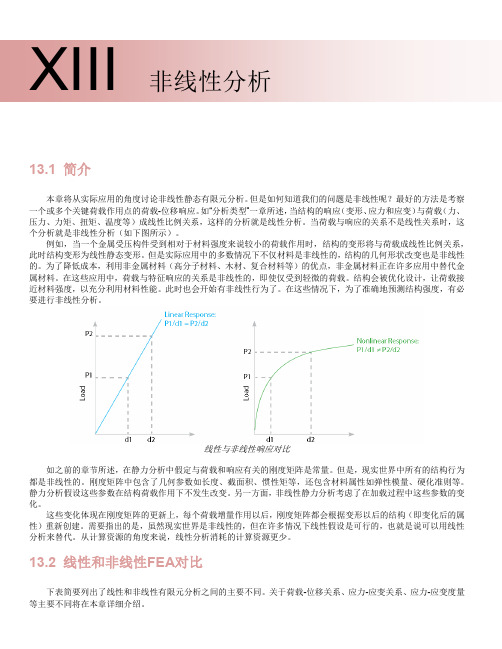
非线性有限元作业_老骆整理
有限元非线性分析
2)对数应变和真实应力 对数应变/自然应变/真实应变是度量大应变的方法,计算公式如下:
它是非线性应变的度量,因此是关于最终长度的非线性函数。与线性应变相比,对数应变(或真实应变)是可加
的。考虑一个初始长度为1m的杆经过下面3步的变形: 第1步: 从1m 变形至1.2m 第2步:从1.2m 变形至1.5m 第3步:从1.5m变形至2m 在下表中我们比较了工程应变和真实应变。可以清楚地看到,只有真实应变是可加的,因此在非线性分析中应该
大位移和大转角(小应变;线性或非线性材料)
大位移、大转角和大应变(线性或非线性材料)
K.J. Bathe, Finite Elemente Methoden 在线性FEA中,应变,如x方向应变可写为εx = ∂u/∂x,也就是说在表达式εx = ∂u/∂x + ...[(∂u/∂x)z + (∂v/∂x)z + (∂w/∂x)z]中只考虑了一次项的影响。在大位移(非线性)中,表达式的二次项也要考虑。另外,材料的应力-应变关 系也不一定是线性的。 2)材料非线性
材料非线性的特点
非线性材料(小位移)
K.J. Bathe, Finite Elemente Methoden 所有的工程材料本质上都是非线性的,因为无法找到单一的本构关系满足不同的条件比如加载、温度和应变率。 可以对材料特性进行简化,只考虑对分析来说重要的相关因素。线弹性材料(胡克定律)假设是最简单的一种。如果 变形可恢复,则材料为线弹性,如果变形不可恢复,则为塑性。如果温度效应对材料属性影响较大,则应该通过热弹性或热-塑性关系考虑结构和热之间的耦合效应。如果应变率对材料有明显影响,则应使用粘-弹性或粘-塑性理论。 上图是一个材料非线性的示例。 材料非线性的简单分类: 1. 非线性弹性 2. 超弹性 3. 理想弹-塑性 4. 弹性-时间无关塑性 5. 时间相关塑性(蠕变) 6. 应变率相关弹-塑性 7. 温度相关的弹性和塑性 如果考察上图中的应力-应变曲线,则材料非线性可以分为以下几类: 1. 线弹性-理想塑性 2. 线弹性-塑性。应力-应变曲线的塑性段与时间无关,还可细分为两种:
非线性有限元法综述
非线性有限元法综述摘要:本文针对非线性有限元法进行综述,分别从UL列式及TL列式、CR列式、几何精确梁、壳理论三个方面介绍其分析思路和发展动态,旨在为相关学者提供一些思路参考。
关键词:几何非线性;UL列式;TL列式;CR列式;几何精确梁、壳理论1引言几何非线性是由于位置改变引起了结构非线性响应。
进行结构几何非线性分析,实质上就是要得到结构真实的变形与受力情况。
有限元方法是进行结构几何非线性分析的最成熟的方法,也是应用最广泛的分析方法.2非线性有限元法研究思路非线性有限元法主要指UL列式法、TL列式法、CR列式法和几何精确梁、壳理论等,它们有着基本相同的思路,即利用虚功原理建立平衡方程。
方程中充分考虑了非线性因素对结构应变和应力的影响,也就是将线性应变和非线性应变都代入到表达式中,然后确定单元的本构关系并选取合适的形函数,导出单元对应的弹性刚度矩阵和几何刚度矩阵,再选取合适的增量-迭代算法进行求解,由此就完成了结构的整个几何非线性分析求解过程。
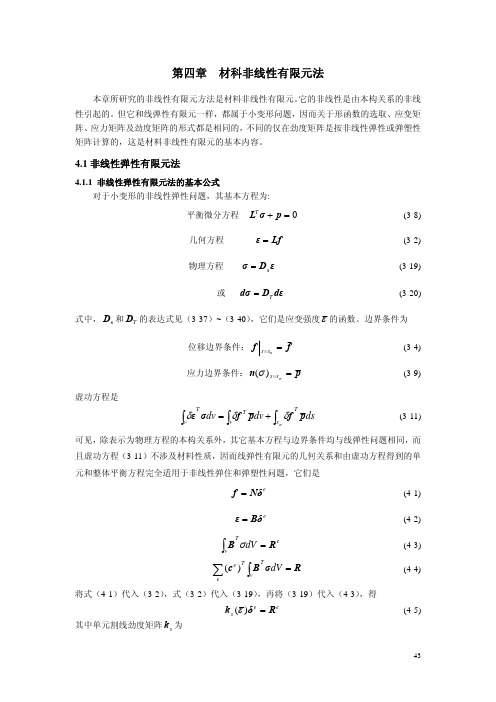
非线性有限元法将结构的变形过程划分为三个主要阶段:C0状态、C1状态和C2状态,如图1所示。
图1 单元的变形C0状态是单元的初始状态,C1状态是单元受力变形后上一次处于平衡的状态;C2状态是单元的当前状态,也就是所求的状态。
2.1UL法和TL法研究思路UL法和TL法为几何非线性问题提供了新的分析思路。
这两种方法本质上没有很大区别,但是方程建立的参考状态有所不同。
完全拉格朗日法(TL法)是以结构变形前C0状态为参考建立平衡方程的,考虑结构从C0状态到C2状态之间的变形;而更新的拉格朗日法(UL法)以结构变形后C1状态为参考建立平衡方程的[2],考虑结构从C1状态到C2状态之间的变形。
两种拉格朗日法的主要形式如下:(1)TL列式(2)UL列式从上面两式可以看出:TL法和UL法的另一个不同是TL法的增量平衡方程中考虑了初位移矩阵的影响,而UL法则忽略了其影响,只考虑了弹性刚度矩阵和初应力矩阵的影响。
非线性有限元作业_老骆整理资料
1.轴对称问题的弹塑性分析解析解。
厚壁筒受内压,采用Mises屈服准则σθ−σγ=√3s(1) 经计算知,当t=12.5(12.91)时,材料处于弹塑性交界面。
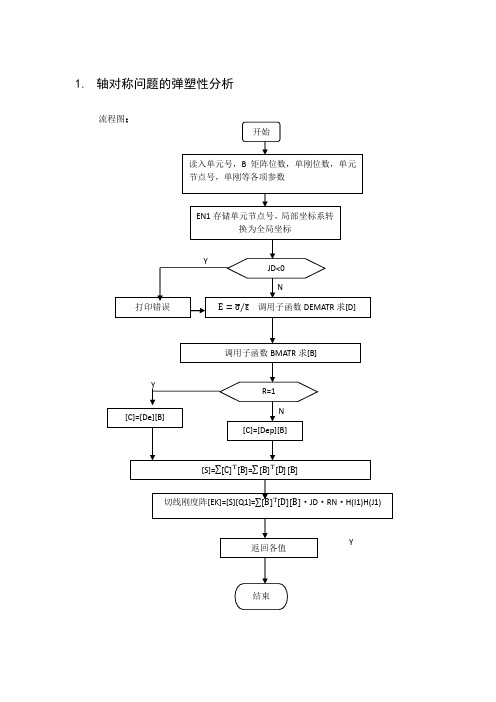
弹性区为:t≤r≤bσr=2s√3b2(b2r2−1)(2)σθ=2s3b2(b2r2+1)(3)塑性区:a≤r≤tσr=3s ln ra−P(4)σθ=3s (1+ln ra)−P(5)交界处有:r=t,σr e=σr pP=s√3−t2b2+2ln ta)(6)最后解得残余应力为:σr r=√3s ln ra−b2Pb2−a2(1−a2r2),a≤r≤t(7a)σr r=(s2√3b2−a2Pb2−a2)(1−a2r2),t≤r≤b(7b)σθr=3s (1+ln ra)−b2Pb2−a2(1+a2r2),a≤r≤t(8a)σθr=(s2√3b2−a2Pb2−a2)(1+a2r2),a≤r≤t(8b)有限元网格信息图:图1 有限元网格输入数据文件内容(详细信息见附件): DATA(1)NNODE MELEM IFU IFW IPF IPR NPP NRM HAC MSF NULOAD EXP NM(1-MELEM) NN NN(1-NNODE) R Z NFU(1-IFU) FU NFW(1-IFW) FWMPQ(1-IPF) NPQ*PQ NPRNRZ(1-IPR) PRNRZE EMU SSS HH UNLOAD对理想塑性材料厚壁筒,从初始状态开始,历经加载后完全卸载。
这一过程中,厚壁筒内会产生残余应力。
沿径向R 的残余应力如图2-3所示。
-1.6-1.4-1.2-1-0.8-0.6-0.4-0.2101214161820R a d i a l s t r e s sRadius R图2 径向残余应力-半径曲线-15-10-5101214161820T a n g e n t i a l s t r e s sRadius R图3 切向残余应力-半径曲线图2-3中分别给出了径向残余应力和切向残余应力随半径的变化,并且和解析解进行了比较。
非线性有限元——lesson6 2018-10-24
《弹塑性力学与有限元》
屈服总则和弹塑性应力-应变关系
q 屈服总则定义
物体内某一点开始产生塑性应变时,应力或应变所必需满足的条件, 叫做屈服条件。屈服条件是判断材料处于弹性还是塑性的准则。
Ø
单向拉压应力状态的屈服条件 s :屈服应力
s
Ø
f () - s 0
(6.1)
复杂应力状态的屈服函数
a E b
n
其中,a,b,n为材料常数,有三个参数,能较好地代表真实材料, 数学表达式简单。
《弹塑性力学与有限元》
单轴状态下材料的特征和模型
q 单轴状态下的全量和增量应力-应变模型 n Ø Ramberg-Osgood模型 (三参数模型) a
q 单轴应力-应变
(MPa)
C(s上) (e) B 200 D(s下) A(p) E=tg O Ey= tg O1 O2 0.1
低碳钢压缩 应力应变曲线
特性
Ø 单调加载
400
E ( b ) f1(f)
低碳钢拉伸 应力应变曲线
g
0.2
《弹塑性力学与有限元》
单轴状态下材料的特征和模型
q 单轴状态下的增量应力-应变模型
3)物理条件 Ø 对于Ramberg-Osgood模型 ,荷载位移关系为: 物理条件为:
n a E b
《弹塑性力学与有限元》
单轴状态下材料的特征和模型
q
作业:
1)请完成教材第163页的习题:4.2;4.3. 2)对自己可能的研究方向中存在哪些弹塑性力学的问题和应用进 行调研,并对该问题和应用从问题的提出、解决问题的理论、求 解方法和结果进行简要论述,写成Word文件提交(4周内完成)。 3)仔细复算第177-179页的算例.
非线性有限元方法

非线性有限元方法非线性有限元方法是大量应用于工程领域的计算方法,它主要用于求解复杂结构的力学问题,例如材料的变形、破坏和变形控制等。
与线性有限元方法不同,非线性有限元方法考虑因为载荷和边界条件的非线性导致问题的非线性本质,以及材料的非线性行为。
在这篇文章中,我们将讨论非线性有限元方法,包括其应用、工作原理以及其在工程领域中的重要性等内容。
首先,我们来研究一下非线性有限元方法的应用。
非线性有限元方法在许多方面都有应用。
其中最重要的领域是结构力学,包括建筑、航空航天、汽车等领域。
由于这些结构需要承受复杂的载荷,因此非线性有限元方法可以很好地模拟这些结构的行为,预测它们的性能和寿命。
此外,非线性有限元方法还可以应用于材料力学研究中,例如破碎、断裂和塑性变形等方面。
其次,我们来了解一下非线性有限元方法的工作原理。
与线性有限元方法类似,非线性有限元方法通过将结构分成小块进行离散,然后在每个小块中进行力学分析,最后将分析结果合并为整个结构的行为。
但是,与线性有限元方法不同的是,非线性有限元方法考虑到材料的非线性行为,采用迭代的方法计算结构的响应。
通常,在每一次迭代中,我们都将结构的当前状态作为一个初始猜测,然后求解出该状态下的切应力和位移场。
然后我们将这个位移场的结果代入底部,从而更新结构的状态。
如果解决方案收敛,则完成计算,否则就将新的状态再次代入求解。
这种方法的本质是将非线性问题转化为一系列线性问题的求解,通过迭代求解来逼近非线性问题的解。
最后,我们来讨论一下非线性有限元方法在工程领域中的重要性。
非线性有限元方法已成为现代工程设计和分析的不可或缺的工具。
它允许工程师们模拟和预测各种工程机构的行为,以及设计和优化各种结构。
例如,它可以帮助我们了解在不同载荷下建筑和桥梁行为的变化,预测材料的破坏和失效,以及优化汽车和飞机的结构以提高其性能。
总之,非线性有限元方法是一种复杂但十分有用的计算方法,它可以模拟各种结构的行为并预测其性能和寿命。
如何利用非线性有限元法进行力学分析

如何利用非线性有限元法进行力学分析非线性有限元法是一种用于数值分析问题的计算方法,其主要应用于力学分析领域。
这种方法在于其对于复杂结构的建模能力和高精度数值计算能力而备受推崇。
在本文中,将介绍如何对力学问题进行分析,以及如何应用非线性有限元法对力学分析进行模拟。
1. 引言力学分析整体上分为两种类型:静力学分析和动力学分析。
静力学分析研究对于物体的力和静止条件进行研究,其中力一般会造成物体的运动。
而动力学分析则研究运动物体的变化,特别是再一定条件下物体的振动问题等。
因为力学分析问题具有很高的复杂性,很多时候需要使用非线性有限元法来得到更准确的结果。
下面我们将详细介绍使用非线性有限元法进行力学分析的方法和流程。
2. 有限元法简介有限元法是一种现代数值计算方法,它将大工程结构分割为小的有限元。
在每个有限元内,结构的物理性质可以被认为是常量。
(具体内容可以自己百度)3. 如何利用非线性有限元法进行力学分析使用非线性有限元法进行力学分析的核心是将宏观问题转变为微观问题来进行模拟计算。
其中需要注意下面几点:3.1 确定力学分析的类型根据要进行分析的结构本身的性质和应用场景,可能涉及到静力学分析或者动力学分析。
其中静力学分析的计算主要涉及到结构在平衡状态下的情况,而动力学分析主要涉及到结构在某种条件下的运动和振动情况。
因此,在进行力学分析之前需要确定其类型,以便进行后续的计算。
3.2 建立结构模型根据具体情况,需要对结构进行建模。
建模可以通过一定的工具软件实现,或者手工建立结构模型。
模型的建立需要考虑到其复杂性和具体的应用场景。
构建好结构模型之后,需要对其进行精细化剖分得到单元网格,并进行编号。
3.3 确定边界条件在进行力学分析时,还需要考虑结构的边界条件。
边界条件可以通过指定某些点的坐标或者某些角度的变化来确定。
因此,在进行计算时需要根据具体情况设定边界条件,以便进行后续的计算。
3.4 进行数值模拟计算运用有限元法的基本原理,将每个单元的机械性质进行计算,根据力学分析的情况,可以得到结构节点的位移、应变和应力等参数。
非线性有限元 第4章材科非线性有限元法
内为零时终止。假定最后一次迭代 i=I,则该级荷载增贵的最终位移为
I
δm δm1 δmi i0
按(2-46)求出位移增量 δmi 后,应力增量为
σ
i m
DT
(ε
i m
)
Bc
e
δmi
(4-14)
(4-15)
第 m 级荷载增量的最终应力为
I
σ m σm1
σ
i m
真实的本构关系求出最后的应力结果。在迭代过程中,σ
i m
和
(σ
e
)
i m
分别是由
δmi
按真实本构
关系和"线弹性"计算出来的应力。
(
R
0
)
i m
在迭代过程中并不趋于零,而是趋于一常数矢量
(图
4-3(b)中的
M),它是与收敛解的真实应力
M m
m
和弹性应力
(
e
)
M m
之差相应的
等效结点力。(
(4-9)
KT
( δ)
ψ δ
e
(c e )T
BT
v
dσ dε
dε dδ
dV
4.1.2 求解的选代过程
(c e )T
(
BT
v
DT
BdV )c e
e
(4-10)
不同的非线性方程组求解方法,迭代过程中的一些具体处理方法也不相同,但对荷载的
处理一般都分级按增量方法计算。
1. 荷载分级
初应力。从图 4-3 可以看出, e D 为弹性应力,σ0 是由于应 力应变非线性而降低的应力( σ0 为负值)。初应力法就是将初应 力 σ0 看作是变化的,以此来反映应力和应变之间的非线性关系。
非线性有限元之非线性求解方法

非线性有限元之非线性求解方法平衡回顾✧静态平衡是内力I和外载P力量平衡;✧在非线性问题中,模型的内力I可以是以下量的非线性函数;✧在非线性问题中,模型的外力P也可以是某些量的非线性函数,如位移u和时间t。
非线性求解方法1.已知一个分析,知道结构总载荷和初始刚度,目的是找到最后的位移。
线性分析中,一次计算就能求解出最终位移;非线性问题中不可能,因为结构刚度随着结构变形而改变。
2.求解这类非线性问题需要的是一种增量\迭代技术,获得的解是非线性问题准确的近似。
这些方程通常没有精确解。
3.Abaqus使用迭代求解该方程:使用牛顿拉普森方法求解近似解,使误差最小。
4.Abaqus用法:1)载荷历史被拆解为一系列的分析步;每个分析步拆解为一系列增量步;用户为初始时间增量猜测一个值;Abaqus使用自动增量算法确定其他的增量步。
在每个增量步结束时,Abaqus根据载荷与时间关系计算当前负载大小2)使用牛顿拉普森程序迭代求解每个增量结束时的解;根据收敛容差判断牛顿拉普森程序的收敛;如果迭代不收敛,减少增量步的大小;然后使用小增量步重新进行计算。
5.分析步、增量步、迭代步1)分析步仿真载荷历程含有一个或多个分析步。
2)增量步是分析步的一部分;在静态问题中,总载荷被分成很小的增量步。
以便可以沿着非线性路径求解。
3)迭代步迭代步是增量步中寻找平衡解得一次计算尝试。
5.牛顿拉普森方法Abaqus/Standard 基于牛顿拉普森方法的增量迭代求解技术,该方法是无条件稳定(任何大小的增量步都可以)。
增量步大小影响动态分析精度,每个增量步通常要求多次迭代才能满足收敛要求,每个分析步通常有多个增量步,牛顿拉普森定义了一个残差为0位移曲线。
6.牛顿拉普森方法基础。
平衡是u的非线性方程,牛顿拉普森迭代求解在Cu 处的线性方程,Cu是位移u的修正量。
7.残差定义为了得到线性方程组,重写一下平衡方程,R(u)是u的残差。
这个残差表示的是位移u处不平衡力。
非线性有限元解法

(9)
(10 )
•在增量方法中通常引入载荷因子λ,用 R R表示载荷, 于是非线性有限
元方程可写成: ( u, ) P( u ) R 0
(1)
用载荷因子λ系列: 0 0 1 2 M 1
(2)
相应于不同的载荷。
若相应于载荷因子 n 的解已经求得,记为 u un ,则 ( un ,n ) P( un ) n R 0
KT n
KT ( un
)
un
(8)
un1 un un
其收敛判据与直接迭代法的收敛判据雷同。
非线性有限元方程组的解法(增量法)
•求解非线性方程组的另一类方法是增量方法。使用增量方法的一个优点是 可以得到整个载荷变化过程的一些中间的数值结果。当问题的性质与加载的 历史有关时,例如弹塑性问题,则必须采用增量方法。
u1 ( K1 )1 R
据此容易写出直接迭代法的迭代公式:
Kn K( un )
un1 ( K n )|1 R
(2)
按照这种迭代公式可以得到一个解数列 { un } ,当这个数列收敛时停止计
算,其数列收敛值就是方程(1)的解。
非线性有限元方程组的解法(直接迭代法)
关于数列收敛的判据,可以采用各种各样的范数定义和收敛判据。若设第 n
( un ) K( un )un R 0
(7)
该值可作为对偏离平衡的一种度量(称为失衡力),收敛判据可相应地取为:
( un ) R
(8)
(失衡力收敛判据)
非线性有限元方程组的解法(牛顿法)
把非线性有限元方程记为: ( u ) P( u ) R 0 (1)
非线性有限元解法
现在设
u un
是方程(1)的第 n 次近似解。一般地,这时
( un ) P( un ) R 0
该值可作为对偏离平衡的一种度量(称为失衡力)。设修正值为 此时新的近似解为:
(2)
un
(3)
,
u un1 u n un
将(3)代入(1)中并在 u un 附近将 ( un un ) 泰勒(Taylor)展开: (4) ( un un ) ( un ) un un (5) n 若记 K K (u )
un un1 u n
范数的定义可取 或
(3) (4)
un max{ un }
un [{ un }t { un } ] 1/ 2
于是收敛判据可取为: un un (位移收敛判据) 在这里注意到,对于非线性方程(1),将 un 代入一般不是严格满足的,即
(5) (6)
( u ) K ( u )u R 0
非线性有限元方程组的解法
• 对于线弹性小变形问题,其有限元方程组是线性的
Ku R 0
• 其解答利用直接方法很容易得到 u K 1R • 但是对于非线性有限元方程组则不能利用直接方法 得到其解答。 • 一般地说,不能期望得到非线性方程组的精确界。 • 通常利用各种数值方法,用一系列的线性方程组去 逼近非线性方程组的解。
现在来求相应于载荷因子为1 n 时的解。 设 un1 un u 为其解, n 于是有 ( un u,n ) P( un u ) ( n )R 0 (4)
将 ( un u,n ) 在 un , n 处泰勒展开得
T T n
可得 n 1 n 1 从而可解出修正量 un 为 un ( K T ) ( un ) ( K T ) ( R P( un ))
非线性有限元

(三)混合法 如对同一非线性方程组混合使用增量
法和迭代法,则称为混合法或逐步迭代法。 一般在总体上采用Euler增量法,而在
同一级荷载增量内,采用迭代法。
Ki-1
刚度的取值可根据给定的应力-应变曲 线导出。若每级计算都采用上一级增量计算 终了时的刚度值,则称为始点刚度法。
Ki-1
始点刚度法类似于解微分方程初值问题 的欧拉(Euler)折线法,计算方法简单但计算 精度较低,容易“漂移”。
若采用中点刚度法则可以提高精度。该 法类似于解常微分方程初值问题的龙格-库塔 (Runge-Kutta)法,包括中点切线刚度法 和中点平均刚度法。
(1) 直接迭代法 对非线性方程组
设其初始的近似解为 ,由此确定近似的
矩阵
可得出改进的近似解
重复这一过程,以第i次近似解求出第i+1 次近似解的迭代公式为直接迭代法
对非线性方程组
直到 变得充分小,即近似解收敛时,终止迭代。
在迭代过程中,得到的近似解一般不会满足 作为对平衡偏离的一种度量,称为失衡力。
q-Newton—Raphson迭代法的计算过程
(2)初应力法 如果在弹性材料内确实存在初应力 ,则材料的应力应变关系为
由上式及虚功原理可导出单元的结点力为
集合单元得出以下的有限元方程 式中, 为由初应力 引起的等效结点荷载
初应力法就是将初应力看作是变化的, 以此来反映应力和应变之间的非线性关系。 通过不断地调整初应力,使线弹性解逼近非 线性解。
接触非线性 由于接触体的变形和接触边界的摩擦作用,
使得部分边界条件随加载过程而变化,且不 可恢复。这种由边界条件的可变性和不可逆 性产生的非线性问题,称为接触非线性。
材科非线性有限元法 材料非线性是由本构关系的非线性引
非线性有限元 第2章非线性代数方程组的解法

(简称修正的 Newton 法) 。此时,仅第一步迭代需要完全求解一个线 性方程组,并将三角分解后的 K T 存贮起来,以后的每一步迭代都采 用公式
0 1 i δ i ( K T ) ψ 0
0
(2-9)
i
图 2-5
这样,只需按式(2-9)右端的 ψ 进行回代即可。 修正 Newton 法的每一步迭代所用的计算时间较少,但迭代的收敛速度降低。为了提高 收敛速度,可引入过量修正因子 w 。在按(2-9)式求出 δ 之后,采用下式计算新解
F ψ i ) ( )i δ δ i i δ δ
(2-7)
对于单变量的非线性问题,其迭代过程见图 2-3 和 2-4,可以看出 K T ( ) 是 F ~ 曲线上
F ( )) 的切线斜率
9
Newton 法的收敛性是好的,但对某些非线性问题,如理想塑性和塑性软化问题,在迭 代过程中 K T 可能是奇异或病态的,于是 K T 的求逆就会出现困难。为此,可引入一个阻尼
i 1
) 后,再由它求出 δ i δ i ( K-15)
(K i ) 1 AB T
式可得
(2-16)
其中 A 和 B 均为 N×1 阶向量。将(2-16)式代入(2-14)后,再将(2-14)式代入(2-15)
11
AB T ψ i δ i ( K i ) 1 ψ i
其中 1 , 2 , , n 是未知量,ψ1 , ψ 2 , , ψ n 是 1 , 2 , , n 的非线性函数,现引用矢量记号
δ [ 1 2 n ]T ψ [ψ1 ψ 2 ψ n ]T
上述方程组可表示为
ψ ( δ) 0
非线性有限元ANSYS(liuheng)

弹塑性力学
对象;任意变形体 特征;变形(屈服、
非线性) 任意形状的体 变量: 1)材料弹塑物性描述 2)变形方面描述 3)力的平衡描述 方程(微体dxdydz): 1)物理本构方程 (屈服、非线性) 2)几何变形方程 3)力的平衡方程 三大变量—三大方程 求解:解析半解析法
非变形体(刚体)
变形体
非线性有限元ANSYS讲义——刘恒
变形体及其受力情况的描述
基本变量:
u
==》 ui ij ij
(位移) (应变) (应力)
(如研究xyz三个方向,对应张量描述)
基本方程: 1)材料方面
三大类变量
2)几何方面
3)力平衡方面 求解方法:
三大类方程
1)经典解析方法
2)半解析方法
3)传统数值求解方法
难易程度
很难
较难
简单
求解精度
高
较高
低
方程最后形式
常微分方程
差分方程 积分方程->线性方程组 线性方程组
方法规范性 不规范,技巧要求高 较规范 只要试函数确定,后续过程很规范
方法通用性
不好
较好
较好
很好
解题范围 简单问题(非常有限) 较复杂问题
较大
大
其它
具一定物理背景(最小残差) 最小势能
第二章
非线性有限元概述
Fa - Fnr = 0
收敛是平衡的度量。
非线性有限元ANSYS讲义——刘恒
收 敛(续)
Newton-Raphson 迭代过程如下所示。基于 u0 时的结 构构形,计算出切向刚度KT,基于F 计算出的位移增量 是u ,结构构形更新为 u1。
载荷
第6章 非线性有限元法(几何非线性)分析

FkiFkj ij dxidxi 2eijdxidxi
由于大变形问题有
2、限A元lm方an程sh主i应要变采用张量
T.L列式法或U.L列式 Alm法an建sh立i应,变因张此量应采在用初Eular运动 描述始方状法态,下即定按义当应前变状张态下的构 形定量义,应即变采张用量G。reen应
变ds张2 量d。s2 dxidxi dxidxi
dxidxi dxi Fki1Fkj1dx j
ij Fki1Fkj1 dxidxi 2Eij dxidxi
eij
1 2
FkiFkj ij
式中,eij称为Green应变张量或 Green-Lagrangian应变张量。
Eij
第六章 非线性有限元法(几何非线性)
1、变几形何非体线性的的有运限动元方描程一述 般采用T.L或U.L列式法建立!
变形体上的质点的运动状态 可以随不同的坐标选取以下几 种描述方法:
1、全拉格朗日列式法(T.L列式 法—Total Lagrangian Formulation):
选取t0=0时刻未变形物体的构 形A0作为参照构形进行分析。
uk xj
ij
ij
式中:
ij
1
ui
2 xj
u j xi
为小变形应变张量;
ij
1 2
uk xi
uk xj
为非线性二次项
2、Green变形张量也可写为:
eij
1 2
Cij
ij
式中,Cij是Cauchy变形张量
Cij FkiFkj
由于Cauchy变形张量是正定对称 阵,因此该张量有三个实特征值; 这些特征值的平方根记为材料的 主轴拉伸。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1. 轴对称问题的弹塑性分析
流程图 :
节点号,单刚等各项参数
EN1 存储单元节点号, 局部坐标系转
换为全局坐标
N
打印错误
调用子函数 DEMATR 求[D]
调用子函数 BMATR 求 [B]
切线刚度阵 [EK]=[S][Q1]=
· JD ·RN ·H(I1)H(J1)
返回各值
Y
读入单元号, B 矩阵位数,单刚位数,单元
开始
JD<0
[C]=[De ]
[B]
R=1
N
[C]=[Dep][B]
解析解。
厚壁筒受内压,采用Mises 屈服准则
经计算知,当t=()时,材料处于弹塑性交界面。
弹性区为:
塑性区:
交界处有:,
最后解得残余应力为:
(7a)
有限元网格信息图:(7b) (8a) (8b)
(1)
(2)
(3)
(4)
(5)
(6)
图1 有限元网格
输入数据文件内容(详细信息见附件):
DATA(1)
NNODE MELEM IFU IFW IPF IPR NPP NRM HAC MSF NULOAD EXP
NM(1-MELEM) NN
NN(1-NNODE) R Z
NFU(1-IFU) FU
NFW(1-IFW) FW
MPQ(1-IPF) NPQ*PQ
NPRNRZ(1-IPR) PRNRZ
E EMU SSS HH UNLOAD
对理想塑性材料厚壁筒,从初始状态开始,历经加载后完全卸载。
这一过程中,厚壁筒内会产生残余应力。
沿径向R的残余应力如图2-3 所示。
图 2 径向残余应力 -半径曲线
图 2-3 中分别给出了径向残余应力和切向残余应力随半径的变化, 比较。
从图中可以看出, 程序解和解析解在数值上能够很好的吻合, 大的地方
有少许偏差, 这验证了程序计算结果的正确性。
最大误差发生在径向残余应力达到
10
并且和解析解进行了 只是在径向残余应力最 -0.2
-0.4
-0.6
-0.8
-1
-1.2
-1.4
-1.6
12
14
16
Radius R
18
20
-5
-10
-15
图 3 切向残余应力 -半径曲线
最大的地方,达 %。
因此,程序计算结果能够得到精确度比较高的解。
对于不同线性硬化材料的厚壁圆筒,硬度对应力分布的影响如图 4-5 所示。
图 4 硬度分别为和时的径向应力曲线
图 5 硬度分别为和时的径向应力曲线
如图 4 所示,随着硬度的增加, 径向应力随之减小, 而最大径向应力不在厚壁筒的表面。
图 5 中显示了不同硬度下, 切向应力随半径的变化。
两种不同硬度下的应力曲线有交点, 这说明硬
度越大, 弹性应力范围也就越大。
弹塑性的分界层位于应力突变点。
变形首先是弹
性变形,应力的增量
1
-1
-2
-3
-4 -5 -6 Radius R
基本呈线性而且斜率比较大,这是弹性区;塑性变形区,应力基本保持为水平线。
弹塑性分界层的位置就是图5 中曲线的突变点,不同的硬度的分界位置会有少许差别。
轴对称问题的几何非线性分析
流程图:
计算[C]=[DE][BB],[CC]=[M][G]
[S]= ,SS=
[EK]= *JD*RN*H(I1)H(J1)+ *JD*RN*H(I1)H(J1)
有限元网格信息图(输入文件在附件中给出)
输入数据文件(详细信息见附件):
DATA(3)
NNODE MELEM IPU IFW IPF IPR NPP EXP
NM(1-MELEM) NN
NN(1-NNODE) R Z
NFU(1-IFU) FU
NFW(1-IFW) FW
MPQ(1-IPF) NPQ*PQ
NPRNRZ(1-IPR) PRNRZ
E
EMU
周边固支受均布载荷作用的圆板,中心点的载荷-位移曲线如图5 所示。
图 7 圆板中心点的载荷 - 位移曲线
如图 7 中所示,线性解和非线性解在很大程度上具有一致性。
在初始的小变形情况下, 线性解和非线性解结果是一致的; 随着变形的增大, 小变形线性假设已不再适用, 就会产生 几何分线性问题, 导致了线性解和非线性解的偏差。
线性解要大于非线性解, 随着变形的增 大,非线性程度的增加, 两种结果的差值也会增大。
对均布载荷为 10 的情况,非线性解为,
TL 法和 UL 法的误差分别为 %和%。
2 4 6 8 -1 0000
456
Delta P
8 9 10
TL solutions UL solutions -1.4 123
附件
第一题输入文件(data1)
43 8 0 34 1 0 10 2 1 6
1 7
1e-6 8
1 1 4 6 7 8 5 3 2
2 6 9 11 12 1
3 10 8 7
3 11 1
4 16 17 18 1
5 13 12
4 16 19 21 22 23 20 18 17
5 21 24 2
6 2
7 2
8 25 23 22
26 29 31 32 33 30 28 27 6 31 34 36 37 38 35 33 32 7
36 39 41 42 43 40 38 37 8
1 9
2 1 0
3 1 1
4 1 2
5 1 3
14 37 21
15 38 23
16 39 24
17 40 25
18 41 26
19 42 28
20 43 29
21 1 30
22 3 31
23 4 33
24 5 34
25 6 35
26 8 36
27 9 38
28 10 39
29 11 40
30 13 41
31 14 43
32 15 1 4 0 0
33 16
34 18
35 19
36 20
(Data2)
43 8 0 34 1 0 10 2 1 4 13 36
1 14 37
1e-6 15 38
1 1 4 6 7 8 5 3
2 16 39
2 6 9 11 12 1
3 10 8 7 17 40
3 11 1
4 16 17 18 1
5 13 12 18 41
4 16 19 21 22 23 20 18 17 19 42
5 21 24 2
6 2
7 2
8 25 23 22 20 43
6 26 29 31 32 33 30 28 2
7 21 1
7 31 34 36 37 38 35 33 32 22 3
8 36 39 41 42 43 40 38 37 23 4
1 24 5
2 25 6
3 26 8
4 27 9
5 28 10
6 29 11
7 30 13
8 31 14
9 32 15
10 33 16
11 34 18
12 35 19
20 30 40
21 31 41
23 33 43
24 34 1 4 0 0
25 35
26 36
28 38
29 39
第二题输入文件(data3)
43 8 6 2 8 0 10 1 11
1e-6 2 12
1 1 4 6 7 8 5 3
2
3 13
2 6 9 11 12 1
3 10 8 7
4 14
3 11 1
4 16 17 18 1
5 13 12 5 15
4 16 19 21 22 23 20 18 17 6 16
5 21 24 2
6 2
7 2
8 25 23 22 7 17
6 26 29 31 32 33 30 28 2
7
8 18
7 31 34 36 37 38 35 33 32 9 19
8 36 39 41 42 43 40 38 37 10 20
42 43 41 43 1 3 2 3 3 3 4 3 5 3 6 3 7 3 8 3 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 1 2 3 41。