simufact.welding焊接模拟教程.pdf
基于Simufact welding仿真在弧焊机器人教学中的研究

内燃机与配件0引言自2010年起我院开设焊接机器人应用与维护专业以来,培养焊工7000多人,焊接机器人操作大约5000多人,目前在校生焊工400多人。
为服务地方经济发展,培养以徐工集团为核心的制造型企业,探索一种高效、快捷、低成本的教学途径,提升学生焊接工艺参数设置能力,提高焊接机器人教学质量,本文研究将Simufact 焊接仿真应用到焊接机器人应用与维护专业教学中,以达到期望效果。
在焊接领域用于仿真模拟工具有许多,由于焊接加工过程是与温度、应力变形和冶金组织状态相互作用和影响、常会发生较为复杂的物理变化。
如果利用仿真模拟再现整个焊接过程对学生来说,不仅焊接工艺参数对焊缝成形影响有直观的感受,且能掌握建立焊接工艺各参数相互影响关系。
因此,在技工院校焊接机器人应用与维护专业教学过程中,运用Simufact welding 仿真软件对焊缝成形过程进行模拟教学有着重要的意义。
1Simufact 焊接有限元建立Simufact 焊接有限元焊接仿真通过导入焊接组件的网格化零件,构建有限元焊件模型;设置合理的环境参数和焊接参数对整个焊接过程进行高度模拟;最后,对Simufact 导出的数据和图像进行分析。
在导入网格化焊接组件时,建议运用多种网格方式,在焊缝周边较细的网格可以准确地获得高梯度温度。
如果出现网格的划分算法不太兼容的现象,建议对焊件进行独立网格划分的处理,这样会避免了不兼容现象的干涉和影响。
通常焊接件对兼容的网格设计既费时又有难度,所以,一般采用不兼容网格划分算法。
运用Solidworks三维软件建模后再Hypermesh 划分网格,最后保存。
建立仿真模型的建立是否合理直接关系到预处理时间,直观的用户界面对模拟过程起到事倍功半的效果。
在建立焊接结构时,可以用三维软件自行绘制焊接组件,如装夹夹具可以预定义组。
在运用有限元软件分析时,需要对焊件定义求解器、焊枪数量、设置跟踪点、加载焊件组件以及边界条件的设置。
Simufact.welding对压圈焊接变形分析

现 场分 别 对 同样 的三 个 压 圈进 行 焊 接 , 工 序 相
同, 全部 采用 手 工 电弧 焊 。焊接 过 程 及 相 关 参 数 如
下。
一
图 1 点焊完成后图片
1 0 一
S i mu f a e t . w e l d i n g对 压 圈焊 接 变 形 分 析
设 计 与研 究
参 数 名 点焊 电压 / V 点 焊 电 流/ A 焊 条直 径 / m m 单 条焊 缝 焊 接 长 度/ m m
参 数 值 2 5 l 2 5 3 . 2 5
列 电机 定 子压 圈 为分 析 对 象 , 通 过 车 间 采集 焊 接 参
数、 测 量焊 接变 形量 , 同时对 该焊 接件 在软 件 中进行 焊接仿 真 , 将仿 真结 果 与实测 结 果对 比, 以验证 仿 真 结果 的 可靠 性 。在 仿 真 软 件 中改 变 压 圈 的 焊 接 顺 序、 焊缝 位置 等焊 接参 数再 进行 多次 仿真 分析 , 以得 到最 佳 的焊 接工 艺参 数 。仿 真 计算 不仅 优化 了各 工
mm 压圈ቤተ መጻሕፍቲ ባይዱ3
变 形
0. 4 0. 4 0. 5 O. 4 0. 4 0. 2 0. 4 0. 5 0. 4 0. 5 0. 5
压圈 1
位置 2
62. 0 62. 3 63. 2 62. 2 61 . 8 61 . 9 61 . 7 61. 7 61. 6 6 2. 0 6 2. 0
压圈 2
变 形
0. 7 0. 5 —0. 2 0. 4 0. 4 0. 4 0. 5 0. 7 0. 7 0. 4 O. 7
位置 I
62. 2 62. 4 62. 6 62. 8 63. 0 6 2. 6 62. 8 6 2. 5 6 2. 4 6 2. 3 6 2. 3
Simufact.Welding 6.0 热源二次开发初步教程

Simufact.Welding 6.0 热源二次开发初步教程1 主要目的:开始随时间变化的焊接热源,如脉冲热源2 基本要求:1)脉冲热源频率:8Hz2)脉宽30ms3)其它略3 软件安装1)simufact.welding 6.02)VS20103)Intel Visual Fortran Composer XE 20133 基本步骤3.1 软件设置安装完之后需要配置path、Lib和include三个环境变量。
以下列出环境变量值作为参考(需要根据VS和fortran的安装位置不同进行相应的修改)。
---注:以下部分为参考网上容,需要根据具体实际修改,如下面采用的是VS2012,XE2015,根据需要修改Path:C:\Program Files (x86)\Microsoft Visual Studio 12.0\Common7\ToolsC:\Program Files (x86)\Intel\Composer XE 2015\redist\intel64\mklC:\Program Files (x86)\Intel\Composer XE 2015\bin\intel64C:\Program Files (x86)\Microsoft Visual Studio 12.0\Common7\IDEC:\Program Files (x86)\Windows Kits\8.1\Windows Performance Toolkit\C:\Program Files (x86)\Microsoft Visual Studio 12.0\VC\bin\amd64C:\Program Files (x86)\Microsoft Visual Studio 12.0\VC\binC:\Program Files (x86)\Microsoft SDKs\Windows\v7.0A\Bin\x64C:\Program Files (x86)\Microsoft SDKs\Windows\v7.1A\BinC:\Program Files (x86)\Intel\MPI\5.0.1.037\intel64\binC:\Program Files (x86)\Intel\Trace Analyzer and Collector\9.0.1.035\binLib:C:\Program Files (x86)\Intel\Composer XE 2015\compiler\lib\intel64C:\Program Files (x86)\Intel\Composer XE 2015\mkl\lib\intel64C:\Program Files (x86)\Microsoft Visual Studio 12.0\VC\lib\amd64C:\Program Files (x86)\Microsoft Visual Studio 12.0\VC\libC:\Program Files (x86)\Microsoft SDKs\Windows\v7.1A\Lib\x64C:\Program Files (x86)\Microsoft SDKs\Windows\v7.1A\LibINCLUDE:C:\Program Files (x86)\Intel\Composer XE 2015\compiler\includeC:\Program Files (x86)\Intel\Composer XE 2015\mkl\includeC:\Program Files (x86)\Microsoft Visual Studio 12.0\VC\includeC:\Program Files (x86)\Microsoft SDKs\Windows\v7.1A\Includea3.2 常规建立并设置simufact.welding工程建立如下常规的simufact.welding工程(常规建立过程省略)图1 常规工程主要坐标系为:沿X方向宽50mm,沿y方向板厚10mm,沿z方向长度50mm,焊接沿着z 负方向,焊接起始点坐标(50,10,-50)【单位mm】,建立对称的一半模型。
基于Simufact外拘束的Q345钢T形焊接仿真

基于Simufact外拘束的Q345钢T形焊接仿真黄明;张建;龚明胜;胡忠健【摘要】为了提高焊接质量,简化焊条电弧焊焊接的实验过程,运用Simufact-Welding软件对Q345钢进行T形平焊仿真,对比分析采用不完全外拘束和完全外拘束两种焊接方法时焊件在焊接过程中和焊后焊缝处的变形和应力.结果表明,该仿真过程中,在其他参数不变的情况下,焊件不完全外拘束方法下焊缝处采样点的变形是非瞬态的,完全外拘束方法下焊件焊缝处采样点的变形是瞬态变形,完全外拘束方法下焊件焊缝处采样点的平均主拉应力和平均主压应力比不完全外拘束方法下进行焊接时普遍要显著.因此完全外拘束方法下焊件进行焊接时应采取合理的焊接方法,焊接时适当降低焊件的刚度,先焊收缩量大的焊缝,同时在焊件的适当部位进行局部预热.【期刊名称】《电焊机》【年(卷),期】2016(046)007【总页数】5页(P28-32)【关键词】Simufact;焊条电弧焊;T形平焊仿真;不完全外拘束;完全外拘束【作者】黄明;张建;龚明胜;胡忠健【作者单位】毕节市工业学校,贵州毕节551700;毕节市工业学校,贵州毕节551700;毕节市工业学校,贵州毕节551700;毕节市工业学校,贵州毕节551700【正文语种】中文【中图分类】TG444+.1采用焊条电弧焊焊接时存在热的传递,焊接部位要经历不均匀的加热和冷却历程,导致焊接结构产生变形和应力,从而使后续加工与装配比较困难,焊接应力会导致焊接接头产生冷、热裂纹等缺陷,焊接结构破坏事故大多是由焊接应力和变形引起的[1-6]。
因此,为了提高焊接结构的安全性和可靠性,简化焊条电弧焊焊接的实验过程,采用Simufact-Welding软件对Q345钢的T形接头进行平焊仿真,对比分析采用不完全外拘束和完全外拘束两种焊接方法下焊件在焊接过程中和焊后焊缝处的变形和应力。
1.1 传导焊条电弧焊热传导现象满足傅里叶定律,其关系式为式中λ为热导率[单位:W/(m·K)];T为温度(单位:K);为温度梯度;qc为热流密度(单位:W/m2)。
simufact.welding焊接模拟教程(2020年整理).doc

simufact.welding焊接模拟教程案例文件,请使用simufact.welding3.1.0及以上版本打开之前一直都是发的forming的教程,而simufact.welding网上的资料相对较少,其实simufact.welding软件也是一款很不错的软件,以往我们做焊接非线性大多数都是用marc,但是marc那个不人性化的界面,以及建模的复杂,让新手们望而却步。
simufact基于marc和ife.weldsim两个求解器,取长补短,开发了极易使用的模拟软件,今天我就带大家一起来体验一下吧。
欢迎捧场噢!1、打开simufact.welding3.1.0软件。
点击新建按钮创建一个新的仿真模拟。
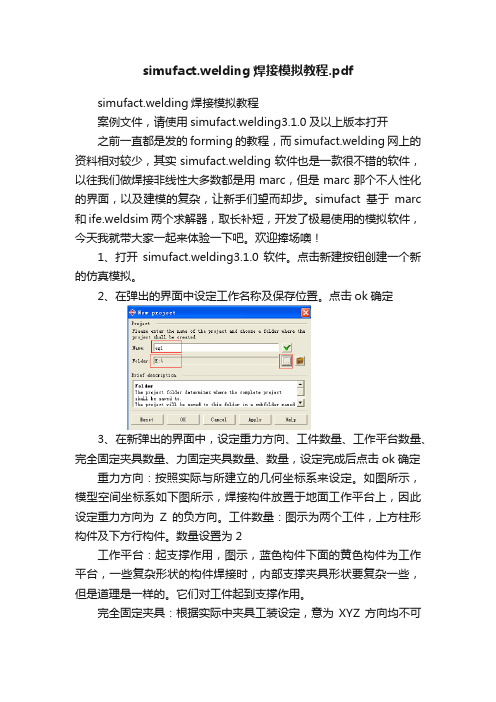
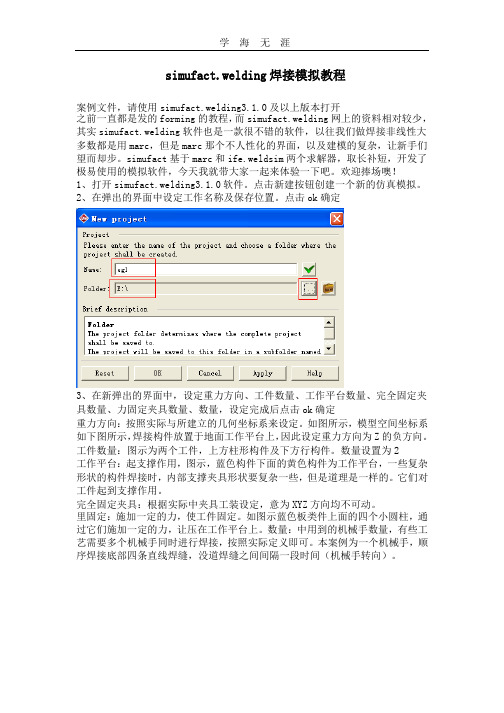
2、在弹出的界面中设定工作名称及保存位置。
点击ok确定3、在新弹出的界面中,设定重力方向、工件数量、工作平台数量、完全固定夹具数量、力固定夹具数量、数量,设定完成后点击ok确定重力方向:按照实际与所建立的几何坐标系来设定。
如图所示,模型空间坐标系如下图所示,焊接构件放置于地面工作平台上,因此设定重力方向为Z的负方向。
工件数量:图示为两个工件,上方柱形构件及下方行构件。
数量设置为2工作平台:起支撑作用,图示,蓝色构件下面的黄色构件为工作平台,一些复杂形状的构件焊接时,内部支撑夹具形状要复杂一些,但是道理是一样的。
它们对工件起到支撑作用。
完全固定夹具:根据实际中夹具工装设定,意为XYZ方向均不可动。
里固定:施加一定的力,使工件固定。
如图示蓝色板类件上面的四个小圆柱,通过它们施加一定的力,让压在工作平台上。
数量:中用到的机械手数量,有些工艺需要多个机械手同时进行焊接,按照实际定义即可。
本案例为一个机械手,顺序焊接底部四条直线焊缝,没道焊缝之间间隔一段时间(机械手转向)。
4、在软件catalog空白区域点击鼠标右键,在弹出的对话框中选择Geometries(几何)——Import(导入),然后在弹出的对话框中选择要导入的几何模型,可以一次性导入所有模型,在后面弹出的单位选择对话框中选择你建模时所用的单位,然后将use for all geometries前面勾选,意为所有几何模型的单元都采用当前单位。
锻造仿真软件simufact.forming公司介绍
锻造仿真软件simufact.forming公司介绍先进和便捷的⾦属成形仿真系统 ——simufactSimufact软件介绍内容usimufact发展历程u⾦属塑性成形模拟技术 u usimufact功能介绍软件应⽤实例⼀、产品发展历程Simufact Engineering Gmbhu u u u u u usimufact是世界知名的CAE公司,总部位于德国成⽴于1995年,软件开发团队不断发展与壮⼤ 1995年成为MSC和MARC公司的商业合作伙伴致⼒于⾦属成形和制造⼯艺仿真不断加强与⼤学和⾏业组织的合作⽬前已成为四个国际⾦属加⼯协会的会员超过10年的软件开发、销售、培训以及客户⽀持经验Balve Marburg FuldaHamburgKasselSimufact 发展历程Release nubering:1.02.03.04.05.06.07.08.01996MARC/ Autoforge 1.21998 1999 2000 2001 2002 2003MSC.SuperForm 2002 MSC.SuperForm 2003 MSC.SuperForm 20042005 2006 2007simufact.forming Release 8.0MARC/ Autoforge 2.2 MSC/ Autoforge 2.3 MSC/ Autoforge 3.1MSC.Manufacturing 2005Superforge x.y Superforge u.vMSC.SuperForge 2004 MSC.SuperForge 2003MSC.SuperForge 2002MARC/ MSC MARC/ MSC Merger Mergerrenaming renaming Autoforge AutoforgeMSC.Manufacturing MSC.Manufacturinglicense license combining combining产品核⼼技术Simulating Manufacturingreal integrated solution of … MSC.SuperForm MSC.Marc MSC.SuperForge MSC.Dytran产品模块l l l l l l l l⾦属成形⼯艺模拟环境机械连接⼯艺仿真模块焊接⼯艺仿真模块材料数据库模拟结果分析⼯模具载荷分析⽹格划分模块机构运动模块⾦属成形模拟是simufact的最主要模块 (锻造、轧制、拉拔、挤压、冲压)Simufact 软件适⽤的领域u⾦属成形⼯艺分析包括锻造、轧制、旋压、挤压、拉拔、剪切等体积成形⼯艺和板料成形⼯艺,同时也可以进⾏变形和传热的耦合分析,例如热成形或温成形⼯艺、以及材料的加热和冷却过程。
Simufact.Welding-6.0-热源二次开发初步教程

Simufact.Welding 6.0 热源二次开发初步教程1 主要目的:开始随时间变化的焊接热源,如脉冲热源2 基本要求:1)脉冲热源频率:8Hz2)脉宽30ms3)其它略3 软件安装1)simufact.welding 6.02)VS20103)Intel Visual Fortran Composer XE 20133 基本步骤3.1 软件设置安装完之后需要配置path、Lib和include三个环境变量。
以下列出环境变量值作为参考(需要根据VS和fortran的安装位置不同进行相应的修改)。
---注:以下部分为参考网上内容,需要根据具体实际修改,如下面采用的是VS2012,XE2015,根据需要修改Path:C:\Program Files (x86)\Microsoft Visual Studio 12.0\Common7\ToolsC:\Program Files (x86)\Intel\Composer XE 2015\redist\intel64\mklC:\Program Files (x86)\Intel\Composer XE 2015\bin\intel64C:\Program Files (x86)\Microsoft Visual Studio 12.0\Common7\IDEC:\Program Files (x86)\Windows Kits\8.1\Windows Performance Toolkit\C:\Program Files (x86)\Microsoft Visual Studio 12.0\VC\bin\amd64C:\Program Files (x86)\Microsoft Visual Studio 12.0\VC\binC:\Program Files (x86)\Microsoft SDKs\Windows\v7.0A\Bin\x64C:\Program Files (x86)\Microsoft SDKs\Windows\v7.1A\BinC:\Program Files (x86)\Intel\MPI\5.0.1.037\intel64\binC:\Program Files (x86)\Intel\Trace Analyzer and Collector\9.0.1.035\binLib:C:\Program Files (x86)\Intel\Composer XE 2015\compiler\lib\intel64C:\Program Files (x86)\Intel\Composer XE 2015\mkl\lib\intel64C:\Program Files (x86)\Microsoft Visual Studio 12.0\VC\lib\amd64C:\Program Files (x86)\Microsoft Visual Studio 12.0\VC\libC:\Program Files (x86)\Microsoft SDKs\Windows\v7.1A\Lib\x64C:\Program Files (x86)\Microsoft SDKs\Windows\v7.1A\LibINCLUDE:C:\Program Files (x86)\Intel\Composer XE 2015\compiler\includeC:\Program Files (x86)\Intel\Composer XE 2015\mkl\includeC:\Program Files (x86)\Microsoft Visual Studio 12.0\VC\includeC:\Program Files (x86)\Microsoft SDKs\Windows\v7.1A\Includea3.2 常规建立并设置simufact.welding工程建立如下常规的simufact.welding工程(常规建立过程省略)图1 常规工程主要坐标系为:沿X方向宽50mm,沿y方向板厚10mm,沿z方向长度50mm,焊接沿着z 负方向,焊接起始点坐标(50,10,-50)【单位mm】,建立对称的一半模型。
Simufact.welding 7.0 更新说明(中文版)

后处理与结果管理
添加图例范围以同步查看视图 质点的默认动作是现在“显示结果” 质点前的结果现在只包含在模拟中计算的结果值(即:仅在 热模型中的没有机械结果) 如果在模拟过程中,结果视图显示最后一个现有增量,则视 图显示结果刷新后的最后计算增量 删除结果时添加了进度条
通过RMC在现有结果上激活
后处理与结果管理
改进结果转换
参考形状和结果可以同时在模型中显示,以便在结果视图中实现更 好的可视化
后处理与结果管理
改进结果转换
3-2-1平面定义允许通过在Z平面上选取点3,y平面上点2,和模型x平 面上的点1来定义三个平面
后处理与结果管理
改进结果转换
重组显示设置,包括默认颜色的复位 T16文件的输出从设置移动到求解器属性
Simufact.welding 7新功能
前处理和模型视图
前处理和模型视图
采用实体壳单元代替薄壁结构的六面体单元
优点:
计算时间更快 更容易的网格划分(不需要厚度方向使用多层单元→更好的 单元质量,平面单元边缘可以更大,更少的单元需求) 在变形和应力方面,结果与实体网格相当 混合(实体和实体壳)模型可能 在GUI界面可能将六面体网格转化为实体壳
后处理与结果管理
改进结果转换
那些平面定义了一个与全局坐标系成为超级位置的正交坐标系 如果在参考体上定义了参考系,则该坐标系用于超级位置而不是全 局坐标系
后处理与结果管理
改进结果转换
3点定义通过定义原点,x和y方向来定义坐标系
后处理与结果管理
改进结果转换
测量表允许定义一个表平面和局部坐标系 该表格平面在GUI中可视化
simufact.welding焊接模拟教程.pdf
simufact.welding焊接模拟教程.pdfsimufact.welding焊接模拟教程案例文件,请使用simufact.welding3.1.0及以上版本打开之前一直都是发的forming的教程,而simufact.welding网上的资料相对较少,其实simufact.welding软件也是一款很不错的软件,以往我们做焊接非线性大多数都是用marc,但是marc那个不人性化的界面,以及建模的复杂,让新手们望而却步。
simufact基于marc 和ife.weldsim两个求解器,取长补短,开发了极易使用的模拟软件,今天我就带大家一起来体验一下吧。
欢迎捧场噢!1、打开simufact.welding3.1.0软件。
点击新建按钮创建一个新的仿真模拟。
2、在弹出的界面中设定工作名称及保存位置。
点击ok确定3、在新弹出的界面中,设定重力方向、工件数量、工作平台数量、完全固定夹具数量、力固定夹具数量、数量,设定完成后点击ok确定重力方向:按照实际与所建立的几何坐标系来设定。
如图所示,模型空间坐标系如下图所示,焊接构件放置于地面工作平台上,因此设定重力方向为Z的负方向。
工件数量:图示为两个工件,上方柱形构件及下方行构件。
数量设置为2工作平台:起支撑作用,图示,蓝色构件下面的黄色构件为工作平台,一些复杂形状的构件焊接时,内部支撑夹具形状要复杂一些,但是道理是一样的。
它们对工件起到支撑作用。
完全固定夹具:根据实际中夹具工装设定,意为XYZ方向均不可动。
里固定:施加一定的力,使工件固定。
如图示蓝色板类件上面的四个小圆柱,通过它们施加一定的力,让压在工作平台上。
数量:中用到的机械手数量,有些工艺需要多个机械手同时进行焊接,按照实际定义即可。
本案例为一个机械手,顺序焊接底部四条直线焊缝,没道焊缝之间间隔一段时间(机械手转向)。
4、在软件catalog空白区域点击鼠标右键,在弹出的对话框中选择Geometries(几何)——Import(导入),然后在弹出的对话框中选择要导入的几何模型,可以一次性导入所有模型,在后面弹出的单位选择对话框中选择你建模时所用的单位,然后将use for all geometries前面勾选,意为所有几何模型的单元都采用当前单位。
simufact.welding焊接软件操作
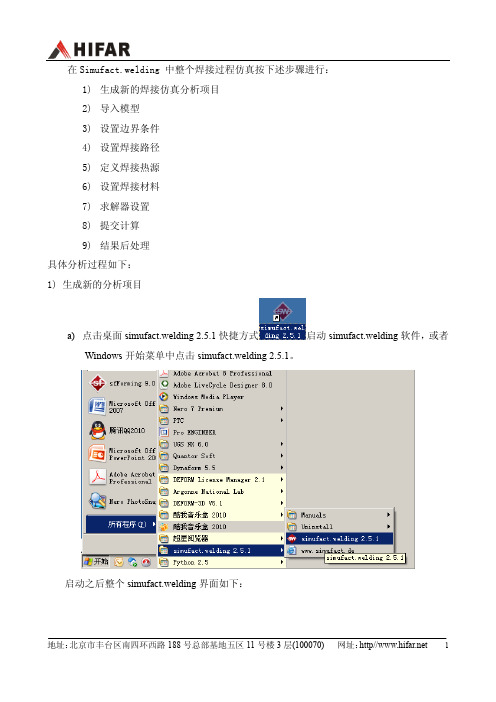
在Simufact.welding 中整个焊接过程仿真按下述步骤进行:1)生成新的焊接仿真分析项目2)导入模型3)设置边界条件4)设置焊接路径5)定义焊接热源6)设置焊接材料7)求解器设置8)提交计算9)结果后处理具体分析过程如下:1)生成新的分析项目a)点击桌面simufact.welding 2.5.1快捷方式启动simufact.welding软件,或者Windows开始菜单中点击simufact.welding 2.5.1。
启动之后整个simufact.welding界面如下:b)选择并按下extras→settings菜单。
c)弹出settings对话框,选择units/unit system。
Simufact.Welding焊接仿真软件提供五种单位制形式:International system of units (SI system)SI-mm unit systemImperial unit system——英制单位United States Customary System——美制单位User-defined unit system选择user-defined unit system,自行设置单位。
比较重要的单位:时间(s)、温度(℃)、长度(mm)和压强(MPa),设置好之后点击apply。
d)点击directories设置存储路径。
点击按钮弹出对话框,设置存储路径,也可进行其它路径的设置,点击apply,点击OK,关闭settings窗口。
e)点击菜单栏project→new新建分析项目。
输入项目名称。
此名称不能超过20个字符,且字符范围为:“A-Z”,“a-z”、“0-9”和连字符。
点击OK。
弹出分析项目设置对话框,可在窗口右端description中输入此分析项目的相关信息,其他设置如下:设置周围环境温度ambient temperature、重力加速度gravity、求解器solver及仿真所需模型部件components 数量的设置。
Simufact.welding实际案例分析

3.1有限元模型的建立有限元模型:材料:16MnCr5,常温屈服应力约为400Mpa 左右。
焊接两个零部件相连处的三道焊缝 焊接工艺及参数:采用机械手进行焊接,焊缝之间移动时间约为8S ,整个焊接过程约为650S 。
焊接参数:焊接电压:30V ,焊接电流150A ,焊接速度400cm/min ;图8为建立的焊接仿真模型。
图8为建立的焊接仿真模型为了分析3条焊缝采用何种焊接顺序焊后变形最小,我们需要计算不同焊接顺序合焊接方向。
经过初步分析,一共三条焊缝,同时考虑焊接先后顺序和焊接方向时,一共有24种不同的工艺。
如图9所示,如图9(a)表示的焊接工艺,先焊“1”,然后顺时针依次焊接“2”和“3”,焊接方向按照顺时针为“+”,逆时针为“-”,我们就将这种工艺表示为:“123”,以此为标准。
如图9(b)所示的工艺,先焊“2”,方向为逆时针,因此表示为“-2“。
然后顺时针焊“1”,最后顺时针焊“3”。
就表示为:“-213”。
(a )123 (b )-213图9 焊接顺序和焊接方向示意图3.2 结果分析在Simfact.welding 中,焊接宏观分析主要有三方面,即焊接残余应力分析、焊后变形分析和焊接温度场分析。
在工程上,前两种分析更为重要,更具有实际意义。
经过计算24种不同焊接顺序和焊接方向后,得到了如下结果:其中有7种工艺由于变形量较大,导致计算不收敛。
由于-132与-123基本类似,得知-123计算不收敛后,于是没有对-132进行计算。
这里我们仅对计算完成的进行详细结果分析。
表1为计算结果211-23的详细列表:工艺序号计算结果工艺序号计算结果工艺序号计算结果工艺序号计算结果1 2 3 计算完成-1 2 3 不收敛-1 -2 3 计算完成-1 2 -3 不收敛1 32 计算完成-13 2 没有计算-1 -3 2 计算完成-1 3 -2 计算完成2 3 1 不收敛-2 3 1 计算完成-2 -3 1 计算完成-2 3 -1 计算完成2 13 计算完成-2 1 3 计算完成-2 -1 3 计算完成-2 1 -3 计算完成3 1 2 计算完成-3 1 2 不收敛-3 -1 2 不收敛-3 1 -2 计算完成3 2 1 计算完成-3 2 1 不收敛-3 -2 1 计算完成-3 2 -1 不收敛表1 计算结果汇总图10所示为以上7种不收敛情况的计算结果。
Simufact.welding 5.0 中文教程 - 第六章

6 电阻点焊(Resistance spot welding )目录6.1电阻焊基本知识点 (4)6.2工件的电阻特性 (5)6.3电阻焊的仿真计算 (7)6.4焊枪运动与电极库 (8)6.5Simufact.welding中的电阻点焊仿真 (9)6.6后处理 (20)6.6.1电势 (20)6.6.2电流密度 (22)6.6.3热-电能量密度 (22)6.6.4接触导电率 (22)6.7几个注意点 (23)6.8局限性 (23)6.9参考文献 (24)关键词:电阻点焊、3D、网格自动细化教程级别:焊接仿真基础培训、Simufact.welding基础培训。
主要内容:本章节讲述的是基本电阻点焊的理论、应用背景以及如何simufact.welding中建立仿真过程,并且详细阐述了电阻点焊的后处理注意点。
图6.1 电阻点焊仿真案例6.1电阻焊基本知识点电阻焊工艺因其适用范围广,对材料的作用影响区很小,并且在生产过程中很容易进行质量管理等优点,如今已经广泛地被应用在汽车制造业中。
电阻焊有多种不同的焊接类型,不过他们都是基于焦耳作用产生热源的。
下表显示了不同类型的区别。
●电阻点焊(Resistance spot welding)●凸焊(Projection welding)●滚焊(Seam welding)●电阻电容焊(Capacitor discharge welding)图6.2 电阻焊的各种分类电阻焊是一种将两个导电组件在接触部位局部加热熔化,然后进行连接的焊接工艺。
熔化区域冷却凝固,会产生一个牢固的焊接接头,这是一个由外部作用力和温度扩散同时作用的过程。
电阻焊可以被看成是一系列电阻的串联模型,最大的电阻可以视为是电能转化为热能的主要因素。
如下图所示的串联电路:图6.3 电阻焊工艺的简化示意图焦耳热效应,是指将电能(电子的动能)转化为热能(导体原子的动能)。
对于一个稳定电流电路来说,其热通量可以由以下公式表示:公式6.1 稳定电路的热通量6.2工件的电阻特性如上所述,电阻焊工艺可以简化成一系列电阻串联的模型。
基于Simufact Welding的岸边集装箱起重机主梁分段腹板焊接变形数值模拟

基于Simufact Welding 的岸边集装箱起重机主梁分段腹板焊接变形数值模拟周建民1韩绍华2陆 凡2卢玉春1杜 渝11上海振华重工(集团)股份有限公司 上海 200125 2福州大学机械工程及自动化学院 福州 350108摘 要:焊接过程中的不均匀受热会导致构件变形,焊接变形严重影响着结构的尺寸精度以及承载能力等。
针对岸边集装箱起重机主梁结构复杂、焊缝众多、焊接变形复杂的情况,采用Simufact Welding 有限元仿真软件对岸边集装箱起重机主梁分段腹板的焊接进行模拟仿真计算,得到了焊接应力场和焊后变形的分布情况。
通过对焊接变形的预测来为实际焊接工艺提供指导依据,提高了生产效率。
关键词:岸边集装箱起重机;主梁;腹板焊接;Simufact Welding;模拟仿真中图分类号:U653.921 文献标识码:A 文章编号:1001-0785(2020)17-0042-05Abstract: Uneven heating during welding will lead to deformation of components and seriously affect the dimensional accuracyand bearing capacity of the structure. Considering the complex structure, numerous welds and complex welding deformation of the main girder of the quayside container crane, the Simufact Welding finite element simulation software is used to simulate the welding of the segmented web of the main girder of the quayside container crane, so as to obtain the distribution of welding stress field and deformation after welding. The welding deformation is predicted to provide guidance for the actual welding and improve the production efficiency.Keywords: quayside container crane; main girder; web welding; Simufact Welding; analog simulation0 引言岸边集装箱起重机(以下简称岸桥)是港口装卸集装箱的重要设备,其制造质量是影响结构承载能力的重要因素之一[1]。
基于simufact.welding的中厚板多层多道焊数值模拟分析

• 95•针对中厚板的多层多道混合气体保护焊在焊接过程中焊接顺序对焊接质量的影响,特别是焊接应力导致的焊接形变问题。
本文采用simufact.welding 焊接仿真软件对焊接过程进行数值模拟分析,对V 型焊缝进行建模仿真分析,得出不同焊接顺序对焊接形变的影响。
实验表明:顺序焊接比交叉焊接的最终焊接形变量更小,反向顺序最终焊接形变量略小于正向焊接形变量。
随着工业焊接自动化的发展,自动化焊接技术在制造业中发挥着越来越大的作用,但是由于焊接过程是一个受热不均匀的热循环过程,焊接过程中冷金属与热金属形变的不一致性导致焊接母材产生焊接应力,进而影响了焊接构件的最终焊接质量。
焊接结构破坏事故许多是由焊接应力和焊接变形所引起的。
其中,焊接形变和焊接裂纹是最普遍的现象。
本文以中厚板三层六道V 型焊缝为研究对象,运用simufact.welding 焊接仿真软件研究不同焊接顺序对焊接形变的影响,为实际中厚板多层多道焊接提供了指导意义。
1 焊接模型利用S o l i d w o r k s 进行焊接三维模型构建,包括了两块200mm ×200mm ×10mm 的Q235低碳钢板、六条焊道且钢板一侧打磨有45°角的坡口。
确定好装配关系后将焊接三维模型保存为parasolid 格式文件,再将该模型导入Hypermesh 软件进行网格划分,获得其有限元模型,生成bdf 格式文件后将其导入simufact.welding 几何模型之中进行仿真实验。
此外,在simufact.welding 软件中绘制焊接构件支撑平台,并且对焊接构件施加非完全约束,分别位于钢板的四个顶点用于模拟实际焊接过程中的固定夹具,每个夹具施加以200N 的力,方向垂直于钢板向下。
整体焊接有限元模型如图1所示,焊道有限元模型如图2所示。
2 simufact.welding环境参数配置2.1 热源模型选择常见的焊接热源模型有高斯热源模型、椭圆模型和双椭圆模型。
simufact钣金冲压及焊接一体化仿真

Simufact.forming钣金冲压及焊接一体化仿真整体解决方案西模发特信息科技(上海)有限公司2014年1月27日目录一、钣金冲压及焊接一体化仿真软件购买的必要性 (3)二、钣金冲压及焊接一体化仿真软件的组成部分和技术要求 (6)2.1、钣金冲压及焊接一体化仿真软件的主要组成部分 (6)2.2、钣金冲压及焊接一体化仿真软件的主要技术要求 (7)三、Simufact材料加工一体化仿真软件整体解决方案 (9)3.1 德国SIMUFACT ENGINEERING公司介绍 (9)3.2 Simufact材料加工一体化仿真软件介绍 (10)3.3 simufact软件工作原理 (12)3.4 simufact国内客户成功案例 (12)3.4.1钣金成形案例 (12)3.4.2旋压案例......................................................................... 错误!未定义书签。
3.4.3热处理案例..................................................................... 错误!未定义书签。
3.4.4焊接案例 (13)3.5 simufact软件推荐配置 ............................................................. 错误!未定义书签。
3.6 simufact硬件参考配置 (17)3.7售后服务能力介绍 (17)四、结论 (18)一、钣金冲压及焊接一体化仿真软件购买的必要性现实钣金冲压生产过程中大部分零部件都通过先冲压后焊接装配加工生产出来,首先,影响以上工艺的因素众多。
这些参数均会对零件本身产生影响,如果工装设计或工艺参数不合理,将会导致产品出现缺陷,造成人力和物力资源的浪费。
传统的冲压及焊接工艺工装设计主要依据经验数据,工作量大、周期长、效率低、费用高、缺少科学性和预见性。
Simufact.welding 5.0 中文教程 - 第六章
6 电阻点焊(Resistance spot welding )目录6.1电阻焊基本知识点 (4)6.2工件的电阻特性 (5)6.3电阻焊的仿真计算 (7)6.4焊枪运动与电极库 (8)6.5Simufact.welding中的电阻点焊仿真 (9)6.6后处理 (20)6.6.1电势 (20)6.6.2电流密度 (22)6.6.3热-电能量密度 (22)6.6.4接触导电率 (22)6.7几个注意点 (23)6.8局限性 (23)6.9参考文献 (24)关键词:电阻点焊、3D、网格自动细化教程级别:焊接仿真基础培训、Simufact.welding基础培训。
主要内容:本章节讲述的是基本电阻点焊的理论、应用背景以及如何simufact.welding中建立仿真过程,并且详细阐述了电阻点焊的后处理注意点。
图6.1 电阻点焊仿真案例6.1电阻焊基本知识点电阻焊工艺因其适用范围广,对材料的作用影响区很小,并且在生产过程中很容易进行质量管理等优点,如今已经广泛地被应用在汽车制造业中。
电阻焊有多种不同的焊接类型,不过他们都是基于焦耳作用产生热源的。
下表显示了不同类型的区别。
●电阻点焊(Resistance spot welding)●凸焊(Projection welding)●滚焊(Seam welding)●电阻电容焊(Capacitor discharge welding)图6.2 电阻焊的各种分类电阻焊是一种将两个导电组件在接触部位局部加热熔化,然后进行连接的焊接工艺。
熔化区域冷却凝固,会产生一个牢固的焊接接头,这是一个由外部作用力和温度扩散同时作用的过程。
电阻焊可以被看成是一系列电阻的串联模型,最大的电阻可以视为是电能转化为热能的主要因素。
如下图所示的串联电路:图6.3 电阻焊工艺的简化示意图焦耳热效应,是指将电能(电子的动能)转化为热能(导体原子的动能)。
对于一个稳定电流电路来说,其热通量可以由以下公式表示:公式6.1 稳定电路的热通量6.2工件的电阻特性如上所述,电阻焊工艺可以简化成一系列电阻串联的模型。
焊接仿真分析-不规则焊缝的建立

任意变截面的曲线焊缝
3D → solid map → line drag
• Elems to drag:选择拖拽的2D源网格 • Elems to match:选择拖拽的终点匹配网格 • Along geom:拖拽边界线 • Along parameters:拖拽网格尺寸
谢谢!
西模发特信息科技(上海)有限公司
地址:上海市长宁区仙霞路350号科创楼816室 电话:021 52396582 传真:021 52396582 info@
Simufact.welding 4.0 培训系列教程
Simufact.welding 4.0 培训系列教程
任意变截面的曲线焊缝
分别对1-2,2-3,3-4进行三次重复操作。
Simufact.welding 4.0 培训系列教程
任意变截面的曲线焊缝
自动连接形成完整的焊缝层:solid map
Simufact.welding 4.0 培训系列教程
任意变截面的曲线焊缝
• 2D → automesh → 控制网格质量 • 3D → drag/line drag → 拖拽形成实体网格 • Mask → 3D only → 仅导出实体网格
Simufact.welding 4.0 培训系列教程
任意变截面的曲线焊缝
在CAD软件中得到关键位置的截面形状
• 取1、2、3、4个位置,精确绘制其横截面形状
任意变截面的曲线焊缝
保证四个位置的截面2D网格是相似的
• 各相似边的划分数目需要保持一致
Simufact.welding 4.0 培训系列教程
任意变截面的曲线焊缝
在四个位置之间,分割辅助线
Simufact焊接软件简介

2进程树:仿真所需数据,2 个焊接进程仿真所需条目:•几何模型•焊接路径、热源•材料•初始温度•其它设定Windows 图形显示界面:显示模型和结果,可同时打开多个界面夹具固定、力、随时间激活允许分离固定单独固定,每个方向均固定3In the Process Explorer first all devices are described, containing their geometries (Finite Element mesh), initial temperatures and material.Further you find the welding tools , that can be Bearings, Fixings and Clampings.After that all robots are described by their trajectories, fillets and fillet materials.That, if present, results appear as an own entry.On top of each process you find the solver settings, which are very simple to define even if a full non-linear coupled analysis with MSC.Marc is invoked.In the Catalog are external read in as mesh-files in NASTRAN format.The description of weld paths and special welding heat sources are stored in the trajectory-items. Paths can be imported in different formats, which is very useful forROBOCAD data support.4Heat sources:A combination is possibleu3-D -Goldak volume source for:u GMA Welding (Gas Metal Arc Welding), u MIG (Metal Inert Gas Welding) uMAG (Metal Active Gas Welding)uGaussian surface distribution together with constant key-hole-volume source for:u EB Welding (Electronic Beam) uLaser WeldingFurther Features:u Im-and Export interface for Weldpaths as CSV datau Automatic filler element creator for additional welding materialu Im-and Export interface for geometries as NASTRAN bulk datau Im-and Export interface for materials as XML datau Pre defined material data for 12 materials right now, steady in developmentu Fast thermal pre analysis for weld heat source calibration using cutting images as patternu Result tables for user selected track points as chart curves including im-and export56Material behaviour is defined by:u Youngs modulus (temperature depended)u Densityu Poissons ratio (temperature depended)u Thermal expansion (temperature depended)u Thermal conductivity (temperature depended)u Specific heat capacity (temperature depended)u Latent heatu Solidus and liquidus temperatureu Flow stress curves (temperature-, strain-and strain-rate depended)uAdditional microstructure/ phasetransfromation can be taken into account(from November 2010 on)simufact.welding: Material7Welding processes are highly time depended. A simple time management is very important for the user.Simufact.welding supports many robots in one process. Each of them is administrated in anoverview dialog, while the process in total can be overviewed in a time schedule:simufact.welding: GUI8The Gaussian Volume Model for GMA-, Arc-, (EB-) Welding9A cylindrical source connected with a gaussian surface distribution for Laser Welding (EB-Welding).10The orientation of heat sources sometimes is difficult to define, when it changes all along the weld path.Simufact.welding supports vectors or orientation points by external ROBOCAD-Data ordefined by external text files (XML, CSV).Weld path with orientation vector11Model creation in welding analysis , that means meshing thegeometries, often takes a lot of time and user experience, especiallycreating weld filler elements matching to the neighbour geometries. 21simufact.welding: Welding FillerTherefore Simufact.welding has an automatic Welding Filler ElementCreator, which is following the weld path and creates elements by usergiven parameters.Their nodes are automatically projected onto the neighbour geometries.A pre view window simplifies the user ´s work.Non compatible meshes are supported!The idea of simufact.welding:u Simufact.Welding is a very easy to use, lean GUI, which makes it simple to learn even for welding engineers without experience in Finite Element simulation systems.u Welding processes request their own special treatment of welding heat sources, robots, welding and cooling times. Simple usage is only possible by leaving away all non welding specific things.The welding engineer needs his own tools, especially the clampings, which can be prestressed ornot, can be present from beginning on or activated/ deactivated later during the process.u The source code uses NOKIA´s QT environment. So it can be used in Microsoft WINDOWS and LINUX operating systems as well. LINUX is more and more common for large cluster systems. Awelding simulation tool today has to support parallel computation, for the processes sometimesnecessitate large computer amounts. This is because of the long analysis times of welding,cooling, welding and cooling again.u Parallel computation at a single machine using many CPU´s is possible right now. Computation over network will be available from november 2010.u Simufact.Welding makes non-linear coupled solution possible for everyone. Therefore interior routines create program inputs for the MSC.Marc and Simufact.forming solver with automaticallybest analysis settings. This GUI is able to be predefined by external gateways (by factory settingor user). This makes it possible to take best settings for shipbuilding industries, civil engineering,aerospace or automotive, even if their processes and size of divices are different.u It is embedded into the Simufact product family. That means, it looks like Simufact.forming and is similar in most of its handling. This is an important point, as simulation nowadays grows together.From forming process to welding while importing the geometries and prestresses into anothersimulation tool is no future anymore.1213Welding processes request a time depended post-processing with specialtools for that.Simufact.welding offers a lot of functions like time scroll bar, animation orcurve charts over time, cutting planes or window to window view andresult transfer.6 -12 s: View on leftrobot0 -6s: View on rightrobot14The post processing offers a lot of functions in thermal and mechanical aspects. Only a small choice of them is shown here for example.Evaluating the distorsions, their changes over time, and comparison with original geometry by scaling of thedeformation and is an important feature, as they have a great influence in welding processes.15Distorsions, scaled with a factor of 25 during welding at a tube t-joint:16Curve Charts, time depended for different result values Temperature plot over time ofpoints along the weld path,getting heated up one by one Point selectionExport as CSVdata fileResult selectionSeveral curvecalibration tools17Residual stresses after welding and cooling183D cut with for example scaled distorsion in comparision with original19Simufact.Welding offers a special tool for evaluating the melting bath of a weld seam.The Weld Monitor is is a 2-dimensional cross-section of the welding near field, moving forward with the heat source. Its task is to give the welding engineer a position depended overview about the melting zone to discover non-melded areas as well as burn through.20Weld monitor function as 2D cut through the welded area, for each of the robots, travel depended, actual position shown in result window. The melt pool can easily be analyzed as a travel along the weld paths:21Animated Weld monitor function : (3 times animated)22Okay, you did not see the effect?We made our results a little bit worse to show …23Animated Weld monitor function (slow motion):24Peak temperatures over all process, as temperature plot standard or colourized melt pool:Highest temperature all over process Highest temperature all over process,using Weld Monitor colourVielen Dank f ür Ihre Aufmerksamkeit!info@simufact.dewww.simufact.de Thank you very much much!!。
simufact.welding焊接模拟教程.pptx
学海无 涯
4、在软件 catalog 空白区域点击鼠标右键,在弹出的对话框中选择 Geometries(几何)——Import(导入),然后在弹出的对话框中选择要导入的几 何模型,可以一次性导入所有模型,在后面弹出的单位选择对话框中选择你建模 时所用的单位,然后将 use for all geometries 前面勾选,意为所有几何模型 的单元都采用当前单位。注意:导入的必须是划分好的网格,因为,仿真需要质 量比较好的单元,目前 simufact.welding 软件只支持六面体单元的计算,所以 需要大家自己通过网格划分工具进行网格划分,预计下一个版本的软件中会带有 自动网格划分工具,但是如果你想将仿真做准确,最好不要用自动划分的单元, 还是麻烦一点手动建模吧。
19、切换到 Fillet generation 菜单生成焊缝生死单元,首先选择 Fillet geometry 后面下拉框的 generate fillet,待下面激活后,勾选 Alignment to data points(按照数据点生成生死单元,可以通过本参数,使生成的生死单元 与工件个节点匹配),设定各个参数如图所示,将鼠标停留在 a、b 区域右侧会 出现参数含义示意图。设定完成后,点击 preview,右侧区域会出现生死单元截 面示意图。同理定义其它三条焊缝的生死单元,参数设置均一致。点击 ok 确定。
学海无 涯 13、在 Trajectories 上点击鼠标右键,选择 copy,重复三次。
学海无 涯
14、鼠标左键双击 trajectory-2,在弹出的对话框中点击删除,删除所有坐标 点,点击 yes 确定。
15、点击节点图标,选择第二条焊缝节点,如图所示,定义第二条焊缝路径,点 击 ok 确定。同理定义其它两条焊缝路径。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
simufact.welding焊接模拟教程
案例文件,请使用simufact.welding3.1.0及以上版本打开
之前一直都是发的forming的教程,而simufact.welding网上的资料相对较少,其实simufact.welding软件也是一款很不错的软件,以往我们做焊接非线性大多数都是用marc,但是marc那个不人性化的界面,以及建模的复杂,让新手们望而却步。
simufact基于marc和ife.weldsim两个求解器,取长补短,开发了极易使用的模拟软件,今天我就带大家一起来体验一下吧。
欢迎捧场噢!
1、打开simufact.welding3.1.0软件。
点击新建按钮创建一个新的仿真模拟。
2、在弹出的界面中设定工作名称及保存位置。
点击ok确定
3、在新弹出的界面中,设定重力方向、工件数量、工作平台数量、完全固定夹具数量、力固定夹具数量、数量,设定完成后点击ok确定
重力方向:按照实际与所建立的几何坐标系来设定。
如图所示,模型空间坐标系如下图所示,焊接构件放置于地面工作平台上,因此设定重力方向为Z的负方向。
工件数量:图示为两个工件,上方柱形构件及下方行构件。
数量设置为2
工作平台:起支撑作用,图示,蓝色构件下面的黄色构件为工作平台,一些复杂形状的构件焊接时,内部支撑夹具形状要复杂一些,但是道理是一样的。
它们对工件起到支撑作用。
完全固定夹具:根据实际中夹具工装设定,意为XYZ方向均不可动。
里固定:施加一定的力,使工件固定。
如图示蓝色板类件上面的四个小圆柱,通过它们施加一定的力,让压在工作平台上。
数量:中用到的机械手数量,有些工艺需要多个机械手同时进行焊接,按照实际定义即可。
本案例为一个机械手,顺序焊接底部四条直线焊缝,没道焊缝之间间隔一段时间(机械手转向)。
4、在软件catalog空白区域点击鼠标右键,在弹出的对话框中选择Geometries(几何)——Import(导入),然后在弹出的对话框中选择要导入的几何模型,可以一次性导入所有模型,在后面弹出的单位选择对话框中选择你建模时所用的单位,然后将use for all geometries前面勾选,意为所有几何模型的单元都采用当前单位。
注意:导入的必须是划分好的网格,因为,仿真需要质量比较好的单元,目前simufact.welding软件只支持六面体单元的计算,所以需要大家自己通过网格划分工具进行网格划分,预计下一个版本的软件中会带有自动网格划分工具,但是如果你想将仿真做准确,最好不要用自动划分的单元,还是麻烦一点手动建模吧。
5、将catalog里面的几何模型用鼠标左键拖动到Explorer的进程树相应位置中。
注意:鼠标左键选中一个模型,一直按住鼠标左键,拖动到进程树相应位置下面。
工件拖动到代表工件的图标下面,完全固定的拖动到fix固定夹具下面,力控制夹具拖动到clamp图标下面,没有先后顺序之分。
拖动好之后,会在右侧模型显示区出现模型示意图,在示意图区域,鼠标左键为移动,右键为旋转,中间为缩放
6、在catalog区域点击鼠标右键,选择Material——library,从材料数据库
中选择20MnCr5_sw材料。
点击ok确定。
7、将Materials下方的材料20MnCr5_sw拖动到进程树web、plant及Robot下方。
8、定义焊缝路径,假设我们要定义如下图所示的方向及顺序。
首先在进程树中将plant前面的勾去掉,将plant隐藏起来。
9、catalog空白区域点击鼠标右键选择Sets——New node set选取焊缝节点。
然后在示意图区域按住键盘Ctrl键,使用鼠标左键拾取上图所示第一条焊缝的节点。
拾取完成后点击节点列表界面下方apply changes to node set。
同理,依次拾取其它焊缝节点。
10、焊缝参数定义及生死单元设置,在catalog空白区域点击鼠标右键,选择Trajectories——form node set,从节点生成焊缝路径。
选择第一条焊缝节点,点击ok确定。
11、在新弹出界面中,切换到welding parameters参数定义界面,设定焊接工艺参数如下:焊接速度10mm/s、电流70A、电压18V。
12、切换到heat source热源界面,选择双椭球热源,设定热源尺寸如图所示。
点击ok确定。
13、在Trajectories上点击鼠标右键,选择copy,重复三次。
14、鼠标左键双击trajectory-2,在弹出的对话框中点击删除,删除所有坐标点,点击yes确定。
15、点击节点图标,选择第二条焊缝节点,如图所示,定义第二条焊缝路径,点击ok确定。
同理定义其它两条焊缝路径。
16、将Trajectories下面定义的焊缝依照焊接先后顺序,依次拖动到进程树Robot下方。
17、鼠标左键双击Robot,在弹出的对话框中设定Pause时间为2S,意为第一道焊缝焊完后与第二道焊缝开始前间隔2S(转动时间,工件与周围环境传热过程),依次点击第二、三条焊缝,定义Pause时间为2S。
18.、切换到Trajectories菜单,整体修正焊缝节点位置,选中Projection on surfacr(选中后焊缝节点会自动移动到所生成的生死单元表面),选中orientation。
设置节点总体后退1.41421mm(本案例中焊缝高度为2mm)。
等腰直角三角形的中线。
同理设定其它三条焊缝参数。
19、切换到Fillet generation菜单生成焊缝生死单元,首先选择Fillet geometry后面下拉框的generate fillet,待下面激活后,勾选Alignment to data points(按照数据点生成生死单元,可以通过本参数,使生成的生死单元与工件个节点匹配),设定各个参数如图所示,将鼠标停留在a、b区域右侧会出现参数含义示意图。
设定完成后,点击preview,右侧区域会出现生死单元截面示意图。
同理定义其它三条焊缝的生死单元,参数设置均一致。
点击ok确定。
20、双击Robot可以看出,整个过程在16.008S结束,在进程树中双击webfix1,在弹出的对话框中激活Deactivation,输入20。
意为webfix1在20S时卸载。
同理设定其它夹具卸载时间。
双击进程树clamp1,在弹出的对话框中设定夹具clamp1的卸载时间,勾选use holding force,输入500N,意为夹具clamp1压住工件的力为500N。
21、程序会自动生成焊缝的生死单元,如图所示。
现在回到进程树中,双击simufact,切换到Times菜单,设定总计算时间为60s。
welding:0.5,焊接过程计算保存时间间隔为0.5S。
可以采用自动的时间步长,也可以勾选Fixed time steps 自定义固定的时间步长。
22、点击ok确认,回到主界面,点击箭头图标开始运行。
23、其它参数意义,General settings中可以勾选Suppress mechanical solution (thermal solution)只计算温度场,一般用于检验熔池形状尺寸,因为只计算温度场速度相对较快,我们将熔池参数校核准确后,再进行应力场的耦合计算,这样提高计算效率与精确度。
24、焊缝区域单元局部自动细化。
Refinement菜单可以设定焊缝区域单元细化级别,以及细化区域范围。
Simufact.welding软件可以随着热源的移动,对周围网格进行局部细化。
减少计算量,提高计算精度。
25、点击总界面,红色区域图标,如图所示,可以看总时间表,对于时间,中间间隔时间,何时卸载,总时间均一目了然。