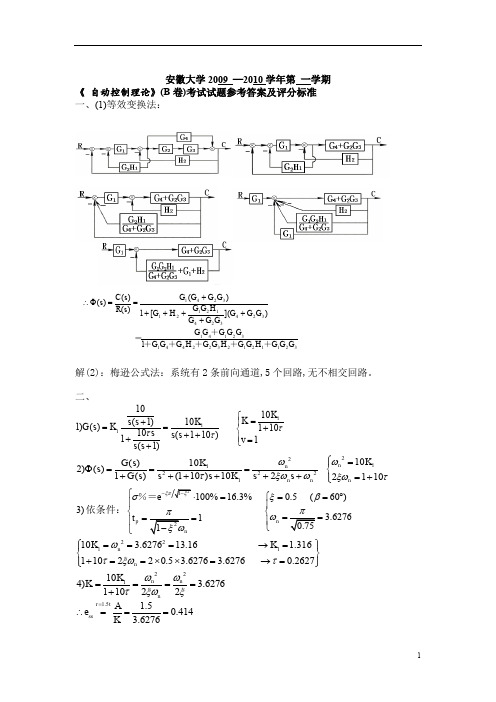
安徽大学2009 —2010学年第 一学期《 自动控制理论》(B 卷)考试试题参考答案及评分标准 一、(1)等效变换法:解(2):梅逊公式法:系统有2条前向通道,5个回路,无不相交回路。
二、111101010(1)1)() 11010(110)11(1)K K K s s G s K s s s v s s τττ⎧=+⎪==+⎨++⎪+=⎩+221122211010()2)() 1()(110)1022110n n n n n K K G s s G s s s K s s ωωτξωωξωτ⎧=⎪Φ===⎨++++++=+⎪⎩ 3)依条件:0.5 (60)100%16.3% 3.62761n p e t ξβσω-⎧==︒=⎧⎪⎪⎨⎨====⎪⎪⎩⎩%= 221110 3.627613.16 1.316110220.5 3.6276 3.6276 0.2627n n K K ωτξωτ⎧⎫===→=⎪⎪⎨⎬+==⨯⨯=→=⎪⎪⎩⎭221104) 3.627611022n n n K K ωωτξωξ====+1.5 1.50.4143.6276r t ss A e K =∴===3211212322441321413243241212132411)]([1)()()()(G G G H G G H G G H G G G G G G G G G G G G G G H G G H G G G G G s R s C s ++++++ =++++++==Φ∴三、(1)特征方程为()10(1)10(2)(1)10(2)(1)1(2)D s GH K s s s K s s s K s s s =+=-+=+-=+-=+换算成首一多项式,为:-根轨迹方程为: 由此可知,需要绘制零度根轨迹。
分离点的计算:12()()02.732,0.732dG sH s dss s ===- (2)由特征方程求取根轨迹与虚轴的交点,1,2s =±此时闭环系统临界稳定,出现等幅振荡,所对应的K =2。
自动控制理论B答案
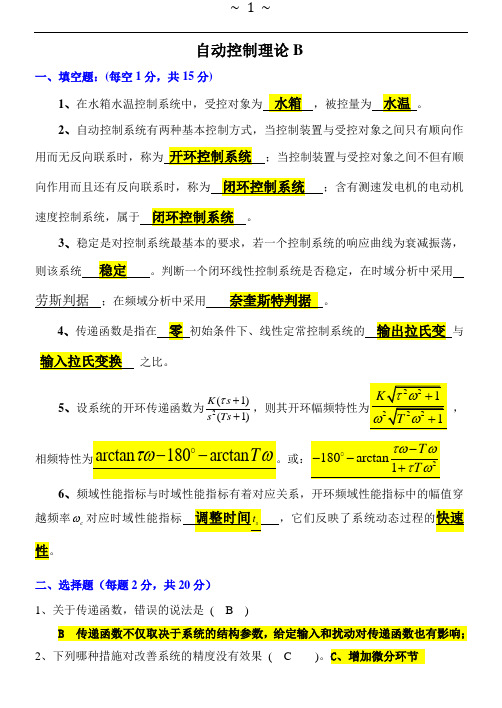
自动控制理论B一、填空题:(每空1分,共15分)1、2、自动控制系统有两种基本控制方式,当控制装置与受控对象之间只有顺向作3、稳定是对控制系统最基本的要求,若一个控制系统的响应曲线为衰减振荡,。
判断一个闭环线性控制系统是否稳定,在时域分析中采用劳斯判据 ;在频域分析中采用4、之比。
5、设系统的开环传递函数为2(1)(1)K s s Ts τ++,6、频域性能指标与时域性能指标有着对应关系,开环频域性能指标中的幅值穿越频率c ω二、选择题(每题2分,共20分) 1、关于传递函数,错误的说法是 ( B )B 传递函数不仅取决于系统的结构参数,给定输入和扰动对传递函数也有影响; 2、下列哪种措施对改善系统的精度没有效果 (C )。
C 、增加微分环节4、已知系统的开环传递函数为50(21)(5)s s ++,则该系统的开环增益为 ( C )。
C 、105、若某系统的根轨迹有两个起点位于原点,则说明该系统( B ) 。
B 、含两个积分环节6、开环频域性能指标中的相角裕度γ对应时域性能指标( A ) 。
A 、超调%σ7、已知某些系统的开环传递函数如下,属于最小相位系统的是( B8、若系统增加合适的开环零点,则下列说法不正确的是 ( B ) B 、会增加系统的信噪比;9、开环对数幅频特性的低频段决定了系统的( A )。
A 、稳态精度10、下列系统中属于不稳定的系统是( D )。
D 、脉冲响应为0.4()8t h t e =的系统三、(共24分)设系统闭环传递函数22()1()()21C s s R s T s Ts ξΦ==++,试求:1、0.2ξ=;s T 08.0=; 0.8ξ=;s T 08.0=时单位阶跃响应的超调量%σ、调节时间s t 及峰值时间p t 。
(9分) 解:系统的闭环传函的标准形式为:222221()212n n n s T s Ts s s ωξξωωΦ==++++,其中1nTω=当 0.20.08T s ξ=⎧⎨=⎩ 时,0.2%52.7%4440.08 1.60.20.26s n p d ee T t s t s πξπσξωξπω--⎧⎪===⎪⎪⨯⎪====⎨⎪⎪=====⎪⎪⎩当0.80.08T sξ=⎧⎨=⎩时,0.8% 1.5%4440.080.40.80.42snpde eTt st sπξπσξωξπω--⎧⎪===⎪⎪⨯⎪====⎨⎪⎪=====⎪⎪⎩2、4.0=ξ;sT04.0=和4.0=ξ;sT16.0=时单位阶跃响应的超调量%σ、调节时间st和峰值时间p t。
自动控制理论试题及答案
自动控制理论试题及答案一、选择题1. 在自动控制系统中,调节器的作用是:A. 检测被控对象的信息并传递给控制器B. 把控制器的输出信号转化为执行机构的动作C. 对系统进行建模和参数辨识D. 对系统的稳定性和性能进行分析和设计2. 控制系统中的“控制器”是指:A. 传感器B. 执行机构C. 调节器D. PID调节器3. 在自动控制系统中,反馈环节的作用是:A. 改善系统的鲁棒性B. 提高系统动态性能C. 校正系统的静态误差D. 抑制系统的振荡4. 关于PID控制器的描述,以下哪个是正确的?A. 仅由比例项组成B. 仅由积分项组成C. 仅由微分项组成D. 由比例项、积分项和微分项组成5. 对于一阶惯性环节,其传递函数形式为:A. G(s) = K/(Ts + 1)B. G(s) = K/(sT + 1)C. G(s) = K/(s + T)D. G(s) = K/(s + 1)二、填空题1. 按照惯例,控制系统的输入信号通常表示为______,输出信号通常表示为______。
2. 控制系统的闭环传递函数由开环传递函数和______组成。
3. 控制系统的校正系数是指在单位______条件下,系统输出与输入的______比值。
4. 控制系统的性能指标包括超调量、上升时间、______时间和稳态误差等。
5. 自动控制理论包括频率域分析、______分析和状态空间分析等方法。
三、简答题1. 简述PID控制器的工作原理及基本调节方法。
2. 什么是系统的稳定性?常用的稳定性判据有哪些?3. 请解释闭环控制系统中的超调量、上升时间、峰值时间和调节时间的概念。
4. 什么是系统的校正系数?如何通过调节PID参数来改变系统的校正系数?5. 简述频率域分析法在控制系统分析中的应用,并说明如何绘制Bode图。
四、计算题1. 给定一个PID控制器的传递函数为:Gc(s) = Kp + Ki/s + Kds,试求其闭环传递函数表达式。
自动控制原理试卷及答案

1《自动控制原理》试卷(A 卷)一、 用运算放大器组成的有源电网络如图所示,试采用复数阻抗法写出它的传递函数。
(10分)(1图 )(3图)二、假设某系统对于单位阶跃输入信号的响应为t t e e t y 10602.12.01)(---+= 。
(a) 求该系统的闭环传递函数。
(b) 确定该系统的阻尼系数。
(10分)三、试用梅逊增益公式求图中系统的闭环传递函数。
(写出步骤)(10分)四、控制系统的结构如图所示,设 r(t ) = t ⋅ 1(t ) ,p (t ) = 1(t )定义e (t ) = r(t ))(t y -,试求系统的稳态误差。
(10分)(4图)五、试确定题图所示系统参数K 和ξ的稳定域。
(写步骤)(10分)(5图)六、设单位反馈控制系统的开环传递函数为(1) 绘制根轨迹,并加以简要说明。
(2) 当系统的阻尼振荡频率s rad /1d =ω时试确定闭环主导极点的值与相应的增益值。
(15分)七、最小相位系统的开环对数幅频特性的渐近线如图所示,确定系统的开环传递函数。
(10分)八、已知最小相位系统校正前后系统的折线对数幅频特性如图所示,其中Lo(ω)为校正前特性,L开(ω)为校正后特性。
(1)试作出校正装置的对数幅频特性Lc(ω)(折线);(2)试写出校正装置的传递函数Gc(s);(3)计算校正后系统的相位裕度γ。
(15分)cp为s右半平面上的开环根的个数,v为开九、设开环系统的奈氏曲线如下图所示,其中,环积分环节的个数,试判别闭环系统的稳定性。
(10分)(a)(b)2《自动控制原理》试卷(B 卷)一、 求下图所示系统的传递函数)(/)(0s U s U i 。
(10分)(1图) (3图)二、假设某系统对于单位阶跃输入信号的响应为t t e e t y 10602.12.01)(---+= 。
(a) 求该系统的闭环传递函数。
(b) 确定该系统的阻尼系数。
(10分)三、系统的信号流图如图所示,求输出C (S )的表达式。
自动控制原理试卷及答案20套
D.抛物线响应函数 答 ( )
3、(本小题 3 分) 如图所示是某系统的单位阶跃响应曲线,下面关于性能指标正确的是――
h (t )
1 .3
1.02
1
0
t
2
B.
4
C.
6
8
10
12
14
A.
t r 6s
t s 4s
t p 14s
D.
% 30%
答
( ) 4、(本小题 5 分)
W (s)
答案参见我的新浪博客:/s/blog_3fb788630100muda.html
第 7 页 共 42 页
QQ753326843
考研直通车
6.已知非线性控制系统的结构图如图 7-38 所示。为使系统不产生自振,是利用 描述函数法确定继电特性参数 a,b 的数值。 (15 分)
答案参见我的新浪博客:/s/blog_3fb788630100muda.html 第 1 页 共 42 页
QQ753326843
考研直通车
r _
e
2 0 1
u
1 s2
c
六、采样控制系统如图所示,已知 K 10, T 0.2s : 1.求出系统的开环脉冲传递函数。 1 2 2.当输入为 r (t ) 1(t ) t * 1(t ) 2 t * 1(t ) 时,求稳态误差 e ss 。
第 5 页 共 42 页
QQ753326843
3.当输入为
1 2 2
考研直通车
r (t ) 1(t ) t * 1(t ) t * 1(t ) 时,求稳态误差 e ss 。
R(s)
E (s)
1 e sT s
自动控制理论试题及答案

1.实际生产过程的控制系统大部分是 【 D 】 A.一阶系统 B.二阶系统 C.低阶系统 D.高阶系统 2.若开环传递函数G(s)H(s)不存在复数极点和零点,则 【 A 】 A. 没有出射角和入射角 B. 有出射角和入射角 C. 有出射角无入射角落 D. 无出射角有入射角 3.若开环传递函数为()1)(+=Ts s K s G , 此时相位裕量和K的关系是 【 B 】 A. 随K 增加而增大 B.随K 增大而减小C.以上都不是D.与K 值无关4.超前校正装置的最大超前相角 【 A 】A.11sin 1+--ββ B.11sin 1-+-ββ C.11cos 1+--ββ D.11cos1-+-ββ5.对于同一系统的状态变量和状态空间描述具有 【 C 】A. 状态变量具有唯一性,状态空间描述具有非唯一性B. 状态变量具有非唯一性,状态空间描述具有唯一性C. 状态变量具有非唯一性,状态空间描述也具有非唯一性D. 状态变量具有唯一性,状态空间描述也具有唯一性6.在工程问题中,常用______数学模型来表达实际的系统。
【 C 】A. 精确的 B. 复杂的 C. 简化的 D. 类似的7. 正弦输入函数r(t)的数学表达式是 【 C 】A.t t r ωsin )(=r B. )sin()(θω+=t t r C.)sin()(θω+=t A t r D.)cos()(θω+t A t r8.二阶振荡环节的对数幅频特性的高频段的渐近线斜率为_______dB/dec 。
【 C 】A.40B. -20C. -40D. 09.欲改善系统动性能,一般采用 【 A 】A.增加附加零点B. 增加附加极点B.同时增加附加零点,极点 D.A,B,C 均不行而用其它方法10.在各种校正方式中,______是最常见的一种,常加在系统中能量最小的地方。
【 B 】A.并联校正B.串联校正C.局部反馈校正D.前馈校正11.设系统的开环传递函数为,)5)(1(++S S S K 要使系统稳定,K 值的取值范围为 【 D 】A.K>0B. K<40C. 0<K<40D. 0<K<3012.一阶系统1)(+=Ts K s G G(s)的单位脉冲响应是y(t) = _______。
自动控制理论试卷及答案
1、一阶系统 G(s) = 1Ts + 1 在单位斜坡信号作用下,系统的稳态误差为 。
2、一个反馈系统的特征方程为 s 2 + 2Ks + 5 = 0,若要系统产生临界振荡, 则 K 的取值应为。
3、已知某校正装置的传递函数为 G c( T > 0 ),若要将此装置作为4、自动控制系统是由控制器和 组成。
5、梅逊公式主要用来 。
6、一阶系统 G(s)=的放大系数 K 愈小,则系统的输出响应的稳态值7、二阶欠阻尼系统的性能指标中只与阻尼比有关的是8、在用实验法求取系统的幅频特性时,一般是通过改变输入信号的 来求得输出信号的幅值。
A.相位B.频率C.稳定裕量D. 时间常数 9、直接对控制对象进行操作的元件称为 元件10、某典型环节的传递函数是 G (s ) =,则该环节是环节二、单项选择题(每题1.5分,共15分)。
得分| | 阅卷人| 1、开环控制系统的的特征是没有( )A.执行环节B.给定环节C.反馈环节D.放大环节2、主要用来产生偏差的元件称为()A. 比较元件B.给定元件C.反馈元件D.放大元件3、某系统的传递函数是 G(s) =e -Ts ,则该可看成由( )环节串联而成。
A. 比例、延时B.惯性、导前C.惯性、延时D.惯性、比例 4、已知 F (s) =,其原函数的终值 t f()wt ) = ( )A.0B. ∞C.0.75D.3 5、在信号流图中,在支路上标明的是( )A.输入B. 引出点C. 比较点D.传递函数 6、设一阶系统的传递函数是 G(s) =,且容许误差为 2%,则其调整时间为( )A.1B.1.5C.2D.3 7 、 惯性环节和积分环节的频率特性在( )上相等。
A. 幅频特性的斜率B.最小幅值C.相位变化率D.穿越频率 8、若保持二阶系统的 ζ 不变,提高 ωn ,则可以( )A.提高上升时间和峰值时间B.减少上升时间和峰值时间C.提高上升时间和调整时间D.减少上升时间和超调量9、二阶欠阻尼系统的有阻尼固有频率 ωd 、无阻尼固有频率 ωn 和谐振频率 ωr 比较( ) A. ωr >ωd >ωn B.ωr >ωn >ωd C.ωn >ωr >ωd D.ωn >ωd >ωr 10、根据系统的特征方程 D(s) = 3s 3 + s 2 - 3s + 5 = 0 ,可以判断系统为( )A.稳定B.不稳定C.临界稳定D.稳定性不确定三、判断题(每题 1.5 分,共 15 分)。
《自动控制理论》试题及参考答案
《自动控制理论》参考资料一、单选(本大题共60小题,每小题1分,共60分)在每小题列出的备选项中只有一个符合题目要求的,请将其选出并将“答题卡”的相应代码涂黑,错涂、多涂或未涂均无分1.关于传递函数,错误的说法是(B)。
A.传递函数只适用于线性定常系统;B.传递函数不仅取决于系统的结构参数,给定输入和扰动对传递函数也有影响;C.传递函数一般是为复变量s的真分式;D.闭环传递函数的极点决定了系统的稳定性。
2.关于线性系统稳态误差,正确的说法是:(C)A.一型系统在跟踪斜坡输入信号时无误差B.增大系统开环增益K可以减小稳态误差C.增加积分环节可以消除稳态误差,而且不会影响系统稳定性D.减小系统开环增益K可以减小稳态误差3.在各种校正方式中,______是最常见的一种,常加在系统中能量最小的地方。
(B )A.并联校正B.串联校正C.局部反馈校正D.前馈校正4.适合应用传递函数描述的系统是(A )A.单输入,单输出的线性定常系统B.单输入,单输出的线性时变系统C.单输入,单输出的定常系统D.非线性系统5.欲改善系统动性能,一般采用(A )。
A.增加附加零点B.增加附加极点C.同时增加附加零点,极点D.A,B,C均不行而用其它方法6.若某负反馈控制系统的开环传递函数为5/[s(s+5)] ,则该系统的闭环特征方程为(B)A.s(s+1)=0B.s(s+1)+5=0C.s(s+1)+1=0D.与是否为单位反馈系统有关7.已知串联校正装置的传递函数为0.2(s+5)/(s+10),则它是(C)A.相位迟后校正B.迟后超前校正C.相位超前校正D.A、B、C都不是8.与开环控制系统相比较,闭环控制系统通常对(B)进行直接或间接的测量,通过反馈环节去影响控制信号。
A.输入量B.输出量C.扰动量D.设定量9..单位反馈系统的开环传递函数G(s)=16/(s(s+4*sqrt(2))),其幅值裕度h等于(D)A.0B.4sqrt(2)DbC.16dBD.无穷10.非单位负反馈系统,其前向通道传递函数为G(S),反馈通道传递函数为H(S),当输入信号为R(S),则从输入端定义的误差E(S)为(D)A.E(s)=R(S)G(S)B.E(S)=R(S)G(S)H(S)C.E(S)=R(S)G(S)-H(S)D.E(S)=R(S)-G(S)H(S)11.若系统增加合适的开环零点,则下列说法不正确的是(B)。
自动控制原理习题与答案解析
1、绘制该系统以根轨迹增益Kr为变量的根轨迹(求出:分离点、与虚轴的交点等);(8分)
2、求系统稳定且为欠阻尼状态时开环增益K的取值范围。(7分)
六、(共22分)已知反馈系统的开环传递函数为 ,试:
1、用奈奎斯特判据判断系统的稳定性;(10分)
4、 ; ; ;衰减振荡
5、 ;
6、开环极点;开环零点
7、
8、 ; ;稳态性能
二、判断选择题(每题2分,共 20分)
1、D 2、A 3、C 4、A 5、D 6、A 7、B 8、C 9、B 10、B
三、(8分)建立电路的动态微分方程,并求传递函数。
解:1、建立电路的动态微分方程
根据KCL有 (2分)
即 (2分)
3、在经典控制理论中,可采用、根轨迹法或等方法判断线性控制系统稳定性。
4、控制系统的数学模型,取决于系统和, 与外作用及初始条件无关。
依题意: , (3分)
得 (2分)
故满足稳态误差要求的开环传递函数为
3、满足稳态误差要求系统的相角裕度 :
令幅频特性: ,得 , (2分)
, (1分)
相角裕度 : (2分)
试题三
一、填空题(每空 1 分,共Байду номын сангаас0分)
1、对自动控制系统的基本要求可以概括为三个方面,即:、快速性和。
2、控制系统的称为传递函数。一阶系统传函标准形式是,二阶系统传函标准形式是。
开环相频特性: (1分)
3、求系统的相角裕度 :
求幅值穿越频率,令 得 (3分)
(2分)
(2分)
对最小相位系统 临界稳定
4、(4分)可以采用以下措施提高系统的稳定裕度:增加串联超前校正装置;增加串联滞后校正装置;增加串联滞后-超前校正装置;增加开环零点;增加PI或PD或PID控制器;在积分环节外加单位负反馈。
自动控制理论课后题答案及试题

自动控制理论课后题答案及试题一、填空题1. 自动控制系统的被控对象是指系统的____________,它是系统进行控制的对象。
答案:输入输出对象2. 开环控制系统是指系统的输出____________系统的输入。
答案:不直接3. 闭环控制系统又称为________控制系统。
答案:反馈4. 系统的稳定性是指系统在受到____________后,能否迅速恢复到原来的稳定状态。
答案:干扰5. 系统的稳态是指系统在长时间运行后,其____________和____________趋于稳定。
答案:输出,输入6. 系统的动态性能是指系统在受到____________时,系统输出信号的变化情况。
答案:输入7. 系统的性能指标主要包括:稳态性能、动态性能和____________性能。
答案:鲁棒性8. 常用的数学工具主要有:微分方程、____________和____________。
答案:差分方程,传递函数9. 拉普拉斯变换是一种________变换,它将时域信号变换为________域信号。
答案:线性,复10. 控制系统的性能可以通过____________、____________和____________等指标来衡量。
答案:稳态误差,上升时间,调整时间二、选择题1. 下列哪种系统是闭环控制系统?()A. 开环控制系统B. 闭环控制系统C. 半开环控制系统D. 半闭环控制系统答案:B2. 下列哪种方法可以提高系统的稳定性?()A. 增加系统的开环增益B. 减小系统的反馈增益C. 增加系统的相位裕度D. 减小系统的截止频率答案:C3. 下列哪种情况会导致系统产生稳态误差?()A. 系统的输入为常数B. 系统的输入为正弦信号C. 系统的反馈环节存在纯滞后D. 系统的开环增益为无穷大答案:C三、简答题1. 请简述自动控制系统的稳定性、动态性能和稳态性能的概念及它们之间的关系。
答案:稳定性是指系统在受到干扰后,能否迅速恢复到原来的稳定状态;动态性能是指系统在受到输入信号时,系统输出信号的变化情况;稳态性能是指系统在长时间运行后,其输出和输入趋于稳定。
[西北工业大学]自动控制理论(202104)
![[西北工业大学]自动控制理论(202104)](https://img.taocdn.com/s3/m/e91fb7eb79563c1ec4da7180.png)
C.抗高频干扰能力 D.以上都不是 答案:B
15.I型单位反馈系统的闭环增益为()。 A.与开环增益有关 B.与传递函数的形式有关 C.1 D.与各环节的时间常数有关 答案:A
16.积分环节的频率特性相位移为()。 A.-90° B.90° C.180° D.-180° 答案:A
4.下列判别系统稳定性的方法中,()是在频率里的判据。 A.劳斯判据 B.根轨迹法 C.奈式判据 D.以上都不是 答案:C
5.若要改善系统的动态性能,可以增加()。 A.积分环节 B.振荡环节 C.惯性环节 D.微分环节 答案:D
6.劳斯阵列表中某一行的参数全为零,或只有等于零的一项,则说明在根平面内存在共轭虚根或共 轭复根对称于()。 A.实轴 B.虚轴 C.原点 D.以上全不是 答案:B
35.{ A.{ B.{
C.{ D.{ 答案:B
36.闭环系统的动态性能主要取决于开环对数幅频特性的()。 A.低频段 B.开环增益 C.高频段 D.中频段 答案:D
37.闭环零点影响系统的()。 A.稳定性 B.稳态误差 C.调节时间 D.超调量 答案:D
38. A.{ B.{ C.{ D.{ 答案:D
45. A.输入为0 B.输入、输出以及它们的各阶导数为0 C.输入、输出为0 D.输出及各阶导数为0 答案:B
46.下列哪种措施对提高系统的稳定性没有效果()。 A.增加开环极点 B.在积分环节外加单位负反馈 C.增加开环零点 D.引是()。 A.{ B.{ C.{ D .{ 答案:A
25.惯性环节和积分环节的频率特性在()上相等。 A.幅频特性的频率 B.最小幅值 C.相位变化率 D.穿越频率 答案:A
《自动控制系统》试卷B附答案

专业班级学号姓名《自动控制系统》试卷B答题纸1. 2. 3.4. 5. . 6. 7二、单项选择题(每题1分,共10 分)1. 2. 3. 4. 5. 6. 7. 8. 9. 10.三、问答题(30分)1.分析比较开环控制和闭环控制的特征,优缺点和和应用场合的不同。
2.系统的稳定性定义是什么?误差和稳态误差的定义是什么?3.时间瞬态响应的性能指标有哪些?它们反映系统哪些方面的性能?四、计算题(50分)1. 系统结构图如下,请化简结构图,求传递函数。
(10分)2.已知线性系统的闭环特征方程为:4s+3s+32s+3s+2=0请用劳斯判据判断系统的稳定性。
(10分)3.已知单位负反馈系统的开环传递函数为:G(s)=Ks(0.5s2+4s+10)求使系统稳定的开环放大系数K的取值范围。
(10分)4.下图是电炉箱的控制系统图。
画出它的原理框图,并说明它的工作原理。
(10分)5.已知R(s)=1/s。
求Kn=1和0.1时系统的稳态误差。
(10分)《自动控制系统》试卷B一、 填空题(每空1 分,共10 分)1. 积分环节的传递函数为 ,惯性环节的传递函数为 。
2. 串联方框图的等效传递函数等于各串联传递函数之3. 单位斜坡信号的拉氏变换式 ,单位抛物线信号的拉氏变换是 。
4. 系统开环传递函数中有两个积分环节则该系统为 型系统。
5. 比例环节的频率特性为 。
6. 在零初始条件下输出量与输入量的拉氏变换之比,称该系统的传递函数。
7. 按信号传递的连续性分类,控制系统可分为两类: , 。
二、单项选择题(每题1分,共10 分)1. 传递函数反映了系统的动态性能,它与下列哪项因素有关?( )。
A.输入信号 B.初始条件 C.系统的结构参数 D.输入信号与初始条件2. 设系统的传递函数为15251)(2++=s s s G ,则系统的阻尼比为( )。
A.0.5 B. 1C.0.2D. 1.23. 典型二阶系统的阻尼比ξ=0时,其单位阶跃响应是( )。
自动控制原理考试题库及参考答案
课程管理第1题:开环控制方式是按()进行控制的,反馈控制方式是按()进行控制的。
A. 偏差;给定量B. 给定量;偏差C. 给定量;扰动D. 扰动;给定量第2题:自动控制系统的是系统正常工作的先决条件。
A. 稳定性B. 动态特性C. 稳态特性D. 精确度第3题:系统的微分方程为c(t)=r(t)coswt+5 , 则系统属于()。
A. 离散系统B. 线性定常系统C. 线性时变系统D. 非线性系统第4题:时域中常用的数学模型不包括。
A. 微分方程B. 差分方程C. 传递函数D. 状态方程第5题:适合于应用传递函数描述的系统是。
A. 线性定常系统B. 线性时变系统C. 非线性时变系统D. 非线性定常系统第6题:传递函数的零初始条件是指tA. 输入为零B. 输入、输出及各阶导数为零C. 输入、输出为零D. 输出及各阶导数为零第7题:传递函数的拉氏反变换是()。
A. 单位阶跃响应B. 单位加速度响应C. 单位斜坡响应D. 单位脉冲响应第8题:系统自由运动的模态由()决定。
A. 零点B. 极点C. 零点和极点D. 增益第9题:信号流图中,()的支路称为源节点。
A. 只有信号输入B. 只有信号输出C. 既有信号输入又有信号输出D. 任意第10题:信号流图中,()的支路称为阱节点。
A. 只有信号输入B. 只有信号输出C. 既有信号输入又有信号输出D. 任意第11题:信号流图中,()的支路称为混合节点。
A. 只有信号输入B. 只有信号输出C. 既有信号输入又有信号输出D. 任意第12题:分析系统的动态性能时常用的典型输入信号是()。
A. 单位阶跃函数B. 单位速度函数C. 单位脉冲函数D. 正弦函数第13题:一阶系统的单位阶跃响应曲线的输出值为 0.632 时对应的 t=()。
A. TB. 2TC. 3TD. 4T第14题:一阶系统的单位阶跃响应曲线的输出值为 0.95 时对应的t=()。
A. TB. 2TC. 3TD. 4T第15题:一阶系统的单位阶跃响应曲线的输出值为 0.982 时对应的t=()。
自动控制理论_习题集(含答案)
A. 对称于实轴B. 对称于虚轴C. 位于左半[s]平面D. 位于右半[s]平面 13. 系统的开环传递函数)4)(2()3)(1()(*0++++=s s s s s K s G ,则全根轨迹的分支数是( C )。
A .1B .2C .3D .414. 已知控制系统的闭环传递函数是)()(1)()(s H s G s G s G c +=,则其根轨迹起始于( A )。
A . G(s)H(s)的极点 B . G(s)H(s)的零点 C . 1+ G(s)H(s)的极点D . 1+ G(s)H(s)的零点15. 系统的闭环传递函数是)()(1)()(s H s G s G s G c +=,根轨迹终止于( B )。
A . G(s)H(s)的极点B . G(s)H(s)的零点C . 1+ G(s)H(s)的极点D . 1+ G(s)H(s)的零点线16. 在设计系统时应使系统幅频特性L(ω)穿越0dB 线的斜率为( A )。
A .-20dB/decB .-40dB/decC .-60dB/decD .-80dB/dec17. 当ω 从−∞ → +∞ 变化时惯性环节的极坐标图为一个( B )。
A .位于第一象限的半圆B .位于第四象限的半圆C .整圆D .不规则曲线18. 设系统的开环幅相频率特性下图所示(P 为开环传递函数右半s平面的极点数),其中闭环系统稳定的是( A )。
A. 图(a)B. 图(b)C. 图(c)D. 图(d)19. 已知开环系统传递函数为)1(10)()(+=s s s H s G ,则系统的相角裕度为( C )。
A .10°B .30°C .45°D .60°20. 某最小相位系统的开环对数幅频特性曲线如下图所示。
则该系统的开环传递函数为( D )。
20-20 ωL(dB) 10(a) p=1 (b) p=1 (c) p=1 (d) p=1由图知存在自振。
自动控制理论试卷答案
自动控制理论试卷B 答案一、填空题(每空 1 分,共20分)1、在水箱水温控制系统中,受控对象为 水箱 ,被控量为 水温 。
2、自动控制系统有两种基本控制方式,当控制装置与受控对象之间只有顺向作用而无反向联系时,称为 开环控制系统 ;当控制装置与受控对象之间不但有顺向作用而且还有反向联系时,称为 闭环控制系统 ;含有测速发电机的电动机速度控制系统,属于 闭环控制系统 。
3、稳定是对控制系统最基本的要求,若一个控制系统的响应曲线为衰减振荡,则该系统 稳定 。
4、传递函数是指在 零 初始条件下、线性定常控制系统的 输出的拉氏变换 与 输入拉氏变换 之比。
5、控制系统的数学模型,取决于系统 结构 和 参数 , 与外作用及初始条件无关。
6、在二阶系统的单位阶跃响应图中,s t 定义为 调节时间 。
%σ是 超调量 。
7、对于自动控制系统的性能要求可以概括为三个方面,即: 稳定性 、 快速性 、和 准确性 ,其中最基本的要求是 稳定性 。
8、若某单位负反馈控制系统的前向传递函数为()G s ,则该系统的开环传递函数为 ()G s 。
9、能表达控制系统各变量之间关系的数学表达式或表示方法,叫系统的数学模型,在古典控制理论中系统数学模型有 微分方程 、 传递函数 等。
二、选择题(每题 2 分,共10分)1、关于传递函数,错误的说法是 ( B ) A 传递函数只适用于线性定常系统;B 传递函数不仅取决于系统的结构参数,给定输入和扰动对传递函数也有影响;C 传递函数一般是为复变量s 的真分式;D 闭环传递函数的极点决定了系统的稳定性。
2、已知单位负反馈系统的开环传递函数为221()6100s G s s s +=++,则该系统的闭环特征方程为 ( B )。
A 、261000s s ++=B 、 2(6100)(21)0s s s ++++=C 、2610010s s +++=D 、与是否为单位反馈系统有关3、已知系统的开环传递函数为50(21)(5)s s ++,则该系统的开环增益为 ( C )。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
自动控制理论试卷B 答案
一、填空题(每空 1 分,共20分)
1、在水箱水温控制系统中,受控对象为 水箱 ,被控量为 水温 。
2、自动控制系统有两种基本控制方式,当控制装置与受控对象之间只有顺向作用而无反向联系时,称为 开环控制系统 ;当控制装置与受控对象之间不但有顺向作用而且还有反向联系时,称为 闭环控制系统 ;含有测速发电机的电动机速度控制系统,属于 闭环控制系统 。
3、稳定是对控制系统最基本的要求,若一个控制系统的响应曲线为衰减振荡,则该系统 稳定 。
4、传递函数是指在 零 初始条件下、线性定常控制系统的 输出的拉氏变换 与 输入拉氏变换 之比。
5、控制系统的数学模型,取决于系统 结构 和 参数 , 与外作用及初始条件无关。
6、在二阶系统的单位阶跃响应图中,s t 定义为 调节时间 。
%σ是 超调量 。
7、对于自动控制系统的性能要求可以概括为三个方面,即: 稳定性 、 快速性 、和 准确性 ,其中最基本的要求是 稳定性 。
8、若某单位负反馈控制系统的前向传递函数为()G s ,则该系统的开环传递函数为 ()G s 。
~
9、能表达控制系统各变量之间关系的数学表达式或表示方法,叫系统的数学模型,在古典控制理论中系统数学模型有 微分方程 、 传递函数 等。
二、选择题(每题 2 分,共10分)
1、关于传递函数,错误的说法是 ( B )
A 传递函数只适用于线性定常系统;
B 传递函数不仅取决于系统的结构参数,给定输入和扰动对传递函数也有影响;
C 传递函数一般是为复变量s 的真分式;
D 闭环传递函数的极点决定了系统的稳定性。
2、已知单位负反馈系统的开环传递函数为221
()6100
s G s s s +=++,则该系统的闭环
特征方程为 ( B )。
A 、261000s s ++=
B 、 2(6100)(21)0s s s ++++=
、
C 、2610010s s +++=
D 、与是否为单位反馈系统有关
3、已知系统的开环传递函数为
50
(21)(5)
s s ++,则该系统的开环增益为 ( C )。
A 、 50
B 、25
C 、10
D 、5
4、二阶系统的性能指标中表示超调量的参数为( A ) 。
A 、%σ B 、r t C 、s t D 、p t
5、下列系统中属于不稳定的系统是( D )。
A 、闭环极点为1,212s j =-±的系统
B 、闭环特征方程为2210s s ++=的系统
C 、阶跃响应为0.4()20(1)t c t e -=+的系统
D 、脉冲响应为0.4()8t h t e =的系统
三、试建立如图所示机械位移系统的动态微分方程,并求传递函数,其中位移i x 为输入,位移o x 为输出。
(15分) $
解:的引出点作为辅助点,根据力的平衡原则,可列出如下原始方程:
移项整理得系统微分方程:
对上式进行拉氏变换,并注意到运动由静止开始,即:
则系统传递函数为:
四、对下面系统结构图进行化简,求出其传递函数。
(共15分)
!
解:
所以:
|
五、已知某单位反馈系统的开环传递函数为1
()(1)K G s s s =+,试求
系统的动态性能指标r t 、s t p t %σ。
(共20分)
解:系统的闭环传递函数为:
2
22
2()1
()1()12n K B K n n
G s G s G s s s s s ωξωω===+++++
可得:21n
ω=,21n ξω=
所以:
2
2.51r n t s ωξ
=
=- ,cos 1.047θξ==
10.5
n ωξ==
3
(5%)6s n
t
s ξω=
=
2
3.61p n t s πωξ
=
=-
2
1%100%16.4%e
ξπξσ-
-=⨯=
(
六、若某系统在单位阶跃输入r(t)=1(t)时,零初始条件下的输出响应
,试求系统的传递函数和脉冲响应。
(共20分)
解:对输出响应取拉氏变换的:
因为:
所以系统的传递函数为:
2
42
()(1)(2)s s G s s s ++=
++
所以系统的单位脉冲响应为:
1()()()()
C s G s R s G s s
==。